纯电动汽车动力性计算(G)
(完整版)纯电动汽车动力性计算公式
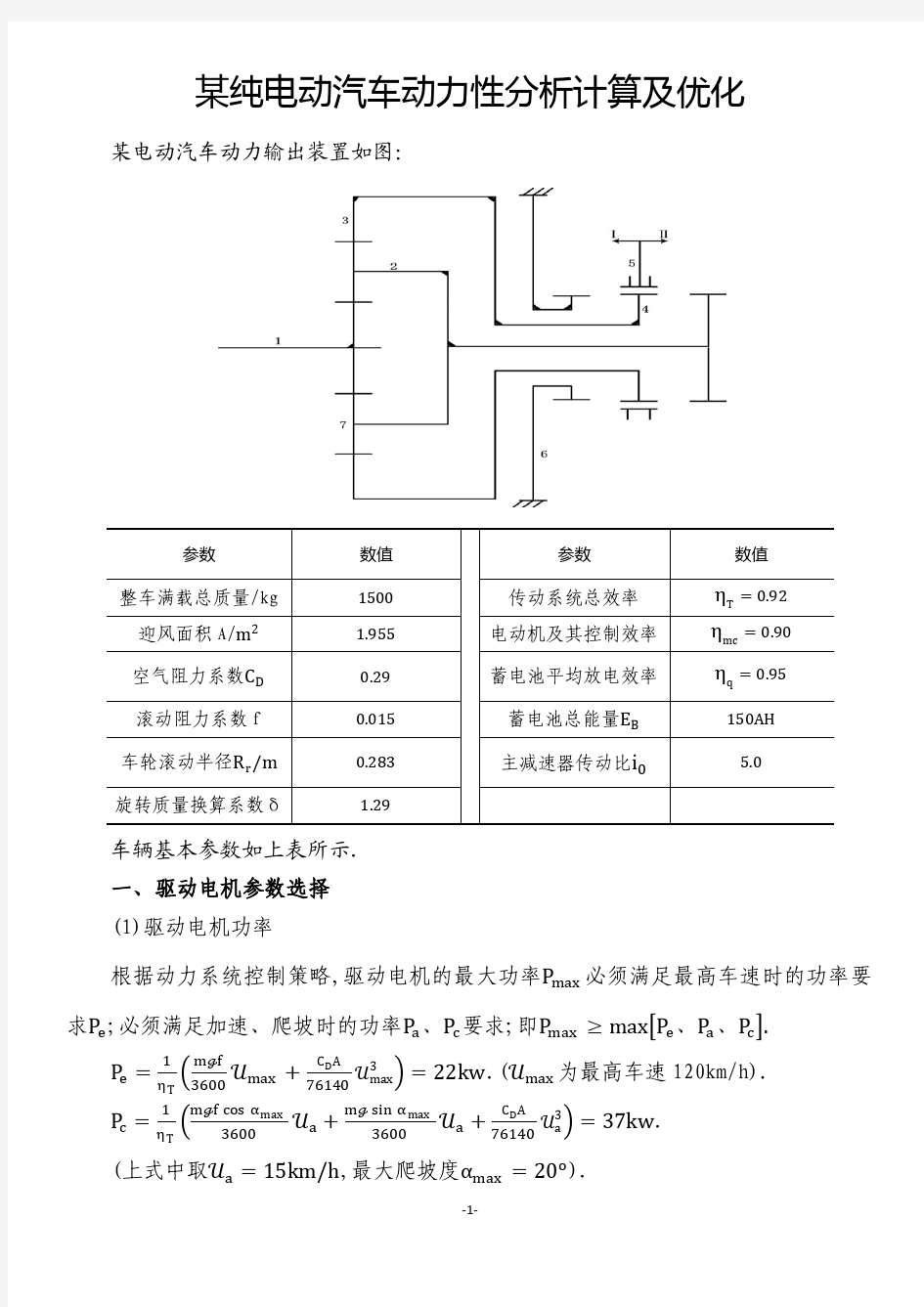
XXEV 动力性计算 1 初定部分参数如下 2 最高行驶车速的计算 最高车速的计算式如下: mph h km i i r n V g 5.43/70295 .61487 .02400377.0.377.00 max ==??? =?= (2-1) 式中: n —电机转速(rpm ); r —车轮滚动半径(m ); g i —变速器速比;取五档,等于1; 0i —差速器速比。 所以,能达到的理论最高车速为70km/h 。 3 最大爬坡度的计算 满载时,最大爬坡度可由下式计算得到,即 00max 2.8)015.0487 .08.9180009 .0295.612400arcsin( ).....arcsin( =-?????=-=f r g m i i T d g tq ηα
所以满载时最大爬坡度为tan( m ax α)*100%=14.4%>14%,满足规定要求。 4 电机功率的选型 纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。 4.1 以最高设计车速确定电机额定功率 当汽车以最高车速m ax V 匀速行驶时,电机所需提供的功率(kw )计算式为: max 2 max ).15.21....(36001 V V A C f g m P d n +=η (2-1) 式中: η—整车动力传动系统效率η(包括主减速器和驱动电机及控制器的工作效率),取0.86; m —汽车满载质量,取18000kg ; g —重力加速度,取9.8m/s 2; f —滚动阻力系数,取0.016; d C —空气阻力系数,取0.6; A —电动汽车的迎风面积,取2.550×3.200=8.16m 2(原车宽*车身高); m ax V —最高车速,取70km/h 。 把以上相应的数据代入式(2-1)后,可求得该车以最高车速行驶时,电机所需提供的功率(kw ),即 kw 1005.8970)15.217016.86.0016.08.918000(86.036001).15 .21....(360012 max 2 max <kw V V A C f g m P D n =???+???=+?=η (3-2) 4.2满足以10km/h 的车速驶过14%坡度所需电机的峰值功率 将14%坡度转化为角度:018)14.0(tan ==-α。 车辆在14%坡度上以10km/h 的车速行驶时所需的电机峰值功率计算式为:
纯电动汽车动力性计算公式
纯电动汽车动力性计算公式
XXEV 动力性计算 1 初定部分参数如下 整车外廓(mm ) 11995×2550×3200(长×宽×高) 电机额定功率 100kw 满载重量 约18000kg 电机峰值功率 250kw 主减速器速比 6.295:1 电机额定电压 540V 最高车(km/h ) 60 电机最高转速 2400rpm 最大爬坡度 14% 电机最大转矩 2400Nm 2 最高行驶车速的计算 最高车速的计算式如下: mph h km i i r n V g 5.43/70295 .61487 .02400377.0.377.00 max ==??? =?= (2-1) 式中: n —电机转速(rpm ); r —车轮滚动半径(m ); g i —变速器速比;取五档,等于1; 0i —差速器速比。 所以,能达到的理论最高车速为70km/h 。 3 最大爬坡度的计算 满载时,最大爬坡度可由下式计算得到,即 00max 2.8)015.0487 .08.9180009 .0295.612400arcsin( ).....arcsin( =-?????=-=f r g m i i T d g tq ηα
kw 100w 5.8810)15.211016.86.08cos 016.08.9180008sin 8.918000(86.036001).15 .21..cos ...sin ..(36001 20 02 max <k V V A C f g m g m P slope slope D =???+???+???=++=ααη 从以上动力性校核分析可知,所选100kw/540V 交流感应电机的功率符合所设计的动力性参数要求。 5 动力蓄电池组的校核 5.1按功率需求来校核电池的个数 电池数量的选择需满足汽车行驶的功率要求,并且还需保证汽车在电池放电达到一定深度的情况下还能为汽车提供加速或爬坡的功率要求。 磷酸锂铁蓄电池的电压特性可表示为: bat bat bat bat I R U E .0+= (4-1) 式中: bat E —电池的电动势(V ); bat U —电池的工作电压(V ); 0bat R —电池的等效内阻(Ω); bat I —电池的工作电流(A )。 通常,bat E 、0bat R 均是电池工作电流bat I 以及电流电量状态值SOC (State Of Charge )的函数,进行电池计算时,要考虑电池工作最差的工作状态。假设SOC 为其设定的最小允许工作状态值(SOC low ),对应的电池电动势bat E 和电池等效内阻0bat R 来计算电池放电的最大功率,即可得到如下计算表达式: 铅酸电池放电功率: bat bat bat bat bat bat bd I I R E I U P )..(.0-== (4-2) 上式最大值,即铅酸蓄电池在SOC 设定为最小允许工作状态值时所能输出的最大功率为: 2 max 4bat bat bd R E P = (4-3)
