基于步态加速度的步态分析研究
步态分析
步态分析 一、概述 行走是人体躯干、骨盆、下肢以及上肢各关节和肌群的一种周期性规律运动,步态是指行走时人体的姿态,是人体结构与功能、运动调节系统、行为以及心理活动在行走时的外在表现。正常的步态有赖于中枢神经系统以及骨骼肌肉系统的正常、协调工作,当中枢神经系统或/和骨骼肌肉系统因疾病或损伤而受到损害时,就有可能出现步态的异常。步态分析是利用力学的概念和人体解剖、生理学知识对人体行走功能状态进行对比分析的一种生物力学研究方法。 (一)步态分析步骤 1、描述研究对象的步态模式和步态参数,并与正常步态进行比较找出其差异; 2、分析出现差异的原因,研究产生异常步态的机制; 3、确定改善步态的治疗方案,包括步态训练的方法、假肢或矫形器的装配、助行器的选择。 (二)步态分析方法 1.运动性步态分析对步行的运动模式或步行时身体节段间的相关进行描述,此类分析既可定性也可定量,临床上应用简单,易于开展,后面将详细介绍。 2.动力性步态分析需要具备专业的知识技术和昂贵的专用设备,目前在我国只有少数单位开展了此项工作,社区中不可能开展,此处不予介绍。 二、正常步态 (一)步态周期 行走过程中,从一侧足跟着地到该侧足跟再次着地所经历的时间称为一个步态周期。在一个步态周期中,每侧下肢都要经历一个离地腾空并向前迈步的摆动相(迈步相)和一个与地面接触并负重的站立相(支撑相)。摆动相是指从足尖离地到足跟着地,足部离开支撑面的时间,约占步态周期的40%;站立相是指从足跟着地到足尖离地,即足部支撑面与地板接触的时间,约占步态周期的60%。其中,重心从一侧下肢向另一侧下肢转移,双侧下肢同时与地面接触的时间称之为双支撑相,一个正常步态周期中会出现两次双支撑相,各占步态周期的10%。详见图1。 图1 步态周期示意图
加速度(教案)讲解
东南教育用心做教育,给孩子以改变未来力量授课学案 【自主学习】 (一)加速度 1.定义:________________________________________ 公式:___________ 2.单位: _______ 3.加速度是 ___量,方向与 ________方向相同。
a与v方向相同→________ 直线运动;a与v方向相反→ ______直线运动。 4.匀变速运动:_________________________________。 5.v、Δv与a的区别 ⑴速度:描述 _________________,对应于某一时刻。 ⑵速度的变化:,描述 ________________,对应于某一过程。 ⑶加速度:即速度的变化率,描述_______________________。 (二)从v-t图象看加速度 寄语:古之立大事者,不惟有超世之才,亦必有坚韧不拔之志。 东南教育用心做教育,给孩子以改变未来力量 速度—时间图象是以 ____轴为横轴,以_____为纵轴,在坐标系中将不同时刻的速度以坐标的形式描点,然后连线,就画出了速度—时间图象 在v-t图象中,图线的斜率表示物体运动的。斜率为正,表示加速度方向与所设正方向相同;斜率为负表示加速度方向与所设正方向相反;斜率不变,表示加速度不变。 一、加速度 [问题设计] 下列三种车辆起步后:自行车在5s内速度增大到14m/s;小型轿车在20 s内速度增大到30 m/s;旅客列车在100s内速度增大到40m/s.通过计算分析,哪种车辆速度变化大?哪种车辆速度增加得快? v=14m/sΔ旅客列车速度变化大,自行车速度增加得快.因为:自行车速度增加,答案1vv=40m/s,旅客列车速度增加Δ小型轿车速度增加Δ,所以旅客列车速度变化=30 m/s32大; v14Δ1自行车1s内速度增加=m/s=2.8 m/s t5Δ1v30Δ2小型轿车1s内速度增加=m/s=1.5 m/s t20Δ2v40Δ3旅客列车1s内速度增加=m/s=0.4 m/s t100Δ3vvvΔΔΔ321>>,所以自行车速度增加得快.tttΔΔΔ312[要点提炼] vΔa=. 1.定义:速度的变化量与发生这一变化所用时间的比值.即tΔ2-2. m·s2.单位:国际单位制中,加速度的单位是米每二次方秒,符号是m/s或 3.物理意义a是表示物体速度变化快慢的物理量,也叫速度对时间的变化率.加速度 vΔtaav填“有关”或“无的大小与Δ(、.4Δ=无关是用比值定义法定义的物理量,tΔ关”). [延伸思考]
吉林省市(县)抗震设防烈度、设计基本地震加速度一览表
吉林省市(县)抗震设防烈度、设计基本地震加速度一览表
附件:吉林省市(县)抗震设防烈度、设计基本地震加速度一览表 烈度 地 区加速度ⅧⅦⅥ0.20g0.15g0.10g0.05g 长春长春、九台榆树、德惠、农安 吉林吉林、舒兰、永吉蛟河、桦甸、磐石 四平伊通、公主岭、梨树、四平白城大安白城镇赉、洮南、通榆 松原松原、前郭尔罗斯乾安扶余、长岭 辽源东丰、东辽、辽源 延边延吉、汪清、图们、珲春、 龙井、和龙、安图 白山抚松、靖宇
通化辉南、梅河口 吉林省乡镇抗震设防烈度区划一览表 地区区划 乡 镇 名称 地震动峰值加速度分区 ⅦⅥ 0.15 0.1 0.05 镇(乡)镇(乡)镇(乡) 长春长春市 大屯镇、永春镇、新立城镇、净月镇、泉眼镇、四家乡、 兴隆山镇、奋进乡、双德镇、玉潭镇、幸福乡、劝农山 镇、齐家镇、新安镇、三道镇、英俊乡、奢岭办事处、 城西乡、石溪乡、鹿乡镇、云山办事处、平湖办事处 佟家乡、太平镇、长 岭乡、山河办事处、 合心镇、兰家镇、土 顶镇 九台市 土门岭镇、西营城镇、沐石河镇、其塔木镇、饮马河镇、 龙家堡镇、卡伦湖镇、东湖镇、苇子沟镇、胡家回族乡、 卢家乡、二道沟乡、加工河乡、波泥河乡、莽卡满族乡、 九郊乡、庆阳乡、三台乡 城子街镇、六台乡、 上河湾镇、纪家镇、 春阳乡、鸡鸣乡、兴 隆镇 农安市 杨树林乡、哈拉海 镇、高家店镇、小城 子乡、黄鱼圈乡 三盛玉乡、永安乡、万顺乡、榛柴岗乡、新农乡、柴岗 镇、万金塔乡、青山口乡、靠山乡 伏龙泉镇、鲍家镇、 开安镇、合隆镇、烧 锅镇、华家镇、新刘 家外地人、巴吉垒镇、 前岗乡、滨河乡、龙 王乡、三岗乡、黄金
