台达伺服调机步骤简易说明书
台达位置与扭矩模式伺服电机文档(一类特选)
台达ASD-B2伺服ECMA-C20401GS电机控制文档一.扭矩模式 1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电 压来实现电机扭矩大小的输出。 2.接线:将控制器控制的能输出可变电压的引脚直接连接到 CN1的18引脚,将控制器的GND与伺服器CN1的19脚连 接 3.参数设定: P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013 的预警状态。 P1-01:03,将电机设定为转矩模式 P1-02:01,速度限制,电机在没有负载的情况下会转很快 P1-07:500,设置电机加减速的时间,减少通电与断电的时 对于轴与外设的冲击 P1-09=设定电机最高转速 P2-12:00,将TCM0设定为0 P2-13:00,将TCM1设定为0 P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控 制。详情见数据手册144页6.4.1 P2-14:14,设定速度,当不设定此项时,电机只有力矩,没有 转速
P1-41:200,表示输入5V模拟电压,达到100%额定转矩 P2-10:01,启动电机 当此时电机不转时,重启伺服器即可。(建议重启) 要关闭电机则将P2-10设定为00,并保存,然后将开关关闭 并重启即可完成电机的关闭。 二.位置模式 1.说明:当前位置模式是通过外部控制器输出的PWM来控制 伺服电机的位置以及速度,其中PWM频率控制电机速度, PWM的个数与P1-44与P1-45的结合控制电机的具体位置。 使用的脉冲输入为开集极NPN设备输入,电源为内部24v 电源。 2.接线:
