无人驾驶电动游览车底盘集成控制研究

2007年(第29卷)第8期
汽 车 工 程Aut omotive Engineering
2007(Vol .29)No .8
2007158
无人驾驶电动游览车底盘集成控制研究
修改稿收到日期为2007年6月28日。
王 伟
1,2
,陈 慧1,刁增祥
2
(11同济大学汽车学院,上海 201804; 21总装汽车试验场,南京 210028)
[摘要] 介绍了具有自动寻迹行驶和遥控行驶2种模式的无人驾驶电动游览车,该车采用光电传感器自动辨
识行驶路径,自动完成寻迹行驶,且在自主行驶过程中通过超声波传感器探测技术自动检测障碍物信息,具有防碰撞功能,在底盘控制上实现了无人驾驶技术、轮毂电机驱动技术和线控转向技术以及防碰撞技术等的集成控制,对于实现车辆的智能驾驶具有重要意义。
关键词:无人驾驶;轮毂电机驱动;线控转向;底盘集成控制
A Study on I ntegrated Chassis Contr ol for Un manned Electric Touring Vehicle
W ang W e i 1,2
,Chen Hu i 1
&D i a o Zengx i a ng
2
11College of Auto m obile,Tongji U niversity,Shanghai 201804; 21A uto m otive P roving Ground of D epart m ent of General Equip m ent,N anjing 210028
[Abstract] An unmanned electric t ouring vehicle with t w o driving modes (aut omatic path tracking and re 2
mote contr ol )is p resented .The vehicle uses phot oelectric sens ors t o aut omatically identify the driving path and uti 2lizes the ultras onic sens ors t o aut omatically detect the obstacle inf or mati on in the course of aut onomous driving,s o possessing the collisi on avoidance functi on .I n additi on,the integrated chassis contr ol,covering the technol ogies of un manned driving,in 2wheel mot or driving,steer 2by 2wire and collisi on avoidance is realized,having a great signifi 2cance f or achieving intelligent driving of vehicles .
Keywords:Unmanned dr i v i n g;I n 2wheel m otor dr i v i n g;Steer 2by 2w i re;I n tegra ted cha ssis con trol
前言
先进的车辆控制系统(AVCS )是智能交通系统(I TS )的重要组成部分[1-2],无人驾驶技术是实现车辆先进控制和智能驾驶的集中体现,对于研发智能交通系统和主动安全辅助驾驶系统具有重要意义。电动汽车在节能和环保方面具有无与伦比的优势,是未来汽车的发展方向。轮毂电机驱动电动汽车由于在动力源配置、底盘结构等方面具有独特的技术特征和优势,近年来得到快速发展。
文中介绍的无人驾驶电动游览车是在轮毂电机驱动电动汽车的基础上研发的智能电动汽车,该车
没有转向盘、加速和制动踏板以及驾驶员,与传统汽车在结构上具有明显的差异(图1)。该车具有自动寻迹行驶和遥控行驶2种模式,且在自主行驶过程中通过超声波传感器探测技术自动检测障碍物信
息,具有防碰撞功能。该车在底盘控制上实现了无人驾驶技术、轮毂电机驱动技术和线控转向技术以及防碰撞技术等的集成控制,文中主要介绍该车在底盘系统组成和集成控制方面开展的部分研究工作。
图1 无人驾驶电动游览车
1 车辆底盘系统组成
?682 ?汽 车 工 程2007年(第29卷)第8期
无人驾驶电动游览车底盘由传感器、集成控制系统和执行机构以及电源系统等组成(图2),其中传感器包括路径传感器、防撞传感器、启/停、遥控等系统;执行机构包括轮毂电机驱动、线控转向、液压制动以及灯光和喇叭等系统;电源系统主要为控制系统和车辆部件供应电能,控制系统主要将各系统进行集成控制并使车辆按预定模式行驶
。
图2 无人驾驶电动游览车底盘系统组成图
111 路径传感器系统
路径传感器系统主要由光源、光电传感器、信号采集板和电源等部分组成。光源部分采用高亮白光LED,共48个。光电传感器部分采用2%精度硫化
镉光敏电阻共40个,等距7168mm 排列。信号采集为2块8位单片机,每块单片机负责20个通道数据的采集和发送,采样频率2m s 。电源部分为光源和传感器供电,输入电压DC12V ,输出电压DC5V ,主要由稳压器和2个电容组成。
光源的灯光照射到白纸和地面上后,由于白纸和地面对可见光的反射程度不同,因此光电传感器测得的反射光强度就不同,对应位置处传感器的输出电压也不同,从而可以根据传感器的输出电压来判断车辆与白线的相对位置。112 防撞传感器系统
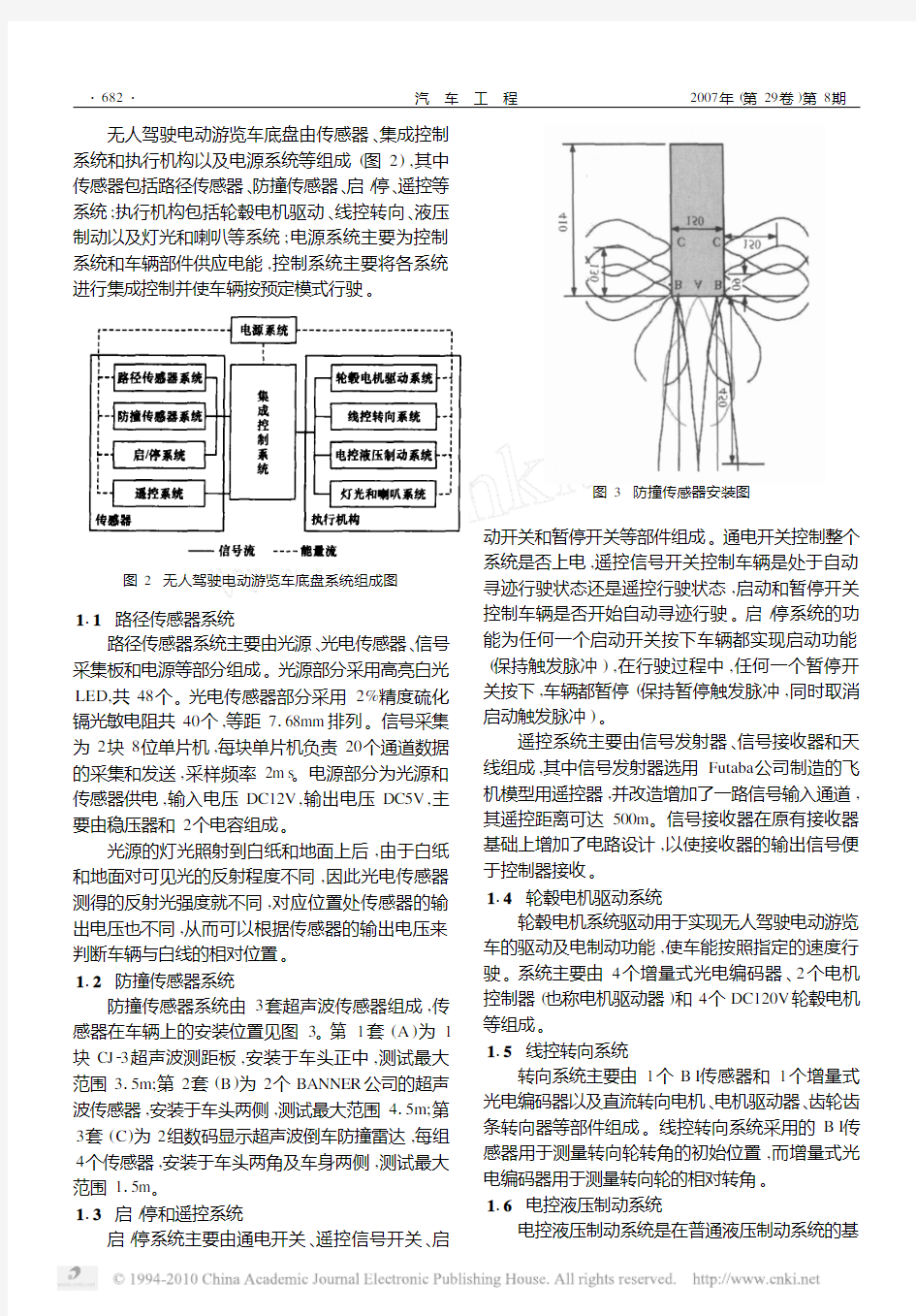
防撞传感器系统由3套超声波传感器组成,传
感器在车辆上的安装位置见图3。第1套(A )为1块CJ 23超声波测距板,安装于车头正中,测试最大范围315m;第2套(B )为2个BANNER 公司的超声波传感器,安装于车头两侧,测试最大范围415m;第3套(C )为2组数码显示超声波倒车防撞雷达,每组4个传感器,安装于车头两角及车身两侧,测试最大
范围115m 。
113 启/停和遥控系统
启/停系统主要由通电开关、遥控信号开关、
启
图3 防撞传感器安装图
动开关和暂停开关等部件组成。通电开关控制整个
系统是否上电,遥控信号开关控制车辆是处于自动寻迹行驶状态还是遥控行驶状态,启动和暂停开关控制车辆是否开始自动寻迹行驶。启/停系统的功能为任何一个启动开关按下车辆都实现启动功能(保持触发脉冲),在行驶过程中,任何一个暂停开关按下,车辆都暂停(保持暂停触发脉冲,同时取消启动触发脉冲)。
遥控系统主要由信号发射器、信号接收器和天线组成,其中信号发射器选用Futaba 公司制造的飞机模型用遥控器,并改造增加了一路信号输入通道,其遥控距离可达500m 。信号接收器在原有接收器基础上增加了电路设计,以使接收器的输出信号便于控制器接收。114 轮毂电机驱动系统
轮毂电机系统驱动用于实现无人驾驶电动游览车的驱动及电制动功能,使车能按照指定的速度行驶。系统主要由4个增量式光电编码器、2个电机控制器(也称电机驱动器)和4个DC120V 轮毂电机等组成。115 线控转向系统
转向系统主要由1个B I 传感器和1个增量式光电编码器以及直流转向电机、电机驱动器、齿轮齿条转向器等部件组成。线控转向系统采用的B I 传感器用于测量转向轮转角的初始位置,而增量式光电编码器用于测量转向轮的相对转角。116 电控液压制动系统
电控液压制动系统是在普通液压制动系统的基
2007(Vol .29)No .8王伟,等:无人驾驶电动游览车底盘集成控制研究?683 ?
