转速、电流双闭环直流调速系统
第2章转
和调节器的工程设计方法
2.1 转速、电流双闭环直流调速系统及其静特性
采用PI调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。
在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。这样的理想起动过程波形示于图2-1b。
为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值
dm
I的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。
2.1.1 转速、电流双闭环直流调速系统的组成
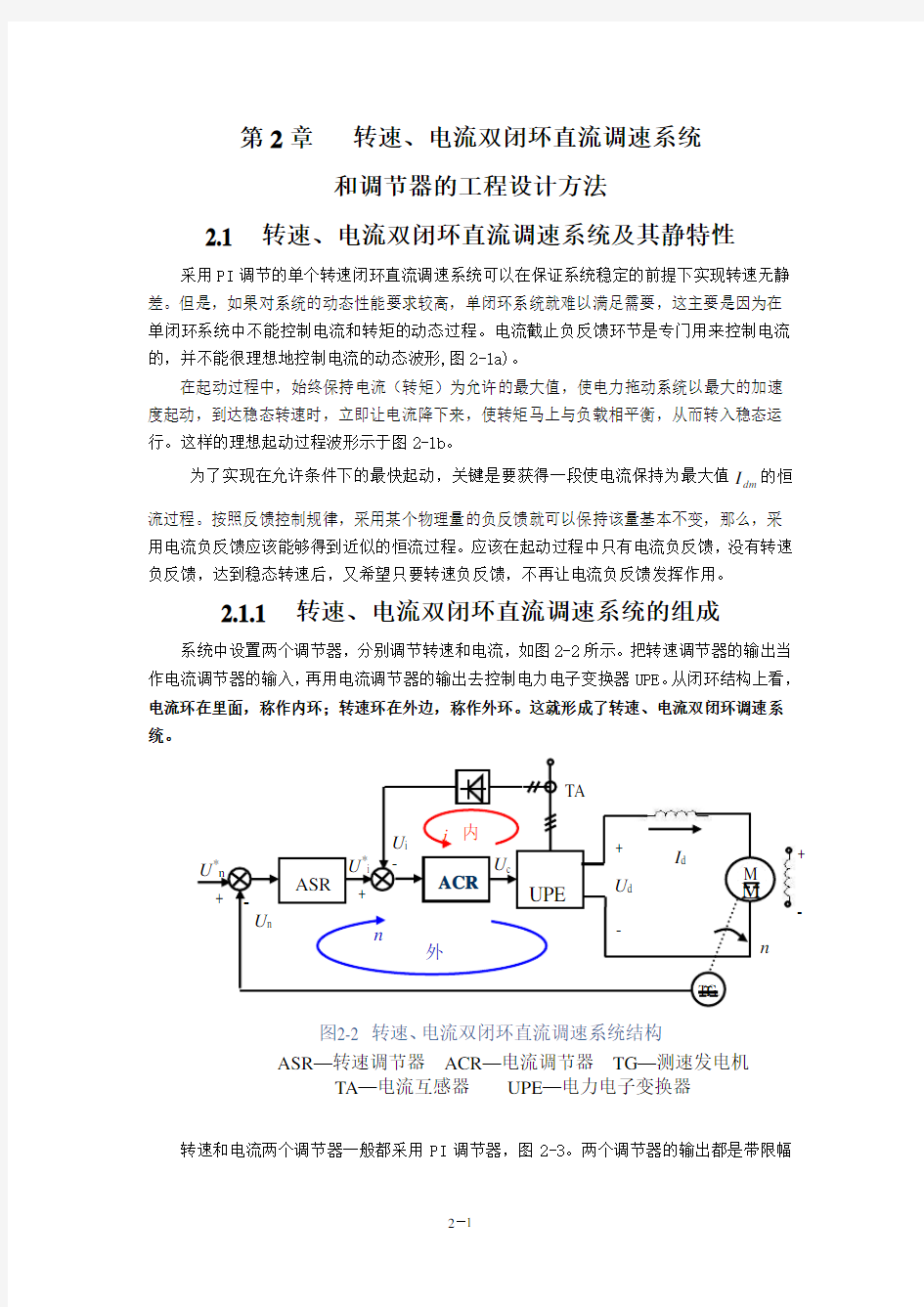
系统中设置两个调节器,分别调节转速和电流,如图2-2所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。这就形成了转速、电流双闭环调速系统。
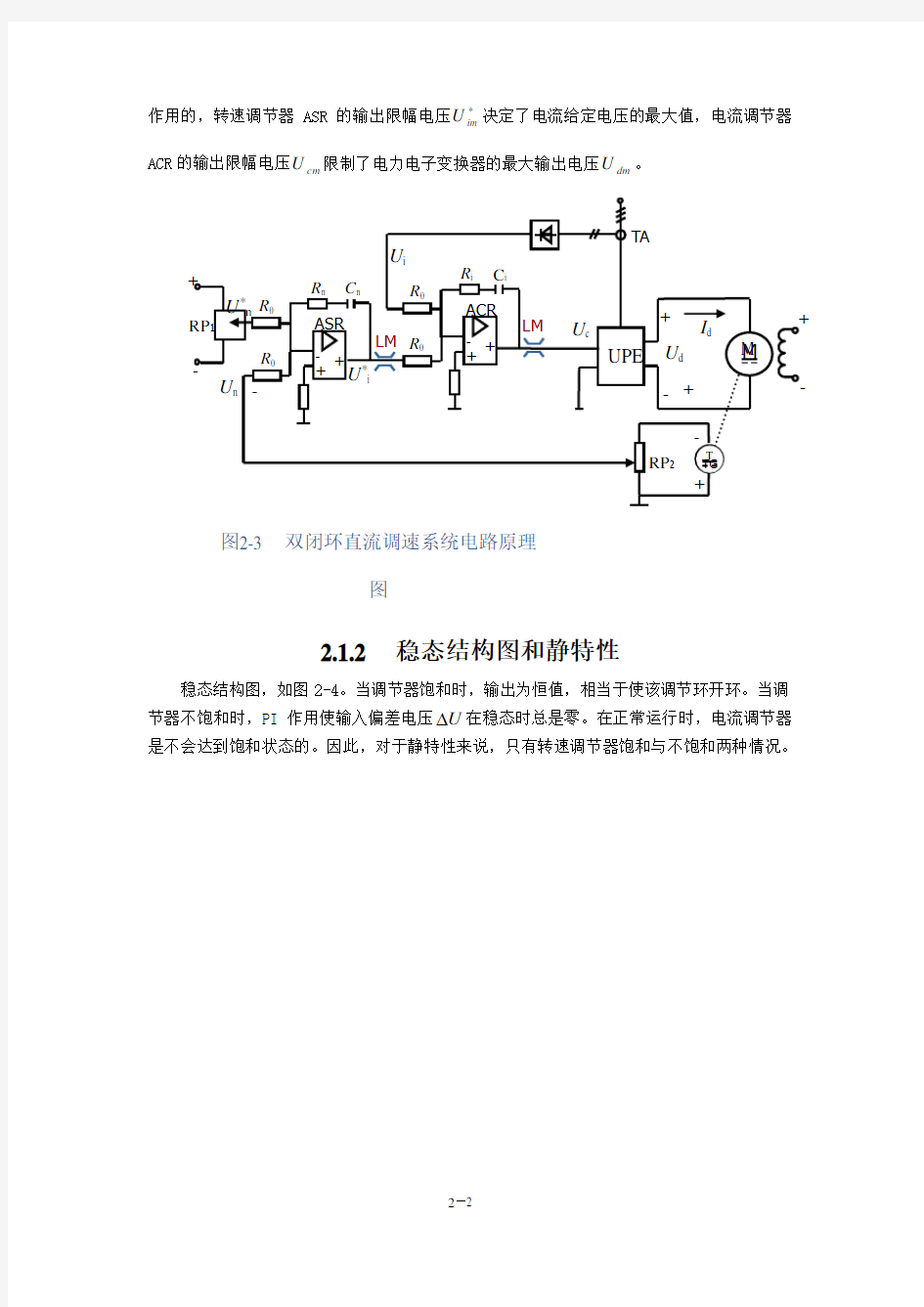
转速和电流两个调节器一般都采用PI调节器,图2-3。两个调节器的输出都是带限幅+ -
作用的,转速调节器ASR 的输出限幅电压*
im U 决定了电流给定电压的最大值,电流调节器
ACR 的输出限幅电压cm U 限制了电力电子变换器的最大输出电压dm U 。
2.1.2 稳态结构图和静特性
稳态结构图,如图2-4。当调节器饱和时,输出为恒值,相当于使该调节环开环。当调节器不饱和时,PI 作用使输入偏差电压U 在稳态时总是零。在正常运行时,电流调节器是不会达到饱和状态的。因此,对于静特性来说,只有转速调节器饱和与不饱和两种情况。
图2-3 双闭环直流调速系统电路原理
图
1. 转速调节器不饱和
稳态时,0*
n n U U n n αα===、d i i I U U β==*,βα,——转速和电流反馈系数。
0*
n U n n
==
α
,图2-5静特性的CA 段。dm d I I <,CA 段静特性从理想空载状态的0
=d I 一直延续到dm d I I =,而dm I 一般都是大于额定电流dN I 的。这就是静特性的运行段,它是水平的特性。 2. 转速调节器饱和
ASR 输出达到限幅值*
im U ,转速外环呈开环状态,成电流无静差的单电流闭环调节系统。
稳态时dm im
d I U I ==
β
*
, dm I 为最大电流。静特性是图2-5中的AB 段,它是垂直的特性。
这样的下垂特性只适合于0n n <的情况,因为如果0n n >,则*
n n U U >,ASR 将退出饱和
状态。
双闭环调速系统的静特性在负载电流小于dm I 时表现为转速无静差,转速负反馈起主要
调节作用。当负载电流达到dm I 时,对应于转速调节器的饱和输出*im U ,这时,电流调节器
起主要调节作用,系统表现为电流无静差,得到过电流的自动保护。
2.1.3 各变量的稳态工作点和稳态参数计算
当两个调节器都不饱和时,0*
n n U U n n αα===、dL d i i I I U U ββ===*、
s
dL n e s d e s d c K R
I U C K R I n C K U U +=
+==α/*
0。 转速n 由给定电压*
n U 决定的,ASR 的输出量*i U 是由负载电流dL I 决定的,而控制电压c U 的大小则同时取决于n 和d I ,或者说,同时取决于*n U 和dL I 。
P 调节器的输出量总是正比于其输入量,而PI 调节器则不然,PI 调节器未饱和时,其输出量的稳态值是输入的积分,最终使PI 调节器输入为零,才停止积分。
转速反馈系数max
*
n U nm =α,电流反馈系数dm im
I U *=β。
2.2 双闭环直流调速系统的数学模型和动态性能分析
2.2.1 双闭环直流调速系统的动态数学模型
双闭环直流调速系统的动态结构图,如图2-6所示。图中)(s W ASR 和)(s W ACR 分别表示转速调节器和电流调节器的传递函数。
2.2.2 起动过程分析
双闭环直流调速系统突加给定电压*
n U 由静止状态起动时,转速和电流的动态过程示
于图2-7。由于在起动过程中转速调节器ASR 经历了不饱和、饱和、退饱和三种情况,整个动态过程就分成图中标明的I 、II 、III 三个阶段。
第I 阶段(1~0t )是电流上升阶段。突加给定电压*
n U 后,c U 、0d U 、d I 都上升,
在d I 没有达到负载电流dL I 以前,电机还不能转动。当dL d I I ≥后,电机开始起动,由于机
电惯性的作用,转速不会很快增长,因而转速调节器ASR 的输入偏差电压n n n U U U -=?*的数值仍较大,其输出电压保持限幅值*im U ,强迫电流d I 迅速上升。直到dm d I I ≈,*im
i U U ≈,电流调节器很快就压制了d I 的增长,标志着这一阶段的结束。在这一阶段中,ASR 很快进入并保持饱和状态,而ACR 不饱和。
第II 阶段(21~t t )是恒流升速阶段,ASR 饱和,转速环相当于开环,在恒值电流给
定*im U 下的电流调节系统,基本上保持电流d I 恒定,因而系统的加速度恒定,转速呈线性
增长。与此同时,电机的反电动势E 也按线性增长,对电流调节系统来说,E 是一个线性渐增的扰动量,为了克服它的扰动,0d U 和c U 也必须基本上按线性增长,才能保持d I 恒定。
当ACR 采用PI 调节器时,要使其输出量按线性增长,其输入偏差电压i im i U U U -=?*必须
维持一定的恒值,也就是说,d I 应略低于dm I 。
第Ⅲ阶段(2t 以后)是转速调节阶段。当转速上升到给定值0*n n =时,转速调节器ASR
的输入偏差减小到零,输出维持在限幅值*im U ,电机仍在加速,使转速超调。转速超调后,
ASR 输入偏差电压变负,开始退出饱和状态,*i U 和d I 很快下降。但是,只要d I 仍大于负载电流dL I ,转速就继续上升。直到d I =dL I 时,转矩L e T T =,则dn/dt =0,转速n 才到达峰值(3t t =时)。此后,电动机开始在负载的阻力下减速,与此相应,在43~t t 时间内,
d I dL I <,直到稳定。如果调节器参数整定得不够好,也会有一段振荡过程。在这最后的转
速调节阶段内,ASR 和ACR 都不饱和,ASR 起主导的转速调节作用,而ACR 则力图使d I 尽快地跟随其给定值*i U 。
双闭环直流调速系统的起动过程有以下三个特点:饱和非线性控制;转速超调;准时间最优控制。
2.2.3 动态抗扰性能分析
一般来说,双闭环调速系统具有比较满意的动态性能。对于调速系统,最重要的动态性能是抗扰性能。主要是抗负载扰动和抗电网电压扰动的性能。
1、抗负载扰动
负载扰动作用在电流环之后,因此只能靠转速调节器ASR 来产生抗负载扰动的作用。
图2-7 抗负载扰动
2、抗电网电压扰动
电网电压变化对调速系统也产生扰动作用,图2-8。双闭环系统中,由于增设了电流内环,电压波动可以通过电流反馈得到比较及时的调节。
图2-8 抗电网电压波动
2.2.4 转速和电流两个调节器的作用
1. 转速调节器的作用
U变化,
(1)转速调节器是调速系统的主导调节器,它使转速n很快地跟随给定电压*
n
稳态时可减小转速误差,如果采用PI调节器,则可实现无静差。
(2) 对负载变化起抗扰作用。
(3)其输出限幅值决定电机允许的最大电流。
2. 电流调节器的作用
(1)作为内环的调节器,在转速外环的调节过程中,它的作用是使电流紧紧跟随其给
U(即外环调节器的输出量)变化。
定电压*
i
(2)对电网电压的波动起及时抗扰的作用。
(3)在转速动态过程中,保证获得电机允许的最大电流,从而加快动态过程。
(4)当电机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用。一旦故障消失,系统立即自动恢复正常。这个作用对系统的可靠运行来说是十分重要的。
2.3 调节器的工程设计方法
必要性: 设计调节器须同时解决稳、准、快、抗干扰等各方面相互有矛盾的静、动态性能要求。
可能性: 电力拖动自动控制系统可由低阶系统近似,事先研究低阶典型系统的特性,将实际系统校正成典型系统,设计过程就简便多了。建立调节器工程设计方法所遵循的原则是:(1)概念清楚、易懂;
(2)计算公式简明、好记;
(3)不仅给出参数计算的公式,而且指明参数调整的方向;
(4)能考虑饱和非线性控制的情况,同样给出简单的计算公式;
(5)适用于各种可以简化成典型系统的反馈控制系统。
2.3.1 工程设计方法的基本思路
调节器的设计过程分作两步:
第一步,先选择调节器的结构,以确保系统稳定,同时满足所需的稳态精度。 第二步,再选择调节器的参数,以满足动态性能指标的要求。
