人工智能-模糊控制全自动洗衣机 -
模糊控制全自动洗衣机
1.模糊控制简介
模糊控制是一种非线性的控制方法,主要针对那些无法取得数学模型或数学模型相当粗糙的系。首先要对被控对象按照人们的经验总结出模糊规则,采用模糊量,借助单片机对这些信息按照模糊规则转换为控制量,来完成自动控制。2.应用前景
近年来,模糊控制在家用电器控制中得到较广泛的应用,采用模糊控制的洗衣机,可具有自动识别衣质、衣量、脏污程度、脏污性质、自动决定水量、自动投入恰当的洗涤剂等功能,不仅实现了洗衣机的全面自动化,也大大提高了洗衣的质量。
3.基本原理
洗衣机的自动控制系统为一多输入多输出系统,输入量为衣质、衣量、脏污程度(即水的浑浊度)、脏污性质(浑浊度变化率);输出量为洗涤剂量、水位、水流、脱水时间、洗涤时间、漂洗方式等。从洗衣机的运行过程可以看出,洗涤剂量、水位、水流、脱水时间都可以通过输入量推理求得,而洗涤时间与漂洗方式为实时控制量,影响其主要因素是被洗物品的脏污程度,这两个量可以用水的浑浊度和浑浊度变化率来表示,油性脏污的浑浊度变化率小,泥性脏污的浑浊度变化率大。
4.模糊洗衣机的模糊推理
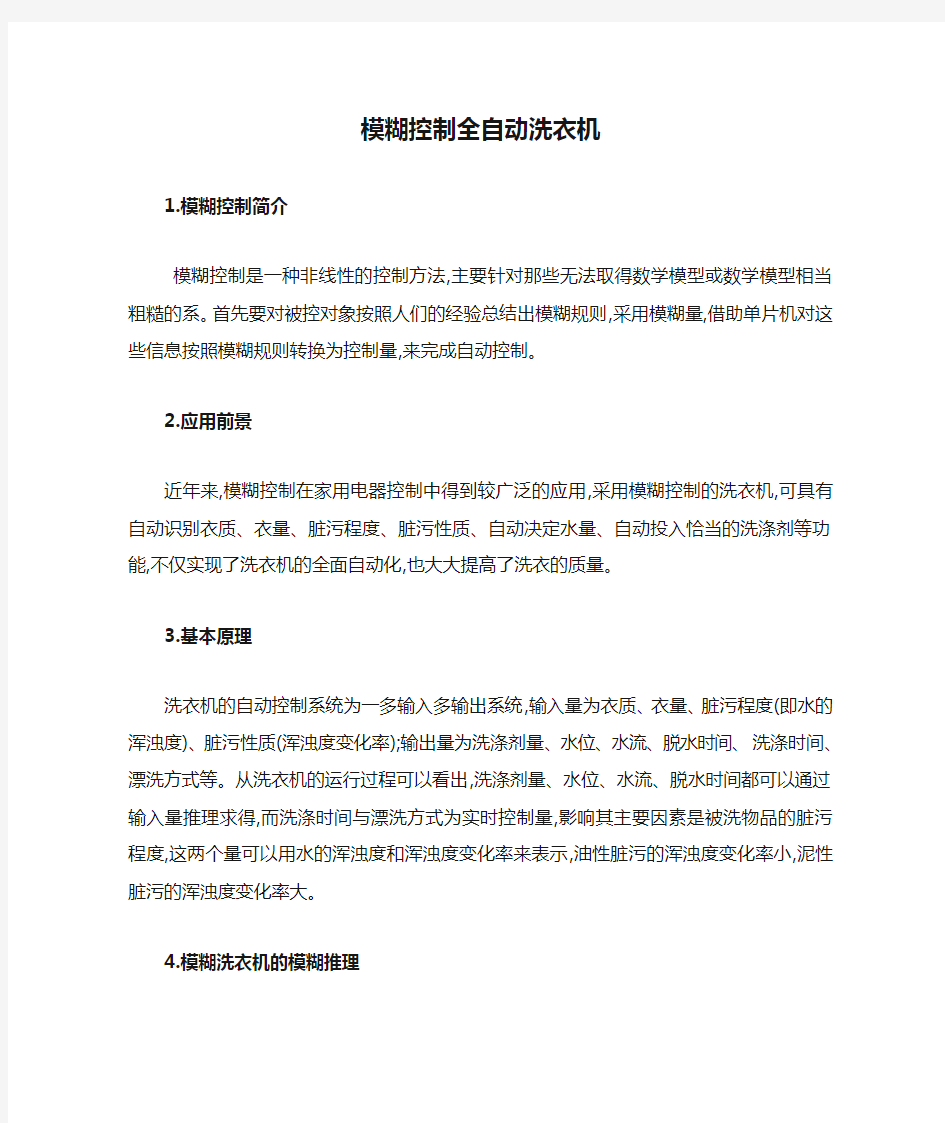
在模糊洗衣机中,浑浊度,布质,布量等都是通过对现行状态的检测,在通过模糊推理得出的.在模糊推理中,需要考虑推理的前件和后件,也就是推理的输入条件和输出结果.在模糊洗衣机中,主要是考虑布质,布量,水温和肮脏程度着几个条件,而从这些条件求取水位,洗涤时间和水流,漂洗方式和脱水时
间等.故而,模糊洗衣机的推理如图2所示。
图2模糊洗衣机的模糊推理
在模糊洗衣机中,布质和布量是无法通过物理传感器测出的;所以,它们的求取都是采用间接的方法.布质,布量和洗涤的过程有很大的关系.从一般人们的经验知道,布质是绵质,则洗涤会困难一些;布质如果是化学纤维,则困难会小一些.布量多一些,则洗涤过程要长一些,反之短一些.所以,除了肮脏度之外,模糊推理还考虑布质和布量.