郑州大学 基于加速度传感器的计步器设计
郑州大学课程设计(报告) 题目:基于加速度传感器的计步器设计 课程:传感器与检测技术 任课教师:职称: 学生姓名:学号: 专业: 院(系): 完成时间:
基于加速度传感器的计步器设计 摘要随着我们生活水平的不断提高,社会各阶层的人们开始对身体健康尤其的关注。然而健身的方法数不胜数,步行是最好的运动之一。健康需要走出来,行走锻炼——人类生命健康的加氧站。步行是一种静中有动、动中有静的健身方式,可以缓解神经肌肉紧张。据专家实验得出,当烦躁、焦虑的情绪涌上心头时,我们以轻快的步伐散步15分钟左右,即可缓解紧张、稳定情绪。计步器功能可以根据计算人的运动情况来分析人体的健康状况。而人的运动情况可以通过很多特性来进行分析。比如人在运动时会产生加速度。 论文主要采用了以单片机AT89C52为核心的计步器控制系统,并实现运动计步,是通过人运动时产生加速度变化来实现的,本文利用具有体积小,功耗低,三轴加速度传感器MMA7455来实现,采集到的加速度数据通过适当的算法就可以实现计步功能,最后通过LCD1602给予显示。 本设计的特色在于完整的设计出计步器及其控制电路,整个系统具有控制方便,检测精确,硬件结构简单,方便携带,成本较低等优点。 关键词:单片机;加速度传感器;液晶显示
Abstract With our continuous improvement of living standards, social strata, especially the health of people began to concern. However, numerous methods of fitness, walking is the best exercise one. Health needs to come out, walking exercise - human life and health and oxygen station. Walking is a static in action, moving in a static way of fitness, can relieve nerve muscle tension. According to experts, experimentally derived, when irritability, anxiety in my heart, we are walking at a brisk pace for about 15 minutes, you can relieve tension, emotional stability. Pedometer function can be calculated according to the movement of the person to analyze human health. And the movement of people can be analyzed through a number of characteristics. Such as human in motion will produce accelerations. Thesis uses a microcontroller AT89C52 as the core control system pedometer, pedometer and achieve movement is produced by the human movement acceleration change to achieve, this paper has a small size, low power consumption, triaxial acceleration sensor MMA7455 to implementation, the acceleration data collected through appropriate algorithms can achieve step count, and finally through LCD1602 given display. This design feature is the complete design of a pedometer and its control circuit, the whole system easy to control, detection accuracy, the hardware structure is simple, easy to carry, and low cost. Keywords: Mcrocontroller, Acceleration sensors, LCD
正弦振动加速度与速度与振幅与频率关系