电动车动力性能
GB/T 18385-2005 (2005-07-13发布,2006-02-01实施) 前言 本标准修改采用ISO 8715:2001《电动道路车辆道路行驶特性》(英文版)。 标准格式按照GB/T 1.1—2000的要求进行编写,在附录B中给出了本标准章条号与ISO 8715:2001章条编号的对照一览表。 考虑到我国电动汽车开发的实际情况,在采用ISO 8715:2001时,本标准在技术内容上做了一些修改。有关技术性差异已编入正文,并在它们所涉及的条款的页边处用垂直单线标识。在附录C中给出了这些技术性差异及其原因的一览表以供参考。 本标准代替GB/T 18385—2001《电动汽车动力性能试验方法》。本标准与上一版本的主要差异: ——适用范围进行了修改,由适用于最大设计总质量不超过3 500 kg的电力驱动的电动汽车修改为适用于纯电动汽车。由于适用范围扩大,为适应3 500 kg以上的纯电动汽车的要求,标准的部分内容做了相应的修改。 ——第3章中的术语动载半径及定义按照GB/T 6326修改为动负荷半径,定义直接引用GB/T 6326。 ——试验记录表进行了适当的调整。 本标准的附录A、附录B和附录C均为资料性附录。 本标准由国家发展和改革委员会提出。 本标准由全国汽车标准化技术委员会归口。 本标准起草单位:中国汽车技术研究中心。 本标准主要起草人:赵静炜。 本标准首次发布于2001年,本次为第一次修订。 GB/T 18385-2005 电动汽车动力性能试验方法 Elestric vehiles-Power performance-Test method (ISO 8715:2001 Elestric road vehicles-Road operating characteristics,MOD) 1 范围 本标准规定了纯电动汽车的加速特性、最高车速及爬坡能力等的试验方法。 本标准适用于纯电动汽车。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GB/T 3730.2 道路车辆质量词汇和代码(idt IS0 1176:1990) GB/T 6326 轮胎术语(GB/T 6326—1994,neq ISO 3877-1:1978)
电动汽车动力性能分析与计算
电动汽车与传统内燃机汽车之间的主要差别是采用了不同的动力源,它由蓄电池提供电能,经过驱动系统和电动机,驱动电动汽车行驶。电动汽车的能量供给和消耗,与蓄电池的性能密切相关,直接影响电动汽车的动力性和续驶里程,同时影响电动汽车行驶的成本效益。 电动汽车在行驶中,由蓄电池输出电能给电动机,用于克服电动汽车本身的机械装置的内阻力,以及由行驶条件决定的外阻力。电动汽车在运行过程中,行驶阻力不断变化,其主电路中传递的功率也在不断变化。对电动汽车行驶时的受力状况以及主电路中电流的变化进行分析,是研究电动汽车行驶性能和经济性能的基础。 1、电动汽车的动力性分析 1.1 电动汽车的驱动力 电动汽车的电动机输出轴输出转矩M,经过减速齿轮传动,传到驱动轴上的转矩Mt,使驱动轮与地面之间产生相互作用,车轮与地面作用一圆周力F0,同时,地面对驱动轮产生反作用力Ft.Ft 与F0大小相等方向相反,Ft方向与驱动轮前进方向一致,是推动汽车前进的外力,将其定义为电动汽车的驱动力。有: 电动汽车机械传动装置是指与电动机输出轴有运动学联系的减速齿轮传动箱或变速器、传动轴及主减速器等机械装置。机械传动链中的功率损失包括:齿轮啮合点处的摩擦损失、轴承中的摩擦
损失、旋转零件与密封装置之间的摩擦损失以及搅动润滑油的损失等。 1.2 电动汽车行驶方程式与功率平衡 电动汽车在上坡加速行驶时,作用于电动汽车的阻力与驱动力始终保持平衡,建立如下的汽车行驶方程式: 以电动汽车行驶速度va乘以(2)式两端,考虑机械损失,再经过单位换算之后可得: 或 由(4)、(5)两式可以看出,电动汽车在行驶时,电动机传递到驱动轮的输出功率与体现在驱动轮上的阻力功率始终保持平衡。将(4)变换可得: 式中PM为电动机的输出功率。 用曲线图表示上述功率关系,将电动机的输出功率、汽车经常遇到的阻力功率与对应车速的关系归置在x-y坐标图上得到电动汽车功率平衡图如图1所示。
电动汽车动力匹配计算规范(纯电动)
XH-JS-04-013 电动汽车动力匹配计算设计规范 编制:年月日 审核:年月日 批准:年月日 XXXX有限公司发布
目录 一、概述 (1) 二、输入参数 (1) 2.1 基本参数列表 (1) 2.2 参数取值说明 (1) 三、XXXX动力性能匹配计算基本方法 (2) 3.1 驱动力、行驶阻力及其平衡 (3) 3.2 动力因数 (6) 3.3 爬坡度曲线 (6) 3.4 加速度曲线及加速时间 (7) 3.5 驱动电机功率的确定 (7) 3.6 主驱动电机选型 (8) 3.7 主减速器比的选择 (8) 参考文献 (9)