从图2中可以看出,模糊洗衣机是一个多输入多输出的模糊推理和控制系统.在实际中,模糊推理的前件和后件之间的相关关系对于不同的因素而有所不同. 例如,肮脏程度和水温可以确定洗涤剂投放的量剂和洗涤时间,而布量、布质等可以确定水位和水流、脱水时间等。因此,在推理中把有关前件和后件进行处理。这种处理分成主要因素推理和顺序因素推理两种。通过这两种推理处理,不但使推理变得较为简单,而且可以在众多因素中清晰的区别出连锁关系的因素。
考虑到洗衣过程中的两种情况,一种是静态的,即洗涤剂浓度;另一种是动态的,即洗衣水流及时间。故而推理分两大部分,这也就是洗涤剂浓度推理和洗衣推理。
在洗涤剂浓度推理中,其规则如下:如果浑浊度高,则洗涤剂投入量大;如
果浑浊度偏高,则洗涤剂投入量偏大;如果浑浊度低,则洗涤剂投入量小;在洗衣推理中,推理规则如下:如果布量少,布质以化纤偏多,而且水温高;则水流为特弱,洗涤时间特短:如果布量多,布质以棉布偏多,而且水温低;则吧水流定义为特弱,洗涤时间定为特长;如果布量多,布质以棉布偏多,而且水温低;
则把水流定为特弱,洗涤时间定为特长;洗衣推理如表1所示:
表1洗衣机的模糊推理
他给出了洗衣机推理的所有规则。很明显这些规则的前见有三个因素,后件有两个因素。故它们也是一种多输入多输出的推理。对于输入量,即前件,各个因素的模糊量定义不同。布量的模糊量为多中少;水温的模糊量为高中低;而布质的模糊量为棉布偏多,棉布化纤各半,化纤偏多;而输出量,即后件中,水流的模糊量取特强,强,中,弱,特弱;时间的模糊量取特长,长,中,短,特短;在上述的模糊量中,各自的隶属函数都不同。水温,布质和时间的模糊量如图3所示。
图3水温、布量和时间的模糊量
在图3中,水温的模糊量是采用梯形隶属函数的;同样,布量的模糊量也是用梯形隶属函数;对于时间而言,其模糊量则是采用三角形隶属函数。在模糊推理中,模糊量的其范围选取起到很大的作用,而其形状所起的作用和范围相比就小的很多。不过,从模糊逻辑的角度讲,梯形隶属函数在推理中对特定的元素做得到的隶属度就会较多的机会为1或者较大;而三角形隶属函数的隶属度就会较小。
对于主要因素推理和顺序因素推理这两种推理,它们之间是有这隐含的推理关系的。主要因素推理是以采用人的思维中的主要因素起到决定作用原理执行的。在这种原理中,抛弃各种次要因素,以见米欧那个的形式产生因素少的推理规则,便于进行处理。顺序因素推理则是把前一种推理的结果作为本次推理的前件,从而推理出新的结果。在洗衣机中,如果考虑浑浊度,洗涤剂投入量,水流,
洗涤时间等因素的推理。作为主要因素推理显然有:
如果浑浊度搞,洗涤剂投入量大;而在表1中也看出另一种主要因素推理有:如果布量多,布质以棉布偏多;而且水温高;则水流为强,洗涤时间为中;
但实际上,洗涤投入量大时,要求洗涤时间较长才能较长才能洗的干净。故还需考虑顺序因素推理:如果洗涤剂投入量大,则洗涤时间长;如果洗涤剂投入量中,则洗涤时间中;
当顺序推理和主要因素推理推出的某一个后件因素的隶属度不同时,则采用Max 原则处理;而得到某个后件的模糊量不同时,则采用大者优先的原则处理。5.检测
(1)浑浊度的检测:义务的脏度,和洗净程度等都要需要检测,以便惊醒工作过程的整定和控制。浑浊度的检测是采用红外光电传感器来完成的。利用红外线在水中的透光率和时间的关系,通过模糊推理,以得出检测的结果,而这个结果就可以用于控制推理。
(2)布量和布质的检测:这个检测是在洗涤之前进行的。在水位为一定的时候,布量和布质的不同就会产生不同的布阻抗。通过给定一定的水位,然后在这个给定水位的条件下使主电机进行间断旋转,则不同布阻抗就会使主电机制动的性能不同,利用主电机在不同布阻抗时的制动特性就可以推断出布质和布量。
(3)水温检测
水温检测由温度检测器MTS102执行.由于MTS102有线性度好,对温度敏感等特点,故采用它对常温检测有较大的优点.在电路中,采用二个运算放大器对MTA102的输出信号进行处理,一个用于隔离阻抗,一个用于信号的放大.着个电路结构如图1的AN1端所接的电路.水温一般为4~40度;在一些特殊的洗衣机中有时会加
入热水,则水温较高.但水温不会超过60度.因为水的温度太高对衣服有很大的影响。
洗衣机模糊控制
工业洗衣机模糊控制系统技术策略及实现 摘要]介绍了模糊控制这一被称为“21世纪的核心技术”的研究背景;提出了工业洗衣机模糊控制系统开 发的技术策略和设计框架;综述了模糊控制知识库的建立和模糊控制器的设计以及系统的硬件设计和软件 设计. [关键词]工业洗衣机;模糊控制;模块化设计;多任务编程 1 研究的背景和意义 模糊数学和模糊控制的概念是加利福尼亚大学 教授扎德(L A Zadeb)在他的《Fuzzy Sets》、《Algo- rithm》和《A Rationale For Fuzzy Control》等论著 中首先提出[1].1974年英国伦敦大学教授E H Manidani首先应用模糊控制逻辑研制成功模糊控 制器.1979年,英国I J Procyk和E H Manidani研 制成功自组织模糊控制器,标志着模糊控制器“智能 化”程度的进一步提高.1984年年底国际模糊系统 学会成立.模糊控制理论从提出至今虽然只有20 多年,但是无论在模糊理论的算法、模糊推理决策、 工业控制应用、模糊系统集成,以及自学习、自适应 和工程应用方面都取得了长足的进步[2]. 模糊控制是智能控制领域的重要发展方向,模 糊控制技术被称为“21世纪的核心技术”.模糊控制 技术进入商品化,使产品的自动化和智能化水平不 断提高. 工业洗衣机广泛应用于宾馆、饭店、医院、部队、 学校、车站、客运码头等洗涤衣物量大的场所,由于 洗涤容量大、洗涤效率高以及洗净度高等特点,赢得 了越来越大的市场. 对工业洗衣机模糊控制系统的研制与开发,旨 在进一步提高其自动化、智能化程度,将给工业洗衣 机以更强大的生命力.系统的研制开发是以XGQ- 25型全自动洗涤脱水机为原型机,实现洗涤过程的 模糊控制.原型机是程序控制洗涤脱水机,用户根 据不同洗涤物的布质、布量、脏污状况凭经验选择多 个功能键,决策因人而异,洗涤效果自然有差别.采 用模糊控制技术的全自动洗涤脱水机,用电脑全部 或部分代替人脑进行洗涤过程的决策,由计算机进 行模糊判断、推理和决策,并自动生成优化的洗涤方 案,使整个洗涤过程在无需人工干预的情况下自动 完成,而且可以节水、节电、省时、省心.经文献检索 确认,迄今,模糊控制工业洗衣机研制在国内外尚属 空白.因此,笔者的研制成果不仅具有重大的科学 意义,而且可以增强国产工业洗衣机的国内外市场 竞争力.
