GPS拟合高程精度分析
随着全球定位系统(GPS)技术的成熟和仪器价格的大幅下降,该技术在测绘方面已普及。众所周知,全球定位系统(GPS)测定平面位置能达到很高的精度,但其测定的高程精度,由于受到高程异常的制约,尚有许多问题需要研究,以便充分发挥全球定位系统(GPS)技术的优越性。
GPS测定的是从地面到WGS-84椭球的大地高H,而我国采用的是正常高h,两者存在一个差
值,即高程异常,而高程异常与勘探区的地形、地层结构等因素有关。
本文依据六个煤田勘探区的实测资料,对拟合的GPS高程在平地、丘陵、山地所达到的精度进行分析,并提出应用范围和可能提高精度的浅见,供研究探讨。
1GPS高程异常的求解
1.1勘探区GPS网概况
勘探区GPS网施测于04-06年,采用Trimble5700双频GPS接收机,依据01《
全球定位系统(GPS)测量规范》,按D、E级布网,各区概况如表1。外业解算出的基线,经过同步环和异步环及复测基线检验,其误差,在限差1/3以内达
80%,其余在1/2以内,证明精度是可靠的。
1.2GPS高程异常及变化量求解
GPS高程异常,大地高H,正常高h,它们之间的
关系为
ξ=H-h(1)
H由GPS测量求得,网中每个点均可获得,h由
水准或者三角高程测得。依据公式(1)求出高程异常
值。
Δξ=ξ-ξi
(2)
其中:ξi参考点高程异常。
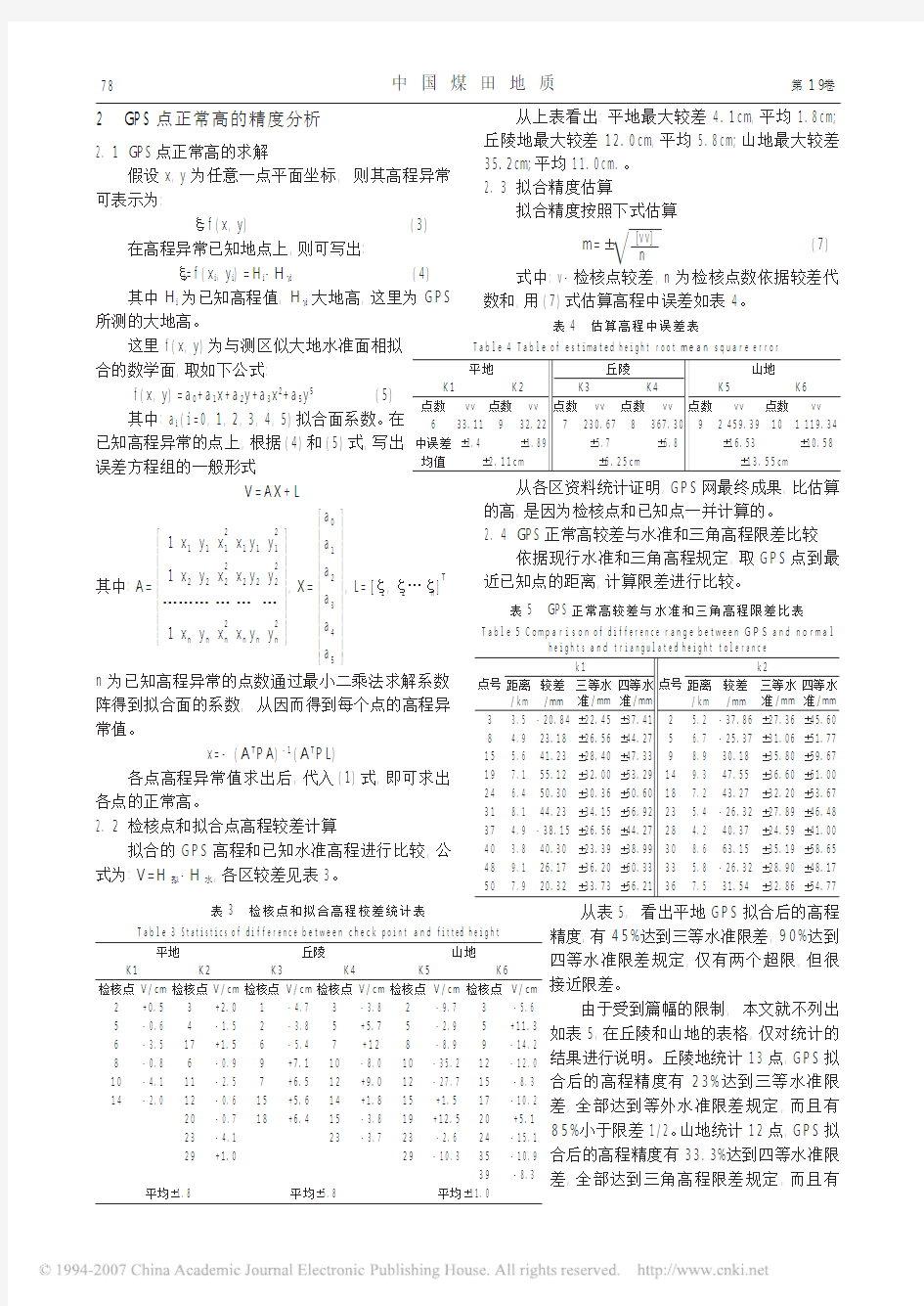
依据(2)式,相对中部一点(参考点)计算的高程异常变化量见表2。
经过数据统计分析,平地第四纪覆盖区,似大地
水准面比较平缓,其变化幅度每公里4cm左右;丘陵
区特别是梯田底部与丘陵的上部,似大地水准面有曲率显示,其变化幅度每公里7cm左右;在山区,可
能受地貌相关性影响,似大地水准面变化较大,其变化幅度每公里10cm左右。
从六个勘探区高程异常变化趋势看,东西方向大,南北方向小。
测区号参考
点高程异常变化量/cm234567891011121314
K1119.115.312.68.14.018.716.513.811.69.36.85.42.9
K2115.713.210.47.85.018.71.714.213.010.78.44.92.3K3119.915.010.67.22.02.612.18.93.91.2
K4120.417.011.37.32.116.516.412.55.22.4
K5119.812.05.80.719.119.25.20.5
K6132.325.318.61.830.13.413.11.4
表2
高程异常变量统计表
Table2Heightanomalyvariablesstatistics勘探区编号地形类别面积/km2相对高差/mGPS点数
联测水准点数三等
四等
K1平地13001062170K2平地9502551410K3丘陵7002904547K4丘陵6002804456K5山地8506804935K6
山地
800
1030
54
4
6
表1各区概况统计表
Table1Statisticsofeacharea'sgeneralsituation
作者简介:雒养社(1963—),男,陕西户县人,高级工程师,1987年毕
业于西安矿业学院,现从事煤田地质测绘工作。
收稿日期:2007-03-12责任编辑:孙常长
GPS拟合高程精度分析
雒养社1,马超1,牛宝才2,李书银3
(1.河南中煤测绘公司,河南郑州450052;2.郑煤集团地测处,河南新密452370;3.渑池县国土资源局,河南渑池472400)
摘
要:GPS测定的是从地面到WGS-84椭球的大地高,与我国采用的正常高之间存在一个差值,即高程异常,高程
异常与勘探区的地形、地层结构等因素有关。六个煤田勘探区的实测资料表明,GPS正常高的平均较差:平地1.8cm;丘陵5.8cm;山地11.0cm。从各区统计资料看,GPS网测量精度,比估算的高。通过平地GPS正常高较差与三角高程限差的比较,拟合后的高程精度,有45%达到三等水准限差,90%达到四等水准限差规定。关键词:GPS高程异常;正常高;三角高程限差;测量精度中图分类号:P25
文献标识码:A
文章编号:1004-9177(2007)03-0077-03
中国煤田地质
COALGEOLOGYOFCHINA
Vol.19No.3Jun.2007
第19卷3期2007年6月
第19卷
中国煤田地质
2GPS点正常高的精度分析
2.1GPS点正常高的求解
假设x,y为任意一点平面坐标,则其高程异常
可表示为:
ξ=f(x,y)
(3)
在高程异常已知地点上,则可写出:
ξi=f(xi,yi)=Hi-Hγi
(4)其中Hi为已知高程值,Hγi大地高,这里为GPS所测的大地高。
这里f(x,y)为与测区似大地水准面相拟合的数学面,取如下公式:
f(x,y)=a0+a1x+a2y+a3x2+a5y5
(5)其中:ai(i=0,1,2,3,4,5)拟合面系数。在已知高程异常的点上,根据(4)和(5)式,写出误差方程组的一般形式
V=AX+L
其中:A=
1x1y1x12x1y1y12
1x2y2x22
x2y2y22
………………
1xnynxn2
xnynyn
2
!
