一种大曲率线状实体的三维可视化方法
第26卷,第3期国土资源遥感
Vol.26,No.32014年09月
REMOTE SENSING FORLAND &RESOURCES
Sep.,2014
doi :10.6046/gtzyyg.2014.03.07
引用格式:刘钊,
高培超,闵世平,等.一种大曲率线状实体的三维可视化方法[J ].国土资源遥感,2014,26(3):43-47.(Liu Z ,Gao P C ,Min S P ,et al.A 3D visualization method for high -curvature linear entity [J ].Remote Sensing for Land and Resources ,2014,26(3):43-47.)
一种大曲率线状实体的三维可视化方法
刘钊1,高培超1,闵世平2,赵龙2,罗智德
1
(1.清华大学土木工程系地球空间信息研究所,北京100084;
2.中铁二院工程集团有限责任公司,成都610031)
摘要:线状模型是虚拟三维场景中的重要模型,其精细程度直接影响着虚拟场景的视觉效果。制作线状模型的常用方法分为整体模型法和分段拼接法,对于弯曲程度较大的线状模型,使用整体模型法制作时难以控制顶点坐标和纹理贴图,而采用分段拼接法又会在转弯处产生模型空隙和纹理重叠,导致模型失真。该文提出了一种针对大曲率线状实体的三维可视化方法,在几何模型制作阶段,根据路径和截面数据直接计算模型顶点坐标、法向量和索引数据,实现放样建模;在纹理贴图阶段,通过建立模型顶点与纹理图片像素的映射关系,实现模型贴图。结果表明,该算法可应用于铁路路基等大曲率线状模型的制作,具有精度可靠、人工交互少及可视化效果好的特点。关键词:3D -GIS ;线状模型;三维可视化;大曲率线状实体中图法分类号:TP 75;P 208
文献标志码:A
文章编号:1001-070X (2014)03-0043-05
收稿日期:2013-07-10;修订日期:2013-09-24
0引言
近年来,
三维地理信息系统(3D -GIS )发展迅猛,其应用已逐渐从简单的三维效果演示转向复杂的三维设计与三维分析。3D -GIS 的直观表现形式为虚拟三维场景,其美观性和精确性保证了3D -GIS 的视觉效果和可信程度。
虚拟三维场景通常由三维环境和三维实体(即地物)组成,三维实体又可分为块状实体和线状实体2大类,其中线状实体模型的制作方法主要有2种:①整体模型法,将整个线状实体制作成单个模型,如文献[1]和文献[2]制作的地下管线和三维公路的整体模型;②分段模型法,只对线状实体的一段进行精细建模,然后通过拼接法将分段模型组合在一起,从而完成线状模型的制作,如文献[3]完成的铁路路基模型。
经过研究和实践,发现无论是整体模型法还是分段模型法,都存在大曲率处模型失真的问题。对于整体模型法,在模型大曲率转弯处,由于难以精确计算纹理坐标,达不到逼真的效果;对于分段模型法,在拼接模型的大曲率转弯处,2个分段模型的内侧产生模型重叠和纹理叠置的问题,而外侧出现模型空隙。因此,本文提出一种在保证大曲率线状实
体模型精度的同时,能够尽可能地实现美观、逼真效
果的三维可视化方法,具有一定的理论研究价值和实际意义。
1大曲率线状实体的可视化
大曲率线状实体可视化的原始数据可分为路径数据、横截面数据及纹理等3部分。其中路径数据和横截面数据分别描述了线状实体的走势和横截面形状,用于几何建模阶段;纹理是实体色彩属性的基础数据,用于纹理贴图阶段。本文采用的路径数据是以世界坐标系中的一系列散点(路径转点)的形式表示,横截面数据由平面笛卡尔坐标系中的一系列散点(截面顶点)表示。1.1
大曲率线状实体几何建模
大曲率线状实体几何建模的实质是根据路径数据和横截面数据计算模型上所有顶点的世界坐标值。在几何建模过程中,模型顶点总数t 取决于路径转点数L 和横截面顶点数F ,其关系为
t =LF 。
(1)
根据线状实体的特点,采用放样建模法[4]
计算模型各顶点坐标,为使几何模型能在虚拟三维场景中正常显示,应附带计算各顶点的索引值和法向量。
本文计算结果以“.x ”模型格式存储。
国土资源遥感2014年
1.1.1坐标转换与数据抽稀
为了方便表述路径与横截面之间相互垂直的位置关系,将路径与横截面的交点命名为穿透点。在放样建模之前,需通过平移操作在二维笛卡尔坐标系中调整横截面图形的位置,使穿透点与坐标系原点重合。
当路径转点间隔过小、横截面宽度过大时,容易使放样建模的“放样”过程出错,因此还需对路径数据进行适当的抽稀处理(可使用Douglas-Peucker 算法[5]或SimpliPoly算法[6]),以减小路径转点密度。1.1.2顶点坐标计算
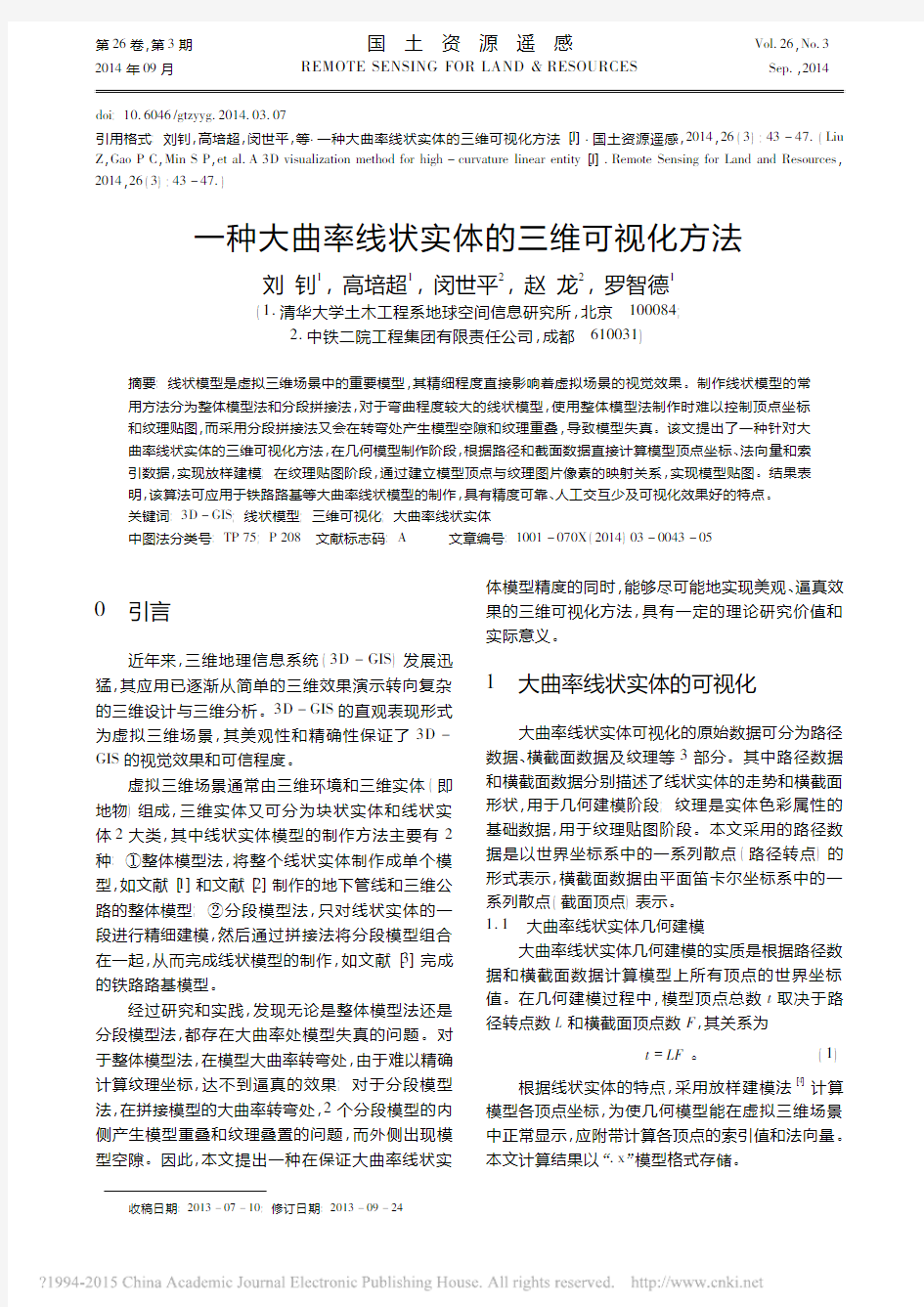
假设一条仅有4个转点(M,N,P,Q)的短路径,其中M为起点,Q为终点,N和P为中间点。假设横截面为三角形(顶点为A,B,C),如图1,其中o-xy 为模型坐标系,o1-x1y1z1为世界坐标系。在实际计算过程中,根据算法的不同,将路径转点分为起点、中间点及终点等3部分
。
图1横截面ABC和路径MNPQ
Fig.1Cross section ABC and path MNPQ
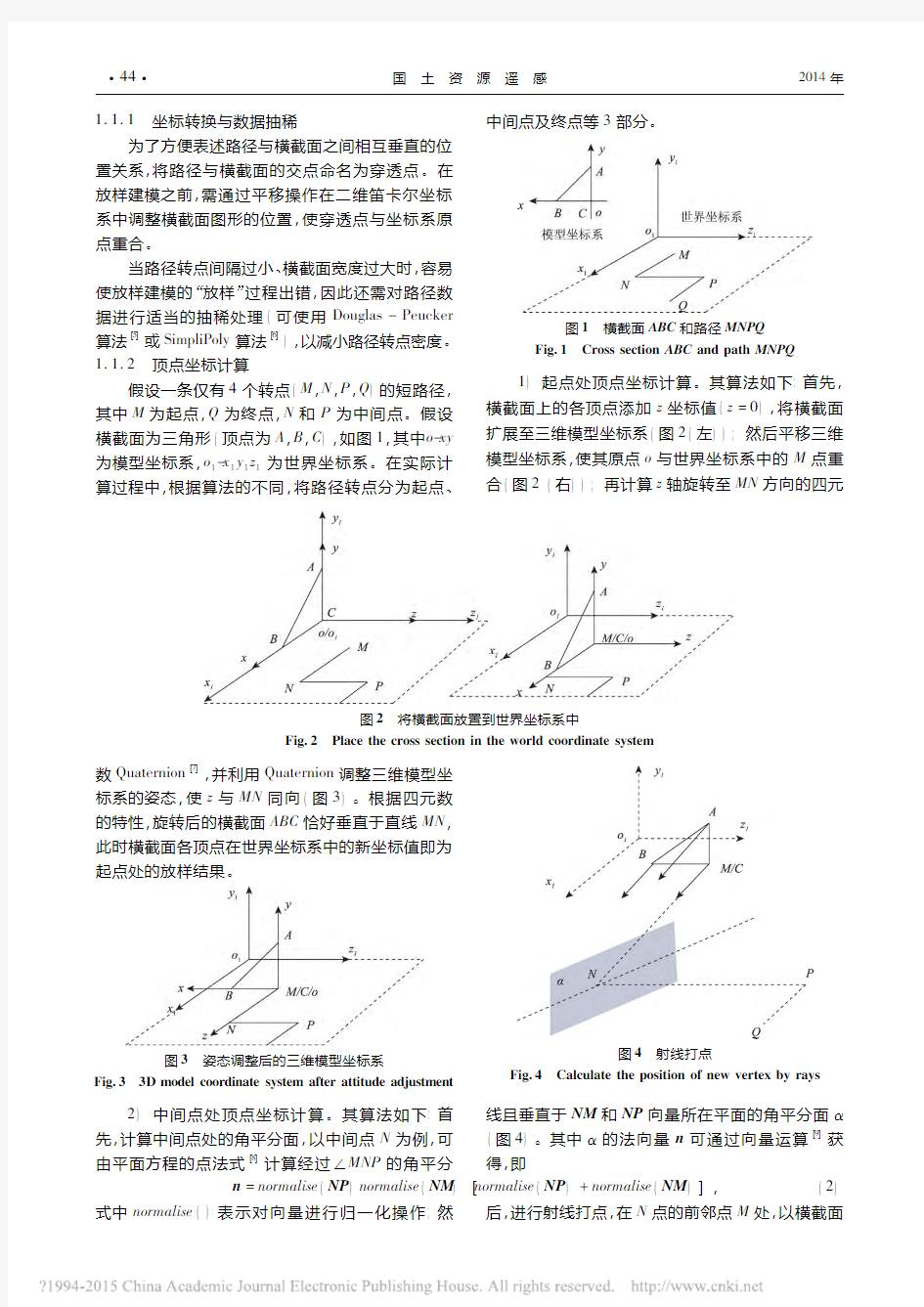
1)起点处顶点坐标计算。其算法如下:首先,横截面上的各顶点添加z坐标值(z=0),将横截面扩展至三维模型坐标系(图2(左));然后平移三维模型坐标系,使其原点o与世界坐标系中的M点重合(图2(右));再计算z轴旋转至MN
方向的四元
图2将横截面放置到世界坐标系中
Fig.2Place the cross section in the world coordinate system
数Quaternion[7],并利用Quaternion调整三维模型坐
标系的姿态,使z与MN同向(图3)。根据四元数
的特性,旋转后的横截面ABC恰好垂直于直线MN,
此时横截面各顶点在世界坐标系中的新坐标值即为
起点处的放样结果
。
图3姿态调整后的三维模型坐标系
Fig.33D model coordinate system after attitude
adjustment
图4射线打点
Fig.4Calculate the position of new vertex by rays 2)中间点处顶点坐标计算。其算法如下:首
先,计算中间点处的角平分面,以中间点N为例,可
由平面方程的点法式[8]计算经过∠MNP的角平分
线且垂直于NM和NP向量所在平面的角平分面α
(图4)。其中α的法向量n可通过向量运算[9]获
得,即
n=normalise(NP)normalise(NM)[normalise(NP)+normalise(NM)],(2)式中normalise()表示对向量进行归一化操作;然后,进行射线打点,在N点的前邻点M处,以横截面·
44
·
第3期刘钊,等:一种大曲率线状实体的三维可视化方法
顶点为起点、以MN 为方向作射线,射线条数等于
横截面顶点个数,射线与α的交点坐标,即为N 点处的模型顶点坐标。
3)终点处顶点坐标的计算。路径终点处无法求取角平分面,故由终点处的垂面代替,终点处的射线打点方法同中间点。1.1.3
索引值计算
通过索引值计算,为每个模型顶点赋予唯一的编号,通过索引号的分组,建立顶点之间的拓扑关系,从而组建空间三角网。本文采用的索引值计算方法为:以路径方向为行、以截面方向为列,从起点到终点依次为所有模型顶点编号(图5),按顺时针顺序遍历所有三角形,以顶点序号组作为最终的索引值组
