KUKA机器人操作
KUKA机器人练习
一、理论
1、手动移动的速度设置叫()、程序移动的速度设置叫()
2、下列图标各代表何种坐标系
()()()()3、运行方式有哪些?
()
4、工具测量方法
1、确定原点()
2、确定姿态()
5、PTP 运动的特征是什么?
()
6、如何才能影响程序速度?
()
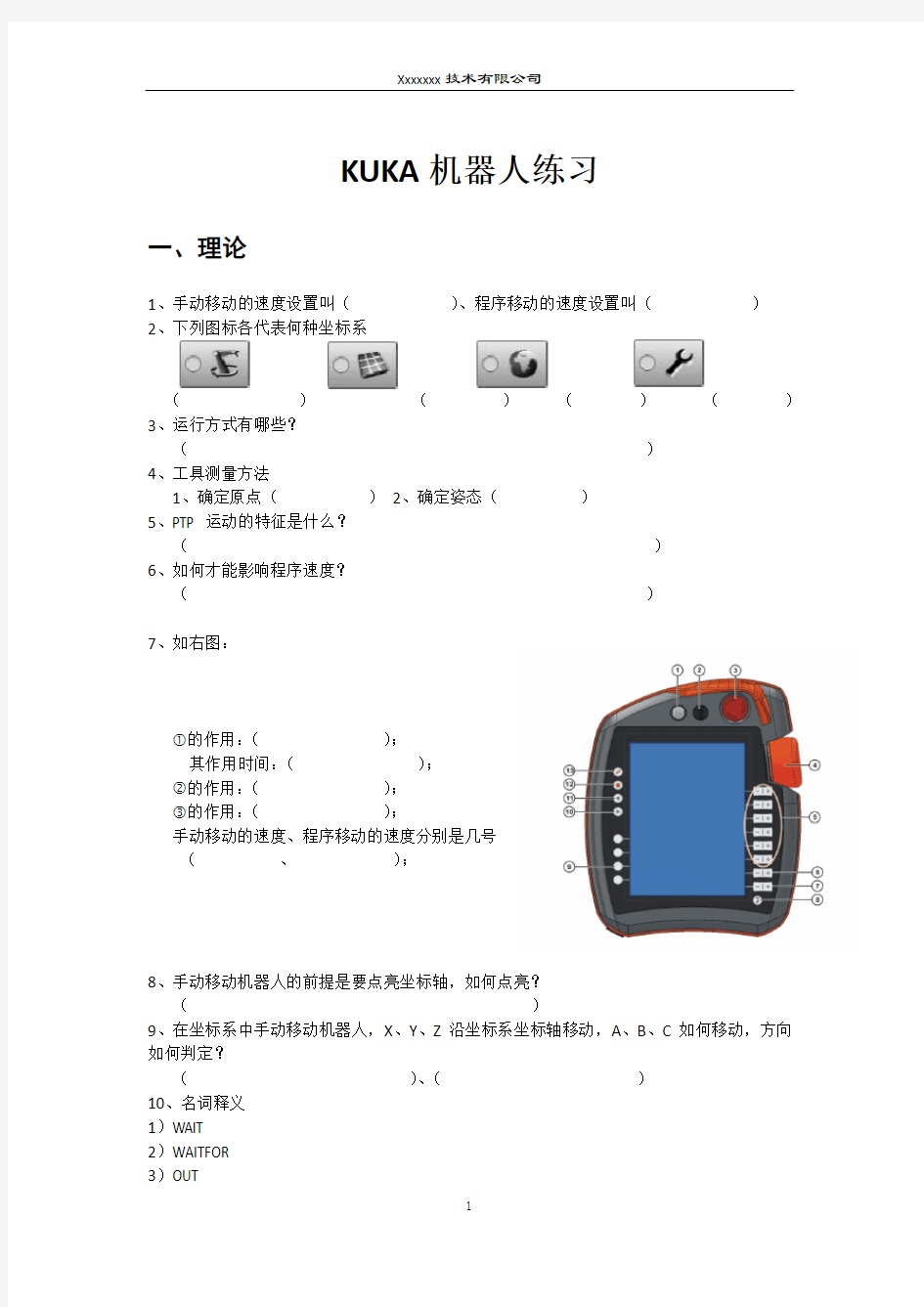
7、如右图:
①的作用:();
其作用时间:();
②的作用:();
③的作用:();
手动移动的速度、程序移动的速度分别是几号
(、);
8、手动移动机器人的前提是要点亮坐标轴,如何点亮?
()
9、在坐标系中手动移动机器人,X、Y、Z沿坐标系坐标轴移动,A、B、C如何移动,方向如何判定?