一、概述 汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。动力性是各种性能中最基本、最重要的性能之一。动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。 二、输入参数 2.1 基本参数列表 进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的基本参数是保证计算结果精度的基础。下表是XXXX动力匹配计算必须的基本参数,其中发动机参数将在后文专题描述。 表1动力匹配计算输入参数表。 2.2 参数取值说明 1)迎风面积 迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。XXXX车型迎风面积为A
一般取值5-8 m 2 。 2)动力传动系统机械效率 根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率T η主要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等部分串联组成。 采用有级机械变速器传动系的车型传动系统效率一般在82%到85%之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进行修正,通常取传动系统效率T η值为78-82%。 3)滚动阻力系数f 滚动阻力系数采用推荐的客车轮胎在良好路面上的滚动阻力系数经验公式进行匹配计算: f =??? ???????? ??+??? ??+4 410100100a a u f u f f c 其中:0f —0.0072~0.0120以上; 1f —0.00025~0.00280; 4f —0.00065~0.002以上; a u —汽车行驶速度,单位为km/h ; c —对于良好沥青路面,c =1.2。 三、 XXXX 动力性能匹配计算基本方法 汽车动力性能匹配计算的主要依据是汽车的驱动力和行驶阻力之间的平衡关系,汽车的驱动力-行驶阻力平衡方程为 j i w f t F F F F F +++= (1)
纯电动汽车动力性计算公式
纯电动汽车动力性计算公式 XXEV 动力性计算 2最咼行驶车速的计算 最高车速的计算式如下: n r V max 0.377 - i g i o 0.377 2400 °.487 1 6.295
70km/h 43.5mph (2-1) 式中: n—电机转速(rpm); r—车轮滚动半径(m ); i g —变速器速比;取五档,等于1;i。一差速器速比。所以,能达到的理论最高车速为70km/h。 3最大爬坡度的计算 满载时,最大爬坡度可由下式计算得到,即 max arcsin(%山」0. d f) arcsin(2400 1 6.2950.9 0.015)8.20 m.g.r 18000 9.8 0.487
所以满载时最大爬坡度为tan(a-)*100%=14. 4%>14%,满足规定要求. 4电机功率的选型 纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。 4.1以最高设计车速确定电机额定功率 当汽车以最高车速匀速行驶时,电机所需提供的功率(kw)计算式为: 36咖盹八唱游心(2-1) 式中: n—整车动力传动系统效率〃(包括主减速器和驱动电机及控制器的工作效率),取0.86; m—汽车满载质量,取18000kg; g—重力加速度,取9.8m/s2; f—滚动阻力系数,取0.016; Cd—空气阻力系数,取0?6; A—电动汽车的迎风面积,取2?550x3?200=8?16m2(原车宽*车身高);最高车速,取70km/ho 把以上相应的数据代入式(2?1)后,可求得该车以最高车速行驶时,电机所需提供的功率(kw),即 二总制诃和E6+吆需型)x7。 =39.5kw<\ OOkw (3-2) 4.2满足以10km/h的车速驶过14%坡度所需电机的峰值功率 将14%坡度转化为角度:a = tan-,(0.14) = 8°o 车辆在14%坡度上以10km/h的车速行驶时所需的电机峰值功率计算式为:
电动车电机及电池选型计算
电动车电机及电池选型 计算 文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
C V11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 2、关于CV11整车参数 3、轮边电机选型计算 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率
其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;tm为起步加速过程的时间(s);Vm为起步加速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩 电机的基数、额定转矩 电机符合基速以下恒转矩,基速以上恒功率,因此在基速时,电机有最大功率和最大转矩。根据以下公式: 经过计算,取额定转速为250rpm,额定转矩为124Nm。