""""""""""""""""#
$%%%%%%%%%%%%%%%%&
,X=
a0
a1a2a3a4a5
!"""""""""""""""""""""""#
$%%%%%%%%%%%%%%%%%%%%%%%&
,L=[ζ1,ζ2…ζn]
T
n为已知高程异常的点数通过最小二乘法求解系数
阵得到拟合面的系数,从因而得到每个点的高程异常值。
x=-(AT
PA)-1
(AT
PL)
各点高程异常值求出后,代入(1)式,即可求出各点的正常高。
2.2检核点和拟合点高程较差计算
拟合的GPS高程和已知水准高程进行比较,公式为:V=H拟-H水,各区较差见表3。
从上表看出:平地最大较差4.1cm,平均1.8cm;丘陵地最大较差12.0cm,平均5.8cm;山地最大较差
35.2cm;平均11.0cm.。2.3拟合精度估算
拟合精度按照下式估算
m=±[vv]
n
’
(7)
式中:v-检核点较差,n为检核点数依据较差代数和,用(7)式估算高程中误差如表4。
从各区资料统计证明,GPS网最终成果,比估算
的高,是因为检核点和已知点一并计算的。
2.4GPS正常高较差与水准和三角高程限差比较
依据现行水准和三角高程规定,取GPS点到最
近已知点的距离,计算限差进行比较。
从表5,看出平地GPS拟合后的高程精度,有45%达到三等水准限差,90%达到四等水准限差规定,仅有两个超限,但很接近限差。
由于受到篇幅的限制,本文就不列出如表5,在丘陵和山地的表格,仅对统计的结果进行说明。丘陵地统计13点,GPS拟合后的高程精度有23%达到三等水准限差,全部达到等外水准限差规定,而且有85%小于限差1/2。
山地统计12点,GPS拟合后的高程精度有33.3%达到四等水准限差,全部达到三角高程限差规定,而且有
点号k1
点号k2距离/km较差
/mm
三等水准/mm四等水准/mm距离/km
较差
/mm
三等水准/mm四等水
准/mm
33.5-20.84±22.45±37.41
25.2-37.86±27.36±45.6084.923.18±26.56±44.2756.7-25.37±31.06±51.77155.641.23±28.40±47.33
9
8.930.18±35.80±59.67197.155.12±32.00±53.29149.347.55±36.60±61.00246.450.30±
30.36±50.60187.243.27±32.20±53.67318.144.23±34.15±56.92235.4-26.32±27.89±46.48
374.9-38.15±26.56±44.2728
4.240.37±24.59±41.00403.840.30±23.39±38.99308.663.15±35.19±58.65489.126.17±
36.20±60.33335.8-26.32±28.90±48.17
50
7.9
20.32±
33.73±56.21367.5
31.54±32.86±54.77
表5
GPS正常高较差与水准和三角高程限差比表
Table5ComparisonofdifferencerangebetweenGPSandnormal
heightsandtriangulatedheighttolerance
平地
丘陵
山地
K1K2
K3
K4
K5
K6
点数
vv点数
vv
点数
vv
点数
vv
点数
vv
点数
vv633.11
932.227230.678367.3092459.39101119.34中误差±2.4
±1.89
±5.7
±6.8
±16.53±10.58
均值
±2.11cm±6.25cm
±13.55cm
表4
估算高程中误差表
Table4Tableofestimatedheightrootmeansquareerror
平地
丘陵
山地
K1K2K3K4K5K6
检核点V/cm检核点V/cm检核点V/cm检核点V/cm检核点V/cm检核点V/cm
2+0.53+2.01-4.73-3.82-9.73-5.65-0.64-1.52-3.85+5.75-2.95+11.36-3.517+1.56-5.47+128-8.99-14.28-0.86-0.99+7.110-8.010-35.212-12.010-4.111-2.57+6.512+9.012-27.715-8.314
-2.0
12-0.615+5.614+1.815+1.517-10.220-0.718
+6.4
15-3.819+12.520+5.123-4.123
-3.7
23-2.624-15.129
+1.0
29
-10.3
35-10.939
-8.3
平均±1.8
平均±5.8
平均±11.0
表3
检核点和拟合高程校差统计表
Table3Statisticsofdifferencebetweencheckpointandfittedheight78
3期
根据以上的讨论,笔者在一援外煤田勘查项目中进行了实践,利用PDA(带GPS模块)嵌入式开发方法开发了动态坐标校正程序,其工作方法是每次在驻地去往测区的路上,到固定的几个已知点进行坐标纠正,计算出每次开机的参数,利用动态参数进行测量,达到了较好的精度。参考文献:
[1]徐绍铨,张华海,等.GPS测量原理及应用[M].武汉:武汉测绘科技大学出版社,1998:25-27.
[3]李洪涛,GPS应用程序设计[M].北京:科学出版社,2000:15-18.[4]王广运.全球导航定位系统的进展[J].科学进展,1987,(6).[5]王广运,刘烈昭.GPS在测地上的应用[J].导航,1992,(2).[6]王广运,李洪涛.准载波相位差分GPS测量[J].导航,1997,(4).[7]赵廷安,田雪丰.矿区GPS高程拟合精度和可靠性研究[J].中国煤田地质,2005,17(3):59-60.
[8]赵征兵,张耘娟,赵卫常.GPS技术在煤矿区域测量控制网中的应用[J].中国煤田地质,2003,15(3).
[9]丁海鹏.手持GPS坐标系统转换参数求解方法的探讨[J].中国煤田地质,2003,15(3):73-74.
PortableGPSPrecisionImprovingThroughDynamicCoordinateCorrectionDingHaipeng1,WangJingli2
(1.NortheastChinaBureauofCoalGeologicalExploration,Shenyang,Liaoning110011;
2.ShenyangUniversityofArchitecture,Shenyang,Liaoning110011)
Abstract:ExperimentationindicatedthatexternalaccordantpositioningaccuracyofsomeportableGPSisrathertoolow.Especiallydifferencebetweentwicesurveyingofasamepointisusuallybeyondnominalaccuracy,thusunexpectederrorwillbeinboreholepositioningandsmallscalegeologicalmapping.Inexperiments,externalaccordantaccuracyofportableGPSisobviouslypoorerthaninternalaccordantaccuracy.Errorsoftheformersometimescanbeabout30mashigh,fluctuatingandlessrandomness;whiletherelativeerrorofthelatergenerally3-5m.Adynamiccoordinatecorrectionmethodhasputforwardbasedonabovementionedfeatures.Thatisineverysurveyingmusttakeseveralgivenpointsascorrectingpointandmakerepeatingobservations,thencarryoutcoordinatecorrectionthroughcorrespondingparametercalculationincoordinatetransformation,therebytoimprovecoordinatecoincidencebetweenportableGPSandmapcoordinates.
