MG 整车颜色一致的控制
MG整车颜色一致的控制
胡美芳詹建新
(南京汽车集团有限公司名爵汽车分公司涂装生产部邮编:230061)
摘要:本文主要介绍了MG整车颜色现状,色差产生原因、色差测试方法、整车色差现场控制的要素
关键词:整车颜色、色差测量、色差控制
一、MG整车颜色现状
在汽车销售过程中,著名的7秒钟定律就是客户在看到汽车实物7秒钟后,就决定是否购买,而其决定的主要依据之一就是汽车的外观颜色。汽车制造商为了达到客户最高满意度,实现最大产值,采用色彩营销,从耀目变换的金属闪光漆到魅力无限的珠光漆,提供给市场绚丽多彩的颜色。但金属闪光涂料随角度变化产生的易色现象,既让人们欣喜,又让人担忧。欣喜的是她的视觉效果,困扰的是如何控制金属涂料颜色稳定与配套件的一致。
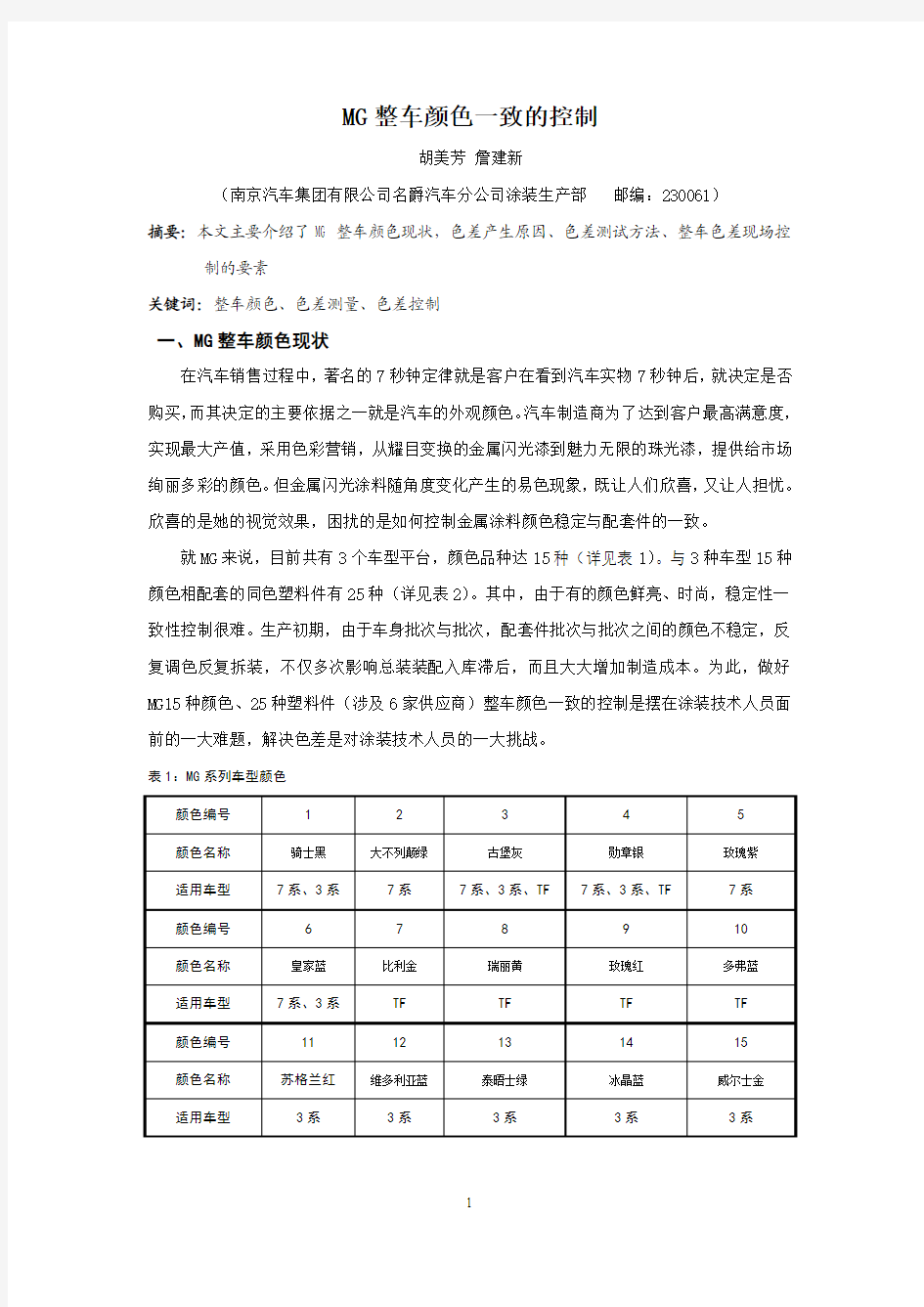
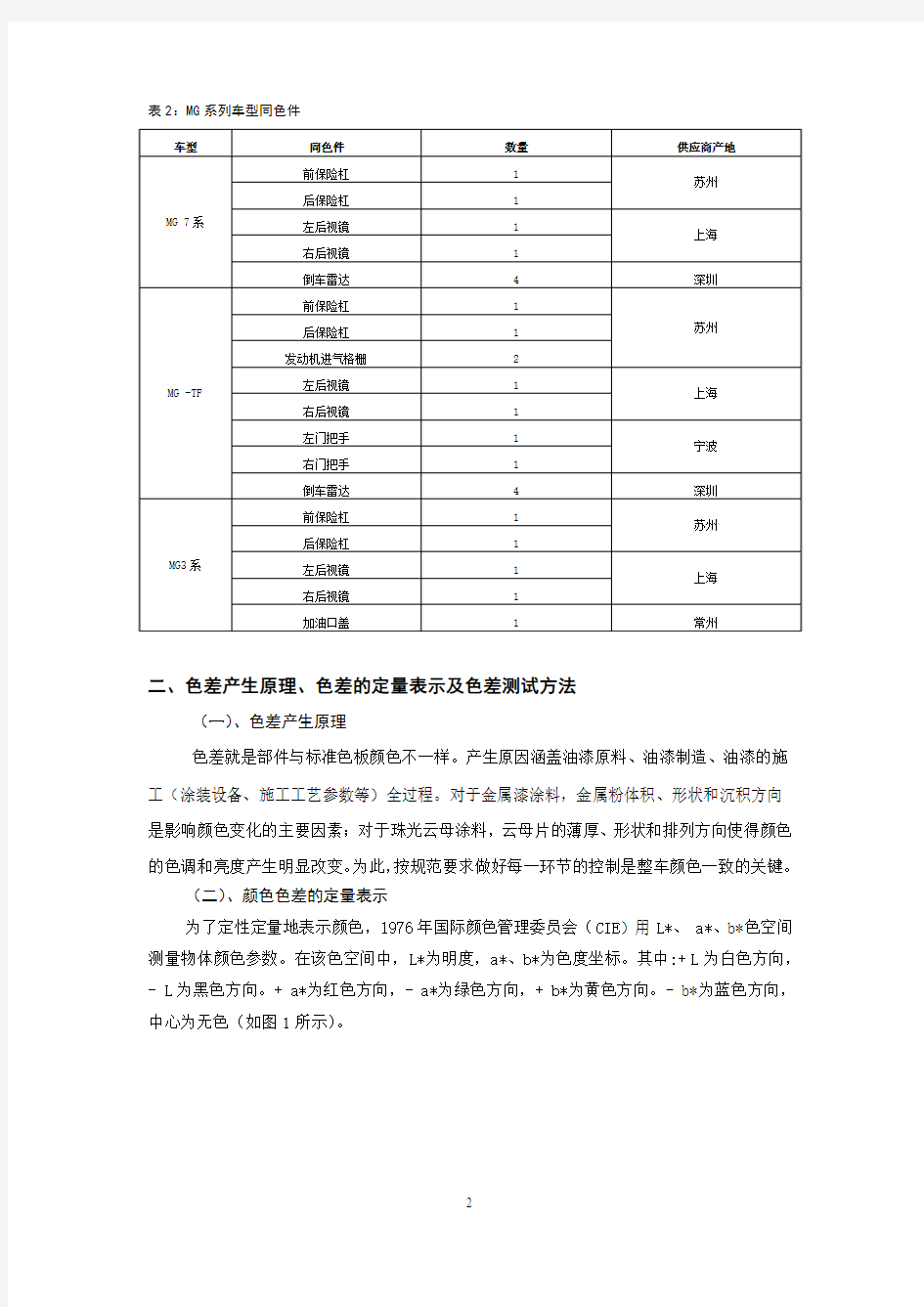
就MG来说,目前共有3个车型平台,颜色品种达15种(详见表1)。与3种车型15种颜色相配套的同色塑料件有25种(详见表2)。其中,由于有的颜色鲜亮、时尚,稳定性一致性控制很难。生产初期,由于车身批次与批次,配套件批次与批次之间的颜色不稳定,反复调色反复拆装,不仅多次影响总装装配入库滞后,而且大大增加制造成本。为此,做好MG15种颜色、25种塑料件(涉及6家供应商)整车颜色一致的控制是摆在涂装技术人员面前的一大难题,解决色差是对涂装技术人员的一大挑战。
表1:MG系列车型颜色
表2:MG系列车型同色件
二、色差产生原理、色差的定量表示及色差测试方法
(一)、色差产生原理
色差就是部件与标准色板颜色不一样。产生原因涵盖油漆原料、油漆制造、油漆的施工(涂装设备、施工工艺参数等)全过程。对于金属漆涂料,金属粉体积、形状和沉积方向是影响颜色变化的主要因素;对于珠光云母涂料,云母片的薄厚、形状和排列方向使得颜色的色调和亮度产生明显改变。为此,按规范要求做好每一环节的控制是整车颜色一致的关键。
(二)、颜色色差的定量表示
为了定性定量地表示颜色,1976年国际颜色管理委员会(CIE)用L*、 a*、b*色空间测量物体颜色参数。在该色空间中,L*为明度,a*、b*为色度坐标。其中:+ L为白色方向,- L为黑色方向。+ a*为红色方向,- a*为绿色方向,+ b*为黄色方向。- b*为蓝色方向,中心为无色(如图1所示)。
图1 L *
a *
b *
色空间
部件与标准色板之间的颜色差别即色差△E ab *= [(△L *)2+(△a *)2+(△b *)2]1/2
其中:△L *
= L *
部件- L *
标准(明度差异),
△a *
= a *
部件- a *
标准(红/绿差异), △b *
= b *
部件- b *
标准(黄/蓝差异)
如△L *
为正值,说明样品颜色偏浅;△L *
为负值,样品偏深。 △a *
为正值,样品偏红;△a *
为负值,样品偏绿。 △b *
为正值,样品偏黄;△b *
为负值,样品偏蓝。 一般情况下,△E ab *
值越小表示色差越小。 (三)、色差的测试方法
对于金属、珠光涂料,通常使用多角度分光光度仪评价L*、 a*、b*颜色效果。多角度分光光度仪(简称色差仪),从150
、250
、450
、750
、1100
这5个角度精确、客观、完整的评判金属、珠光涂料在不同角度的颜色变化。其测色原理如图2所示。
图2:色差测量角度示意图
15°视角测量为高光评色,该观测方向接近镜面反射,颜色受涂料内金属絮片影响很大。 110°视角测量为远离镜面反射,可排除大部分金属絮片的影响,测量结果显示样品漫反射颜色,即颜料本身的颜色。
通常以25°、45°及75°的色差测量结果作为色差的衡量指标,先将颜色标准样板的色度值输入到色差仪中,并以此作为基准进行测量,测量结果△E ab *
即为车身某点与颜色标
0Glanz
绿 -a*
准样板的色差值。
三、MG整车色差一致控制
(一)、制定色差控制标准范围
MG17种颜色经过试验室反复制板及现场反复装配试验评判、论证,并结合国内外知名汽车厂色差控制经验,我们初步得出以下控制范围与要求:首先必须目视合格;对于金属漆△E(45°)≤2,∣△a∣、∣△b∣≤1;对于单色漆(如约克白)△E(45°)≤1,∣△a ∣、∣△b∣≤0.5。在出现色差有争议时,由色差匹配小组召集零件和材料供应商在室外上午10点或下午2点阳光下评判,与同色合格车身比较。
(二)、标准色板统一制作统一发放
标准样板统一由MG公司委托油漆供应商制作,标准色板为长方形,规格为10×15厘米,标准色板油漆层必须包括中涂层、色漆层和清漆层。同一颜色的标准色板的25°、45°、75°三个角度与母板的色差△E必须都≤0.5(个别深色漆颜色不敏感漆除外),以及目视无色差(表3:标准色板发放统计)。在标准色板背面需注明编号、颜色名称、颜色代码、来源、认可日期以及三个角度(25°、45°、75°)与母板的色差△E/△a/△b/△L值。标准板制作完毕后,由综合技术部统一发放标准板到整车厂和各个同色件供应商,发放做好色板编号及发放日期等记录,以免与日后批次板混淆。此标准板即为整车及同色件发交评判依据。
表3:标准色板发放统计(例举)
(三)、统一色差测量仪器,消除测量评判误差
在统一了标准色板的基础上,整车厂与同色塑料件供应商统一色差仪型号,以消除不同色差仪带来的色差误差。同时定期(每月一次)将色差仪集中,依据15种颜色母板,逐一核查整车厂色差仪a、b、L测量数值与同色塑料件供应商色差仪a、b、L 测量数值,消除因仪器之间的差异而产生的色差。为防止色板老化和污染带来色差,要求色板放置于干燥无尘柜中,基本定于2年换发一次色板。
(四)、对同色件制定严格的入厂检查规范
对于小型同色塑料件供应商,由于受喷涂设备简陋,喷涂环境较差以及喷漆人员技能的影响,常常出现批次与批次色差不一致甚至同一台车前后保险杠色差很大的现象其中主要因素是喷涂厚度不一。为此,攻关组严格规定了约克白、瑞丽黄、多弗蓝、激情红、冰晶蓝、威尔士金这6种敏感色手工喷涂漆膜厚要求,具体是:约克白25~30μm、瑞丽黄25~30μm、多弗蓝20~25μm、激情红18~20μm、冰晶蓝14~16μm、威尔士金16~18μm。同时我们确定了严格的入厂检查规范:每批同色件入厂必须配带批次板及零件出厂检查报告(表4:零件出厂检查报告);在生产准备阶段对每批零件100检查色差并记录,SOP后,每批20%抽检记录。无出厂报告或出厂报告不合格或出厂报告不准确不接受入库。
表4出厂检测报告(例举)
供应厂家:苏州万达编号:WD/JL-7.6-08
检测人:钱建锋日期: 2008.5.30 审核:苏敏日期:2008.5.30
(五)、细化各喷涂过程参数,保证喷涂质量