上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制板的GND的连接线,用于控制器与伺服器的共地作用。
台达伺服调机步骤简易说明书
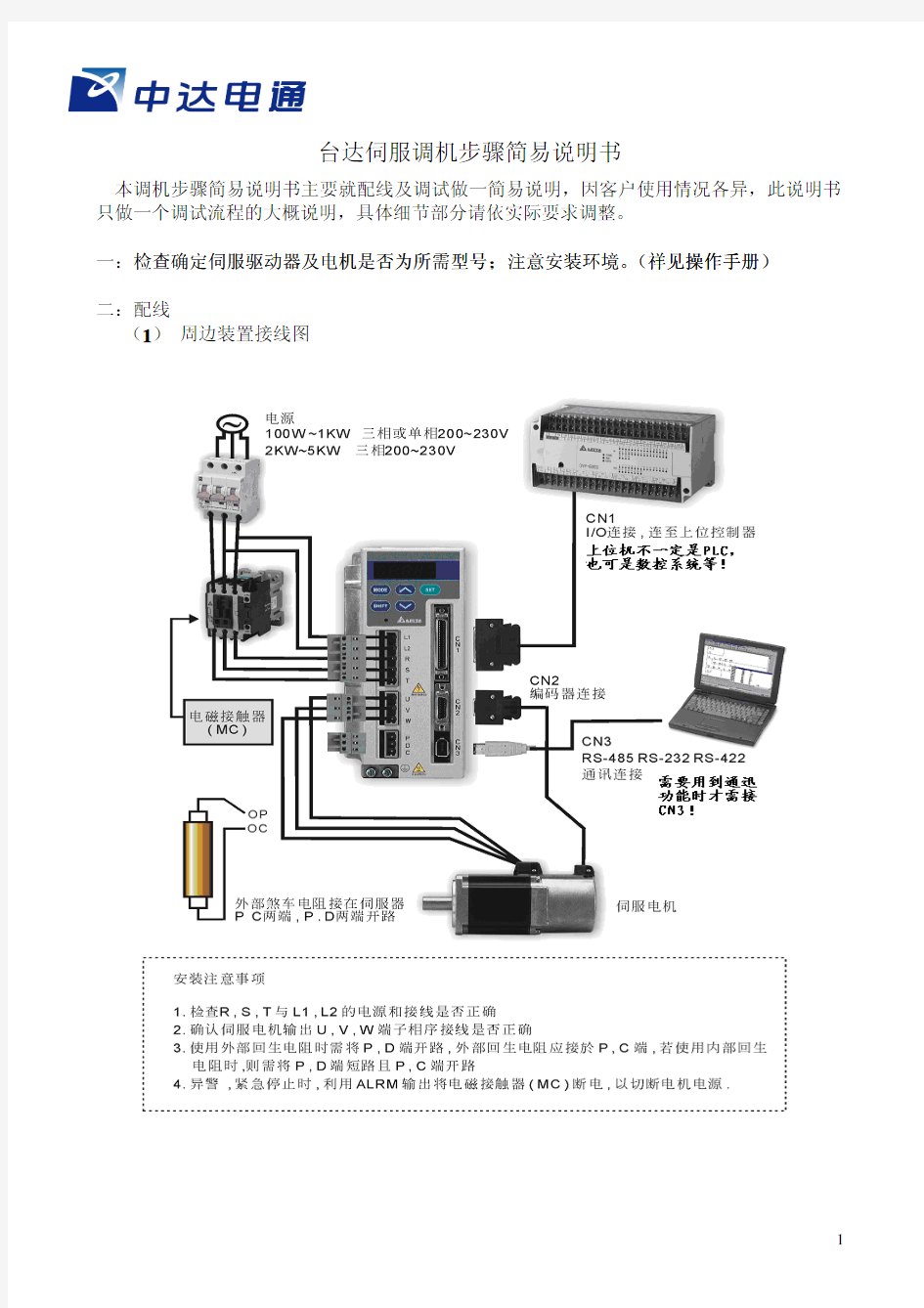
台达伺服调机步骤简易说明书 本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。 一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。(祥见操作手册) 二:配线 (1)周边装置接线图
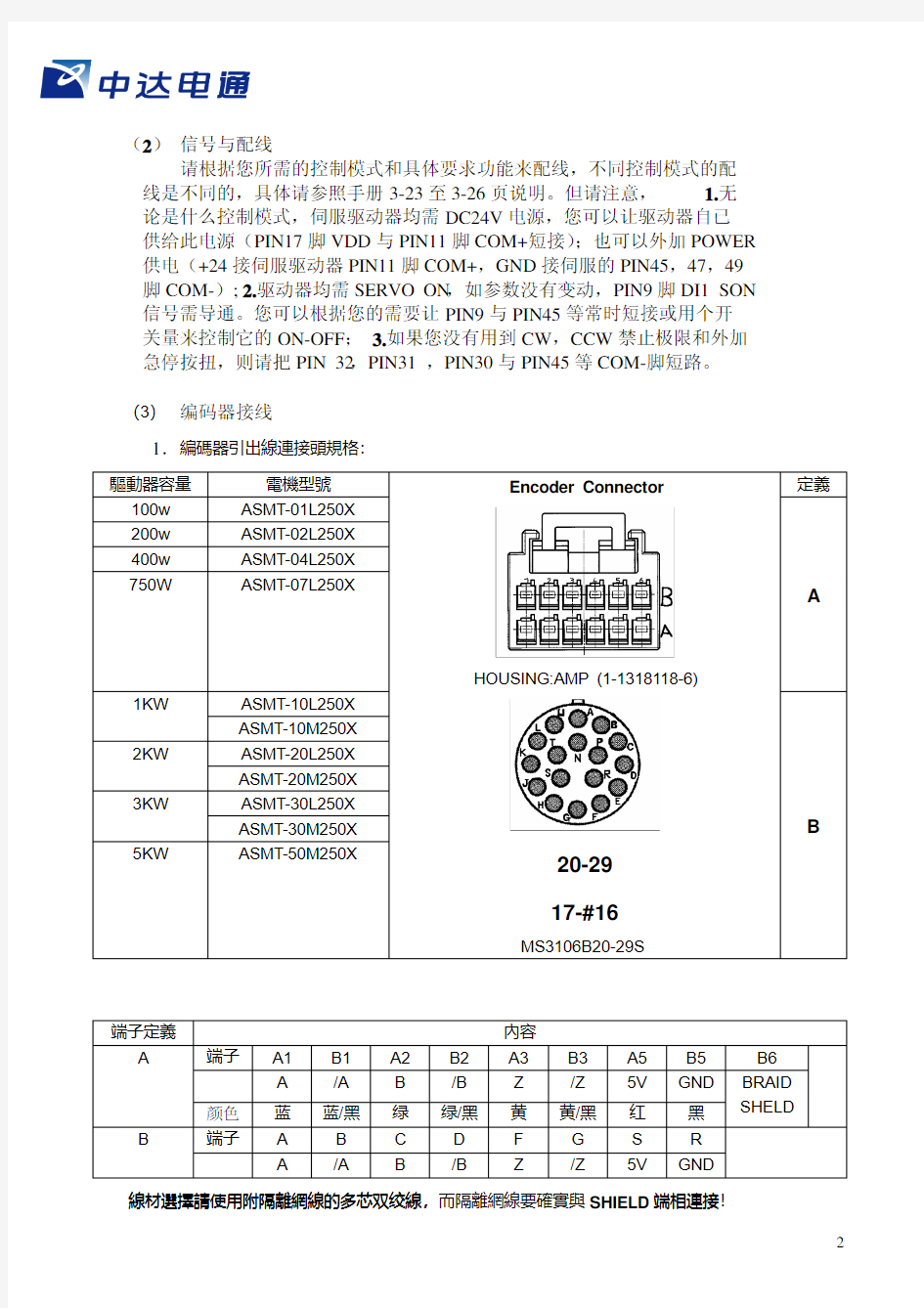
(2)信号与配线 请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。但请注意, 1.无论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON 信号需导通。您可以根据您的需要让PIN9与PIN45等常时短接或用个开关量来控制它的ON-OFF; 3.如果您没有用到CW,CCW禁止极限和外加急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。 (3)编码器接线 1.編碼器引出線連接頭規格: 線材選擇請使用附隔離網線的多芯双绞線,而隔離網線要確實與SHIELD端相連接!