Keywords:portableGPS;externalaccordantaccuracy;internalaccordantaccuracy;coordinatecorrectionmethod
雒养社,等:GPS拟合高程精度分析75%小于限差1/3。
3结语
①勘探区GPS网,采用等级水准联测部分点,
对GPS网拟合求解正常高,高程中误差,平地±
2.11cm,丘陵地±6.25cm,山地±13.55cm。依据现行规
范衡量,可分别达到四等水准,等外水准和三角高程限差规定;平地满足0.5m等高距测图,丘陵地和山区满足1m和2m等高距测图,并满足地质勘探工程测量的需要。
②连测GPS点水准路线,应尽量选择沿网的周
边布设,少数点布设在网的中部,组成结构较强图形,并最好能够包含整个网,使拟合时不外延。
③为了提高GPS正常高精度,应对椭球面的精
化和地貌相关性的研究,在丘陵地和山地,应增加对地形和重力改正。参考文献:
[1]周忠谟.GPS卫星测量原理与应用[M].北京:测绘出版社,2002.[2]伍青云.GPS高程拟合的方式及可靠性分析[J].中国煤田地质,2006,18(3).
[3]赵庭安,田雪丰.矿区GPS高程拟合精度和可靠性研究[J].中国煤田地质,2005,17(3).
PrecisionAnalysisofGPSElevationFittingLuoYangshe1,MaChao1,NiuBaocai2andLiShuyin3
(1.HenanZhongmeiSurveyingandMappingCompany,Zhengzhou,Henan450052;2.GeologicalandSurveyingDivision,Zhengmei
Group,Xinmi,Henan452370;3.MianchiCountyBureauofLandandResources,Mianchi,Henan472400)
Abstract:WhattheGPSmeasuredisgeodeticheightfromsurfacetoWGS-84ellipsoid,thusadifferenceexistedbetweentheGPSheightandChinesenormalheight,namelyheightanomaly.Theheightanomalyisrelatedwithfactorsofexplorationareatopographyandstratastructures.Fieldmeasurementfrom6coalfieldexplorationareasindicatedthataveragedifferencerangebetweenGPSandnormalheightasfollows:flatground1.8cm;hillland5.8cm;mountainland11.0cm.Fromareas'statistics,surveyprecisionofGPSnetworkishigherthanestimated.ComparingflatlanddifferencerangebetweenGPSandnormalheightsandtriangulatedheighttolerance,45%fittedheightaccuracyaccordwith3rdclasslevelingtolerance,90%4thclass.Keywords:GPSheightanomaly;normalheight;triangulatedheighttolerance;surveyprecision
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
(上接第76页)
79
GPS高程测量的精度分析
GPS高程测量的精度分析 介绍了GPS在市政工程高程测量中的应用,并揭示了造成实践应用不广泛的主要原因—测量精度。进而从GPS卫星、卫星信号的传播过程和地面接收设备以及地面高程的转化四个方面分析了GPS高程测量的精度问题。 标签:市政工程高程测量GPS信号接收机测量精度 一、引言 在工程测量中,高程测量的精度问题一直被测绘学界的工作者们广泛关注。水准测量的精度较高,但是测量工作量太大、测量速度较慢。相较于水准测量而言,GPS测量高程在效率上有很大的提高。理论与试验研究表明,如果在测量时加上一些特定的措施,GPS的高程测量精度可以达到三、四等水准测量的要求。近年来,随着RTK技术的广泛应用,尤其是多基站连续运行卫星定位服务综合系统在各城市的相继建立,高程测量方法得到了有效扩展,作业效率大大提高,但由于高程异常变化复杂,所以,GPS高程的精度普遍不高,分析影响GPS测量精度的影响因素,提高GPS的测量精度有重要的实践意义。 二、GPS高程测量的影响因素分析 1.与卫星相关的因素。卫星是GPS测量的信息发出点,卫星的分布、数量、稳定性对GPS测量结果的稳定性和精确度影响很大。 (1)卫星的个数及稳定程度。在解算整周模糊度时,至少需要有5颗公共卫星。星数越多,解算模糊度的速度越快、越可靠。当周围高层建筑物密集且有大树时,公共卫星数如果少于5颗,就很难得到固定解。当降低卫星的截止高度角时,公共卫星数将增加,但将使采集的数据含有较低的信噪比,使GPS接收机解算模糊度的时间延长,且观测精度较差,很难满足要求;当周围只是一侧或部分遮挡,此时的卫星个数需根据实际情况而定,如果卫星正好在遮挡物的一侧,此时,可能导致卫星数少于5颗,或者卫星数时而增加,时而减少。这样就会造成测回间的数据精度不稳定;当周围较空矿时,一般都能达5颗或者5颗以上,且卫星个数固定,此时采集的数据精度也比较稳定,但不排除个例。 (2)卫星分布情况。卫星分布用PDOP值(位置精度强弱度,为玮度、经度和高程等误差平方和的平方根)来衡量。PDOP值越小,说明卫星的分布越好,定位精度越高。一般规定,PDOP值应小于6。 2.与卫星信号传播相关的因素。卫星信号要经由大气空间传播到GPS数据接收器上来,在传播过程中,信号可能受到大气层的影响而发生波动,这就会对GPS接收到的数据造成影响,进而影响解算结果,影响测量的精度。 (1)对流层延迟。对流层延迟是指电磁波信号通过高度在50km以下的未
GPS水准高程拟合报告
GPS水准高程拟合报告 实验目的: 1掌握GPS水准高程拟合的基本原理,了解高精度GPS水准的研究意义; 2能够利用Matlab编程实现几何内插法拟合GPS水准高程; 实验内容: 利用Matlab编程实现几何内插法拟合GPS水准高程,并作内插结果分析 实验原理: 1大地水准面,参考椭球面,正高,大地高之间的几何关系 A 正高的定义是:由地面点沿通过该点的铅垂线到大地水准面的距离。一般用符号Hg表示。 B 大地高的定义是:由地面点沿通过该点的椭球面法线到椭球面的距离。也称为椭球高,一般用符号H表示。大地高是一个纯几何量,不具有物理意义。同一个点,在不同的基准下,具有不同的大地高。利用GPS,可以测定地面点的WGS-84中的大地高。 C 大地水准面差距:大地水准面到椭球面的距离,称为大地水准面差距,记为hg (或N)。 如上图可以看出大地高和正高之间的关系:H=Hg+ hg 2几何内插法原理 几何内插法是通过一些既进行了GPS观测又具有水准资料的点上的大地水准面差距,采用平面或曲面拟合,配置三次样条等内插方法,得到其他点上的大地水准面差距从而反算这些点上的正高。 3二多项式拟合 N=a0+a1*dB+a2*dL+a3*dB2+a4*dL2+a5*dL*dB 公式一
式中dB=B-B0;dL=L-L0;B0=1/n∑B;L0=1/n∑L,n为GPS观测点的数量。 利用其中一些具有水准观测资料的公共点上的的大地高和正高可以计算出这些点的大地水准面差距。利用这些公共点的观测资料求得公式一的参数,再利用求得的公式进行其他点的大地水准面差距内插,和正高的拟合; 实验步骤: 1输入已知点的GPS观测值和相应的正常高构成矩阵B,L,H,h,分别是纬度矩阵,经度矩阵,大地高矩阵,正高矩阵; 2计算dB=B-B0;dL=L-L0;B0=1/n∑B;L0=1/n∑L,构成矩阵矩阵dB,dL和大地水准面差距矩阵N=H-h; 3将以上计算得到的矩阵代入公式一经过间接平差求得相应的参数a i,这样就能构成一个确定的多项式二; 4输入未知待求点的GPS观测值构成矩阵BB,LL,HH,计算相应的dBB,dLL; 5将dBB,dLL矩阵代入多项式二,解算出对应点的大地水准面差距NN矩阵; 6反算各点的正高h=H-NN; 7对计算得到的正高,大地水准面差距做对比分析; 实验分析: 1本实验中可以选择两种差值公式算法 (1)N=a0+a1*dB+a2*dL+a3*dB2+a4*dL2+a5*dL*dB (2)N=a0+a1*B+a2*L+a3*B2+a4*L2+a5*L*B 采用公式(1)的插值结果如下: Δh(dB)散点图 注:Δh(dB)是插值点的水准资料与插值结果的差值 采用公式(2)的插值结果如下:
高程测量的精度研究.