MG涂装面漆采用的是“杯加杯”静电喷涂,在实际的喷涂过程中每个旋杯所喷涂的区域不同、颜色不同,其涂料的流量、成型空气、旋杯转速也不尽相同,同时由于受环境温湿度的影响,高温干燥季节和高温高湿季节加入的稀释剂品种、慢干溶剂比例也不尽相同,必须随时调整。所以在整车喷涂过程中,我们要不断细化各环节参数的控制。
以MG3系的冰晶蓝颜色为例:一度出现整车明度明显偏低现象,通过与油漆供应商技术专家共同探讨调整高杯参数,经过多次用载体车身贴板试验,最终将整车的明度提高到标准要求。其中两次调整参数如下(详见表5):
表5:高杯参数调整与色差关系
四、几点体会
色差控制是一项非常复杂的工作,可从以下几方面加强色差的控制:
(一)、控制好每批色漆的色差,这需要油漆供货商及油漆入厂检验部门的共同努力,摸索出切实有效的入厂检查手工喷涂试板与生产线机器人喷涂车身颜色一致性的趋势及微小差异范围,有效杜绝不合格的材料流入生产线。
(二)、定期对输调漆系统内油漆进行色差监控:特别是要跟踪油漆批次更换后进出压差情况、过滤袋内金属粉沉淀情况,定期喷涂试板测试色差变化情况,掌握颜色的变化趋势及时调整颜色使之色差值在控制范围内。对于在管路中长期循环且较长时间未喷的色漆,最好在批量生产前用报废零件试喷,以避免由于溶剂挥发或色浆积聚被过滤袋滤出而造成颜色偏差较大,影响正常生产。
(三)、定期检查机器人喷涂状态:通过定期对不同颜色车身测量各部位漆膜厚度、DOI 值、长波、短波值等性能,以达到对机器人喷涂流量、转速、成型空气、压缩空气清洁度跟踪定性检查的目的。
(四)、整车厂与同色件配套厂对色差的相关信息要及时进行沟通,信息共享。一旦出现车身色差外溢,一方面停止生产此种颜色进行油漆调整;一方面及时测量色差外溢的每台车身△E/△a/△b/△L 值,通知油漆供应商根据色差数据,派专人到零部件供应商现场进行调色,使同色件与色差外溢车身颜色匹配。
参考资料:
1.MG162013――2008汽车有色件比色测定标准
2.《最新涂装技术》王锡春主编
3.便携式五角度分光光度仪使用说明书
纯电动汽车整车控制器(TAC)
纯电动汽车整车控制器(TAC) 项目介绍: 纯电动汽车整车控制器对新能源汽车的动力性、安全性、经济性、操纵稳定性和舒适性等都有重要影响,它是新能源汽车上的一种关键装置。在车辆行驶过程中,整车控制器通过开关输入端口、模拟量转换模块、CAN总线等硬件线路采集路况信息、驾驶员意图、车辆状态、 设备运行状态等参数,依托高速运行的 CPU和控制端口来执行预设的控制算法和管理策略,再将指令和信息等通过 CAN总线、开关输出端口等对动力系统的执行部件进行实时的、可靠的、科学的控制,以实现车辆的动力性、可靠性和经济性。 其硬件结构框图如图一所示。
tihJTJt 川“ J人 整车控制器实物图如图二所 示。 it电" * st 电 M U 电柢第iC 4- if 邨 ESlh 卜 [? ■: *■ DC IX*科电乳 ■ 1 .^ptt'AN :■' - 彝竝 tt」 7%谢洩M!* WI KX T.7*帀小
性能指标: 1)工作环境温度:-30 C—+80C 2)相对湿度:5%~93% 3)海拔高度:不大于3000m 4)工作电压:18VDC —32VDC 5)防护等级:IP65 功能指标: 1)系统响应快,实时性高 2)采用双路 CAN总线(商用车 SAE J1939协议) 3)多路模拟量采样(采样精度10位);2路模拟量输出(精度 12位)4)多路低/高端开关输出 5)多路I/O输入 6)关键信息存储 7)脉冲输入捕捉 8)低功耗,休眠唤醒功能 该项目使用的INFINEON 的物料清单:
整车控制器(VMS, vehicle management Syetem ),即动力总成控制器。是整个汽车的核心控制部件,它采集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后, 控制下层的各部件控制器的动作,驱动汽车正常行驶。作为汽车的指挥管理中心,动力总成控制器主要功能包括:驱动力矩控制、制动能量的优化控制、整车的能量管理、CAN网 络的维护和管理、故障的诊断和处理、车辆状态监视等,它起着控制车辆运行的作用。因此VMS的优劣直接影响着整车性能。 纯电动汽车整车控制器 (Vehicle Controller)是纯电动汽车整车控制系统的核心部件,它对汽车的正常行驶,再生能量回收,网络管理,故障诊断与处理,车辆的状态与监视等功能起着关键的作用。 与各部件控制器的动态控制相比,整车控制器属于管理协调型控制。 整个车辆系统采用一体化集成控制与分布式处理的车辆控制系统的体系结构,各部件都有 独立的控制器,整车控制器对整个系统进行能量管理及各部件的协调控制。为满足系统数 据交换量大,实时性、可靠性要求高的特点,整个分布式控制系统之间采用CAN总线进 行通讯。 整车控制器主要由控制器主芯片,Flash存储器和RAM存储器及相关电路组成,控制器主 芯片的输出与Flash存储器和RAM存储器的输入相连。 整车控制器通过 CAN总线接口连接到整车的 CAN网络上与整车其余控制节点进行信息交换和控制。 控制器硬件包括微处理器、CAN通信模块、BDM调试模块、串口通信模块、电源及保护 电路模块等。微处理器选用了Motorola公司专门为汽车电子开发的MCgS12,它具有运 算速度快和内部资源与接口丰富的特点,适合实现整车复杂的控制策略和算法。CAN通信 模块符合CAN2.0B技术规范,采用了光电隔离、电源隔离等多项抗干扰设计;BDM调试模块用于实时对控制程序进行调试、修改;串口通信模块用于对控制系统的诊断和标定;电源模块进行了二级滤波的冗余设计,保证控制器在车载12V系统供电情况下正常工作,并具短路保护功能。 CAN,全称为"Controller Area Network ”,即控制器局域网,是一种国际标准的,高性价的现场总线,在自动控制领域具有重要作用。CAN是一种多主方式的串行通讯总线,具有较高的实时性能,因此,广泛应用于汽车工业、航空工业、工业控制、安全防护等领域。 决策层控制单元是车辆智能化的关键,其收集车辆运行过程中的信息,并根据智能算法的决 策向物理器件层控制单元发送命令;动力源控制单元负责调节动力源系统部件以满足决策层控制单元的命令要求;驱动/制动控制单元则调节双向变量电机和能耗制动系统实现车辆的各种工况,如驱动控制、防抱制动等。 整车控制器功能需求: 整车控制器在汽车行驶过程中执行多项任务,具体功能包括:(1)接收、处理驾驶员的驾驶
电动汽车整车控制器功能结构说明
