2008数学建模论文

数码相机定位
摘要:本文主要研究的是采用数码相机进行双目定位过程中有关系统标定的问题。即对物体的某个特征点,用两部固定于不同位置的数码相机摄得物体的像,根据该特征点在两个像坐标系里的坐标和两部相机的相对位置来确定特征点的位置。
第一步,论文考虑单个固定相机摄像问题。首先,通过对图像数据处理和分析,文章对靶标和所摄得的像分别在各自的平面内建立独立的坐标系。考虑影响相机拍摄效果的各个因素,诸如相机与靶标的距离、相机的光学平面与靶标的夹角(空间上可分为三个方向的偏角)、相机透镜自身的放大率、焦距、像距、对光线折射的畸变等,再根据单个固定相机的特殊性,本文提出了一种二维图像测定系统标定的方法,给出了两个坐标系图像相应点的非线性函数对应关系。
第二步,利用上述得到的函数关系,计算若干特征点对应像平面上的位置(坐标值)。利用计算机对图像数据进行分析处理,采用网格式平行线和特征交线标定法,选取特殊点,并利用这些点的位置数据评定上述模型的精度和稳定性。分析表明,该模型对单个固定相机拍摄所得的靶标特征点在像平面上的位置预测是可行的。利用该模型对原始靶标进行在像平面的投影变换,其所得到的像基本与单个固定相机所拍摄的像相重合。
最后,考虑两个相机的定位问题。论文在二维图像测定系统标定的基础上,将上述的模型推广到三维立体空间坐标系。为了问题的求解,本文以靶标的中心为原点建立世界坐标系,将两个相机中的像平面坐标都转换为世界坐标系中的坐标。这样,两个相机的位置参数就可以用同一个坐标系(世界坐标系)来度量,从而建立了求解两个相机相对位置的数学模型和方法。
总之,本文根据实际问题情况,建立了在数码相机进行双目定位过程中的系统标定问题。给出了单个相机摄像的二维图像测定系统标定模型和两个相机摄像的空间定位模型。模型简单实用,易于理解,具有很好的测定精度和稳定性。
关键字:系统标定轴偏变换旋转变换平移变换径向畸变换非线性拟合精度评价稳定性分析相对位置
一、问题的重述:
数码相机定位在交通监管(电子警察)等方面有广泛的应用。其中最常用的定位方法就是双目定位,也就是用两部相机来定位。对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
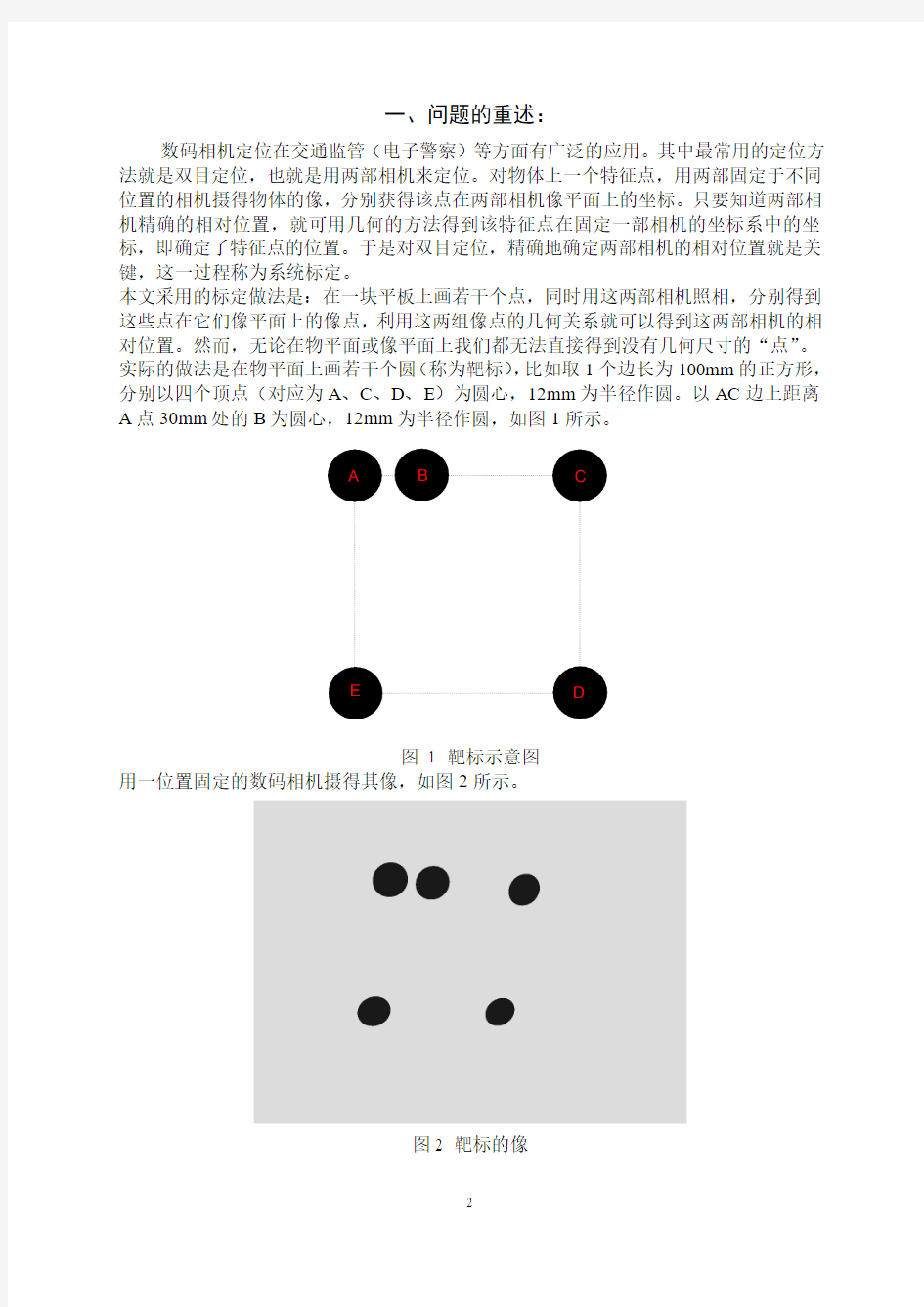
本文采用的标定做法是:在一块平板上画若干个点,同时用这两部相机照相,分别得到这些点在它们像平面上的像点,利用这两组像点的几何关系就可以得到这两部相机的相对位置。然而,无论在物平面或像平面上我们都无法直接得到没有几何尺寸的“点”。实际的做法是在物平面上画若干个圆(称为靶标),比如取1个边长为100mm的正方形,分别以四个顶点(对应为A、C、D、E)为圆心,12mm为半径作圆。以AC边上距离A点30mm处的B为圆心,12mm为半径作圆,如图1所示。
图 1 靶标示意图
用一位置固定的数码相机摄得其像,如图2所示。
图2 靶标的像
根据上提示可以解决解决以下的问题:
(1)建立数学模型和算法以确定靶标上圆的圆心在该相机像平面的像坐标, 这里坐标系原点取在该相机的光学中心,x-y平面平行于像平面;
(2)对由图2、图3分别给出的靶标及其像,计算靶标上圆的圆心在像平面上的像坐标, 该相机的像距(即光学中心到像平面的距离)是1577个像素单位(1毫米约为3.78个像素单位),相机分辨率为1024×768;
(3)设计一种方法检验你们的模型,并对方法的精度和稳定性进行讨论;
(4)建立用此靶标给出两部固定相机相对位置的数学模型和方法。
二、模型的假设及符号说明
2.1符号的说明
X:靶标上特征点的横坐标(所在坐标系);
Y:靶标上特征点的纵坐标(所在坐标系);
Z:靶标上特征点的竖坐标(所在坐标系);
X:靶标上点的像的横坐标(所在坐标系);
Y:靶标上点的像的纵坐标(所在坐标系);
Z:靶标上点的像的竖坐标(所在坐标系);
X:横向平移变换量;
Y:纵向平移变换量;
Z:竖向平移变换量;
M:光学系统的放大倍数;
?:主光轴旋转角(用于二维空间);
θ:主光轴轴偏角(用于二维空间);
α:相机透镜横向偏角(用于三维空间);
β:相机透镜纵向偏角(用于三维空间);
γ:相机透镜竖向偏角(用于三维空间);
k:透镜的径向畸变系数;
r:图像中心点到相机透镜中心的距离;
s:像素单位;
.3
=。
78
C:距离单位mm对像素的当量,即mm
s
C/
2.2 基本假设
为了问题的描述和模型的建立,本文对题目做了如下假设:
1.相机透镜是均匀的凸透镜,只考虑透镜的径向畸变因素;
2.透镜所成像即数码相机得到的像,不考虑透镜光学所成像与相机内所存储的数字图
像的差异;
3.靶标的位置是固定的;
4.相机与标靶的相对距离要大于像距,但具有可比性;
5.不考虑在计算机对图像数据进行处理时造成的数据误差。
三、模型的建立与问题的分析
3.1 图形数据的预处理
本工作的主要用途是将题目所给图像存入计算机,转化为计算机可以识别的图像数据,同时对图像数据进行处理得到靶标上特征点对应的像平面的位置表示。
题目所给图像数据在计算机上的存储为是三维的BRG格式。我们为了建立原靶标上的各个点与相机所得像上坐标的对应关系,首先得寻找几个特征点,同时得到这些特征点在图像上的位置表示,这样才能利用这些初始数据建立标靶坐标与所成像坐标的对应关系。
这些特征点对应像平面上的图形中心。本文确定这些像的中心点位置采用的工作主要分为下面几个步骤:
1.加载图形,得到灰度图形数据;
采用imread()函数,得到BRG格式的数据,数据量大。为了降低之后数据处理的不便,将其转换为颜色格式只有一维的灰度图形格式,数据分布在0到255之间。
2.确定图像阈值,标定图像边界,得到标靶特征区域对应像的范围;
由于最初的图形数据中图像的颜色灰度分布是阶梯分布,从0到255渐进变化,尤其是图形边界附近的像的灰度值更是如此。要确定图形的中心,首先就要确定图形的边界,这样才能确定整个图形的形状,才能确定中心点,即标靶特征点在像平面上的位置表示。
由于本文所研究图像并不复杂,图像边界的色度变化速度比较快。所以文章在设定图像阈值时,选取了灰度值的中值,即122。简化了确定图像边界点的难度,但也一定程度上可能会对某些图像的中心发生偏离。
3.求得中心点位置。
确定图像区域之后,将像平面上所有点上对应的像的灰度值二值化。即将所有图形区域内的点的灰度值设为255(纯白色),而将区域外点对应的灰度值设为0(纯黑色)。这样做的目的:一是增加图像对比度,突出目标区域;二是利用MA TLAB图像工具箱中分析图像的图形工具regionprops()函数(该程序针对白色图形区域)。
为了求得五个特征区域的像的中心,本文对最初的数据进行了分割,利用搜索算法得到分割点坐标,使五个特征图像完全分割为五个独立的子图像。整个过程的实现详见附件一的程序。这样就可以我们所要的位置坐标。
3.2 问题一:坐标转换模型的建立
正如前面所说的,影响相机图像拍摄效果的因素有很多。从三维空间角度考虑,有标靶的位置因素,相机的位置因素,也就是标靶和相机之间的相对距离;从相机的拍摄角度考虑,有相机的主光轴于相机透镜所在平面(与像平面平行)与标靶所处平面和中轴线所成的角度因素,这里包括横向、纵向和竖向的偏离角;从相机本身的光学特性来说,会涉及到相机的放大率(与透镜的折射率相关)、透镜对光线折射的畸变、焦距和
像距等多方面的因素。
问题一考虑单个固定的相机成像,上述众多因素对于同一次拍摄而言并不会影响到所研究的各个特征点在相机中相对位置。考虑我们得到的是一个二维平面图像,我们分别对标靶所在平面和像平面建立独立的坐标系,记为Y X -坐标系和Y X -坐标系,坐标系中心分别为标靶中心和像平面中心,单位长度均为像素s 。当相机固定位置以后,影响标靶特征点在图像坐标系位置的因素就可以进行简化。此时,像平面与标靶平面所成的角度关系,是可以简化,利用二维角度来表示,他们分别为像平面的中心主轴和标靶平面的中心轴的偏角,即轴偏角θ和像平面相对于标靶平面的旋转角?。这样我们把问题做如下处理:
1. 考虑相机光学系统的放大倍数为M ,根据成像关系可得到Y X -坐标系的一个
变换,记为S S Y X -坐标系:
MX X S = MY
Y S =
2. 轴偏变换
由于相机的像平面的水平与标靶的垂直方向不一定垂直,存在一个轴偏角,故我们可以对S S Y X -坐标系进行进一步的轴偏变换,得到的变换结果记为