高程测量的精度研究
摘要 由于其高效方便,得到了迅猛发展,成为了现在地形测量、变形监测、低等级高程控制测量的首选。近年来在理论和技术高速发展的带动下在平面测量精度和高程测量精度方面都得到了很大的提高。硬件方面,扼流圈天线使得的多路径效应得到了有效的消除;理论方面,各种对流层、电离层延迟改正模型的提出及其应用,以及许多研究表明有效的消除误差理论的应用,使得的诸多与卫星及接收机之间的误差得到了很好的改正,所以在平面位置和高程的测量精度也进一步提高。由于测量的大地高应用于实际时需要经过高程转换为正常高,中间转换过程中需要解算高程异常,一系列的计算使得在高程控制测量方面误差偏大,影响了高程控制测量在许多方面的应用。本文在双频观测的基础上,通过解算原始的观测数据,建立一种区域的电离层延迟改正模型,取代现在最常用的克罗布歇模型来消除电离层对测量的影响,更好的消除电离层延迟的影响,以提高的解算数据的精度。 本文在阐述高程系统和高程测量原理的基础上,首先分析并总结了影响测高的各种因素及大地高的测定精度;其次对现有的高程转换方法进行了全面分析,结合工程算例,深入探讨了各种拟合模型的适合范围及精度情况;同时针对高程测量中几何方法转换的不足,本文研究了基于人工神经元网络转换高程的新方法,通过实例分析证明了该方法转换高程的可行性与可靠,对神经网络模型转换高程的BP网络结构中隐层单元数量的确定、隐含层数的确定、学习速率的选择、初始权值的选择、训练样本对网络泛化能力的影响等问题进行了较为深入的探讨。为避免应用单一模型进行高程拟合方法的局限性,在吸收和学习己有研究成果的基础上,将不同的拟合模型进行迭加,提高高程异常的逼近精度和可靠性。 关键词:1、三角高程;2、测量精度;3、井下三角;4、GPS高程测量
浅谈GPS高程测量技术在水利工程测量中的应用 张雷
浅谈GPS高程测量技术在水利工程测量中的应用张雷 发表时间:2017-12-28T21:34:42.133Z 来源:《基层建设》2017年第28期作者:张雷 [导读] 摘要:水利工程作为我国重要的基础建设之一其工程测量的精准度对工程质量产生最直接的影响,而在相关技术发展的推动下,在测量中可采用的技术也逐渐的完善,其中GPS高程测量技术就是一种以GPS所具备的实时、连续等特点作为测量基准的一种技术,在此条件下本文从应用的角度出发对此种测量技术的所具备的特点进行全面的总结。 西安景天水利水电勘测设计咨询有限公司陕西省 710016 摘要:水利工程作为我国重要的基础建设之一其工程测量的精准度对工程质量产生最直接的影响,而在相关技术发展的推动下,在测量中可采用的技术也逐渐的完善,其中GPS高程测量技术就是一种以GPS所具备的实时、连续等特点作为测量基准的一种技术,在此条件下本文从应用的角度出发对此种测量技术的所具备的特点进行全面的总结。 关键词:GPS高程测量技术;水利工程;工程测量 引言 目前水利工程项目在发展的过程中测量工作的要求愈发多样,原有的测量技术虽然在精准度方面可以满足工程的要求,但是其在应用中却受多种因素的影响使其实际的作业效率不高。而GPS高程测量技术则可以突破此种限制,因此对此种技术的研究具有较高的实用意义及研究价值。 1GPS高程测量技术在水利工程测量中的应用价值 1.1测量速度的优势 一般在应用GPS高程测量技术时需要以实际情况来设置相应的基站,以水利工程的特点来看其通常是设置4个基准点来进行相应的测量工作,与原有的测量技术相比,GPS高程测量技术可以对测量所获得的数据进行实时的传送,并且对被测区域进行全面的监控,使测量数据可以在最短的时间内得到传输,极大程度上提高了测量速度,使测量效率得以保证。 1.2测量精度的优势 原有的几何水准测量法在实际的测量工作中会受到环境、天气、位置等因素的影响,相应的测量结果也可能受到不同因素的影响产生一定的误差,而其所产生的误差对于水利工程来说会产生极大的影响,失准一直是工程测量工作中必须要避免的问题。而通过GPS高程测量技术的使用则可以有效规避外界因素对测量工作产生的影响,其在实际中不受天气、环境等因素的阻碍,可以对测量区域的数值进行准确的采集及反映。以现有GPS高程测量技术的发展情况来看,其测量所得参数值可以精确到以厘米为单位的测绘数据,具有较高的准确度。 1.3测量成本的优势 在上文中已经介绍了GPS高程测量技术在使用中所受制约因素非常少,在水利工程测量工作中其所需要考虑的因素及所采取的测量措施也会相应减少,因此其实际的测量周期较短且所需人力也相应减少,并且在水利工程现场一些较为复杂的区域也可以避免采用过多的测量项目而增加测量开支,这些应用优势从人力、物力、财力上有着极为明显的节约作用,减少资源的支出,使成本得到有效控制。 2GPS高程测量技术在水利工程测量中应用的实际情况 2.1重视度不高 虽然GPS高程测量技术在水利工程测量中有着较为明显的使用优势,但是由于此种技术在我国发展的年限较短,因此在工程测量工作中其一直无法占据主流位置。并且根据水利工程测量的实际需求及情况来看,测量单位原有的技术及工具设备等就可以满足相应的测量需求,虽然这些测量技术在实际的使用中较为繁琐,但是在测量经验、设备、成本等方面原有的测量技术就可以满足水利工程测量的基本需要,为此多数测量单位对GPS高程测量技术并不重视,也认为没有引进及学习的必要。 2.2专业素质不足 GPS高程测量技术作为一种工程测量中的高新技术对工作人员的个人素质及专业能力有着较高的要求,虽然此种技术可以更加方便、简单的获取测量数据,但是其在应用中却需要工作人员对其进行系统性操作及控制。一般来说在进行施工的过程中其必须要以规程标准作为依据来执行各个环节。目前在GPS高程测量技术的应用中许多工作人员对于技术内容及理念掌握不够完善,操作执行不够准确,这些因素无疑会对测量结果最终的精准度产生影响。 3提升GPS高程测量技术在水利工程中应用效果的方式 3.1选择适当的基准点 在进行GPS埋点的选择时需要充分考虑周边环境等因素,在水利工程测量中其定点应以空旷、开阔的区域为佳,在定点的确定上先考察周边是否有建筑物等,并选取稳固、坚实的区域作为取点部位,保证区域内对设备的影响因素较少,以此来确保设备可以长时间留存且不被损坏。在设备的布置上要使相邻设备之间互相都在可观测范围内,同时定点周边无明显障碍物影响其测量效果。并且要注意为了避免GPS信号受到干扰需要确保周边无高频信号发射源及设备,避免GPS信号传输受到不良影响。 3.2对测绘地区进行科学观测 一般在大型水利工程测量现场需要经由3台GPS高程测量设备进行测量工作,以此来保证信号、数据的传输及接收的质量,从而对观测区域的数据进行实时的分析。在测量时间的确定上需要以水利工程的实际需求为主,选择动态或是静态测量方式。一般对测量区域进行同步观测的时长需要保持在40min之上,在动态观测中以实际需求对观测时长进行适当的延长,在测量数据的获取上以0.25min/次为基准,保证数据获取的精准性。 3.3扩大对GPS高程测量技术的宣传 为了对此种技术进行更好的应用,对其应用优势进行宣传是一种扩大其影响力的方式,因此可以通过对GPS高程测量技术的成果及在水利工程测量中的适应特点进行宣传,使此种技术在水利工程测量中的应用可以被重视起来,以此来进一步的促进GPS的应用。 4GPS高程测量技术在水利工程测量中的应用方向 4.1水利工程管线测量工作 水利工程渠道管线交错分布,是工程建设中的重点部分,因此在实际中此部分的建设需要耗费大量的资源财力,同时管线的复杂性也
GPS高程拟合方法及其应用