新能源汽车整车控制器系统结构 和功能说明书 新能源汽车作为一种绿色的运输工具在环保、节能以及驾驶性能等方面具有诸多内燃机汽车无法比拟的优点,其是由多个子系统构成的一个复杂系统,主要包括电池、电机、制动等动力系统以及其它附件(如图1所示)。各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配,这项任务需要由控制系统中的整车控制器来完成。基于总线的分布式控制网络是使众多子系统实现协同控制的理想途径。由于CAN总线具有造价低廉、传输速率高、安全性可靠性高、纠错能力强和实时性好等优点,己广泛应用于中、低价位汽车的实时分布式控制网络。随着越来越多的汽车制造厂家采用CAN协议,CAN逐渐成为通用标准。采用总线网络可大大减少各设备间的连接信号线束,并提高系统监控水平。另外,在不减少其可靠性前提下,可以很方便地增加新的控制单元,拓展网络系统功能。 新能源汽车控制系统硬件框架 整车控制器电机控制器仪表ECU电池管理系统车载充电机MCU 外围 电路信号 调理 电路功率 驱动 电路电源 电路通讯 电路
图1新能源汽车控制系统硬件框架 一、整车控制器控制系统结构 公司自行设计开发的新能源汽车整车控制器包括微控制器、模拟量输入和输出、开关量调理、继电器驱动、高速CAN总线接口、电源等模块。整车控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。该整车控制器采集司机驾驶信号,通过CAN总线获得电机和电池系统的相关信息,进行分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动回馈控制。该整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。 其结构原理如图2所示。 电源模块 CAN 加速踏板传感器 制动踏板传感器模 拟 量 调 理微 控 制 器光 电
纯电动汽车整车控制器的设计
纯电动汽车整车控制器的设计 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。传 统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。纯电 动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。随着科 技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提 供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。本文 从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。 关键词:纯电动汽车;整车控制器;硬件设计;软件设计 纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能 量效率高等优点成为现代汽车的发展趋势。整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控 制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车 辆安全监控等功能。国外在纯电动汽车整车控制器的产品开发中,积极推行整车 控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。虽然国内 各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核 心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对 整车控制器的设计和开发展开研究。 一、整车控制系统分析与设计 (一)整车控制系统分析 复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车 通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行 驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统 发出操控命令,并接受各子控制器做出的反馈。 保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。整车控制器实时地接收传感器传 输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实 时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节 点的整车通信网络,实现了数据快速、可靠的传递。 (二)整车控制系统设计 复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟 踪动力电池电压来调整超级电容电压,使两者电压相匹配。为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系 统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。 整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成 了复合电源纯电动汽车的整车通信网络。 二、整车控制器硬件设计及软件设计
纯电动汽车整车控制器的设计
纯电动汽车整车控制器的设计 发表时间:2019-07-05T11:27:03.790Z 来源:《电力设备》2019年第4期作者:王坚 [导读] 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。 (柳州五菱汽车工业有限公司广西柳州 545007) 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。传统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。纯电动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。随着科技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。本文从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。 关键词:纯电动汽车;整车控制器;硬件设计;软件设计 纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能量效率高等优点成为现代汽车的发展趋势。整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车辆安全监控等功能。