2.CN2接头定义: CN2連接器(公)背面接線端 各信號的意義說明如下: 三:参数调整 A . 参数1-01:此参数为控制模式及控制指令输入源设定。请根据您所用的控制模式来 设定。如为位置模式,且指令由端子输入,则请设为00;如为速度模式,则请 设为02。具体设定请见下表: B . 参数1-00: 当您选用位置控制模式且由端子输入指令时(当参数1-01设为00时),此参数才需设 定,其功能为外部脉冲输入型式设定。 Z Y X X 值設定:脈沖型式 其中X=0:AB 相脈沖列(4x ); X=1:正轉脈沖列及逆轉脈沖列(CW CCW 型式)
台达位置与扭矩模式伺服电机文档
一.扭矩模式 1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电 压来实现电机扭矩大小的输出。 2.接线:将控制器控制的能输出可变电压的引脚直接连接到 CN1的18引脚,将控制器的GND与伺服器CN1的19脚连接 3.参数设定: P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013 的预警状态。 P1-01:03,将电机设定为转矩模式 P1-02:01,速度限制,电机在没有负载的情况下会转很快 P1-07:500,设置电机加减速的时间,减少通电与断电的时 对于轴与外设的冲击 P1-09=设定电机最高转速 P2-12:00,将TCM0设定为0 P2-13:00,将TCM1设定为0 P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控 制。详情见数据手册144页设定速度,当不设定此项时,电 机只有力矩,没有转速 P1-41:200,表示输入5V模拟电压,达到100%额定转矩 P2-10:01,启动电机 当此时电机不转时,重启伺服器即可。(建议重启) 要关闭电机则将P2-10设定为00,并保存,然后将开关关闭
并重启即可完成电机的关闭。 二.位置模式 1.说明:当前位置模式是通过外部控制器输出的PWM来控制伺 服电机的位置以及速度,其中PWM频率控制电机速度,PWM 的个数与P1-44与P1-45的结合控制电机的具体位置。使用 的脉冲输入为开集极NPN设备输入,电源为内部24v电源。 2.接线: 上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制 板的GND的连接线,用于控制器与伺服器的共地作用。 上图是伺服器CN1的接线,其中褐色线是CN1的41引脚, 其中的PWM信号是控制器的PWM输出的引脚串接一个电阻通 过一个NPN三极管之后连接到CN1的引脚。其中控制器的 pwm输出引脚连接NPN三极管的基极,三极管的发射极连接 CN1 的14脚(COM-),集电极连接到41引脚。35引脚与17 引脚需要短接,CN1的COM-也就是14引脚必须要与控制器 的GND连接,否则电机将不会转动。在位置模式下将伺服电 机的GND(19脚)与控制器的GND单独连接,电机将不会转 动。其他的线的连接方式见数据手册67页C3-1 3.设定: P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013 的预警状态。 P1-00:02,表示脉冲+方向控制方式
台达伺服电机常见问题
ASDA-A2的 PUU 單位的意義?如何使用? 所謂的PUU (Pulse of User Unit)使用者單位,為一個經過電子齒輪比的使用者單位,這樣的設計,可以讓使用者不必自行轉換外部實際物理Encoder 回授量與電子齒輪間的關係。例如:ASDA-A2的encoder ,每轉一圏,物理量將回授1280000個脈波,如果想要改變馬逹走一圏時的回授脈波數,例如100000個脈波當作一圏,則可以設P1-44(N) =128;P1-45(M) =10,當馬逹轉完一圏時,ASDA-A2會收到100000個脈波,這個經過電子齒輪比運算的100000,其單位即為PUU ,如果要在控制器內部下逹馬逹走兩圏的命令時,只需根據所定義的PUU 下200000個PUU 命令,控制器內部會自動換回其實際的物理量,這個用法很直覺,下圖為其運算原理。 一般一直認為同樣的負載、同樣的慣量(切刀伺服),使用同等轉速的2kW 馬達,慣量比大的馬達應該只有好處沒有壞處,但事實上在實驗過程中發現:切刀驅動不換,原來使用130框號, 2kW 的馬達,負載率約120 ~ 140%,負載慣量比1%的馬達總是過熱,因此當嘗試將馬達更換為180框號, 2kW ,結果換上去後發現速度只要開到800r/min ,就會發生ALE02(過電壓)或ALE05(回生異常)警示。兩台馬達的扭力是一樣的,但是原來使用130框號, 2kW 的馬達,當轉速達到1200r/min 才會達到極限。 從這個例子來看,並不是馬達慣量越大越好,那麼請問在那些應用場合下慣量比發揮的作用影響大,那些應用場合下扭力的影響大? 1. 並不是高慣量就一定好,低慣量就一定差,要看其應用場合。 T= I x α (扭力 = 慣量 x 角加速度) P= T x ω (功率 = 扭力 x 角速度) P = I x α x ω 所以,同樣的功率之下,若慣量提升,加速度必下降,即加減速的特性變差了,當然,角速度也會相對變化,在此我們先假設其運轉速度不變。 I 是固定的,當一個系統設定好後 (如飛刀系統,因為飛刀不變,但如果用於輸送帶,慣量則會變,當輸送帶上的物品變多時,
台达伺服调试经验故障排除
Q1:伺服电机与普通电机有何区别? A1:伺服电机与普通电机最大的区别在于电机转子和反馈装置。伺服电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。 Q2:伺服驱动器输入电源是否可接单相220V ? A2:台达伺服1.5KW(含)以下可接单相/三相220V电源,2.0KW(含)以上只能接三相220V电源。三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。 Q3:伺服驱动器输出到电机的UVW三相是否可以互换? A3:不可以,伺服驱动器到电机UVW的接法是唯一的。普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。伺服驱动器会检测并防止飞车,因此在UVW
接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。 Q4:伺服电机为何要Servo on之后才可以动作? A4:伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。
台达伺服电机A2系列常用型号