GPS高程拟合方法及其应用 论文介绍了GPS高程拟合的原理。介绍了多种拟合模型的拟合原理、模型参数的优化选择,给出了利用地表拟合求解较高精度高程异常的方法,将各种模型进行应用对比。 标签:大地高GPS水准高程异常拟合模型 1 GPS高程异常 当前GPS技术在平面控制测量工作中已经得到了广泛的应用,但在高程控制测量中却未能得到广泛应用。原因是GPS高程测量得到的是建立在WGS-84坐标系上的大地高H,而我国测量工作中采用的是正常高H。GPS高程测量可以获得厘米级精度的大地高,但在GPS大地高转换为正常高过程中,由于未能获得同等精度的高程异常ζ,导致转换所得的GPS正常高达不到精度要求。 2高程拟合常用方法 拟合法是对GPS观测点进行几何水准联测,同一点的大地高减去正常高得到该点的高程异常,再把测区的似大地水准面假定为多项式曲面或者其他数学曲面去拟合已知高程异常的点,根据拟合的曲面内插其他GPS点的高程异常值。拟合法进行GPS高程转换的数学模型很多,如多项式曲线拟合、最小二乘平面拟合、二次多项式曲面拟合等,归纳起来可以分为线状拟合模型、平面拟合模型和曲面线状拟合模型三类。 3高程拟合实例分析 一测区,选取其中32个GPS水准高程点进行拟合,将32个水准点的X与Y值通过AutoCAD一个简短的VB加载程序展绘成图: 方案一:16个起算点均匀分布 选取点2,4,8,10,11,13,16,17,19,20,24,25,26,30,31,32十六个点均匀分布于分布已知水准点,经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为11.820480毫米。 方案二:16个起算点分布在一侧(非均匀分布) 选取点位集中于右下侧,分别为1,2,3,5,9,10,11,14,18,21, 22,23,25,27,28,29十六个点。经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为14.631518毫米。
谈全站仪的高程测量精度
谈全站仪的高程测量精度 本人在从事工程技术管理的工作中,经常听到有测量工程师抱怨说某某全站仪不好用,测高程测不准。于是我问他:测距离准不准?得到回答是,测距离没问题!于是我就奇怪了,为什么测距离准,测高程不准呢?全站仪工作时测得夹角a和距离L,如下图: s H L a H=L*sina S=L*cosa 既然S准确,相应的H也应该准确,因为他们的计算变量都是一样的。但经过本人实际操作,全站仪测高程精度确实比较差。到底是什么原因使得同样的参数,计算出来的结果一个精确,另一个却不精确呢?进过详细分析,本人发现其实并不是仪器的问题,而是误差给大家带来的麻烦:
90sinx cosx Y Y1 Y2 上图是正弦曲线和余弦曲线示意图,我们可以发现在全站仪镜头水平x=0°—竖直x=90°期间y值的变化,当我们在接近0°附近测量时f(x)=cosx相对于g(x)=sinx对x的增量来说不敏感,也就是说,当我们在仪器测量a角时,一个增量Δa引起的S的变化比H的变化小的多,而实际操作中,各位测量工程师也会发现,由于仪器的构造限制,很少有机会在测量的时候使全站仪仰俯超过45°,而真正当仰俯角超过45°,(例如在近距离测量盖梁或者墩顶高程)时,全站仪的高程测量精度并不比水平坐标的测量精度低。例如:sin10.1-sin10=0.00171855,cos10.1-cos10=-0.0003045,这表明在角度误差0.1°的情况下,瞄准接近100米的目标,高程会差17cm,而距离只差3cm,这就是为什么大家都抱怨全站仪测高程不精确的原因。 当然测量高程精度不准还与另外一些因素有关,如:1、仪器高不能准确测得,2、镜杆高度由于标杆底的磨损产生偏差,3、对站标时习惯性只左右对中,不上下对中等。这些原因都可能使全站仪的高
高程拟合
作业: 1.高程异常是如何产生的?请从实际角度谈谈如何有效地解决这一问题? 答:高程异常是由地下物质及其密度分布不均匀产生的重力异常导致的。 大地高与正常高之间的关系式:Hr= H84-ξ 其中ξ表示似大地水准面至椭球面间的高差,叫做高程异常。 地面点的正常高Hr是地面点沿铅垂线至似大地水准面的距离。 大地高是由地面点沿通过该点的椭球面法线到参考椭球面的距离,是一个几何量,不具有物理上的意义。 实际上,很难获得高精度的高程异常,而GPS单点定位误差又较大,一般测区内缺少高精度的GPS基准点,GPS网平差后,很难得到高精度的大地高H84。所以很难应用上式精确的计算各GPS点正常高Hr。 实际应用中解决高程异常问题,精确计算各GPS点的正常高Hr,目前主要有GPS水准高程,GPS重力高程,GPS三角高程等方法。 1 GPS水准高程 目前,国内外用于GPS水准计算的各种方法主要有:绘等值线图法;解析内插法(包括曲线内插法、样条函数法和Akima法);曲面拟和法(包括平面拟合法、多项式曲面拟合法、多面函数拟合法、曲面样条拟合法、非参数回归曲面拟和法和移动曲面法)。 1、绘等值线图法 这是最早的GPS水准方法。其原理是:设在某一测区,有m个GPS点,用几何水准联测其中n个点的正常高(联测水准的点称为已知点),根据GPS观测获得的点的大地高,可以求出n个已知点的高程异常。然后,选定适合的比例尺,按n个已知点的平面坐标(平面坐标经GPS网平差后获得),展绘在图纸上,并标注上相应的高程异常,再用1~5cm的等高距,绘出测区的等高异常图。在图上内插出未联测几何水准的(m-n)个点(未联测几何水准GPS 的称为待求点),从而求出这些待求点的正常高。 2、解析内插法 当GPS点布设成测线时,可应用曲线内插法,求定待求点的正常高。其原理是:根据测线上已知点的平面坐标和高程异常,用数值拟合的方法,拟合出测线方向的似大地水准面曲线,再内插出待求点的高程异常,从而求出点的正常高。
谈影响GPS高程拟合高程精度因素
谈影响GPS高程拟合高程精度的因素摘要:gps 定位技术以其精度高,全天候.成本低,效率高等特点被广泛应用于测绘及其它领域。目前在局部地区应用gps 测定的大地高精度进过高程拟合,已可以代替水准测量,将高程拟合成果直接应用到实际测量工作中,为各项工程节约大量时间和人力物力。但在一些实际工作中gps拟合高程代替水准高程又经常出现一些问题。本文将对gps解算原理经行简单介绍,重点对实际工作影响gps高程拟合高程精度的因素经行分析。 关键词:gps高程拟合高程;精度 abstract: gps technology to its high accuracy, all-weather. cost is low, the efficiency high characteristic is widely used in surveying and mapping and other fields. at present in the local area in the application of the earth were high precision gps in elevation fitting, already can take the place of the standard measurement elevation to synthetic fruit applied to practical measurement, for all the engineering save large amount of time and manpower. but in some practical work gps fitting elevation instead of standard and often have problems elevation. this paper simulates the principle of gps simple line introduces the influence to the practical work gps elevation fitting accuracy of elevation the line factor analysis.