。
图5将所有模型顶点按一定规则排列Fig.5
List all the vertices by some rules
1.1.4法向量计算
法向量决定了模型表面在同等光照条件下的明暗程度,可分为平面法向量和顶点法向量2类。平面法向量可由2条边向量直接叉乘而得;顶点法向量的计算可使用平均向量法[10]
、面积加权平均
法
[10]
及角度加权平均法
[11]
等方法。
考虑到由平面法向量定义的模型在光照下较为生硬、棱角明显,而由顶点法向量定义的模型在光照
下较为平滑,所以采用顶点法向量作为模型的默认法向量。在顶点法向量的计算过程中,本文采用平均向量法[10]
。
1.2
大曲率线状实体纹理贴图纹理贴图可以简化模型制作过程
[12-13]
,是三维
可视化的常用方法。目前,众多商业建模软件已集成了纹理贴图功能,用户使用方便,但对于大曲率线状实体而言,纹理贴图需要大量的人工交互,操作经验性较强,且难以产生理想的效果。本文基于纹理映射思想,实现了针对大曲率线状实体的纹理贴图算法。
1.2.1单纹理贴图模式
纹理映射的关键是建立模型顶点与纹理图像像素之间的映射关系,为简化问题,假设仅使用单张纹
理图片对大曲率线状模型进行贴图,并假设模型横截面为三角形,沿任一平行于路径的棱线l 将模型外表面拆剪并平铺。建立以棱线l 方向为x 轴,截面点连线为y 轴的辅助坐标系(图6),
其中原点o 为棱线l 与起点截面上顶点(R1,
S 1,T 1,U 1)连线的交点,
x 坐标值和y 坐标值的最大值均为1.0
。图6
辅助坐标系
Fig.6
Auxiliary coordinate system
在辅助坐标系中,不同横截面上的对应顶点的y 坐标值相同(如y T 1=y T 3),同一截面上所有顶点的x 坐标值相同(如x T 3=x R3),x 轴上任意2点间的距离等于其在世界坐标系中的空间距离。将模型顶点在辅助坐标系中的坐标值作为顶点的纹理坐标值。辅助坐标系实现了对纹理图片的伸缩和扭曲变换,使图片更适合大曲率线状模型的纹理贴图。实践表明,用这种特殊的辅助坐标系代替二维笛卡尔坐标系,能够建立更准确的纹理映射关系,从而取得更逼真的效果。1.2.2
多纹理贴图模式
线状模型的贴图特点明显,其沿路径方向的贴图往往具有重复性,而垂直于路径方向的贴图往往具有多样性。以铁路模型为例,其沿铁路中线方向有着相同的贴图,而垂直于铁路中线方向的贴图则分为左边坡、铁轨及右边坡等不同效果。多纹理贴图以单纹理贴图为基础,针对线状模型的多纹理贴图主要有图像拼接法和模型拆分法2种实现途径。图像拼接法的原理是将垂直于路径方向的多张贴图拼接成一张图片γ,然后在沿路径方向将若干张图片γ拼接成图片η,从而转换成图片η的单纹理贴图模式。
模型拆分法的原理是根据沿路径方向的贴图重复次数m ,将纹理坐标中x 分量的有效范围从1.0扩展至m ,由此实现重复性;根据垂直于路径方向的贴图变化次数v ,将横截面拆分成v 段,对每段横截面单独进行几何建模和纹理贴图操作,并以子模型形式输出,由此实现多样性。
·
54·
国土资源遥感2014年
由于计算机图形学中的模型可由多个子模型组
成,因此模型拆分法只是逻辑拆分,无需事后的组合
操作。考虑到图像拼接过程中会产生拼接误差,本
文采用模型拆分法。
2算法应用
2.1铁路路基模型
假设一条极端的圆形铁路中线,利用本文算法
制作铁路路基模型,结果如图7所示。模型外侧已
无空隙,模型内侧的纹理重叠现象也被消除,在整条
路径上,左右边坡的纹理图片均垂直于铁路中线
。
图7铁路路基模型
Fig.7Railway bed model
2.2桥梁模型
利用本文算法,可快速制作贴图复杂的桥梁主
体模型,以某桥梁为例,其可视化结果如图8所示
。
图8桥梁模型
Fig.8Bridge model
3精度评价
3.1几何精度
大曲率线状实体的几何精度主要取决于放样误差。放样误差是指放样建模过程中产生的误差,由于各棱线方向的放样原理相同,但往往只有中线方向的结点坐标已知,因此可关注中线方向的放样误差。以图7中的铁路路基模型为例,在模型制作之前,铁路中线上各结点的坐标值已知。在放样建模过程中,各结点坐标又会被重新计算,因此可使用点位精度来衡量放样误差。点位精度计算公式为
△ρ=△x2+△y2+△z
槡2,(3)式中:△x,△y,△z分别为x,y,z轴线方向的误差;△ρ为点位精度。计算结果表明△ρ的值往往为零,这说明计算公式准确,并说明代码中为变量设置了足够的精度,没有引起舍入误差,在坐标数值较小时未产生中线方向上的放样误差,从而保证了模型的几何精度。
3.2纹理精度
纹理贴图的精度多采用定性法进行评价,主要方式为目视评价。不对纹理贴图精度进行定量评价的原因如下:
1)真实建模对象的纹理极其复杂,建模过程中多采用近似贴图、重复贴图的方法对实际效果进行仿真,其贴图不具备真实性,因此无法严格地定量评价纹理贴图的精度。
2)美观和真实已经是复杂建模研究中的挑战,当前研究重点多为如何快速制作具有真实感的贴图效果,使用目视评价的方法已经足以衡量模型贴图的真实程度。
3)从铁路路基模型实例和桥梁模型实例中可以看出,本文算法已经可以解决先前算法在模型转弯处的不足,避免了模型贴图的错乱,达到了逼真的效果。
4结论
本文充分考虑大曲率线状实体的特点,研究了复杂线状实体几何建模及纹理贴图的算法,该算法可有效地用于线状实体尤其是大曲率线状实体的三维可视化技术中,所产生的模型视觉效果较好、精度优良,并在案例中得到体现。根据本文算法编写的软件系统,可大量减少当前建模软件中必需的人工交互操作,仅需用户提供路径坐标列表、横截面坐标列表并指定纹理图片,即可快速地实现三维可视化。参考文献(References):
[1]李清泉,严勇,杨必胜,等.地下管线的三维可视化研究[J].武汉大学学报:信息科学版,2003,28(3):277-282.
Li Q Q,Yan Y,Yang B S,et al.Research on3D visualization of
underground pipeline[J].Geomatics and Information Science of
Wuhan University,2003,28(3):277-282.
·
64
·
第3期刘钊,等:一种大曲率线状实体的三维可视化方法[2]左小清,李清泉,唐炉亮.公路三维模型建立与数据组织[J ]
.武汉大学学报:信息科学版,
2004,29(2):179-183.Zuo X Q ,Li Q Q ,Tang L L.3D modeling and data organization of highway [J ].Geomatics and Information Science of Wuhan Univer-sity ,2004,29(2):179-183.
[3]朱颖,闵世平,代强玲.面向铁路行业三维场景快速构建一体
化技术研究[J ]
.铁道工程学报,2011(12):4-10.Zhu Y ,Min S P ,Dai Q L.Research on 3D scene quickly reproduce facing railway industry [J ].Journal of Railway Engineering Society ,2011(12):4-10.
[4]张弓,许伟平,陈莹.沿路径放样建模在3维GIS 中的设计