台达ASD-A2系列常用型号 系列功率型号详情 ASDA-A2 100W ASD-A2-0121-L A2 100W基础型全闭环 ASDA-A2 100W ECMA-C10401GS 带油封带键槽 ASDA-A2 100W ECMA-C10401HS 键槽油封刹车 ASDA-A2 200W ASD-A2-0221-L A2 200W基础型全闭环 ASDA-A2 200W ECMA-C10602RS 带键槽带中心螺纹孔油封 ASDA-A2 200W ECMA-C10602SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ASD-A2-0421-L A2 400W基础型全闭环 ASDA-A2 400W ECMA-C10604RS 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-C10604SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-E11305RS A2 500W 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-E11305SS A2 500W 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-G11303RS A2 300W 带键槽带中心螺纹孔油封 ASDA-A2 400W ECMA-G11303SS A2 300W 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-C10804R7 A2 400W 带键槽带中心螺纹孔油封80框 ASDA-A2 400W ECMA-C10804S7 A2 400W 带键槽带中心螺纹孔油封刹车80框ASDA-A2 750W ASD-A2-0721-L A2 750W基础型全闭环 ASDA-A2 750W ECMA-C10807RS 带键槽带中心螺纹孔油封 ASDA-A2 750W ECMA-C10807SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 750W ECMA-G11306RS 带键槽带中心螺纹孔油封 ASDA-A2 750W ECMA-G11306SS 带键槽带中心螺纹孔油封刹车 ASDA-A2 1KW ASD-A2-1021-L A2 1KW基础型全闭环 ASDA-A2 1KW ECMA-C10910RS 低惯量,1KW,键槽,86框号,油封 ASDA-A2 1KW ECMA-C11010RS 1KW 带键槽带中心螺纹孔油封轻惯量 ASDA-A2 1KW ECMA-C11010SS 1KW 带键槽带中心螺纹孔油封刹车轻惯量 ASDA-A2 1KW ECMA-E11310RS 1KW 带键槽带中心螺纹孔油封 ASDA-A2 1KW ECMA-E11310SS 1KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 1KW ECMA-G11309RS A2 900W 带键槽带中心螺纹孔油封 ASDA-A2 1KW ECMA-G11309SS A2 900W 带键槽带中心螺纹孔油封刹车 需要采购变频器PLC伺服电机人机界面就联系常州耀德机电,我们将为您提供最优质的产品和周到快捷的服务,如需要安装调试电话联系0519-********,我们期待与您合作!ASDA-A2 1.5KW ASD-A2-1521-L A2 1.5KW基础型全闭环 ASDA-A2 1.5KW ECMA-E11315RS A2 1.5KW 带键槽带中心螺纹孔油封 ASDA-A2 1.5KW ECMA-E11315SS A2 1.5KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 2KW ASD-A2-2023-L A2 2KW基础型全闭环 ASDA-A2 2KW ECMA-C11020RS A2 2KW 带键槽带中心螺纹孔油封轻惯量 ASDA-A2 2KW ECMA-C11020SS A2 2KW 带键槽带中心螺纹孔油封刹车轻惯量 ASDA-A2 2KW ECMA-E11320RS A2 2KW 带键槽带中心螺纹孔油封 ASDA-A2 2KW ECMA-E11320SS A2 2KW 带键槽带中心螺纹孔油封刹车 ASDA-A2 2KW ECMA-E11820RS A2 2KW 带键槽带中心螺纹孔油封180框 ASDA-A2 2KW ECMA-E11820SS A2 2KW 带键槽带中心螺纹孔油封刹车180框 ASDA-A2 3KW ASD-A2-3023-L A2 3KW基础型全闭环 ASDA-A2 3KW ECMA-E11830RS A2 3KW 带键槽带中心螺纹孔油封
台达DVP-ES2C系列与ASDA-A2伺服电机调试方法
台达绝对型编码器伺服系统的参数设置 (DVP32ES200RC/TC与ASDA-A2 伺服驱动器)使用之前需要对CANopen型号的PLC进行韧体的更新。(对应的版本为V3.43) 刻录方式: 1.PC 要与 ES2-C PLC 通过 IFD6601 链接。 2.点开有.exe 的文件,选择正确的 COM口。 3.鼠标点击 START burn 开始刻录,待PLC上面的EPROM指示灯闪烁红色以后,重新启动PLC, 4.重启后,再次鼠标点击 START burn 开始刻录可以看到白色进度条在移动(红色进度条也是一样的,白色代表版本升级,红色代表版本降级),同时看到 Progress 有显示百分数值,到达百分之百为刻录完成。 5.刻录后检查版本刻录情况 一,硬件 DI 信号配置 : DI1 → PL : 正向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱动(P2-10),用常闭接近开关,设置为23. 器显示异警。 DI2 → NL : 逆向运转禁止极限,为 B 接点,必须时常导通(ON),否则驱(P2-11),用常闭接近开关,设置为22. 动器显示异警。
DI3 → EMGS : 为 B 接点,必须时常导通(ON),否则驱动器显示异警。(P2-12),用常闭接近开关,设置为21. DI4 → ORGP : 在内部位置缓存器模式下,在搜寻原点时,此讯号接通后伺服将此点之位置当成原点。(可以不接) 二,手动设定参数 : 在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 : 1.将伺服 P2-08 设置为 10,回归原厂设定。 2.将伺服断电后重新上电。 3.设定伺服控制模式,将 P1-01 设置为 0001(PR 模式)具体方向可以根据实际情况更改。 4.P3-01通讯速度设置为 0403(1M)。 5.站号设定 : 依照需要的台数,分别设置每台伺服的 P3-00,请依序设定为 1、2、3 …最多可设定 8 台。 6.将伺服断电后重新上电。 1.设置伺服驱动器站号(P3-00),伺服从1到8依次设定。 2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403) 3.设置伺服电机的运动模式(P1-01如设置为0001就是PR位置控制模式)第三位数值可以设置电机运行方向。 4.设置伺服电机的正反向禁止极限,和急停触发。(P2-10-P2-18)
