GPS静态定位和动态定位
GPS数据采集与处理实习报告
实验一:静态GPS观测
实验目的:
1. 熟悉GPS静态相对定位原理、Sounth、Trimble、ashtech三种GPS接收机的使用。
2. 掌握GPS网的网形设计并独立设计出校园GPS控制网的布网方案。
3. 熟悉GPS静态测量的步骤。
4. 学会ashtech后处理软件的简单使用。
实习器材:
南方灵锐S86 GPS接收机4台,南方脚架4个。
静态相对定位原理:
GPS静态相对定位也称为差分GPS,采用载波相对定位观测量以及相位观测量的线性组合技术,削弱各类定位误差。作业时用两台GPS接收机安置在基线的两端,同步观测同4颗以上GPS卫星,以确定基线端点在WGS-84坐标系下的相对位置。GPS相对定位是通过测量GPS卫星到达接收机天线相位中心的时间,测定站星间的伪距。
方法和步骤
先将4台南方4台GPS接收机调为静态模式,设置卫星高度角为15°和采样间隔为15S。1.GPS静态相对定位的布网方案
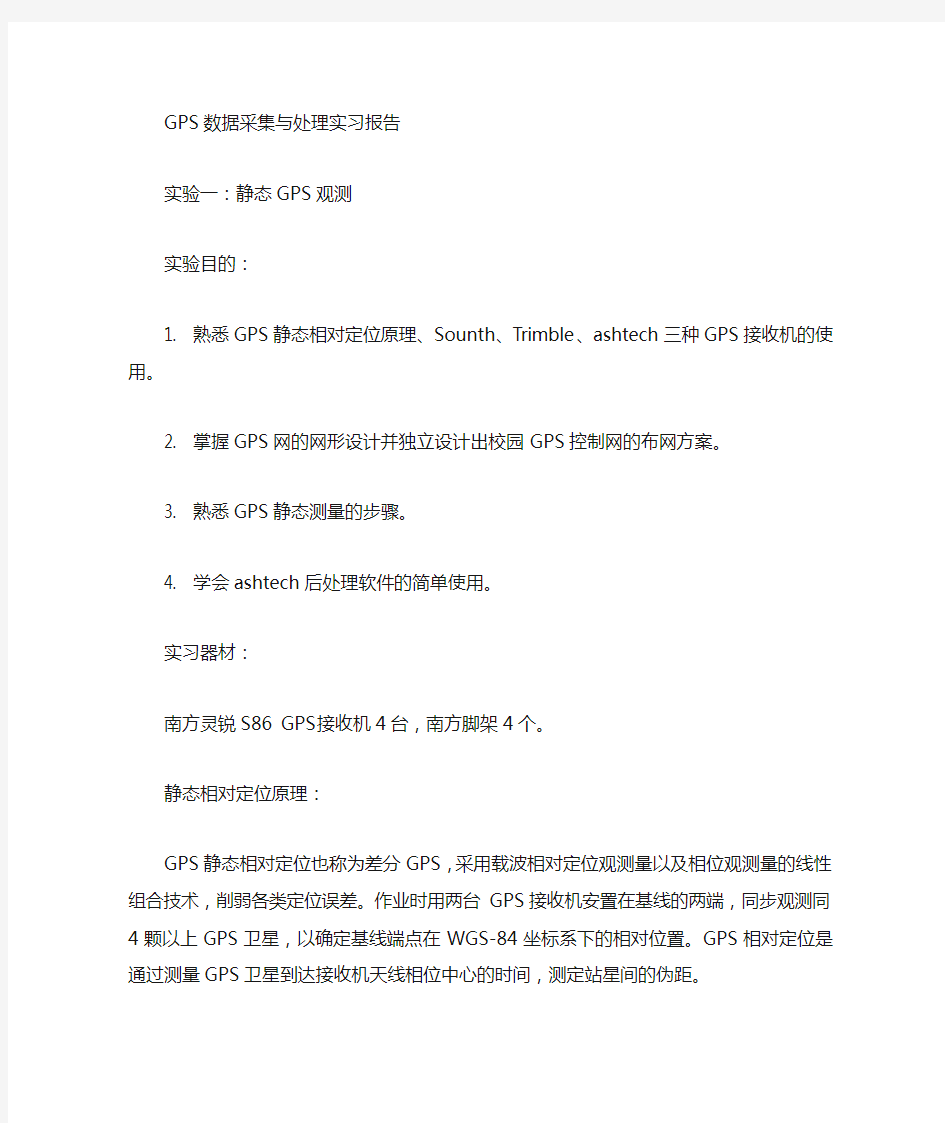
本次实习采用位于校园外三个已知点2803(工业街药店)、2804(良缘)、2801(解放广场)和校内的七个GPS点:G003、G006、G013、G012、G009、G008、G004 。布网如图:
实习时分四组同步观测相同的卫星,采用边连接的方式,第一时段:2803(第一组)—2804(第三组)—G008(第四组)—G012(第二组),第二时段:G008(第四组)—G012(第二组)—G013(第一组)—G009(第三组),第三时段:G013(第一组)—G009(第三组)—G003(第二组)—2800(第四组),第四时段:G003(第二组)—G009(第三组)—G004(第四组)—G006(第一组),第五时段:G006(第一组)—G009(第三组)—G008(第四组)--2804(第二组)。第五时段为补测时段,以消除外围的豁口。观测时由组长组织施测,由班长统一调配。
2.外业观测
1).在校园的GPS点上架设脚架,安置接收机,严格对中整平,记录GPS接收机型号,天线的型号,量取仪器高,记录在外业观测手簿上。等候班长通知开机。
2).开机,在观测手簿上记录开机时间。每一个时段观测45分钟左右。观测过程中不要碰接收机和脚架,观测者离接收机一定的距离,而且不使用干扰卫星信号的通讯设备,比如手
机等。
3).关机,记录关机时间,再次量取天线高,和开机前量取的天线高比较,两次误差≤3mm,记录在手簿上,若两次量取的天线高≤3mm,求其平均值,作为最后天线高,若两次天线高误差超限,查明原因,记录在手簿上。
3.数据处理
1).安装Ashtech solution软件。
2).将接收机与电脑通过电缆连接起来,将数据导入到电脑中。
