矢量控制系统电流调节器设计及补偿控制方式_苏建徽

第20卷第5期合肥工业大学学报(自然科学版)Vo1.20№5 1997年10月JOU RNAL OF HEFEI UNIVERSIT Y OF TECHNOLOGY Oct.1997矢量控制系统电流调节器
设计及补偿控制方式
苏建徽 陈 梅
摘要 重点讨论在滑差型矢量控制系统中,采用异步S PWM电流环时的参数设计,以及该环对系统动态特性的影响和相应对策,系统实验以11k W交流变频电机为控制对象,最高转速4500r/min,实验结
果令人满意。
关键词 矢量控制系统;高转速区域;电流调节器;补偿
中图分类号 TP271.5a
0 引 言
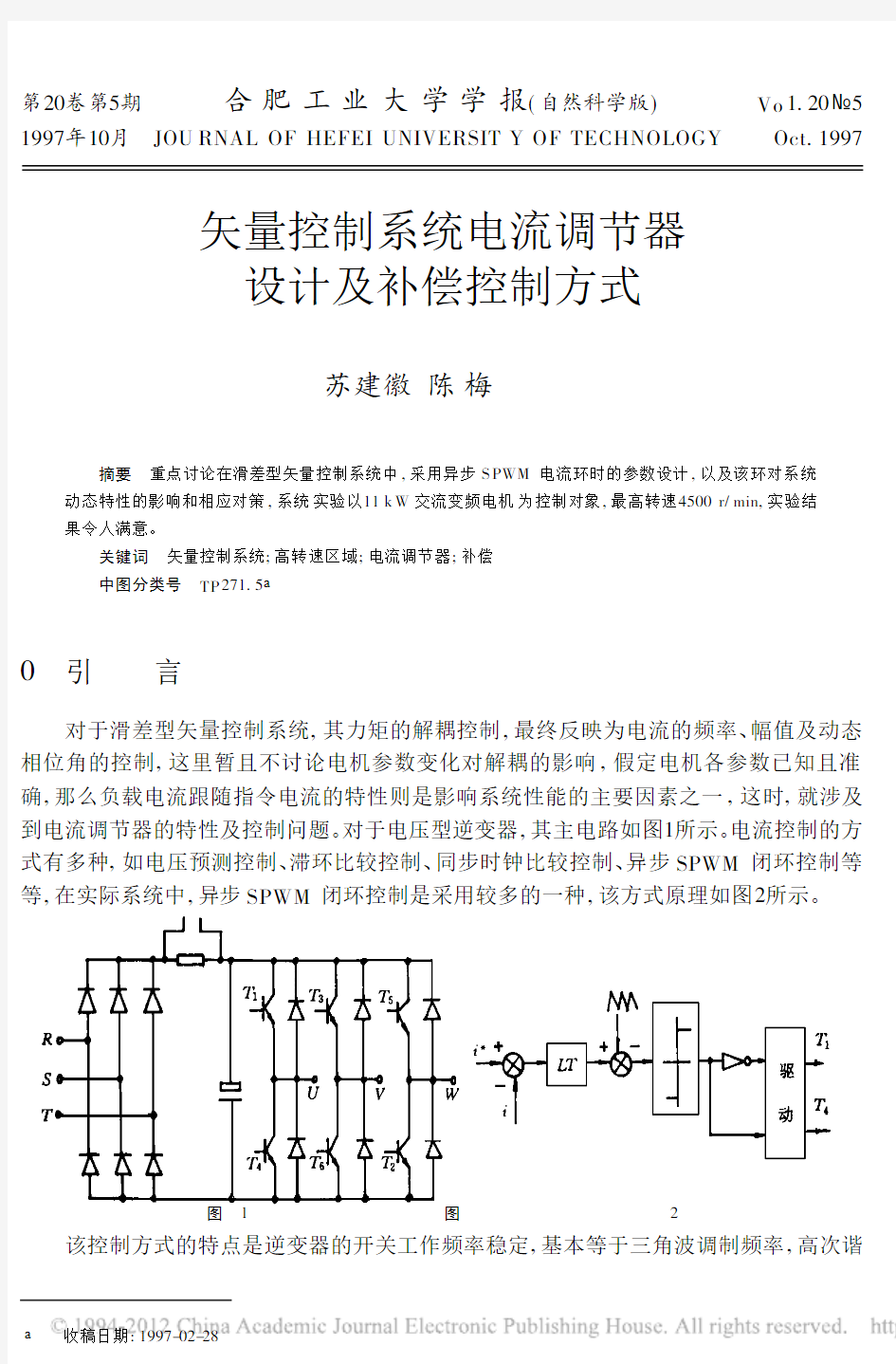
对于滑差型矢量控制系统,其力矩的解耦控制,最终反映为电流的频率、幅值及动态相位角的控制,这里暂且不讨论电机参数变化对解耦的影响,假定电机各参数已知且准确,那么负载电流跟随指令电流的特性则是影响系统性能的主要因素之一,这时,就涉及到电流调节器的特性及控制问题。对于电压型逆变器,其主电路如图1所示。电流控制的方式有多种,如电压预测控制、滞环比较控制、同步时钟比较控制、异步SPWM闭环控制等等,在实际系统中,异步SPWM闭环控制是采用较多的一种,该方式原理如图2所示。
图 1 图 2
该控制方式的特点是逆变器的开关工作频率稳定,基本等于三角波调制频率,高次谐a收稿日期:1997-02-28
波分量较小,噪音低,但给定电流与实际反馈电流有幅值和相位上的误差,这种误差随频率而变化。在频率加减变化时,其动态跟随特性还具有特殊性,如果系统设计能根据其特点,把电机定子电流误差控制在一定范围内,就不会对系统的稳定性及快速性造成明显的影响。
1 电流调节器的设计
由文献[2],可以得到图3所示的突出转子磁链用旋转向量表示的瞬态等值电路,其中
Q =1-L 2m /(L S ?L 1),U a 1为定子电压旋转向量。该等值电路的特点是中间磁链不是气隙
磁链,而是L m /L r 倍的转子磁链,竖臂右边电路不含电感项,电流幅值为L r /L m 倍的转子电流,图3有助于进一步理解矢量控制原理。
由图3,可得如下方程
U 1(S )=(r 1+S L S Q )I 1(S )+I ′o (S )S L 2m /L r
则
(1S (L 2m /L r ))U 1(S )=r 1+SL S Q S (L 2m /L r )
?I 1(S )+I ′o (S ) 根据图2电流环节结构,可以得到其传递函数结构图4
。
图 3 图 4
其中K f /(T f S +1)为电流检测与滤波环节传递函数,G c (S )为电流调节器传递函数,K p e -S p S 为PWM 逆变器传递函数。
电压型PWM 逆变器纯滞后时间很短,可将其传递函数近似表示为K p /(T Q S +1),,这里K p =V ac /2A t ,A t 为三角波幅值,V dc 为整流电压。
在矢量控制系统的动态过程中,可以认为电机的转子磁链基本保持不变,因此,在电流调节器的设计时,可不考虑I ′o (S )的影响,得简化传递函数,如图5
所示。
图 5 图 6
由于滤波环节和PWM 逆变时间常数,相对于定子等效时间常数T S =L S Q /r 1小得多,因此,可将这两个惯性环节等效为K f K p /(T 6S +1)。这样,可得简化传递函数如图6107第5期 苏建徽等:矢量控制系统电流调节器设计及补偿控制方式
所示。
对于滑差型矢量控制系统,要求电流快速跟踪性好,抗干扰强。因此,可将电流环按典型Ⅱ型系统设计,将1/(T S S+1)近似作为积分环节1/(T S S)处理,令G c(S)=K c(T c S) +1/(T c S),得电流环开环传递函数如下
W K(S)=K c(T c S+1)
r1T S T c S2
?