础上,将制动主缸的制动踏板促动改为电动推杆促动。该液压制动系统主要由直流电机驱动器、电动推杆和钳盘式制动器等组成,电动推杆由直流有刷电机和减速机构组成。电动推杆中直流电机的转动经过减速机构作用后转变为推杆的平动,推动主缸活塞产生制动液压,从而完成整车的制动过程。117 灯光和喇叭
灯光系统主要由大灯、转向灯、制动灯和倒车灯等组成,灯光的变化符合正常驾驶习惯,例如车辆转向时相应的转向灯闪烁,制动时制动灯亮。当防撞传感器检测到障碍处于危险范围时,车辆自动鸣笛报警。
2 底盘集成控制系统
无人驾驶电动游览车处于自动寻迹行驶模式时,车辆将利用路径传感器自动辨识行驶路径,在控制器的控制下自动完成寻迹行驶,且在自主行驶过程中可通过防撞传感器探测技术自动检测障碍物信息,具有防碰撞功能。当处于遥控行驶模式时,车辆可人工手动遥控行驶。211 集成控制原理
底盘集成控制系统主要由dSP ACE 公司的2块M icr oAut oBox 控制器组成,M icr oAut oBox 控制器可
对车辆实现实时控制,可与Matlab /Si m ulink 进行无
缝衔接,可以进行各种控制算法设计和软件设计。
集成控制器的总体控制原理见图4,2块控制器之间采用CAN 通信。M icr oAut oBox1为主控器,其主要处理遥控、线控转向、液压制动、启/停、防撞和光电传感器以及主要控制程序等信号,并将驱动速度指令通过CAN 发送给Box2。M icr oAut oBox2主要处理轮毂电机驱动和灯光喇叭等系统的控制,并可用于控制系统的功能扩展
。
图4 集成控制系统总体控制原理图
光电传感器系统的控制原理见图5,由于光电传感器的信号通道为40路,而控制器的A /D 输入口相对缺乏,因此需要将传感器信号通过单片机系
统采集之后再转发给控制器。单片机将所有通道的采集结果通过3个8B CAN 标准数据帧发送给控制器
。
图5 路径传感器系统控制原理图
轮毂电机系统的控制原理如图6所示,总体上是速度闭环控制。集成控制器给出的指令车速与由
光电编码器测得的实际车速相比较,其差值通过力矩转换后得到电机驱动/制动力矩,将此力矩指令传给电机控制器,电机控制器则输出相应的电流来控制轮毂电机,从而控制车辆按给定的车速运动
。
图6 轮毂电机系统控制原理图
线控转向系统的控制原理见图7,总体上是角度闭环控制。集成控制器给出的角度指令与B I 传感器和光电编码器测得的实际转角的差值,经过力矩转换后作为力矩指令输出到电机驱动器,电机驱动器输出相应的电流指令驱动转向齿轮执行电机,从而实现预定的转角
。
图7 线控转向系统控制原理图
电控液压制动系统总体上采用开环控制,而电
动推杆的控制采用直流电机控制器对直流电机进行电流闭环控制,其两个输入端的电压差信号有效,而且差值的符号确定了控制器输出电流的方向,输入电压差信号与输出电流的放大倍数可以通过控制器上的电位计调整。
当车辆处于遥控行驶模式时,信号发射器发出
的信号给接收器,接收器将信号传输给控制器,控制
器根据接收到的信号来控制轮毂电机、线控转向和电控液压制动以及灯光喇叭等系统。212 集成控制设计
?684 ?汽 车 工 程2007年(第29卷)第8期
控制系统的集成控制主要体现在:(1)进行行驶模式和工况设计,控制车辆按预定模式和工况行驶,并可自动适应行驶模式和工况的切换;(2)在行驶过程中将车辆的线控转向系统、轮毂电机驱动系统以及电控液压制动系统进行协调控制,实现车辆的无人自动驾驶,同时在行驶过程中控制灯光和喇叭等附件系统,使灯光和喇叭符合行驶习惯要求;(3)在寻迹行驶模式下,可根据路径传感器的检测结果自动识别行驶路径,并可根据“驾驶员”预瞄控制驾驶原理,实现车辆的自动寻迹行驶功能;(4)在寻迹行驶模式下,可自动检测障碍物信息,自动实现车辆的防撞功能。21211 行驶模式设计图8 行驶模式设计流程图
无人驾驶电动游览车共有遥控行驶和自动寻迹行驶2种行驶模式,具体可分为遥控、启/停、防撞和寻迹行驶等4种工况。各种工况的优先级设计为:遥控>启/停>防撞>寻迹,行驶模式设计流程图见图8。
在车辆实际的行驶
过程中,控制器上电后将首先判断车辆是否处于人工遥控控制模式,若否
则进入自动寻迹行驶模
式。此时若按下任一个启动开关,车辆将自动寻迹行驶,在行驶过程中若检测到障碍物处于危险距离内,车辆会自动减速直至停车,在障碍物离开后自动恢复寻迹行驶。在自动寻迹行驶过程中的任何时机按下暂停开关,车辆都会停车,直到启动开关重新按下为止。系统整个程序循环执行的周期为2m s,可满足车辆实时控制的需要。
当车辆处于人工遥控行驶模式时,控制器将接收遥控器的指令,设计的遥控程序主要用于实现车辆的模式切换,并在遥控模式时使控制器在接收到遥控器指令后延迟1s 反应。21212 无人自动行驶无人驾驶电动游览车通过2块M icr oAut oBox 控制器协调控制车辆的线控转向、轮毂电机驱动和电控制动等系统,实现车辆的无人自动行驶,其控制结构见图9。21213
自动寻迹行驶
图9 无人自动行驶控制结构
集成控制器首先根据光电传感器系统40路检
测数据来自动辨识行驶轨迹,控制器将40路通道分别赋予相应的数字y i =i (i =1,2,…,40),将接收的40路数据U i 分别与预先设定的阈值U 比较取相应的a i 为
a i =
1 U i >U
0 U i ≤U
(1)则行驶路径与车辆纵向中轴线的横向偏差Δy 为
Δy =b
∑40
i =1
y i
a i
/∑40
i =1
a
i
-20
(2)
式中b 为相邻两路光电传感器的间隔距离。图10 车辆根据预瞄点行驶示意图
在得出预瞄点P 点相对于车辆纵向中轴线的横向偏差后,车辆自动跟踪预瞄点行驶的示意图见图10,图中x 0轴方向为车辆行驶的理想轨迹,SP 点为车辆质心,D 为预瞄点与前轴中心的距离,y P 和y S P 分别为预瞄点和质心行驶轨迹与理想轨迹的横向偏差。控制系统自动寻迹行驶的转向控制原理见图11,其中θ是为弥补偏差Δy (即图10中的y P )折算到车辆齿轮齿条转向系转向小齿轮需要转过的角度,δ为弥补偏差Δy 折算到车辆左前轮的转角。当
2007(Vol .29)No .8王伟,等:无人驾驶电动游览车底盘集成控制研究?685 ?