θ
sin s s
w
Y X
X
-=
θ
cos s w Y Y =
即
θ
sin MY MX X
w
-=
θ
cos MY Y w =
3. 旋转变换
在轴偏变换的基础上,对图像进行平面旋转,得到新的变换结果记为
?
?sin cos w w
D
Y X
X
-=
?
?cos sin w w
D Y X
Y +=
即 ?θ?θsin cos cos )sin (MY MY MX X D --=
)sin cos cos (sin cos ?θ?θ?+-=MY MX
)sin sin cos (cos sin θ?θ??-+=MY MX Y D
得到 )sin(cos θ??++=MY MX X D
)cos(sin θ??++=MY MX Y D
4. 平移变换
由于相机主轴与标靶平面的非垂直型,会造成图像的一个平移量,记为
0)sin(cos X MY MX X t +++=θ??
0)cos(sin Y MY MX Y t +++=θ??
5. 径向畸变换
考虑摄像机透镜的径向畸变因素,将理想图像坐标(,)t t X Y 转换成实际图像坐标
(,)X Y :
02
2
2
2
1cos sin()1111t X M M X X X Y kr kr
kr kr ??θ+==+
+
++++
22221sin cos()
1111t Y M M Y Y X Y kr
kr
kr
kr
??θ+=
=
+
+
++++
其中r 整个图像的变换过程可以简单的用示意图3表示为
图3 单个固定相机成像图
由于相机位置已定,其中的参数值不会再随特征点位置变换而变换,于是我们可以做下面的简记
?cos 1M a =;)sin(2θ?+=M a ; ?sin 1M b =; )cos(2θ?+=M b
其中角度可由11
tan b a ?=
,sin θ=
从而得到最终问题一的数学模型为
()()2
2
1
2
1k X Y X a X a Y X ++=++ (一)
()()22
1
2
1k X
Y
Y a X a Y Y ++=++
可见,靶标上特征点到像平面的转换模型是一个三次的非线性方程组形式。 下面我们对模型进行求解
为了得到模型一中未知参数的值,首先要利用初始数据进行拟合求解。在靶标所在
在数据的预处理中得到的对应特征点在像平面内的像坐标如下表2所示(单位:像
在对模型一非线性曲线进行拟合计算时,,,,X Y X Y 均为已知,此时要确定模型中未
知参数,则相当于求解一个三维的线性方程组,即一个关于未知参数的线性回归模型,其中未知参数为1a ,2a ,1b , 2b ,0X ,0Y ,k .
(
)2
2
012X a X a Y k X
Y
X X ++-+=
(
)2
2
012Y b X b Y k X Y
Y Y ++-+=
求解该模型可以采用最小二乘法来拟合,记 E=[ 0a 1a 2a k 0b 1b 2b ]T
12A=.....n A A A ????????????
,B=??
??
??
??????n B B
B ....21,()()2
2
22
100000
1
i X Y X
Y X A X
Y
Y
X
Y ??
+??
=??
+??
?
?
,i X B Y ??=???? 利用最小二乘法得到的方程的解为 E=()B A A A T T 1
-
代入数据,利用附件中程序,可得到解为
E=[-48.637 0.77274 0.11458 -9.3202e-007 11.426 0.037826 -0.76502]T 于是,最后问题一的数学模型为
()()
2222
-48.6370.772740.11458+9.3202e-00711.4260.037826-0.76502+9.3202e-007X Y X Y X X
X Y X Y Y Y ?+++=?
??++=?
由于实际图像的分辨率为1024?768,并且图像的坐标系中心为图像中心,所以模型解空间[][]512:512384:384-?-,同时因为数据在计算机存储点均为整数,所以最终求解时可取近似整数解。
3.3 问题二:利用模型求特征点坐标
在上文中,我们通过最小二乘拟合的方法得到了模型一的具体表达式。但是当用模型一求解靶标某个特征点在对应像平面的位置时,需要解决的方程是一个非线性的方程组,我们可以借助于MATLAB 软件中的函数命令,对不同的初坐标进行非线性方程组求解。
首先在原标靶平面内所求特征点的坐标依旧是如表1所示。 求A 点为例,其求解具体程序为
S=solve('(1-9.3202e-007*(x^2+y^2))*x=-48.637-0.77274*48*3.78+0.11458*50*3.78','(1-9.3202e-007*(x^2+y^2))*y=11.426-0.037826*48*3.78-0.76502*50*3.78');
选取满足题目要求的解,并取近似整数,得到该点在图像平面上的点的坐标为
()-176,147A
同样的,最终通过模型求得靶标上所有特征点在相机像平面的像坐标的估计值如下表3
5%以下,这在工程应用和实际生活中是可容许的。同时偏差的方差为4.4307,也是一个比较合适的数值。可见该模型对预测数据的准确性。
3.4 问题三:模型的精度和稳定性分析
在上一节中,我们通过利用模型一得到的四个特征点在像平面上的坐标已经对模型的预测精度有一定的认识。本节中我们将引入网格式平行线和特征交线标定法对模型精度进行进一步的分析,同时结合差分,分析模型一的稳定性。
影响模型预测精度的因素主要来源于以下三个方面:
一是在第一节中计算机对图像数据预处理的过程,采用图像学知识确定各特征区域所成图像的边界,从而确定图像的中心。由于确定图像边界阈值的选取标准不同,就会会对图像中心位置的确定产生偏差,也就是对特征点在像平面的坐标产生偏差。
二是在模型参数确定过程中取点数量和质量对拟合效果的影响。
三是由于计算机在存储图像数据时以整点的像素为单位,不存在小数,致使在坐标计算是需要对计算结果进行取整运算,从而为模型的解带来一定偏差。
我们这里模型的精度主要分析由第二点造成的精度问题。我们要提高这方面的精度,主要是增大有效数据量。为了然增加的数据具有代表性,采用网格式平行线和特征交线标定法,它主要是利用平行线和特殊特征曲线来取点验证模型的估计精度。
网格式平行线法是充分利用在原标靶平面内各条水平或垂直的线上的特征点的坐标,通过在各条水平或垂直的线上提取额外的特征点,一起来参与模型一的拟合修正,来验证模型的精度。特殊特征曲线取点是利用特征曲线交点,比如标靶平面内各个原数据点连线所成直线的交点。通过测定这些具有鲜明特点的数据来验证模型拟合的精度。
通过取样,可以扩充特征点数据为
特征点在图像中的坐标对应关系。
反映模型拟合精度的另外一个更形象的方法就是利用模型对标靶图形进行图像重构,也就是通过模型计算原标靶特征点周围圆形区域在像平面上所成的图像。该图像与原图像进行比较,看图像的重合程度。具体情况见图4和图5。其中实体的图像是原图像,虚体的图像为通过模型重构的图像。
从图中我们可以看出来,对于原图像和由模型拟合重构的图像基本上偏差并不大。尤其是平面左上方的图像,两个图形基本是重合的。
图4 利用模型求解所得图像(虚像)和原像的重合效果图(整体)
图5 利用模型求解所得图像(虚像)和原像的重合效果图(部分)
图4和图5不仅说明了模型的估计精度,还可以说明模型的稳定性。因为当数据在变动时,整个图像并没有发生大的偏差。为了进一步说明模型的稳定性,我们从理论上对模型做差分,利用变量的变化规律来解释。
我们综合考虑模型一的求解拟合过程。在模型一中,显然,当(,)(0,0)X Y ??→时,我们是可以认为2
2
2
r X Y
=+不变
02
2
2
02
2
2cos sin()111sin cos()
111X M M X X Y kr kr kr Y M M Y X Y kr
kr
kr
ααθα
αθ+=++++++=
+
+
+++
两边取微分,可得:
2
2
2
2
cos sin()11sin cos()
11M M d X dX dY
kr kr M M d Y dX dY
kr
kr
ααθα
αθ+=++++=
+
++
即
2222cos sin()11sin cos()11M M d X dX kr kr M M dY d Y
kr
kr ααθααθ+??