K Q K f
T′6S+1
=K
T c S+1
S2(T6S+1)
这里
K=K c K Q K f r1T S T c S2
令 T c=hT6
K=h+1 2h2T26
则得调节器参数如下
T c=hT6
K c=h+1
2h
?r1T S
K Q K f T6
由此,可得电流环闭环传递函数
I1(S) I*1(S)=
K f K Q G c(S)
K Q K f G c(S)+r1(T6S+1)(T S S+1)
将调节器参数代入得
I1(S) I*1(S)=
K f K c K p(T c S+1)
K c K p K f(T c S+1)+r1(T6S+1)(T S S+1)T c S
忽略高次项,并取等效一阶惯性环节的时间常数为传递函数分母与分子时间常数之差,得
I1(S) I*1(S)=
T c S+1
(T c+
r1T c
K c K p K f)S+1
≈1
r1T c
K c K p K f S+1
≈1
T L S+1
其中 T L=
r1T c K c K p K f
2 电流环的特性分析
由上述设计可知,电流调节器的参数设计方式完全与直流调节器中电流环设计方式相同,而本系统是交流调速系统,因此,在跟随特性上不可避免地存在差异。对于低速区域,正弦指令电流频率低,因此,电流环有较高的放大倍数,两者差异不大。但在高速区域,由于电流环开环放大倍数严重下降,指令电流与反馈电流误差增大,则矢量控制系统的解耦性受到破坏,系统就会发生振荡不稳定,这在系统的动态响应过程中表现尤为明显。该电流环不仅仅在幅值上影响系统在高速区域的性能,在相位上的动态影响也是很特殊的。由于电流环本身是一个惯性环节,而系统在加、减速过程,其指令电流的变化类似于扫频仪输出特性,加速时,指令频率是快速连续增加,减速时,则相反。因此,在加速时,其反馈108 合肥工业大学学报(自然科学版) 1997年第20卷(5)
电流由于不断在相位上滞后指令电流,在一定的累计时间内,会发生幅值上的低频振荡,类似于拍频现象,这样必定会影响此时力矩的输出,减速时,则恰好相反,反馈电流幅值会超过指令电流。所以,在不同转速区域及动态过程中,如果不考虑电流环幅值、相位上变化的特殊性,而直接按矢量控制原理计算的指令值输出,则在高速段,系统控制性能会出现问题。
3 电流环的补偿控制方式
由以上分析,并根据滑差型矢量控制原理,构成系统控制原理框图如图7所示。由图7控制原理可知,电流幅值指令的补偿计算,由转矩电流极性和转速极性、区段所决定。由于电机在加、减速动态过程中,电流调节器表现不同的跟踪特性,因此,电流幅值的补偿算法应针对电机这两种状态有所不同,电机所处状态的判断,由转矩指令电流的极性和转速极性决定,当电机处于正反向电动状态时,转矩指令电流极性与转速极性相同,当电机处于正反向制动状态时,
转矩指令电流极性与转速极性相反。
图 7
在高速区段,当电机处于电动或制动不同状态时,滑差X *S 的计算也有所区别,否则,会导致系统的不稳定或动态响应慢。在高速区段的制动状态,逆变器直流侧会产生泵升电压,因此,电机恒转矩制动区可以扩大,以提高制动速度。
系统实验对象为11kW 交流异步机,参数如下:
U e =200V I e =49A I 0=32.5A
n e =1500r/min
n max =4500r/m in x m =10.638R 1=0.1748
x 1=0.268G 2D =0.36kg m
2r 12=0.1568x ′2=0.2688图8~图10分别为在不同转速区段电机空载起制动时,转速和电流指令波形,电流指令和电流反馈波形,时标为500ms/格。
109第5期 苏建徽等:矢量控制系统电流调节器设计及补偿控制方式
110 合肥工业大学学报(自然科学版) 1997年第20卷(5)
(a) (b)
图8 最高转速1500r/min
(a) (b)
图9 最高转速3000r/
min
(a) (b)
图10 最高转速4500r/min
参考文献
1 刘竞成.交流调速系统.上海交通大学出版社,1984
2 胡星斗.感应电机瞬态等值电路.电气自动化,1986(3)
3 陈伯时.电力拖动自动控制系统.北京:机械工业出版社,1992
DESIGN OF CURREN T REGULAT OR A ND COM PENSATIONAL CONT ROL M ET HOD FOR THE V ECT OR-CONT ROLED SYSTEM
S u J anhui Chen Mei
Abstract In this paper,the focus o f disscussio n is o n parameter selection for SP-WM current lo op and its effects to the dynamic characteristics of the sy stem ,and adptio n metho d .T he po wer of induction mo to r w as 11kW .T ts hig hest speed is 4500r /min .T he result of the experiment is satisfy ing .