正弦振动一共有四个参数来描述,即:加速度(用a表示)m/s A2 速度(用v 表示) m/s 位移(用 D 表示)行程( 2 倍振幅)m 频 率(用 f 表示)Hz 公式:a=2 n fv v=2 n fc其中d=D/2) a=(2 n f)2d (2 为平方) 说明:以上公式中物理量的单位均为国际单位制例如频率为10HZ ,振幅为10mm V=2*3.1415926*10*10/1000=0.628m/s a=(2*3.1415926*10)A2*10/1000=39.478/m/sA2 正弦运动振幅5mm频率200HZ 我想你是在做一个弹簧振子,加速度是变化的,我想你需要的应该是弹簧的弹性系数k 首先写出振动方程Y = 5sin(x/200) 根据设计要求,弹簧要使振子在1/200s 的时候运动距离达到5mm ,速度由最大的V0 变为0, 在这个过程中属于变力做功,(不知道你会积分不?)如果不会也没有关系,我 们知道弹簧的弹性势能为0.5kHA2 (式中H是弹簧的伸长量),在达到振幅时, H = 5mm = 5 X!0A(-3)m 应用动能定理:0.5kHA2=1/2mV0A2 同时,应满足时间频率要求,应用动量定理,就必须用积分了,弹力在1/800(完成1/4周期需要的时间)时间内的冲量为I, I 是以函数kHt为被积函数,对H 由0到5, t由0到1/800的定积分,即1 = 6.25 乂10八(-5沐 由动量定理 1 = mV1-mV0,得,mV0 = 6.25 ><10八(-5沐联立两式解得: k= 256m (式中m 不是单位,是振子得质量) 而且初速度为400 米每秒振动台上放置一个质量m= 10kg 的物体,它们一起上下作简谐振动,其 -3 频率V = 10Hz振幅A = 2 X 10-m,求:(1)物体最大加速度的大小; (2) 解:取x轴竖直向下,以振动的平衡位置为坐标原点,列运动方程 x=A cos (2 n V t +? 于是,加速度 2 2 a= —4 n V A cos (2 n V t + ? (1)加速度的最大值 2 2 -2 | a m |= 4 n V A = 7.9 m?s ⑵由于物体在振动过程中仅受重力mg及竖直向上的托力f,按牛顿第二定律在最高位置m g —f = m| a m f = m(g—| a m|)= 19.1N 这时物体对台面的压力最小,其值即19.1N 在最低位置m g—f= m(-| a m f= m(g+| a m|)= 177N 这时物体对台面的压力最大,其值即177N
步态分析
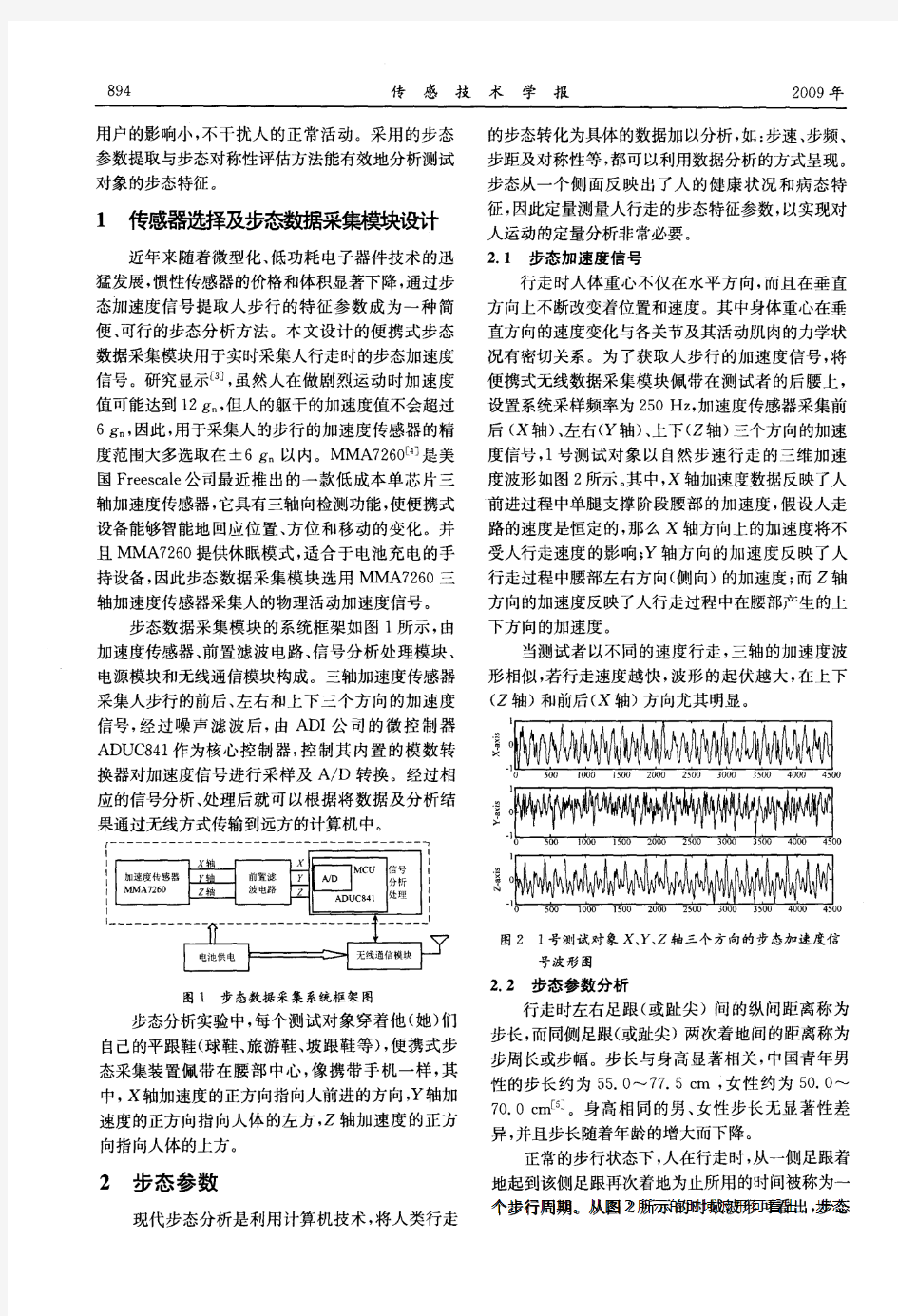
运动中,不同的步态反应了损伤的肌肉 如运动过程中骨盆摆动过大,臀中肌试验(+)称为臀中肌步态,通过训练臀中肌力量,达到5级可以改善 下文介绍常见的步态及引起的原因,希望对大家有帮助 临床步态分析 步态是人类步行的行为特征。步行是人类生存的基础,是人类与其它动物区别的关键特征之一。正常步行并不需要思考,然而步行的控制十分复杂,包括中枢命令,身体平衡和协调控制,涉及足、踝、膝、髋、躯干、颈、肩、臂的肌肉和关节协同运动。任何环节的失调都可能影响步态,而某些异常也有可能被代偿或掩盖。临床步态分析旨在通过生物力学和运动学手段,揭示步态异常的关键环节和影响因素,从而协助康复评估和治疗,也有助于协助临床诊断、疗效评估、机理研究等。 一、概述 (一)自然步态 1、步行的基本功能从某一地方安全、有效地移动到另一地方。 2、自然步态的要点(1)合理的步长、步宽、步频。(2)上身姿势稳定。(3)最佳能量消耗或最省力的步行姿态。 3、自然步态的生物力学因素 (1)具备控制肢体前向运动的肌力或机械能。 (2)可以在足触地时有效地吸收机械能,以减小撞击,并控制身体的前向进程。 (3)支撑相有合理的肌力及髋膝踝角度,以及充分的支撑面。 (4)摆动相有足够的推进力、充分的下肢地面廓清和合理的足触地姿势控制。 (二)步行周期 1、支撑相 下肢接触地面和承受重力的时相,占步行周期的60%,包括: (1)早期(early stance) 包括首次触地和承重反应,正常步速时占步行周期的10%~12%。①首次触地指足跟接触地面的瞬间,使下肢前向运动减速,落实足在支撑相的位置的动作。参与的肌肉包括胫前肌、臀大肌、腘绳肌。首次触地异常是造成支撑相异常的最常见原因之一。②承重反应指首次触地之后重心由足跟向全足转移的过程。骨盆运动在此期间趋向稳定,参与的肌肉包括股四头肌、臀中肌、腓肠肌。③双支撑相支撑足首次触地及承重反应期相当于对侧足的减重反应和足离地,由于此时双足均在地面,又称之为双支撑相。双支撑相是步行周期中最稳定的时期。双支撑相的时间与步行速度成反比。双支撑相时间延长,使步行速度越慢,步行越稳定;而双支撑相时间缩短,使步行速度加快,但步行越不稳定;到跑步时双支撑相消失,表现为双足腾空。患者步行障碍时往往首先出现的异常就是双支撑相时间延长,步行速度减慢,以增加步行的稳定性。④地面反作用力(GRF)首次触地时的GRF一般相当于体重和加速度的综合,正常步速时为体重的120%~140%。步速越快,GRF 越高。下肢承重能力降低时可以通过减慢步速,减少肢体首次触地负荷。缓慢步态的GRF 等于体重。患者在下肢承重能力减退时往往通过减慢步行速度以减轻下肢承重负荷。(2)中期(mid stance) 支撑足全部着地,对侧足处于摆动相,是唯一单足支撑全部重力的时相,正常步速时大约为步行周期的38%~40%。主要功能是保持膝关节稳定,控制胫骨前向
重力加速度表