()、()
10、名词释义
1)WAIT
2)WAITFOR
3)OUT
4)SYN OUT
5)CONT
6)Vel
7)Acc
8)ARCON
9)ARCOFF
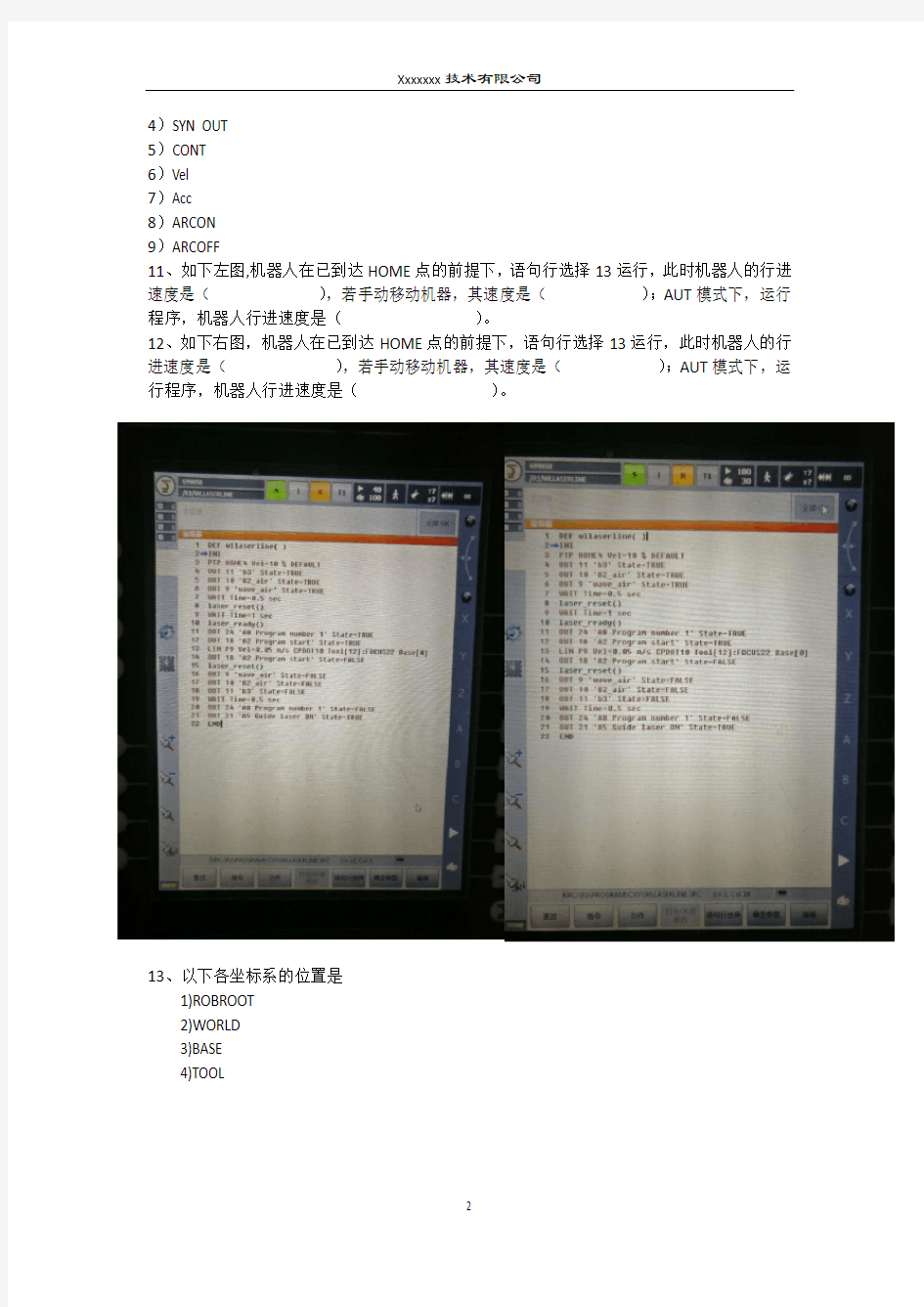
11、如下左图,机器人在已到达HOME点的前提下,语句行选择13运行,此时机器人的行进速度是(),若手动移动机器,其速度是();AUT模式下,运行程序,机器人行进速度是()。
12、如下右图,机器人在已到达HOME点的前提下,语句行选择13运行,此时机器人的行进速度是(),若手动移动机器,其速度是();AUT模式下,运行程序,机器人行进速度是()。
13、以下各坐标系的位置是
1)ROBROOT
2)WORLD
3)BASE
4)TOOL
二、操作
14、各机器开机,KUKA机器人导向光调用
15、工具坐标测量
16、单激光焊接程序编写
17、激光编程
18、单激光焊接(工艺参数要求:V=3m/min、+4离焦、气体流量:21L/min、焊接长度75.5mm)
19、单电弧焊接
20、激光电弧复合焊接
21、各机器关机
相关主题