电气自动化控制中人工智能分析
电气自动化控制中人工智能分析 1.人工智能应用理论分析 人工智能属于自然科学和社会科学交叉的一门边缘学科,涉及众多学科,比如哲学与认知科学、计算机科学等,其研究范畴是智能搜索、感知问题、逻辑程序设计、遗传算然、自然语言处理等。从本质上来讲,人工智能就是模拟人的思维的信息过程。两条道路可以用于对人的思维模拟,一条是结构模拟,对人脑的结构机制进行模仿,将类人脑的机器制造出来;另一条是功能模拟,暂时将人脑的内部结构撇开,在模拟是从人脑的功能过程出发。对人脑思维功能的模拟的典型事例就是现代电子计算机,它模拟了人脑思维的信息过程。人工智能并不意味着人的智能,更不意味着对人的智能的超越。从本质上来将,机器思维不同于人类思维的地方表现在四个方面,一,前者是无意识的机械的物理的单纯过程,而后者主要是心理和生理的过程;二,前者没有社会性;三,前者没有人类的意识所特有的能动的创造能力;四,电脑的功能总是在人脑的思维之后。 2.人工智能控制器的优势 人工智能控制器诸如模糊神经,遗传算法等都可以看做一类非线性函数近似器,经过这样的分类,我们就能够较好地对其进行总体理解,也有利于统一开发控制策略。和常规的函数估计其相比,这些人工智能控制器具有下列优势:没有控制对象的模型也可以设计人工智能
器。在很多场合,实际控制对象的精确动态方程是很难得到的,在设计控制器时实际控制对象的模型通常也存在着诸多不确定性因素,比如,和最优 PID 控制器相比,模糊逻辑控制器的上升时间是其1.5倍,下降时间是其 3.5 倍,过冲更加小;相对于古典控制器,人工智能控制器的调节更容易;在缺乏必要的专家知识时,通过相应数据也能够将人工智能控制器设计出来;对语言和相应信息进行运用也可能将人工智能控制器设计出来;人工智能的一致性良好,即使使用一些新的位置输入数据也能得到良好的估计,和驱动器的特性是没有关系的。目前,如果没有使用人工智能的控制算法,也许对特定对象具有良好的控制效果,但是对其他控制对象就不一定具有一致性的良好的控制效果,因此应该依据徒具对象进行具体设计;对新信息或新数据,人工智能控制器的适应性良好;人工智能控制器能够将常规方法解决不了的问题解决掉;人工智能控制器的抗噪声干扰能力良好;实现人工智能控制器控制价格低廉,尤其是只是对最下配置进行使用的情况下;人们和容易扩展和修改人工智能控制器。 3.人工智能技术在电气自动化控制系统中的应用 3.1 人工智能在直流传动中的应用 3.1.1 模糊逻辑控制应用 Mamdani 和 Sugeno 型是主要的两类模糊控制器。现阶段,在调速控制系统中只用到了 Mamdani 模糊控制器。需要注意的是这两种控制器都有一个 if-then 模糊规则库,但是如果 x 是 A,并且 y 是B,那么 Z=f(x,y)是 Sugeno 型控制器的典型规则,这里 A、B 是
全自动洗衣机模糊控制器设计说明
全自动洗衣机模糊控制器设计 1 简介 洗衣机自问世以来,经过一个多世纪的发展,现正呈现出全自动、多功能、大容量、高智能、省时节能的发展趋势。近年来,电子技术、控制技术、信息技术的不断完善、成熟,为上述发展趋势提供了坚强的技术保障。美国教授查徳(L.A.Zandeh)在1965年首先提出模糊集合的概念,由此打开了模糊数学及其应用的大门。1974年英国教授马丹尼(E.H.Mamdani)首先将模糊集合理论应用于加热器的控制,创造了模糊控制的基本框架。1980年,Sugeno开创了日本的首次模糊控制应用于一家富士电子水净化厂。1983年他又开始研究模糊机器人。随着模糊控制技术的不断发展,模糊控制逐渐被应用到日用家电产品的控制,例如电饭锅﹑照相机﹑吸尘器﹑洗衣机等。模糊控制全自动滚筒洗衣干衣机是通过模糊推理找出最佳洗涤烘干方案,以优化洗涤烘干时间、洗净程度、烘干效果,最终达到提高效率,简化操作,节水节电省时的效果。 2 模糊洗衣机的基本原理 洗衣机的自动控制系统为一多输入多输出系统,输入量为衣质、衣量、脏污程度(即水的浑浊度)、脏污性质(浑浊度变化率);输出量为洗涤剂量、水位、水流、脱水时间、洗涤时间、漂洗方式等。从洗衣机的运行过程可以看出,洗涤剂量、水位、水流、脱水时间都可以通过输入量推理求得,而洗涤时间与漂洗方式为实时控制量,影响其主要因素是被洗物品的脏污程度,这两个量可以用水的浑浊度和浑浊度变化率来表示,油性脏污的浑浊度变化率小,泥性脏污的浑浊度变化率大。实际分析证明:输入与输出之间很难用一定的数学模型来描述,系统的具体条件具有较大的不确定性,其控制过程在很大程度上依赖于操作者的经验,用常规的控制方法难以达到理想的效果。而采用模糊控制技术就能很容易解决问题。因而采用了模糊控制器设计全自动洗衣机。在洗涤衣物的过程中,衣物的多少、面料的软硬、衣物的脏污程度等都是模糊量,所以必须经过大量的实验,总结出人为的洗涤方式,从而形成模糊控制规则。再根据检测系统检测到的信息,判断出衣物多少、面料软硬、脏污程度、脏污性质等,计算出控制量,从而完成注水量、洗涤时间、水流强弱、洗涤方式、脱水时间、排水等一列的设置。根据上述分析和模糊控制技术的基本原理,可以确定洗衣机的模糊控制框如图。
人工智能-模糊控制全自动洗衣机 -
模糊控制全自动洗衣机 1.模糊控制简介 模糊控制是一种非线性的控制方法,主要针对那些无法取得数学模型或数学模型相当粗糙的系。首先要对被控对象按照人们的经验总结出模糊规则,采用模糊量,借助单片机对这些信息按照模糊规则转换为控制量,来完成自动控制。2.应用前景 近年来,模糊控制在家用电器控制中得到较广泛的应用,采用模糊控制的洗衣机,可具有自动识别衣质、衣量、脏污程度、脏污性质、自动决定水量、自动投入恰当的洗涤剂等功能,不仅实现了洗衣机的全面自动化,也大大提高了洗衣的质量。 3.基本原理 洗衣机的自动控制系统为一多输入多输出系统,输入量为衣质、衣量、脏污程度(即水的浑浊度)、脏污性质(浑浊度变化率);输出量为洗涤剂量、水位、水流、脱水时间、洗涤时间、漂洗方式等。从洗衣机的运行过程可以看出,洗涤剂量、水位、水流、脱水时间都可以通过输入量推理求得,而洗涤时间与漂洗方式为实时控制量,影响其主要因素是被洗物品的脏污程度,这两个量可以用水的浑浊度和浑浊度变化率来表示,油性脏污的浑浊度变化率小,泥性脏污的浑浊度变化率大。 4.模糊洗衣机的模糊推理 在模糊洗衣机中,浑浊度,布质,布量等都是通过对现行状态的检测,在通过模糊推理得出的.在模糊推理中,需要考虑推理的前件和后件,也就是推理的输入条件和输出结果.在模糊洗衣机中,主要是考虑布质,布量,水温和肮脏程度着几个条件,而从这些条件求取水位,洗涤时间和水流,漂洗方式和脱水时