在选择调节器结构时,采用少量的典型系统,它的参数与系统性能指标的关系都已事先找到,就使设计方法规范化,大大减少了设计工作量。
2.3.2 典型系统
控制系统的开环传递函数可表示∏∏==++=
n
i i r m
j j s T s s K s W 1
1)
1()
1()(τ
分母中的r
s 项表示该系统在原点处有r 重极点,根据0=r ,1,2,……等不同数值,分别称
作0型、I 型、Ⅱ型、……系统。0型系统稳态精度低,而Ⅲ型和Ⅲ型以上的系统很难稳定。因此,为了保证稳定性和较好的稳态精度,多用I 型和II 型系统。
1、典型I 型系统
典型I 型系统开环传递函数为)
1()(+=
Ts s K
s W ,T —系统的惯性时间常数;K —系
统的开环增益。闭环系统结构图示于图2-9a ,图2-9b 表示它的开环对数频率特性。
a)
b)
图2-9 典型I 型系统
典型I 型系统结构简单,对数幅频特性的中频段以20-dB/dec 的斜率穿越零分贝线,只要参数的选择能保证足够的中频带宽度,系统就一定是稳定的,且有足够的稳定裕量。
当T
c 1
<
ω或1
)
(s R )
1(+Ts s K )
(s C dB/dec
dB/dec
2、典型Ⅱ型系统
典型Ⅱ型系统开环传递函数为)
1()
1()(2++=
Ts s s K s W τ,闭环系统结构图和开环对数频率特
性示于图2-10,中频段也是以20-dB/dec 的斜率穿越零分贝线。
图2-10 典型Ⅱ型系统开环频率特性
当
T
c 1
1
<
<ωτ
或T >τ时,相角稳定裕度 T arctg arctg T arctg arctg c c c c ωτωωτωγ-=-+-= 180180
τ比T 大得越多,则系统的稳定裕度越大。
2.3.3 控制系统的动态性能指标
自动控制系统的动态性能指标包括对给定输入信号的跟随性能指标和对扰动输入信号的抗扰性能指标。一般来说,调速系统的动态指标以抗扰性能为主,而随动系统的动态指标则以跟随性能为主。
1、跟随性能指标
常用的阶跃响应跟随性能指标有上升时间、超调量和调节时间,图2-11。
O
图2-11 动态响应
2、抗扰性能指标 控制系统稳定运行中,突加一个使输出量降低的扰动量F 以后,输出量由降低到恢复的过渡过程是系统典型的抗扰过程,如图2-12所示。常用的抗扰性能指标为动态降落和恢复时间。
图2-12 典型的抗扰过程
2.3.4 典型I 型系统性能指标和参数的关系
典型I 型系统的开环传递函数包含两个参数:开环增益K 和时间常数T 。
其中,时间常数T 在实际系统中往往是控制对象本身固有的,能够由调节器改变的只有开环增益K ,也就是说,K 是唯一的待定参数。
图2-13绘出了在不同K 值时典型I 型系统的开环对数频率特性,当T
c 1
<
ω时,特性以-20dB/dec 斜率穿越零分贝线,系统有较好的稳定性。由图中的特性可知
±5%(或±2%)
∞C ∞
-C C m a x m a x
C ∞
C 0
t
O
t r t s
)
(t C m a x
C ?1
∞C 2
∞C ±5%(或±2%)
C
N
N
O
t
t
t v
C
c c K ωωlg 20)1lg (lg 20lg 20=-=,所以c K ω=(当T
c 1
<
ω时)。K 越大,截止频率c ω也越大,系统响应越快,但相角稳定裕度T arctg c ωγ-=090越小,这也说明快速性与稳定性之间的矛盾。
图2-13 不同K 值时典型I 型系统的开环对数频率特性
1、典型I 型系统跟随性能指标与参数的关系 (1)稳态跟随性能指标
不同输入信号作用下的稳态误差:在阶跃输入下的I 型系统稳态时是无差的,但在斜坡输入下则有恒值稳态误差,且与K 值成反比,在加速度输入下稳态误差为∞。
(2)动态跟随性能指标
典型I 型系统是一种二阶系统,闭环传递函数的一般形式为
2
22
2)()
()(n
n n cl s s s R s C s W ωξωω++==,
n ω—无阻尼时的自然振荡角频率,或称固有角频率;ξ—阻尼比,或称衰减系数。
参数K 、T 与标准形式中的参数n ω、ξ之间的换算关系如下T K n =ω,KT
1
21=ξ,且T
n 21
=
ξω。当1<ξ时,欠阻尼的振荡特性,当1>ξ时,过阻尼的单调特性;当1=ξ时,是临界阻尼。
由于过阻尼特性动态响应较慢,一般把系统设计成欠阻尼状态,即10<<ξ。典型I 型系统中,1
欠阻尼二阶系统在零初始条件下的阶跃响应动态指标:
超调量:%100%)
1/(2?=--ξξπσe
,上升时间:)arccos (122
ξπξ
ξ--=
T t r ,
峰值时间:2
1ξ
ωπ-=
n p t 。
2. 典型I 型系统抗扰性能指标与参数的关系
图2-14a 是在扰动量F 作用下的典型I 型系统,其中,)(1s W 是扰动作用点前面部分的传递函数,后面部分是)(2s W ,于是)
1()()()(21+=
=Ts s K
s W s W s W 。只讨论抗扰性能时,
可令输入变量0=R ,这时输出变量可写成C ?。将扰动作用)(s F 前移到输入作用点上,即得图2-14b 所示的等效结构图。
图2-14
在扰动作用下输出变化量C ?的象函数为)
(1)
()()()(1s W s W s W s F s C +?=
?,若 )1()1()(1211++=
s T s s T K s W 、1
)(22
2+=s T K s W ,)()()(21s W s W s W =,属典型I 型系统。
)
a )
b 0
)(=s R )
(2s W )
(1s W )
(s F )
()(s C s C ?=)
(s N )
(11s W )
(s W )
(s C ?典型I 型系统
)
(s F
在阶跃扰动s
F
s F =
)(下, )
)(1()1(1
1)()(1)()(2
222122
212K s Ts s T Ts FK Ts s s T FK s W s W s W s F
s C ++++=+++=+?=? 当5.0=KT ,则)
122)(1()
1(2)(2
222++++=
?Ts s T s T Ts T FK s C , 阶跃扰动后输出变化量的动态过程函数,
]2sin 2cos )1()1[(1
222)(2/2//2
22T t me T t e m e m m m m FK t C T
t T t T t ---+---+-=
? 式中12
1
<=
T T m ——控制对象中小时间常数与大时间常数的比值。 输出量的最大动态降落max C ?用基准值b C 的百分数表示,所对应的时间m t 用时间常数T 的倍数表示,允许误差带为±5%b C 时的恢复时间v t 也用T 的倍数表示。为了使b C C /max ?和T t v /的数值都落在合理范围内,将基准值b C 取为22
1
FK C b =
。 表2-3 典型I 型系统动态抗扰性能指标与参数的关系
由表2-3中的数据可以看出,当控制对象的两个时间常数相距较大时,动态降落减小,
但恢复时间却拖得较长。
2.3.5 典型II 型系统性能指标和参数的关系
典型II 型系统的开环传递函数中时间常数T 也是控制对象固有的。所不同的是,待定的参数有两个:K 和τ。令1
2
ωωτ
=
=
T
h , h 是斜率为-20dB/dec 的中频段的宽度(对数坐标),称作“中频宽”,图2-16典型Ⅱ型系统的开环对数幅频特性和中频宽。
采用“振荡指标法”中的闭环幅频特性峰值r M 最小准则,可以找到h 和c ω两个参数之间的一种最佳配合,
122+=
h h c ωω、2
11+=h c ωω, 确定了h 和c ω之后,则hT =τ,2222
1121
21)1(21T
h h h hT h K c +=+=+?
==ωωω。 1.典型II 型系统跟随性能指标和参数的关系 (1)稳态跟随性能指标
典型Ⅱ型系统在不同输入信号作用下的稳态误差
在阶跃输入和斜坡输入下,Ⅱ型系统在稳态时都是无差的,在加速度输入下,稳态误差的大小与开环增益K 成反比。
(2)动态跟随性能指标
当h 取不同值时,对应的单位阶跃响应函数)/(T t C ,从而计算出σ%、T t r /、T t s /和振荡次数k 。采用数字仿真计算的结果列于表2-6中。
表2-6 典型Ⅱ型系统阶跃输入跟随性能指标(按min r M 准则确定参数关系)
2、典型Ⅱ型系统抗扰性能指标和参数的关系 典型Ⅱ型系统抗扰结构图2-17a ,)
1()
1()(11++=
Ts s hTs K s W 、s K s W 22)(=,
)()
1()
1()()(2
21s W Ts s hTs K s W s W =++=
,属典型Ⅱ型系统。 在阶跃扰动下,s F s F /)(=,11
212)1(12)(222
332222
+++++++=?hTs s T h h
s T h h Ts T FK h h s C , 取输出量基准值为T FK C b 22=。
表2-7 典型Ⅱ型系统动态抗扰性能指标与参数的关系