台达伺服调试经验故障排除
Q1 :伺服电机与普通电机有何区别? A1 :伺服电机与普通电机最大的区别在于电机转子和反馈装置。伺服 电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。 Q2 :伺服驱动器输入电源是否可接单相220V ? A2 :台达伺服1.5KW (含)以下可接单相/三相220V电源,2.0KW (含)以上只能接三相220V 电源。三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。 Q3 :伺服驱动器输出到电机的UVW三相是否可以互换? A3 :不可以,伺服驱动器到电机UVW的接法是唯一的。普通异步电机输入电源UVW 两相互换时电机会反转,事实上伺服电机UVW 任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。伺服驱动器会检测并防止飞车,因此在UVW
接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警 过负载ALE06 Q4 :伺服电机为何要Servo on 之后才可以动作? A4 :伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处 于放松的状态(手可以转动电机轴)。伺服驱动器接收到 Servo on 信 号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可 以接收指令去动作,没有收到指令时是不会动作的即使有外力介入 (手 转不动电机轴),这样伺服电机才能实现精确定位。 Q5 :伺服驱动器上电就报警 ALE14 如何处理? W 丿 證擦 110V 22OV
台达伺服调试
何謂伺服的低頻擺振?當發生低頻擺振時如何處理? 若系統剛性不足,在定位命令結束後,即使馬達本身已經接近靜止,機械傳動端仍會出現持續擺動。低頻抑振功能可以用來減緩機械傳動端擺動的現象。低頻抑振的範圍為 1.0 ~ 100.0Hz。本功能提供手動設定與自動設定,但目前只有ASDA-A2系列機種支援此功能。 低頻抑振方式分為自動及手動方式: (1) 自動設定 若使用者難以直接知道頻率的發生點,可以開啟自動低頻抑振功能。此功能會自動尋找低頻擺動的頻率。若P1-29設定為1時,系統會先自動關閉低頻抑振濾波功能,並開始自動尋找低頻的擺動頻率。當自動偵測到的頻率維持固定後,P1-29會自動設回0,並會將第一擺動頻率設定在P1-25且P1-26設為1。第二擺動頻率設定在P1-27且將P1-28設為1。當P1-29自動設回零後,低頻擺動依然存在,請檢查低頻抑振P1-26或P1-28是否已被自動開啟。若P1-26與P1-28皆為零,代表沒有偵測到任何頻率,此時請減少低頻擺動檢測準位P1-30,並設定P1-29 = 1,重新尋找低頻的擺動頻率。 (2) 手動設定 低頻抑振有兩組低頻抑振濾波器,第一組為參數P1-25 ~ P1-26,第二組為參數P1-27 ~ P1-28。可以利用這兩組濾波器來減緩兩個不同頻率的低頻擺動。參數P1-25與P1-27用來設定低頻擺動所發生的頻率,低頻抑振功能唯有在低頻抑振頻率參數設定與真實的擺動頻率接近時,才會抑制低頻的機械傳動端的擺動。參數P1-26與P1-28用來設定經濾波處理後的響應,當P1-26與P1-28設定越大響應越好,但設太大容易使得馬達行走不順。參數P1-26與P1-28出廠值預設值為零,代表兩組濾波器的功能皆被關閉。 伺服煞車電阻使用時機為何? 當伺服驅動器搭配馬達運轉時,若驅動器面板出現ALE05(回生能量異常)時,代表馬達回生產生的能量超過驅動器內建回生電阻所能消耗的能量,此時必須安裝回生電阻,提高驅動器回生能量消耗速度。 ASDA-A2系列內建回生電阻規格:
伺服电机接线方式
. 富士伺服电机 富士伺服电机电子齿轮比计算:命令 脉冲补偿周时的机械系统移动伺服电机旋转×位 β脉冲/转命令脉冲补偿131072 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N = ×131072 β(分子) 2500 α(分母) 131072 32768 = = 2500 625 β(分子) I/O信号接线 P24 1 24V 24V 19 电源 激磁 2 cont1 脉冲8 *CA 方向21 *CB 0V M24 14 报警17 OUT1 到位结束16 编码器接线方式(smart系统、w系列、A5) 驱动器电机端 P5 P5 1 7 M5 2 M5 8 SIG+ 5 5 SIG+ SIG- 4 SIG- 6 BAT+ BAT+ 1 3 BAT- 2 BAT- 4
地线 GND 外壳 3 旧版富士驱动器参数设置新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) '. . 松下伺服电机 松下A5 I/O接线说明: 1、2、7 24V 36、41 0V 4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 14 25 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0.** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数
台达A系列伺服电机调试步骤
台达A系列伺服电机调试 步骤 The Standardization Office was revised on the afternoon of December 13, 2020
第七轴通过伺服电机运行的调试步骤 一、概述 此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。 二、需准备的材料 1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC) 2、台达伺服电机ECMA-L110 20RS一台 3、台达伺服控制器ASD-A2-2023-M一台 4、威纶通触摸屏MT-8012IE一台 5、博途V15设计软件 6、威纶通设计软件 三、调试步骤及简单说明 调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置 1)、伺服驱动器面板介绍 2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。 画面一:将参数P2-15、P2-16、P2-17三个参数设定为0
画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为23
3)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作 步骤如下图
台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..