间等.故而,模糊洗衣机的推理如图2所示。 图2模糊洗衣机的模糊推理 在模糊洗衣机中,布质和布量是无法通过物理传感器测出的;所以,它们的求取都是采用间接的方法.布质,布量和洗涤的过程有很大的关系.从一般人们的经验知道,布质是绵质,则洗涤会困难一些;布质如果是化学纤维,则困难会小一些.布量多一些,则洗涤过程要长一些,反之短一些.所以,除了肮脏度之外,模糊推理还考虑布质和布量. 从图2中可以看出,模糊洗衣机是一个多输入多输出的模糊推理和控制系统.在实际中,模糊推理的前件和后件之间的相关关系对于不同的因素而有所不同. 例如,肮脏程度和水温可以确定洗涤剂投放的量剂和洗涤时间,而布量、布质等可以确定水位和水流、脱水时间等。因此,在推理中把有关前件和后件进行处理。这种处理分成主要因素推理和顺序因素推理两种。通过这两种推理处理,不但使推理变得较为简单,而且可以在众多因素中清晰的区别出连锁关系的因素。 考虑到洗衣过程中的两种情况,一种是静态的,即洗涤剂浓度;另一种是动态的,即洗衣水流及时间。故而推理分两大部分,这也就是洗涤剂浓度推理和洗衣推理。 在洗涤剂浓度推理中,其规则如下:如果浑浊度高,则洗涤剂投入量大;如
人工智能在工业自动化中的应用
龙源期刊网 https://www.360docs.net/doc/0516026372.html, 人工智能在工业自动化中的应用 作者:苑振宇孟凡利李晋高宏亮张华 来源:《科技创新与应用》2020年第25期 摘 ;要:人工智能是一个研发训练计算机来执行以前只有人类才有能力的智能行为方法的研究领域。自动化的目的是代替人或辅助人去完成人类生产、生活和管理活动中的特定任务,提高工作效率、效益和效果。二者都是通过机器延伸增加人类认识世界和改造世界的能力。文章从人工智能的定义及发展、自动化的定义及发展、智能制造对人工智能的要求、工业人工智能的涵义、面临的挑战及应对策略等方面进行了阐述,分析了人工智能与工业自动化的关系。 关键词:人工智能;自动化;工业人工智能 中图分类号:G434 文献标志码:A ; ; ; ; 文章编号:2095-2945(2020)25-0176-03 Abstract: Artificial intelligence is a research field that develops and trains computers to execute intelligent behavior methods that was only possessed by humans. The purpose of automation is to replace or assist people to complete specific tasks in human production, life, and management activities, and enhance the work efficiency, benefits, and effects. Both are through the extension of the machine to increase the human ability to recognize and transform the world. This paper explains the definition and development of artificial intelligence, the definition and development of automation, the requirements of intelligent manufacturing for artificial intelligence, the meaning of industrial artificial intelligence, the challenges facing and the response strategies, etc. The relationship between artificial intelligence and industrial automation is analyzed. Keywords: artificial intelligence; automation; industrial artificial intelligence 1 人工智能与自动化 1.1 人工智能的定义及发展简史 1.1.1 人工智能的定义 美国国家科技委员会于2016年制定的《为人工智能的未来做好准备》指出,目前并没有一个普遍接受的人工智能定义。一些人把人工智能定义为是计算机化的系统,能够表现出通常被认为是需要智能的行为;其他人将人工智能定义为一个系统,该系统能够无论遇到什么样的复杂问题,都可以合理的解决,或者采取适当的行动实现它的目标。虽然对AI的界定并不明确且随时间推移不断变化,但AI的研究和應用始终秉持一个核心目标,即使人的智能行为实现自动化或复制。美国总统行政办公室于2016年发布的《人工智能、自动化及经济报告》中指出,AI不是单一技术,而是应用于特定任务的技术集合。2017年,《Science》定义的强人
人工智能在电气工程自动化的应用
人工智能在电气工程自动化的应用 是在科学技术方面还是在国民经济方面我国都取得了高速发展,在电力领域,特别是在电气工程自动化技术方面的发展更是可以用翻天覆地来形容。作为新兴技术人工智能技术的整体发展被大多数企业所看好,同时还给予了大量的资金支持使其用于产品开发。在电气工程自动化当中AI技术为其带来的益处较多,比如:能够将工作效率有效提升上来,从根本上降低对物力以及人力各方面的消耗;再者因为其应用情况,有效防止了许多人工可能出现的误差,所以,有效确保了电力领域当中各个产业的发展。 1概述 1.1人工智能技术。时代的不断进步加速了人工智能技术的产生,同时也是进入信息化的标志之一,主要是研究智能发展模式和人们的工作状态,其主要就是为了通过智能机器人系统对部分人工操作进行替代,进而从根本上保证工程运行的智能化。人工智能所包含的领域十分广泛,主要有语言学、计算机科学等。所以,从另一方面来讲,人工智能能够将其划分为思维科学技术的一种,其理论研究和具体实践工作主要是围绕思维科学来进行的。从思维方面来讲,其同时涵盖的有逻辑思维、形象思维以及灵感思维等。和其他学科相比,人工智能技术的发展离不开数学的大力支持。将人工智能和数学融合在一起,可以从根本上促进人工智能技术的不断进步。 1.2电气工程与自动化中人工智能技术的应用特点和优势。人工智能技
术在电气工程与自动化当中具体应用主要体现在数字化系统管理方面,在电气工程与自动化当中应用人工智能技术能够从根本上减小工人劳动强度,降低生产成本,从根本上确保生产效率的不断提高,有效推动电气工程与自动化水平的健康可持续发展,对部分人工操作进行替代,减少了人工成本的支出,从根本上确保企业运行的持久性和稳定性。利用人工智能技术还能够对电气工程与自动化的具体生产制造情况进行实时监控,如果有紧急情况发生的话,能够在第一时间内找出解决的办法,有效防止安全事故的发生。 2电气工程自动化中的应用 2.1人工智能技术在故障诊断中的运用。在具体运行的时候,由于在操作电气设备的时候存在着操作不当的现象,再加上经过长时间的运行,零部件存在着老化的情况,难免会导致设备故障的产生。设备产生故障之后必须要及时找出发生故障的位置及其原因,进而采取对应的措施进行解决。发生故障之后对其进行准确的分析是非常重要的,现阶段诊断故障的方法主要有以下三种:在规则的基础上对故障进行推理、基于故障树模型的故障诊断、基于案例对故障进行推理。以上三种对故障进行推理分析的方法可以只使用一种,也可以多种组合在一起进行使用。人们通过人工智能技术,进行了人工智能算法的开发,与传感技术和数据采集技术相结合,进行了故障诊断系统的设计,可以及时准确的将故障所在位置及其原因找出来,从根本上减少了时间和维修成本的浪费。故障诊断系统在结构上主要包括机械故障案例库、故障诊断规则库、故障诊断数据库、故障推理机、知识处理、故障诊断过程解释机、学习系统