全国各地区重力加速度表 力加速度地区修正值 序号地区 g(m/s2) g/1kg g/3kg g/6kg g/15kg g/30kg 1 包头9.7986 -0.3981 -1.1943 -2.3886 -11.9430 -11.9430 2 北京9.8015 -0.7045 -2.1135 -4.2270 -10.5675 -21.1350 3 长春9.8048 -1.0413 -3.1239 -6.2478 -15.6195 -31.2390 4 长沙9.791 5 0.3267 0.9801 1.9602 9.8010 9.8010 5 成都9.7913 0.3267 0.9801 1.9602 4.9005 9.8010 6 重庆9.7914 0.326 7 0.9801 1.9602 4.9005 9.8010 7 大连9.8011 -0.6636 -1.9908 -3.9816 -9.9540 -19.9080 8 广州9.7833 0.6432 1.9296 3.8592 9.6480 19.2960 9 贵阳9.7968 0.7963 2.3889 4.7778 23.8890 23.8890 10 哈尔滨9.8066 -1.2251 -3.6753 -7.3506 -18.3765 -36.7530 11 杭州9.7936 0.1020 0.3060 0.6120 1.5300 3.0600 12 海口9.7863 0.8474 2.5422 5.0844 25.4220 25.4220 13 合肥9.7947 0.0204 0.0612 0.1224 0.3060 0.6120 14 吉林9.8048 -1.0413 -3.1239 -6.2478 -15.6195 -31.2390 15 济南9.7988 -0.3981 -1.1943 -2.3886 -5.9715 -11.9430 16 昆明9.7830 1.1230 3.3690 6.7380 16.8450 33.6900 17 拉萨9.7799 0.5513 1.6539 3.3078 16.5390 16.5390 18 南昌9.7920 0.2654 0.7962 1.5924 7.9620 7.9620 19 南京9.7949 -0.0306 -0.0918 -0.1836 -0.4590 0.9180 20 南宁9.7877 0.7044 2.1132 4.2264 10.5660 21.1320 21 青岛9.7985 -0.3981 -1.1943 -2.3886 -5.9715 -11.9430 22 上海9.7964 0.0000 0.0000 0.0000 0.0000 0.0000 23 沈阳9.8035 -0.9086 -2.7258 -5.4516 -13.6290 -27.2580 24 石家庄9.7997 -0.5513 -1.6539 -3.3078 -8.2695 -16.5390 25 太原9.7970 -0.2450 -0.7350 -1.4700 -3.6750 -7.3500
步态分析实验报告
步态分析方案设计 报告说明:我看了五篇关于步态分析的文献,并对其具体实验方法进行归纳。五篇文献的原文在文件夹中。最后为我的方案设计。 一、A practical gait analysis system using gyroscopes陀螺仪分析步态 本研究是为了调查使用单轴陀螺仪来研制简单便携步态分析系统的可行性。陀螺仪绑在小腿和大腿的皮肤表面,记录小腿和大腿角速度。这两部分的倾斜度和膝关节角度都来自角速度。使用从运动分析系统得到的信号来评估角速度和陀螺仪传来的信号,发现这些信号有不错的相关性。当转身时,腿部倾斜度和角度信号会发生漂移,有两种方法来解决这个问题:(1)自动复位系统,重新初始化每个步态周期的角度;(2)高通滤波。两种方法都能很好的纠正漂移。小腿部的单陀螺仪可以提供以下信息:腿部倾斜度、摆动频率、步数以及步幅和步速的估计。 具体方法: 受试者在步态实验室沿直线行走进行陀螺仪数据收集,陀螺仪用绳子固定在大腿和小腿部,感测轴沿中间-横向方向,以测量矢状平面中的角度。 两个人加入测试,一个是不完整的脊髓损伤,一个没有损伤。一运动分析系统使用各部分解剖学位置的回射标记物来评估腿部的偏移、腿部的角速度和膝角度。实验开始前5s,受试者直立站立以初始化倾斜角度和陀螺仪的偏置,随后,对象以一个自己喜欢的速度沿预定路径行走。进行了三组实验来分析陀螺仪的性能,并计算步幅、步态周期时间和每次行走期间的速度。第一个实验,数据来自两小腿上陀螺仪的信号,并与未损伤者进行比较。后两个实验是陀螺仪的数据与运动分析系统进行比较。第一个实验是比较小腿不同位置的陀螺仪信号,对于同一小腿上的两个点,先站立后倾斜,两个点的角速度、角度应该是相同的,陀螺仪一个放在胫骨关节处,一个放在胫骨靠近踝关节10cm处。第二个实验一个放置在大腿髌骨上方10cm处,一个在胫骨靠近踝关节10cm处,记录的是陀螺仪的角速度。第三个实验,陀螺仪放置于第二个相同,受试者直行4.5m然后转身180°。 二、Acoustic Gaits: Gait Analysis With Footstep Sounds 声步态 我们描述的是声步态——从人正常行走时的脚步声推导人的自然步态特征。我们引入了步态轮廓,这是从通过麦克风收集的脚步声时间信号得到的,可以说明某些时空步态参数,这些参数是通过对声步态轮廓的三个时间信号分析方法提取,三个时间信号分别是平方能量估计、希尔伯特变量和Teager–Kaiser能量。通过对这些参数估计的统计学分析,我们发现从步态轮廓获得的时空参数和步态特征可以连续可靠地评估目前用于标准化步态评估的临床和生物测定步态参数信息。我们的结论是Teager–Kaiser能量可以在不同时间、地点提供最稳定的步态参数估计。相对于目前实验室步态分析中使用的昂贵侵入式系统,如测力台、压力垫、可穿戴传感器,声步态使用便宜的麦克风和计算设备制成了准确非侵入式的步态分析系统,而且实验室的一些系统会改变正在测量的步态参数。
1.高空飞行中的生物力学正加速度,即作用于人体的力是从头指向.