(控制结构和扰动作用点如图2-17所示,参数关系符合min r M 准则)
一般来说,h 值越小,b C C /max ?也越小,m t 和v t 都短,因而抗扰性能越好,但是,当5 典型I 型系统和典型Ⅱ型系统除了在稳态误差上的区别以外,在动态性能中,一般来说,典型I 型系统在跟随性能上可以做到超调小,但抗扰性能稍差,而典型Ⅱ型系统的超调量相对较大,抗扰性能却比较好。这是设计时选择典型系统的重要依据。 2.3.6 调节器结构的选择和传递函数的近似处理——非典型系统的典型化 1、调节器结构的选择 确定了要采用哪一种典型系统之后,选择调节器的方法就是把控制对象与调节器的传递函数相乘,匹配成典型系统。 2、传递函数的近似处理 (1)高频段小惯性环节的近似处理 系统的开环传递函数为) 1)(1)(1() 1()(321++++= T s T s T s s K s W τ,2T 和3T 是小时间常 数,近似为 1)(1)1)(1(13232++≈ ++s T T s T s T ,近似的条件是3 231 T T c ≤ω。 (2)高阶系统的降阶近似处理 忽略特征方程的高次项。以三阶系统为例,1 )(2 3+++= cs bs as K s W ,其中c b a ,,都是正系数,且a bc >,即系统是稳定的。忽略高次项,可得近似的一阶系统的传递函数为 1)(+≈ cs K s W ,近似条件),1min(31a c b c ≤ω。 (3)低频段大惯性环节的近似处理 一个时间常数特别大的惯性环节11+Ts 时,可以近似地将它看成是积分环节Ts 1 ,近似条件T c 3 ≥ ω。 2.4 按工程设计方法设计双闭环系统的调节器 用工程设计方法来设计转速、电流双闭环调速系统的两个调节器,先内环后外环。首先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器。 双闭环调速系统的动态结构图图2-22,不同之处在于增加了滤波环节,包括电流滤波、转速滤波和两个给定信号的滤波环节。 2.4.1 电流调节器的设计 1、电流环结构图的化简 转速的变化往往比电流变化慢得多,对电流环来说,反电动势是一个变化较慢的扰动,在电流的瞬变过程中,可以认为反电动势基本不变,即0≈?E 。把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成 β ) (*s u i ,则电流环便等效成单位负反馈系统 (图2-23b )。s T 和oi T 一般都比l T 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为oi s i T T T +=∑,则电流环结构图最终简化成图2-23c 。 2、电流调节器结构的选择 电流环应以跟随性能为主,应选用典型I 型系统,应采用PI 型的电流调节器,其传递函数可以写成s s K s W i i i ACR ττ) 1()(+=,i K —电流调节器的比例系数;i τ—电流调节器的超 前时间常数。 3、电流调节器的参数计算 调节器零点与控制对象的大时间常数极点对消,选择l i T =τ,则电流环的动态结构图便成为图2-24a 所示的典型形式,其中R K K K i s i I τβ =,图2-24b 校正后电流环的开环对数幅频特性。 希望电流超调量%5%≤i σ,可选ξ=0.707,5.0=∑i I T K ,i ci I T K ∑= =21 ω, 即)(22i l s i s l i T T K R T K R T K ∑∑== ββ。 4、电流调节器的实现 含给定滤波和反馈滤波的模拟式PI 型电流调节器原理图示于图2-25。图中*i U 为电流给定电压,d I β-为电流负反馈电压,调节器的输出就是电力电子变换器的控制电压c U 。 可以导出0 R R K i i = 、i i i C R =τ、oi oi C R T 041=。 2.4.2 转速调节器的设计 1、电流环的等效闭环传递函数 电流环经简化后可视作转速环中的一个环节,它的闭环传递函数)(s W cli 1 11 )1(1)1(/)()()(2*++= +++==∑∑∑s K s K T s T s K s T s K s U s I s W I I i i I i I i d cli β 忽略高次项,)(s W cli 可降阶近似为11 1)(+≈ s K s W I cli ,近似条件i I cn T K ∑≤ 31ω。 电流环在转速环中应等效为111 )() ()(*+≈=s K s W s U s I I cli i d β β。 原来是双惯性环节的电流环控制对象,经闭环控制后,可以近似地等效成只有较小时间常数 I K 1 的一阶惯性环节。这就表明,电流的闭环控制改造了控制对象,加快了电流的跟随作用,这是局部闭环(内环)控制的一个重要功能。 2、转速调节器结构的选择 转速控制系统的动态结构图如图2-26a 所示,把转速给定滤波和反馈滤波环节移到环内,同时将给定信号改成α/)(* s U n ,再把时间常数为 I K 1 和on T 的两个小惯性环节合并起来,近似成一个时间常数为n T ∑的惯性环节,on I n T K T += ∑1 ,转速环结构图可简化成图2-26b 。 为了实现转速无静差,在负载扰动作用点前面必须有一个积分环节,它应该包含在转速调节器ASR 中,在扰动作用点后面已经有了一个积分环节,因此转速环开环传递函数应共有两个积分环节,所以应该设计成典型Ⅱ型系统。 ASR 也应该采用PI 调节器s s K s W n n n ASR ττ) 1()(+=,n K —转速调节器的比例系数;n τ—转速调节器的超前时间常数。 调速系统的开环传递函数为 ) 1() 1()1()1()1()1()(2 2++=++=+?+= ∑∑∑s T s s K s T s T C s R K s T s T C R s s K s W n n N n m e n n n n m e n n n n τβτταβ αττ 开环增益N K ,m e n n N T C R K K βτα= ,校正后的调速系统动态结构图示于图2-26c 。 3、转速调节器的参数计算 按照典型Ⅱ型系统参数关系,n n hT ∑=τ、2 221 n N T h h K ∑+=,因此,n m e n RT h T C h K ∑+=αβ2)1(,一般以选择5=h 。 4、转速调节器的实现 转速调节器参数与电阻、电容值的关系为0 R R K n n = 、n n n C R =τ、on on C R T 041 =。 2.4.3 转速调节器退饱和时转速超调量的计算 突加给定电压后,转速调节器很快就进入饱和状态,当转速上升到给定值* n 时,转速偏差电压变成负值,ASR 退出饱和,因此在起动过程中转速必然超调。不是按线性系统规律的超 调,而是经历了饱和非线性区域之后的超调,称作“退饱和超调”。退饱和超调量不等于典型II 型系统跟随性能指标中的超调量。 ASR 饱和时,相当于转速环开环,电流是恒值dm I ,延续到* n n =时为止,退饱和初始条件:dm d I I n n ==)0(, )0(*。 考虑实际转速与给定转速的差值* n n n -=?,转速退饱和超调动态结构图2-29b ,把n ?的负反馈作用反映到主通道第一个环节的输出量上来,得图2-29c ,为了保持各量间的加减关系不变,符号作相应的变化。 典型II 型系统,在dm d I I =、* n n =稳定运行,突然将负载由dm I 减小到dL I ,转速会产生一个动态速升与恢复的过程,这样的突卸负载速升过程也就是退饱和转速超调过程。 在典型II 型系统抗扰性能指标中,C ?的基准值T FK C b 22=,退饱和转速超调n ?的基准值m e dL dm n b T C I I RT n )(2-= ?∑或m n N b T T n z n ∑?-=?)(2λ。 转速超调量n σ%,其基准值应该是* n ,经基准值换算后得 m n N b b b n T T n n z C C n n C C ∑??-?=??=*max *max )%)((2%)( %λσ 外环的响应比内环慢,这是按上述工程设计方法设计多环控制系统的特点。这样做,虽然不利于快速性,但每个控制环本身都是稳定的,对系统的组成和调试工作非常有利。 设计举例: 例题2-1、例题2-2和例题2-3。 *2.6 弱磁控制的直流调速系统 *2.6.1 变压与弱磁的配合控制 当负载要求的调速范围更大时,采用变压和弱磁配合控制的办法,即在基速以下保持磁通为额定值不变,只调节电枢电压,而在基速以上则把电压保持为额定值,减弱磁通升速,这样的配合控制特性示于图2-35。 *2.6.2 非独立控制励磁的调速系统 图2-36是一种已在实践中证明很方便有效的控制系统,称作非独立控制励磁的调速系统。图中的给定电位器是模拟控制系统中常用的给定装置。 