车辆寻迹行驶时,控制器自动实现预瞄点偏差为0的转向控制策略,从而使车辆能够沿预定轨迹自动行驶
。
图11 控制系统自动寻迹行驶控制原理图
文中采用的2自由度车辆模型见文献[3],传感器P 处的模型“驾驶员”线性控制模型见文献[4]。自动寻迹过程中车速首先保持为恒速,在防撞
传感器检测到障碍物处于危险范围时,车辆自动减速直至停车。在障碍物移开后,车辆又自动恢复为恒速行驶。当按下暂停开关时,车速降为0实现电机制动,同时电动液压制动系统开始工作实现车辆的可靠停车。当启动开关按下时,液压制动系统的电动推杆拉回,车辆的液压制动解除。21214 自动防撞功能
在自动寻迹行驶过程中,利用3套超声波雷达传感器来实时检测障碍物信息,超声波测距算法为
S =
ct
2
(7)c =20
273+T
(8)
式中S 为传感器到障碍物的距离,m;c 为超声波在空气中的传播速度,m /s;t 为超声波在空气中从传感器到障碍物往返一次的时间,s;T 为空气温度,℃。
集成控制器接受3套超声波雷达传感器检测的数据,并将数据与预定阈值进行实时比较,任一数据达到阈值即启动防撞功能。其中第1套传感器的阈值设为2m ,第2套传感器的2个阈值均为1m ,第3套传感器的2个阈值(每组一个阈值)均为015m 。
3 试验结果
实车试验中路径传感器测取的路径和背景的信号见图12,图中为路径传感器分别测取的背景和路径信号的一组数据,从图中可以看出,设计的光电传感器系统可容易地辨识路径,采用的阈值为U =130。
实车试验的路径见图13,试验过程中车辆沿路径逆时针行驶一周,车速保持5k m /h 。图
14为试验
图12 路径传感器信号对比(路径和背景)
过程中偏差与转角指令的变化曲线,从图中可以看
出,在偏差变化时控制器转角指令会随之迅速变化,具有很好的响应性。图15为测得的转角指令与实际转角的差值,从图中可以看出转角指令与实际转角的偏差在0值附近摆动,其幅值基本不超过20°(即前轮转角误差不超过1145°
),控制精度较高。
图13 车辆试验的路径
图14 路径偏差与转角
指令变化曲线
图16为车辆以2km /h 的恒速沿预定路径行驶时车辆的速度指令变化曲线图,在105s 时防撞传感器检测到障碍物,车辆速度迅速降为0,
从而说明无人驾驶电动游览车可有效实现自动防撞功能。
图
15 转角指令与实际
转角之差的变化
图16 速度指令变化曲线
(105s 时有障碍)
(下转第697页)
2007(Vol.29)No.8李以农,等:车辆转向与驱动综合控制及横向速度观测器的设计?697
?
吻合,所设计的综合控制器以状态观测器作为状态输入也可以取得较好的控制效果;
(3)由于建模时没有考虑垂直动力学和侧倾对控制系统的影响,与实际模型有一定差距。
参考文献
[1] 马莹,李克强,高峰,郭磊,连小珉.改进的有限时间最优预瞄
横向控制器设计[J].汽车工程,2006,28(5):433-438.
[2] H ir oyuki H irano,Yasunori Kawai,Masayuki Fujita.Aut omated
D riving f or an Experi m ental Vehicle U sing V isual Feedback Con2
tr ol[C].SI CE Annual Conference in Fukui,2003:1016-1021.
[3] Tan H S,et al.Devel opment of an Aut omated Steering Vehicle
Based on Roadway Magnets2a Case Study of Mechatr onic Syste m
Design[J].I EEE/AS ME Trans portati on on Mechatr onics(S1083
-4435),1999,4(3):258-272.
[4] 周俊,姚长英.智能车辆横向控制研究[J].机器人,2003,25
(1):26-30.
[5] 阮久宏,付梦印,李贻斌,邓志红.基于模糊逻辑和G A的智能
车辆横向控制算法仿真研究[J].系统仿真学报,2004,16
(10):2248-2256.
[6] Yanakiew D iana,et al.Longitudinal Contr ol of Aut omated CHVS
with Significant Actuat or Delays[C].Porc.of the36th I EEE Conference on Decisi on and Contr ol.1997:4756-4763.
[7] 李以农,郑玲,谯艳娟.汽车纵向动力学系统的模糊P I D控制
方法[J].中国机械工程,2006,17(1):99-103.
[8] Hung Pha m,et al.I ntegrated Maneuvering Contr ol f or Aut omated
H ighway System s Based on a Magnetic Reference/sensing Syste m
[R].Calif ornia P AT H Research Report,1995,UCB2I TS2PRR295
-12:14-30.
[9] 郭孔辉.汽车操纵动力学[M].长春:吉林科技出版社,2002.
[10] 余志生.汽车理论[M].北京:机械工业出版社,1995.
[11] Pacejka H B,Bakker E.Tyre Modeling f or U se in Vehicle Dy2
na m ics Studies[C].S AE Paper870421.
[12] Meihua Tai,Masay oshi T o m izuka.RobustLateral Contr ol of Heav2
y Duty Vehicles:Final Report[R].California P ATH Research.
Report,2003,UCB2I TS2PRR-2003-24:6-10.
[13] S war oop D,Hedrick J K,Yi p P P,et al.Dyna m ic Surface Con2
tr ol f or a Class of Nonlinear Syste m s[J].I EEE Transacti ons on
Aut omatic Contr ol(S0018-9286).2000,45(10):1893-1899.
(上接第685页)
4 结论
对无人驾驶电动游览车底盘系统进行了集成设计和研究,整车具有自动寻迹行驶和遥控行驶2种行驶模式。在自动寻迹行驶时,车辆采用光电传感器作为路径传感器来自动检测车辆的预定行驶轨迹,采用dSP ACE实时控制器实现了电动汽车轮毂电机驱动系统、线控转向系统和电控液压制动系统以及灯光喇叭系统等的初步集成控制,并采用超声波雷达传感器自动检测车前和车侧障碍物信息,实现了车辆自动行驶中的被动防碰撞功能。在遥控行驶时,车辆可根据遥控器的指令进行相应的动作。经仿真试验和实车试验验证,该车集成控制技术方案可行,车辆自动行驶操纵稳定性好,转向轮控制精度约为±1145°。
参考文献
[1] Lee Hyeongcheol,Tom izuka Masayoshi.Adap tive Vehicle Tracti on
Force Contr ol f or I ntelligent Vehicle H ighway Syste m s(I V HSs)
[J].I EEE Transacti ons on I ndustrial Electr onics,2003,50(1):
37-47.
[2] Steven E.Shladover,et al.Aut omatic Vehicle Contr ol Devel op2
ments in the P ATH Pr ogra m[J].I EEE Transacti ons on Vehicular
echnol ogy,1991,40(1):114-130.
[3] 余志生,汽车理论(第3版)[M].北京:机械工业出版社,
2001:116-118.
[4] 米奇克.M.汽车动力学(C卷)[M].陈荫三,译.北京:人民交
通出版社,1997:145-146.