????????++??
=?
?????+?
???????????++??
此线性方程组的系数矩阵的行列式为:
22
2
2
2
2
2
cos sin()11cos(2)sin cos()
(1)
11M M M
kr kr M M kr kr
kr
ααθαθα
αθ+++=
+++++
由于α和θ的角度都非常小,故cos()0αθ+≠,则此线性方程组的系数矩阵的行列式不等于0。因此,当0d X →,0d Y →时,有0dX →,0dY →。从而可以说此模型是稳定的。
问题四:双相机定位模型
在实际应用中,我们用两个相机对实物进行定位,该过程主要是要确定相机内部的几何及光学特性和相机坐标系相对于世界坐标系(以标靶为中心建立的坐标系)的三维位置和方向。我们要解决的主要问题是确定两个相机间的相对位置。为此,我们必须建立两个相机的平面坐标系相对于世界坐标系的对应关系,从而在统一的一个坐标系中得到两个相机的位置变量,建立双相机的定位模型。
和二维图像的标定模型相类似,我们也是考虑在理想的透镜成像基础上加入透镜的径向畸变因素。其示意图为图6所示:
图6 双相机成像示意图
图中(,,)W W W X Y Z 是物体表面上的某一点P 在三维世界坐标系W W W O X Y Z 中的三维坐标。l l l l o x y z 和r r r r o x y z 分别为左右相机的坐标系,坐标中心l O 和r O 分别为左右相机的光学中心,l z 和r z 分别为左右相机的光轴重合。由于相机所得像总是二维平面的,所以标记il l l O X Y 和ir r r O X Y 分别为左右相机成像平面上的图像坐标系。图像中心il O 为光轴l z 与左相机图像平面的交点,图像中ir O 为光轴r z 与右相机成像平面的交点,l X 和l Y 轴分别与右摄像机坐标系的r x 和r y 轴平行。cl l l o u v 和cr r r o u v 分别为左右相机的成像在计算机中
(帧存)的图像坐标系,采集到的图像在计算机帧存中的坐标单位以像素表示。(),u u X Y 是P 点在理想的透镜下的图像坐标。(),d d X Y 是P 点因透镜径向变形而偏离了理想图像位置的位置。有效焦距f 是光学中心到图像平面的距离。
通过上面的示意图和在二维图像标定模型的处理方法,我们可以进行下面的计算处理。
首先以左相机的成像过程为例,针对我们具体的问题,以标靶中心为原点,建立物体、相机和图像的三维世界坐标,某特征点坐标记为(,,)X Y Z 。变换到计算机图像平面坐标(,)u v 的步骤如下:
(1)从物体三维世界坐标(,,)X Y Z 到相机三维坐标(,,)l l l x y z 的三维空间刚体位置变换:
l l l l l x X y R Y T Z z ????????
=?+????????????
其中l R 为33?的正交旋转变换矩阵,l T 为31?的平衡矢量。l R 确定了相机相对于世界坐标系的方向,它的矩阵元素可由三个欧拉角γ,β和α来表示,分别代表了相机相对于坐标原点的竖向、纵向和横向的偏折角度。
11121321
222331
32
33l r r r R r r r r r r ??
??=??????
其矩阵元素表示为:
11cos cos r αβ
=,21sin cos r αβ=-,31sin r β=,12sin cos cos sin sin r αγαβγ=+,
22cos cos sin sin sin r αγαβγ
=-, 32cos sin r βγ=-,13sin sin cos sin cos r αγαβγ=-,
23cos sin sin sin cos r αγαβγ=+ ,33cos cos r βγ= 平移矢量T
l x
y
z T T T T ??=??
,则表明了摄像机相对于世界坐标系的位置关系。该映射对
应了二维图像标定中的偏折变换、旋转变换和平移变换。
(2) 相机的图像始终是平面的,则相机三维坐标(,,)l l l x y z 在理想的透镜成像模型下经投影变换到图像坐标(,)u u X Y 上为
l u l l u l
x X f z x Y f
z ==
(3) 考虑相机透镜的径向畸变因素,将理想图像坐标(,)u u X Y 转换成实际图像坐标
(,)l l X Y :
2
1
21
(1)(1)
l u l u X X kr Y Y kr --=+=+
其中r =
i O 到实际图像坐标(,)l l X Y 的距离;k 表示透镜径
向畸变系数。
综合上述变换,我们可以建立世界坐标系中标靶特征点坐标与其在左相机中所成像的位置坐标这二者之间的关系:
2
11121331323321
22232313233(1)(1)x l z y l
z r X r Y r Z T kr X f r X r Y r Z T r X r Y r Z T kr Y f r X r Y r Z T +++?+=?+++?
?
+++?+=?+++?
(二) 参考模型一的建立过程,我们同样可以建立单个相机在世界坐标系下的关于物体点与其像对应的转换模型,也就是上面的对应关系,记为模型二。
模型二同样是一个非线性的方程组,其中模型的参数可以通过数据拟合来得到。当参数为已知后,我们就可以利用其中参数确定相机在世界坐标系中的位置T
l x
y
z T T T T ??=??
。
同理,对于右相机也有相同的结果。同样可以通过建立世界坐标系中标靶特征点坐标与右相机所成像位置关系,确定参数,从而得到右相机在世界坐标系中的位置。
对右相机而言,记从物体三维世界坐标(,,)X Y Z 到相机三维坐标(,,)r r r x y z 的三维空间刚体位置变换
r r r r r x X y R Y T Z z ????????
=?+????????????
其中同样的,r R 为33?的正交旋转变换矩阵,r T 为31?的平衡矢量。r R 确定了相机相对于世界坐标系的方向,它的矩阵元素可由三个欧拉角'γ,'β和'α来表示,分别代表了相机相对于坐标原点的竖向、纵向和横向的偏折角度。
111213212223313233'
'''
'''
'
'l r r r R r r r r r r ??
??=??????
其中'ij r 形式与左相机类似。而'''T
r x y z T T T T ?
?=??
同样的经过投影变换和径向畸变换,最终得到右相机中像与其对应物点的函数关系
2
11121331323321
22232313233''''(1)''''''''
(1)''''x r z y r
z r X r Y r Z T kr X f r X r Y r Z T r X r Y r Z T kr Y f r X r Y r Z T +++?+=?+++?
?
+++?+=?+++?
于是可以通过数据拟合得到其中各个参数的值,也就得到了右相机相对于世界坐标
系的方向'''T
r x y z T T T T ??=??。在同一个坐标系有了两个物体的绝对坐标,便很统一得
到两相机的相对位置。
综合上面叙述,最后设两相机的相对位置向量为(),,X Y Z (左相机相对右相机),整理得到利用标靶求出两部固定相机相对位置的数学模型:
2
11121331323321222323132332
1112133132332122232313233(1)(1)''''(1)''''''''(1)''''
(x l z y l z
x r z y r z r X r Y r Z T kr X f r X r Y r Z T r X r Y r Z T kr Y f r X r Y r Z T r X r Y r Z T kr X f r X r Y r Z T r X r Y r Z T kr Y f r X r Y r Z T X Y
Z ++++=+++++++=+++++++=+++++++=+++())'
'
'T
T
T
l r x
y
z x y z T T T T T T T T ????????????????=-=-??