电枢电压控制系统仍采用常规的转速、电流双闭环控制,而励磁控制系统也有两个控制环,即电动势外环和励磁电流内环,电动势调节器AER 和励磁电流调节器AFR 一般都采用PI 调节器。 在变压调速范围内,N n n ~0=,e U 小于电动势给定信号* e U ,AER 处于饱和状态,其 输出限幅值*ifm U 使电动机励磁保持额定值不变,完全靠电枢电压的双闭环控制系统来控制转 速。 电枢电压d U 最高升到其额定值dN U 为止,此时*e e U U =,电动势给定信号* e U 设置为相当于dN U E )95.0~9.0(max ≈。当转速再升高时,*e e U U >,使AER 退出饱和状态,其输出 量*if U 开始降低,通过AFR 减弱励磁,系统便自动进入弱磁升速范围。在弱磁升速范围内, 电动势E 值保持不变,采用PI 型的电动势调节器保证了电动势无静差的控制要求。 电动势信号e U 是由电动势运算器AE 接受测量到的电枢电压信号v U 和电流信号i U 后 摘要 电机自动控制系统广泛应用于机械,钢铁,矿山,冶金,化工,石油,纺织,军工等行业。这些行业中绝大部分生产机械都采用电动机作原动机。有效地控制电机,提高其运行性能,对国民经济具有十分重要的现实意义。 20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。尽管近年来直流电动机不断受到交流电动机及其它电动机的挑战,但至今直流电动机仍然是大多数变速运动控制和闭环位置伺服控制首选。因为它具有良好的线性特性,优异的控制性能,高效率等优点。直流调速仍然是目前最可靠,精度最高的调速方法。 本次设计的主要任务就是应用自动控制理论和工程设计的方法对直流调速系统进行设计和控制,设计出能够达到性能指标要求的电力拖动系统的调节器,通过在DJDK-1型电力电子技术及电机控制试验装置上的调试,并应用MATLAB软件对设计的系统进行仿真和校正以达到满足控制指标的目的。 在转速闭环直流调速系统中,只有电流截止负反馈环节对电枢电流加以保护,缺少对电枢电流的精确控制,也就无法充分发挥直流伺服电动机的过载能力,因而也就达不到调速系统的快速起动和制动的效果。通过在转速闭环直流调速系统的基础上增加电流闭环,即按照快速起动和制动的要求,实现对电枢电流的精确控制,实质上是在起动或制动过程的主要阶段,实现一种以电动机最大电磁力矩输出能力进行启动或制动的过程。 一、设计要求 设一个转速、电流双闭环直流调速系统,采用双极式H桥PWM方式驱动,已知电动机参数为: 《运动控制》课程设计题目:转速,电流双闭环可逆直流宽频调速系统设计 系部:自动化系 专业:自动化 班级:自动化1班 学号:11423006 11423025 11423015 姓名:杨力强.丁珊珊.赵楠 指导老师:刘艳 日期:2018年5月26日-2018年6月13日 一、设计目的 应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。 应用计算机仿真技术,通过在MA TLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。 二、系统设计参数 直流电动机控制系统设计参数:< 直流电动机(3> ) 输出功率为:5.5Kw 电枢额定电压220V 电枢额定电流 30A 额定励磁电流1A 额定励磁电压110V 功率因数0.85 电枢电阻0.2欧姆 电枢回路电感100mH 电机机电时间常数1S 电枢允许过载系数=1.5 额定转速 970rpm 直流电动机控制系统设计参数 环境条件: 电网额定电压:380/220V。电网电压波动:10%。 环境温度:-40~+40摄氏度。环境湿度:10~90%. 控制系统性能指标: 电流超调量小于等于5%。 空载起动到额定转速时的转速超调量小于等于30%。 调速范围D=20。 静差率小于等于0.03. 1、设计内容和数据资料 某直流电动机拖动的机械装置系统。 主电动机技术数据为: ,,,电枢回路总电阻,机电时间常数 ,电动势转速比,Ks=40,,Ts=0.0017ms,电流反馈系数,转速反馈系数,试对该系统进行初步设计。2、技术指标要求 电动机能够实现可逆运行。要求静态无静差。动态过渡过程时间,电流超调量,空载起动到额定转速时的转速超调量。 三、主电路方案和控制系统确定 主电路选用直流脉宽调速系统,控制系统选用转速、电流双闭环控制方案。主电路采用25JPF40电力二极管不可控整流,逆变器采用带续流二极管的功率开关管IGBT构成H型双极式控制可逆PWM变换器。其中属于脉宽调速系统特有的部分主要是UPM、逻辑延时环节DLD、全控型绝缘栅双极性晶体管驱动器GD和PWM变换器。系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差, 从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流原理图 课程设计任务书 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:U N=220V,I N=205A,=575r/min , R a=0.1,电枢电路总电阻R=0.2,电枢电路总电感L=7.59mH,电流允许过载倍数,折算到电动机轴的飞轮惯量。 晶闸管整流装置放大倍数,滞后时间常数 电流反馈系数( 转速反馈系数() 滤波时间常数取,。 ;调节器输入电阻R0=40。 设计要求: 稳态指标:无静差; 动态指标:电流超调量;空载起动到额定转速时的转速超调量。 目录 课程设计任务书 (1) 第一章直流双闭环调速系统原理 (3) 1.1系统的组成 (3) 1.2 系统的原理图 (4) 第二章转速、电流双闭环直流调速器的设计 (6) 2.1 电流调节器的设计 (6) 2.2 转速调节器的设计 (13) 第三章系统仿真 (21) 心得体会 (26) 参考文献 (27) 第一章直流双闭环调速系统原理 1.1系统的组成 转速、电流双闭环控制直流调速系统是性能很好、应用最广的直流调速系统。采用PI调节的单个转速闭环调速系统可以在保证系统稳定的前提下实现转速无静差。但是对系统的动态性能要求较高的系统,单闭环系统就难以满足需要了。 为了实现在允许条件下的最快启动,关键是要获得一段使电流保持为最大值的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。所以,我们希望达到的控制:启动过程只有电流负反馈,没有转速负反馈;达到稳态转速后只有转速负反馈,不让电流负反馈发挥作用。故而采用转速和电流两个调节器来组成系统。 为了实现转速和电流两种负反馈分别起作用,可以在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者之间实行嵌套(或称串级)联接,如图1-1所示。把转速调节器的输出当作电流调节器的输入,再把电流调节器的输出去控制电力电子变换器UPE。从闭环结构上看,电流环在里面,称作内环;转速换在外边,称作外环。这就形成了转速、电流双闭环调速系统。 实验二 转速、电流双闭环直流调速系统 一、实验目的 1.了解转速、电流双闭环直流调速系统的组成。 2.掌握双闭环直流调速系统的调试步骤,方法及参数的整定。 3.测定双闭环直流调速系统的静态和动态性能及其指标。 4.了解调节器参数对系统动态性能的影响。 二、实验系统组成及工作原理 双闭环调速系统的特征是系统的电流和转速分别由两个调节器控制,由于调速系统调节的主要参量是转速,故转速环作为主环放在外面,而电流环作为副环放在里面,可以及时抑制电网电压扰动对转速的影响。实际系统的组成如实验图2-1所示。 实验图2-1 转速、电流双闭环直流调速系统 主电路采用三相桥式全控整流电路供电。系统工作时,首先给电动机加上额定励磁,改 变转速给定电压* n U 可方便地调节电动机的转速。速度调节器ASR 、电流调节器ACR 均设有 限幅电路,ASR 的输出*i U 作为ACR 的给定,利用ASR 的输出限幅*im U 起限制起动电流的作 用;ACR 的输出c U 作为触发器TG 的移相控制电压,利用ACR 的输出限幅cm U 起限制αmin 的作用。 当突加给定电压*n U 时,ASR 立即达到饱和输出* im U ,使电动机以限定的最大电流I dm 加速起动,直到电动机转速达到给定转速(即* n n U U )并出现超调,使ASR 退出饱和,最后稳 定运行在给定转速(或略低于给定转速)上。 三、实验设备及仪器 1.主控制屏NMCL-32 2.直流电动机-负载直流发电机-测速发电机组 3. NMCL -18挂箱、NMCL-333挂箱及电阻箱 4.双踪示波器 5.万用表 四、实验内容 1.调整触发单元并确定其起始移相控制角,检查和调整ASR 、ACR ,整定其输出正负限幅值。 2.测定电流反馈系数β和转速反馈系数α,整定过电流保护动作值。 3.研究电流环和转速环的动态特性,将系统调整到可能的最佳状态,画出)(t f I d =和)(t f n =的波形,并估算系统的动态性能指标(包括跟随性能和抗扰性能) 。 