无人驾驶技术及发展现状
无人驾驶汽车的发展现状及展望 摘要:作为未来汽车的发展方向,无人驾驶汽车已经得到社会各方面的关注。本文介绍了国内外无人 驾驶汽车的发展历程,对当前无人驾驶汽车的先进技术进行了分析,最后针对物联网对无人驾驶汽车发展的影响做出了推断。 关键词:无人驾驶汽车、现状、趋势 0 引言 自汽车发明以来,汽车工业就不断促进着人类的创新与社会经济的发展。随着汽车产量与保有量的提高,人们的出行变得方便快捷,而由此带来的交通拥堵与交通事故也成为了人类社会文明的一大阻碍。随着计算机控制技术的发展,越来越多的自动控制技术被应用在汽车上,无人驾驶汽车也成为了汽车产业的一大变革。 无人驾驶汽车也被称为自动驾驶汽车或轮式移动机器人。它在没有人类输入的情况下,通过车载传感器感知周围环境,并根据所获取的信息,依靠车内以计算机系统为主的智能驾驶仪实现驾驶[1]。它一般是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。 1 国外无人驾驶发展现状 发达国家从20世纪70年代开始进行无人驾驶汽车研究,目前在可行性和实用性方面,美国和德国走在前列。美国是世界上研究无人驾驶车辆最早、水平最高的国家之一。早在20世纪80年代,美国就提出自主地面车辆(ALV)计划,这是一辆8轮车,能在校园的环境中自主驾驶,但车速不高。美国其它一些着名大学,如卡耐基梅隆大学、麻省理工学院等都先后于20世纪80年代开始研究无人驾驶车辆。然而,由于技术上的局限和预期目标过于复杂,到20世纪80年代末90年代初,各国都将研究重点逐步转移到问题相对简单的高速公路上的民用车辆的辅助驾驶项目上。1995年,一辆由美国卡耐基梅隆大学研制的无人驾驶汽车Navlab2 V完成了横穿美国东西部的无人驾驶试验。在全长5000 km的美国州际高速公路上,整个实验96%以上的路程是车辆自主驾驶的,车速达50~60 km /h。尽管这次实验中的Navlab2V 仅仅完成方向控制,而不进行速度控制(油门及档位由车上的参试人员控制),但这次实验已经让世人看到了科技的神奇力量。丰田汽车公司在2000年开发出无人驾驶公共汽车。这套公共汽车自动驾驶系统主要由道路诱导、车队行驶、追尾防止和运行管理等方面组成。安装在车辆底盘前部的磁气传感器将根据埋设在道路中间的永久性磁石进行导向,控制车辆行驶方向[2]。2005年,美国国防部“大挑战”比赛上,最终由美国斯坦福大学工程师们改装的一辆大众途锐多功能车经过7个半小时的长途跋涉完成了全程障碍赛,第一个到达了终点。在赛道上,无人驾驶汽车需要穿越沙漠、通过黑暗的隧道、越过泥泞的河床并需要在崎岖险峻的山道上行使,整个行程无人驾驶汽车需要绕过无数个障碍。2011年,美国内华达州通过允许无人驾驶汽车上路的法律后,谷歌成为世界上第一个获得无人驾驶汽车授权的公司。2013 年,英国政府拨款150 万英镑,用来在伦敦以北的小城米尔顿凯恩斯的道路上,进行无人驾驶汽车实地试验这些别称为豆荚的自动驾驶汽车行驶速度为19 km/h,它们将在专用道路上搭载乘客前往市区各地。英国政府希望在2015年前先投入20 辆有驾驶员管理的豆荚运营,并在2017年投入百辆无人驾驶的豆荚2013年底,美国密歇根大学批准了一项600万美元的安全驾驶项目,建造用于测试自动驾
无人驾驶汽车国内外研究概况
无人驾驶汽车国内外研究概况 无人驾驶车辆,又称为无人车、自主车、智能车辆、室外轮式移动机器人等,涉及认知科学、人工智能、机器人技术与车辆工程等交叉学科,是各种新兴技术的综合试验床与理想载体,也是当今前沿科技的重要发展方向。它既包括理论方法与关键技术的突破,也涉及到大量的工程与试验问题,其重大研究意义不仅体现在所包含的核心科学问题上,同时又反映在其重大应用前景与战略价值上,社会关注度极高。 从二十世纪的50年代起,美英德等西方国家已经开始了无人驾驶汽车的研究工作,并且在无人车的控制和商用化方面取得了一定的进展。在汽车工业非常发达的德国,各大汽车公司都资助或联合了高等院校以开发可在普通道路上行驶的无人车。目前,欧盟已经开启了一个名为CyberCars的无人车项目,以推动无人车的研究和各国间的信息共享。 在二十世纪的80年代,我国部分大学开始了无人驾驶汽车的研究工作,但是虽然起步较晚且投入不足,但也取到了一定的成果。目前从事这方面研究工作的主要是国防科技大学、军事交通学院以及清华大学等科研院所。 1 国外无人驾驶车辆研究现状 1.1 美国 美国于上世纪50年代开始对无人驾驶车辆进行研究,在1980年左右其技术得到高速发展。上世纪八十年代,美国陆军开始与国防高级研究计划局(DARPA)进行合作,开展了自主地面车辆(A VL)项目。1995年由卡耐基梅隆大学研制的Navlab-V智能车,完成了横穿美国东西部的无人驾驶试验。美国国防部门在上世纪九十年代末开始进行DEMO系列无人驾驶车辆的研制,总共研制出了十代DEMO无人车。 从2004年开始到2007年,美国国防高级研究计划局(DARPA)举办了3次无人驾驶车辆比赛,主要为了考察在复杂环境下无人驾驶车辆的自主行驶能力。2004年3月在美国西部的莫哈维沙漠(Mojave Desert)举办了首届DARPA挑战赛——崎岖地形大挑战。共有15支队伍参赛,最终没有一支车队完成比赛,其中行驶距离最远的一支队伍是卡耐基梅隆大学的Sandstorm无人驾驶车辆。 图1.1首届DARPA挑战赛中行驶距离最远的Sandstorm无人驾驶车辆
(整理)自动控制综合设计_无人驾驶汽车计算机控制系统方案
自动控制综合设计 ——无人驾驶汽车计算机控制系统 指导老师: 学校: :
目录 一设计的目的及意义 二智能无人驾驶汽车计算机控制系统背景知识三系统的控制对象 四系统总体方案及思路 1系统总体结构 2控制机构与执行机构 3控制规律 4系统各模块的主要功能 5系统的开发平台 6系统的主要特色 五具体设计 1系统的硬件设计 2系统的软件设计 六系统设计总结及心得体会
一设计目的及意义 随着社会的快速发展,汽车已经进入千家万户。汽车的普及造成了交通供需矛盾的日益严重,道路交通安全形势日趋恶化,造成交通事故频发,但专家往往在分析交通事故的时候,会更加侧重于人与道路的因素,而对车辆性能的提高并不十分关注。如果存在一种高性能的汽车,它可以自动发现前方障碍物,自动导航引路,甚至自动驾驶,那将会使道路安全性能得到极大提高与改善。本系统即为实现这样一种高性能汽车而设计。 二智能无人驾驶汽车计算机控制系统背景知识 智能无人驾驶汽车是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。目前对智能汽车的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智能车辆已经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。 通过对车辆智能化技术的研究与开发,可以提高车辆的控制与驾驶水平,保障车辆行驶的安全通畅、高效。对智能化的车辆控制系统的不断研究完善,相当于延伸扩展了驾驶员的控制、视觉和感官功能,能极促进道路交通的安全性。智能车辆的主要特点是以技术弥补人为因素的缺陷,使得即便在很复杂的道路情况下,也能自动地操纵和驾驶车辆绕开障碍物,沿着预定的道路轨迹行驶。 三系统的控制对象 (1)系统中心控制部件(单片机)可靠性高,抗干扰能力强,工作频率最高可达到25MHz,能保障系统的实时性。 (2)系统在软硬件方面均应采用抗干扰技术,包括光电隔离技术、电磁兼容性分析、数字滤波技术等。 (3)系统具有电源实时监控、欠压状态自动断电功能。 (4)系统具有故障自诊断功能。
汽车底盘控制技术的发展状况和发展趋势的研究全解
目录 摘要 1汽车底盘电子控制的理论基础和特点 2汽车底盘常见的电子控制系统 2.1汽车防抱死制动系统ABS 2.11奥迪A6汽车ABS工作原理 2.12牵引力控制系统TCS 2.13汽车动力学电子稳定控制系统ESP 3底盘电子控制网络化和全局协调化的发展趋势3.1全方位底盘控制GCC 3.2汽车开放性系统构架AUTOSAR 4汽车底盘线控技术的应用和发展趋势 4.1汽车线控技术特点 4.2线控转向系统 4.3线控制动技术 5总结与展望 参考文献 谢辞
汽车底盘控制技术的发展状况和发展趋势的研究 吴玉凯 (德州学院汽车工程学院山东德州253023) 摘要:汽车电子控制系统在汽车底盘技术中的广泛应用大大改善了汽车的主动安全性。底盘控制系统可以分为制动控制, 牵引控制,转向控制和悬架控制。介绍通过高速网络将各控制系统联成一体形成的全方位底盘控制(GCC),汽车开放性系统的构架工程(AUTOSAR)和底盘的线控技术(X2by2wire)。 关键词:底盘控制系统,主动安全性,综述 1汽车底盘电子控制的理论基础和特点 汽车底盘最主要的功能是让汽车按驾驶员的意愿行驶。从图1可以得出驾驶员通过操纵元件来传送其意向,执行量是前轮转角和车轮上的驱动力,实际起作用的是轮胎纵向力和侧向力。所以汽车底盘的原理在给定的路面系数和车轮法像力的情况下对车轮滑动率和侧偏角进行合理的控制,来调节轮胎的侧向力和纵向力,最大限度的利用好轮胎与路面之间的附着力,提高汽车的主动安全性,机动性,舒适性[1]。