国外在纯电动汽车整车控制器的产品开发中,积极推行整车控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。虽然国内各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对整车控制器的设计和开发展开研究。 一、整车控制系统分析与设计 (一)整车控制系统分析 复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统发出操控命令,并接受各子控制器做出的反馈。 保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。整车控制器实时地接收传感器传输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节点的整车通信网络,实现了数据快速、可靠的传递。 (二)整车控制系统设计 复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟踪动力电池电压来调整超级电容电压,使两者电压相匹配。为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。 整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成了复合电源纯电动汽车的整车通信网络。 二、整车控制器硬件设计及软件设计 (一)整车控制器结构设计 整车控制器的硬件结构根据其基本的功能需求进行设计,如图1所示。支持芯片正常工作的微控制器最小系统是整车控制器的核心,基础的信号处理模块,CAN通信与串口通信组成的通信接口模块,以及LCD显示等其他模块分别作为它的各大功能模块。 图1 整车控制器硬件结构图 (二)整车控制器硬件设计 从功能上可以把整车控制器分为6个模块。 1)微控制器模块:本设计选用美国德州仪器公司TI的数字信号处理芯片TMS320F2812为主控芯片,负责数据的运算及处理,控制方法的实现,是整车控制器的控制核心。此芯片运算速度快,控制精度高的特点基本满足了整车控制器的设计需求。TMS320F2812的最小系统主要由DSP主控芯片、晶振电路、电源电路以及复位电路组成。 2)辅助电源模块:由于整车控制器的控制系统中用到多种芯片,所以需要设计辅助电源电路为各个芯片提供电源,使其正常工作,因此输出电平有多种规格。采用芯片LM317、LM337可分别产生+5V和-5V的供电电压。 3)信号调理模块:输入整车控制器的踏板信号是1~4.2V模拟电压信号,TMS320F2812的12位16通道的A/D采样模块输入的信号范围为0~3.0V,因此需要对踏板输入的模拟电压信号进行相应的调理运算,以满足DSP的A/D采样电平要求。选用德州仪器的OPA4350轨至轨运算放大器,在输入级采用RC低通滤波电路与电压跟随电路以滤除干扰信号,减小输入的模拟信号失真。开关信号先经RC低通滤波电路滤除高频干扰,再作为电压比较器LM393的正端输入,电压比较器的负端输入接分压电路,将LM393的输出引脚外接光耦芯片,在起到电平转换作用的同时,进一步隔离干扰信号,提高信号的安全性与可靠性。 4)通讯模块:TMS320F2812具有一个eCAN模块,支持CAN2.0B协议,可以实现CAN网络的通讯,但是其仅作为CAN控制器使用。选用3.3V单电源供电运行的CAN发送接收器SN65HVD232D,其兼容TMS320F2812的引脚电平,用于数据速率高达1兆比特每秒(Mbps)的应
电动汽车电机控制器
电动汽车电机控制器 一、电机控制器的概述 根据GB/T18488.1-2001《电动汽车用电机及其控制器技术条件》对电机控制器的定义,电机控制器就是控制主牵引电源与电机之间能量传输的装置、是由外界控制信号接口电路、电机控制电路和驱动电路组成。 电机、驱动器和电机控制器作为电动汽车的主要部件,在电动汽车整车系统中起着非常重要的作用,其相关领域的研究具有重要的理论意义和现实意义。 二、电机控制器的原理 图1汽车电机控制器原理图 电机控制器作为整个制动系统的控制中心,它由逆变器和控制器两部分组成。逆变器接收电池输送过来的直流电电能,逆变成三相交流电给汽车电机提供电源。控制器接受电机转速等信号反馈到仪表,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。 三、电机控制器的分类 1、直流电机驱动系统 电机控制器一般采用脉宽调制(PWM)斩波控制方式,控制技术简单、成熟、成本低,但效率低、体积大等缺点。 2、交流感应电机驱动系统 电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速,采用矢量控制或直接转矩控制策略实现电机转矩控制的快速响应。 3、交流永磁电机驱动系统 包括正弦波永磁同步电机驱动系统和梯形波无刷直流电机驱动系统,其中正弦波永磁同步电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速;梯形波无刷直流电机控制通常采用“弱磁调速”方式实现电机的控制。由于正弦波永磁同步电机驱动系统低速转矩脉动小且高速恒功率区调速更稳定,因此比梯形波无刷直流电机驰动系统具有更好的应用前景。
4、开关磁阻电机驱动系统 开关磁阻电机驱动系统的电机控制一般采用模糊滑模控制方法。目前纯电动汽车所用电机均为永磁同步电机,交流永磁电机采用稀土永磁体励磁,与感应电机相比不需要励磁电路,具有效率高、功率密度大、控制精度高、转矩脉动小等特点。 四、电动控制器的相关术语 1、额定功率:在额定条件下的输出功率。 2、峰值功率:在规定的持续时间内,电机允许的最大输出功率。 3、额定转速:额定功率下电机的转速。 4、最高工作转速:相应于电动汽车最高设计车速的电机转速。 5、额定转矩:电机在额定功率和额定转速下的输出转矩。 6、峰值转矩:电机在规定的持续时间内允许输出的最大转矩。 7、电机及控制器整体效率:电机转轴输出功率除以控制器输入功率再乘以100%。
电动汽车用整车控制器总体设计方案
电动汽车用整车控制器总体设计方案
目次 1 文档用途 (1) 2 阅读对象 (1) 3 整车控制系统设计 (1) 3.1 整车动力系统架构 (1) 3.2 整车控制系统结构 (2) 3.3 整车控制系统控制策略 (3) 4 整车控制器设计 (4) 5 整车控制器的硬件设计方案 (5) 5.1 整车控制器的硬件需求分析 (5) 5.2 整车控制器的硬件设计要求 (6) 6 整车控制器的软件设计方案 (7) 6.1 软件设计需要遵循的原则 (7) 6.2 软件程序基本要求说明 (7) 6.3 程序中需要标定的参数 (7) 7 整车控制器性能要求 (8)