4.测定高低速时系统完整的静特性)(d I f n =(包括下垂段特性),并计算在一定调速范围内系统能满足的静态精度。 五、实验步骤及方法 1.多环调速系统调试的基本原则 (1)先部件,后系统。即先将各环节的特性调好,然后才能组成系统。 (2)先开环,后闭环。即先使系统能正常开环运行,然后在确定电流和转速均为负反馈后组成闭环系统。 (3)先内环,后外环。即闭环调试时,先调电流内环,然后再调转速外环。 2.单元部件参数整定和调试 (1)主控制屏开关按实验内容需要设置 (2)触发器整定 将面板上的U blf 端接地,调整锯齿波触发器的方法同实验1。 (3)调节器调零 断开主回路电源开关SW ,给定电压U g 接到零速封锁器DZS 输入端,并将DZS 的输出接到ASR 和ACR 的封锁端。控制系统按开环接线,ASR 、ACR 的反馈回路电容短接,形成低放大系数的比例调节器。 a)ASR 调零 将调节器ASR 的给定及反馈输入端接地,调节ASR 的调零电位器,使ASR 的输出为零。 b)ACR 调零 将调节器ACR 的给定及反馈输入端接地,调节ACR 的调零电位器,使ACR 的输出为零。 (4)调节器输出限幅值整定 a)ASR 输出限幅值整定 ASR 按比例积分调节器接线,将U g 接到ASR 的输入端,当输入U g 为正而且增加时,调节 ASR 负限幅电位器,使ASR 输出为限幅值* im U ,其值一般取为8~6--V 。 b)ACR 输出限幅值整定 整定ACR 限幅值需要考虑负载的情况,留有一定整流电压的余量。ACR 按比例积分调节器接线,将g U 接到ACR 的输入端,用ACR 的输出c U 去控制触发移相,当输入g U 为负且增加时,通过示波器观察到触发移相角α移至οο30~15min =α时的电压即为ACR 限幅值U cm ,可通过ACR 正限幅电位器锁定。 3.电流环调试(电动机不加励磁) (1)电流反馈极性的测定及过电流保护环节整定。 整定时ASR 、ACR 均不接入系统,系统处于开环状态。直接用给定电压g U 作为c U 接到移相触发器GT 以调节控制角α,此时应将电动机主回路中串联的变阻器M R 放在最大值处, 仿真设计报告 转速、电流双闭环直流调速系统的Simulink仿真设计 一、系统设计目的 直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。根据直流电动机的工作原理建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。在理论分析和仿真研究的基础上,设计了一套实验用双闭环直流调速系统。对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。采用MATLAB 软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。 二、系统理论分析 2.1双闭环直流调速系统工作原理 电动机在启动阶段,电动机的实际转速低于给定值,速度调节器的输入端偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器,此时以最大电流给定值使电流调节器输出移相信号直流电压迅速上升,电流也随即增大直到最大给定值,电动机以最大电流恒流加速启动。电动机的最大电流可通过整定速度调节器的输出限幅值来改变。在转速上升到给定转速后,速度调节器输入端的偏差信号减小到近于零,速度调节器和电流调节器退出饱和状态,闭环调节开始起作用。对负载引起的转速波动,速度调节器输入端偏差信号将随时通过速度调节器、电流调节器修正触发器的移相电压,使整流桥输出的直流电压相应变化校正和补偿电动机的转速偏差。另外电流调节器的小时间常数,还能对因电网波动引起的电枢电流的变化进行快速调节,可在电动机转速还未来得及发生改变时,迅速使电流恢 案例转速、电流双闭环直流调速系统 一、概述 现以ZCC1系列晶闸管—电动机直流调速装置(简称ZCC1系列)为例,来阐述晶闸管—电动机直流调速系统分析、调试的一般方法与步骤。该装置的基本性能如下: (1)装置的负荷性质按连续工作制考核。 (2)装置在长期额定负荷下,允许150%额定负荷持续二分钟,200%额定负荷持续10秒钟,其重复周期不少于1小时。 (3)装置在交流进线端的电压为(0.9~1.05)380伏时,保证装置输出端处输出额定电压和额定电流。电网电压下降超过10%范围时输出额定电压同电源电压成正比例下降。 (4)装置在采用转速反馈情况下,调速范围为20∶1,在电动机负载从10%~100%额定电流变化时,转速偏差为最高转速的0.5%(最高转速包括电动机弱磁的转速)。转速反馈元件采用ZYS型永磁直流测速发电机。 (5)装置在采用电动势反馈(电压负反馈、电流正反馈)时,调速范围为10∶1,电流负载从10%~100%变化时,转速偏差小于最高转速的5%(最高转速包括电动机弱磁的转速)。 (6)装置在采用电压反馈情况下,调压范围为20∶1,电流负载从10%~100%变化时,电压偏差小于额定电压的0.5%。 (7)装置给定电源精度,在电源电压下降小于10%以及温度变化小于±10℃时,其精度为1%。 二、系统的组成 1、主电路 ZCC1系列装置主电路采用三相桥式全控整流电路,交流进线电源通过三相整流变压器或者交流进线电抗器接至380V交流电源。为了使电机电枢电流连续并减小电流脉动以改善电动机的发热和换向,在直流侧接有滤波电抗器L。 2、控制系统 ZCC1系列晶闸管直流调速装置的控制系统采用速度(转速)电流双闭环控制系统,其原理方框图如图3-1所示 直流电动机调速系统课程设计 班级:电气0802 姓名:刘志勇 学号: 08140218 目录 第一章:设计内容 (2) 1.1设计内容: (2) 第二章:设计要求 (2) 2.1设计要求 (2) 2.2设计参数: (2) 第三章:双闭环直流调速系统设计 (3) 3.1转速、电流双闭环直流调速系统的成 (3) 3.2系统电路结构 (4) 3.3调节器的设计 (7) 第四章单闭环直流调速系统设计 (14) 4.1闭环系统调速的组成及其静特性 (14) 4.2 稳态参数计算 (16) 第五章相关原理图设计波形图 (19) 5.1.主电路图 (19) 5.2.控制电路图 (20) 第六章设计总结及参考文献 (23) 6.1设计总结 (23) 6.2 参考资料 (23) 1 第一章:设计内容 1.1设计内容: (1)根据给定参数设计转速电流双闭环直流调速系统 (2)根据给定参数设计转速单闭环直流调速系统,使用模拟电路元件实现转速单闭环直流调速系统 第二章:设计要求 2.1设计要求 2.1.1根据设计要求完成双闭环系统的稳态参数设计计算、判断系统的稳定性、绘制系统的稳态结构图 2.1.2直流调速系统的调节器,选择调节器结构、利用伯德图完成系统动态校正、计算系统的稳定余量γ及GM、计算调节器参数、绘系统动态结构图 2.1.3设计采用模拟调节器及MOSFET功率器件实现的转速单闭环调速系统,绘制控制电路及主电路电路图 2.1.4测试单闭环调速系统的PWM驱动信号波形、电压电流波形、转速反馈波形和直流电动机转速及控制电路各单元的相关波形。 2.2设计参数: =1.8Ω 2.2.1电枢电阻R a 电枢电感L =9.76mH、GD2=16.68N·cm2、Tm=35ms a 2 摘要 此设计利用晶闸管、二极管等器件设计了一个转速、电流双闭环直流晶闸管调速系统。该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。并通过Simulink进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性。 关键词:双闭环,晶闸管,转速调节器,电流调节器,Simulink 目录 1设计意义 (3) 2主电路设计 (4) 2.1设计任务 (4) 2.2电路设计及分析 (4) 2.2.1电流调节器 (5) 2.2.2转速调节器 (6) 2.3电路设计及分析 (7) 2.4电流调节器设计 (7) 2.4.1电流环简化 (8) 2.4.2电流调节器设计 (8) 2.4.3电流调节器参数计算 (9) 2.4.4电流调节器的实现 (10) 2.5转速调节器设计 (11) 2.5.1电流环等效传递函数 (11) 2.5.2转速调节器结构选择 (12) 2.5.3转速调节器参数计算 (13) 2.5.4转速调节器的实现 (14) 3系统参数计算和电气图 (15) 3.1电流调节器参数计算 (15) 3.2转速调节器参数计算 (15) 3.3电气原理图 (16) 4系统仿真 (18) 5小结体会 (20) 参考文献 (21) 转速电流双闭环直流调速系统仿真 摘要:本设计主要研究了直流调速转速电流双闭环控制系统以及对MATLAB软件的使用。系统模型由晶闸管-直流电动机组成的主电路和转速电流调节器组成的控制电路两部分组成。