电动汽车动力匹配设计规范
XXXXXX Q/XXX X X X X X X X X X X有限公司企业标准 XXXXXXXXXXXXXXXXXXXX 电动汽车动力匹配设计规范 XXXX-XX -XX 发布 XXXX-XX -XX 实施 XXXXXXXX有限公司发布
Q/XXX XXXXXXX-201X 目次 前言 (Ⅱ) 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 技术要求 (3) 4.1 评价指标 (3) 4.2 计算方法 (4) 4.3 基础数据收集和输入 (10) 4.4 计算任务和匹配优化 (10) 4.5 计算结果输入及数据分析 (13)
Q/XXX XXXXXXX-201X 前言 我公司缺少关于动力匹配方面的设计规范,给整车动力性、经济性方面的计算造成障碍。自本规范下发之日起,本文件将指导后续工作中动力性、经济性的计算。 本标准按照GB/T 1.1—2009给出的规则起草。 本标准由XXXX提出。 本标准由XXXX负责起草。 本标准主要起草人:XXX 本标准于XXXX年XX月首次发布。
Q/XXX XXXXXXX-201X 电动汽车动力匹配设计规范 1范围 本规范规定了电动汽车动力匹配设计规范的术语和定义、技术要求、试验方法、检验规则、标志、包装、运输和贮存。 本规范适用于XXXX整车动力性能匹配与计算。 2规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,凡是不注日期的引用文件,其最新版本适用于本标准。 GB/T 12534-1990 汽车道路试验方法通则 GB/T 12544-2012 汽车最高车速试验方法 GB/T 12543-2009 汽车加速性能试验方法 GB/T 18386-2005 电动汽车能量消耗率和续驶里程试验方法 GB/T 19596-2004 电动汽车术语 3术语和定义 GB/T 19596中界定的术语和定义适用于本标准。下列术语和定义适用于本文件。 3.1 续驶里程 电动汽车在动力蓄电池完全充电状态下,以已定的行驶工况,能连续行程的最大距离,单位为km。 3.2 能量消耗率 电动汽车经过规定的试验循环后动力蓄电池重新冲带你至试验前的容量,从电网上得到的电能除以行驶里程所得的值,单位为Wh/km。 3.3 最高车速 电动汽车能够往返各持续行程3 km距离的最高平均车速。 3.3 30分钟最高车速 电动汽车能够持续行驶30 min以上的最高平均车速。 3.4 加速能力V1至V2 电动汽车从速度V1加速到速度V2所需的最短时间。 3.5 爬坡车速 电动汽车在给定坡度的坡道上能够持续行驶1 km以上的最高平均车速。 3.6
电动汽车传动公式
电动汽车传动公式 电动汽车与传统内燃机汽车之间的主要差别是采用了不同的动力源,它由蓄电池提供电能,经过驱动系统和电动机,驱动电动汽车行驶。电动汽车的能量供给和消耗,与蓄电池的性能密切相关,直接影响电动汽车的动力性和续驶里程,同时影响电动汽车行驶的成本效益。 电动汽车在行驶中,由蓄电池输出电能给电动机,用于克服电动汽车本身的机械装置的内阻力,以及由行驶条件决定的外阻力。电动汽车在运行过程中,行驶阻力不断变化,其主电路中传递的功率也在不断变化。对电动汽车行驶时的受力状况以及主电路中电流的变化进行分析,是研究电动汽车行驶性能和经济性能的基础。 1 电动汽车的动力性分析 1.1 电动汽车的驱动力 电动汽车的电动机输出轴输出转矩M,经过减速齿轮传动,传到驱动轴上的转矩Mt,使驱动轮与地面之间产生相互作用,车轮与地面作用一圆周力F0,同时,地面对驱动轮产生反作用力Ft.Ft与F0大小相等方向相反,Ft方向与驱动轮前进方向一致,是推动汽车前进的外力,将其定义为电动汽车的驱动力。有: 电动汽车机械传动装置是指与电动机输出轴有运动学联系的减速齿轮传动箱或变速器、传动轴及主减速器等机械装置。机械传动链中的功率损失包括:齿轮啮合点处的摩擦损失、轴承中的摩擦损失、旋转零件与密封装置之间的摩擦损失以及搅动润滑油的损失等。 1.2 电动汽车行驶方程式与功率平衡 电动汽车在上坡加速行驶时,作用于电动汽车的阻力与驱动力始终保持平衡,建立如下 的汽车行驶方程式: 以电动汽车行驶速度va乘以(2)式两端,考虑机械损失,再经过单位换算之后可得: 或 由(4)、(5)两式可以看出,电动汽车在行驶时,电动机传递到驱动轮的输出功率与体
关于电动车电机及电池选型计算
关于电动车电机及电池选 型计算 This manuscript was revised on November 28, 2020
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加 速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩
电动汽车动力匹配计算规范(纯电动)
电动汽车动力匹配计算设计规范 编制:年月日 审核:年月日 批准:年月日 XXXX有限公司发布