1.高空飞行中的生物力学:正加速度,即作用于人体的力是从头指向脚的,其以“视觉发黑”为 测量忍受指标,此时a=3g ,负加速度即作用于人体的力是由脚指向头部,其以“视觉发红”为测量忍受指标,此时a=-3g ;横向加速度,即作用于人体的力与身体前后左右面垂直,其以“呼吸困难”为测量忍受指标,此时a=15g ,那么, 航天器的气密仓的设计如图所示,它固定在一个横轴 上,可绕轴做360°旋转,这样设计的目的是( ) A .让宇航员舒适些 B .始终承受横向加速度 C .始终承受负加速度 D .始终承受正加速度 2.一质点自x 轴原点出发,沿正方向以加速度a 加速,经过to 时间速 度变为v0,接着以-a 加速度运动,当速度变为-v0/2时,加速度又变 为a ,直至速度变为v0/4时,加速度再变为-a 。,直至速度变为 -v0/8……,其v-t 图象如图所示,则下列说法中正确的是 A .质点一直沿x 轴正方向运动 B .质点将在x 轴上—直运动,永远不会停止 C .质点最终静止时离开原点的距离一定大于v 0t 0 D .质点运动过程中离原点的最大距离为v 0t 0 3.如图所示,质量均为m 的物体A 、B 通过一劲度系数为k 的轻弹簧 相连,开始时B 放在地面上,A 、B 都处于静止状态.现用手通过细绳缓 慢地将A 向上提升距离L 1时,B 刚要离开地面,此过程手做功W 1、手做 功的平均功率为P 1;若将A 加速向上拉起,A 上升的距离为L 2时,B 刚 要离开地面,此过程手做功W 2、手做功的平均功率为P 1.假设弹簧一直 在弹性限度范围内,则 A .L 1 = L 2 = k mg B .L 2 >k mg L 21= C .W 2 > W 1 D .P 2< P 1 4.如图所示,水平地面附近,小球B 以初速度v 斜向上瞄准另一小球A 射出,恰巧在B 球射出的同时,A 球由静止开始下落,不计空气阻力.则两球在空中运动的过程中 A .A 做匀变速直线运动, B 做变加速曲线运动 B .相同时间内B 速度变化一定比A 的速度变化大 C .两球的动能都随离地竖直高度均匀变化 D .A 、B 两球一定会相碰 5.一物体放在升降机底板上,随同升降机由静止开始竖直向下运动, 运动过程中物体的机械能与物体位移关系的图象如图所示,其中1 O s -过程的图线为曲线,12s s -过程的图线为直线.根据该图象,下列判断 正确的是 A .1O s -过程中物体所受合力一定是变力 B .12s s -过程中物体可能在做匀速直线运动 C .12s s -过程中物体可能在做变加速直线运动 D .2O s -过程中物体的动能可能在不断增大
加速度计类型简介
定义 中文名称:加速度传感器 英文名称:acceleration transducer 定义:能感受加速度并转换成可用输出信号的传感器 应用学科:机械工程(一级学科);传感器(二级学科);物理量传感器(三级学科)。 加速度传感器是一种能够测量加速力的电子设备。加速力就是当物体在加速过程中作用在物体上的力,就好比地球引力,也就是重力。加速力可以是个常量。加速度计有两种:一种是角加速度计,是由陀螺仪(角速度传感器)改进的。另一种就是线加速度计。[1] 2分类 压电式 压电式加速度传感器又称压电加速度计。它也属于惯性式传感器。压电式加速度传感器的原理是利用压电陶瓷或石英晶体的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比。 压阻式 基于世界领先的MEMS硅微加工技术,压阻式加速度传感器具有体积小、低功耗等特点,易于集成在各种模拟和数字电路中,广泛应用于汽车碰撞实验、测试仪器、设备振动监测等领域。加速度传感器网为客户提供压阻式加速度传感器/压阻加速度计各品牌的型号、参数、原理、价格、接线图等信息。 电容式 电容式加速度传感器是基于电容原理的极距变化型的电容传感器。电容式加速度传感器/电容式加速度计是对比较通用的加速度传感器。在某些领域无可替代,如安全气囊,手机移动设备等。电容式加速度传感器/电容式加速度计采用了微机电系统(MEMS)工艺,在大量生产时变得经济,从而保证了较低的成本。 伺服式
伺服式加速度传感器是一种闭环测试系统,具有动态性能好、动态范围大和线性度好等特点。其工作原理,传感器的振动系统由"m-k”系统组成,与一般加速度计相同,但质量m上还接着一个电磁线圈,当基座上有加速度输入时,质量块偏离平衡位置,该位移大小由位移传感器检测出来,经伺服放大器放大后转换为电流输出,该电流流过电磁线圈,在永久磁铁的磁场中产生电磁恢复力,力图使质量块保持在仪表壳体中原来的平衡位置上,所以伺服加速度传感器在闭环状态下工作。由于有反馈作用,增强了抗干扰的能力,提高测量精度,扩大了测量范围,伺服加速度测量技术广泛地应用于惯性导航和惯性制导系统中,在高精度的振动测量和标定中也有应用。 线加速度计的原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量) 我们只需要测量F就可以了。怎么测量F?用电磁力去平衡这个力就可以了。就可以得到F对应于电流的关系。只需要用实验去标定这个比例系数就行了。当然中间的信号传输、放大、滤波就是电路的事了。 