洗衣机模糊控制matlab仿真
洗衣机模糊控制仿真1.模糊控制背景 1980年,Sugeno开创了日本的首次模糊应用——控制一家富士电子水净化厂。1983年他又开始研究模糊机器人。 随着模糊控制技术的不断发展,模糊控制逐渐被应用到日用家电产品的控制,例如电饭锅﹑照相机﹑吸尘器﹑洗衣机等。 2.仿真目的 本次仿真的主要目的是设计一个比较合理的洗衣机模糊控制器,它能够根据被洗涤衣物的污泥多少和油脂多少,综合得到洗涤时间,从而达到最佳的洗涤效果。 3.仿真方法 本次仿真借助matlab中集成的模糊控制工具箱,使用图形界面进行模糊控制器的设计。最后随意给定几组输入,得到输出并作出简单分析。 4.模糊控制器的设计 模糊控制器理论设计方法 ①选择合适的模糊控制器类型; ②确定输入输出变量的实际论域; ③确定e,e ?,u ?的模糊集个数及各模糊集的隶属度函数; ④输出隶属度函数选为单点,可使解模糊简单; ⑤设计模糊控制规则集; ⑥选择模糊推理方法; ⑦解模糊方法。 实际设计过程 ①模糊控制器类型:选用两输入单输出模糊控制器,控制器输入为衣物的污泥和油脂,输出为洗涤时间。 ②确定输入输出变量的实际论域:输入为Mud(污泥)和Grease(油脂),设置Range=[0
100](输入变化范围为[0,100]);输出为Time(洗涤时间),Range=[0 60](输出变化范围为[0,60])。 对应matlab 中模糊控制模块: ③确定模糊集个数及各模糊集的隶属度函数:将污泥分为3个模糊集:SD (污泥少)MD (污泥中)LD(污泥多);将油脂分为三个模糊集:NG (油脂少)MG (油脂中)LG (油脂多);将洗涤时间非为5个模糊集:VS (很短)S (短)M (中等)L (长)VL (很长)。 输入﹑输出隶属度函数都定为三角形隶属函数。结合④输出隶属度函数选为单点,可使解模糊简单;定义污泥隶属函数如下 50)50()(x x SD -=μ 0≤x ≤50 50x 0≤x ≤50 50)100(x - 50<x ≤100 50)50()(-=x x LD μ 50<x ≤100 对应matlab 中隶属度函数仿真图如下: 由隶属函数设置污泥的3个模糊集参数为 [Input1] Name='Mud' NumMFs=3 MF1='SD':'trimf',[-50 0 50] MF2='MD':'trimf',[0 50 100] MF3='LD':'trimf',[50 100 150] 定义油脂隶属函数如下: 50)50()(y x SG -=μ 0≤y ≤50 50y 0≤y ≤50 50)100(y - 50<y ≤100 50)50()(-=y x LG μ 50<y ≤100 对应matlab 中隶属度函数仿真图如下: 由隶属函数设置油脂3个模糊集参数为 [Input2] Name='Grease' NumMFs=3 MF1='SG':'trimf',[-50 0 50] MF2='MG':'trimf',[0 50 100] MF3='LG':'trimf',[50 100 150] 定义输出时间隶属函数如下: μ VS (Z)=(10-Z)/10 0≤Z ≤10
人工智能在自动化学科中的应用
人工智能在自动化学科中的应用 社会的进步和人类的长寿要求生产力更加发达,要求人类的经济生活更加智能化,以节省宝贵的人类时间去做其它有益的事情。自动化领域的革新需要人工智能的大力支持,而人工智能在自动化学科方面的优势在这个领域也确实能够得到极大的发挥,促进自动化的发展进步。 自动化是研究与电气工程有关的系统运行、自动控制、电力电子技术、信息处理、试验分析、研制开发以及电子与计算机应用等领域的一门学科。实现机械的自动化,让机械部份脱离人类的直接控制和操作自动实现某些过程是自动化和人工智能研究的交汇点。积极运用人工智能的知识。 人工智能在电力系统运行控制中的应用综述人工智能技术(AI)广泛应用于求解非线性问题中,在电力系统的控制、管理、运行等领域发挥着重要的作用。阐述了专家系统、人工神经网络、模糊集理论和启发式搜索等人工智能技术在电力系统中各自的应用特点,展望了人工智能技术在电力系统中的发展趋势,指出混合智能是人工智能的重要发展方向之一。 电力系统应用人工智能的起因电力系统运行控制的一个基本目标就是在经济合理的条件下向用户提供高质量的电能。为此,有必要对电力系统进行规划、监视和控制。随着电力系统规模的不断增加,能源管理系统(EMS)运行人员所面临的决策任务也日趋加大,这使得运行人员很难保证电力系 简要介绍了现有的高级人工智能技术的发展概况及其实现方法,全面综述了模糊逻辑(F L)、专家系统(ES)、人工神经网络(ANN)和遗传算法(GA)等典型人工智能技术在电能质量控制中的应用情况及国内外的研究现状,并就值得进一步研究的问题及今后的主要研究方向进行了展望. 近年来,电能质量问题受到人们越来越广泛的关注.对电能质量问题的正确诊断和处理 需要高水平的专家知识,并且所需要的专家知识不是仅仅在某一个领域,而是涉及到电气工程中的许多领域,如电子驱动、传感器、旋转电机、变压器、电力电子、电能传输与供应、保护、谐波、信号分 人工智能在智能传感器领域的应用 传感器在自动化信息系统中的重要性不言而喻,它的特性的好坏、输出信息的可靠性对整个系统的质量至关重要。各行各业的自动化程度的迅速提高,特别是工业生产的自动化程度的提高,对传感器的性能提出了更高的要求。传统的传感器技术由于存在着性能不稳定、可靠性差、准确度低等缺点已经不能够满足自动化技术迅猛发展的需要。而人类在人工智能方面取得的进展为人工智能与传感器技术的结合———新型智能传感器的出现提供了契机。
单片机的全自动洗衣机的设计方案(全面)
基于8051单片机的全自动洗衣机的设 计