与实现[J ]
.测绘与空间地理信息,2010,33(2):132-135.Zhang G ,Xu W P ,Chen Y.The design and implementation of loft modeling along path in 3D GIS [J ].Geomatics and Spatial Informa-tion Technology ,2010,33(2):132-135.[5]
Douglas D H ,Peucker T K.Algorithms for the reduction of the number of points required to represent a digitized line or its carica-ture [J ].The Canadian Cartographer ,1973,10(2):112-122.
[6]Chuon C ,Guha S ,Janecek P ,et al.Simplipoly :Curvature -based
polygonal curve simplification [J ].International Journal of Compu-tational Geometry and Applications ,2011,21(4):417-429.[7]Pletinckx D.Quaternion calculus as a basic tool in computer graph-ics [J ].The Visual Computer ,1989,5(1):2-13.
[8]Salas S ,Hille E ,Etgen G.Calculus :One and several variables [M ].
10th ed.New York :John Wiley and Sons ,2006:679-682.[9]Aarts J.Plane and solid geometry [M ].New York :Springer ,2009:
271-275.
[10]程磊,刘海艳.一种三维实体模型表面法线计算方法研究
[J ].沈阳理工大学学报,2009,28(4):25-26.
Cheng L ,Liu H Y.Research of calculating method for surface nor-mal line of 3D -entity model [J ].Transactions of Shenyang Ligong University ,2009,28(4):25-26.
[11]杨晓东,万旺根,崔滨,等.DEM 数据及其顶点法向量的压缩
编码和显示[
J ].计算机仿真,2010,27(11):221-225.Yang X D ,Wan W G ,Cui B ,et al.Compression coding and display of DEM data and its vertex ’s normal vector [J ].Computer Simula-tion ,2010,27(11):221-225.
[12]Zhang Z X ,Wu J ,Zhang J Q.Rapid texture mapping from image
sequences for building geometry model [J ].Geo -spatial Informa-tion Science ,2003,6(3):8-15.
[13]Rau J ,Teo T ,Chen L ,et al.Integration of GPS ,GIS and photo-grammetry for texture mapping in photo -realistic city modeling [C ]//2010Fourth Pacific -Rim Symposium on Image and Video Technology.Advances in Image and Video Technology ,Berlin :Springer ,2006:1283-1292.
A 3D visualization method for high -curvature linear entity
LIU Zhao 1,GAO Peichao 1,MIN Shiping 2,ZHAO Long 2,LUO Zhide 1
(1.Institute of Geospatial Information ,Tsinghua University ,Beijing 100084,China ;2.China Railway Eryuan Engineering Group Co.,Ltd.,Chengdu 610031,China )
Abstract :The linear model is among the vital models in 3D visual scene ,and its degree of fineness determines the visual effect of the scene.Common methods for constructing linear models can be divided into integral model method and spliced model method ;nevertheless ,for large -curvature linear models ,neither method is ideal.The vertex coordinates and texture mapping are difficult to control when the integral model method is employed ,and space between models and texture overlaps is inevitable when the other methods are used.A 3D visualization method for high -curvature linear entity is proposed in this paper.In the phase of geometric modeling ,the vertex coordinates ,normal vectors and index data are calculated for model lofting based on path and cross section.In the phase of texture mapping ,textures are made by creating a mapping between vertices on the model and pixels on the photo.The results show that the algorithm can be utilized to make large -curvature linear models like railway roadbed models ,and the algorithm has the merits of high accuracy ,requirement of less manual work and good visual effect.