目录 一、概述 (1) 二、输入参数 (1) 2.1 基本参数列表 (1) 2.2 参数取值说明 (1) 三、XXXX动力性能匹配计算基本方法 (2) 3.1 驱动力、行驶阻力及其平衡 (3) 3.2 动力因数 (6) 3.3 爬坡度曲线 (6) 3.4 加速度曲线及加速时间 (7) 3.5 驱动电机功率的确定 (7) 3.6 主驱动电机选型 (8) 3.7 主减速器比的选择 (8) 参考文献 (9)
一、概述 汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。动力性是各种性能中最基本、最重要的性能之一。动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。 二、输入参数 2.1 基本参数列表 进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的基本参数是保证计算结果精度的基础。下表是XXXX动力匹配计算必须的基本参数,其中发动机参数将在后文专题描述。 表1动力匹配计算输入参数表。 2.2 参数取值说明 1)迎风面积 迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。XXXX车型迎风面积为A
一般取值5-8 m 2 。 2)动力传动系统机械效率 根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率T η主要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等部分串联组成。 采用有级机械变速器传动系的车型传动系统效率一般在82%到85%之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进行修正,通常取传动系统效率T η值为78-82%。 3)滚动阻力系数f 滚动阻力系数采用推荐的客车轮胎在良好路面上的滚动阻力系数经验公式进行匹配计算: f =??? ???????? ??+??? ??+4 410100100a a u f u f f c 其中:0f —0.0072~0.0120以上; 1f —0.00025~0.00280; 4f —0.00065~0.002以上; a u —汽车行驶速度,单位为km/h ; c —对于良好沥青路面,c =1.2。 三、 XXXX 动力性能匹配计算基本方法 汽车动力性能匹配计算的主要依据是汽车的驱动力和行驶阻力之间的平衡关系,汽车的驱动力-行驶阻力平衡方程为 F F F F F +++=
CRUISE纯电动车动力性能仿真及优化
万方数据
万方数据
万方数据
万方数据
万方数据
CRUISE纯电动车动力性能仿真及优化 作者:姜海斌, 黄宏成 作者单位:上海交通大学汽车工程研究院汽车电子控制技术国家工程实验室,上海,200240 刊名: 机械与电子 英文刊名:MACHINERY & ELECTRONICS 年,卷(期):2010,""(4) 被引用次数:0次 参考文献(9条) 1.康龙云电动汽车最新技术 2008 2.王斌.李征CRUISE软件在混合动力汽车性能仿真中的应用 2007(3) 3.赵海峰基于CRUISE软件的AMT车辆性能仿真分析与实验研究 2005 4.王保华.罗永革基于CRUISE的汽车建模与仿真 2005(2) 5.李国良.初亮.鲁和安电动汽车续驶里程的影响因素 2000(3) 6.杜发荣.吴志新电动汽车传动系统设计与续驶里程研究 2006(11) 7.余志生汽车理论 2000 8.Cheng Chang Ting Hybrid electric vehicle design to minimize energy use 2000 9.Sha Y L The power design and calculation of EVS 1999 相似文献(5条) 1.学位论文曹明柱混合动力电动车驱动电机控制系统研究2006 随着能源枯竭和环境污染问题的日益突出,人们把目光转向了纯电动车和混合动力电动车。由于纯电动车电池技术尚有待进一步提高,导致纯电动车距离市场化的目标仍然有一段距离,为此,开发混合动力电动车意义重大。混合动力电动车中,一般同时采用驱动电机和发动机作为动力装置,通过先进的控制系统使两种动力装置有机协调匹配工作,实现最佳能量分配,达到低能耗、低污染及高度自动化。因而,对混合动力电动车及其部件的控制是其关键技术之一。 现代电子控制单元开发流程——V模式采用计算机辅助工具进行,可以支持从需求定义直到最终产品的全过程。采用V模式开发电子控制单元可以缩短开发周期、节约开发成本,而dSPACE仿真平台是支持这一流程的重要工具。 本文针对混合动力电动车的关键技术之一——驱动电机的控制,利用dSPACE仿真平台、参照V模式进行了较为全面的研究。论文的主要内容包括:基于图形化建模工具matlab/simulink建立了某串联式混合动力电动车的系统仿真模型,并对其性能进行仿真;阐述了混合动力电动车驱动电机——无刷直流电机控制单元的建模过程,按照设计的控制算法建立电机控制单元的matlab/simulink仿真模型,利用dSPACE仿真平台建立电机快速控制原型系统并进行实验;在分析无刷直流电机控制系统结构和工作原理的基础上,实现了电机控制器软、硬件的设计;建立了无刷直流电机模型,利用dSPACE仿真平台进行了无刷直流电机系统数字仿真和电机控制系统硬件在环仿真;构建了混合动力电动车试验平台,进行了实车试验。 