图1驾驶员,轮胎力,汽车运动的相互关系 汽车底盘的电子控制相当复杂,互相影响,具有以下特点: (1)不同的控制系统经常共用同一电子原器件。如轮速传感器的信号几乎被所有底盘控制系统所使用。 (2)相同的控制目标可由不同的控制系统单独或共同控制。譬如汽车在路面上制动时,ABS,AFS,RWS,ESP控制汽车的稳定。 (3)同一个控制系统会对多个变量进行同一控制,而且拥有多个执行机构。(4)同一个控制变量同时受不同的控制系统控制。如车轮滑动率同时受ABS,ESP控制[2]。 2汽车底盘常见的电子控制系统 2.1汽车防抱死制动系统ABS(an tick brake system) 当汽车制动时,车轮滑动率在30%左右时,制动力系数越大(图2),当制动力矩再增加,制动力系数减小。车轮滑动率大于Ko时制动力系数处于非稳定区域。从侧向力系数和滑动率的关系曲线判断滑动率越小侧向力系数越大。当车轮全部抱死时,其侧向力系数为零,其失去了承受侧向力的能力,前轮如果发生这种现
无人驾驶车发展现状
第一次作业无人驾驶车发展现状 通信工程学院三班张琪学号52130322 新的时代,汽车作为人们出行的必备交通工具,为人类的日常生产生活带来极大的方便。但是,汽车的过度使用同时也给人类的生活带来了一些不好的影响,交通堵塞、交通事故时有发生。近年来,互联网技术的迅速发展给汽车工业带来了革命性变化的机会。与此同时,汽车智能化技术正逐步得到广泛应用,这项技术使汽车的操作更简单,行驶安全性也更好,而其中最典型也是最热门的未来应用就是无人驾驶汽车。 无人驾驶汽车即自动驾驶智能汽车,就是在没有人类参与的情况下,依靠车内的计算机系统,通过给车辆装备智能软件和多种感应设备,包括车载传感器、雷达、GPS 以及摄像头等,来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,随即作出反应判断,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上完成行驶。实现车辆的自主安全驾驶,安全高效地到达目的地并达到完全消除交通事故的目标。无人驾驶汽车技术以全新的驾驶方式改变了传统的驾驶体验,它把不可控制的驾驶员从驾驶位置剔除,不仅大大的提升了交通系统的效率和安全性能还使人们告别了长途的无聊驾驶,进而提高了社会的收益和保障了人身安全。 无人技术的普及,永远离不开动机和技术这两个关键因素。前一个因素是需求问题,随着市场对汽车安全和智能化的要求越来越高,越来越多的企业与科研机构也参与到这个领域;后一个因素是技术问题。目前来看,无人驾驶技术的完 全实现也只是时间问题了。 首先来了解一些国外无人驾驶汽车发展现状。国外著名汽车企业及IT 行业巨头谷歌都竞相着手研发无人驾驶汽车技术,研发进程十分迅速,不少研发车型已接近量产。在美国及欧洲,允许正在开发的自动驾驶车上路行驶正成为一种普遍现象。美国内华达、加利福尼亚、佛罗里达及密歇根州为谷歌、奥迪等正在开发的无人驾驶车发放了公路试验牌照,谷歌无人驾驶汽车已经行驶超过80 万km,实现了零事故。欧洲方面,德国向宝马发放了许可证,西班牙也允许无人驾驶汽车上路行驶。汽车企业对于全自动驾驶的观点似乎略有分歧。事实上,部
无人驾驶行业公司研究报告
1. 何为无人驾驶 1.1 概念简言之,无人驾驶汽车就是一种不需要人进行驾驶的智能汽车,也叫轮式移动机器人,即主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。 1.2 原理利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,自动规划行车路线, 控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。原理上是集自动控制、体系结构、人工智能、视觉计算等众多技术于一体。 以谷歌为例: 谷歌车顶上安装的激光测距仪在高速旋转时向周围发射64 束激光,激光碰到周围的物体并返回,便可计算出车体与周边物体的距离。计算机系统再根据这些距离数据描绘出精细的3D地形图,然后跟 高分辨率地图相结合,生成不同的数据模型供车载计算机系统使用。这样汽车就能够识别障碍,遵守交通规则。总结为四个词语就是感知、判断、执行、互联。 (1)感知——汽车的眼睛(视觉),耳朵(听觉),身体(触觉):依靠各类传感器获得环境数据,突破人类生理限制。传感器搭载数量的持续提升,使行车数据收集渠道显著拓宽; (2)判断——汽车的大脑(机器智能):根据传感器等输入数据,行车电脑取代司机主动发出控制指令;依靠芯片与算法的不断提升从而得以实现。 (3)执行——汽车的手与脚:电子装臵取代传统机械设备,根据行车电脑指令实施控制; (4)互联——汽车的远程智囊:车内网,车际网,三网融合进一步提升整个交通系统的运行效率。 2. 无人驾驶发展史 2.1 上世纪70 年代,美、英、德等开始进行无人驾驶的研究,在可行性和实用性方面取得了突破性的进展; 2.2 中国从上世纪80 年代开始进行无人驾驶汽车的研究,国防科大在1992 年成功研制出中国第辆真正意义上的无人驾驶汽车;2005 年,首辆城市无人驾驶汽车在上海交通大学研制成功; 2.3 商业领域 (1)最早进入无人驾驶领域、技术最为成熟的企业要属谷歌,它在2014 年宣布第一部具备完整功能 的自动驾驶汽车研发成功,进入商业化准备阶段;(PS;无人驾驶车已经获得了加利福尼亚州立法获批)(2)其后,通用、奥迪等无人驾驶车辆也都拿到路试资格;
电动汽车电机驱动控制策略研究
本科毕业设计(论文) () 论文题目:电动汽车电机驱动控制策略研究 本科生姓名:关海波学号:201211318 指导教师姓名:赵峰职称: 申请学位类别:工学学士专业:电力工程及管理 设计(论文)提交日期:(小四号楷体加黑)答辩日期:(小四号楷体加黑) 本科毕业设计(论文)
电动汽车电机驱动控制策略研究 姓名:关海波 学号:201211318 学院:新能源及动力工程学院专业班级:电力工程及管理1201班
指导教师:赵峰 完成日期: 兰州交通大学LanzhouJiaotongUniversity
摘要 本论文首先介绍了异步电动机的数学模型,通过坐标变换,得到了异步电动机的空间矢量等效电路。并由理想逆变器的8种开关状态入手,得到了理想逆变器的数学模型,建立了空间电压矢量的定义。并在此基础上对定子磁链和电磁转矩及空间电压矢量之间的关系进行了分析,阐述了六边形磁链轨迹和近似圆形磁链轨迹异步电动机直接转矩控制系统的结构和工作原理。 根据异步电动机直接转矩控制的工作原理,本论文在的平台下,分别搭建了六边形磁链轨迹和圆形磁链轨迹直接转矩控制系统模型。并对仿真结果进行了相应的分析,验证了异步电动机直接转矩控制策略的可行性。而且,对两种磁链轨迹直接转矩控制系统的优缺点及应用范围进行了比较。 本论文以电动汽车的电机驱动部分为研究对象,对于异步电动机的直接转矩控制技术进行了较为深入的理论研究,在电动汽车及其他相关领域的应用具有一定的参考价值。 关键词:电动汽车;电机驱动;直接转矩控制
, . . , . . , . a , a , . . :,, 目录 摘要错误!未指定书签。 错误!未指定书签。 1 绪论错误!未指定书签。 1.1国内外电动汽车的发展及现状错误!未指定书签。 2 电动汽车电机驱动系统分析错误!未指定书签。 2.1电动汽车驱动电机的特殊要求错误!未指定书签。 2.2电动汽车电机驱动系统的分类及选择错误!未指定书签。
,汽车电控作业(底盘电子控制系统)