?
(三)
其中符号如前面所示。
四、模型的改进、评价、推广
从上述对模型的研究看,该模型是一个精度很高且具有良好稳定性。利用该模型对标靶点进行图像重塑,可以基本和原图像相差无几。尤其是位于标靶左上方的特征点,该模型对这些区域重构的图像基本和原图像重合。 但是从整体的重构图像看,还是有相当一部分的点的像与原图像发生偏折,使得图像出现重影。这应该和模型一参数确定的过程是密不可分的。一是在整个过程中使用了存在误差的图像中心点坐标,令一方面用来做拟合的数据量只有五个,比起模型的六个未知参数来,数量还很是不足,这就造成了拟合出来的图像在一些地方发生了误差。
为此,我们应该建立更好的图像边界提取算法,使得图像边界归属更加明确,也就使得用于拟合的数据更加精确;再者,利用网格平行线和垂直平行线,建立更多网格特征交点,使得用于拟合的数据更充分,这样就能更大可能的保证了模型的稳定性。
用相机进行双目定位,该方法采用无接触式测量,结构简单、设备成本低、数据采集迅速,操作方便。该模型除了可以用于对物体的定位,同时也还可以用于工程和人体的测量、质量的控制等方面,具有广阔的发展空间。
参考文献:
[1] 王建民等,一种新的二维图像测量系统标定方法,哈尔滨工业大学学报,V ol.32,No.3,37-41,2006年。
[2] 罗万成,大学生数学建模案例精选,成都,西南交通大学出版社,2007年。
[3] 戴朝寿等,数学建模简明教程,北京,高等教育出版社,2007年。
[4] 江世宏,MA TLAB语言与数学实验,北京,科学出版社,2007年。
[5] 张可,基于改进遗传算法的立体视觉系统标定,计算机工程与应用,1-4,2006年。
[6] 李瑛等,基于投影变换的图像测量系统标定,传感器与微系统,77-80,2006年。
[7] 廖士中等,一种光学镜头摄像机图象几何畸变的修正方法,中国图象图形学报,593-596,2000年
附件:
程序1
N=5;
Image_data=imread('xiang.bmp');
%图像的二值化
I=Image_data;
for i=1:768
for j=1:1024
if Image_data(i,j,:)>=125
I(i,j,:)=255;
else
I(i,j,:)=0;
end
end
end
imshow(I);
%图像边缘点
n=0;
k=0;
for i=1:768
for j=1:1024
while ( I(i,j,:)==0 & I(i,j-1,:)~= 0 ) k=k+1;
circle_side.num(1,k)=n;
circle_side.x_label(1,k)=i;
circle_side.y_label(1,k)=j;
end
end
end
程序2
%切割图像平面,得到切割点
Image_datas=imread('xiang.bmp');
Image_data=rgb2gray(Image_datas);
imshow(Image_data)
[m,n]=size(Image_data);
for i=1:m
for j=1:n
if Image_data(i,j)>125
Image_data(i,j)=0;
else
Image_data(i,j)=255;
end
end
end
k=0;
for i=1:m-1
if ( max( Image_data(i,:) )==255 & max( Image_data(i+1,:) )~=255 ) k=k+1;
x=i
end
end
k=0;
for j=1:n-1
if (max( Image_data(:,j) )==255 & max( Image_data(:,j+1) )~=255) k=k+1;
y=j
end
end
程序3
%求切割平面后图像中心,针对A图像
Image_data=imread('cirl1.bmp');
[m,n,z]=size(Image_data);
for i=1:m
for j=1:n
if Image_data(i,j,:)>125
Image_data(i,j,:)=0;
else
Image_data(i,j,:)=255;
end
end
end
Image_binary=rgb2gray(Image_data);
imshow(Image_binary)
%Image_binary=im2bw(Image_binary,[level]);
Image_binary1=dither(Image_binary);
L = bwlabel(Image_binary1);
STATS = regionprops(L,'Centroid')
STATS(1).Centroid
程序4
%模型参数求解
clear
x=[-50,-20,50,-50,50];
y=[50,50,50,-50,-50];
X=[323 424 641 285 584];
Y=[189 197 213 503 504];
X=X-1024/2;
Y=Y-678/2;
x=x.*3.78;
y=y.*3.78;
A=zeros(10,7);
for i=1:5
A(i,1)=1;
A(i,2)=x(i);
A(i,3)=y(i);
% A(i,4)=-(X(i).^2+Y(i).^2)*X(i);
end
for i=6:10
% A(i,4)=-(X(i-5).^2+Y(i-5).^2)*Y(i-5);
A(i,5)=1;
A(i,6)=x(i-5);
A(i,7)=y(i-5);
end
B=[X';Y'];
E=A\B;
A
result=A*E
result=[result(1:5)+1024/2;result(6:10)+678/2];
程序5
%扩充特征点集
clear
Image_datas=imread('xiang.bmp');
Image_data=rgb2gray(Image_datas);
Image_data=Image_data';
X=[323,424,641,285,584];
Y=[189,197,213,503,504];
for i=1:5
for j=X(i):1024
if Image_data(j,Y(1))>=125
X=[X j];
Y=[Y Y(1)];
break
end
end
end
程序6
S=solve('(1-9.3202e-007*(x^2+y^2))*x=-48.637-0.77274*50*3.78+0.11458*50*3.7 8','(1-9.3202e-007*(x^2+y^2))*y=11.426-0.037826*50*3.78-0.76502*50*3.78') S.x
S.y
程序7
%利用模型,重构函数图像
Image_datas=imread('xiang.bmp');
Image_data=rgb2gray(Image_datas);
%imshow(Image_data);
%Image_data=255;
for i=-62:62
for j=-62:62
if ((((i+50)^2+(j-50)^2)-144)<=4 | (((i+50)^2+(j+50)^2)-144)<=4 | (((i-50)^2+(j-50)^2)-144)<=4 | (((i-50)^2+(j+50)^2)-144)<=4
|(((i+38)^2+(j-50)^2)-144)<=4)
m=E(2)*i*3.78+E(3)*j*3.78+E(1);
% 1/(1+E(4)*((i*3.78)^2+(j*3.78)^2))*
n=E(5)*i*3.78+E(6)*j*3.78+E(4);
m=m+1024/2;
n=n+678/2;
if (((i+38)^2+(j-50)^2)-144)<=4
Image_data(fix(n),fix(m)+50)=0;
else
Image_data(fix(n),fix(m))=0;
end
end
end
end
imshow(Image_data)
figure (2)
imshow(Image_datas)
埃博拉病毒的根除数学建模论文
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
数学建模国家一等奖优秀论文
2014高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。 我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。 我们参赛选择的题号是(从A/B/C/D中选择一项填写):B 我们的报名参赛队号为(8位数字组成的编号): 所属学校(请填写完整的全名): 参赛队员(打印并签名) :1. 2. 3.