整车控制系统总体设计方案 1 文档用途 此文档经评审通过后将作为整车控制系统及整车控制器开发的指导性文件。 2 阅读对象 软件设计工程师 硬件设计工程师 产品测试工程师 其他相关技术人员 3 整车控制系统设计 3.1 整车动力系统架构 如图1所示,XX6120EV纯电动客车采用永磁同步电机后置后驱架构,电机○3通过二挡机械变速箱○4和后桥○5驱动车轮。车辆的能量存储系统为化学电池(磷酸铁锂电池组○8),电池组匹配电池管理系 统(Battery Management System,简称BMS)用以监测电池状态、故障报警和估算荷电状态(State of Charge,简称SOC)等,电池组提供直流电能给电机控制器○2通过直-交变换和变频控制驱动电机运转。 整车控制器○1(Vehicle Control Unit,简称VCU)通过CAN(Control Area Network)和其它控制器联接,用以交换数据和发送指令。该车采用外置充电机传导式充电,通过车载充电插头利用直流导线联接充电 机○9,充电机接入电网。 ○1整车控制器○2电机控制器○3交流永磁同步电机○4变速箱○5驱动桥 ○6车轮○7电池管理系统○8磷酸铁锂动力电池组○9外置充电机○10电网连接插座 图1 整车动力系统架构简图
纯电动汽车整车控制系统教案
课程单元教学设计任课教师:科目纯电动汽车整车控制系统检修授课班级:
一、知识一、任务导入 假如你是北汽新能源4S店的一名车辆维修人员,需要对某待维修 的车辆进行整车状态参数读取,请问你会正确使用故障诊断仪进行 数据流读取吗? 二、容及过程设计 教师活动 1、电动汽车整车控制系统的作用 1.1控制系统的基本概念 控制系统一般包括传感器、控制器和执行元件。传感器采集信 息并转换成电信号发送给控制器,控制器根据传感器的信息进行运 算、处理和决策,并向执行元件发送控制指令以完成某项控制功能。 1.1.2北汽EV160纯电动汽车整车控制系统的组成 北汽EV160纯电动汽车的整车控制系统结构如图所示,按照各 部件的功能,可以将整车控制系统分为动力电池系统、充电系统、 驱动电机系统、传动系统、电动助力转向系统、制动系统等。该车 的主要高压部件,都集中在了汽车前机舱,如电机控制器、高压控 制盒DC/DC变换器、车载充电机、驱动电机等。 教 师: 引 出 话 题 教 师: 板 书、 展 示、 解 说、 提 问 提 问、 启 发 比 喻 多 媒 体 展 示、 互 动 步骤教学容教师、 学生 活动 教 学 方 法 与 手 段 时 间 分 配
二、 技能 一、技能训练项目及组织 2、实训组织 1)分两组,每次一组组,其他学生完成布置作业 2)实习、学习指导(教师分工 (1)一位教师负责实训室进行操作示 (2)另一位教师负责指导完成相关学习任务 3、使用设备 教师: 示演 示
4、安全和纪律要求 1、穿好工作服、讲究仪容仪表 2、服从安排,遵守纪律,讲究秩序 3、不允许擅自乱动设备 5、学习评估 按学校要求评估
整车控制系统整车控制器
整车控制系统电动汽车动力系统各零部件的工作都是由整车控制器统一协调。 而言,电动机驱动和制动能量回收的最大功率都受到电池放电/充电能对纯电动汽车 力的制约。增加由于其具有两个或两个以上的动力源,对混合燃料电池轿车和燃料电池大巴而言, 获得比了系统设计和控制的灵活性,使汽车可以在多种模式下工作适应不同工况下的需求,从而达到降低了有害物的排放,减小对环境的污染和危害,传统汽车更好的燃料电池性能,环保和节能的双重标准。系统的参首先要针对给定的车辆和参数的条件,选择合适的动力系统构型,完成动力 建立整车控制系统来协调汽车工作模式的切换和多个动力源/在此基础上,数匹配和优化。能量源之间的功率/能量流的在线优化控制。其主零部件控制器以及驾驶员操纵系统构成,整车控制系统由整车控制器、通信系统、要功能是根据驾驶员的操作和当前的整车和零部件工作状况,在保证安全和动力性的前提下,选择尽可能优化的工作模式和能量分配比例,以达到最佳的燃料经济性和排放指标。 (1)整车控制系统及功能分析 控制对象:电动汽车驱动系统包括几种不同的能量和储能元件(燃料电池,内燃机1) ,在实际工作过程中包括了化学能、电能和机械能或其他热机,动力电池和/或超级电容)之间的转化。 电动汽车动力系统能流图如图5—6所示。
整车控制系统结构:电动汽车动力系统的部件都有自己的控制器,为分布式分层控2)拓扑分 离使得物分布式分层控制可以实现控制系统的拓扑分离和功能分离。制提供了基础。功能分离使得各个从而减少了电磁干扰,理结构上各个子系统控制系统分布在不同位置上,子部件完成相对独立的功能,从而可以减少子部件的相互影响并提高了容错能力。所示。最底层是执行层,由部件控制器和一些执电动汽车分层结构控制系统如图5-7总线进行交互,并CAN行单元组成,其任务是正确执行中间层发送的指令,这些指令通过,它的主(VMS)且有一定的自适应和极限 保护功能;中间层是协调层,也就是整车控制器另一方面根据执要任务一方面根据驾驶员的各种操作和汽车当前的状态解释驾驶员的意图,由驾驶员或者制动驾驶仪来实现做出最优的协调控制;最高层是组织层,行层的当前状态,车辆控制的闭环。 整车控制系统对车辆性能的影响主要有三个方面:3)直接关系到汽车动力①动力性和经济性:整车控制器决定发动机和电动机转矩的输出, 在汽车燃料电池轿车和大巴有两个或两个以上的能量来源,影响驾驶员的操纵感觉;性能,实际行使过程中,整车控制器实施控制能量源之间的能量分配,从而实现整车能量的优化,获得较高的经济性。②安全性:燃料电池轿车和大巴上包括氢气瓶,动力电池等能量储存单元和动力总线, 及其控制器等强电环节,除了原有的车辆安全性问题(如制动和操作稳定性)电动汽车电机整车控制器必须从整车的角度及时检还增加了高压电安全和氢安全等新的安全隐患。之外,测个部件的工作状态,并对可能出现的危险进行及时处理,以保证成员和车辆的安全。 ③驾驶舒适性及整车的协调控制:采用整车控制器管理汽车上的各部件工作,可以整合汽车上
电动汽车能量回馈的整车控制(1)