基于8051单片机的全自动洗衣机的设计 【摘要】:本文介绍模糊控制在全自动洗衣机中的应用,包括模糊全自动洗衣机的模糊推理、物理量检测以及它的洗衣过程和控制电路。其中控制电路是以宏晶科技生产的高速/低功耗/超强抗干扰的新一代8051系列的STC12C5A60S2单片机为控制电路核心,其主要由电源电路、状态检测电路、显示电路和输出控制电路组成,分别介绍了各控制电路的工作原理和控制元件的组成,在教案设计训练方面具有较好的实用价值。 【关键词】:模糊控制单片机传感器全自动洗衣机 一、前言 模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程。该方法首先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化的信号作为模糊规则的输入,完成模糊推理,将推理后的输出量加到执行器上。模糊控制的基本原理如图一所示,它的核心部分是模糊控制器,模糊控制器的模糊规律由计算机的程序实现的。与传统控制理论相比,模糊控制有两大不可比拟的优点:第一模糊控制在许多应用中可以有效且便捷地实现人的控制策略和经验;第二,模糊控制可以不需要被控对象的数学模型即可实现较好的控制,这是因为被控对象的动态特性已隐 含在模糊控制器输入、输出模糊集及模糊规则中。模糊控制原理框图如图一所示。
图一模糊控制原理框图 从传统控制角度看,传统全自动洗衣机实际上是一台按事先设定好的参数进行顺序控制的机器。从这个意义上说,其“全自动”并不具有任何功能,它不能根据情况和条件的变化来改变参数;而模糊逻辑控制的全自动洗衣机向真正的智能化的全自动迈进了一大步,它的目标则是要求根据所洗衣服的数量、种类和脏的程度来决定水的多少、水流的强度和洗衣的时间,并可以动态的改变参数,以达到在洗干净衣服的情况下还要尽量不伤衣服、省电、省水、省时的目的;另外,要求操作简单,任何人都可以轻松地使用,且能够把工作情况和过程显示出来。 二.模糊洗衣机的物理量检测 要对洗衣机进行控制,首先要用各种传感器不断地检测相关的状态,以作为控制的依据。下面介绍在模糊控制洗衣机中所用各种参数的检测原理和技术,在检测中要用到光电传感器、布量传感器、水温和水位传感器等。 1.衣物污染量和污染性质检测 衣物的肮脏量、肮脏性质和洗净程度等都需要检测,以便进行工作过程的整定和控制,污染量和污染性质的检测是采用红外光传感器完成的。利用红外线在水中的透光和时间的关系,通过模糊推理,以得出检测结果,而这个结果就可以用于控制推理。由于直接检测衣物的污染状况是困难的,因此模糊洗衣机是通过检测洗涤液污染程度,而间接检测出衣物的污染量和污染性质,因此洗涤液的浑浊程度与衣物污染情况密切相关。光传感器由相对设于排水阀两旁的红外发光二极管和光敏晶体管构成的。发光二极管透过洗涤液向光敏晶体二极管发光,由光敏晶体管转换成电压,再由微电脑读取该数值,由此测出洗涤液的污染状况。浑浊度检测器构造如图二所示。
基于模糊控制智能洗衣机
-- 1课题背景及意义 现代洗衣机是利用电能产生机械作用来洗涤衣物的清洁电器。洗衣机主要由箱体、洗涤脱水桶、传动和控制系统等组成,有的还装有加热装置。洗衣机一般专指使用水作为主要的清洗液体,有别于使用特制清洁溶液及通常由专人负责的干洗。洗衣机的出现,将人们从诸如手搓、棒打等重复而又令人疲劳的简单劳动中解放出来,提高了清洗衣物的工作效率,继而提高了人们的生活质量。随着科学技术的不断进步,人们对洗衣机的制造水平和性能指标也日益提升,基于模糊控制的智能洗衣机便是顺应时代发展的科技产物之一。 回顾洗衣机的发展史,1858年,一个叫汉密尔顿·史密斯的美国人在匹茨堡制成了世界上第一台洗衣机,标志着用机器洗衣的开端。次年在德国出现了一种用捣衣杵作为搅拌器的洗衣机。1874年,“手洗时代”受到了前所未有的挑战,美国人比尔·布莱克斯发明了木制手摇洗衣机。1880年,美国又出现了蒸气洗衣机,蒸气动力开始取代人力。蒸汽洗衣机之后,水力洗衣机、内燃机洗衣机也相继出现。1910年,美国的费希尔在芝加哥试制成功世界上第一台电动洗衣机。电动洗衣机的问世,标志着人类家务劳动自动化的开端。1922年,美国玛塔依格公司改造了洗衣机的洗涤结构,把拖动式改为搅拌式,使洗衣机的结构固定下来,这也就是第一台搅拌式洗衣机的诞生。1932年,美国本德克斯航空公司宣布,他们研制成功第一台前装式滚筒洗衣机,洗涤、漂洗、脱水在同一个滚筒内完成。第一台自动洗衣机于1937年问世。这是一种"前置"式自动洗衣机。1955年,日本研制出独具风格、并流行至今的波轮式洗衣机。60年代的日本出现了带干桶的双桶洗衣机,人们称之为“半自动型洗衣机”。70年代,生产出波轮式套桶全自动洗衣机。70年代后期,以电脑(实际上微处理器)控制的全自动洗衣机在日本问世,开创了洗衣机发展史的新阶段。 1974年英国学者E.H.Mamdani首次把模糊集合理论成功地应用在锅炉和蒸汽机的控制之中,在自动控制领域中首开模糊控制在实际工程上应用之先河[1]。到了80年代,以模糊控制和神经网络为代表的智能控制技术广泛地运用到洗衣机的制造过程中。90年代初,模糊家电风靡日本,给日本企业带来了巨大的商业利润,同时也推动欧美和其它国家,进一步促进了模糊技术的发展[2]。上个世纪80年代末期到90年代中期先后提出了模糊近似推理、模糊自适应控制、模糊神经元网络和模糊自适应推理系统等。给模糊技术的应用注入了新的活力, --
基于MATLAB的洗衣机模糊控制设计
基于MATLAB的洗衣机模糊控制设计
基于MATLAB的洗衣机模糊控制设计 摘要:模糊洗衣机是一种智能型的洗衣机,它和传统的洗衣机相比,是一种全新的家用电器。传统的全自动化洗衣机有两种,一种是机械控制式,一种是单片机控制式。无论采用什么方式,它们都需要进行人为的洗涤程序选择,衣质和衣量选择,然后才能投入工作。在本质上讲,这种洗衣机还称不上是全自动的,最多只能称为半自动的。 用单片机控制的模糊洗衣机和传统的洗衣机有很大的区别,它能自动化识别衣质、衣量、自动识别肮脏程度、自动化决定水量、自动投入恰当的洗涤剂,从而全部自动地完成整个洗染过程。由于洗涤程序是经过模糊推理而决定的,有着极高的洗涤效能,从而不但大大提高洗衣机的全自动化程度,也大大提高了洗衣的质量。 用单片机控制的模糊洗衣机能够说是真正的全自动洗衣机。在整个控制过程中,单片机和模糊控制软件起了决定作用。 关键词:洗衣机、智能型、模糊控制、自动化
1 课题背景及意义 洗衣机自问世以来,经过一个多世纪的发展,现正呈现出全自动、多功能、大容量、高智能、省时节能的发展趋势。近年来,电子技术、控制技术、信息技术的不断完善、成熟,为上述发展趋势提供了坚强的技术保障。L·A·Zadeh教授最早提出了模糊集合理论,由此产生了模糊控制技术,其突出的优点是:不需要对被控对象建立精确的数学模型。对于复杂的、非线性的、大滞后的、时变的系统来说,建立数学模型是非常困难的。全自动滚筒洗衣干衣机的自动化、智能化控制正是一种难以建立精确数学模型的控制问题,采用模糊控制技术,能够很方便的控制洗衣干衣过程。模糊控制全自动滚筒洗衣干衣机是经过模糊推理找出最佳洗涤烘干方案,以优化洗涤烘干时间、洗净程度、烘干效果,最终达到提高效率,简化操作,节水节电省时的效果。模糊控制全自动滚筒洗衣干衣机属于创新项目,填补国内空白,达到国际先进水平。它的研制成功,必将大大推动中国乃至世界洗衣
人工智能和机器学习自动化测试介绍