Key Words vecto r-control system ,high speed area ,current regulator,compensa-tio
n
姓名 苏建徽 出生于 1963 年 2 月 学位 硕士
职称 助理研究员
主要研究方向 交流变频调速
联系地址 合肥工业大学自动化研究所 邮编 230009
(本文责任编辑涂捷)111第5期 苏建徽等:矢量控制系统电流调节器设计及补偿控制方式
基于空间矢量控制(SVPWM)技术的三相电压型整流器设计
基于空间矢量控制(SVPWM)技术的三相电压型整流器设计 作者:佚名来源:本站整理发布时间:2010-9-9 10:54:01 [收藏] [评论] 传统的变压整流器和非线性负载的大量使用使电网中电流谐波含量较高,对飞机供电系统和供电质量造成很大影响。消除电网谐波污染、提高整流器的功率因数是电力电子领域研究的热点。空间矢量PWM(SVPWM)控制具有直流侧电压利用率高、动态响应快和易于数字化实现的特点。本文采用空间矢量技术对三相电压型整流器进行研究,使其网侧电压与电流同相位,从而实现高功率因数整流。 1 空间矢量控制技术 SVPWM控制技术通过控制不同开关状态的组合,将空间电压矢量V控制为按设定的参数做圆形旋转。对任意给定的空间电压矢量V均可由这8条空间矢量来合成,如图1所示。任意扇形区域的电压矢量V均可由组成这个区域的2个相邻的非零矢量和零矢量在时间上的不同组合来得到。这几个矢量的作用时间可以一次施加,也可以在一个采样周期内分多次施加。也就是说,SVPWM通过控制各个基本空间电压矢量的作用时间,最终形成等幅不等宽的PWM脉冲波,使电压空间矢量接近按圆轨迹旋转。主电路功率开关 管的开关频率越高,就越逼近圆形旋转磁场。 为了减少开关次数,降低开关损耗,对于三相VSR某一给定的空间电压矢量 ,采用图2所示的合成方法。在扇区I中相应开关函数如图3所示。零矢量均匀地分布在矢量
的起、终点上,除零矢量外, 由V1、V2、V4合成,且中点截出2个三角形。一个开关周期中,VSR上桥臂功率开关管共开关4次,由于开关函数波形对称,谐波主要集中在整数倍的开关频率上。 2 直接电流控制策略 三相VSR的电流控制策略主要分为直接电流控制和间接电流控制。直接电流控制采用网侧电流闭环控制,提高了网侧电流的动、静态性能,并增强电流控制系统的鲁棒性。而在直接控制策略中固定开关频率的PWM电流控制因其算法简单、实现较为方便,得到了较好应用,在三相静止坐标系中,固定开关频率的PWM电流控制电流内环的稳态电流指令是一个正弦波信号,其电流指令的幅值信号来源于直流电压调节器的输出,频率和相位信号来源于电网;PI电流调节器不能实现电流无静差控制,且对有功电流和无功电流的独立控制很难实现。在两相同步旋转坐标系(d,q)中的电流指令为直流时不变信号,且其PI电流调节 器实现电流无静差控制,也有利于分别对有功电流 和无功电流 独立进行控制。 3 三相VSR数字控制系统 三相VSR数字控制系统结构如图4所示,控制系统采用电压外环和两个电流内环组成双环控制结构,电压环控制三相VSR直流侧电压,通过输出直流侧电压Vdc与给定参考电压 差值经过PI调节产生电流参考信号
电流调节器设计举例
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电得双闭环直流调速系统,整流装置采用三相桥式电路,基本 数据如下: 直流电动机: 220V、136A、 1460r /min, Ce=0、132V﹒min/r,允许过载倍数λ=1、5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0、5 时间常数 电流反馈系数β=0、062V/A(β≈10V/1.5I N) 试按工程方法设计电流调节器,设计要求如下 要求稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统结构图如下
双闭环直流调速系统电流环得设计 1.确定时间常数 (1)整流装置滞后时间常数Ts 。 -I dL U d0 U n + - - + - U i ACR 1/R T l s+1 R T m s U *i U c K s T s s+1 I d 1 C e + E β T 0i s+1 1 T 0i s+1 ASR 1 T 0n s+1 α T 0n s+1 U *n n
三相桥式电路得平均失控时间Ts=0、0017s。 (2)电流滤波时间常数 三相桥式电路每个波头得时间就是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因此取=2ms=0、002s。 (3)电流环小时间常数;按小时间常数近似处理,取=0、0037s。 2.选择电流调节器结构 根据设计要求:5%,而且 因此可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选择电流调节器参数 ACR超前时间常数:== 0、03s。 电流环开环增益:要求5%时,应取
=0、5因此 于就是,ACR得比例系数为 4.校验近似条件 电流环截止频率s-1 (1)晶闸管装置传递函数近似条件 ﹤ 现在 = s-1> 满足近似条件 (2)忽略反电动势对电流环影响得条件:; 现在, = 满足近似条件。 (3)小时间常数近似处理条件: =
同步时序电路的设计步骤
同步时序电路的设计步骤 同步时序电路的设计步骤 同步时序电路的分析是根据给定的时序逻辑电路,求出能反映该电路功能的状态图。状态图清楚地表明了电路在不同的输入、输出原状态时,在时钟作用下次态状态的变化情况。同步时序电路的设计的设计是分析的反过程,其是根据给定的状态图或通过对设计要求的分析得到的状态图,设计出同步时序电路的过程。 这里主要讨论给定状态图的情况下的同步时序电路的设计,对于具体的要求得到状态图的过程一般是一个较复杂的问题,这是暂不讲。根据已知状态图设计同步时序电路的过程一般分为以下几步: 1.确定触发器的个数。首先根据状态的个数来确定所需要触发器的个数,如给定的状态个数为n,由应满足 n≤2K,K为实现这来状态所需要的触发器的个数。(实际使用时可能给定的状态中存在冗余项,这时一般还须对状态进行化简。) 2.列出状态转移真值表。根据状态列出状态转移真值表,也称状态表、状态转移表。 3.触发器选型。选择合适的触发器,通常可选的触发器有:JK-FF,D-FF,T-FF,一般使用较广的为JK-FF。根据状态图和给出的触发器的型号写出其输入方程,通常在写输入方程时须对其进行化简,以使电路更简单。 4.求出输出方程。根据状态表,求出输出逻辑函数Z的输出方程,还过有些电路没有独立的输出,这一步就省了。 5.画出逻辑图。根据输入方程、输出方程画出逻辑电路图。 6.讨论设计的电路能否自启动。在设计的电路中可能出现一些无关的状态,这些状态能否经过若干个时钟脉冲后进行有效的状态。 同步时序电路设计举例 例按下图状态图设计同步时序电路。 1.根据状态数确定触发器的数目:由状态图可以看出,其每个状态由两个状态,故可用两个触发器。其变量可 用Q 1,Q 表示; 2.根据状态图列出状态表:状态表的自变量为输入变量x和触发器当前状态Q 1 n,Q n,而应变量为触发器的次态 Q 1n+1Q n+1、及输出z,列表时将自变量的所有组合全部列出来,其中当Q 1 n Q n=01的状态为不出现,其输出可看作任意 项处理。