2005005 电动汽车能量回馈的整车控制 张 毅,杨 林,朱建新,冒晓建,卓 斌 (上海交通大学汽车电子研究所,上海 200030) [摘要] 以4种典型循环工况为例对电动汽车进行能量分析,设计了基于常规汽车制动系统的整车能量回馈控制方式,研究了控制策略,完成了车辆道路试验与标定优化。试验表明,整车能量回馈控制方式与控制策略安全、可靠,且柔顺性良好;利用能量回馈技术,蓄电池能量消耗可减少10%,能有效延长电动汽车的一次充电续驶里程。 关键词:电动汽车,能量回馈,控制策略 The Control Strategy of Energy Regeneration for Electric Vehicle Zhang Yi,Yang Lin,Zhu Jianxin,Mao Xiaojian&Zhuo Bin Instit ute of A utomotive Elect ronic Technology,S hanghai Jiaotong U niversity,S hanghai200030 [Abstract] The energy consumption in four typical vehicle testing cycles(FTP,HWEFT,ECE2EUDC and J P1015)is analyzed for EV.Based on the traditional vehicle braking system,a new regenerative braking scheme and its control strategy are designed.The road testing,calibration and optimization are performed.T est results show that the control scheme and strategy is safe,https://www.360docs.net/doc/2412530842.html,ing the regenerating scheme,the energy consumption of battery can re2 duce by10percent and the driving range of EV in one charge can increase effectively. K eyw ords:Electric vehicle,E nergy regeneration,Control strategy 原稿收到日期为2003年12月29日,修改稿收到日期为2004年3月8日。 1 前言 电动汽车采用了新型的汽车动力,如何充分提 高车辆行驶能量效率,进而延长车辆续驶里程,是电 动汽车需要解决的一个关键问题。能量回馈是解决 该问题的主要技术措施。 能量回馈包括车辆制动能量回馈与车辆滑行能 量回馈两种。此时,驱动电机按发电机运行,将车辆 行驶动能转化为电能,可以起到3个作用:辅助制 动;回收能量给动力蓄电池充电,从而延长车辆续驶 里程;在车辆有供热需求时,直接利用这部分电能供 热取暖。 能量回馈制动与电动汽车其它电气制动方式 (主要有能耗制动、反接制动[1])比较,无须改变系 统硬件结构,回馈电流可柔性控制,可使制动效果与 能量回收效果综合最佳。因此,能量回馈是最适合 电动汽车的电气制动方式,其关键是能量回馈的过 程控制。电动汽车的能量回馈控制由整车控制与电 机控制交互作用而实现,作者在电动汽车制动能量 分析的基础上,设计一种能量回馈的整车控制方式, 并进行相应控制策略的研究。 2 制动能量分析 为了进行电动汽车能量回馈控制,需首先探明 其在各种用途中的制动能量回馈潜力。作者分别以 美国F TP工况、高速公路HFET工况、欧洲城市循 环ECE2EUDC工况和日本J P10154种循环工况为 例,进行制动能量的分析。 4种循环工况的驱动与制动能量如图1所示, 可见在这4种循环工况中,制动能量都占了不小的 比例,其中J P1015工况为2517%,ECE2EUDC工况 为18%,HFET工况为6%,F TP为25%。 回馈能量还与制动方式和回馈系统各环节的效 率因子有关[2]。电动汽车的制动方式包括:电气制2005年(第27卷)第1期 汽 车 工 程 Automotive Engineering 2005(Vol.27)No.1
电动汽车整车控制系统介绍
电动汽车整车控制系统介绍 本文主要探讨纯电动汽车整车控制系统功能及研发流程。根据用途,整个电气系统可分为动力系统、能源系统、底盘电子控制系统、照明指示系统、仪表显示系统、辅助系统、整车综合控制系统、空调系统和舒适性安全系统等子系统。其中很多功能模块都需要和整车综合控制系统相关。整车电气系统列出如表1所示。 整车综合控制系统根据驾驶员的操作指示(油门、刹车等),综合汽车当前的状态解释出驾驶员的意图,并根据各个单元的当前状态作出最优协调控制。 1 整车控制器系统配置 整车控制器与整车其他电气系统连接如图1所示。整车控制器通过CAN总线与电池ECU、电机ECU、电源分配ECU、ABS系统、中控门锁、仪表显示系统连接。与其余的电气系统通过IO端口连接(也可使用CAN通讯)。下面分别对各电气单元的功能要求分别叙述。 1.1 动力系统提供整车的动力输出,其核心是驱动电机和电机驱动ECU 电机驱动ECU通过CAN总线与整车综合控制器通讯。应能提供电机转速、转矩、功率、电压、电流、水温、工作模式等参数。并应该能接受整车控制器发来的控制命令。 1.2 能源系统包括电池、电池管理单元和电源分配系统 与整车控制器通讯的有电池管理ECU和电源分配ECU。 电池管理ECU对电池进行充放电管理及保护。它应能提供电池组总电压、电流、单体电池电压、温度、剩余电量、电池健康状态、故障类型等信息。 电源分配ECU应能提供各个子电源的电压、电流和工作温度以及故障类型等信息。 1.3 ABS系统应能提供各个车轮的转速、液压系统状态、各个制
动阀的状态以及自身的工作状态等信息 1.4 中控门锁,应提供各车门状态等信息 1.5 仪表显示系统,应向整车控制系统提供所显示信息的全部内容 1.6 照明指示系统,可以通过CAN总线来控制,也可以通过IO来指示照明指示系统的运行状态 1.7 转向助力、制动助力、变速箱需提供档位位置、液压压力、工作状态等信息 可以是简单的开关量也可以用CAN总线通讯。 1.8 驾驶员的油门踏板和制动踏板经信号调理后接入到整车控制器内 2 整车控制器详细功能 纯电动汽车的整车控制器的主要功能包括:汽车驱动控制、制动能量的优化控制、整车的能量管理、CAN网络的维护和管理、故障的诊断和处理、车辆状态监视、行车记录等。整车控制器功能框图如图2所示。整车控制器通过CAN总线和IO端口来获得如加速踏板开度、电池SOC、车速等信息,并根据这些信息输出不同的控制动作。 下面分别介绍各部分实现的具体功能。 2.1 汽车驱动控制 根据司机的驾驶要求、车辆状态等状况,经分析和处理,向电机控制器发出指令,满足驾驶工况要求。包括启动、前进、倒退、回馈制动、故障检测和处理等工况。 2.2 整车能量优化管理 通过对电动汽车的电机驱动系统、电池管理系统、传动系统以及其它车载能源动力系统(如空调)的协调和管理,以获得最佳的能量利用率。 2.3 网络管理 整车控制器作为信息控制中心,负责组织信息传输,网络状态监控,网络节点管理等功能,网络故障诊断和处理。
电动汽车控制系统毕业设计