主电路采用三相可控晶闸管整流电路整流,用PI调节器控制,通过改变直流电动机的电枢电压从而进行调压调速。控制电路设置两个PI调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者实行嵌套连接,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE,形成转速电流双闭环直流调速系统。在Simulink中建立仿真模型,设置各个模块的参数,仿真算法和仿真时间,运行得出仿真模型的波形图。通过对波形图的分析,说明直流调速转速电流双闭环控制系统具有良好的静态和动态特性。 关键词:双闭环直流调速系统,MATLAB/SIMULINK仿真,ASR,ACR。 课程概述:直流调速是现代电力拖动自动控制系统中发展较早的技术。随着交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。但如果对系统的动态性能要求较高,如要求快速起制动、突加负载动态速降时,单闭环系统就难以满足。这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流或转矩。在单闭环系统中,只有电流截至负反馈环节是专门用来控制电流的,但它只是在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。实际工作中,在电机最大电流受限的条件下,充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流转矩为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。实际上,由于主电路电感的作用,电流不能突跳,为了实现在允许条件下最快启动,关键是要获得一段使电流保持为最大值的恒流过程,按照反馈控制规律,电流负反馈就能得到近似的恒流过程。问题是希望在启动过程中只有电流负反馈,而不能让它和转速负反馈同时加到一个调节器的输入端,到达稳态转速后,又希望只要转速负反馈,不要电流负反馈发挥主作用,因此需采用双闭环直流调速系统。这样就能做到既存在转速和电流两种负反馈作用又能使它们作用在不同的阶段。其次并基于双闭环的电气原理图的SIMULINK的仿真,分析了直流调速系统的动态抗干扰性能。采用工程设计方法 电力拖动自控系统课程设 计报告 题目转速电流双闭环直流调速系统设 计 学院:电子与电气工程学院 年级专业:2012级电气工程及其自动化(电力传动方向)姓名: 学号: 指导教师: 成绩: 电力拖动自动控制系统综合课程设计 设计任务书 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:kW 5.7P N =,V 400U N =,A 8.21I N = ,min /r 3000N =n , W 716.0R a =,电枢回路总电阻Ω=75.1R ,电枢电路总电感mH 60L =,电流允许 过载倍数5.1=λ,折算到电动机轴的飞轮惯量22m N 64.2GD ?=。励磁电流为1.77A 。 晶闸管整流装置放大倍数40K s =,滞后时间常数s 0017.0T s = 电流反馈系数)I 5.1/V 15(A /V 4587.0βN ≈= 电压反馈系数)/V 15(r m in/V 005.0αN n ≈?= 滤波时间常数s 002.0T oi =,s 01.0T on = V 15U U U cm *im *nm ===;调节器输入电阻Ω=K 40R o 。 设计要求:稳态指标:无静差; 动态指标:电流超调量00i 5≤σ;采用转速微分负反馈使转速超调量等于0。 目 录 1 概述 (1) 1.1问题的提出 ............................................................................................................ 1 1.2解决的问题 ............................................................................................................ 1 1.3实现目标要求设计 . (1) 2 主电路计算 (2) 2.1整流变压器的计算 .............................................................................................. 2 2.2晶闸管及其元件保护选择 (2) 3 直流双闭环调速系统设计 (8) 3.1转速和电流双闭环调速系统的组成 .............................................................. 8 3.2系统静态结构图及性能分析 ............................................................................ 9 3.3系统动态结构图及性能分析 .. (10) 课程设计说明书 课程名称:电力拖动自动控制系统 设计题目:转速电流双闭环直流调速系统 院系: 学生姓名: 学号: 专业班级: 指导教师: 2010年12 月30 日 转速电流双闭环直流调速控制系统 摘要:此设计利用晶闸管、二极管等器件设计了一个转速、电流双闭环直流调速系统。该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。 关键词:双闭环,晶闸管,转速调节器,电流调节器 目录 第一章.直流拖动控制系统总体设计 (1) 一、直流调速系统拖动方案的对比 (1) 二、直流调速系统控制方案的确定 (2) 三、直流电动机的调速方式 (2) 第二章.主电路参数计算和保护环节设计 (3) 一、整流变压器额定参数的计算 (3) 二、主电路器件的计算与选择 (3) 三、主电路保护环节的设计与计算 (3) 四、电抗器参数计算与选择 (4) 第三章.调速系统控制单元的确定和调整 (4) 一、检测环节 (4) 二、调节器的选择与调整 (5) 三、系统的给定电源 (11) 第四章.触发电路的设计 (12) 第五章.调速系统动态参数的工程计 (12) 心得体会 (12) 参考文献 (13) 附件.课程设计要求 (13) 第2章 转速、电流双闭环直流调速系统 和调节器的工程设计方法 2.1 转速、电流双闭环直流调速系统及其静特性 采用PI 调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,单闭环系统就难以满足需要,这主要是因为在单闭环系统中不能控制电流和转矩的动态过程。电流截止负反馈环节是专门用来控制电流的,并不能很理想地控制电流的动态波形,图2-1a)。 在起动过程中,始终保持电流(转矩)为允许的最大值,使电力拖动系统以最大的加速度起动,到达稳态转速时,立即让电流降下来,使转矩马上与负载相平衡,从而转入稳态运行。这样的理想起动过程波形示于图2-1b 。 为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值dm I 的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。应该在起动过程中只有电流负反馈,没有转速负反馈,达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。 2.1.1 转速、电流双闭环直流调速系统的组成 系统中设置两个调节器,分别调节转速和电流,如图2-2所示。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE 。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。这就形成了转速、电流双闭环调速系统。 转速和电流两个调节器一般都采用PI 调节器,图2-3。两个调节器的输出都是带限幅 + TG n ASR ACR U *n + - U n U i U * i + - U c TA M + - U d I d UPE - M T 图2-2 转速、电流双闭环直流调速系统结构 ASR —转速调节器 ACR —电流调节器 TG —测速发电机 TA —电流互感器 UPE —电力电子变换器 内外 n i 运动控制课程设计 专业:自动化 班级: 姓名: 学号: 指导教师: 2015年07月 16 日 转速、电流双闭环直流调速系统设计 1.设计目的 一般来说,我们总希望在最大电流受限制的情况下,尽量发挥直流电动机的过载能力,使电力拖动控制系统以尽可能大的加速度起动,达到稳态转速后,电流应快速下降,保证输出转矩与负载转矩平衡,进入稳定运行状态。为实现在约束条件快速起动,关键是要有一个使电流保持在最大值的恒流过程。