指导教师或指导教师组负责人(打印并签名): ?(论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。以上内容请仔细核对,提交后将不再允许做任何修改。如填写错误,论文可能被取消评奖资格。) 日期: 2014 年 9 月15日 赛区评阅编号(由赛区组委会评阅前进行编号):
2014高教社杯全国大学生数学建模竞赛 编号专用页 赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):
2013全国数学建模大赛a题优秀论文
车道被占用对城市道路通行能力的影响 摘要 随着城市化进程加快,城市车辆数的增加,致使道路的占用现象日益严重,同时也导致了更多交通事故的发生。而交通事故发生过程中,路边停车、占道施工、交通流密增大等因素直接导致车道被占用,进而影响了城市道路的通行能力。本文在视频提供的背景下通过数据采集,利用数据插值拟合、差异对比、车流波动理论等对这一影响进行了分析,具体如下: 针对问题一,首先根据视频1中交通事故前后道路通行情况的变化过程运用物理观察测量类比法、数学控制变量法提取描述变量(如事故横断面处的车流量、车流速度以及车流密度)的数据,从而通过研究各变量的变化,来分析其对通行能力的影响。而视频1中有一些时间断层,我们可根据现有的数据先用统计回归对各变量数据插值后再进行拟合,拟合过程中利用残差计算值的大小来选择较好的模型来反应各变量与事故持续时间的关系,进而更好地说明事故发生至撤离期间,事故所处横断面实际通行能力的变化过程。 针对问题二:沿用问题一中的方法,对视频2中影响通行能力的各个变量进行数据采集,同样使用matlab对时间断层处进行插值拟合处理,再将所得到的的变化图像与题一中各变量的变化趋势进行对比分析,其中考虑到两视频的时间段与两视频的事故时长不同,从而采用多种对比方式(如以事故发生前、中、后三时段比较差值、以事故相同持续时间进行对比、以整个事故时间段按比例分配时间进行对比)来更好地说明这一差异。由于小区口的位置不同、时间段是否处于车流高峰期以及1、2、3道车流比例不同等因素的影响,采用不同的数据采集方式使采集的变量数据的实用性更强,从而最后得到视频1中的道路被占用影响程度高于视频2中的影响程度,再者从差异图像的变化波动中得到验证,使其合理性更强。 针对问题三:运用问题1、2中三个变量与持续时间的关系作为纽带,再根据附件5中的信号相位确定出车流量的测量周期为一分钟,测量出上游车流量随时间的变化情况,而事故横断面实际通行能力与持续时间的关系已在1、2问中由拟合得到,所以再根据波动理论预测道路异常下车辆长度模型的结论,结合采集数据得到的函数关系建立数学模型,最后得出事故发生后,车辆排队长度与事故横断面实际通行能力、事故持续时间以及路段上游车流量这三者之间的关系式。 针对问题四:在问题3建立的模型下,利用问题4中提供的变量数据推导出其它相关变量值,然后代入模型,估算出时间长度,以此检验模型的操作性及可靠性。 关键词:通行能力车流波动理论车流量车流速度车流密度
数学建模论文标准格式
数学建模论文标准格式 为了适应数学发展的潮流和未来社会人才培养的需要,美国、德国、日本等发达国家普遍都十分重视数学建模教学。以下是小编整理的数学建模论文标准格式,欢迎阅读。 1.数学建模简介 1985年,数学建模竞赛首先在美国举办,并在高等院校广泛开设相关课程。我国在1992年成功举办了首届大学生数学竞赛,并从1994年起,国家教委正式将其列为全国大学生的四项竞赛之一。数学建模是分为国内和国外竞赛两种,每年举行一次。三人为一队,成员各司其职:一个有扎实的数学功底,再者精于算法的实践,最后一个是拥有较好的文采。数学建模是运用数学的语言和工具,对实际问题的相关信息(现象、数据等)加以翻译、归纳的产物。数学模型经过演绎、求解和推断,运用数学知识去分析、预测、控制,再通过翻译和解释,返回到实际问题中[1]。数学建模培养了学生运用所学知识处理实际问题的能力,竞赛期间,对指导教师的综合能力提出了更高的要求。 2.数学建模科技论文撰写对学生个人能力成长的帮助 2.1.提供给学生主动学习的空间 在当今知识经济时代,知识的传播和更新速度飞快,推行素质教育是根本目标,授人与鱼不如授人与渔。学生掌握自学能力,能有效的弥补在课堂上学得的有限知识的不足。数学建模所涉及到的知识面广,除问题相关领域知识外,还要求学生掌握如数理统计、最优化、
图论、微分方程、计算方法、神经网络、层次分析法、模糊数学、数学软件包的使用等。多元的学科领域、灵活多变的技能方法是学生从未接触过的,并且也不可能在短时间内由老师一一的讲解清楚,势必会促使学生通过自学、探讨的方式来将其研懂。给出问题,让学生针对问题去广泛搜集资料,并将其中与问题有关的信息加以消化,化为己用,解决问题。这样的能力将对学生在今后的工作和科研受益匪浅[2]。 在培训期间,大部分学生会以为老师将把数学建模比赛所涉及到的知识全部传授给学生,学生只要在那里坐着听老师讲就能参加比赛拿到名次了。但是当得知竞赛主要由学生自学完成,老师只是起引导作用时,有部分学生选择了放弃。坚持下来的学生,他们感谢学校给与他们这样能够培养个人能力的机会,对他们今后受用匪浅! 2.2.体验撰写综合运用知识和方法解决实际问题这一系列论文的过程 学生在撰写数学建模科技论文的时候,不光要求学生具备一定的数学功底、有良好的计算机应用能力、还要求学生具备相关领域知识,从实际问题中提炼出关键信息,并运用所学知识对这些关键信息加以抽象、建立模型。这也是教师一直倡导学生对所学知识不光要记住,而且要会运用。千万不要读死书,死读书,读书死。 2.3.培养了学生的创新意识和实践能力 在撰写过程中潜移默化的培养了学生获取新知识、新技术、新方法的能力,并在解决实际问题的过程中培养学生的创新意识和实践能
数学建模论文格式要求
全国大学生数学建模竞赛论文格式规范 ●本科组参赛队从A、B题中任选一题,专科组参赛队从C、D题中任选一题。 ●论文用白色A4纸单面打印;上下左右各留出至少厘米的页边距;从左侧装 订。 ●论文第一页为承诺书,具体内容和格式见本规范第二页。 ●论文第二页为编号专用页,用于赛区和全国评阅前后对论文进行编号,具体 内容和格式见本规范第三页。 ●论文题目和摘要写在论文第三页上,从第四页开始是论文正文。 ●论文从第三页开始编写页码,页码必须位于每页页脚中部,用阿拉伯数字从 “1”开始连续编号。 ●论文不能有页眉,论文中不能有任何可能显示答题人身份的标志。 ●论文题目用三号黑体字、一级标题用四号黑体字,并居中;二级、三级标题 用小四号黑体字,左端对齐(不居中)。论文中其他汉字一律采用小四号宋体字,行距用单倍行距,打印时应尽量避免彩色打印。 ●提请大家注意:摘要应该是一份简明扼要的详细摘要(包括关键词),在整 篇论文评阅中占有重要权重,请认真书写(注意篇幅不能超过一页,且无需译成英文)。全国评阅时将首先根据摘要和论文整体结构及概貌对论文优劣进行初步筛选。 ●引用别人的成果或其他公开的资料(包括网上查到的资料) 必须按照规定的 参考文献的表述方式在正文引用处和参考文献中均明确列出。正文引用处用方括号标示参考文献的编号,如[1][3]等;引用书籍还必须指出页码。参考文献按正文中的引用次序列出,其中书籍的表述方式为: [编号] 作者,书名,出版地:出版社,出版年。 参考文献中期刊杂志论文的表述方式为: [编号] 作者,论文名,杂志名,卷期号:起止页码,出版年。 参考文献中网上资源的表述方式为: [编号] 作者,资源标题,网址,访问时间(年月日)。 ●在不违反本规范的前提下,各赛区可以对论文增加其他要求(如在本规范要 求的第一页前增加其他页和其他信息,或在论文的最后增加空白页等);从承诺书开始到论文正文结束前,各赛区不得有本规范外的其他要求(否则一律无效)。 ●本规范的解释权属于全国大学生数学建模竞赛组委会。 [注] 赛区评阅前将论文第一页取下保存,同时在第一页和第二页建立“赛区评阅编号”(由各赛区规定编号方式),“赛区评阅纪录”表格可供赛区评阅时使用(各赛区自行决定是否在评阅时使用该表格)。评阅后,赛区对送全国评阅的论文在第二页建立“全国统一编号”(编号方式由全国组委会规定,与去年格式相同),然后送全国评阅。论文第二页(编号页)由全国组委会评阅前取下保存,同时在第二页建立“全国评阅编号”。
全国数模竞赛优秀论文
一、基础知识 1.1 常见数学函数 如:输入x=[-4.85 -2.3 -0.2 1.3 4.56 6.75],则: ceil(x)= -4 -2 0 2 5 7 fix(x) = -4 -2 0 1 4 6 floor(x) = -5 -3 -1 1 4 6 round(x) = -5 -2 0 1 5 7 1.2 系统的在线帮助 1 help 命令: 1.当不知系统有何帮助内容时,可直接输入help以寻求帮助: >>help(回车) 2.当想了解某一主题的内容时,如输入: >> help syntax(了解Matlab的语法规定) 3.当想了解某一具体的函数或命令的帮助信息时,如输入: >> help sqrt (了解函数sqrt的相关信息)
2 lookfor命令 现需要完成某一具体操作,不知有何命令或函数可以完成,如输入: >> lookfor line (查找与直线、线性问题有关的函数) 1.3 常量与变量 系统的变量命名规则:变量名区分字母大小写;变量名必须以字母打头,其后可以是任意字母,数字,或下划线的组合。此外,系统内部预先定义了几个有特殊意 1 数值型向量(矩阵)的输入 1.任何矩阵(向量),可以直接按行方式 ...输入每个元素:同一行中的元素用逗号(,)或者用空格符来分隔;行与行之间用分号(;)分隔。所有元素处于一方括号([ ])内; 例1: >> Time = [11 12 1 2 3 4 5 6 7 8 9 10] >> X_Data = [2.32 3.43;4.37 5.98] 2 上面函数的具体用法,可以用帮助命令help得到。如:meshgrid(x,y) 输入x=[1 2 3 4]; y=[1 0 5]; [X,Y]=meshgrid(x, y),则 X = Y =