Key words :3D -GIS ;linear model ;3D visualization ;high -curvature linear entity
第一作者简介:刘钊(1967-),男,副教授,主要研究方向为地理信息系统理论与应用、遥感数据处理与应用等。Email :liuz @tsinghua.edu.cn 。
(责任编辑:邢宇)
·
74·
大学物理仿真实验报告牛顿环法测曲率半径
大学物理仿真实验报告-牛顿环法测曲率半径
————————————————————————————————作者: ————————————————————————————————日期:
大学物理仿真实验报告 实验名称 牛顿环法测曲率半径 班级: 姓名: 学号: 日期:
牛顿环法测曲率半径 实验目的 1.学会用牛顿环测定透镜曲率半径。 2.正确使用读书显微镜,学习用逐差法处理数据。 实验原理 如下图所示,在平板玻璃面DCF上放一个曲率半径很大的平凸透镜ACB,C点为接触点,这样在ACB和DCF之间,形成一层厚度不均匀的空气薄膜,单色光从上方垂直入射到透镜上,透过透镜,近似垂直地入射于空气膜。分别从膜的上下表面反射的两条光线来自同一条入射光线,它们满足相干条件并在膜的上表面相遇而产生干涉,干涉后的强度由相遇的两条光线的光程差决定,由图可见,二者的光程差等于膜厚度e的两倍。此外,当光在空气膜的上表面反射时,是从光密媒质射向光疏媒质,反射光不发生相位突变,而在下表面反射时,则会发生相位突变,即在反射点处,反射光的相位与入射光的相位之间相差π,与之对应的光程差为λ/2 ,所以相干的两条光线还具有λ/2的附加光程差,总的光程差为 (1) 当?满足条件(2) 时,发生相长干涉,出现第K级亮纹,而当 (k = 0,1,2…) (3) 时,发生相消干涉,出现第k级暗纹。因为同一级条纹对应着相同的膜厚,所以干涉条纹是一组等厚度线。可以想见,干涉条纹是一组以C点为中心的同心圆,这就是所谓的牛顿环。 如图所示,设第k级条纹的半径为,对应的膜厚度为,则
(4) 在实验中,R的大小为几米到十几米,而的数量级为毫米,所以R>> ek,ek 2相对于2Re 是一个小量,可以忽略,所以上式可以简化为 k (5) 如果rk是第k级暗条纹的半径,由式(1)和(3)可得 (6) 代入式(5)得透镜曲率半径的计算公式 (7) 对给定的装置,R为常数,暗纹半径 (8) 和级数k的平方根成正比,即随着k的增大,条纹越来越细。 同理,如果r k是第k级明纹,则由式(1)和(2)得 (9) 代入式(5),可以算出 (10)
物理方法求曲率半径
用物理方法求常见曲线的曲率半径 王吉旭 滑县第一高级中学 456400 求曲线曲率的问题常出现在高中物理竞赛中,而近年来高考中也涉及到曲线曲率的问题,例如2008年江苏理综14题涉及到曲率半径,2011年高考安徽理综17题更是要求求出曲线曲率. 在数学中曲线的曲率半径可以用高等数学的方法求出,这里我们另辟蹊径,从物理的角度采用初等数学求出曲线曲率半径. 我们首先来看2011高考安徽理综17题: 一般的曲线运动可以分成很多小段,每小段都可以看成圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替. 如图(a )所示,曲线上A 点的曲率圆定义为:通过A 点和曲线上紧邻A 点两侧的两点作一圆,在极限情况下,这个圆就叫做A 点的曲率圆,其半径ρ叫做A 点的曲率半径. 现将一物体沿与水平面成α角的方向以速度v 0抛出,如图(b )所示。则在其轨迹最高点P 处得曲率半径是( ) A .g v 20 B .g v α220sin C .g v α220cos D .ααsin cos 220g v [解析] 物体在最高点P,只有水平速度为αcos 0v ,物体只受重力. 由r v m F 2 =向得: ρα20)cos (v m mg = 则有:g v αρ220cos = 本题正确答案为C 上述问题给我们启示: 从物理的角度,我们也可以求出曲线上某点的曲率半径. 事实上,物理学上我们常讨论的曲线有抛物线、椭圆、双曲线等,我们都可以利用上述的方法求曲率半径.下面我们来逐一研究. 一、求抛物线顶点的曲率半径 物体做平抛运动时其轨迹就是抛物线.假设物体平抛初速度为0v ,运动轨迹如图2所示. 则有将物体的运动分解为水平分运动和竖直分运动: 公式为:t v x 0= ① 22 1gt y = ② 联立①②式得220 2x v g y = 图1
CAD三维图的绘制入门教程
图2-1 CAD 三维建模教程 一、工字型的绘制 步骤一:设置好绘图单位、绘图范围、线型、图层、颜色,打开捕捉功能。从下拉菜单View →Display →UCSIcon →On 关闭坐标显示。步骤二:根据图1所示尺寸绘制图形,得到如图1-1所示封闭图形。 步骤三:创建面域。在命令栏Command :输入Region ,用框选方式全部选中该图形,回车。出现提示:1 loop extracted ,1 Region created ,表示形成了一个封闭图形,创建了一 个面域。步骤四:对该面域进行拉伸操作。Draw →Solids →Extrude ,选中该面域的边框,回车。在命令栏提示:Specify height of extrusion or [Path]:30,回车,再回车。三维工字形实体就生成了。步骤五:观察三维实体。View →3D Views →SW Isometric ,再从View →Hide 进行消除隐藏线处理,观察,最后进行着色渲染,View →Shade →Gouraud Shaded ,如图1-2所示。 二、二维五角形到三维五角星的绘制 步骤一:设置好绘图单位、绘图范围、线型、图层、颜色,打开捕捉功能。步骤二:绘制一 个矩形,以矩形中心为圆心,作一个圆及一个椭圆,修整直线。步骤三:阵列直线,创建光 线效果。将直线段在360度范围内阵列72个,形成光线效果步骤。 步骤四:修整直线。以椭圆为边界,将直线每隔一条修剪至椭圆;同时以矩形为边界,将矩形外的线条全部修剪至矩形;矩形内没修的剪线条延伸至矩形。步骤五:绘制五角形。在上图的旁边绘制一个圆,再绘制这个圆的内接正五边形。将五边形的五个端点连成直线,修剪掉每边的中间部分就得到五角形。步骤六:绘制五角星。先用交叉窗口选择的方法将五角形 图1-1 平面图 图1-2 三维效果图 图2-2
物理方法求曲率半径
用物理方法求常见曲线的曲率半径 求曲线曲率的问题常出现在高中物理竞赛中,而近年来高考中也涉及到曲线曲率的问题,例如江苏理综14题涉及到曲率半径,高考安徽理综17题更是要求求出曲线曲率. 在数学中曲线的曲率半径可以用高等数学的方法求出,这里我们另辟蹊径,从物理的角度采用初等数学求出曲线曲率半径. 我们首先来看高考安徽理综17题: 一般的曲线运动可以分成很多小段,每小段都可以看成圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替. 如图(a )所示,曲线上A 点的曲率圆定义为:通过A 点和曲线上紧邻A 点两侧的两点作一圆,在极限情况下,这个圆就叫做A 点的曲率圆,其半径ρ叫做A 点的曲率半径. 现将一物体沿与水平面成α角的方向以速度v 0抛出,如图(b )所示。则在其轨迹最高点P 处得曲率半径是( ) A .g v 20 B .g v α220sin C .g v α220cos D .α αsin cos 220g v [解析] 物体在最高点P,只有水平速度为αcos 0v ,物体只受重力. 由r v m F 2 =向得: ρα20)cos (v m mg = 则有:g v α ρ22 0cos = 本题正确答案为C 上述问题给我们启示: 从物理的角度,我们也可以求出曲线上某点的曲率半径. 事实上,物理学上我们常讨论的曲线有抛物线、椭圆、双曲线等,我们都可以利用上述的方法求曲率半径.下面我们来逐一研究. 一、求抛物线顶点的曲率半径 物体做平抛运动时其轨迹就是抛物线.假设物体平抛初速度为0v ,运动轨迹如图2所示. 则有将物体的运动分解为水平分运动和竖直分运动: 公式为:t v x 0= ① 2 2 1gt y = ② 联立①②式得2 2 2x v g y = 图1 x y O 图2 v 0
如何计算抛物线点处的曲率和曲率半径
用物理方法计算抛物线某点处的曲率和曲率半径 对于一般的弧来说,各点处曲率可能不同,但当弧上点A处的曲率不为零时,我们可以设想在弧的凹方一侧有一个圆周,它与弧在点A相切(即与弧有公切线),这样的圆就称为弧上A点处的曲率圆。 对于函数图形某点的曲率和曲率半径,在数学上我们需要用到求二阶导数的方法。 今天我想简单说一种有趣的方法,将该问题用物理的思维来解决,无需求导便能够知道抛物线某点处的曲率和曲率半径。这种方法不属于主流方法,因此不能用它代替常规方法。介绍此方法的目的,只是为了让大家对抛物线及抛体运动和圆周运动乃至整个曲线运动本质上的联系有更加深刻的认识。 举一个最简单的例子:y=-x2,我们作出它的图像 设图像上存在一点A(a,-a2),求该点的曲率和曲率半径。 我们假设一质点从顶点O开始做平抛运动,恰经过A(a,-a2)。 接下来,我们可以算出该点处质点的速度大小:先得到下落时间,接着算出水平速度和竖直速度分量,再合成。质点在该点处速度大小为v=√(g/2+2a2g)。 接下来,我们利用角度关系,将A处的加速度(即重力加速度g)沿速度方向和垂直于速度方向分解,如下图:
令A点处质点速度方向与水平方向的夹角为θ,可得垂直于速度方向的加速度分量为gcosθ。我们可以求出cosθ=v0/v=1/√(1+4a2),那么垂直于速度方向的加速度分量就等于g/√(1+4a2)。 我们想象一下在A点处有个圆与抛物线切于A,且该圆为抛物线A点处的曲率圆,半径为r。 根据圆周运动向心加速度计算式a=v2/r,得到gcosθ=g/√(1+4a2)=(g/2+2a2g)/r。 从而可以求出r=(1/2+2a2)√(1+4a2) 我们用微积分可求出该函数图象某点处曲率半径为:R=|{1+[y’(x)]2}3/2/y”|(x)。 在A点,导数为-2a,二阶导数为-2,所以上式就等于(1+4a2)3/2/2=(1/2+2a2)√(1+4a2)。 与上面算出的半径相等! 因而,曲率半径K=1/r=2/(1+4a2)3/2 抛体运动和圆周运动都是曲线运动,但在高中课本里它们是分开学习的,大家或许曲线运动学得都不错,但或许很少有人想过抛体运动和圆周运动的内在联系。 高中阶段数学还没有曲率半径的概念,写本文的目的并不在于提前灌输曲率知识,也并不代表这种求法能够替代微积分。表面上看,这是一种新的数学求法,但实质上是以数学的形式为物理服务,目的是让大家看到抛体运动和圆周运动这两种曲线运动并不是割裂开的,它们内部有着非常大的联系,甚至可以说本质是相同的,我们甚至可以将抛体运动视为由无数个圆周运动组合而成!