底盘电子控制系统 1.全电路控制系统 BBW是一种全新的制动模式, BBW是一种新型的智能化制动系统,它采用嵌人式总线技术,可以与防抱死制动系统(ABS)、牵引力控制系统(TCS)、电子稳定性控制程序(ESP)、主动防撞系统(ACC)等汽车主动安全系统更加方便地协同工作,通过优化微处理器中的控制算法,可以精确地调整制动系统的工作过程,提高车辆的制动效果,加强汽车的制动安全性能。BBW以电能作为能量来源,通过电机或电磁铁驱动制动器。因此,BBW的结构简洁,更趋向于模块化,安装和维修更简单方便。 控制单元是BBW的控制核心,它负责BBW信号的收集和处理,并对信号的推理判断以及据此向制动器发出制动信号。此外,根据汽车智能化的发展趋势,汽车底盘上的各种电子控制系统将与制动控制系统高度集成,同时在功能上趋于互补。 BBW采用双重闭环控制方式,首先在各个电能制动器中都有制动力矩传感器,可以实时地监控制动力矩的大小,实现制动力矩的闭环控制。其次在制动过程中,各车轮转速传感器时刻监视着车轮的运转过程,ABS根据车轮转速传感器的信号判断车轮的运转状态。 根据目前BBW的研究成果,投入使用还需要解决一系列问题,其中主要是电能制动器结构和性能的改善。电能制动器要保证能够独立对车辆实施有效制动,必须能产生足够大的制动力矩,对内部的驱动电机(或驱动电磁铁体)、驱动力矩的传动系统、外部的供电系统提出了较高的要求。现在比较成熟的想法是提高汽车的供电电压,从原来的12 V提高到42 V,提高电压可以有效地解决BBW的能源问题。 2.后轮转向系统 RWS能主动让汽车两后轮的横拉杆相对于车身作侧向运动,使两后轮产生一转向角。RWS是由电子控制单元、传感器和执行机构等组成。其执行机构有整体式和分离式两种。整体式是指汽车两后轮的横拉杆由同一个执行机构调节;而分离式则指汽车两后轮的横拉杆由两个不同执行机构来调节。对于整体式RWS执行机构,用一个横拉杆位移传感器就能确定两后轮的转向角。但分离式RWS执行机构需要至少两个位移传感器。由于分离式RWS执行机构的元件多,两后轮的控制和协调比较复杂,现在研发更多的是整体式RWS执行机构。整体式RWS执行机构又分液压式和机电式两种。执行机构,由电动机、螺母螺杆驱动机构和安全锁止机构等组成。为了提高系统的可靠性,执行机构里安装了一个电机转角传感器和一个螺杆位移传感器。当RWS出现故障时,电动机自动锁止,两后轮的转向角不再发生变化,直到故障排除。 正常工作时,后轮的转向角是转向盘转向角和汽车行驶速度的函数。汽车低速行驶时,当转向盘的执行机构给后轮一个相应方向相反的转向角。从而使汽车在低速拐弯或停车时,转弯半径变小,使汽车转向和停车更方便快速、舒适。当汽车高速行驶时,给后轮一个与前轮转向角方向一致的转向角。汽车的前后轮同时向同一方向转向,可提高汽车的方向稳定性,特别是汽车在高速行驶换道时,汽车不必要的横摆运动会大大减小,从而增强了汽车的方向稳定性,当汽车在L2路面制动时,同系统相配合,可及时通过主动后轮转向角来平衡制动力所产生的横摆力矩,既能保持汽车的方向稳定性,又能最大限度地利用前轮的制动力,改进汽车的制动性能。 3汽车底盘的网络化技术 目前汽车上每个总成几乎是机械、电子和信息一体化装置。在系统中电子和信息
汽车底盘控制技术的现状和发展趋势
汽车底盘控制技术的现状和发展趋势 摘 要:电子控制系统在汽车底盘技术中的广泛应用极大地改善了汽车的主动安全性。常见的底盘控制系统可分为制动控制、牵引控制、转向控制和悬挂控制。介绍通过高速网络将各控制系统联成一体形成的全方位底盘控制(GCC),汽车开放性系统构架工程(AUTO SAR)和底盘的线控技术。 关键词:底盘控制系统;主动安全性;综述 一、汽车底盘的电子化技术 1.1 全电路制动系统(BBW) 控制单元是BBW的控制核心,它负责BBW信号的收集和处理,并对信号的推理判断以及据此向制动器发出制动信号。此外,根据汽车智能化的发展趋势,汽车底盘上的各种电子控制系统将与制动控制系统高度集成,同时在功能上趋于互补。 1.2 汽车转向控制系统 1.2.1 后轮转向系统(RWS) 对于整体式RWS执行机构,用一个横拉杆位移传感器就能确定两后轮的转向角。但分离式RWS执行机构需要至少两个位移传感器。由于分离式RWS执行机构的元件多,两后轮的控制和协调比较复杂,现在研发更多的是整体式RWS执行机构。整体式RWS执行机构又分液压式和机电式两种。正常工作时,后轮的转向角是转向盘转向角和汽车行驶速度的函数。汽车低速行驶时,当转向盘的执行机构给后轮一个相应方向相反的转向角。从而使汽车在低速拐弯或停车时,转弯半径变小,使汽车转向和停车更方便快速、舒适。当汽车高速行驶时,给后轮一个与前轮转向角方向一致的转向角。汽车的前后轮同时向同一方向转向,可提高汽车的方向稳定性,特别是汽车在高速行驶换道时,汽车不必要的横摆运动会大大减小,从而增强了汽车的方向稳定性,当汽车制动时,同系统相
配合,可及时通过主动后轮转向角来平衡制动力所产生的横摆力矩,既能保持汽车的方向稳定性,又能最大限度地利用前轮的制动力,改进汽车的制动性能。 1.2.2 ESPⅡ(或者ESP plus) 由于ESP系统在对轿车的行驶状态进行干涉时,只是通过对单个车轮施加制动来调节轿车的行驶稳定性。这时由脉冲制动力引起的轿车振动,乘员能够感觉到。ESPⅡ能够识别转向轮与地面之间的附着系数。如果汽车在路面两侧附着系数不同的对开路面上制动时,它朝着路面附着系数较大的一侧转动的趋势,即出现所谓的“制动器拉动”现象,在这种情况下,ESPⅡ能够通过转向轮朝路面附着系数较小的一侧作些适当的转向转动,以平衡“制动器拉动”的趋势。 二、汽车底盘的线控技术 2.1 线控转向系统 线控转向系统简称SBW(Steering ByWire System),它由具有容错功能的网络相连接的控制单元、执行器、传感器和冗余电控单元组成。不但可以自由设计汽车转向的力传递特性,而且可以设计汽车转向的角传递特性,给汽车转向特性的设计带来无限的空间。驾驶员操作转向盘时,转向盘传感器检测驾驶员的转向数据(横摆角传感器、摄像机等),向转向辅助系统ECU提供环境检测数据,转向数据和环境检测数据通过网络总线实时传送给电子控制单元ECU,ECU按照驾驶员的转向数据和环境检测数据,控制转向执行器动作实现转向,并将车轮的转角、转矩和路感等反馈给驾驶员。 2.2 线控油门(throttle by-wire) 线控油门,也称为电控油门,即发动机的油门是通过电子控制的。传统的油门控制方式是驾驶员通过踩油门踏板,由油门拉杆直接控制发动机油门的开合程度,从而决定加速或减速,驾驶员的动作与油门动作之间是通过拉杆的机械作用连接的。而线控油门用电子连接代替机械连接,驾驶员仍然通过踩油门踏板控制拉杆,拉杆不是直接连接到油门,
汽车无人驾驶调研分析报告
汽车无人驾驶调研分析报告
目录 第一节无人驾驶——当梦想照进现实 (5) 一、减少车祸发生,降低交通拥堵 (5) 二、两大技术路径:传统车企VS科技公司 (6) 第二节革新出行方式,产业链受益明确 (10) 一、市场空间广阔,商用可期 (10) 二、无人驾驶,ADAS先行 (12) 1、传感层——无人驾驶的慧眼 (15) (1)激光雷达 (15) (2)车载摄像头 (17) (3)毫米波雷达 (19) 2、决策层——无人驾驶的大脑 (21) 3、执行层——无人驾驶的手和脚 (22) 三、高精地图——无人驾驶必备组件 (23) 四、算法,无人驾驶的“大脑” (27) 第三节部分相关企业分析 (31) 一、亚太股份:全面布局ADAS产业链 (31) 二、四维图新:高精地图服务提供商 (32) 三、东软集团:深化汽车电子业务布局 (33) 四、保千里:夜视系统龙头 (34)
图表目录 图表1:无人驾驶概念图 (5) 图表2:无人驾驶两大技术路线图 (6) 图表3:谷歌历代无人驾驶汽车 (7) 图表4:谷歌无人驾驶车载设备 (8) 图表5:全球无人驾驶汽车销量(万辆) (10) 图表6:无人驾驶汽车产业链 (11) 图表7:各细分市场生命周期 (12) 图表8:ADAS细分产品渗透率 (13) 图表9:ADAS市场预测(亿美元) (14) 图表10:ADAS产业链 (14) 图表11:2011-2014年我国汽车传感器市场规模(亿元) (15) 图表12:Velodyne64线拆解图 (16) 图表13:车载摄像头产业链 (17) 图表14:全球车载摄像头销量(万只) (18) 图表15:全球毫米波雷达市场份额预测(万颗) (19) 图表16:安装在特斯拉前挡下的智能摄像头组件 (21) 图表17:Mobileye系统搭载车型数及产品销量 (22) 图表18:ABS到ESP的演进 (22) 图表19:北美ABS/ESP出货量 (23) 图表20:汽车地图系统前装市场增长迅速 (25) 图表21:2015Q4中国前装车载地图出货量市场份额 (27) 图表22:深度学习示意图 (28) 图表23:英伟达芯片扫描道路街景 (29) 图表24:英伟达DrivePX2系统数据分析处理 (29) 图表25:亚太股份无人驾驶生态圈 (31) 图表26:2015Q4中国前装车载地图出货量市场份额 (32) 图表27:东软汽车ADAS解决方案 (33) 图表28:保千里夜视仪摄录效果 (34) 表格目录 表格1:NHTSA无人驾驶分级 (5) 表格2:主要汽车品牌无人驾驶技术汇总 (8) 表格3:各地纷纷出台利好政策 (11) 表格4:ADAS功能简介 (12) 表格5:无人驾驶汽车传感器成本估计 (15) 表格6:Velodyne已量产的激光雷达型号 (17) 表格7:毫米波雷达主要型号 (19) 表格8:三种解决方案对比 (20) 表格9:无人驾驶汽车需要高精地图 (23) 表格10:巨头纷纷布局地图产业 (24)
电动汽车AFS与DYC集成控制策略研究79885824
电动汽车AFS与DYC集成控制策略研究79885824
毕业论文 题目电动汽车AFS与DYC集成控制 策略研究
南京航空航天大学 本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:电动汽车AFS 与DYC集成控制策略研究)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。 作者签名:2015年6月10日 (学号):021130207