台达伺服电机说明书蜗轮蜗杆减速机电机减速一体机,NMRV40-20-Y..欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接. KB系列枫信伺服行星减速机: 分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。产品型号例如:KB142-32-S2-P2。 应用领域: 伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。 KB枫信系列精密行星减速机性能参数:
KB系列精密行星减速机转动惯量:
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417 配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435
台达伺服 调试经验 故障排除
扭矩 中国电信综合业务接入网(IP RAN)业务承载与维护指引 2. 路由设计 1 IGP 路由设计为保证路由层面的安全性,综合业务接入子网与城域骨干网采用不同的IGP 路由进程,并启用 MPLS,B 类设备同时属于多个 IGP 域,骨干与接入的 IGP 路由相对隔离,不进行路由的相互注入, B 设备同属于综合接入子网 MPLS 域和城域网骨干 MPLS 域。综合业务接入网 IGP 推荐采用 OSPF 协议,如果城域骨干网也使用 OSPF 进程,需与综合业务接入子网使用不同的 OSPF 进程,同时业务 转发与网管也需要设置不同的 OSPF 进程。对于业务转发 OSPF 进程,以接入环 为单位设置 Area 为 Stub Area,产生缺省路由;对于有部署 RSVP FRR 或 RSVP TE 的场景,允许在 B-B 之间为每个接入环增加子接口互联,实现 Stub Area 闭环。对网管 OSPF 进程,以接入环为单位设置 Area 为普通 Area,普通 Area 为开环,Area 编号建议采用业务 OSPF 一致的编号。图 5-2 2 BGP 路由设计综合业务接入子网 IGP 示意图 B 设备启用 MP-BGP,与城域网的 SR 在同一个 MP-BGP 域内,比照 PE 进行部署,提供 L3 VPN 业务的接入。 … 对于 CTVPN193,由 B 设备按需把网管 OSPF 进程产生的网管互联 11 / 中国电信综合业务接入网(IP RAN)业务承载与维护指引速收敛。。 ? 方 式 2:使用 RSVP TE+BFD 进行 LSP 层面的故障检测和路由快速收敛。 CSPF 选路采用松散模式,通过部署 BFD 进行故障检测触发 LSP 切换。 ? 方式 3:使用RSVP TE+FRR 进行 LSP 层面的故障检测和路由快速收敛。启用 RSVP+TE FRR ByPass 保护模式, CSPF 选路选用松散模式,采用最短路径作为主路径,次优路 径作为备份路径。 … 部署建议:推荐使用 PW 级的快速收敛,在这种情况下,LSP 级的快速收敛不做要求,可考虑使用 LDP 进行 LSP 层面的路由切换。在设备不支持 PW+BFD 的情况下,可选择 LSP 级快速收敛的方式三。 2 B-B/B-SR 间故障检测和路由快速收敛参照城域网组网规范,通过以下方式实现路由的快速收敛和业务保护: … 在 LSP 层面,采用 BFD for IGP/LDP 实现域内亚秒级收敛;可选择部署 FRR 实现关键链路保护,实现骨干 MPLS 区域 50ms 故障快速倒换。 …
伺服电机接线方式
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 SIG+ 5 5 SIG+ SIG- 6 4 SIG- BAT+ 3 1 BAT+ BAT- 4 2 BAT- GND 外壳 3 地线 旧版富士驱动器参数设置 新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式) 3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) × = = =
松下伺服电机松下A5 I/O接线说明: 1、2、7 24V 36、41 0V 4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 1 4 2 5 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0.** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数
三菱伺服电机台达伺服电机松下伺服电机
双曲面减速机特点:采用准双曲面齿轮传动,传动比大;输出扭矩大,传动效率高,节能环保;优质铝合金铸造,重量轻,不生锈;传动平稳,噪音小,适合再恶劣环境中长期连续工作;美观耐用,体积小;
可适应全方位安装,应用广泛,使用方便;TKM系列减速器安装尺寸与TNRV系列蜗轮蜗杆减速器完全兼容(TKM28与TNRV050部分尺寸不同);TKB系列双曲面减速机安装尺寸与W系列蜗轮蜗杆减速器完全兼容;模块化组合,可多种形式组合,满足各种传动条件的需求。
双曲面减速机主要材料:外壳:铝合金(机座:28-58);齿轮:20CrMnTiH1,渗碳淬火,齿面硬度56-62HRC,精磨后保持渗碳层厚度0.3-0.5mm。 KRV系列斜齿-准双曲面齿轮减速机 一、产品特点 1、采用准双曲面齿轮传动,传动比大。 2、输出扭矩大,传动效率高,节能环保。 3、优质铝合金铸造,重量轻,不生锈。 4、传动平稳,噪音小,适合在恶劣环境中长期连续工作。 5、美观耐用,体积小。