利用数学公式和物理模型求曲率半径
利用数学公式和物理模型求曲率半径 丁震(江苏省泰兴中学 江苏 225400) 摘要 本文首先推导高等数学中的曲率公式,使读者对曲率、曲率半径的知识有比较全面、清晰的理解,然后从平抛运动模型、简谐运动模型、天体运动模型和凹面镜模型推导圆锥曲线中顶点位置的曲率半径。 关键词 曲率 开普勒第二定律 笛卡尔规则 高中物理教学中处理一般曲线运动的力和运动问题,常建立圆周运动模型,圆为相切圆或辅助圆,相切圆的半径即为曲率半径。在自主招生和物理竞赛的命题中,关于曲率半径的知识也屡见不鲜。笔者重点利用几种常见的物理模型推导圆锥曲线中特殊位置的曲率半径,抛砖引玉,希望各位同仁批评指正。 一. 曲率公式 曲线运动的轨迹是曲线,在数学上,用曲率描述曲线(连续函数)弯曲程度。如图1所示xoy 坐标系中曲线上有两逼近的点M 和M ',设M M '的弧长为Δs ,M 和M '切线的倾斜角变化量为Δα,则 弧微分公式:s ?'=tan y α ; 平均曲率:=K s α?? ; M 点的曲率:0lim =s d K s ds αα?→?=?, 其中y '为一阶导数,y ''为二阶导数; M 点的曲率半径:1=K ρ ; 只要曲线方程给定,都能够利用公式求出曲线上各点的曲率半径。 二. 平抛运动模型 如图2所示小球m 以v 0平抛,不计阻力,则0=x v t ,21= 2 y gt ; 消去t 得:22 0=2v x y g ?? ; 在抛出点O :20=g=v a ρ, 得: 20=v g ρ ; 图1
抛物线的标准方程2 =2x Py ,其中20v P g = ; 故顶点O 处曲率半径=P ρ 。 三. 简谐运动模型 质点m 做椭圆运动,可视为两个互相垂直的同频率简谐运动的叠加,如图3所示xoy 坐标系中,椭圆方程22 22+=1x y a b ,半焦距c x 方向:=-x F kx ,振幅为a ; y 方向:=-y F ky ,振幅为b ,其中k 为回复力系数; 则在顶点A 处:2==A nA A v ka a m ρ ; 简谐运动的频率ω=A v b ω? 得:2=A b a ρ, 同理顶点B 处:2 B a b ρ= 。 四. 天体运动模型 如图4所示双曲线方程22 22-=1x y a b ,半焦距c =b y x a 。 质量为M 的太阳在焦点F (c,0)处。设行星在双曲线轨道顶点时的速率为v 0,质量为m 的行星绕太阳运动在顶点处的机械能为201-2-Mm E mv G c a = ,设行星远离太阳时的速率为v ∞, 根据开普勒第二定律: 0=(-)v b v c a ∞? 根据机械能守恒定律: 22011-=2-2 Mm mv G mv c a ∞, 可得:0v ; 在顶点处:202=(-)v Mm G m c a ρ,得2=b a ρ 。 五. 凹面镜模型 几何光学中凹面镜成像的物像关系在近轴光线条件下,利用笛卡尔规则表示为: 112+='s s r ,其中s ’为像距,s 为物距,r 为球面半径,顶点左侧为负,右侧为正。 分别利用物像关系推导圆锥曲线中顶点处的曲率半径。 图2 图3 图4
大学物理仿真实验报告-牛顿环法测曲率半径
大学物理仿真实验报告 实验名称 牛顿环法测曲率半径 班级: 姓名: 学号: 日期:
牛顿环法测曲率半径 实验目的 1.学会用牛顿环测定透镜曲率半径。 2.正确使用读书显微镜,学习用逐差法处理数据。 实验原理 如下图所示,在平板玻璃面DCF上放一个曲率半径很大的平凸透镜ACB,C点为接触点,这样在ACB和DCF之间,形成一层厚度不均匀的空气薄膜,单色光从上方垂直入射到透镜上,透过透镜,近似垂直地入射于空气膜。分别从膜的上下表面反射的两条光线来自同一条入射光线,它们满足相干条件并在膜的上表面相遇而产生干涉,干涉后的强度由相遇的两条光线的光程差决定,由图可见,二者的光程差等于膜厚度e的两倍。此外,当光在空气膜的上表面反射时,是从光密媒质射向光疏媒质,反射光不发生相位突变,而在下表面反射时,则会发生相位突变,即在反射点处,反射光的相位与入射光的相位之间相差π,与之对应的光程差为λ/2 ,所以相干的两条光线还具有λ/2的附加光程差,总的光程差为 (1) 当?满足条件(2) 时,发生相长干涉,出现第K级亮纹,而当 (k = 0,1,2…)(3) 时,发生相消干涉,出现第k级暗纹。因为同一级条纹对应着相同的膜厚,所以干涉条纹是一组等厚度线。可以想见,干涉条纹是一组以C点为中心的同心圆,这就是所谓的牛顿环。 如图所示,设第k级条纹的半径为,对应的膜厚度为,则 (4)
在实验中,R的大小为几米到十几米,而的数量级为毫米,所以R >> e k,e k2相对于2Re k是一个小量,可以忽略,所以上式可以简化为 (5) 如果r k是第k级暗条纹的半径,由式(1)和(3)可得 (6) 代入式(5)得透镜曲率半径的计算公式 (7) 对给定的装置,R为常数,暗纹半径 (8) 和级数k的平方根成正比,即随着k的增大,条纹越来越细。 同理,如果r k是第k级明纹,则由式(1)和(2)得 (9) 代入式(5),可以算出 (10)由式(8)和(10)可见,只要测出暗纹半径(或明纹半径),数出对应的级数k,即可算出R。 在实验中,暗纹位置更容易确定,所以我们选用式(8)来进行计算。
(完整版)高中物理竞赛_话题4:曲率半径问题
话题4:曲率半径问题 一、曲率半径的引入 在研究曲线运动的速度时,我们作一级近似,把曲线运动用一系列元直线运动来逼近。因为在0t ?→ 的极限情况下,元位移的大小和元弧的长度是一致的,故“以直代曲”,对于描述速度这个反映运动快慢和方向的量来说已经足够了。 对于曲线运动中的加速度问题,若用同样的近似,把曲线运动用一系列元直线运动来代替,就不合适了。因为直线运动不能反映速度方向变化的因素。亦即,它不能全面反映加速度的所有特征。如何解决呢?圆周运动可以反映运动方向的变化,因此我们可以把一般的曲线运动,看成是一系列不同半径的圆周运动,即可以把整条曲线,用一系列不同半径的小圆弧来代替。也就是说,我们在处理曲线运动的加速度时,必须“以圆代曲”,而不是“以直代曲”。可以通过曲线上一点A 与无限接近的另外两个相邻点作一圆,在极限情况下,这个圆就是A 点的曲率圆。 二、曲线上某点曲率半径的定义 在向心加速度公式2 n v a ρ = 中ρ为曲线上该点的曲率半径。 圆上某点的曲率半径与圆半径相等,在中学物理中研究圆周运动问题时利用了这一特性顺利地解决了动力学问题。我们应该注意到,这也造成了对ρ意义的模糊,从而给其它运动的研究,如椭圆运动、抛体运动、旋轮线运动中的动力学问题设置了障碍。 曲率半径是微积分概念,中学数学和中学物理都没有介绍。曲率k 是用来描述曲线弯曲程度的概念。曲率越大,圆弯曲得越厉害,曲率半径ρ越小,且1 k ρ=。这就是说,曲线上一点处的曲率半径与曲线在该点处的曲率互为倒数。 二、曲线上某点曲率半径的确定方法 1、 从向心加速度n a 的定义式2 n v a ρ = 出发。 将加速度沿着切向和法向进行分解,找到切向速度v 和法向加速度n a ,再利用2 n v a ρ =求出该点的曲率半径ρ。
CAD三维实体绘制详细教程+例题
CAD 绘制三维实体基础 AutoCAD 除具有强大的二维绘图功能外,还具备基本的三维造型能力。若物体并无复杂的外表曲面及多变的空间结构关系,则使用AutoCAD 可以很方便地建立物体的三维模型。本章我们将介绍AutoCAD 三维绘图的基本知识。 11.1 三维几何模型分类 在AutoCAD 中,用户可以创建3种类型的三维模型:线框模型、表面模型及实体模型。这3种模型在计算机上的显示方式是相同的,即以线架结构显示出来,但用户可用特定命令使表面模型及实体模型的真实性表现出来。 11.1.1线框模型(Wireframe Model) 线框模型是一种轮廓模型,它是用线(3D 空间的直线及曲线)表达三维立体,不包含面及体的信息。不能使该模型消隐或着色。又由于其不含有体的数据,用户也不能得到对象的质量、重心、体积、惯性矩等物理特性,不能进行布尔运算。图11-1显示了立体的线框模型,在消隐模式下也看到后面的线。但线框模型结构简单,易于绘制。 11.1.2 表面模型(Surface Model ) 表面模型是用物体的表面表示物体。表面模型具有面及三维立体边界信息。表面不透明,能遮挡光线,因而表面模型可以被渲染及消隐。对于计算机辅助加工,用户还可以根据零件的表面模型形成完整的加工信息。但是不能进行布尔运算。如图11-2所示是两个表面模型的消隐效果,前面的 1、三维模型的分类及三维坐标系; 2、三维图形的观察方法; 3、创建基本三维实体; 4、由二维对象生成三维实体; 5、编辑实体、实体的面和边; 1、建立用户坐标系; 2、编辑出版三维实体。 讲授8学时 上机8学时 总计16学时