通过实验结合理论分析,可以得到如下的结论: 1.串联式混合动力电动车以混合动力方式运行时可以提高蓄电池的使用效率、延长蓄电池的使用寿命,其一次充电续驶里程明显增加。 2.建立的电机快速控制原型系统可以快速的验证电机控制算法的有效性,实验结果表明,本文设计的电机控制算法可以实现对电机的控制,为电机控制系统的实现奠定了基础。 3.采用模块化设计思想,开发了电机控制系统的软、硬件,并对其进行硬件在环仿真实验,实验结果证明控制效果良好。 4.构建了混合动力电动车试验平台,进行了实车试验,试验结果表明,所设计的电机控制系统能够实现对电机的有效控制。 2.学位论文祁俊荣微型高级纯电动乘用车动力系统的建模与仿真2007 燃油汽车给人类带来了严重的环境污染和石油资源危机问题,为了解决这两大问题,世界各国不得不积极寻求开发排放低、使用新能源的新型交通工具。电动汽车被看成是能够解决内燃机汽车诸多问题的重要途径之一,电动汽车呈现出加速发展的趋势。在汽车市场竞争日趋激烈的今天,如何快速、低成本的开发出技术指标高、符合市场需要的电动汽车,成为了新的课题。 本文在对电动汽车相关技术进行综合分析的基础上,结合电动汽车的结构特点,通过比较几种常见的动力传动系统布置方案,针对电动汽车的特殊要求及其对动力系统的基本要求,同时考虑到成本问题和现有技术水平,提出了一种EV动力传动系方案。在此基础上,针对选用的动力传动方案,进行了EV动力传动系中电机、蓄电池和变速器的选型和参数设计,构建了一个完整的EV动力系统,并利用MATLAB软件编程构建了两个GUI界面(EV乘用车性能计算平台和EV乘用车性能测试平台)对前面的参数设计过程和参数设计的结果进行了正逆向验证,结果表明构建的EV动力系统中各动力元件的参数设计能够满足设计要求。 在MATLAB/Simulink环境下,以Advisor为仿真平台,依据动力系统的结构、电机的控制策略和整车的工作模式,对相关模块进行修改,建立了EV传动系的电机、蓄电池、电机控制器以及整车的仿真模型,利用建立的模型,在Advisor仿真软件中选择ECE-EUDC、UDDS和HWFET三个循环工况对所建立的动力系统进行了仿真分析,得出了该纯电动乘用车动力性、经济性以及一些重要性能曲线的仿真结果;对于纯电动汽车,它的部件非常多,用来表示它的参数也很多,为了更好的研究纯电动车特有的影响性能的因素,以便更好地分析各部件选型结果对整车性能的影响,在ECE-EUDC循环工况下,本文对纯电动车提供了选用不同电池(镍氢电池/铅酸电池)和不同变速器(两挡/五档)两种仿真结果的比较,仿真结果表明,选用不同的电池和不同的变速器对整车的性能有一定影响,对本电动车来说,选用镍氢电池和两挡变速器的配置,其动力性能最好,利于蓄电池的使用,且车辆的续驶里程、车速、加速性能等基本满足性能指标要求,说明该电动车的整车匹配方案是合理的,零部件的参数选择是合理的;最后,利用Advisor中的自动尺寸设计方法对电动汽车传动系统的主要参数,进行了优化计算,根据计算结果,利用Advisor进行了再次仿真并与优化前的仿真结果进行了比较,结果表明,优化后,整车的性能进一步提高。 3.学位论文华宏懿镍氢蓄电池的数学建模及其电池管理系统实现2006 随着社会的发展,汽车的普及率越来越高。但是在城市中,机动车带来的环境污染和能源消耗越来越严重,成为我们亟待解决的重大问题,而HEV正是一个理想的解决方案。它的主要能源依然是化石燃料,是以蓄电池能量为辅助动力驱动机动车加速行驶,并在刹车、发动机怠速运转状态回收能量。
关于电动车电机及电池选型计算
关于电动车电机及电池 选型计算 标准化管理部编码-[99968T-6889628-J68568-1689N]
CV11改装成四轮轮边驱动电动车 1、参考纯电动车的设计目标,本课题提出了其基本性能要求和指标如下: 1)最高速度≥45Km/h; 2)最大爬坡度≥20%(5Km/h); 3)30Km/h匀速行驶下的续驶里程≥120Km; 4)0—30Km/h加速时间≤10S。 电机功率 根据车辆的功率平衡方程式,有: 因为最高车速为45Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,风阻系数为,迎风面积为㎡。 因此计算得出电机在最高车速下的驱动功率为,因此每个电机最大功率为。 根据爬坡性能确定的最大功率 其中爬坡速度为5Km/h,传动系效率为,质量为1485Kg,滚动阻力系数为,爬坡度为20%。 考虑到坡度不大的情况下,cosα=1,sinα=tanα。 因此计算得出电机在以5Km/h,20%爬坡时的驱动功率为,因此每个电机最大功率为。 汽车起步加速过程可以按下式来表示: 其中x为拟合系数,一般取左右;t m为起步加速过程的时间(s);Vm为起步加 速过程的末车速(Km/h)。 整车在加速过程的末时刻,动力源输出最大功率,此时速度为30Km/h,旋转质量换算系数为,加速时间为10S,,拟合系数x取。 因此计算得出电机要满足从0—30Km/h加速时间为10S需要的最大功率为,因此每个电机最大功率为。 综上所诉,电机的最大驱动功率应满足: 则有:最大功率为,取过载系数为2,因此额定功率为。 电机最高转速 电机转速及转矩公式如下: 其中最大车速为45Km/h,轮胎滚动半径为。 电机最大转矩