5.2 闭环电子控制系统的设计与应用(1)
如图所示是JN6201集成电路鸡蛋孵化温度控制器电路图,根据该原理图完成1~3题。 1.该电路图作为控制系统的控制(处理)部分是IC JN6201,当JN6201集成输出9脚长时间处于高电平,三极管V2处于截止状态,继电器释放,电热丝通电加热。 2.安装好调试时,先将温度传感器Rt1放入37℃水中,调整电位器Rp1,使继电器触点J-2吸合,再将温度传感器Rt2放入39℃水中,调整Rp2,使继电器触点J-2释放。 3.调试时发现,不管电位器Rp1和Rp2怎么调,继电器J 始终吸合,检查电路元器件安装和接线都正确,用万用表测三极管V2集电极电位,在不同的调试状态分别为2.8V 和0V ,可知电路发生故障的原因是( B ) A.二极管V6内部断路 B.三极管V3内部击穿(短路) C.电阻R4与三极管V3基极虚焊 D.继电器线圈内部短路 如图所示是运算放大器鸡蛋孵化温度控制器电路图,根据该原理完成4~6题。 4.该电路作为控制系统的输出部分是继电器J 、电热丝等,当电路中集成运放2脚的电位低于3脚的电位,三极管V3处于饱和状态,继电器J 吸合,电热丝通电加热。 上限 V2饱和导通时候Uce 电压降0.2V ,所以留下来给集电极2.8V ,截止时候0V
5.安装好后调试时,将温度传感器Rt 放入39℃水中,调R4,使电压U2=U3,集成运放输出端6脚的电压为0V ,电路实现39℃单点温度控制。 6.调试时发现,将温度传感器Rt 放入高于39℃水中,继电器吸合;将温度传感器Rt 放入低于39℃水中,继电器释放,出现该故障现象的原因可能是( A ) A.集成运放2脚与3脚接反 B.二极管V4接反 C.电阻R2断路 D.三极管V3损坏 如图所示是晶体管组成的水箱闭环电子控制系统电路,根据该原理图完成7~9题。 7.该电路作为控制系统被控对象的是水箱内的水,水箱的水位从a 点降到b 点的过程中,三极管V1处于饱和状态,三极管V2处于截止状态,继电器触点J-1处于吸合状态。 8.安装调试时,将三个水位探头按图中的高低放入空玻璃杯中,如果电路正常,电路通电后,继电器J 吸合;向玻璃杯中加水,到达a 点时,继电器J 释放;接着将玻璃杯中的水排出,水位降到b 点以上时,继电器J 释放;水位降到b 点以下时,继电器J 吸合。 9.调试时发现,玻璃杯中的水位在b 点以下时,继电器J 就吸合;水位加到b 点,继电器J 就释放。出现该故障现象的原因是( D ) A.继电器J 没用 B.三极管V1损坏 C.二极管V3接反 D.电路没接J-1触点,b 点直接接到了电阻R1 如图所示是555集成电路组成的水箱水位闭环电子控制系统电路图, (第4~6题) (第7~9题) R4 10k ?R5 4.7k R3 4.7k
电流调节器设计举例样本
双闭环直流调速系统设计举例 例题2-1:某晶闸管供电双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 直流电动机: 220V、136A、1460r/min,Ce=0.132V﹒min/r,容许过载倍数λ=1.5。 晶闸管装置放大系数Ks =40。 电枢回路总电阻R=0.5 时间常数 电流反馈系数β=0.062V/A(β≈10V/1.5I N) 试按工程办法设计电流调节器,设计规定如下 规定稳态指标:电流无静差; 动态指标:电流超调量<5%。 双闭环直流调速系统构造图如下
双闭环直流调速系统电流环设计 1.拟定期间常数 (1)整流装置滞后时间常数Ts 。 三相桥式电路平均失控时间 T s =0.0017s 。 -I dL U U + - - + - U ACR 1/R T s+1 R T s U * U K T s+1 I 1 + E β T s+1 1 T s+1 ASR 1 T s+1 α T s+1 U * n
(2)电流滤波时间常数 三相桥式电路每个波头时间是3.33ms,为了基本滤平波头,应有(l~2)=3.33ms, 因而取=2ms=0.002s。 (3)电流环小时间常数;按小时间常数近似解决,取=0.0037s。2.选取电流调节器构造 依照设计规定:5%,并且 因而可按典型1型系统设计。电流调节器选用PI型,其传递函数为 3.选取电流调节器参数
ACR超前时间常数:== 0.03s。电流环开环增益:规定5%时,应取=0.5因而 于是,ACR比例系数为 4.校验近似条件 电流环截止频率s-1(1)晶闸管装置传递函数近似条件﹤ 当前= s-1> 满足近似条件
控制系统设计作业(DOC)
第一题:现控有哪些控制器结构,各有何特点,作用,用在什么场合? 答: (1)状态反馈: 特点:1、状态反馈将系统的每个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入;2、不增加系统的维数(状态反馈解耦时也不增加系统的维数);3、比不增加补偿器的输入反馈的效果要好;4、不增加新的状态变量;5、反馈增益阵是常矩阵,反馈为线性反馈;6、不改变受控系统的能控性,但不保证系统的能观性不变;7、对于完全能控的单输入系统能实现闭环极点的任意配置,而且不影响原系统零点的分布,但如果故意制造零极点对消,那么此时闭环系统将是不能观的;8、系统能镇定的充要条件是不能控子系统为渐近稳定。 作用:状态反馈增益阵K的引入不增加系统的维数,但可通过K的选择自由地改变闭环系统的特征值,从而是系统获得所要求的性能。 场合: (2)输出反馈: 特点:1、采用输出矢量y构成线性反馈律;2、在技术实现上的方便性;3、输入反馈的HC和状态反馈的K相当,由于m 第2章 转速、电流双闭环直流调速系统 和调节器的工程设计方法 2.1 转速、电流双闭环直流调速系统及其静特性 采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。 在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。这样的理想起动过程波形示于图2-1b 。 