多数加速度传感器是根据压电效应的原理来工作的。 所谓的压电效应就是"对于不存在对称中心的异极晶体加在晶体上的外力除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应"。 一般加速度传感器就是利用了其内部的由于加速度造成的晶体变形这个特性。由于这个变形会产生电压,只要计算出产生电压和所施加的加速度之间的关系,就可以将加速度转化成电压输出。当然,还有很多其它方法来制作加速度传感器,比如压阻技术,电容效应,热气泡效应,光效应,但是其最基本的原理都是由于加速度产生某个介质产生变形,通过测量其变形量并用相关电路转化成电压输出。每种技术都有各自的机会和问题。 压阻式加速度传感器由于在汽车工业中的广泛应用而发展最快。由于安全性越来越成为汽车制造商的卖点,这种附加系统也越来越多。压阻式加速度传感器2000年的市场规模约为4.2亿美元,根据有关调查,预计其市值将按年平均4.1%速度增长,至2007年达到5.6亿美元。这其中,欧洲市场的速度最快,因为欧洲是许多安全气囊和汽车生产企业的所在地。 压电技术主要在工业上用来防止机器故障,使用这种传感器可以检测机器潜在的故障以达到自保护,及避免对工人产生意外伤害,这种传感器具有用户,尤其是质量行业的用户所追求的可重复性、稳定性和自生性。但是在许多新的应用领域,很多用户尚无使用这类传感器的意识,销售商冒险进入这种尚待开发的市场会麻烦多多,因为终端用户对由于使用这种传感器而带来的问题和解决方法都认识不多。如果这些问题能够得到解决,将会促进压电传感器得到更快的发展。2002年压电传感器市值为3亿美元,预计其年增长率将达到4.9%,到2007年达到4.2亿美元。 使用加速度传感器有时会碰到低频场合测量时输出信号出现失真的情况,用多种测量判断方法一时找不出故障出现的原因,经过分析总结,导致测量结果失真的因素主要是:系统低频响应差,系统低频信噪比差,外界环境对测量信号的影响。所以,只要出现加速度传感器低频测量信号失真情况,对比以上三点看看是哪个因素造成的,有针对性的进行解决[5]。
三轴加速度传感器的步态识别系统
三轴加速度传感器的步态识别系统 近年来随着微机电系统的发展,加速度传感器已经广泛应用于各个领域并拥有良好的发展前景。例如在智能家居、手势识别、步态识别、跌倒检测等领域,都可以通过加速度传感器实时获得行为数据从而判断出用户的行为情况。 目前许多智能手机都内置多种传感器,通过预装软件就能够获得较精确的原始数据。本文提出一种基于三轴加速度传感器,用智能手机采集用户数据,对数据进行处理及特征提取获得特征矩阵并分类识别的方法,有效地识别了站立、走、跑、跳四种动作。 人体动作识别处理过程主要包含数据采集、预处理、特征提取和分类器识别数据采集数据采集和发送模块安装在用户端,另一个数据接收模块接在电脑终端上。 由于我们制作的采集模块很轻、很小,所以方便佩戴。当用户运动时,三轴加速度传感器会将据采集并通过无线方式发送给电脑接收模块,再通过电脑上的软件部分对采集到的数据进行分析处理,将结果输出,显示用户的实时状态。 本文使用的加速度传感器数据来自于共计60个样本。传感器统一佩戴于腰间。本文选取了其中一位采集者的数据用于主要分析研究,
其余两位采集者的数据则用于验证由第一位采集者数据研究所得的结论,这样的做法既减小了数据处理的繁杂又能保证最终结果的准确性。预处理应用程序设置的采集时间间隔为0.1s,对每一个动作的采集时间为25s。考虑到用户在采集数据一开始与将要结束时的动作不平稳可能对数据带来较大影响,前2s2s采集的数据将被舍弃不予分析。因原始加速度信号一般都含有噪声,为了提高数据分析结果的准确性,通常在原始加速度信号进行特征提取前对其进行去躁、归一化、加窗等预处理。通过加窗处理,不仅规整了加速度信号的长度,而且方便研究人员按照需要选择适宜的信号长度,这样有利于后续的特征提取。 许多研究人员使所示。研究人员采集的加速度传感器信号由于采集者的动作力度不同造成加速度信号的幅度差异较大,这会对之后的分类识别造成负面影响,归一化技术可以调整加速度信号的幅度,按照一定的归一化算法可以使加速度信号的幅度限定在某一数值范围内,文献[2]在识别跑、站立、跳和走路这四种动作时对四种动作的加速度信号进行了归一化;文献[3]在进行手势识别时对手势动作的加速度信号进行了归一化处理。特征提取特征提取和选择模块的作用在于从加速度信号中提取出那些表征人体行为的特征向量,处于预处理模块和分类器模块之间,是人体行为识别过程中的一个重要环节,直接影响分类识别的效果。特征的提取方法具有多样性,对于不同的识别目的,研究人员会提取不同的特征,例如为了识别分类站立和跑步,研究人员通常会选取方差和标准差这类能够反映加速度信号变化大小的特征,而为了识别分类走路和跑步,研究人员通常会选取能量
加速度与位移