【精品】CAD三维实体绘制详细教程+例题
CAD 绘制三维实体基础 1、三维模型的分类及三维坐标系; 2、三维图形的观察方法; 3、创建基本三维实体; 4、由二维对象生成三维实体; 5、编辑实体、实体的面和边; 1、建立用户坐标系; 2、编辑出版三维实体。 讲授8学时 上机8学时 总计16学时 AutoCAD除具有强大的二维绘图功能外,还具备基本的三维造型能力。若物体并无复杂的外 表曲面及多变的空间结构关系,则使用AutoCAD可以很方便地建立物体的三维模型。本章我们将 介绍AutoCAD三维绘图的基本知识。 11.1 三维几何模型分类 在AutoCAD中,用户可以创建3种类型的三维模型:线框模型、表面模型及实体模型。这3种模型在计算机上的显示方式是相同的,即以线架结构显示出来,但用户可用特定命令使表面模型 及实体模型的真实性表现出来。 11.1.1线框模型(Wireframe Model) 线框模型是一种轮廓模型,它是用线(3D空间的直线及曲线)表达三维立体,不包含面及体 的信息。不能使该模型消隐或着色。又由于其不含有体的数据,用户也不能得到对象的质量、重心、体积、惯性矩等物理特性,不能进行布尔运算。图11-1显示了立体的线框模型,在消隐模式下也看 到后面的线。但线框模型结构简单,易于绘制。 11.1.2 表面模型(Surface Model) 表面模型是用物体的表面表示物体。表面模型具有面及三维立体边界信息。表面不透明,能遮 挡光线,因而表面模型可以被渲染及消隐。对于计算机辅助加工,用户还可以根据零件的表面模型 形成完整的加工信息。但是不能进行布尔运算。如图11-2所示是两个表面模型的消隐效果,前面的
薄片圆筒遮住了后面长方体的一部分。 11.1.3 实体模型 实体模型具有线、表面、体的全部信息。对于此类模型,可以区分对象的内部及外部,可以对它进行打孔、切槽和添加材料等布尔运算,对实体装配进行干涉检查,分析模型的质量特性,如质心、体积和惯性矩。对于计算机辅助加工,用户还可利用实体模型的数据生成数控加工代码,进行数控刀具轨迹仿真加工等。如图 11-3所示是实体模型。 11.2 三维坐标系实例——三维坐标系、长方体、倒角、删除面 AutoCAD 的坐标系统是三维笛卡儿直角坐标系,分为世界坐标系(WCS )和用户坐标系(UCS )。 图11-4表示的是两种坐标系下的图标。图中“X ”或“Y ”的剪头方向表示当前坐标轴 X 轴或Y 轴 的正方向,Z 轴正方向用右手定则判定。 图11-1 线框模型 图11-2 表面模型 图11-3 实体模型
CAD三维操作教程
绘制三维图形 重点与难点:本节重点讲解了三维坐标表示及三维图形观察方法;使用直线、样条曲线、三维多段线和各种曲面绘制命令绘制三维图形;使用基本命令绘制三维实体以及通过对二维图形进行拉伸、旋转等操作创建各种各样的复杂实体。 在工程设计和绘图过程中,三维图形应用越来越广泛。AutoCAD可以利用3种方式来创建三维图形,即线架模型方式、曲面模型方式和实体模型方式。线架模型方式为一种轮廓模型,它由三维的直线和曲线组成,没有面和体的特征。表面模型用面描述三维对象,它不仅定义了三维对象的边界,而且还定义了表面即具有面的特征。实体模型不仅具有线和面的特征,而且还具有体的特征,各实体对象间可以进行各种布尔运算操作,从而创建复杂的三维实体图形。 如何将单个视口变成四个视口方法 视口工具栏中点击显示“视口”对话框,选四个相等视图,改为三维,在左上角为俯视图,右上角为主视图(前视图),左下角为左视图,右下角为--—等轴测。 观察三维图形
在AutoCAD中,使用“视图”菜单下的“缩放”、“视图”菜单下的“平移”子菜单中的命令可以缩放或平移三维图形,以观察图形的整体或局部。其方法与观察平面图形的方法相同。此外,在观测三维图形时,还可以通过旋转、消隐及着色等方法来观察三维图形。 ◆消隐图形 在绘制三维曲面及实体时,为了更好地观察效果,可选择“视图”菜单下的“消隐” 命令(HIDE),暂时隐藏位于实体背后而被遮挡的部分。 ◆着色图形 在AutoCAD中,使用“视图”菜单下的“着色”子菜单中的命令,可生成“二维线框”、“三维线框”、“消隐”、“平面渲染”、“体渲染”、“带边框平面渲染”和“带边框体渲染”多种视图。例如,选择“视图”----“着色”---“平面着色”命令,以图形的线框颜色着色图形。
关于不同类型缓和曲线的判断及起点、终点曲率半径的计算方法
目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。 第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈. 1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。 2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。 3.对称与不对称缓和曲线是相对于一个单交点内的两段缓和曲线(即常说的第一
关于不同类型缓和曲线 的判断及起点、终点曲率半径的计算方法
关于不同类型缓和曲线的判断及起点、终点曲率半径的计算方法 目前在匝道或线路施工坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,其实问题出于该缓和曲线是否是完整缓和曲线引起的。关于这点,相关的课本教材上没有明确的讲述,网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。第一:先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈. 1.当对于单独一段缓和曲线从其完整与否来讲是分为完整与不完整两类;当对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言)又有对称缓和曲线与不对称缓和曲线之分。由此看来,完整与对称与否是针对缓和曲线两个方面来看待区分的。 2.缓和曲线我们的测量教材上讲述的其实就是完整缓和曲线,也可以知道缓和曲线上:各个点的半径是不同的,起点到终点的半径值过度是从正无穷大到所接圆曲线半径之过度如从ZH向HY方向;或者是从所接圆曲线半径值向正无穷大过度的,如从YH向HZ方向。那么由此可以不难判断出来,完整缓和曲线就是符合上述特征的,那么不完整的缓和曲线就是不符合上述特征的,但是线路上的平曲线设计时候一般缓和曲线不单独存在的,整体上缓和曲线前或后一般都是要连接一个圆曲线的,那么不完整缓和曲线其实就是在完整缓和曲线上截取的一段,一般就是去掉了半径无穷大的那端而是从某个点开始的半径值向所接圆曲线半径值过度的。 3.对称与不对称缓和曲线是相对于一个单交点内的两段缓和曲线(即常说的第一缓和曲线和第二缓和曲线而言),当两个缓和曲线长度相等时候则称之为对称缓和曲线,自然此时的切线长、缓和曲线参数A值都是相等的,反之不相等就称为不对称缓和曲线,自然切线长、缓和曲线是不相等的。第二:由此可以看出对于缓和曲线而言,对称与否很容易分辨判断无需赘述,完整与否不易区分,也是这里重点要说的问题. 1.完整与不完整缓和曲线的区别判断方法:综上所述,完整缓和曲线与不完整缓和曲线的判断其实就在于验证完整缓和曲线参数方程A^2=R*Ls这个等式成立与否就可。