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。 2.1.1 转速、电流双闭环直流调速系统的组成 系统中设置两个调节器,分别调节转速和电流,如图2-2所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。这就形成了转速、电流双闭环调速系统。 转速和电流两个调节器一般都采用PI 调节器,图2-3。两个调节器的输出都是带限幅 + TG n ASR ACR U *n + - U n U i U * i + - U c TA M + - U d I d UPE - M T 图2-2 转速、电流双闭环直流调速系统结构 ASR —转速调节器 ACR —电流调节器 TG —测速发电机 TA —电流互感器 UPE —电力电子变换器 内外 n i 变频器的V/F控制与矢量控制 U/f=C的正弦脉宽调制(SPWM)控制方式其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。 一、矢量控制(VC)方式 矢量控制变频调速的做法是将异步电动机在三相坐标系下的定子电流Ia、Ib、Ic、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流Im1、It1(Im1相当于直流电动机的励磁电流;It1相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。其实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。矢量控制方法的提出具有划时代的意义。然而在实际应用中,由于转子磁链难以准确观测,系统特性受电动机参数的影响较大,且在等效直流电动机控制过程中所用矢量旋转变换较复杂,使得实际的控制效果难以达到理想分析的结果。 V/F控制与矢量都是恒转矩控制。U/F相对转矩可能变化大一些。而矢量是根据需要的转矩来调节的,相对不好控制一些。对普通用途。两者一样 1、矢量控制方式—— 矢量控制,最简单的说,就是将交流电机调速通过一系列等效变换,等效成直流电机的调速特性,就这么简单,至于深入了解,那就得深入了解变频器的数学模型,电机学等学科。 矢量控制原理是模仿直流电动机的控制原理,根据异步电动机的动态数学模型,利用一系列坐标变换把定子电流矢量分解为励磁分量和转矩分量,对电机的转矩电流分量和励磁分量分别进行控制。 在转子磁场定向后实现磁场和转矩的解耦,从而达到控制异步电动机转矩的目的,使异步电机得到接近他励直流电机的控制性能。 具体做法是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。 2、V/F控制方式—— V/F控制,就是变频器输出频率与输出电压的比值为恒定值或成比例。例如,50HZ时输出电压为380V的话,则25HZ时输出电压为190V。 变频器采用V/F控制方式时,对电机参数依赖不大,V/f控制是为了得到理想的转矩-速度特性,基于在改变电源频率进行调速的同时,又要保证电动机的磁通不变的思想而提出的,通用型变频器基本上都采用这种控制方式。V/f控制变频器结构非常简单,但是这种变频器采用开环控制方式,不能达到较高的控制 第十六单元时序逻辑电路 (8学时——第49~56学时) 主要容:时序逻辑电路的分析与设计 教学重点:时序逻辑电路的分析与设计方法 教学难点:时序逻辑电路的设计 教学方法:启发式教学、探究式教学 教学手段:实验、理论、实际应用相结合 第一部分知识点 一、时序电路概述 时序电路的状态及输出是与时间顺序有关的,由组合电路和存储电路(多为触发器)组成,1、特点 任意时刻的输出,不仅与该时刻的输入有关、还与电路原来的状态有关。 2、分类 按逻辑功能分为计数器、寄存器等,按触发器工作分为同步电路和异步电路,按电路输出信号特性分为Mealy型(输出与输入及电路现态有关)和Moore型(输出仅与电路现态有关)电路。 二、时序电路的分析 1、分析步骤 (1)写出电路的时钟方程(各触发器的CP表达式)、输出方程(各输出端表达式)及驱动方程(各触发器的触发信号表达式)。 (2)求出电路的状态方程(各触发器的状态表达式) (3)计算得出电路工作状态表 (4)画状态图及时序图 (5)分析电路功能 2、分析举例 分析时序电路 (1)时钟方程CP0=CP1=CP2=CP 输出方程n n n Q Q Q Y 1 2 = 驱动方程n Q J 2 =、n Q K 2 =,n Q J 1 =、n Q K 1 =,n Q J 1 2 =、n Q K 1 2 =(2)状态方程 将J、K代入JK触发器特征方程n n n Q K Q J Q+ = +1得各触发器状态方程: n n Q Q 2 1 = +、n n Q Q 1 1 = +、n n Q Q 1 1 2 = + (3)计算得到状态表 现态次态输出 n Q 2 n Q 1 n Q 1 2 | n Q+1 1 + n Q1 + n Q Y 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 1 0 0 0 0 1 0 1 0 0 1 1 0 1 1 1 1 1 1 1 (4)画状态图及时序图 (5)逻辑功能 这是一个有六个工作状态的同步工作电路,属Moore型电路。 (6)有效态和无效态 摘要 本文主要介绍低压无功补偿装置的基本原理、控制方案以及硬件方面的选型和设计。 该补偿系统采用TI公司的定点TMS320LF2812系列DSP和MCU的双控制器进行控制,TMS320LF2812为补偿装置的总控制器,具有自动采样计算、无功自动调节、故障保护、数据存储等功能。同时具备指令运算速度快(约100MIP)、运算量大的优点,同时MCU与外部设备进行通讯,互不干扰,更好的满足了实时性和精确性的要求。采用晶闸管控制投切电容器、数字液晶实时显示系统补偿情况,可以实现快速、无弧、无冲击的电容器投切。为了更详细的介绍该系统,在论文第四章设计了比较完整的各功能模块的硬件电路图,其中包括电源模块、信号变换及调理模块、AD采样模块、锁相同步采样模块、通讯模块等。 