某纯电动汽车动力系统匹配计算报告
电动车动力参数匹配计算 表2动力性参数 Tab.2Dynamics Parameters 参数 指标续驶里程/km 100-180最高车速/(1km h -?) 50-700-0.7max v 1km h -?加速时间/s ≤15201km h -?最大爬坡度20%-25% 1整车额定功率计算 电动汽车在行驶过程中,整车额定功率需求一般由在平直路面上最高车速行驶所需功率决定,具体计算公式为: t max max D rated v .v A C mgf P ηρ??? ? ? ?? ?? ???+≥2 632136001(1) 式中:rated P 为整车额定功率,W k ;m 为电动汽车满载质量,kg ;g 为质量加速度, 9.82s /m ;f 为滚动阻力系数;ρ为空气密度,为1.2263m /kg ;D C 为空气阻力系数;max v 为 最高车速,h /km ;t η为传动系统效率,取0.95。 带入相关参数后计算得:rated P ≥(4.1+2.5)W k 。 2整车最大功率计算 整车最大功率需求一般出现在加速或上坡时,故依此选定。2.1加速过程最大功率 在加速过程中最大功率为: t a D max a v .a v A C mgf ma P ηρδ??? ? ? ???? ???++≥2 632136001(2) 式中:max a P 为加速时整车功率需求,W k ;δ为汽车旋转质量换算系数;a 为加速度,2s /m ;a v 为加速目标车速,h /km 。 带入相关参数后计算得: 表1整车参数 Tab.1Vehicle Parameters 参数指标驱动形式集中电机驱动 整备质量/kg xx 满载质量/kg xx 轴距/m xx 质心到前轴距离/m -质心高度/m -主传动比xx 车轮滚动半径/m xx 迎风面积/2m xx 风阻系数xx 滚动阻力系数xx 汽车旋转质量换算系数 xx 附件功率/W k xx
纯电动汽车动力性计算公式(可编辑修改word版)
XXEV 动力性计算 1初定部分参数如下 整车外廓(mm)11995×2550× 3200(长×宽×高) 电机额定功率100kw 满载重量约 18000kg 电机峰值功率250kw 主减速器速比 6.295:1 电机额定电压540V 最高车(km/h)60 电机最高转速2400rpm 最大爬坡度14% 电机最大转矩2400Nm 2最高行驶车速的计算 最高车速的计算式如下: V max = 0.377 ? n.r i g i = 0.377 ?2400 ? 0.487 1? 6.295 = 70km / h = 43.5mph 1) 式中: n—电机转速(rpm); r—车轮滚动半径(m); i g —变速器速比;取五档,等于1; i 0 —差速器速比。 (2- 所以,能达到的理论最高车速为70km/h。 3最大爬坡度的计算 满载时,最大爬坡度可由下式计算得到,即 =arcsin(T tq.i g.i0.d-f)=arcsin(2400?1?6.295?0.9-0.015)=8.20 max m.g.r18000 ? 9.8? 0.487
所以满载时最大爬坡度为 t a n ( max )*100%=14.4%>14%,满足规定要求。 4 电机功率的选型 纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。 4.1 以最高设计车速确定电机额定功率 当汽车以最高车速V max 匀速行驶时,电机所需提供的功率(kw )计算式为: 1 C .A .V 2 P n = (m .g . f 3600 + d max ).V 21.15 max (2-1) 式中: η—整车动力传动系统效率(包括主减速器和驱动电机及控制器的工作效 率),取 0.86; m —汽车满载质量,取 18000kg ; g —重力加速度,取 9.8m/s 2; f —滚动阻力系数,取 0.016; C d —空气阻力系数,取 0.6; A —电动汽车的迎风面积,取 2.550× 3.200=8.16m 2(原车宽*车身高); V max —最高车速,取 70km/h 。 把以上相应的数据代入式(2-1)后,可求得该车以最高车速行驶时,电机所需提供的功率(kw ),即 1 C .A .V 2 P n = (m .g . f + D max ).V max 3600 ? = 1 3600 ? 0.86 21.15 (18000 ? 9.8? 0.016 + 0.6 ?8.16 ? 702 21.15 ) ? 70 (3-2) = 89.5kw <100kw 4.2 满足以 10km/h 的车速驶过 14%坡度所需电机的峰值功率 将 14%坡度转化为角度: = tan -1(0.14) = 80 。 车辆在 14%坡度上以 10km/h 的车速行驶时所需的电机峰值功率计算式为:
电动汽车动力匹配设计规范(2)
电动汽车动力匹配设计规范(2) 1 2020年4月19日
XXXXXX Q/XXX XXXXXXXXXXXXXXXXX XXX