摘要 在当前全球汽车工业面临金融危机和能源环境问题的巨大挑战的情况下,发展电动汽车,利用无污染的绿色能源,实现汽车能源动力系统的电气化,推动传统汽车产业的战略转型,在国际上已经形成了广泛共识。 本课题以电动汽车他励电机控制器为例,以实现电动汽车的加、减速,起、制动等基本功能以及一些特殊情况下的处理。以开发出高可靠性、高性能指标、低成本并且具有自主知识产权的电动汽车电机驱动控制系统为目的。主要包括硬件电路板的设计,以及驱动系统的软件部分的仿真调试。 在驱动系统硬件设计中,这里主控制芯片采用ATMEL公司的ATmega64芯片。功率模块采用多MOSFET并联的方式,有效的节约了成本。电源模块采用基于UC3842的开关电源电路。选用IR公司的IR2110作为驱动芯片,高端输出驱动电流可到1.9A,低端输出驱动电流可到2.3A,能够提供7个MOSFET并联时驱动电流。对于电流检测模块,本文没有采用电流传感器或者是康铜丝,而是采用了一种基于MOSFET管压降的电流检测电路,这种方式即节约了成本也保证了检测精度。 驱动系统的软件设计中,主要实现的功能为:开关量的检测处理,故障检测,串口通讯,励磁、电枢控制,报警功能等。针对他励电机电动汽车的控制特性,提出了节能控制算法和最大转矩控制算法,用于提高电动汽车的续航里程和加速性能。 他励直流电动机驱动系统能够很好的运行在电动汽车上,性能可靠、结构简 单,并且节约了成本,使电动汽车的性价比大大提高,有利于电动汽车的普及。 关键词:电动汽车,ATmega64,他励直流电机,PID模糊控制
目录 摘要 (1) 第一章绪论 1.1纯电动汽车在国内的发展状况 (3) 1.2 国外电动汽车发展现状 (3) 1.3 本课题的任务和主要工作 (4) 第二章他励电动机的控制理论基础 2.1他励直流电动机的调速与制动 (5) 2.1.1直流电动机电枢电动势和电磁转矩 (5) 2.1.2 他励直流电动机的机械特性 (6) 第三章系统的硬件设计 3.1系统硬件的整体设计方案 (10) 3.2主控制器MCU的介绍 (10) 3.2.1 MCU的选择 (10) 3.2.2 ATmega64的特性与内部结构 (11) 3.3开关电源模块 (12) 3.4电流检测模块 (13) 3.5驱动电路的设计 (16) 3.6电压检测电路 (17) 3.7温度检测电路 (18) 3.8加减速踏板信号检测电路 (19) 3.9 开关量输入信号 (20) 3.10蜂鸣器报警电路 (20) 3.11通讯模块电路设计 (21) 3.12硬件抗干扰的设计 (22) 3.13本章小结 (23) 第四章系统的软件设计 4.1 电动汽车的控制策略研
混合动力汽车整车控制器开发与试验
不断加深的世界能源危机以及严峻的环境问题促使世界各国把新能源汽车作为未来汽车工业发展的主流方向[1-2]。未来10年内,按照国家新能源汽车的相关政策和国际上技术发展的趋势,混合动力汽车和纯电动汽车将作为一种比较成熟的交通工具得到规模化的应用[3]。中国科技部也将“混合动力汽车产业化技术攻关”列为国家高技术发展计划(863计划)重点发展项目之一。 VCU是混合动力汽车的核心控制部件,高性能、高可靠性及成本低廉是其硬件设计需要考虑的三个重要方面。目前国内整车控制器多是针对相应车辆进行的专门设计,不同种类车辆使用的控制器硬件不能完全通用[4-6]。对VCU硬件进行通用性设计可以降低硬件设计、试验及维护成本。本文期望通过综合考虑多种HEV的控制需求,设计出符合通用性要求的VCU平台,届时仅更改其内部软件和外部接线方式即可使其匹配至诸如ISG(起动机/发电机一体化)、串联式、并联式等类型的混合动力汽车上,实现整车控制功能。 本文仅以某款并联混合动力公交车作为研究对象,对VCU的通用性设计和开发展开研究。 1并联混合动力汽车控制系统分析 如图1所示,该并联式混合动力公交车的动力来源为发动机和电动机,二者通过连接后桥的耦合器实现动力合成。VCU控制发动机、电机控制器和超级电容控制器,实现车辆各种工作模式。 VCU是混合动力汽车的核心控制单元,它采集加速踏板、制动踏板、离合踏板及其他部件信号并做出相应判断后,控制下层的各部件和控制器的动作, doi:10.3969/j.issn.1005-2550.2012.03.018 尉进,赵韩,江昊 (合肥工业大学机械与汽车工程学院,合肥230009) 摘要:基于飞思卡尔公司的双核微控制器9S12XDT512开发了一款通用的混合动力汽车(HEV)整车控制器(Vehicle Control Unit-VCU),设计时考虑硬件的通用性,使之能够适用于多种混合动力汽车的整车控制。为验证VCU功能,本文以某款并联混合动力公交车为控制对象,在基于dSPACE的硬件在环仿真系统上进行了一系列仿真试验。试验结果表明:VCU能够准确地控制整车实现混合动力工作状态,进而验证了VCU硬件的有效性。 关键词:混合动力汽车;整车控制器;9S12XDT512;双核微控制器;dSPACE;硬件在环仿真 中图分类号:U462文献标志码:A文章编号:1005-2550(2012)03-0070-06 Development and Testing of Vehicle Control Unit for Hybrid Electrical Vehicle WEI Jin,ZHAO Han,JIANG Hao (School of Mechanical and Vehicle Engineering,Hefei University of Technology,Hefei230009,China)Abstract:A general-purpose Vehicle Control Unit(VCU)was developed using a Freescale's microcontroller (9S12XDT512)with dual cores.In the development of VCU,generality of hardware was considered to make sure it could be applied to many kinds of Hybrid Electrical Vehicle(HEV)control.To verify the function of VCU,this article took a hybrid electrical bus as the controlled subject and then organized a series of simulation testing using a hardware in-the-loop simulation system based on dSPACE.The testing indicated that VCU could accurately control the vehicle to achieve hybrid working state,verifying the validity of the hardware of VCU. Key words:Hybrid Electrical Vehicle(HEV);Vehicle Control Unit(VCU);9S12XDT512;microcontroller with dual cores;dSPACE;hardware in-the-loop simulation 混合动力汽车整车控制器开发与试验 收稿日期:2012-02-03 基金项目:国家“863”节能与新能源汽车重大资助项目(2008AA11A 139) 70 ··