6、可适应全方位安装,应用广泛,使用方便。 7、KRV系列减速器安装尺寸与RV系列蜗轮蜗杆减速器完全兼容(KRV50与RV050部分尺寸不同) 8、模块化组合,可多种形式组合,满足各种传动条件的需求。 二、主要材料 1、外壳:铝合金(机座:50-90) 2、齿轮:20CrMnTi,渗碳淬火,齿面硬度56-62HRC,精磨后保持渗碳层厚度0.3mm-0.5mm 三、表面涂装 铝合金外壳: 1、先抛丸处理,再经特种防腐处理,保持银白金属感,并耐汽油,二甲苯等有机溶剂的腐蚀 2、磷化处理后,再喷RAL9022银灰涂料。 KRV系列斜齿-准双曲面齿轮减速马达 1.采用准双曲面齿轮传动,减速比大(1:7.5~1/300); 2.输出扭矩大,传动效率高(2级传动效率为92%,3级传动效率为90%);
台达A2系列伺服电机调试步骤(2019.7.12)
第七轴通过伺服电机运行的调试步骤 一、概述 此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。 二、需准备的材料 1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC) 2、台达伺服电机ECMA-L110 20RS一台 3、台达伺服控制器ASD-A2-2023-M一台 4、威纶通触摸屏MT-8012IE一台 5、博途V15设计软件 6、威纶通EBproV6.0设计软件 三、调试步骤及简单说明 调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置 1)、伺服驱动器面板介绍 2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。 画面一:将参数P2-15、P2-16、P2-17三个参数设定为0
画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为23
3)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图 4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。 ①、P1-01设定成Pt模式 00000
1kw-4KW松下台达 安川 三菱伺服电机专用减速机WPL160行星减速器
KFR系列直角伺服行星减速机: 具有高精度、高钢性、高负载、高效率、高速比、高寿命、低惯性、低振动、低噪音、低温升、外观美、结构轻小、安装方便、精确定位等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接. 应用领域: 伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。如:印刷机床、火焰切割、激光切割、数控机床、工具机械,食品包裝、自动化产业、工业机器人、和自动化的机电产品行业。 性能和特点: KFR系列直角伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。使用免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。 KFR系列伺服减速机性能参数:
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 200 246 287 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 200 246 287 4200W 215 4-M12 38/42(F7) 115 180(H7) 10 190 200 246 287 配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 214 262 300 4200W 215 4-M12 38/42F7 115 180H7 10 192 214 262 300 7500W 235 4-M12 55F7 120 200H7 10 220 214 262 300
台达B2伺服驱动器
台达B2伺服驱动器 台达伺服驱动器恢复出厂设置: A、通电后,P2-08设置为10,断电重启(如遇到无法设置成功请断开使能)。 B、这时出现AL-13,伺服报警(报警内容参照用户手册报警对照表) C、把P2-15设置为0。P2-16设置为0。P2-17设置为0. D、重新启动后报警消失 注意:进行模式选择后需要重新上电才能生效。 L1C,L2C控制电源接AC220V 。R-S主回路电源接AC220V 注意:通电时尽量使控制电源先得电,主回路电源后得电。至少同时得电,不能主回路电源先得电。 U-V-W接电机U接电机的红V接电机的白W接电机的黑绿接驱动器接地处 短接P-D。 一、位置模式: 例:螺杆螺距为5MM,要使每个脉冲当量为1微米。要求按下启动按钮滑台前进2mm,3s 后后退5mm,再7s后前进3mm,4s后如此循环。按下停止按钮停止。 A:电子齿轮比分子B:电子齿轮比分母 脉冲数x A/B=编码器分辨率(当电子齿轮比为1时,编码器反馈回的脉冲个数,编码器的分辨率为16000) 5mm=5000微米5000 x 160/5=160000(由于电子齿轮比分子设置为16时伺服转动过慢,因此放大10倍,设置为160。) 所以滑台要移动2MM那么上位机发送2000个脉冲。 参数设置: P1-00,设置为2,。脉冲+方向 P1-01,设置为0 P1-44 设置160 电子齿轮比,分子 P1-45 设置为5 电子齿轮比,分母(需要修改分母时必须断开使能) 接线: CN1共有44个接头,其中17,11,35短接 37接PLC的Y3 41接PLC的Y0 14为公共端COM,接PLC输出公共端 9为使能端,短接14 CN2接编码器 接线端子号及端子功能如下两张图:
20160310_台达伺服位置控制的应用和调试