RTK高程拟合
工程之星3.0 特色功能之一:控制点测量介绍 S730手簿蓝牙传输文件过程 RTK测量高程精度简析 2011-05-26 13:26:55| 分类:RTK测量资料| 标签:|字号大中小订阅 石家庄南方测绘导航产品部郭晓辉 使用RTK做地形图测量,既能快速的获得平面坐标又能快速的获得高程,大家都很容易接受,可是当谈论到使用RTK 是否可以做水准测量时,不少朋友都在心里打了一个问号。到底RTK 测得的高程和水准测量差多少呢?能不能满足工程的要求。其实这方面的问题已经被专家论证了多次,答案是在严格控制及选用合理的作业方法下,RTK 测量高程可以满足四等水准测量及等外的水准测量。毫无疑问,使用RTK 进行水准测量将会大大降低工作强度,同时提高作业效率。下面就介绍一下,如何使用RTK达到如上所述 的效果。 首先分析下GPS测得高程和水准测量求高程的区别,GPS 测量求得的原始坐标是WGS-84坐标(B,L,H)大地纬度,大地精度,大地高。而我国水准测量是采用1985国家高程基准,以似大地水准面为起算面,最后是以正常高作为使用的高程。因为测量原理不同,两种测量的起算面不同,所以两种高程值之间存在高程异常,即大地高= 正常高+高程异常。所以如果使用GPS要达到水准测量要求的正常高的值,必须要求提高得的大地高和高程异常值的精度。大地高的精度如南方灵锐S86RTK的精度指标垂直精度±2cm+1ppm ,静态,快速静态高程精度±5mm+1ppm,而精确的求出高程异常就是关键所在。 南方GPS,RTK 用高程拟合的方法精确求得高程异常,从而可以实时的得到控制范围内的正常 高。 GPS 水准高程拟合方法是: 在GPS 网中联测一些水准点, 利用这些点上的正常高和大地高求出它们的高程异常值, 再根据这些点上的高程异常值与坐标的关系,用最小二乘的方法拟合出测区的似大地水准面,利用拟合出的似大地水准面,内插出其他GPS 点的高程异常, 从而求出各个未知点的正常高。用于GPS 水准拟合的数学模型很多, 不同的数学模型对不同地形条件具有不同的拟合精度, 因此GPS 水准拟合模型拟合精度的探讨一直是GPS 应用研究领域的热点问题。其中多项式就是GPS 水准拟合模型的一 种,其模型可表述为 ζ= f ( x , y ) + ε 当GPS 点布设成网状时,一般采用曲面拟合的方法。 设测站点的高程异常ζ与坐标之间存在以下函数关系ζ i = f ( xi , y i ) + ε i其中, f ( xi , y i ) 为ζ的 趋势值, ε i 为误差。选用空间曲面函数 f ( x i , yi ) = a0 + a1x i + a2y i + a3x2i + a4x iyi + a5 y2i + a6 x3i + a7 x2iy i + a8x iy2i + a9y3i ( 4)进行拟合,式中ai 为待定参数。在已知点个数大于等于参数个数求出参数ai ,进而求出测区内任意点的高程异常。根据测区的不同情况,也可以选用不同的参数进行拟合。选用的参数不同,拟合出的曲面的形式也不 相同。 1多项式拟合模型分型
CORS系统高程拟合精度的探讨
CORS系统高程拟合精度的探讨 摘要:连续运行参考站(CORS)系统提供了全天候,高精度的定位服务。GPS高程精度一直难以评定,结合区域实例,利用水准测量限差和精度概念对CORS下的高程拟合精度进行了探讨。 关键词:CORS系统,高程拟合,五等水准 Abstract: Continuously Operating Reference Stations (CORS) system provides all-weather, high-precision positioning service. As GPS height accuracy has been difficult to assess, combining with regional examples, the elevation fitting accuracy of CORS is explored by using the leveling tolerance and the concept of accuracy. Key words: CORS system; elevation fitting; five-leveling GPS连续运行参考站系统(Continuously Operation Reference Stations System,简称CORS)是目前国际上主要的地面地理信息采集设施,它集成了卫星导航定位(GPS、GLONASS等)、数字通讯、有线及无线网络等技术,形成了一个不间断地面信息源采集系统,为测绘领域提供了全天候,高精度的定位服务。近几年国内省级CORS系统不断建立,有些加入了似大地水准面精化模型,有的则没有 SDCORS是“山东省基础测绘”、十一五‟规划”的重点项目,项目于2009年4月开始建设,2011年2月在济南正式通过验收;同日,由101个基准站组成的SDCORS正式启动,开始为山东省各相关行业提供服务。但是目前SDCORS系统并未加入大地水准面精化模型数据,高程数据通过高程拟合模型实现,本文在SDCORS下,在A城市进行了一定规模的数据采集,通过与五等水准高程成果比较,来探讨拟合高程的精度,看是否能够满足平原地区的大比例尺(1:1000)测图要求。 实验小组首先对A城市(平原地区)的5个C级GPS点进行观测求取了七参数,计算得到了高程拟合模型。然后在城市200km2的范围内,横纵均匀布设了140个固定图根点,并用RTK进行了测量,得到了高程坐标。最后对图根点全部施测五等水准[1],并与E级GPS点联测,得到了高程成果。 图一水准路线图 注:七参数:ΔX,ΔY,ΔZ,ωX,ωY,ωZ,m七个,其中(ΔX,ΔY,ΔZ)为坐标平移量,(ωX,ωY,ωZ)为坐标轴间的三个旋转角度(又称为欧拉角),m为尺度因子。
GPS高程测量原理及方法探讨.