根据反馈控制规律,要控制某个量,只要引入这个量的负反馈。因此采用电流负反馈控制过程,起动过程中,电动机转速快速上升,而要保持电流恒定,只需电流负反馈;稳定运行过程中,要求转矩保持平衡,需使转速保持恒定,应以转速负反馈为主。故采用转速、电流双闭环控制系统。 2.设计任务 某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路;基本数据如下: (1)直流电动机:220V、160A、1460r/min、Ce=0.129Vmin/r,允许过载倍数λ=1.5; (2)晶闸管装置放大系数:K s=40; (3)电枢回路总电阻:R=0.5Ω; (4)时间常数:T l=0.03s,T m=0.19s; (5)电流反馈系数:β=0.042V/A; (6)转速反馈系数:α=0.0068Vmin/r; 试按工程设计方法设计双闭环系统的电流调节器和转速调节器,并用Simulink建立系统模型,给出仿真结果。 3.设计要求 根据电力拖动自动控制理论,按工程设计方法设计双闭环调速系统: (1)设计电流调节器的结构和参数,将电流环校正成典型I型系统; (2)分析电流环不同参数下的仿真曲线; (3)在简化电流环的条件下,设计速度调节器的结构和参数,将速度环校正成典型II型系统; (4)分析转速环空载起动、满载起动、抗扰波形图仿真曲线 (5)进行Simulink仿真,验证设计的有效性。 4.设计内容 4.1双闭环直流调速系统的组成 《电力拖动自动控制系统》课程设计 设计报告 题目:转速电流双闭环直流调速系统设计 学院信息科学与工程学院 专业自动化 班级0603 学号 2 学生姓名杨明 指导老师潘炼 日期2009/7/2 转速电流双闭环直流调速系统设计 1. 设计题目 转速、电流双闭环直流调速系统设计 2. 设计任务 已知某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: 1)直流电动机:160V、120A、1000r/min、C e=0.136Vmin/r,允许过载倍数λ=1.4 2)晶闸管装置放大系数:K s=30 3)电枢回路总电阻:R=0.4Ω 4)时间常数:T l=0.023s,T m=0.2s,转速滤波环节时间常数T on取0.01s 5)电压调节器和电流调节器的给定电压均为10V 试按工程设计方法设计双闭环系统的电流调节器和转速调节器,并用Simulink建立系统模型,给出仿真结果。 系统要求: 1)稳态指标:无静差 2)动态指标:电流超调量σi ≤5%;空载起动到额定转速时超调量σn ≤10% 3. 设计要求 根据电力拖动自动控制理论,按工程设计方法设计双闭环调速系统的步骤如下: 1)设计电流调节器的结构和参数,将电流环校正成典型I型系统; 2)在简化电流环的条件下,设计速度调节器的结构和参数,将速度环校正成典型II型系统; 3)进行Simulink仿真,验证设计的有效性。 4.设计内容 1)设计思路: 带转速负反馈的单闭环系统,由于它能够随着负载的变化而相应的改变电枢电压,以补偿电枢回路电阻压降的变化,所以相对开环系统它能够有效的减少稳态速降。 当反馈控制闭环调速系统使用带比例放大器时,它依靠被调量的偏差进行控制的,因此是有静差率的调速系统,而比例积分控制器可使系统在无静差的情况下保持恒速,实现无静差调速。 对电机启动的冲击电流以及电机堵转时的堵转电流,可以用附带电流截止负 第二章双闭环直流调速系统 2-1在转速、电流双闭环调速系统中,若要改变电动机的转速,应调节什么参数?改变转速调节器的放大倍数行不行?改变电力电子变换器的放大倍数行不行?改变转速反馈系数行不行?若要改变电动机的堵转电流,应调节系统中的什么参数? 答:改变电机的转速需要调节转速给定信号Un※;改变转速调节器的放大倍数不行,改变电力电子变换器的放大倍数不行。若要改变电机的堵转电流需要改变ASR的限幅值。 2-2 (1 (2 (1 (2 (3 (4 2-3是多少? 答:=βId=Ui,Uc=U d0 2-4如果转速、电流双闭环调速系统的转速调节器不是PI调节器,而是比例调节器,对系统的静、动态性能会有什么影响? 答:若采用比例调节器可利用提高放大系数的办法使稳态误差减小即提高稳态精度,但还是有静差的系统,但放大倍数太大很有可能使系统不稳定。 2-5在转速、电流双闭环系统中,采用PI调节器,当系统带额定负载运行时,转速反馈线突然断线,系统重新进入稳态后,电流调节器的输入偏差电压△Ui是否为0,为什么? 答:反馈线未断之前,Id=In,令n=n1,当转速反馈断线,ASR迅速进入饱和,Un※=Un※max,Uc↑,Id↑至Idm,Te>T l,n↑,Id↓,△Ui出现,Id↑至Idm,n↑,Id↓,此过程重复进行直到ACR饱和,n↑,Id↓,当Id=In,系统重新进入稳态,此时的速度n2>n1,电流给定为Un※max=Idmaxβ>电流反馈信号Un=Inβ,偏差△Ui不为0。 2-6在转速、电流双闭环系统中,转速给定信号Un※未改变,若增大转速反馈系数α,系统稳定后转速反馈电压Un是增加还是减少还是不变?为什么? 答:Un不变,因为PI调节器在稳态时无静差,即:Un※=Un,Un※未改变,则,Un也不变。 2-7 Unm*试求:(1 (2 解:(1 α=Unm* (2 2-8Uim=8V (1)Ui (2)Uc 解:(1 电流为 电流为 (2)Uc增加。 2-9在双闭环直流调速系统中,电动机拖动恒转矩负载在额定工作点正常运行,现因某种原因电动机励磁下降一半,系统工作情况将会如何变化?(λ=1.5) 答:设突发状况之前的磁通为?1,令此时的磁通为?2,之前的电磁力矩为Te1,此刻的电磁力矩为Te2,负载转矩恒为T l,电机励磁下降一半,则?2=0.5?1,Te2=Cm(?2)Id=0.5Te1<T l,n↓,Id↑甚至到Idm,Te2=Cm(?2)Idm=0.75Te1<T l,n会一直下降到0。 《电力拖动与运动控制系统》课程设计------ 转速电流双闭环直流调速 系统的设计 学院: 年级: 班级: 姓名: 座号: 学号: 指导老师: 目录 一设计任务 (3) 二设计要求 (3) 三.设计的基本思路: (3) 四.设计过程 (4) 1确定转速、电流反馈系数 (4) 2.电流环的设计 (5) 3.转速环的设计 (6) 五.硬件电路图设计 (9) 1 系统主电路图绘制 (9) 2 系统触发电路图 (9) 3 电流环电路 (12) 4.转速环电路: (13) 4.控制电路总体电路图 (14) 六.心得体会: (15) 七参考资料 (15) 一 设计任务 设计一转速、电流双闭环直流调速系统,采用他励直流电动机、晶闸管三相全控桥式整流电路,其数据如下: 直流电动机:PN=60KW ,UN=220V ,IN=305A ,Nn=1000r/min ; 晶闸管整流触发装置的放大系数 Ks=30 电磁时间常数:T1=0.012S; 机电时间常数:Tm=0.12s; 反馈滤波时间常数:Toi=0.0025s,Ton=0.014s; 额定转速时的给定电压:Unm=10V; 调节器饱和输出电压:10V ; 系统调速围:D=20; 系统的静、动态性能指标:无静差,电流超调量5%i δ≤,启动到额定转速时的超调量10%δ≤ 二 设计要求 1.确定转速、电流反馈系数; 2.设计电流调节器; 3.用min r M 准则设计转速环,确定转速调节器的结构和参数; 4.计算最低速启动时的转速超调量; 5.绘制系统线路图(主电路、触发电路、控制电路)。 三.设计的基本思路: 转速,电流双闭环调速系统属于多环控制系统。对电流双闭环调速系统而言,先从环(即电流环)出发,根据电流控制要求,确定把电流环校正为那种典型系统。按照调节对象选择调节器及其参数。设计完电流环环节之后,把它等效成一个小 双闭环控制的直流调速系统简介 1.1V—M系统简介 晶闸管—电动机调速系统(简称V—M系统),其简单原理图如图1。图中VT是晶闸管的可控整流器,它可以是单相、三相或更多相数,半波、全波、半控、全控等类型。 优点:通过调节触发装置GT的控制电压来移动触发脉冲的相位,即可改变整流电压从而实现平滑调速。 缺点: 1.由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。 2.元件对过电压、过电流以及过高的du/dt和di/dt都十分敏感,其中任一指标超过允许值都可能在很短时间内损坏元件。 因此必须有可靠的保护装置和符合要求的散热条件,而且在选择元件时还应有足够的余量。 图1 V—M系统 1.2转速控制的要求和调速指标 任何一台需要控制转速的设备,其生产工艺对调速性能都有一定的要求。归纳起来,对于调速系统的转速控制要求有以下三个方面: 1)调速——在一定的最高转速和最低转速范围内,分档地(有级)或平滑地(无级)调节转速; 2)稳速——以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波动,以确保产品质量; 3)加、减速——频繁起、制动的设备要求加、减速尽量快,以提高生产率;不宜经受剧烈速度变化的机械则要求起﹑制动尽量平稳。 