电动汽车电机及控制器性能测试系统
电动汽车电机及控制器性能测试系统 1 电机驱动系统的作用 电机驱动系统是电动汽车的核心,它与整车动力性能的好坏密切相关,是电动汽车关键技术之一。电机驱动系统由电动机和驱动控制器两部分组成。电动机是一种将电能转变为机械能的装置,为满足整车动力性能的需求,要求其具有瞬时功率大、过载能力强、加速性能好、使用寿命长、调速范围广、减速时实现再生制动能量回馈、效率高、可靠性高等特点。驱动控制器是将电池的电量转变为适于电动机运行的另一种电能变换控制装置。通过这种变换和控制使电动机处于最佳工作状态,以满足电动汽车实际行驶工况的需要,驱动控制器要求结构简单、控制精度高、动态响应好、系统高可靠、成本低。驱动电机及其控制器的性能好坏直接决定车辆的品质好坏,所以在试验室中正确地进行试验是必要的。 2 电机控制器性能测试设备 2.1 实验设备目前常用的测功机主要有直流电力测功机、交流电力测功机、电涡流测功机和水力测功机。直流电力测功机:由直流电机、测力计和测速发电机组合而成。直流电机的定子由独立的轴承座支承。它可以在某一角度范围内自由摆动。机壳上带有测力臂,它与测力计配合,可以检测定子所受到的转矩。转轴上的转矩可以由定子上量测。与直流电机类似,直流测功机调速性能好,控制简单,但由于换向器的原因,不适合高速运行,而且大功率的测功机相对于其他类型,体积较大。不适用于动力电机测试。交流电力测功机:由 1 台三相交流电动机和测
力计、测速发电机组成。它的测功原理与直流测功机相同,但不存在换向问题,结构简单,可靠性高。目前交流测功机在动、静态性能上已经得到了很大提高。电力测功机既可以进行电动性能测试,也可以进行馈电性能的测试。 2.2 测试方法 通过安装夹具及联轴器将被测电机与测功机连接,适当调整使轴与轴的对中度符合试验要求,对个别超高速电机,为防止试验过程中因为轴振动或对中不够精确引起轴承发热失效或者损坏电机的情况,可以考虑在适当位置安装振动传感器及温度传感器,对试验过程中局部情况实时监测,一旦有异常立即停止。针对标准的要求,试验时测试额定及峰值负载下的转速,转矩和效率特性,以及额定负载下的馈馈电特性。温升试验也是在台架上进行,分别测量电机绕组的温升和控制器的温升。电机和控制器都配备有散热系统,或水冷或风冷。电机及控制器从冷机状态下启动开始工作,温度会随之慢慢增加,在固定负载的情况下,温度最终会趋于稳定,这段时间内温度的变化量就是温升值。标准中有3种方法:电阻法、埋置检温计(ETD法和温度计法。试验电机不宜拆开。因此选用电阻法比较适合,通过比较试验前后环境温度、冷却水温度以及绕组直流电阻的变化来计算电机不同工况下的温升值。控制器的温升通过温度计即可测量。温升值根据不同产品的工作制要求进行测试。用在不同类型系统上的电机应选用不同的工作制,比如纯电动汽车,串联式、并联式以及混联式混合动力汽车,PLUG-IN混合动力汽车等不同类型的应用。在该项目中,标准里除了对温升值的要求外,对试验过程中电
纯电动汽车整车控制器技术要求
附录C:技术标准审批单 重庆科鑫三佳车辆技术有限公司 技术标准审批单 Q/KJC-B-0001-.2014-01 2015年12月2日 注:此表由起草单位会签完毕后,反馈到整车开发部存档。
Q/KJC 重庆科鑫三佳车辆技术有限公司企业标准 代号Q/KJC-C-0004-2015 纯电动汽车整车控制器技术要求 2015-12-5发布2016-1-1实施重庆科鑫三佳车辆技术有限公司发布
目次 前言 (4) 1、范围 (5) 2、规范性引用文件 (5) 3、术语 (6) 4、引脚定义 (6) 5、故障代码表 (7) 6、技术要求 (12) 7、试验方法 (15) 8、标志、包装、运输及储存 (20)
前言 本标准规定了重庆科鑫三佳车辆技术有限公司研发的纯电动汽车用整车控制器的技术要求。 本标准由重庆科鑫三佳车辆技术有限公司电子电器部提出。 本标准由重庆科鑫三佳车辆技术有限公司电子电器部归口并负责解释。 本标准由重庆科鑫三佳车辆技术有限公司电子电器部起草。 本标准主要起草执笔人:杨辉、曹政 本标准最终解释权归重庆科鑫三佳车辆技术有限公司电子电器部。 本标准发布情况为:2015年首次发布。
纯电动汽车整车控制器技术要求 1、范围 本标准规定了瑞驰EC35KX纯电动汽车用整车控制器的技术要求、实验方法、检验规则、标志、包装运输及贮存等要求。 本标准适用于瑞驰EC35KX纯电动汽车整车控制器。 2、规范性引用文件 下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。 QC/T 413 汽车电气设备基本技术条件 GB/T 2423.1 电工电子产品环境试验第2部分:试验A:低温 GB/T 2423.2 电工电子产品环境试验第2部分:试验B:高温 GB/T 2423.4 电工电子产品环境试验第2部分:试验Db:交变湿热试验方法 GB/T 2423.10 电工电子产品环境试验第2部分:试验FC:振动(正弦) GB/T 2423.17 电工电子产品环境试验第2部分:试验Ka:盐雾试验方法 GB/T 18655-2010/CISPR 25:2008 车辆、船和内燃机无线电骚扰特性用于保护车载接收机的限制和测量方法 ISO 16750.1-2003 道路车辆—电气和电子设备环境条件和试验-第1部分:总则 ISO 16750.2-2003 道路车辆—电气和电子设备环境条件和试验-第2部分:电气负荷 ISO 10605:2008 道路车辆静电放电产生的电骚扰试验方法 ISO 7637-2:2004 道路车辆有传导和耦合引起的电骚扰第2部分:沿电源线的电瞬态传导 ISO 11452-2:2004 道路车辆窄带辐射电磁能引起的电骚扰的零部件试验方法第2部分:电波暗室 ISO 11452-4:2004 道路车辆窄带辐射电磁能引起的电骚扰的零部件试验方法第4部分:大电流注入 GB/T 4724 印制电路用覆铜箔环氧纸层压板 GB/T 4725 印制电路用覆铜箔环氧玻璃布层压板 GB/T 13556 印制电路用挠性覆铜箔聚脂薄膜