加速度与位移 1.速度和时间的关系 (1)速度公式 由加速度的定义公式a=,可得匀变速直线运动的速度公式为:=+at 为末速度,为初速度,a为加速度. 此公式对匀加速直线运动和匀减速直线运动都适用.一般取初速度 的方向为正方向,加速度a可正可负.当a与同向时,a>0,表明物体的速度随时间均匀增加;当a与反向时,a<0,表明物体的速度随时间均 匀减小. 当a=0时,公式为= 当=0时,公式为=at 当a<0时,公式为=-at(此时只能取绝对值) 可见,=+at是匀变速直线运动速度公式的一般表示形,只要知道初速度和加速a,就可以计算出各个时刻的瞬时速度. 2.位移和时间的关系 (1)平均速度公式 做匀变速直线运动的物体,由于速度是均匀变化的,所以在某一段 上的平均速度应等于初、末两速度的平均值,即 此公式只适用于匀变速运动,对非匀变速运动不适用.例如图2-14中甲物体在前5s内的平均速度为3m/s,乙物体在4s内的平均速度为3m /s (2)位移公式 s为t时间内的位移. 当a=0时,公式为s=t当=0时,公式为s= 当a<0时,公式为s=t-(此时a只能取绝对值). 可见:s=t+a是匀变速直线运动位移公式的一般表示形式,只要知道运动物体 的初速度和加速度a,就可以计算出任一段时间内的位移,从而确定任 意时刻物体所在的位置. 1、选择题: 1.一物体做匀变速直线运动,下列说法中正确的是()
A.物体的末速度与时间成正比 B.物体的位移必与时间的平方成正比 C.物体速度在一段时间内的变化量与这段时间成正比 D.匀加速运动,位移和速度随时间增加;匀减速运动,位移和速度随时间减小 2.物体做直线运动时,有关物体加速度,速度的方向及它们的正负值说法正确的是( ) A.在匀加速直线运动中,物体的加速度的方向与速度方向必定相同B.在匀减速直线运动中,物体的速度必定为负值 C.在直线线运动中,物体的速度变大时,其加速度也可能为负值D.只有在确定初速度方向为正方向的条件下,匀加速直线运动中的加速度才为正值 3.物体以2m/s2的加速度作匀加速直线运动,那么在运动过程中的任意1S内,物体的( ) A.末速度是初速度的2倍 B.末速度比初速度大2m/s C.初速度比前一秒的末速度大2m/s D.末速度比前一秒的初速度大2m/s 4.原来作匀加速直线运动的物体,若其加速度逐渐减小到零,则物体的运动速度将( ) A.逐渐减小 B.保持不变 C.逐渐增大 D.先增大后减小 5.汽车以20 m/s的速度做匀速直线运动,刹车后的加速度大小为5,那么开始刹车6 s汽车的速度大 小为() A. 20 m/s B. 0 m/s C. —10 m/s D. 5 m/s 6.关于自由落体运动,下面说法正确的是() A.它是竖直向下,v0=0,a=g的匀加速直线运动 B.在开始连续的三个1s内通过的位移之比是1∶3∶5 C.在开始连续的三个1s末的速度大小之比是1∶2∶3 D.从开始运动起依次下落4.9cm、9.8cm、14.7cm,所经历的时间之比为1∶∶ 7.甲、乙两车某时刻由同一地点沿同一方向开始做直线运动,若以该时刻作为计时起点,得到两车的图象如图所示,则下列说法正确的是()
基于加速度传感器的计步器设计
微机电系统设计与制造 到宿 到山顶 舍 : 四点底但是 的是 是的上单 上单是的
目录 0 引言 (1) 1 人体运动模型 (2) 2 算法设计 (3) 3 硬件实现 (5) 4 结论 (6) 参考文献 (7)
基于加速度传感器LIS3DH 的计 步器设计 摘要:设计了一种基于微机电系统( MEMS) 加速度传感器LIS3DH 的计步器, 包括运动检测、数据处理和显示终端。数字输出加速度传感器LIS3DH 作为运动检测模块,检测人体运动时加速度变化; 数据处理模块对加速度信息进行处理,使用FFT 滤波和自适应频率范围去除噪声对加速度信号的影响,利用加速度变化的上升、下降区间实现计步功能。实验结果表明: 该计步系统具有体积小、结构简单、功耗低、工作稳定的特点,能够提供较高精度的计步功能。 关键词:微机电系统; 计步器; 加速度传感器; 高精度 0 引言 计步器是一种日常锻炼进度监控器,可以计算人们行走的步数,估计行走距离、消耗的卡路里,方便人们随时监控自己的健身强度、运动水平和新陈代谢。 早期的机械式计步器利用人走动时产生的振动触发机械开关检测步伐,虽然成本低,但是准确度和灵敏度都很低,体积较大,且不利于系统集成。随着MEMS 技术的发展,基于MEMS 技术的惯性传感器得到迅速发展,其具有价格低、体积小、功耗低、精度高的特点,利用MEMS 加速度传感器设计的电子计步器,通过测量人体行走时的加速度信息,经过软件算法计算步伐,可以克服机械式计步器准确度和灵敏度低的缺点,可准确地检测步伐,同时还可以输出运动状态的实时数据,对运动数据进行采集和分析。 本文基于LIS3DH[1]加速度传感器设计了一种电子式计步器,该传感器是意法半导体( ST) 公司的三轴重力加速度传感器,可以精确测得人行走时的步态加速度信号,具有功耗低、精确度和灵敏度高的特点。
步态分析