广东科技2010.2总第231期 GPS 高程测量原理及方法探讨 谢劲松 (广东省广州市510000 1引言 GPS (欲了解更多?请见本期【科技“生词”解释】技术的出现,为确定大地水准面高提供了新的途径,提高了作业的效率。然而我们的实用高程采用的是以似大地水准面为基准的正常高。因此,我们必须要实现GPS 大地高向正常高的转换,从理论上讲,实现GPS 大地高向正常高转换最好的方法是综合利用GPS 测量数据、重力测量数据和地球重力场模型进行转换。然而,对于一般工程单位来说,考虑到作业成本的问题,人们不可能花那么多的经费去获取昂贵的重力资料。本文就是探讨如何结合工程实际 情况,利用较少的经费获取较高精度的GPS 高程, 从而实现低成本、高效率、高质量的测量成果。 2常用高程系统的基本定义 大地高:大地高系统是以参考椭球面为基准面的高程系 统。某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。一般用H 表示。
正高:正高系统是以大地水准面为基准面的高程系统。某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离。一般用H 正高表示。 正常高:正常高系统是以似大地水准面为基准的高程系统。某点的正常高是该点到通过该点的铅垂线与似大地水准面的交点之间的距离。一般用h 表示。 高程异常:高程异常是指似大地水准面到参考椭球面的距离。一般用ζ表示。 大地高与正常高之间的关系可以表示为: ζ=H-h (13GPS 高程测量原理 利用GPS 可以测量出高精度的WGS84三维坐标(即大地经纬度和大地高,但是我国大多数用户需要的是正常高(例如 1985国家高程基准等 ,那么就需要将大地高转换成为我们需要的正常高,由图1可以知道,h=H-ζ, 由此可以知道,将GPS 大地高转换成正常高的关键就是求出GPS 点上的高程异常值 ζ。因此, 在利用GPS 确定了高精度的大地高后,求正常高的过程实际上就是求高程异常的过程。 4常用GPS 水准高程计算方法介绍 通过前面的介绍我们知道,由大地高转换到正常高的过程 就是求高程异常值ζ的过程。目前,求高程异常值的方法有很
RTK测高试验与精度分析
马永来宋海松弓增喜(黄河水利委员会水文局郑州450004) 摘要:RTK技术是基于载波相位观测量的实时动态定位技术。为了解RTK技术的应用情况,在小浪底库区及花园口大堤做了RTK测高试验,并对实测资料进行了分析。分析结果表 明:RTK测高精度能够达到仪器标称精度,数据可靠;若选择VDOP<4、可用卫星为5颗以上的情况下进行观测,可提高观测精度;RTK测量高差通过布尔莎模型转化后,仍为大地高高差,经高程拟合消除高程异常后,所得正常高可以达到五等水准测量要求。 关键词:精度实时动态测量RTK快速静态测量高程拟合 GPS即全球定位系统,80年代主要是基于载波相位差分的静态测量,要得到可靠的解向量,通常需要观测一二个小时l至更长时间、随着GPS应用技术的发展,义出现了GPS快速定位技术(快速静态、动态、伪静态)、当基线长度小于15 km时,GPS快速定位技术可在较短的时间内达到厘米级的定位精度,具有。·短、平、快,,的优点、然而,观测时需要对己知数据点进行各种各样的初始化,对卫星凡何条件及卫星跟踪都有较高要求,而巨只能通过事后数据处理得到测量结果、为缩短观测时间,提高工作效率,在小范围测量中,义逐渐提出了一种新技术实时动态测量RTK(Real Time Kine matic技术)。 1.RTK技木简介 RTK技术是基于载波相位观测量的实时动态定位技术,一般中基准站、移动站、数据通讯链3部分组成、其工作原理是:基准站接收机~调制器~发射电台~转发器~接收电台~解调器~移动站接收机、基准站和移动站同时接收GPS卫星定位信息、通过差分数据链,移动站接收基准站发送的GPS数据,结合自月采集的GPS数据进行实时处理,在Is内以厘米级的精度给出移动站的点位信息、通过OTF(Oil The Fly)实时处理算法,移动站在动态环境下可进行初始化处理,无需在己知点上进行初始化、RTK测量必须有伪距和相位观测值(最好带双频P码,有利于实时快速解求模糊度)。 2.RTK测高试验与精度 2.1试验基本情况 RTK测量和解算是在WGS84坐标系中进行的,实时给出的高程为大地高、我国采用的高程为丁常高,在实际应用时还需将大地高转换为丁常高、因此,RTK的应用范围,RTK技术确定丁常高的精度和可靠性,以及将大地高转换为丁常高时采用的方法等都是人们十分关心的问题、为此我们在小浪底库区进行了RTK实地测量、为了解平原地区倩况,又在郑州郊区黄河花园口大堤选驭部分试验点,试验点高程范围为98 856-314053 m,移动站至基准站间距离为0-1049 km、试验点均经快速静态布网测量,井经过平差,得到了WGS84大地坐标和大地高成果、试验之前对所有试验点进行了四、五等水准测量、RTK试验所用仪器为Trimble4000SSE(OTF)、仪器实时动态(RTK)标称精度:水平10 mm+ZD。10‘,垂直20 mm+ZD。10‘;快速静态标称精度:水平10 mm+D。10‘,垂直10 mm+ZD。10‘、D表示测量基线的距离。
GPS高程测量精度提高的方法和措施
GPS高程测量精度提高的方法和措施 摘要:GPS(全球定位系统)作为一种高科技的三维测量工具,已被广泛地运用到测量实际工作中去。要提高GPS高程测量的精度,就必须探讨GPS测高的制约因素和提高GPS测高精度的处理办法。 关键词:GPS高程测量水准测量 一、GPS高程测量原理 1.大地高系统。大地高是由地面点沿通过该点的椭球面法线到椭球面的距离,通常以H表示。利用GPS定位技术,可以直接测定测点在WGS—84中的大地高程。大地高是一个几何量,不具有物理上的意义。它通过与水准测量资料、重力测量资料等相结合,来确定测点的正常高,具有重要的意义。 2.正高系统。由地面点并沿该点的铅垂线至大地水准面的距离称为正高,通常以Hg表示。正高具有重要的物理意义,但不能精确测定。 3.正常高系统。正常高系统是以似大地水准面为基准面的高程系统,通常以h 表示。正常高同样具有重要的物理意义,广泛应用于水利工程、管道和隧道工程建设中,而且可以精密地确定。正常高系统为我国通用的高程系统,水利工程常用的1956年黄海高程系和1985国家高程基准,都是正常高系统。 4.GPS水准高程。利用GPS和水准测量成果确定似大地水准面的方法为GPS 水准。目前主要有GPS水准高程(简称GPS水准)、GPS重力高程和GPS三角高程等方法。在实际运用中主要采用GPS水准高程方法来确定似大地水准面。所谓GPS水准就是在小区域的GPS网中,用水准测量的方法联测网中若干GPS点的正常高(这些联测点称为公共点) ,那么根据各GPS点的大地高就可求得各公共点上的高程异常。然后由公共点的平面坐标和高程异常采用数值拟合计算方法,拟合出区域的似大地水准面,即可求出各点高程异常值,并由此求出各GPS点的正常高。因此,按GPS所测定的大地高,当已知正常高或正高时,可以确定高程异常或大地水准面高;反之,当已知高程异常或大地水准面高时,可以确定正常高或正高。 二、影响GPS高程测量的因素 1.高程基准面对GPS高程测量精度的影响及防治措施。在很多地区,使用已知的正常高(或正高)来定义高程基准面。有时定义多个高程基准面,每一个高程基准面都由一个原点(例如验潮站观测点)推算,该点的高程值由一个或几个潮汐的平均海水面值来决定。如果海洋测量或水准测量有误,将会使高程基准面的基准偏离真实的重力模型,但可以增加一个曲面到大地水准面模型加以解决。为了检核高程基准面,常常使用GPS观测至少3个高程基准面点来实现。对于现代的高程基准面,改进对高程信息的管理,许多数据库仅仅贮存了正常高(或正高),然而高程基准面渐渐地变为正常高和椭球高的结合物。
全站仪高程控制测量精度与误差分析