人工智能和机器学习自动化测试介绍 敏捷世界的自动化功能测试标准和需求 人们通常认为需要在功能和产品稳定之后进行自动化功能测试。恕我直言,这是对自动化的浪费,特别是现在人们都看到了基于敏捷的交付实践的价值,并且开始使用了增量软件交付。 使用这种方法,最重要的是在产品构建的阶段尽可能多地自动化测试,我们要遵循自动化测试金字塔的原则。一旦团队知道现在在顶层(UI 层)需要自动化一些什么之后,我们就应该自动化这些测试。 由于产品在不断发展,测试肯定会随着产品的发展而失败。这不是测试的问题,而是测试没有跟随产品的发展而发展。 想要让之前通过的测试再次通过,自动化功能测试工具、框架应该使现有测试的更新和演变尽可能地简单。可能需要在定位器中进行变更,或者需要在流中进行,这并不是很重要。 如果这个过程很简单,团队成员会从自动测试执行和其工具框架中获益匪浅。 自动化测试的目标清晰可见 这是我认为的自动化测试最重要的方面,了解什么自动化了,它是否能展现出相对于一系列UI 操作之外的价值。 确定性和健壮性测试–定位器和维护 如果测试执行环境不变(比如说测试中的产品、与测试相关的测试数据等等),自动化测试的结果应保持一致。这个方面也可以被认为是测试稳定性。 如果因为某些原因,测试失败了(比如产品的缺陷,测试没有更新等),每次重复执行该测试也应该以相同的原因失败。
保证测试确定性和健壮性的一个方法是保证可以定位并可靠地更新定位器,从而让维护变得简单。在某些情况下,工具集可能会使用(人工)智能来找出识别相同元素的下一个最佳方案,防止因定位器改变而找不到元素导致的测试失败。尤其是在唯一的定位器不可用的情况下,或者定位器的变更是基于产品状态的情况下。 也可以用不同的方法来唯一地识别一个元素。工具和框架需要支持多定位器的识别,测试作者应该能够详细说明如何使用它们。 通常导致测试失败的原因如下: 定位器是动态的,每次产品的发布或使用都会造成变化。 定位器依赖于被测试产品的环境。 比如:基于运行测试时的数据集 上面提到的因素会让实现确定性和健壮性的自动化测试变得不太可能。 在相对来说比较新的工具集中,我很高兴看到它们能够以各种各样的定位器策略来识别一个元素。在你多次运行测试的时候,工具能知道测试的预期,也会尽可能用最可靠的方法找到元素。这样,测试的健壮性就得到了提升,既不会影响测试的质量,也不会让测试“不经意的通过”。 测试片段的编写、更新和自定义应简单且可复用 应该非常容易编写自动化功能测试的片段,并按照需求,选择不同的数据值复用它们。这些代码片段可能包含简单逻辑、条件逻辑,也可能包含一些重复的内容。 比如说:登录代码片段,被记录和实现一次,在所有需要使用特定数据登录的测试中使用。
全自动洗衣机的工作原理及构造
全自动洗衣机的工作原理及构造 全自动洗衣机综合运用了大量力学、电学、光学等知识,以下就其原理和构造作一分析。洗衣机的洗涤过程主要是在机械产生的排渗、冲刷等机械作用和洗涤剂的润湿、分散作用下,将污垢拉入水中来实现洗净的目的。首先充满于波轮叶片间的洗涤液,在离心力的作用下被高速甩向桶壁,并沿桶壁上升。在波轮中心处,因甩出液体而形成低压区,又使得洗涤液流回波轮附近。这样,在波轮附近形成了以波轮轴线为中心的涡流。衣物在涡流的作用下,作螺旋式回转,吸入中心后又被甩向桶壁,与桶壁发生摩擦。又由于波轮中心是低压区,衣物易被吸在波轮附近,不断地与波轮发生摩擦,如同人工揉搓衣物,污垢被迫脱离衣物。其次,当衣物被放进洗涤液之后,由于惯性作用运动缓慢,在水流与衣物之间存在着速度差,使得两者发生相对运动,水流与衣物便发生相对摩擦,这种水流冲刷力同样有助于污垢离开衣物。再次由于洗衣涌形状的不规则,当旋转着的水流碰到桶壁后,其速度和方向都发生了改变,形成湍流。在湍流的作用下,衣物做无规则地运动并翻滚,其纤维不断被弯曲、绞纽扣拉长,衣物相互相摩擦,增大了洗涤的有效面积,提高衣物的洗净的均匀性。全自动洗衣机是通过水位开关与电磁进水阀配合来控制进水、排水以及电机的通 断:从而实现自动控制的。电磁 进水阀起着通、断水源的作用。 当电磁线圈断电时,移动铁芯在 重力和弹簧力的作用下,紧紧顶 在橡胶膜片上,并将膜片的中心 小孔堵塞,这样阀门关闭,水流 不通。当电磁线圈通电后,移动 铁芯在磁力作用下上移,离开膜 片,并使膜片的中心小孔打开, 于是膜片上方的水通过中心小 孔流入洗衣桶内。由于中心小孔 的流通能力大于膜片两侧小孔的 流通能力,膜片上方压强迅速减小,膜片将在压力差的作用下上移,闭门开启,水流导通。 水位开关实际上是一个压力开关。气室的入口与洗衣桶中的贮气室相联接。当水注入洗衣桶后,贮气室口很快被封闭,随水位上升,贮气室的水位也上升,被封闭的空气压强亦增大,水位开关中的波纹膜片受压而胀起,推动顶杆运动而使触点改变,从而实现自动通断。智能型模糊控制的全自动洗衣机还可以自动判断水温、水位、衣质衣量、衣物的脏污情况,决定投放适量的洗涤剂和最佳的洗涤程序。其方法是:在洗衣桶内注入一量水后使电机低速运转,平稳后快速断电,洗衣桶在惯性作用下带动电机继续转动。此时,电机绕组产生反电动势,对其半波整流并放大整形后获得一矩形脉冲系列。通过分析脉冲个数和脉冲宽度。就能得到衣质衣量情况。衣物的脏污程度是通过水的透明度来判断的。在洗衣桶的排水口处加一红外光电传感器,使红外光通过水而进入另一侧的接收管。若水的透明度低,接收管获得的光能小,说明衣物较脏。脱水时采用压电传感器。当脱水桶高度旋转时,从脱水桶喷射出来的水作用于压电传感器上,根据这个压力变化,自动停止脱水运转。 Ap1008115 李汝迪
洗衣机模糊控制matlab仿真
洗衣机模糊控制仿真 1.模糊控制背景 美国教授查徳(L.A.Zandeh)在1965年首先提出模糊集合的概念,由此打开了模糊数学及其应用的大门。 1974年英国教授马丹尼(E.H.Mamdani)首先将模糊集合理论应用于加热器的控制,创造了模糊控制的基本框架。 1980年,Sugeno开创了日本的首次模糊应用——控制一家富士电子水净化厂。1983年他又开始研究模糊机器人。 随着模糊控制技术的不断发展,模糊控制逐渐被应用到日用家电产品的控制,例如电饭锅﹑照相机﹑吸尘器﹑洗衣机等。 2.仿真目的 本次仿真的主要目的是设计一个比较合理的洗衣机模糊控制器,它能够根据被洗涤衣物的污泥多少和油脂多少,综合得到洗涤时间,从而达到最佳的洗涤效果。 3.仿真方法 本次仿真借助matlab中集成的模糊控制工具箱,使用图形界面进行模糊控制器的设计。最后随意给定几组输入,得到输出并作出简单分析。4.模糊控制器的设计 4.1模糊控制器理论设计方法 ①选择合适的模糊控制器类型; ②确定输入输出变量的实际论域; ③确定e,e?,u ?的模糊集个数及各模糊集的隶属度函数; ④输出隶属度函数选为单点,可使解模糊简单; ⑤设计模糊控制规则集; ⑥选择模糊推理方法; ⑦解模糊方法。