电动汽车AFS与DYC集成控制策略研究 摘要 汽车主动安全技术经过近几十年的发展,特别是主动前轮转向(Active Front Steering, AFS)和直接横摆力矩控制(Direct Yaw Control, DYC)技术已分别被普遍应用于传统内燃机汽车上,并极大地提高了汽车操纵稳定性。但随着电动汽车的大力发展,尤其轮毂电机技术取得突破性的进展,从而使电动汽车相对于传统内燃机汽车具有更好的可控性和灵活性,并能够为AFS和DYC技术提供更为广阔的技术平台。 然而,随着人们对主动安全技术的要求变得越来越高,从而,促进了AFS和DYC集成控制的发展。但是,现阶段的AFS和DYC集成控制方法存在较大的协调控制问题,即AFS和DYC 同时工作时,两者同时产生的横摆力矩会相互影响,不仅增加了系统负担,并且降低了控制效果。因此,针对AFS和DYC集成控制方式存在的协调控制问题,本文采用了分层控制方法进行了解决,并通过滑模变结构控制理论分别对AFS和DYC控制器进行了设计,从而使汽车轮胎的侧向力在线性范围时,主要通过AFS来实现期望的横摆力矩,当汽车轮胎的侧向力超出线性范围时,超出部分将由DYC来实现。 最后,在Simulink中搭建系统的仿真模型。分别在高低速下进行双移线仿真试验,并验证了集成控制方法能够有效地跟踪期望的横摆角速度,且能弥补单个控制器同时起作用时会产生相互影响的问题。 关键词:电动汽车,车辆稳定性控制,滑模控制,s imulink仿真
无人驾驶汽车地传感器系统设计及技术展望
一、无人驾驶汽车传感器的研究背景和意义 无人驾驶汽车是人工智能的一个非常重要的验证平台,近些年成为国内外研究热点.无人驾驶汽车作为一种陆地轮式机器人,既与普通机器人有着很大的相似性,又存在着很大的不同.首先它作为汽车需保证乘员乘坐的舒适性和安全性,这就要求对其行驶方向和速度的控制更加严格;另外,它的体积较大,特别是在复杂拥挤的交通环境下,要想能够顺利行驶,对周围障碍物的动态信息获取就有着很高的要求。无人驾驶的研究目标是完全或部分取代驾驶员,是人工智能的一个非常重要的实现平台,同时也是如今前沿科技的重要发展方向。当前,无人驾驶技术具有重大的应用价值,生活和工程中,能够在一定程度上减轻驾驶行为的压力;在军事领域内,无人驾驶技术可以代替军人执行侦查、排雷、以及战场上危险环境中的任务;在科学研究的领域,无人驾驶技术可以实现外星球等极端环境下的勘探活动。无人驾驶车辆技术,又称智能车辆,即利用将无人驾驶的技术应用于车辆的控制中。 国外的无人驾驶车辆技术大多通过分析激光传感器数据进行动态障碍物的检测。代表有斯坦福大学的智能车“Junior”,利用激光传感器对跟踪目标的运动几何特征建模,然后用贝叶斯滤波器分别更新每个目标的状态;卡耐基?梅隆大学的“BOSS”智能车从激光传感器数据中提取障碍物特征,通过关联不同时刻的激光传感器数据对动态障碍物进行检测跟踪。牛津大学研制的无人车辆“WildCat”,不使用GPS,使用激光雷达和相机监控路面状况。我国相关技术开展较晚,国防科学技术大学研制的自主车“开路雄狮”,采用三维激光雷达Velodyne作为主要传感器,将Velodyne获取的相邻两激光数据作差,并在获得的差分图像上进行聚类操作,对聚类结果建立方盒模型。 无人驾驶车辆是一项融合了认知科学、人工智能、机器人技术与车辆工程等多学科的技术,涉及到电子电路,计算机视觉,自动控制,信号处理等多学科技术。无人驾驶汽车的出现从根本上改变了传统的“人——车——路”闭环控制方式,将无法用规则严格约束的驾驶员从该闭环系统中请出去,从而大大提高了交通系统的效率和安全性,是汽车工业发展的革命性产物。 二、无人驾驶汽车的传感器系统整体设计 无人驾驶汽车的实现需要大量的科学技术支持,而其中最重要的就是大量的传感器定位。核心技术是包括高精度地图、定位、感知、智能决策与控制等各个模块。其中有几个关键的技术模块,包含精确GPS定位及导航、动态传感避障系统、机械视觉三个大部分,其他的如只能行为规划等不属于传感器范畴,
汽车底盘集成控制最新技术探讨
汽车底盘集成控制最新技术探讨 文章简要介绍了汽车底盘集成控制技术中两种较为常见的基本结构和发展趋势,并深入探讨了目前国内外最新的一些汽车底盘技术,以期为今后的汽车底盘优化设计与研发工作提供可靠的参考建议。 标签:汽车底盘;集成控制技术;发展趋势;优化设计;多目标 引言 汽车底盘的核心功能是根据驾驶员的判断意识对车辆进行相应的控制,如加速行驶、缓速慢行、转向等等。目前汽车底盘控制技术最主要的发展方向是集成控制,主要体现为对集成控制的对象、策略、网络以及技术等方面的研究,对于汽车的舒适性能与制动性能有着重要的影响作用。汽车底盘集成控制主要包括制动系统、转向控制系统、悬架系统、油门系统等等。自上世纪八十年代以来,人们一直致力于研究如何让汽车底盘的各项指标更加均衡,进而提高汽车底盘系统的整体性能,成功研发出了多种底盘主动控制系统。如今,随着科学技术的日益发达,汽车底盘控制技术正不断朝着网络化、智能化、集成化的方向发展着。 1 汽车底盘集成控制结构 目前,国际上最常采用的控制结构主要有以下两种: 1.1 集中控制 所谓的集中控制是指将底盘系统中的所有信息全部汇总到一个控制单元内,进行集中处理,利用全局优化算法对所有的执行器实施统一控制,实现多目标的有效管理。在这种控制方式下,只需一个集中控制器便可对各个子系统进行控制,具有很高的集成度,能够有效缩短车辆的制动距离,减小侧偏角,主动降低驾驶员的人为输入,进而有效保证了汽车底盘的独立控制效果。 1.2 协调控制 除了集中控制,我们还应采取必要的协调控制手段,这主要是因为:一方面,控制系统如果是一个完全独立的个体很有可能会产生一些不可预期的干涉,进而影响到其极限性能;另一方面,集中控制本身就具有其固有的缺点。因此,可以先对子控制模块进行独立研发,然后再采取协调控制的方式。可见,协调控制是一种介于独立控制与集成控制之间的一种控制结构,其最大的优势在于能够充分利用各个子控制模块,借助协调控制器实现汽车底盘各个模块之间的协调工作。协调控制器会根据汽车当前的行使状态以及驾驶人的意识判断,将总操作命令分散传达至中间层的每个控制器,随后这些控制器会控制相应的执行器作出反应。简而言之,协调控制器的作用是将总控制任务按一定的要求分配至子系统中,因此,相关研究也主要是围绕如何设计出更加科学合理的分配原则而展开。
机械设计之无人驾驶汽车的发展史
汽 车 的 未 来 小组成员: 胡书明(组长)(1608100312)、何克锦(1608100311)何姜雄(1608100310)、韩雨(1608100309) 专业班级:车辆工程103班
目录 第一章无人驾驶汽车的简介 第二章无人驾驶汽车的发展状况 第一节:国外发展状况 第二节:国内发展状况 第三章无人驾驶汽车采用的技术 第一节:关键技术 第二节:目前技术 第三节:将采用的技术 第四章无人驾驶汽车的自动泊车系统第五章无人驾驶汽车的发展前景 第一节:发展方向 第二节;道德争议 第六章无人驾驶汽车即将来临 第一节:英国版:外形就像飞船 第二节:法国版:采用巡航导弹技术 第三节:德国版:外形像普通轿车 第四节:美国版:谷歌无人驾驶汽车
第一章:无人驾驶汽车的简介 无人驾驶汽车是一种智能汽车,也可以称之为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。无人驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。无人驾驶汽车从根本上改变了传统的“人—车—路”闭环控制方式,将不可控的驾驶员从该闭环系统中请出去,从而大大提高了交通系统的效率和安全性。 从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,目前在可行性和实用化方面都取得了突破性的进展。我国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出我国第一辆真正意义上的无人驾驶汽车。2005年,首辆城市无人驾驶汽车在上海交通大学研制成功,该车有望于两年之内率先在上海世纪公园进行示范运营,并在2010年世博会上一展身手。到时游客只需在公园的入口处按下一个按钮,一辆没有司机的四座敞篷汽车就会从远处开过来缓缓停下,然后搭载
电动汽车智能充电系统控制策略研究