1.3 直流调速系统的性能指标 根据各类典型生产机械对调速系统提出的要求,一般可以概括为静态和动态调速指标。静态调速指标要求电力传动自动控制系统能在最高转速和最低转速范围内调节转速,并且要求在不同转速下工作时,速度稳定;动态调速指标要求系统启动、制动快而平稳,并且具有良好的抗扰动能力。抗扰动性是指系统稳定在 某一转速上运行时,应尽量不受负载变化以及电源电压波动等因素的影响[1,6]。 一、静态性能指标 1).调速范围 生产机械要求电动机在额定负载运行时,提供的最高转速m ax n 与最低转速m in n 之比,称为调速范围,用符号D 表示 m in m ax n n D = (2—2) 2).静差率 静差率是用来表示负载转矩变化时,转速变化的程度,用系数s 来表示。具体是指电动机稳定工作时,在一条机械特性线上,电动机的负载由理想空载增加到额定值时,对应的转速降落 ed n ?与理想空载转速 n 之比,用百分数表示为 %100%1000 00?-=??= n n n n n s ed ed (2—3) 显然,机械特性硬度越大,机械特性硬度越大,ed n ?越小,静差率就越小,转速 的稳定度就越高。 然而静差率和机械特性硬度又是有区别的。两条相互平行的直线性机械特性的静差率是不同的。对于图2—1中的线1和线2,它们有相同的转速降落1ed n ?=2 ed n ?, 但由于 01 02n n <,因此12s s >。这表明平行机械特性低速时静差率较大,转速的相对 稳定性就越差。在1000r/min 时降落10r/min ,只占1%;在100r/min 时也降落10r/min ,就占10%;如果 n 只有10r/min ,再降落10r/min 时,电动机就停止转动,转速全都 降落完了。 由图2—1可见,对一个调速系统来说,如果能满足最低转速运行的静差率s ,那么,其它转速的静差率也必然都能满足。 直流电机的转速电流双闭 环控制 The final edition was revised on December 14th, 2020. 直流电机的转速电流双闭环控制 摘要:本设计主要采用模拟电路实现直流电机控制的整流电源,转速调PI调节器,电流PI调节器的设计。来实现对电机转速的控制,包括快速起动、恒速运行、堵转截止三大目标。该设计的主要电路均采用模拟电路实现,电流环的PI 调节器用于保证快速起动,即保证电机起动时以最大负载电流起动,也即实现以最大加速度实现。而转速调节器则用于在运行时实现转速恒定,保证带负载的能力。两个PI调节器都采用集成运放实现。其主要优点是克服传统意义上单环控制只能满足一方面的要求的缺陷。 关键词:电流环;转速环;PI调节器 The Rotate Speed and Current Double Closed Loop Feedback Control for DC Motor Abstract: The major tasks of this design is utilizing simulating circuits to produce the rectifiering power source ,current PI regulator and rotate speed PI regulator for the DC major object of this desigen is making the DC motor started rapidly,rotating making the DC motor started rapidly with the largest load is the same to starting rapidly with the largest ,The rotate speed PI regulator make the DC mortor retated stably to any the change of the load .Both of the PI regulators use the integrated amplifier operator to accomplish the priority of this design are overcoming the defect of traditional single feedback loop. Key word: current feedback loop; rotate speed feedback loop;PI regulator ******************************************************************** *********** 电流转速双闭环直流调速系统的工作原理 论文 姓名:范洪峰 班级:电气111 学号:11055103 2014年9月18日 ******************************************************************** *********** ******************************************************************** *********** 电流转速双闭环直流调速系统的工作原理 范洪峰 (山东工商学院信息与电子工程学院,山东烟台,264005) 摘要:转速闭环调速系统可以在保证系统稳定的前提下实现转速的无静差,但是对动态性能要求较高的系统,转速闭环系统很难对电流(转矩)进行控制。电机经常工作在启动、制动、反转等过渡过程中,启动和制动过程的时间在很大程度上决定了电机的效率。如何缩短这一部分时间,以充分发挥电机的效率,是转速控制系统首先要解决的问题。直流电动机调速控制器选用了转速、电流双闭环调速控制电路。在设计中调速系统的主电路采用了三相全控桥整流电路来供电。控制系统中设置两个调节器,分别调节转速和电流,二者之间实行嵌套联接。 关键词:双闭环;转速调节器;电流调节器 Current Speed Working Principle of Doubleclosed-loop dc speed Regulating System Fan Hongfeng (Shandong province industrial and commercial college of information and electronic engineering institute, Yantai, Shandong province, 264005) Abstract: the speed closed-loop speed control system can guarantee the stability of the system under the premise of implementation speed astatic, but system ofhigh dynamic performance requirements, it is difficult to the current (torque) of theclosed-loop control. Motor often work in the process of starting, braking and reverse transition, in the process of starting and braking time to a great exten t, determines the efficiency of the motor. How to shorten this part time, in order to give full play to the efficiency of ******************************************************************** ***********转速电流双闭环直流调速系统实训设计说明
转速电流双闭环可逆直流调速系统仿真与设计方案
转速电流双闭环直流调速系统 课程设计
实验二转速、电流双闭环直流调速系统
电流转速双闭环直流调速系统matlab仿真实验
案例转速电流双闭环直流调速系统
直流电动机转速电流双闭环调速系统设计
双闭环(电流环、转速环)调速系统
转速电流双闭环直流调速系统仿真设计
转速电流双闭环直流调速系统设计
转速电流双闭环直流调速系统
传动教材第2章转速电流双闭环直流调速系统和调节器的工程设计方法
转速、电流双闭环直流调速系统设计
转速电流双闭环直流调速系统设计
电力拖动自动控制系统第二章习题答案 (2)
转速电流双闭环直流调速系统的设计说明
转速电流双闭环调速系统
直流电机的转速电流双闭环控制
电流转速双闭环直流调速系统的工作原理