毕业论文:高铁票价的数学模型(数学建模)概况
毕业论文 题目:高铁票价的数学模型所在系: 专业: 学号: 作者: 指导教师: 年月日 高铁票价的数学模型
数学与计算科学系数学与应用数学专业 作者:学号:指导老师: 摘要:本文主要以京津城际高速铁路为依托,通过拉姆齐定价模型和高峰负荷定价法确定介于边际成本和盈亏平衡之间的最优票价。同时运用计量经济学的方法对京津城际高铁的票价需求弹性系数和运营成本做近似估计,并制定出京津城际高铁的票价运价率。最后再根据运价率求出武广高铁各路段的票价。 关键词:拉姆齐模型;高速铁路;票价 1 引言 1.1 国外研究现状 高速铁路作为新型运输产品,近几年在我国逐渐兴起。引起了大量学者的研究兴趣,目前有许多学者从不同角度对与高速铁路相关的问题进行了广泛而深入的研究,同时也取得了丰硕的研究成果。 []1对俄罗斯高铁的改革发展情况进行了相关研究,同时也分析了该国的铁路运价策略。晓凌[]2对日本的高铁旅客票价政策进行了深度分析。洋[]3在借鉴国外高铁运价机制基础上,分析影响高铁客运专线票价的影响因素,提出比较完备的客运专线票价决定策略体系。叶蓓[]5运用系统动力学方法对高速铁路票价优化模型进行了研究,将该模型应用到了京沪高速铁路的定价应中,求得了相应的最优票价。晓佳,友好[]6将有效性原理应用到京沪高铁的票价制定中,运用经济学中的有效性原理和运输通道客流量动态分配模型制定出京沪高速铁路的最优票价。高自友、四兵锋[]7将双层规划、灵敏度分析法等模型算法合理的运用到铁路票价领域。周龙[]4、常利,丽红[]8等在基于拉姆齐模型定价理论的基础上,利用拉姆齐高峰负荷定价法对地铁票价进行了深度研究,为本文研究高铁票价提供了思路。同时本文将借鉴拉姆齐定价模型来对高铁票价进行研究。 S.Proost等人从外部成本问题上分析了欧洲效能价格与运输价格的偏离程度,然后基于TRENEN模型提出一个包涵所有交通运输方式的最优定价模型[]9。 国外对于交通运输票价的研究相对较早,但因为各国高铁修建时间早晚不一,组织形式和采用的技术方法都不同,研究结果存在较大差异;我国高铁在最近几年才开始大量建设运营,无论是技术还是市场都还处于发展阶段,不确定性较大,国外的研究资料
数学建模论文格式及要求
数学建模论文的撰写 数学建模论文是注重实际应用的一类研究性论文, 是通过建立反映社会生产和生活中具有重要意义的现象的数学规律的模型, 并运用数学原理及计算机工具加以解决, 其结论或方法必须具有一定的独创性。 撰写数学建模论文和通常完成数学建模竞赛的答卷是类似的, 都是在完成了一个数学建模问题的全部过程后, 把所作的工作进行小结, 以有清楚定义的格式写出解法论文,用于交流或给有关部门、人员汇报。 事实上, 数学建模竞赛其中就包含了参赛人员写作能力的比试, 评比的主要标准除假设的合理性、建模的创造性、模型的数据和结论的可信性外, 还有一点就是文字表述的清晰程度。因此,下面简单谈谈建模论文的写作。 竞赛数学建模的论文评选标准主要是:
( 1) 假设的合理性; ( 2) 建模的创造性; ( 3) 结果的合理性; ( 4) 表述的清晰程度。 数学建模论文的结构: 一份完整的答卷应包含以下内容: 论文题目; 摘要; 问题的重述; 模型的假设、符号约定和名词解释; 模型的建立、模型的求解、模型的结果和检验; 模型的评价和改进; 参考文献; 附录。 论文题目 要能反映出该论文的实质, 简单明了、字数不宜过多。
摘要 一般为200~400 字; 其内容主要包括建模思想、模型特点、求解方法、主要结果等,其既要概括全文, 又要反映出本队的特点; 竞赛数学建模的论文摘要极为重要, 它是评委们首先看到的, 如果摘要写不好, 即使下面的内容写的再好也可能被提前淘汰。 摘要应具有独立性和自含性, 即只阅读摘要, 不阅读论文全文,就能获得必要的信息。摘要中要有数据、有结论, 是一篇完整的短文, 可以独立使用, 可以引用, 可以用于工艺推广。摘要的内容应包含与论文同等量的主要信息, 可供读者确定有无必要阅读全文, 也可供文摘等二次文献选用。摘要一般应说明研究工作的目的、实验方法, 结果和最终结论等, 重点是结果和结论。”对于大学生数学建模竞赛来讲, 由于是对同一个问题给出的解答, 为了使评阅人较快弄清作者的思路, 我们认为摘要还是尽可能详细一些为好。特别是应写清条件、结论、基本过程、关键步骤、要领、所采用的方法以及有
全国数学建模优秀论文
上海世博会影响力的定量评估 摘要 本文主要针对世博会对上海市的发展产生的影响力进行定量评估。 在模型一中,首先我们从上海的城市基础设施建设这一侧面定量评估世博会对上海市的发展产生的影响,而层次分析法是对社会经济系统进行系统分析的有力工具。所以我们运用层次分析法,构造成对比矩阵a,找到最大特征值 ,运用 进行一致性检验,这样对成对比矩阵a进行逐步修正,最终可以确定权向量。再运用模糊数学的综合评价法,通过组合权向量就可以得出召开世博会比没有召开世博会对上海城市基本设施建设的影响要高出40%。 在模型二中,上海世博会的影响力直接体现在GDP上,我们直接以GDP这个硬性直接指标来衡量上海世博会对上海的影响。因此我们运用线性回归的模型预测出在有无上海世博会这两者情况下的GDP的值,并将运用线性回归得到的数据与上海统计年鉴中的相关数据进行比较运算,算出误差在1.2%左右,这说明我们用线性回归得到的模型能准确地反映出世博会对上海GDP的影响。运用公式 可以计算出世博对上海GDP的影响力的大小为 。 关键词:层次分析法模糊数学线性回归城市基础建设 GDP 1 问题重述
2010年上海世博会是首次在中国举办的世界博览会。从1851年伦敦的“万国工业博览会”开始,世博会正日益成为各国人民交流历史文化、展示科技成果、体现合作精神、展望未来发展等的重要舞台。请你们选择感兴趣的某个侧面,建立数学模型,利用互联网数据,定量评估2010年上海世博会的影响力。 2 问题分析 对于模型一,为了定量评估2010年上海世博会的影响力,我们首先选取城市基础设施建设的投入这一个侧面,因为通过查找相关数据,我们发现,城市基础设施建设的投入在上海整个GDP的增长中占有很大的比重,对GDP的贡献占主体地位。而层次分析法是对社会经济系统进行系统分析的有力工具。为此,我们通过研究上海统计局的相关数据,使用层次分析法来评估世博会的召开对基础设施建设的投入的影响,目标层为世博会的召开对基础设施建设的投入的影响,准则层依次为电力建设、交通运输、邮电通信、公用事业、市政建设,方案层依次为没有召开世博时的影响、召开世博时的影响。首先我们通过层次分析法算出电力建设、交通运输、邮电通信、公用事业、市政建设的相对权重,然后应用模糊数学中的综合评价法对上海世博会对城市基础设施建设的影响作出综合的评价,应用综合评价法计算出没有召开世博和召开世博两种情况下的权重,从而得出上海世博会的召开对城市基础设施建设的影响。 对于模型二,直接以GDP这个硬性直接指标来衡量上海世博会对上海的影响。先根据上海没有申办世博会的GDP总额的相关数据,建立线性回归模型,由此预测不举办世博会情况下2010年上海市的GDP总额;再由2002年至2009年的GDP值用线性回归预测出举办世博会情况下2010年上海市的GDP总额,并将两种情况进行对比得出世博会对上海GDP的影响。 3 模型假设 3.1假设非典和奥运等重大事件对世博前的城市基础建设的投入影响很小,可以忽略。
投资地选择问题数学建模论文
关于投资地选择问题的论文 摘要:本文是以一道投资地选择的问题进行的数学模型的建立,该问题使用的是层次分析法进行模型建立和研究计算,并运用高等代数中特征值、特征向量的方法进行计算求解。该层次分析分为三层,包括目标层、决策层、准则层。其中准则层共有六项,根据重要性分别进行分析,最后得出结果。可以对于实际问题的选择给予一定的参考意见,但在实际问题的考虑中还要想到当地的政府政策、当地的资源等问题。 关键字:层次分析法、一致性检验、最优投资地
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
数学建模论文格式要求
数学建模论文格式要求 ●题名。字体为常规,黑体,二号。题名一般不超过20个汉字,必要时可加副标题。●摘要。文稿必须有不超过300字的内容摘要,摘要内容字体为常规,仿宋,五号。摘要应具备独立性和自含性,应是文章主要观点的浓缩。摘要前加“[摘要]”作标识,字体为加粗,黑体,五号。●正文。用五号宋体,1.5倍间距。文稿以10000字以下为宜。●文内标题。力求简短、明确,题末不用标点符号(问号、叹号、省略号除外)。层次不宜超过5级。第1级标题字体为常规,楷体,小四;第2级标题字体为加粗,宋体,五号;次级递减。层次序号可采用一.(一).1.(1).1),不宜用①,以与注释号区别。文内内容字体为常规,宋体,五号。●数字使用。数字用法及计量单位按GBT15835—1995《出版物上数字用法的规定》和1984年12月27日国务院发布的《中华人民共和国法定计量单位》执行。4位以上数字采用3位分节法。5位以上数字尾数零多的,可以“万”、“亿”作单位。标点符号按GBT15835—1995《标点符号用法》执行。●附表与插图。附表应有表序、表题、一般采用三线表;插图应有图序和图题。序号用阿拉伯数字标注。常规,楷体,五号。图序和图题的字体为加粗,宋体,五号。 ●引用。引用原文必须核对准确,注明准确出处;凡涉及数字模型和公式的,务请认真核算。●参考文献。论文应附有参考文献并遵循相应的格式。参考文献放在文末。“[参考文献]”字体为加粗,黑体,五号;其内容的汉字字体为常规,仿宋,小五。参考文献中书籍的表述方式为 序号作者书名版本(第1版不标注)出版地出版社出版年页码参考文献中期刊杂志论文的表述方式为序号作者论文名杂志名卷期号出版年页码参考文献中网上资源的表述方式为序号作者资源标题网址访问时间(年月日)●页眉,页脚。团队序号位于论文每页页眉的左端。页码位于每页页脚的中部,用阿拉伯数字从“1”开始连续编号。●论文用A4纸打印出来,并将论文首页和论文装订到一起,一齐上交。论文出处(作者) 一个教授心目中理想的学位论文 毕业论文提纲的步骤