关键字:低压无功补偿;晶闸管投切电容器;DSP Abstract This paper mainly introduces the basic principle of low-voltage reactive power compensation device, control scheme and hardware selection and design. The compensation system by TI company's fixed-point tms320lf2812 series DSP and MCU dual controller control, tms320lf2812 compensation device controller with automatic sample calculation, automatic reactive power regulation, fault protection, data storage and other functions. At the same time with the instruction operation speed (about 100MIP), the advantages of large amount of computation. At the same time, MCU and peripheral equipment 基于PWM控制的交流发电机电压调节器 摘要:本文介绍了基于SG3525 PWM控制器的交流发电机电压调节器的硬件电 路。较为详细地分析了通过检测交流发电机的输出平均电压来改变输出PWM波 的占空比,进而控制电机励磁绕组产生合适的励磁电流来使输出电压稳定于规定 的水平。 关键词:电压调节器;PWM Alternator voltage regulator based on the PWM Controller Abstracts:This article introduces the design of hardware of the alternator voltage regulator system based on the SG3525 PWM controller for synchronous machines. Detailed analysis of how to change the average duty cycle of the PWM wave by detecting the average output voltage of the alternator, and thus control the motor field winding to generating the appropriate excitation current,so that the output voltage is stabilized at the required level. Key words: Voltage regulator; PWM 前言: 电压调节电路是航空发电机Array的重要组成部分。其基本组成有 电压检测、比较、放大与执行和 控制几个环节,如图1所示。本 文的交流发电机调压系统是以 SG3525芯片为核心的。交流发电 机的输出平均电压经电压采样电 路反馈到SG3525的1脚,即误差 放大器的反相端。当输出电压有 波动时,误差放大器会放大误差, 后续电路将会自动调节其输出 图1 电压调节器方块图 PWM波的占空比,进而使功率驱 动电路的输出波形的导通时间改变,从而调节了发电机的励磁电流,使其输出电压回复为正常值。 1 输出电压检测电路 本调节器输出电压的检测采用 平均电压检测,如图2所示。电压 Ud由三相电压经变压整流后取得, 其平均值取决于三个线电压的大 小。 图2 平均电压检测电路 实验九Moore型同步时序逻辑电路的分析与设计 22920132203686 薛清文周2下午实验 一.实验目的: 1.同步时序逻辑电路的分析与设计方法 2.D,JK触发器的特性机器检测方法。 2.掌握时序逻辑电路的测试方法。 3.了解时序电路自启动设计方法。 4.了解同步时序电路状态编码对电路优化作用。 二.实验原理: 二、 1.Moore同步时序逻辑电路的分析方法: 时序逻辑电路的分析,按照电路图(逻辑图),选择芯片,根据芯片管脚,在逻辑图上标明管脚号;搭接电路后,根据电路要求输入时钟信号(单脉冲信号或连续脉冲信号),求出电路的状态转换图或时序图(工作波形),从中分析出电路的功能。 2.Moore同步时序逻辑电路的设计方法: (1)分析题意,求出状态转换图。 (2)状态分析化简:确定等价状态,电路中的等价状态可合并为一个状态。(3)重新确定电路状态数N,求出触发器数n,触发器数按下列公式求:2n-1 针对异步电机,为了保证电机磁通和出力不变(转矩不变),电机改变频率时,需维持电压V和频率F的比率近似不变,所以这种方式称为恒压频比(VF)控制。VF控制-控制简单,通用性强,经济性好,用于速度精度要求不十分严格或负载变动较小的场合。从本质上讲,VF控制实际上控制的是三相交流电的电压大小和频率大小,然而交流电有三要素,就是除了电压大小和频率之外,还存在相位。VF 控制没有对电压的相位进行控制,这就导致在瞬态变化过程中,例如突加负载的时候,电机转速受冲击会变慢,但是电机供电频率也就是同步速还是保持不变,这样异步电机会产生瞬时失步,从而引起转矩和转速振荡,经过一段时间后在一个更大转差下保持平衡。这个瞬时过程中没有对相位进行控制,所以恢复过程较慢,而且电机转速会随负载变化,这就是所谓VF控制精度不高和响应较慢的原因。 矢量控制国外也叫磁场定向控制,其实质是在三相交流电的电压大小和频率大小控制的基础上,还加上了相位控制,这个相位在具体操作中体现为一个角度,简单的讲就是电机定子电流相对于转子的位置角。 综上,我觉得矢量控制和VF控制的最本质的区别就是加入了电压相位控制上。从操作层面上看,矢量控制一般把电流分解成转矩电流和励磁电流,这里转矩电流和励磁电流的比例就是由转子位置角度(也就是定子电压相位)决定的,这时转矩电流和励磁电流共同产生的转矩是最佳。宏观上看,矢量控制和VF控制的电压,电流,频率在电机稳定运行时相差不大,都是三相对称交流,基本上都满足压频比关系,只是在瞬态过程如突加、突减负载的情况下,矢量控制会随着速度的变化自动调整所加电压、频率的大小和相位,使这个瞬时过程更快恢复平衡。 变频器采用V/F控制方式时,对电机参数依赖不大,一般强调“空载电流”的大小。变频器作矢量控制时,对电机参数的依赖很大,所以必须对电机作旋转 《学术论文写作》课程论文 基于Arduino的一种电子显示屏控制 系统设计 姓名: 学院(系): 专业:自动化 班级: 学号: 基于arduino的一种简易电子显示屏设计 摘要:LED显示屏因其工作稳定可靠、寿命长、亮度高等优点,在许多场合中应用广泛。加强显示屏控制系统的可靠性研究意义重大。基于Arduino单片机,研究设计了一种新的电子显示屏控制系统。以PC机为上位机,向单片机发送显示代码和控制命令,单片机控制显示驱动模块驱动LED点阵显示屏进行扫描显示。PC机与单片机之间的通信采用ISP下载编程器来实现。利用按键模块通过单片机对显示屏的显示内容进行翻页和更新控制。 