4.2实际设计过程 ①模糊控制器类型:选用两输入单输出模糊控制器,控制器输入为衣物的污泥和油脂,输出为洗涤时间。 ②确定输入输出变量的实际论域:输入为Mud(污泥)和Grease (油脂),设置Range=[0 100](输入变化范围为[0,100]);输出为Time(洗涤时间),Range=[0 60](输出变化范围为[0,60])。 对应matlab 中模糊控制模块: ③确定模糊集个数及各模糊集的隶属度函数:将污泥分为3个模糊集:SD (污泥少)MD (污泥中)LD(污泥多);將油脂分为三个模糊集:NG (油脂少)MG (油脂中)LG (油脂多);将洗涤时间非为5个模糊集:VS (很短)S (短)M (中等)L (长)VL (很长)。 输入﹑输出隶属度函数都定为三角形隶属函数。结合④输出隶属度函数选为单点,可使解模糊简单;定义污泥隶属函数如下 50)50()(x x SD -=μ 0≤x ≤50 50 x 0≤x ≤50 =Mad μ =)(x MD μ 50 ) 100(x - 50<x ≤100 50)50()(-=x x LD μ 50<x ≤100 对应matlab 中隶属度函数仿真图如下:
电气工程与自动化中人工智能的应用
电气工程与自动化中人工智能的应用 随着我国社会经济的进步,人民的生活水平得到了显著的提升,经济发展为我国的工业带来了很大的机遇,从而提高了我国的工业水平。如今,我国的各行各业的竞争十分激烈,如果企业想要得到更好的发展,就要不断的提高企业的受益,随着科学技术的发展,人工智能技术在电气工程自动化领域被广泛应用,提高了电气工程自动化的水平,从而提高了企业的经济效益[3]。 1人工智能在电气工程自动化中表现出的优势 1.1.表现出突出的一致性 一般来说,控制方式是以一对一的方式为主,传统控制方式的优势是具有明确的目标,针对性很强,能够为特定的目标审计,而且这种传统的控制方式效果十分的突出,不会顾及其他对象。人工智能技术在这方面也有自己的独到之处,这种独到之处叫做一致性,换句话说就是人工智能技术可以能够控制所有的对象[2]。 1.2人工智能参数能够更改 如果想要优化机器的性能,只能通过对参数的修改,而人工智能
满足这个条件,通过更改人工智能的参数,就能提高人工智能机器的性能。人工智能和传统的控制机相比有很多独特的优势:(1)有较强的适应能力;(2)人工智能不需要复杂的操作,不需要专业的操作人员,人工智能可以自动的设定合适的参数,有效地减轻了相关人员的工作量;(3)人工智能可以根据实际的情况对参数进行相应的修改,从而使工作有效进行。 1.3充分利用人力资源 传统的电气工程自动化设备炒作复杂,而且设备的类型比较多样。因为电气设备类型较多,所以需要不同类型的工作人员定期仔细的对电气设备进行检查和维修,而且检查和维修的工作十分繁重,消耗大量的人力物力财力。而人工智能技术与其相比,不需要很多的电气工程自动化设备,从而可以减轻相关人员的工作量,还可以节省大笔的养护和检修费用,实现了人力资源的充分利用[5]。 1.4几乎不受其它因素的影响 传统的控制器受很多的因素的影响,尤其是在构建模型时,而且传统控制器对构建模型会产生许多不利的影响。而人工智能技术则会解决这些不良的因素,人工智能技术对环境和参数都没有太多的要求。
基于模糊控制的全自动洗衣机自动控制系统
目录 基于模糊控制的全自动洗衣机自动控制系统 目录 摘要 ······························································································· I Abstract ··························································································· II 1绪论 (1) 1.1全自动洗衣机的介绍 (1) 1.1.1全自动洗衣机的发展背景 (1) 1.1.2全自动洗衣机的发展前景 (1) 1.1.3全自动洗衣机的设计目的 (2) 1.1.4模糊控制理论简介 (2) 1.2全自动洗衣机的设计方案 (3) 1.2.1按键 (3) 1.2.2洗衣机的自检 (3) 1.2.3洗衣程序 (3) 1.2.4显示 (4) 1.2.5传感器 (4) 2硬件电路介绍 (5) 2.1 CPU选型 (5) 2.289C51的存储器与寄存器 (7) 2.3A/D转换器 (7) 2.4传感器 (10) 2.5显示器 (11) 3软件设计 (14) 3.1全自动洗衣机中的模糊控制 (14) 3.1.1模糊控制器 (14) 3.1.2模糊控制实现方法 (14) 3.2软件流程图及代码 (15) 3.2.1寄存器 (15)
目录 3.2.2流程图及其代码 (16) 3.3伟福仿真器 (52) 3.3.1伟福仿真器简介 (52) 3.3.2伟福仿真器特点 (53) 结论 (54) 致谢 (55) 参考文献 (56) 附录A程序代码 (60) 附录B原理图 (69)
洗衣机模糊控制建模
智能控制课程作业 模糊控制理论实验报告 题目洗衣机系统模糊控制建模与仿真 班级 姓名 学号
2014年3月13日 一.实验目的 通过设计洗衣机洗涤时间的模糊控制系统,理解模糊控制的基本原理。掌握模糊控制系统MATLAB建模与仿真的方法。 二.实验原理 洗衣机洗涤时间的模糊控制是一个开环模糊决策过程,其基本原理框图如图 1-1所示。它的核心部分是模糊控制器,模糊控制器的控制律由计算机程序来实现。 图1-1系统原理框图 系统选用两输入单输出的模糊控制器。控制器的输入为衣物的污泥量x和油脂量y,输出为洗涤时间z。 将污泥分为3个模糊集:SD (污泥少),MD (污泥中),LD (污泥多);将油脂分为3个模糊集:NG (油脂少),MG (油脂中),LG (油脂多);将洗涤时间分为5个模糊集:VS(很短),S (短),M (中等),L (长),VL很长。 首先,定义输入x,y变量,输出z变量的隶属函数。根据“污泥越多,油脂越多,洗涤时间越长”;“污泥适中,油脂适中,洗涤时间适中”;“污泥越少,油脂越少,洗涤时间越短”的规律建立洗衣机模糊规则表。然后,根据模糊规则进行模糊推理并得到洗涤时间的模糊集合。最终,利用重心法对模糊系统反模糊化,将洗涤时间的推理结果转化成精确值z输出。 三.实验内容 利用MATLAB软件实现上述洗衣机系统模糊控制的建模与仿真。 1. 建立x,y,z的隶属函数 洗衣机系统变量x,y,z的隶属函数分段表达式,如式1-1所示。
在MATLAB 中,定义本系统为一个 Mamdani (普通)型模糊控制系统,命 名为a 。根据式1-1,分段建立系统a 的x,y,z 变量隶属函数,如图1-2所示际 (X )=(50—x y 50 0兰x 兰50 lx /50 0兰x 兰50 D (X 鬥(100—x j/50 50 ex 兰100 % (x )=(x _50)/50 50 ex 兰100 ?NG (y 尸f 50 - y )/50 0兰y 兰50 fy/50 0兰y 兰50 2 ^M G "尸((100 —y )/50 50 cy 兰100 比G (y )=(y -50 y50 50 c y 兰100 》 s (z )=(10—z )/10 0兰z 兰10 fz/10 0 Ez 兰10 比㈠尸 j (25_z )/15 10cz 兰25 ff z —10 M15 10兰z 兰25 =? ?M (Z }= i 、「 J40—z )/15 25