美国大学生数学建模竞赛优秀论文翻译
优化和评价的收费亭的数量 景区简介 由於公路出来的第一千九百三十,至今发展十分迅速在全世界逐渐成为骨架的运输系统,以其高速度,承载能力大,运输成本低,具有吸引力的旅游方便,减少交通堵塞。以下的快速传播的公路,相应的管理收费站设置支付和公路条件的改善公路和收费广场。 然而,随着越来越多的人口密度和产业基地,公路如花园州公园大道的经验严重交通挤塞收费广场在高峰时间。事实上,这是共同经历长时间的延误甚至在非赶这两小时收费广场。 在进入收费广场的车流量,球迷的较大的收费亭的数量,而当离开收费广场,川流不息的车辆需挤缩到的车道数的数量相等的车道收费广场前。因此,当交通繁忙时,拥堵现象发生在从收费广场。当交通非常拥挤,阻塞也会在进入收费广场因为所需要的时间为每个车辆付通行费。 因此,这是可取的,以尽量减少车辆烦恼限制数额收费广场引起的交通混乱。良好的设计,这些系统可以产生重大影响的有效利用的基础设施,并有助于提高居民的生活水平。通常,一个更大的收费亭的数量提供的数量比进入收费广场的道路。 事实上,高速公路收费广场和停车场出入口广场构成了一个独特的类型的运输系统,需要具体分析时,试图了解他们的工作和他们之间的互动与其他巷道组成部分。一方面,这些设施是一个最有效的手段收集用户收费或者停车服务或对道路,桥梁,隧道。另一方面,收费广场产生不利影响的吞吐量或设施的服务能力。收费广场的不利影响是特别明显时,通常是重交通。 其目标模式是保证收费广场可以处理交通流没有任何问题。车辆安全通行费广场也是一个重要的问题,如无障碍的收费广场。封锁交通流应尽量避免。 模型的目标是确定最优的收费亭的数量的基础上进行合理的优化准则。 主要原因是拥挤的
全国大学生数学建模一等奖获奖论文
承诺书 我们仔细阅读了中国大学生数学建模竞赛的竞赛规则. 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们将受到严肃处理。 我们参赛选择的题号是(从A/B/C/D中选择一项填写): B 我们的电子文件名:B0302 所属学校(请填写完整的全名):广西师范学院 参赛队员(打印并签名) :1. 钟兴智 2. 尹海军 3. 斯婷 指导教师或指导教师组负责人(打印并签名):韦程东 日期: 2007 年 9 月 24 日赛区评阅编号(由赛区组委会评阅前进行编号):
编号专用页 赛区评阅编号(由赛区组委会评阅前进行编号): 全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):
乘公交,看奥运 摘要 我们基于最小换乘次数算法,设计了公交查询系统,能够分别从时间和花费 出发考虑,选择最优路径,以满足查询者的各种不同需求。 问题一:采用最小换乘次数算法,求出任意两站的最小换乘次数,在次数一定的情况下,分别选取花费最少和时间最少作为优化目标,建立两种模型:最少时间模型:∑∑==+-+?=3 1 3 1 5)))1(((3),(min i i i i i i i x q x n x B A f ;最少花费模型: ))1((),(m in '''3 1 i i i y x x B A g -+=∑;利用两种模型求出6组数局的最佳路线如下(两 地铁的线路转化成公交的问题,改进问题一中的模型求出此问题的最少时间模型 + +-+?=∑∑∑===)))5)))1(((3((),(m in 3 1 3 1 3 1 i i i i i i i i i x q x n x y B A f ++-+?-∑∑∑===)4))))1(((5.2)(1((31 31 ' 31 i i i i i i i i i x q x n x y ∑=-3 1 i )z 1(7i i y +∑=3 1 i z 6i i y 最小换乘算法进行了改进。 关键词:最小换乘次数, 算法,紧邻点,数据库,路线集
股票涨跌中数学模型毕业论文
目录 摘要 (Ⅱ) 关键词 (Ⅱ) 英文摘要 (Ⅱ) 英文关键词 (Ⅱ) 1 前言 (1) 2 国内外研究发展现状 (1) 3 股票的选取 (2) 3.1 MA(移动平均线技术) (3) 3.2 ASI与KDJ技术指标组合 (4) 3.3 DMI(趋向技术指标) (5) 4 模型建立 (5) 4.1 问题分析与回顾 (5) 4.2 建立股票价格预测模型 (6) 4.2.1 神经网络结构设计 (6) 4.2.2 网络模型选择 (7) 4.2.3 网络学习具体过程 (7) 4.3 算法工具以及样本数据来源 (8) 5 模型求解与股票价格预测 (8) 6 模型评价和改进 (12) 结束语 (12) 参考文献 (13)
股票涨跌中数学模型的研究 摘要:股票价格的涨跌受到政治、经济、社会因素的影响,针对股票价格具有非线性、不稳定性的特点,本文结合了三种实用的选股技术进行选股,利用神经网络强大的非线性逼近能力,设计出了优化的BP神经网络数学模型,并实现了对股票的价格进行预测。 关键词:股票;BP神经网络;数学模型 Stock ups and downs in the mathematical model study Wu Mengzhe (Kaili University Mathematical Sciences College, guizhou Kaili 556000) Abstract: The ups and downs of the stock price is influenced by political, economic, and social factors, the stock price has nonlinear instability characteristics, this paper combines three practical stock picking technology stock, a powerful non-linear neural networkapproximation capability of the design the BP neural network optimized mathematical model, and better short-term forecast on the stock price. Key words:Stock; BP neural network; mathematical model
全国大学生数学建模竞赛论文格式规范
全国大学生数学建模竞赛论文格式规范 (全国大学生数学建模竞赛组委会,2019年修订稿) 为了保证竞赛的公平、公正性,便于竞赛活动的标准化管理,根据评阅工作的实际需要,竞赛要求参赛队分别提交纸质版和电子版论文,特制定本规范。 一、纸质版论文格式规范 第一条,论文用白色A4纸打印(单面、双面均可);上下左右各留出至少2.5厘米的页边距;从左侧装订。 第二条,论文第一页为承诺书,第二页为编号专用页,具体内容见本规范第3、4页。 第三条,论文第三页为摘要专用页(含标题和关键词,但不需要翻译成英文),从此页开始编写页码;页码必须位于每页页脚中部,用阿拉伯数字从“1”开始连续编号。摘要专用页必须单独一页,且篇幅不能超过一页。 第四条,从第四页开始是论文正文(不要目录,尽量控制在20页以内);正文之后是论文附录(页数不限)。 第五条,论文附录至少应包括参赛论文的所有源程序代码,如实际使用的软件名称、命令和编写的全部可运行的源程序(含EXCEL、SPSS等软件的交互命令);通常还应包括自主查阅使用的数据等资料。赛题中提供的数据不要放在附录。如果缺少必要的源程序或程序不能运行(或者运行结果与正文不符),可能会被取消评奖资格。论文附录必须打印装订在论文纸质版中。如果确实没有源程序,也应在论文附录中明确说明“本论文没有源程序”。 第六条,论文正文和附录不能有任何可能显示答题人身份和所在学校及赛区的信息。 第七条,引用别人的成果或其他公开的资料(包括网上资料)必须按照科技论文写作的规范格式列出参考文献,并在正文引用处予以标注。 第八条,本规范中未作规定的,如排版格式(字号、字体、行距、颜色等)不做统一要求,可由赛区自行决定。在不违反本规范的前提下,各赛区可以对论文增加其他要求。 二、电子版论文格式规范 第九条,参赛队应按照《全国大学生数学建模竞赛报名和参赛须知》的要求提交以
毕业论文:高铁票价的数学模型(数学建模)
毕业论文:高铁票价的数学模型(数学建模)
毕业论文:高铁票价的数学模型(数学建模)
毕业论文 题目:高铁票价的数学模型所在系: 专业: 学号: 作者姓名: 指导教师: 年月日 高铁票价的数学模型
数学与计算科学系数学与应用数学专业 作者:学号:指导老师: 摘要:本文主要以京津城际高速铁路为依托,通过拉姆齐定价模型和高峰负荷定价法确定介于边际成本和盈亏平衡之间的最优票价。同时运用计量经济学的方法对京津城际高铁的票价需求弹性系数和运营成本做近似估计,并制定出京津城际高铁的票价运价率。最后再根据运价率求出武广高铁各路段的票价。 关键词:拉姆齐模型;高速铁路;票价 1 引言 1.1 国内外研究现状 高速铁路作为新型运输产品,近几年在我国逐渐兴起。引起了大量学者的研究兴趣,目前有许多学者从不同角度对与高速铁路相关的问题进行了广泛而深入的研究,同时也取得了丰硕的研究成果。 刘重庆[]1对俄罗斯高铁的改革发展情况进行了相关研究,同时也分析了该国的铁路运价策略。谢晓凌[]2对日本的高铁旅客票价政策进行了深度分析。杨洋[]3在借鉴国外高铁运价机制基础上,分析影响高铁客运专线票价的影响因素,提出比较完备的客运专线票价决定策略体系。叶蓓[]5运用系统动力学方法对高速铁路票价优化模型进行了研究,将该模型应用到了京沪高速铁路的定价应中,求得了相应的最优票价。刘晓佳,李友好[]6将有效性原理应用到京沪高铁的票价制定中,运用经济学中的有效性原理和运输通道客流量动态分配模型制定出京沪高速铁路的最优票价。高自友、四兵锋[]7将双层规划、灵敏度分析法等模型算法合理的运用到铁路票价领域。周龙[]4、常利,李丽红[]8等在基于拉姆齐模型定价理论的基础上,利用拉姆齐高峰负荷定价法对地铁票价进行了深度研究,为本文研究高铁票价提供了思路。同时本文将借鉴拉姆齐定价模型来对高铁票价进行研究。