关键词:显示屏;可靠性;Arduino;控制 The Design of Electronic Display Control System based on Arduino Abstract: LED displays is widely used in many occasions because of its a dvantages such as stable, reliable and long life. It is of great significance to strengthen the research of the reliability of electronic display control system. Here introduces a new kind of el ectronic display control system based on Arduino microcontroller. System uses PC as uppe r computer.PC send control commands and display code it has stored to the Arduino microcontr oller. And arduino microcontroller receives and deals with control command and display cod e which are from PC. Then drives scan display o f the display screen. Communication betwee n PC and the microcomputer can be implemented by using ISP download programmer. At last, page and update the content which is displayed of the billboard by using the key module an d all is based on th e single chip microcomputer. Keywords: electronic display; reliability; Arduino microcontroller 1.系统整体设计 本系统硬件的设计采用模块化设计,既能满足模块本身功能又要能够和整个系统兼容,如图1.1所示。系统硬件由Arduino控制系统,显示扫描电路,显示屏,键盘扫描电路及数据传输部分以及上位机六部分组成。上位机通过数据传输部分向MCU系统发送显示代码和控制命令,MCU系统执行显示命令并将显示代码处理后控制显示部分的显示内容和显示方式。 电流环PID 调节器设计大致流程 以下设计过程主要参考文献[1],首先给出永磁同步电机参数表如下: 电机的反电势会使电流输出与给定存在偏差,但低速时反电势较小,可通过调节器的控制消除, 因此设计时可忽略不计。电流环传函结构图如图1所示,其中,v K 是逆变器电压放大倍数,表示逆变器直流侧电压与三角载波电压幅值之比,v τ是逆变器时间常数,与开关频率有关,s R 是电枢绕组电阻,q L 是交轴电感,β 是反馈系数, oi T 是反馈滤波时间常 数,ACR G 是电流调节器传递函数。 图1 未加校正时的电流环开环传函如下: (1)()(1)v iob v q s oi K G S L S R T S βτ= +++ (1) 式中: v τ、oi T 是小时间常数, 因此可将控制对象等效: ()[()1] v iob q s v oi K G L S R T S βτ=+++ (2) 电流调节器可选用 PI 调节器进行设计: 1p i ACR i K K S G K S += (3) 用 PI 调节器的零点来抵消控制对象的大时间常数极点, 如下: 11q p i s L K K S S R += + (4) 得到电流环的开环传递函数: [()1]*v ik i oi v s K G K S T S R βτ=++ (5) 系统要求电流环具有较快的响应速度, 同时超调又不可过大, 因此令: ()0.5v oi v i s K T K R βτ+= (6) 设定逆变器开关频率为f=18kHz ,于是逆变器时间常数155.6v us f τ==,将15.5dc v s U K U ==、0.6β=、 0.11ms oi T =和表1的电机参数代入到式(4)、式(6)中,得 6.5p K =,0.0022i K =。 加入 PI 调节器之前的系统开环幅相频率特性曲线如图2 所示, 系统明显不稳定; 加入 PI 调节器后得到的系统开环的幅相频率特性曲线如图 3 所示, 可见所设计的电流环是稳定的, 且有 45°左右的相角裕度。 图2 原系统幅相频率特性曲线 图3 补偿后电流环幅相频率特性曲线 参考文献: [1]刘军,敖然,韩海云,秦海鹏,朱德明.永磁同步电动机伺服系统电流环优化设计[J ]. 微特电机,2012,40(6):17-20. [2]熊小娟,韩亚荣,邱鑫.永磁同步电机伺服系统电流环设计及性能分析[J ]. 科技传播,2010,5(上):62-63. [3]陈荣,邓智泉,严仰光.永磁同步服系统电流环的设计[J ]. 南京航空航天大学学报,2004,36(2):220-225. 时序逻辑电路分析例题 1、分析下图时序逻辑电路。 解: 1、列出驱动方程:111==K J 1//122Q A AQ K J +== 2、列出状态方程: 将驱动方程代入JK 触发器的特性方程Q K JQ Q //*+=得: /1*1Q Q = 212/1//21//2/1*2Q AQ Q Q A Q Q A Q AQ Q +++= 3、列出输出方程: 21//2/1Q Q A Q AQ Y += 4、列出状态转换表: (1)当A=1时: 根据:/1*1Q Q =;21/2/1*2Q Q Q Q Q +=;/2/1Q Q Y =得: (2)当A=0时: 根据:/1*1Q Q =;2/1/21*2 Q Q Q Q Q +=;21Q Q Y =得 : 5、画状态转换图: 6、说明电路实现的逻辑功能: 此电路就是一个可逆4进制(二位二进制)计数器,CLK 就是计数脉冲输入端,A 就是加减控制端,Y 就是进位与借位输出端。当控制输入端A 为低电平0时,对输入的脉冲进行加法计数,计满4个脉冲,Y 输出端输出一个高电平进位信号。当控制输入端A 为高电平1时,对输入的脉冲进行减法计数,计满4个脉冲,Y 输出端输出一个高电平借位信号。 2、如图所示时序逻辑电路,试写出驱动方程、状态方程,画出状态图,说明该电路的功能。 解:驱动方程 ?? ?=⊕=1010K Q X J n ???