电动汽车智能充电系统控制策略研究 发表时间:2020-04-14T07:34:25.255Z 来源:《中国电业》(发电)》2020年第1期作者:王琦[导读] 本文以电动汽车以锂离子动力电池为分析对象,研究如何改进其快速充电方法。 西安麦格米特电气有限公司陕西省西安市 710075摘要:随着电动汽车的逐渐普及,电动汽车充电桩的大规模接入会对电网的运行规划产生重大影响。提出了一种以预约为前提条件,面向用户端的电动汽车智能充电控制策略。根据充电桩实时运行状态,结合对电动汽车充电时间的预测,并充分考虑用户需求,建立了电 网控制端—计算机处理终端—智能充电桩终端—电动汽车用户端之间的信息反馈系统数学模型。通过算例分析,结果表明:采用所提出的充电控制策略,可显著提高充电系统运营效率,适用于大规模电动汽车智能充电系统。 关键词:电动汽车;充电桩;控制策略;预约;信息反馈 引言 生活水平的提高,人们的出行生活越来越多地依赖于汽车,以致汽车拥有量不断增加,从而加重了车尾气造成的环境污染,另外汽车数量的增多也使石油等资源的利用度剧增,严重造成这些能源的紧缺。这种现象严重违背了当代汽车发展中的“节能环保”主题。因此,电动汽车因具有较高的性能、较低的尾气排放和较好的续航能力等优点受到众人的青睐。因此,如何快速高效而且低损地为动力电池充电不仅对电动汽车的发展具有重要意义,而且是对电动汽车发展的重大挑战。本文以电动汽车以锂离子动力电池为分析对象,研究如何改进其快速充电方法。 1充电系统的设计 充电系统的主要设计界面主要就是实现铅酸电池组在充电过程的设计,也就是说能够让电池在较短的时间内充满汽车所需要的电量,而在较短时间完成对蓄电池的充电,对蓄电池初始状态可以做出实时的监测,那么电池在最初状态做出了检测,确定了蓄电池组的负荷状态,同时在温度和内部两端电压两个方面,蓄电池的实时监测状态对蓄电池参数实施的采样;按照蓄电池的各项指标来讲,在智能充电的过程中,处理器可以分析当前的电路对蓄电池的接入情况,从而导致蓄电池性能状况和负载区域能力共同的显示在了LCD板上,之后智能充电对于故障时会经过GSM通信通过短信的方式回馈给车主人,让车主及时地做出应有的判断,从而实现了自动化、智能化汽车充电。智能充电的基本模块包括:LCD触摸板、电源模块、数据存储模块、GSM通信模块、声光报警模块、参数检测模块这六大模块。近些年电脉冲充电方式成了充电的首选方式,正脉冲充电过程中产生的脉冲会在负电极中产生的脉冲相抵消,那么这样的现象就使得极化现象的影响减少,可以在缩短充电时间的基础上,降低在速冲过程中的危害,从而达到了真正的高效率充电。 2智能充电装置 为进一步提高本系统的智能性,分布式智能充电装置除具备传统功能(包括充电、计量、保护等)外,还实现了:(1)移动终端控制功能,通过终端App即可对启停机进行控制,用户通过移动终端即可对符合充电条件的充电装置的启停状态进行实时控制;(2)上传充电信息,包括电压、电流、电量、费率、计费、工作状态、故障等在内的充电信息会在App界面实时显示,同时充电信息由充电装置完成到服务器的上传。充电装置的控制核心为负责完成指令控制与信息分发功能的MCU,选用CORTEX系列芯片(具备低功耗、高性价比优势)完成同Wi-Fi通信模块间的通信过程(通过串口、SPI总线)及与数字电能表间的通信过程(通过485总线),同存储单元则通过I2C总线完成通信过程,并通过驱动电路同接触器相连,充电电能输出通过MCU实现通断状态的控制。相关信息的上报(电流、功率、电能)及远程控制充电装置开关状态则通过低功耗的Wi-Fi通信模块同无线网关的数据通信实现。交流电通过电源转换模块完成到直流电(包含不同电压等级)的转换。 3充电装置智能系统的设计与实现 3.1硬件框架 硬件系统主要由中央主控板、读卡器、检测芯片、显示屏、通信设备等构成,接入电网电源(380V)为AC交流电源输入,由中央处理单元进行相关操作后(包括滤波、整流、稳压等)转换为可用直流电源以供电动汽车充电使用。用户需通过IC卡识别模块完成充电装置的激活过程,系统识别IC卡用户信息(通过读卡器)后可显示余额及个人信息。状态显示包括充电模式、电流、电压、充电状态等在内的信息。作为监控系统的核心主控板的主要功能在于控制充电过程的启动/关闭及实时监控,并将数据向后台实时传输,具备工业级的温度范围,主控板具备7个串口,下位机数据检测及采集模块同备显示功能的上位机CPU模块采用串行总线完成通信过程;具备一个以太网口,采用动态的SDRAM和NAND控制器。 通过监控保护单元的设计实现对充电装置状态(包括进线输入电压、充电电压/电流、接口连接状态、车载电池状态等)的实时监测,出现异常时可及时切断电源输出,以确保充电过程的安全可靠。建设过程中为确保阴湿天气情况下的正常运行,应选择镀锌钢板作为充电装置外体材料,在外体上链接一根接地线抑制共模效应。
无人驾驶汽车转向系统控制
无人驾驶汽车转向系统控制 摘要 伴随现代科技发展,无人驾驶汽车成为了新的研究热点,引领着汽车产业的发展方向。为了保证汽车在道路上正常行驶,解决无人驾驶汽车的转向控制成为了关键性问题。而融合先进的电子技术、信息技术和控制技术的线控转向技术被越来越多的科技工作者所青睐。 本文对无人驾驶汽车转向系统控制进行了研究。本文首先对无人驾驶汽车自动转向控制的研究现状进行了分析介绍。然后根据汽车转向时驾驶员操纵方向盘的实际情况,设计了转向执行机构。根据电路原理设计控制器的电源电路、程序烧写电路、信号调理电路和电机驱动电路,并绘制电路图。在此基础上,考虑到实际实验条件限制,采用仿真实验方法。运用MATLAB中的SIMLINK建立电机模型。在电机控制选择上,为保证电机平稳运转,采用了PID闭环控制方法对电机进行控制。然后采用与CARSIM联合仿真的方法对转向系统进行了可行性实验。仿真实验结果证明,转向控制器可以有效控制仿真车进行转向。 关键词:无人驾驶汽车;线控转向;CARSIM和MATLAB联合仿真
Steering system control of unmanned vehicle Abstract With the development of modern science and technology, autonomous vehicle has become a new research hotspot, which can greatly improve the security of the transportation system. In order to ensure the normal running of the vehicle, the steering control of unmanned vehicles has become a key issue. And the integration of advanced electronic technology, information tech-nology and control technology of steer by wire technology is favored by more and more scien-tists and technicians. This paper researches the control system of unmanned vehicle steering system. This paper introduces the research status of automatic steering control for unmanned vehicles.According to the procedure of the power supply circuit, this paper designs controller programming circuit, signal conditioning circuit and motor drive circuit, and draw circuit diagram. On the basis of this, taking the actual experimental conditions into account, this paper chooses the simulation method. This paper uses MATLAB in SIMLINK to build motor model. In order to ensure the smooth op-eration of the motor, the PID closed loop control method is used to control the motor. Then this paper has focused on the method that combines with the CARSIM simulation of the steering controller for the feasibility of the experiment. The experimental results show that the steering controller can effectively control the steering of the simulation vehicle. Key words:Unmanned vehicle;SBW;CARSIM and MATLAB joint simulation