数学建模论文格式官方要求
数学建模论文格式官方要求 题名。字体为常规,黑体,二号。题名一般不超过20 个汉字,必要时可加副标题。 摘要。文稿必须有不超过300字的内容摘要,摘要内容字体为常规,仿宋,五号。摘要应具备独立性和自含性,应是文章主要观点的浓缩。摘要前加“[摘要]”作标识,字体为加粗,黑体,五号。 正文。用五号宋体,1.5倍间距。文稿以10000 字以下为宜。 文内标题。力求简短、明确,题末不用标点符号(问号、叹号、省略号除外)。层次不宜超过5级。第1级标题字体为常规,楷体,小四;第2级标题字体为加粗,宋体,五号;次级递减。层次序号可采用 一.(一).1.(1).1),不宜用①,以与注释号区别。文内内容字体为常规,宋体,五号。 数字使用。数字用法及计量单位按GB T15835—1995《出版物上数字用法的规定》和1984年12月27日国务院发布的《中华人民共和国法定计量单位》执行。4位以上数字采用3位分节法。5位以上数字尾数零多的,可以“万”、“亿”作单位。标点符号按GB T15835—1995《标点符号用法》执行。
附表与插图。附表应有表序、表题、一般采用三线表;插图应有图序和图题。序号用阿拉伯数字标注。常规,楷体,五号。图序和图题的字体为加粗,宋体,五号。 引用。引用原文必须核对准确,注明准确出处;凡涉及数字模型和公式的,务请认真核算。 参考文献。论文应附有参考文献并遵循相应的'格式。参考文献放在文末。“[参考文献]”字体为加粗,黑体,五号;其内容的汉字字体为常规,仿宋,小五。 参考文献中书籍的表述方式为: 序号作者书名版本(第1版不标注) 出版地出版社出版年页码 参考文献中期刊杂志论文的表述方式为: 序号作者论文名杂志名卷期号出版年页码 参考文献中网上资源的表述方式为: 序号作者资源标题网址访问时间(年月日) 页眉,页脚。团队序号位于论文每页页眉的左端。页码位于每页页脚的中部,用阿拉伯数字从“1”开始连续编号。
2014年数学建模国家一等奖优秀论文设计
2014高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参 赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛下载)。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括、电子、网上咨询等) 与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或 其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文 引用处和参考文献中明确列出。 我们重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。如有违 反竞赛章程和参赛规则的行为,我们将受到严肃处理。 我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展 示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。 我们参赛选择的题号是(从A/B/C/D中选择一项填写): B 我们的报名参赛队号为(8位数字组成的编号): 所属学校(请填写完整的全名): 参赛队员 (打印并签名) :1. 2. 3.
指导教师或指导教师组负责人 (打印并签名): (论文纸质版与电子版中的以上信息必须一致,只是电子版中无需签名。以上容请仔细核对,提交后将不再允许做任何修改。如填写错误,论文可能被取消评奖资格。) 日期: 2014 年 9 月 15日赛区评阅编号(由赛区组委会评阅前进行编号):
2014高教社杯全国大学生数学建模竞赛 编号专用页 赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):
全国数学建模获奖论文
承诺书 我们仔细阅读了数学建模竞赛选拔的规则. 我们完全明白,在做题期间不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人研究、讨论与选拔题有关的问题。 我们知道,抄袭别人的成果是违反选拔规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。 我们郑重承诺,严格遵守选拔规则,以保证选拔的公正、公平性。如有违反选拔规则的行为,我们将受到严肃处理。 我们选择的题号是(从A/B/C中选择一项填写): 队员签名:1. 2. 3. 日期:年月日
2012年河南科技大学数学建模竞赛选拔 编号专用页 评阅编号(评阅前进行编号): 评阅记录(评阅时使用): 评 阅 人 评 分 备 注
C题数学建模竞赛成绩评价与预测 一、摘要 近20 年来,CUMCM 的规模平均每年以20%以上的增长速度健康发展,是目前全国高校中规模最大的课外科技活动之一。本文对数学建模竞赛成绩的评价与预测问题进行了建模、求解和相关分析。 对于问题一,首先对广东赛区各院校2008-2011年建模奖励数据进行统计分析,将决策问题分为三个层次,建立多层次模糊综合评判模型。在该模型中,将因素集{国家一等奖,国家二等奖,省一等奖,省二等奖,省三等奖}看作准则层,将2008-2011各年建模情况看作方案层,结合实际情况,给出改进综合评判模型,解得广东金融学院、华南农业大学的总体综合评定成绩分别2.9474、2.7141,排名第一、第二。 对于问题二,首先建立单年的综合评定模型,得出广州赛区各院校2008-2011年的综合评定成绩。鉴于仅有4组数据,分别采用GM(1,1)法、回归曲线最小二乘法、移动平均法进行建模,最后结合实际情况并根据结果对比以上三种模型,确定了移动平均法方案最优,最终得出广东金融学院、华南农业大学的综合评定成绩分别为0.7369、0.6785,依旧排名第一、第二,较好地解决了问题二。 对于问题三,鉴于附件2所给数据冗杂庞大,故从中抽取2008-2011年的建模数据作为样本,分别统计出本科组和专科组在这四年中每年获得国家一等奖和国家二等奖的人数;将问题一中国家一等奖、二等奖的权重进行归一化处理,建立类似问题一的特殊综合评判模型,得出本科组哈尔滨工业大学、解放军信息工程大学的综合评定成绩分别为5.5117、4.6609;专科组海军航空工程学院、太原理工轻纺与美术学院的综合评定成绩分别为1.3931、1.3095,名列各组第一、第二,问题三得到了较好解决。 对于问题四,除全国竞赛成绩、赛区成绩外,讨论了学生的能力、参赛队数、师资力量、学校的综合实力、硬件设施等因素对建模成绩评估的影响,考虑首先对因素集进行模糊聚类分析,然后用层次分析法来进行评价,用BP神经网络结合Matlab软件来进行预测,理论上问题四能够得到较好地得到解决。 关键词: 模糊综合评判模型GM(1,1)模型移动平均法综合评定成绩
数学建模论文设计范文
数模论文的撰写方法 1. 题目 2.摘要 3. 问题重述 4. 问题分析 5. 模型假设与约定 6. 符号说明及名词定义 7. 模型建立与求解①补充假设条件,明确概念,引进参数; ②模型形式(可有多个形式的模型); 8. 进一步讨论(参数的变化、假设改变对模型的影响) 9. 模型检验 (使用数据计算结果,进行分析与检验) 10. 模型优缺点(改进方向,推广新思想) 11. 参考文献及参考书籍和 12.附录 (计算程序,框图;各种求解演算过程,计算中间结果;各种图形、表格。) 下面是例:
1 问题的提出 位于我国西南地区的某个偏远贫困村,年平均降水量不足20mm ,是典型的缺水地区。过去村民的日常生活和农业生产用水一方面靠的是每家每户自行建造的小蓄水池,用来屯积每逢下雨时获得的雨水,另一方面是利用村里现有的四口水井。由于近年来环境破坏,经常是一连数月滴雨不下,这些小蓄水池的功能完全丧失。而现有的四口水井经过多年使用后,年产水量也在逐渐减少,在表1中给出它们在近9年来的产水量粗略统计数字。2009年以来,由于水井的水远远不能满足需要,不仅各种农业生产全部停止,而且大量的村民每天要被迫翻山越岭到相隔十几里外去背水来维持日常生活。 为此,今年政府打算着手帮助该村解决用水难的问题。从两方面考虑,一是地质专家经过勘察,在该村附近又找到了8个可供打井的位置,它们的地质构造不同,因而每个位置打井的费用和预计的年产水量也不同,详见表2,而且预计每口水井的年产水量还会以平均每年10%左右的速率减少。二是从长远考虑,可以通过铺设管道的办法从相隔20公里外的地方把河水引入该村。铺设管 道的费用为 L 66Q .0P 0.51 (万元),其中Q 表示每年的可供水量(万吨/年),L 表示管道长度(公里)。铺设管道从开工到完成需要三年时间,且每年投资铺设管道的费用为万元的整数倍。要求完成之后,每年能够通过管道至少提供100万吨水。 政府从2010年开始,连续三年,每年最多可提供60万元用于该村打井和铺设管道,为了保证该村从2010至2014年这五年间每年分别能至少获得150、160、170、180、190万吨水,请作出一个从2010年起三年的打井和铺设管道计划,以使整个计划的总开支尽量节省(不考虑小蓄水池的作用和利息的因素在)。 表1 现有各水井在近几年的产水量(万吨)