3).打开Ashtech solution 2.5,选择“Creat a new proect”新建工程,设置工程名后,选择“Coordinate System”,先创建阜新地方独立坐标系,在System中选择local Grid,在local Grid 中输入“fuxin80”,点击后面的点号,进入后在Name中再次输入fuxin80,base Grid选择NEW,再点击Base Grid后的点号,进入后在System中输入fuxin80,在zone中选择NEW,再点击zone后的点号,进入后在Name中输入fuxin80,Geodatic中选择NEW,进入,Name中输入fuxin80,Eillpsoid中选择NEW,进入,Name中输入fuxin80,Semi-Major Axis中输入6378140,在Inverse Flattening中输入298.257,之后点击OK,在Zone Definition Dialog对话框中设置中央子午线经度为121°30′00.00″E放大比例中输入1,懂坐标假值输入500000m,一直选OK,完成阜新地方坐标系的新建。
4).完成工程新建后,选择“Add raw data from disk”,添加数据,每次添加时将同一时段的数据一起添加,将数据导入到软件中。
5).打开map view,在workbook中改变GPS点号、天线高和天线型号,再将Epochs值小的数据删除。
6).选择“Run”→“Processing”→“All”,map view窗口可以看见GPS点按照观测时段连成网。去除浮点解的记录。选择“Run”→“Adjustment”进行无约束平差,在查看Δx、Δy、Δz的精度情况,在输入控制点2802坐标,进行约束平差,再输入2804点坐标,进行约束平差。
7).点击Report选择Site Position生成报告。报告内容见下页。
注意事项
1.静态测量时要满足相应规范的要求。
2.网形布设时应注意外围不能有豁口,至少留一个通视方向。
3.静态观测过程中,即使发现长水准管不居中或者仪器不严格对中了,也不要重新调仪器,观测时不要重新开机,开机关机听从调配。
4.观测时,接收机周围不使用干扰卫星信号的通讯设备,以减弱误差,接收机周围应当视野开阔,削弱多路径误差。
5.每日观测结束后,应及时将数据转存至计算机硬件上,应该备份一份确保观测数据不应人为疏忽丢失。
6.数据处理时,一定要改天线类型、天线高,去除浮点解的记录。
Site Positions
kn
Horizontal Coordinate System: fuxin80 Date: 12/27/09
Height System: Ellips. Ht. Projectfile: kn.spr
Desired Horizontal Accuracy: 0.020m + 1ppm
Desired Vertical Accuracy: 0.040m + 2ppm
Confidence Level: 95% Err.