文档仅供参考,不当之处,请联系改正。 II 2020年4月19日 XXXX-XX -XX 发布 XXXX-XX -XX 实施 XXXXXXXX 有限公司 发 布 目 次 前言 ................................................................................................................. Ⅱ 1 范围 ............................................................................................................... 1 2 规范性引用文件 ........................................................................................... 1 3 术语和定义 (1) 4 技术要求 ....................................................................................................... 3 4.1 评价指标 .................................................................................................... 3 4.2 计算方法 .................................................................................................... 4 4.3 基础数据收集和输入 ............................................................................... 10 4.4 计算任务和匹配优化 ............................................................................... 10 4.5 计算结果输入及数据分析 .. (13) 电动汽车动力匹配设计规范 X X X X X X X X X X 有限公司企业标准
电动汽车动力匹配计算规范(纯电动)
XH-JS-04-013 XXXX有限公 司 技术规范 电动汽车动力匹配计算设计规范 编制: 审核: 批准: 2015-10-15 发布 XXXX有限公司发布编号:2015-001 2015-11-1 实施
一、概述. 二、输入参数. 2.1基本参数列表 2.2参数取值说明 三、XXX 动力性能匹配计算基本方法 3.1驱动力、行驶阻力及其平衡 参考文献 3.2 动力因数 6.. 3.3 爬坡度曲线 6.. 3.4 加速度曲线及加速时间 3.5 驱动电机功率的确定 3.6 主驱动电机选型 8. 3.7 主减速器比的选择 8. 3.
汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。动力性是各种性能中最基本、最重要的性能之一。动力性的好坏, 直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。 输入参数 2.1基本参数列表 进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的 基本参数是保证计算结果精度的基础。下表是XXXX动力匹配计算必须 的基本参数,其中发动机参数将在后文专题描述。 表1动力匹配计算输入参数表。 2.2参数取值说明1)迎风面积 迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。XXXX车型迎风面积为A
般取值5-8 m 2。 2)动力传动系统机械效率 根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率 要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等 部分串联组成。 采用有级机械变速器传动系的车型传动系统效率一般在 82 %到85% 之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进 行修正,通常取传动系统效率 T 值为78-82 %。 3)滚动阻力系数f 滚动阻力系数采用推荐的客车轮胎在良好路面上的滚动阻力系数经 验公式进行匹配计算: 其中:f o — 0.0072 ?0.0120 以上; f i — 0.00025 ?0.00280 ; f 4 — 0.00065 ?0.002 以上; c —对于良好沥青路面,c =l.2。 XXXX 动力性能匹配计算基本方法 汽车动力性能匹配计算的主要依据是汽车的驱动力和行驶阻力之间 的平衡关系,汽车的驱动力-行驶阻力平衡方程为 F t F f F w F i F j f = C f 0 f 亠 100 4 f 4 — 100 U a —汽车行驶速度,单位为 km/h ;