步态分析 一、概述 行走就是人体躯干、骨盆、下肢以及上肢各关节与肌群得一种周期性规律运动,步态就是指行走时人体得姿态,就是人体结构与功能、运动调节系统、行为以及心理活动在行走时得外在表现。正常得步态有赖于中枢神经系统以及骨骼肌肉系统得正常、协调工作,当中枢神经系统或/与骨骼肌肉系统因疾病或损伤而受到损害时,就有可能出现步态得异常。步态分析就是利用力学得概念与人体解剖、生理学知识对人体行走功能状态进行对比分析得一种生物力学研究方法。 (一)步态分析步骤 1、描述研究对象得步态模式与步态参数,并与正常步态进行比较找出其差异; 2、分析出现差异得原因,研究产生异常步态得机制; 3、确定改善步态得治疗方案,包括步态训练得方法、假肢或矫形器得装配、助行器得选择。 (二)步态分析方法 1.运动性步态分析对步行得运动模式或步行时身体节段间得相关进行描述,此类分析既可定性也可定量,临床上应用简单,易于开展,后面将详细介绍。 2.动力性步态分析需要具备专业得知识技术与昂贵得专用设备,目前在我国只有少数单位开展了此项工作,社区中不可能开展,此处不予介绍。 二、正常步态 (一)步态周期 行走过程中,从一侧足跟着地到该侧足跟再次着地所经历得时间称为一个步态周期。在一个步态周期中,每侧下肢都要经历一个离地腾空并向前迈步得摆动相(迈步相)与一个与地面接触并负重得站立相(支撑相)。摆动相就是指从足尖离地到足跟着地,足部离开支撑面得时间,约占步态周期得40%;站立相就是指从足跟着地到足尖离地,即足部支撑面与地板接触得时间,约占步态周期得60%。其中,重心从一侧下肢向另一侧下肢转移,双侧下肢同时与地面接触得时间称之为双支撑相,一个正常步态周期中会出现两次双支撑相,各占步态周期得10%。详见图1。 图1 步态周期示意图
加速度与位移
加速度与位移 1.速度和时间的关系 (1)速度公式 由加速度的定义公式a =t v v o t -,可得匀变速直线运动的速度公式为:t v =0v +at t v 为末速度,0v 为初速度,a 为加速度. 此公式对匀加速直线运动和匀减速直线运动都适用.一般取初速度0v 的方向为正方向,加速度a 可正可负.当a 与0v 同向时,a >0,表明物体的速度随时间均匀增加;当a 与0v 反向时,a <0,表明物体的速度随时间均匀 减小. 当a =0时,公式为t v =0v 当0v =0时,公式为t v =at 当a <0时,公式为t v =0v -at (此时α只能取绝对值) 可见,t v =0v +at 是匀变速直线运动速度公式的一般表示形,只要知道初速度0v 和加速a ,就可以计算出 各个时刻的瞬时速度. 2.位移和时间的关系 (1)平均速度公式 做匀变速直线运动的物体,由于速度是均匀变化的,所以在某一段上的平均速度应等于初、末两速度的平均 值,即2 t o v v v += 此公式只适用于匀变速运动,对非匀变速运动不适用.例如图2-14中甲物体在前5s 内的平均速度为3m / s ,乙物体在4s 内的平均速度为3m /s (2)位移公式 22 1)(212at t v t at v v t v v t v s o o o t o +=++=+== s 为t 时间内的位移. 当a =0时,公式为s =0v t 当0v =0时,公式为s = 221at 当a <0时,公式为s =0v t -22 1at (此时a 只能取绝对值).
可见:s =0v t+2 1a 2t 是匀变速直线运动位移公式的一般表示形式,只要知道运动物体 的初速度0v 和加速度a ,就可以计算出任一段时间内的位移,从而确定任意时刻物体所在的位置. 一、选择题: 1.一物体做匀变速直线运动,下列说法中正确的是( ) A .物体的末速度与时间成正比 B .物体的位移必与时间的平方成正比 C .物体速度在一段时间内的变化量与这段时间成正比 D .匀加速运动,位移和速度随时间增加;匀减速运动,位移和速度随时间减小 2.物体做直线运动时,有关物体加速度,速度的方向及它们的正负值说法正确的是( ) A .在匀加速直线运动中,物体的加速度的方向与速度方向必定相同 B .在匀减速直线运动中,物体的速度必定为负值 C .在直线线运动中,物体的速度变大时,其加速度也可能为负值 D .只有在确定初速度方向为正方向的条件下,匀加速直线运动中的加速度才为正值 3.物体以2m/s 2的加速度作匀加速直线运动,那么在运动过程中的任意1S 内,物体的( ) A .末速度是初速度的2倍 B .末速度比初速度大2m/s C .初速度比前一秒的末速度大2m/s D .末速度比前一秒的初速度大2m/s 4.原来作匀加速直线运动的物体,若其加速度逐渐减小到零,则物体的运动速度将( ) A .逐渐减小 B .保持不变 C .逐渐增大 D .先增大后减小 5.汽车以20 m/s 的速度做匀速直线运动,刹车后的加速度大小为5 m/s 2,那么开始刹车6 s 汽车的速度大 小为( ) A. 20 m/s B. 0 m/s C. —10 m/s D. 5 m/s 6.关于自由落体运动,下面说法正确的是( ) A .它是竖直向下,v 0=0,a=g 的匀加速直线运动 B .在开始连续的三个1s 内通过的位移之比是1∶3∶5 C .在开始连续的三个1s 末的速度大小之比是1∶2∶3 D .从开始运动起依次下落4.9cm 、9.8cm 、14.7cm ,所经历的时间之比为1∶2∶3 7.甲、乙两车某时刻由同一地点沿同一方向开始做直线运动,若以该时刻作为计时起点,得到两车的x t 图象 如图所示,则下列说法正确的是( ) A .1t 时刻乙车从后面追上甲车 B .1t 时刻两车相距最远 C .1t 时刻两车的速度刚好相等 D .0到1t 时间内,乙车的平均速度小于甲车的平均速度 第7题图