(A为已知的缓和曲线参数,R为缓和曲线所接圆曲线的半径,Ls为该段缓和曲线的长度)理论上,当该式子成立时候,那就是完整缓和曲线无疑,当不成立时候那就可判断为不完整缓和曲线了。实际工作操作时候验证方法如下:先把R*Ls的乘积进行开平方然后看所得到的结果是否与所提供的缓和曲线参数A值相等。 2.完整缓和曲线与不完整缓和曲线起点终点的曲率半径的判断与计算:线路设计上的缓和曲线一般不会单独存在的,连续的缓和曲线起点或终点必定有一端都是要接圆曲线的,那么缓和曲线一端的半径值必定就是圆曲线的半径值了,求半径的问题就变成只需求出另外一端半径就可以了.上面说过首先判断出该缓和曲线是否是完整的办法,那么当是完整缓和曲线时候,起点或终点两端的半径,必定一端是无穷大,一端就是圆曲线半径了;那么当判断是不完整缓和曲线时,一端半径就是圆曲线半径,另一端的半径就绝对不能是无穷大了的,理论上应该是该端点的半径值要小于无穷大而大于所接圆曲线的半径值,那么该怎么求出来呢?此时就牵涉到了不完整缓和曲线的参数方程:A^2=[(R大*R小)÷(R大-R小)]*Ls 由上方程可以看出,R大就是我们所需要求的这端半径了,R小自然就是该不完整缓和曲线所接的圆曲线半径了。A为该不完整缓和曲线参数,R小为所接圆曲线半径,Ls为该不完整缓和曲线的长度,这些图纸都提供的有了,只需按照上面的不完整缓和曲线的参数方程进行解方程就可得到另一端的半径值了,也就是R大=(A^2*R小)÷(A^2-R小*Ls)就可以
大学物理仿真实验报告--牛顿环法测曲率半径
大学物理仿真实验报告 实验名称:牛顿环法测曲率半径 共 6 页 系别:实验日期 专业班级:组别____ 实验报告日期 姓名学号报告退发 ( 订正、重做 ) 教师审批签字 一实验目的 1.学会用牛顿环测定透镜曲率半径。 2.正确使用读书显微镜,学习用逐差法处理数据。 二实验仪器 牛顿环装置,读数显微镜,钠光灯。 三实验原理 如下图所示,在平板玻璃面DCF上放一个曲率半径很大的平凸透镜ACB,C点为接触点,这样在ACB和DCF之间,形成一层厚度不均匀的空气薄膜,单色光从上方垂直入射到透 镜上,透过透镜,近似垂直地入射于空气膜。分别从膜的 上下表面反射的两条光线来自同一条入射光线,它们满足 相干条件并在膜的上表面相遇而产生干涉,干涉后的强度 由相遇的两条光线的光程差决定,由图可见,二者的光程 差等于膜厚度e的两倍,即 此外,当光在空气膜的上表面反射时,是从光密媒质 射向光疏媒质,反射光不发生相位突变,而在下表面反射时,则会发生相位突变,即在反射点处,反射光的相位与入射光的相位之间相差π,与之对应的光程差为λ/2 ,所以相干的两条光线还具有λ/2的附加光程差,总的光程差为 (1) 当?满足条件(2) 时,发生相长干涉,出现第K级亮纹,而当
(k = 0,1,2…)(3) 时,发生相消干涉,出现第k级暗纹。因为同一级条纹对应着相同的膜厚,所以干涉条纹是一组等厚度线。可以想见,干涉条纹是一组以C点为中心的同心圆,这就是所谓的牛顿环。 如图所示,设第k级条纹的半径为,对应的膜厚度为,则 (4) 在实验中,R的大小为几米到十几米,而的数量级为毫米,所以R >> e k,e k2相对于2Re k是一个小量,可以忽略,所以上式可以简化为 (5) 如果r k是第k级暗条纹的半径,由式(1)和(3)可得 (6) 代入式(5)得透镜曲率半径的计算公式 (7) 对给定的装置,R为常数,暗纹半径 (8) 和级数k的平方根成正比,即随着k的增大,条纹越来越细。 同理,如果r k是第k级明纹,则由式(1)和(2)得 (9) 代入式(5),可以算出
三维实体建模技术
第一章三维实体建模技术 学习重点 了解三维实体建模设计的特点和一般过程; 熟释NX 3.0的各个功能面板,建模方式以及模型分析功能; 掌握NX 3.0 关于草图绘制,零件设计,装配设计,工程图设计的基本操作。 1.1概述 三维建模设计不同于二维绘图设计,二维绘图设计在一个平面上即可完成,而三维建模设计是在三维空间中进行,建立的模型具有长度,高度,宽度三个方向的尺寸。在三维建模设计中,首先建立在工作空间的坐标系(包括原点,坐标轴和基准平面),然后在草绘平面绘制模型的特征截面或扫描轨迹,并根据参照平面放置特征截面的各图形元素,对二维特征截面进行拉伸,旋转,扫描等操作,可生成三维模型的基础特征。特征是构成三维模型的基础,各中各样的三维模型就是由不同的特征按照一定的设计要求进行组合所形成的集合体。 NX 3.0 软件系统是美国UGS公司研制的一套由设计到制造的一体化三维软件,是新一代的产品造型系统。本章所有操作界面,设计流程以及模型均在NX 3.0环境中进行。 1.2实训1——机械零件实体模型建立 1.2.1问题描述 零件设计是机械设计的基础,通过对零件进行实体设计,可以使设计过程更加直观,并尽量多地获取零件的体信息。零件实体建模的基本技术是基于特征的,任何零件的建立都离不开特征的建立,而参数化绘制是创建各种零件特征的基础,贯穿整个零件建模过程。熟悉掌握特征截面的参数化草图绘制技术,进而由截面草图生成零件特征的操作技术,是进行 三维 设计 的基图1-1 轴、键和半联轴器的实体模型 本功。本章以机械设计中常用零件轴,键,半联轴器的设计为例,简要说明在NX 3.0环境中进行零件设计,装配体设计和工程图设计的建模过程。 1.2.2实训目的 熟悉NX 3.0的操作界面,了解个功能面板;了解用NX 3.0进行零件三维实体建模的设计过程,初步实验用NX 3.0进行计算机辅助机械设计的强大功能。
如何计算抛物线某点处的曲率和曲率半径
用物理方法计算抛物线某点处的曲率和曲率半径对于一般的弧来说,各点处曲率可能不同,但当弧上点A处的曲率不为零时,我们可以设想在弧的凹方一侧有一个圆周,它与弧在点A相切(即与弧有公切线),这样的圆就称为弧上A点处的曲率圆。 对于函数图形某点的曲率和曲率半径,在数学上我们需要用到求二阶导数的方法。 今天我想简单说一种有趣的方法,将该问题用物理的思维来解决,无需求导便能够知道抛物线某点处的曲率和曲率半径。这种方法不属于主流方法,因此不能用它代替常规方法。介绍此方法的目的,只是为了让大家对抛物线及抛体运动和圆周运动乃至整个曲线运动本质上的联系有更加深刻的认识。 举一个最简单的例子:y=-x2,我们作出它的图像 设图像上存在一点A(a,-a2),求该点的曲率和曲率半径。 我们假设一质点从顶点O开始做平抛运动,恰经过A(a,-a2)。 接下来,我们可以算出该点处质点的速度大小:先得到下落时间,接着算出水平速度和竖直速度分量,再合成。质点在该点处速度大小为v=√(g/2+2a2g)。 接下来,我们利用角度关系,将A处的加速度(即重力加速度g)沿速度方向和垂直于速度方向分解,如下图:
令A点处质点速度方向与水平方向的夹角为θ,可得垂直于速度方向的加速度分量为gcosθ。我们可以求出cosθ=v0/v=1/√(1+4a2),那么垂直于速度方向的加速度分量就等于g/√(1+4a2)。 我们想象一下在A点处有个圆与抛物线切于A,且该圆为抛物线A点处的曲率圆,半径为r。 根据圆周运动向心加速度计算式a=v2/r,得到gcosθ=g/√(1+4a2)=(g/2+2a2g)/r。 从而可以求出r=(1/2+2a2)√(1+4a2) 我们用微积分可求出该函数图象某点处曲率半径为:R=|{1+[y’(x)]2}3/2/y”|(x)。 在A点,导数为-2a,二阶导数为-2,所以上式就等于(1+4a2)3/2/2=(1/2+2a2)√(1+4a2)。 与上面算出的半径相等! 因而,曲率半径K=1/r=2/(1+4a2)3/2 抛体运动和圆周运动都是曲线运动,但在高中课本里它们是分开学习的,大家或许曲线运动学得都不错,但或许很少有人想过抛体运动和圆周运动的内在联系。 高中阶段数学还没有曲率半径的概念,写本文的目的并不在于提前灌输曲率知识,也并不代表这种求法能够替代微积分。表面上看,这是一种新的数学求法,但实质上是以数学的形式为物理服务,目的是让大家看到抛体运动和圆周运动这两种曲线运动并不是割裂开的,它们内部有着非常大的联系,甚至可以说本质是相同的,我们甚至可以将抛体运动视为由无数个圆周运动组合而成!