台达伺服位置控制的应用和调试 1 PLC和伺服驱动器的接线方式 天银一般只用位置(PT)模式标准接线(脉冲与方向的),只用9,14,35,37和41四个端子,其中: 9号端子,伺服启动; 14号端子,COM-; 35号端子,指令脉冲的外部电源,COM+;(台达脉冲命令输入使用内部电源) 37号端子,伺服方向; 41号端子,伺服脉冲,外部输入脉冲的频率确定转动速度的大小,脉冲的个数来确定转动的角度。
2 伺服参数调试 2.1 脉冲个数确定 le 如果我们拿到一台伺服驱动器,不知道参数是否正确,需要把P2-8 设为10 即为恢复出厂设置。复位完成后既要开始设置参数,最先要搞 清楚电机转一圈需要多少脉冲,计算公式如下: 分辨率 / 1圈脉冲数 = P1-44/P1-45 式中:P1-44,电子齿轮比分子 P1-45,电子齿轮比分母(一般不动) 再结合齿轮比,同步带周长或丝杆的间距,就可以确定我们达到要 求要发多少脉冲了。 2.2 参数调试 2.2.1 基本参数(伺服能够运行的前提) P1-00 设为2,表示脉冲+方向控制方式; P1-01 设为00 ,表示位置控制模式; P1-32 设为0 ,表示停止方式为立即停止; P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动 估算; P1-44,电子齿轮比分子; P1-45,电子齿轮比分母; P2-15,设为122; P2-16,设为123; P2-17,设为121。 2.2.2 扩展参数(伺服运行平稳必须的参数,可自 动整定,也可手动设置) P2-00 位置控制比例增益(提升位置应答性,缩小位置控制误差, 太大容易产生噪音)。 P2-04 速度控制增益(提升速度应答性,太大容易产生噪音)。
台达PLC台达B2伺服脉冲模式下按键在线调节掉电保持
台达DVP-PLC控制台达B2伺服脉冲速度模式下通过按键调节速度说 明---在线调节,掉电保持 1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度,再通过按键调节速度。 当正常启动PLC跟伺服系统后,按下X1,则系统以2000HZ频率开始旋转;当X3接通一次,则频率增加100,接通2次,频率增加200HZ,每次均增加100HZ。 当按下X2,则伺服电机停止,再按X1,则系统以2000HZ频率开始旋转。 2、相关设备型号 序号名称型号 1 PLC DVP28SV11S2 2 伺服控制器ASD-B2-0121-B 3 伺服电机ECMA-C20401ES 4 伺服电机与控制器接连线请咨询台达3、台达PLC接线 S/S接24V X1接常开再接0V X2接常开再接0V UP0接24V ZP0接0V
Y0接43,输入脉冲指令(位置指令脉冲+) Y3接39,控制方向(位置指令符号+)4、伺服控制器接线 14接0V 11跟17短接(采用24V内部供电模式) 35接0V 9接控制按钮再接0V 43接Y0(正脉冲指令输入) 39接Y3(正方向指令输入) L1C接火线,L1C跟R短接 L2C接火线,L2C跟S短接 注:伺服电机与控制器采用专用配线连接 5、PLC程序,详见文件夹中PDF,
6、伺服控制器设置(位置模式) 1.恢复出厂设置:P2-08 设置参数为10,P2-10 设置为101, p2-15设置为 0, p2-16 设置为0, p2-17设置为 0,重新上电。(不按上述设置,只改p2-08,会报错) 2.位置模式选择:P1-01 设置参数为00,重新上电。设置P1-00为2,脉冲+方向模式。(若设置P1-01为100,则方向为“-”方向,仅需改变设置P1-01) 3.设置DI1为Servo On:P2-10设置为101(默认初始值就是101) 4.设置电子齿轮比:根据功能具体要求确定合适的电子齿轮比。这里我们设置为160。设置P1-44和P1-45。 5.设置增益:P2-00,P2-02。电机抖动,这个参数设置的要小些。
20160310_台达伺服位置控制的应用和调试
台达伺服位置控制的应用和调试 1PLC和伺服驱动器的接线方式 天银一般只用位置(PT)模式标准接线(脉冲与方向的),只用9,14,35,37和41四个端子,其中:9号端子,伺服启动; 14号端子,COM-; 35号端子,指令脉冲的外部电源,COM+;(台达脉冲命令输入使用内部电源) 37号端子,伺服方向; 41号端子,伺服脉冲,外部输入脉冲的频率确定转动速度的大小,脉冲的个数来确定转动的角度。
2伺服参数调试 2.1脉冲个数确定le 如果我们拿到一台伺服驱动器,不知道参数是否正确,需要把P2-8设为10 即为恢复出厂设置。复位完成后既要开始设置参数,最先要搞清楚电机转一圈需要多少脉冲,计算公式如下: 分辨率 / 1圈脉冲数 = P1-44/P1-45 式中:P1-44,电子齿轮比分子 P1-45,电子齿轮比分母(一般不动) 再结合齿轮比,同步带周长或丝杆的间距,就可以确定我们达到要求要发多少脉冲了。 2.2参数调试 2.2.1基本参数(伺服能够运行的前提) P1-00 设为2,表示脉冲+方向控制方式; P1-01 设为00 ,表示位置控制模式; P1-32 设为0 ,表示停止方式为立即停止; P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动估算; P1-44,电子齿轮比分子; P1-45,电子齿轮比分母; P2-15,设为122; P2-16,设为123; P2-17,设为121。 2.2.2扩展参数(伺服运行平稳必须的参数,可自动整定,也可手动设置) P2-00 位置控制比例增益(提升位置应答性,缩小位置控制误差,太大容易产生噪音)。 P2-04 速度控制增益(提升速度应答性,太大容易产生噪音)。 P2-06 速度积分补偿(提升速度应答性,缩小速度控制误差,太大容易产生噪音)。 此外还需要把P2-15至P2-17 均设为0,分别代表正反转极限,紧急停止关闭。否则的话会导致伺服驱动器报警。此外如果有刹车的话还要把 P2-18设为108 (设定第一路数字量输出为电磁抱闸信号。)这些参数都是基于对伺服驱动器的数字输入(DI)输出(DO)功能定义表来设置。