Linear Units of Measure: Meters
_______________________________________________________________________________ _______
Site 95% Fix Position
ID Site Descriptor Position Error Status Status
1 G721 East. 513031.888 0.011 Adjusted
Nrth. 4653944.564 0.014
Elev. 175.275 0.017
2 G121 East. 513054.126 0.008 Adjusted
Nrth. 4654243.088 0.009
Elev. 175.671 0.013
3 280
4 East. 513873.869 0.000 Fixed Adjusted
Nrth. 4654276.105 0.000 Fixed
Elev. 143.102 0.000 Fixed
4 G612 East. 513154.737 0.009 Adjusted
Nrth. 4653940.897 0.010
Elev. 170.324 0.013
5 G111 East. 512925.605 0.010 Adjusted
Nrth. 4654147.388 0.011
Elev. 181.078 0.015
6 G443 East. 513447.343 0.002 Processed
Nrth. 4653821.907 0.004
Elev. 156.874 0.006
7 G821 East. 513106.686 0.009 Adjusted
Nrth. 4654042.582 0.012
Elev. 172.415 0.015
8 G912 East. 513159.518 0.008 Adjusted
Nrth. 4654102.116 0.009
Elev. 170.348 0.012
9 2802 East. 513417.200 0.000 Fixed Adjusted
Nrth. 4654497.701 0.000 Fixed
Elev. 161.111 0.000 Fixed
10 G521 East. 513339.860 0.002 Processed
Nrth. 4653870.189 0.004
Elev. 155.974 0.004
11 I211 East. 513005.405 0.010 Adjusted
Nrth. 4654045.704 0.010
Elev. 177.349 0.014
12 G604 East. 513155.500 0.002 Processed
Nrth. 4653940.881 0.004
Elev. 156.246 0.006
13 G301 East. 513234.587 0.000 Processed
Nrth. 4653753.181 0.000
Elev. 156.558 0.000
实验二:动态GPS观测
实验目的
1. 掌握RTK的测量原理和作业流程
2. 学会RTK手簿的使用
实验仪器
南方灵锐S86 GPS双频接收机。
RTK原理
在两台静态型测量仪器间加上一套无线电数据通讯系统(也称数据链),将相对独立的GPS 信号接收系统连成一个有机整体。由流动站和基准站组成。基准站把接收到的所有卫星信息(包括伪距和载波相位观测值)和基准站的一些信息(如基准站的坐标、天线高等)都通过通讯系统传送到流动站。流动站本身在接收卫星数据的同时,也接收基准站传送的卫星数据,在流动站完成初始化后,并将基准站的载波观测信号与本身接收到的载波观测信号进行差分处理(基线),同时输入相应的坐标,转换参数和投影参数,即可实时求得实用的未知坐标。方法和步骤
1.基准站和移动站设置
1).基准站的设置。
在已知点上架设脚架,固定基座,严格对中整平后安放基准站接收机,测量仪器高。开机,将接收机调整为基准站模式,设置差分格式为RTCM3、电台频道为3。观察DX和TX指示灯,TX灯闪表示基准站向外发送数据,DX灯闪表示基准站接收卫星信号。
2).移动站的设置
1.将移动站主机连接在碳纤对中杆上,将接收天线接在主机上,调节GPS接收机至移动站模式。
2.打开主机,主机开始自动初始化和搜索卫星,当达到一定的条件后,主机上的RX指示灯开始1秒钟闪1次,表明已经收到基准站差分信号。
3.打开手簿,启动工程之星软件。
4. 设置文件保存路径,新建工程和文件。工程→新建工程(椭球系名称、投影参数设置、七参数设置),工程→选择工程,工程→新建文件,工程→选择文件;
5.连接仪器,搜索到移动站对应的接收机号,通过蓝牙将移动站和手簿连接在一起。设置→连接仪器→扫描→(选择主机)连接;
6.电台设置:工具→电台设置→在“切换通道号”后选择3→点击“切换”;
7.设置移动站参数:设置差分格式:RTCM3,设置天线高;
2.校正
基准站架在已知点时,启动“工程之星”,选择“基准站架设在已知点”,点击“下一步”,输入基准站架设点的已知坐标及天线高,并且选择天线高形式(斜高),输入完后即可点击“校正”。,检查无误后“确定”校正完毕。
3.目标点测量
当以上步骤设置完毕后,可以按键盘上的A键进行目标点测量,然后按Enter键保存。测量已有的点时,使碳素对中杆的水中气泡对中,将手簿上测得的坐标高程与原有的坐标高程比较。
注意事项
1.在RTK测量时,要按照测量规范,流动站和基准站尽量在5公里范围之内。
2.基准站应架设在视野开阔,视场15°以内没有障碍物的已知点上,若在丘陵山区,基准站尽量架设在高处,使得基准站发射的信号能被流动站接收到。若已知点难以满足作为基准站的需要,可以将基准站架设在位置点上,校正时选择“基准站架设在未知点”,找三个已知点进行校正。
3.确保基准站和流动站的差分格式和电台频道是相同的。
4.在校园内进行RTK测量时,基准站和流动站间的距离很短,测量目标点的时候要注意随时查看是否是固定解,误差是否足够小,满足精度要求,只保留固定解的记录。
实习总结
通过一周的实习,对GPS静态测量和动态测量有了深刻的理解,将之前停留在书本知识阶段延伸到了实际操作阶段,实习过程中,不仅对原理有了更进一步的理解,还在操作中熟练了步骤,整平对中的速度相比以前快很多,掌握了GPS布网的原则和优化,校园内高大树木和建筑物很多,影响GPS精度,在选点尽量避免选择这些点。还学会了对南方GPS仪器的设置,掌握了Ashtech solution GPS后处理软件的简单使用。
实习过程虽然受环境因素限制,天气严寒,但每组组员都能够克服困难,坚持到晚上6点,将五个时段全部观测完,大家协力将整个实习做的很完善,这与老师的指导也是分不开的。