=⊕=11 1K Q X J n 状态方程 ()()n n n n n n n n n n n n n n Q XQ Q Q X Q Q X Q Q Q X Q Q X Q Q X Q 0 1 1 1 1 010110 11+=⊕=+=⊕=++ 1J 1K C1 1J 1K C1 1 Q 0 Q CP X Z =1 =1 =1 & FF 1 FF 0 1 1 电子智能门锁控制系统设计 发表时间:2019-08-26T16:01:50.360Z 来源:《城镇建设》2019年12期作者:叶健聪[导读] 随着电子智能化的日益发展,市场上出现了各种电子门锁,加强其控制系统的设计, 广东力维智能锁业有限公司广东佛山 528000 摘要:随着电子智能化的日益发展,市场上出现了各种电子门锁,加强其控制系统的设计,不仅能够为业主和用户带来便利,也能够进一步完善安防系统。本文通过对门锁控制系统的研究,希望能够为这方面的技术改进提供借鉴。关键词:电子门锁;门锁控制系统;控制系统设计1电子智能门锁控制系统的设计1.1硬件设计 1.1.1总体设计 1.1.1.1电子验证部分设计 在电子锁中,指纹锁占了这个家用类别的大概有70%以上,所以说到电子锁人们就会不约而同地想到指纹锁。对于指纹识别一般会分有光学式指纹识别与半导体指纹识别。光学指纹识别在生活中最常见的就是我们上班的考勤机,那种会发光的就是光学指纹识别,它的识别原理是通过CMOS采集头拍照的方式去识别指纹,价格稍微比较便宜,但被复制的机率稍大,安全性相对来说没有那么高,现在一般用在旧款色与低价的门锁上。半导体指纹识别主要是通过半导体指纹传感器利用电容、电场(也即我们所说的电感式)、温度、压力的原理实现指纹图像的采集。无论是电容式或是电感式,其原理类似,在一块集成有成千上万半导体器件的“平板”上,手指贴在其上与其构成了电容(电感)的另一面,由于手指平面凸凹不平,凸点处和凹点处接触平板的实际距离大小就不一样,形成的电容/电感数值也就不一样,设备根据这个原理将采集到不同的数值汇总,就完成了指纹的采集。半导体指纹识别指纹被复制的机率大大降低,可以防止假指纹,安全性对不光学指纹识别来说有了很大的提升,所以目前主流与高端的指纹锁都采用半导体指纹识别。当然指纹复制也不是那么容易的,正常情况下不是我们刻意用手指去倒模做一个指纹模板出来去识别的话,其他场合都是很难捕捉的,指纹算法会做对假指纹进行过滤,所以指纹识别验证方面目前来说还是比较安全可靠的。密码键盘有分传统的机械实体按键与电容式按键,为了锁看上去比较美观大气,目前市场上基本上都采用电容式触摸按键为主。门锁都设置了错误输入密码达到一定次数会报警并锁定键盘一定的时间,防止小偷通过试探密码开门。非接触式RF卡采用全球唯一的UID,门锁与卡片之间采用无线射频的同时方式,通信过程采用三重防碰撞加密认证,安全性高。 1.1.1.2电路控制部分设计 电路控制系统部分主要由单片机控制系统为主要核心。单片机控制系统类似于一台微信电脑,负责掌控于控制整个电子门锁的工作。由于电子门锁绝大部分都是使用电池供电的方式工作的,所以低功耗设计对于门锁来说是非常关键的。单片机负责控制各部分在不工作的时候进入低功耗休眠或者断电状态,以保持电池的续航能力。电子验证部分通过验证后发信号到单片机部分,单片机部分负责控制语音与灯光提示部分告诉用户验证结果,然后通过电机驱动电路控制电机转动以达到通过电子电路打开机械的方式实现开门。开门后单片机还要检测这个门锁是否已经打开,打开成功后,要重新把门锁上,以保证其他人不能尾随进去。同时单片机部分还包含显示单元,系统实时时钟单元,存储芯片单元等。显示单元采用OLED显示屏,负责人机交换界面的显示,验证开门时可以显示LOGO与ID号,同时在系统设置注册与登记的时候,显示菜单方便用户操作。实时时钟主要用于开门记录的时间,记录什么时间有人使用何种方式操作门锁,以便需要时进行查询。系统存储单元负责记录系统各种参数,系统登记的用户数量、密码、卡片ID、开门记录等都一一记录下来,存储器一般采用可读写,断电后仍能保留数据的储存芯片,实现在发生断电时,数据不丢失。门锁的单片机而且自带开门狗复位功能,在受到干扰时死机时可以实现自动重启,保证系统的正常工作。 1.1.1.3锁体控制部分设计。 锁体控制设计部分要保留原来机械钥匙与门内依然可以开启的方式,同时加入电子控制的方式也可以实现对门锁机械部分的开启。电子门锁保留了原来机械锁的传统部分,机械开启部分在任何时候都是可以实现开门的,以防电子部分出现故障时作为一个后备的开启方式。电子控制部分在收到信号后,驱动控制锁体的电机,联动锁体里面的机械部分,实现对门锁的开启。一些智能的锁体控制部分还包含检测锁体是否开启成功,电机转动是否到位,门是否有被卡住等。现在市场上锁体控制部分主流分2种,一种是半自动的,一种是全自动的。半自动的锁体主要是通过离合器的方式实现对锁体的控制,一般半自动的锁体都必须要带一个把手,在验证通过后,开门时需要转动把手开门。全自动锁体是模拟了拧钥匙的方式,通过电机的方式实现类似于钥匙转动的机械方式,直接把门锁打开,不需要拧动把手。半自动锁体是比较传统的电子锁体,经过已经市场多年的验证,全自动锁体属于比较新的技术,所以稳定性想对半自动锁体来说稍低,需要经过一段时间的磨合与调整。全自动去掉了转动把手的部分,对于门锁的设计外观上比较时尚,所以颇受用户的青睐,可能是成为以后市场的一种发展趋势。 1.2电子智能门锁身份识别系统硬件设计与开发1. 2.1系统硬件总体结构 智能锁设备的构造主要包括门锁控制芯片、身份识别模块(身份证识别模块、IC卡识别模块、密码按键识别模块)、电压适配模块、门锁电机驱动模块等。门锁控制芯片为STM32L051单片机系列低功耗处理器,休眠状态下电流为1微安,大大的提高电池的续航能力。身份识别模块包括身份证识别模块、IC卡识别模块和按键识别模块,身份识别模块把识别到的信息传送给门锁控制芯片,门锁控制芯片判断身份信息是否正确,然后向声音、灯光提醒模块和电机驱动模块发出相应控制信息。管理员通过密码按键模块管理用户身份信息,包括注册和注销用户来管理用户开门进入的权利。 1.2.2主控芯片系统电路 智能锁设备中,STM32L051单片机是门锁主控芯片,芯片所开发的程序控制着智能锁的工作,通过IIC和UART接口与外围部分通信,芯片接收、处理并识别身份识别模块传来的身份信息,然后控制声、光提示模块与用户互动,控制电机驱动模块开启门锁。 1.2.3电压适配模块传动教材第2章转速电流双闭环直流调速系统和调节器的工程设计方法
变频器的VF控制与矢量控制
单元15-时序逻辑电路
低压无功补偿系统硬件设计
电压调节器设计
Moore型同步时序逻辑电路的设计与分析
VF控制与矢量控制 瞬间弄懂
基于Arduino的一种电子显示屏控制系统设计剖析
电流环调节器设计过程
时序逻辑电路分析举例
电子智能门锁控制系统设计