(完整版)2-5绘制三维实体的相关技术
2-5 绘制三维实体的相关技术单元三十九绘制三维实体的相关技术 39.1 教案头
39.2 教学实施 【步骤1】:作业讲评 教学内容 (1)用CAD图显示上次绘图命令主要内容,讲解提交成果中存在的共性问题。(2)表扬提交成果好的同学。 【步骤2】:复习引入 教学内容 (1)演示回顾。 ◇AutoCAD设计中心的应用演示回顾。 ◇工具选项板和剪切板的使用演示回顾。 ◇样图的创建步骤演示。 ◇查询常见数据演示。 ◇绘制“进水闸结构图”难点步骤演示。 (2)互动演示。 ◇挑选优秀学生演示水闸扭面段绘制演示。 ◇肯定演示学生的合理步骤,指出存在的问题。 ◇指出学生绘制进水闸的读图问题,演示进水闸三维模型。 (3)引出新课——以“进水闸”为例引入。 ◇前面我们学习了如何来绘制平面图形,如何来绘制三维图形呢?引出新课。【步骤3】基本体三维实体的绘制方法的讲授与练习
教学内容 (1)了解和创建三维建模工作界面。 ◇了解三维建模的工作界面,打开常用的绘制三维图形的工具条。 ◇学生完成对创建三维建模的工作界面的设置。 (2)用实体命令绘制基本体的三维实体。 ◇演示绘制长方体,学生完成对长方体三维图形的绘制。 ◇演示绘制圆柱体,学生完成对圆柱体三维图形的绘制。 (3)用拉伸方法绘制基本的三维实体。 ◇演示绘制底面为正平面的直柱实体的步骤。 ◇设置多视口,一般是主视、俯视、左视与西南等轴测四个视口。 ◇在主视方向,绘制直柱的底面实形,并创建为面域。 ◇执行实体中的拉伸命令,完成实体创建。 ◇根据操作步骤,在教师的指导下,学生完成对直柱实体模型创建。 (4)用扫掠的方法绘制特殊的三维实体。 ◇演示已经扫掠过的图形。 ◇操作步骤——以钢筋实例演示(特别指出路径和拉伸面要垂直),学生完成钢筋三维模型的扫掠。 ◇绘制钢筋圆断面。 ◇绘制扫掠路径。 ◇执行扫掠命令,完成钢筋模型的绘制。 (5)用放样的方法绘制特殊三维实体。 ◇演示已经放样过的扭曲面体三维模型。 ◇演示扭曲面体三维模型放样的操作步骤——学生完成扭曲面体三维模型的放样。 ◇执行放样命令,选择导线方式放样。 ◇完成扭曲面体绘制,显示实体效果。 (6)用旋转的方法绘制回转体的三维实体。 ◇演示已经旋转过的图形。 ◇说明实体的二维对象必须是闭合的,并且应是一个整体。如果用直线或圆弧命令绘制旋转用的二维对象,则需要先用编辑多段线命令将它们转换为单条
各种曲线类型的缓和曲线的判断及起点、终点曲率半径的计算方法
各种曲线类型的缓和曲线的判断及起点、终点曲率半径的计算方法 看到这个标题是有点绕口啊!总结任何曲线类型都是由自然段组合而成,所谓自然段统指直线、缓和曲线、圆曲线。圆曲线又分单圆曲线和复曲线。单圆曲线就是单一半径的曲线。具有两个半径或以上不同半径的曲线称复曲线。在此一般平曲线不在说了,第一缓和曲线、圆曲线、第二缓和曲线。目前在坐标计算中经常遇到缓和曲线,实际中相信有很多测友选择用积木法或叫线元法正反算程序进行线路坐标计算,这就牵涉到线元的起点终点曲率半径判断的问题,一般的直线元,圆曲线元的起点终点半径判断,比较容易,可能令大家感觉麻烦的就是缓和曲线起点终点半径判断问题,缓和曲线有时候判断算对了,有时候却坐标算不对,究其原因,问题就出于该缓和曲线是否是完整缓和曲线。目前公路线性有非对称线性的设计,特别是在互通立交匝道和山区高速公路线性设计中。非对称线性又分为完全非对称线性和非对称非完整线性两种。所谓“完全非对称曲线”的含义就是第一缓和曲线长和第二缓和曲线长不等,而第一缓和曲线和第二缓和曲线起点处的半径为无穷大。所谓“非完整”的含义就是第一缓和曲线和第二缓和曲线的半径不是无穷大,而是有半径的。关于这点,一般课本教材上没有明确的讲述,查找网上对此问题的解释也是散见于不同的论文著作中,对于测量新手来说,线元法程序是非常适用上手的,但却往往因为遇到不完整缓和曲线的起点或终点的半径判断计算不出来导致坐标计算错误,的确是件令人恼火的事情,在此我就把自己的判断经验做一论述,给用线元法程序的测友们一同分享,当然高手们请一笑而过,也可留下你的经验与大家一起分享交流学习。 先说说完整缓和曲线和不完整缓和曲线以及不对称缓和曲线与对称缓和曲线的概念问题,以免混为一谈.
C绘制三维实体教程例题
C绘制三维实体教程例题Newly compiled on November 23, 2020
CAD 绘制三维实体基础 AutoCAD 除具有强大的二维绘图功能外,还具备基本的三维造型能力。若物体并无复杂的外表曲面及多变的空间结构关系,则使用 AutoCAD 可以很方便地建立物体的三维模型。本章我们将介绍AutoCAD 三维绘图的基本知识。 三维几何模型分类 在AutoCAD 中,用户可以创建3种类型的三维模型:线框模型、表面模型及实体模型。这3种模型在计算机上的显示方式是相同的,即以线架结构显示出来,但用户可用特定命令使表面模型及实体模型的真实性表现出来。 线框模型是一种轮廓模型,它是用线(3D 空间的直线及曲线)表达三维立体,不包含面及体的信息。不能使该模型消隐或着色。又由于其不含有体的数据,用户也不能得到对象的质量、重心、体积、惯性矩等物理特性,不能进行布尔运算。图11-1显示了立体的线框模型,在消隐模式下也看到后面的线。但线框模型结构简单,易于绘制。 表面模型(Surface Model ) 表面模型是用物体的表面表示物体。表面模型具有面及三维立体边界信息。表面不透明,能遮挡光线,因而表面模型可以被渲染及消隐。对于计算机辅助加工,用户 1、三维模型的分类及三维坐标系; 2、三维图形的观察方法; 3、创建基本三维实体; 1、建立用户坐标系; 2、编辑出版三维实体。 讲授8学时 上机8学时 总计16学时
还可以根据零件的表面模型形成完整的加工信息。但是不能进行布尔运算。如图11-2所示是两个表面模型的消隐效果,前面的薄片圆筒遮住了后面长方体的一部分。 实体模型 实体模型具有线、表面、体的全部信息。对于此类模型,可以区分对象的内部及外部,可以对它进行打孔、切槽和添加材料等布尔运算,对实体装配进行干涉检查,分析模型的质量特性,如质心、体积和惯性矩。对于计算机辅助加工,用户还可利用实体模型的数据生成数控加工代码,进行数控刀具轨迹仿真加工等。如图11-3所示是实体模型。 11.2 三维坐标系实例——三维坐标系、长方体、倒角、删除面 AutoCAD 的坐标系统是三维笛卡儿直角坐标系,分为世界坐标系(WCS )和用户坐标系(UCS )。图11-4表示的是两种坐标系下的图标。 图中“X ”或“Y ”的剪头方向 表示当前坐标轴X 轴或Y 轴的正方向,Z 轴正方向用右手定则判定。 缺省状态时,AutoCAD 的坐标系是世界坐标系。世界坐标系是唯一的,固定不变的,对于二维绘图,在大多数情况下,世界坐标系就能满足作图需要,但若是创建三维模型,就不太方便了,因为用户常常要在不同平面或是沿某个方向绘制结构。如绘 图11-1 线框模型 图11-2 表面模型 图11-3 实体模型 图11-4 表示坐标系的图标 世界坐标