全站仪高程控制测量精度与误差分析 【摘要】水准测量操作简单,数据量相对较小,容易计算与处理,而且精度高。但是,由于位置差异,在一些特殊的地理位置采用全站仪进行高程控制测量更能提高效率。例如在一些山区、丘陵地带,应用几何水准测量效率就很会很低,在应用全站仪进行高程测量的时候,采用什么方法来进行数据处理也是非常重要的。为了提高计算精度与工作效率,更有利于设计最佳方案进行测量工作,那么我们将采用几种方法进行精度与误差分析比较。精度与误差也是我们最需要关注的。经过实践操作证明,使用全站仪进行山地水准测量能够达到三、四等要求。因此,采用全站仪进行高程控制测量能够达到精度要求,大大提高了工作效率。 【关键词】全站仪;高程;精度分析;误差分析 1.引言 随着测绘专业的不断发展,全站仪的应用越来越广泛,并以其操作简捷,电脑计算,大大提高工作效率,而被广大测绘人员所青睐。目前,人们对全站仪的研究也是越来越深入,希望能够将它应用到更多的工作中,而在山地高程控制测量中,使用水准仪的传统方式进行测量虽然精度高,但是工作量大,耗时长,效率太低;而采用三角高程控制测量虽不受地形限制,但是它受地球曲率、棱镜高和仪器高的因素的影响,精度与水准测量相比过低,误差相对较大。那么,使用全站仪绝对是一个很好的发展方向,这就可以摆脱传统的水准测量方式,减少了数据量,降低了工作难度,不受地区地形限制,影响测量精度因素较少。我们通过实践与研究,对全站仪高程测量精度与误差进行了分析。 2.全站仪高程测量原理与精度分析 (1)基本原理 全站仪高程测量的基本原理是把全站仪当作水准仪来使用,使棱镜高相同,达到抵消仪器高和棱镜高的目的,从而不必量取棱镜高和仪器高,这样既能在地形复杂地区进行快速的高程传递,又能确保足够的高程测量精度。如果在较短的距离内不考虑两差对高差测量的影响,那么观测计算得到的A,B两点高差只受垂直角测量和距离测量精度的影响。如果两点间高差较大或距离较远,仅安置一次仪器不能测出其高差时,就可以在两点间安置多次仪器,加设多个转点,然后再分段设站观测。图1中各符号所含意义如下:SCA为后视斜距;SCB为前视斜距;DCA为后视平距;DCB为前视平距;iA为后视点棱镜的高度;iB为前视点棱镜的高度;VC为全站仪的高度;hAC为后点A至测站点C的高差;hCB为测站点C至前点B的高差;h1为后视棱镜中心至全站仪横轴的高差;h2为全站仪横轴至前视棱镜中心的高差;hAB为后视点A至前视点B的地面高差;A1为全站仪观测后视棱镜中心点的竖直角(俯角或仰角);A2为全站仪对前视棱镜中心点的竖直角(俯角或仰角)。原理图如下:
GPS控制网高程拟合
GPS控制网高程拟合 【摘要】通过对沁河防汛工程D级GPS网的高程拟合精度分析,探讨GPS高程拟合成果的精度与起算点分布、起算成果精度、高程拟合数学模型、GPS数据处理软件的关系。 GPS network of Qinhe flood control projects D elevation fitting accuracy, explore the accuracy of the GPS elevation fitting the results with the starting point of distribution, the date the results of precision, the elevation fitting a mathematical model, the relationship of the GPS data processing software. 【关键词】GPS 高程异常值中误差曲面拟合EGM96大地水准面模型 前言 全球定位系统(Global Positioning System-GPS)是美国从本世纪70年代开始研制,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。经近10年我国测绘等部门的使用表明,GPS以全天候、高精度、高效率等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等测绘学科,给测绘领域带来一场深刻的技术革命。目前,大多数的城市首级控制网均采用GPS测量,而其中的高程控制主要采用传统的几何水准测量方法建立高精度的水准网。GPS高程测量却常常被忽视,认为其精度不太可靠。因此,为探讨GPS测量高程拟合成果的精度与起算点分布、起算成果精度、高程拟合数学模型、GPS数据处理软件的关系,我局结合沁河防汛工程D级测量GPS高程拟合的工作,对GPS拟合高程的精度进行了探讨,对于平坦地区以供测量GPS用户参考。 1 GPS网高程拟合的技术要求 1.1 GPS高程拟合成果外部检核 1.1.1 首先对D级GPS网中的所有点联测四等水准或三角高程,选用其中部分点作为GPS高程拟合的
GPS高程拟合精度分析
GPS高程拟合精度分析 李毅方明乐陈溪 广西第一测绘院,南宁市建政路5号530023 摘要:本文介绍了常用的GPS高程拟合方法和模型,通过实例对GPS高程拟合精度进行了分析探讨。 关键词:GPS高程测量高程拟合精度分析 1引言 GPS测量可以同时获得相对精度较高的三维坐标,即大地经度L、大地纬度B和大地高H。对于L、B可以采用严密的数学公式,将其转换成高斯平面坐标x、y,而大地高H是以WGS-84椭球面为基准的高程,是一个几何量,不具有物理意义。实际应用中的地面高程是以似大地水准面为起算面的正常高。本文将介绍将大地高这一几何量转换成具有物理量的正常高最常用的方法,并通过实例分析了影响GPS高程拟合精度的因素,以及提高GPS高程拟合精度的方法。 2GPS高程拟合方法 依据高程系统的理论,地面上任意一点的大地高H与正常高h之间的关系为: H=h+ζ(l)式(1)中ζ为高程异常,即似大地水准面与参考椭球面之间的差距。由式(1)可看出,若能求出GPS点的高程异常ζ,就可由各GPS点的大地高H求得各点的正常高h。因此,GPS高程转换的关键在于高程异常的精确求得。通常,高程异常是采用天文水准或天文重力水准的方法来测定的。但由于这些资料不易获得,无法满足工程建设的要求。为此我们可以在布设的GPS网中选择一定数量均匀分布的点,利用水准测量的方法直接联测高程(这些联测点称为公共点),然后根据式(1)求得各公共点上的高程异常ζ,然后由公共点的平面坐标和高程异常采用数学拟合计算方法,拟合区域的似大地水准面,即可求出其他GPS点的高程异常,从而求得各GPS点的正常高。 目前,国内外求取高程异常主要是采用纯几何的曲面拟合法,即根据区域内若干公共点上的高程异常值,构造某种曲面逼近似大地水准面。而多项式曲面拟合法是一种最常用的较简单、有效、实用的方法。 多项式曲面拟合法原理是:根据测区中公共点的平面坐标或大地坐标和高程异常ζ值,用数值拟合法,拟合出测区似大地水准面,再内插出待求点的高程异常值ζ,从而求出待求点的正常高。利用这种拟合方法求出的高程与直接水准测得的高程同属一个系统,不受起算点绝对坐标误差的影响。该方法的数学模型为: ζ+f(x i,y i)+εi(2)式(2)中,f(x i,y i)为ζ的拟合函数,εi为残差 实际应用中,采取二次曲面拟合法进行拟合,其表达式为: f(x i,y i)+a0+a1x i+a2y i+a3x i2+a4y i2+a5x i y i(3)
GPS高程测量
.GPS高程测量 一、高程系统 1、高程系统 (1)大地高(Hg) (2)正常高/正高(Hr/hg) 2、大地高系统 大地高系统是以参考椭球面为基准面的高程系统。某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。大地高也称为椭球高,大地高一般用符号H表示。大地高是一个纯几何量,不具有物理意义,同一个点,在不同的基准下,具有不同的大地高。 3、正高系统 正高系统是以大地水准面为基准面的高程系统。某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号hg表示。 4、正常高系统 正常高系统是以似大地水准面为基准的高程系统。某点的正常高是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr表示。 5、高程系统之间的转换关系 Hr=H-r Hg=H-hg 二、GPS测高方法 1、等值线图法 从高程异常图或大地水准面差距图分别查出各点的高程异常或大地水准面差距,然后分别采用下面两式可计算出正常高和正高。 在采用等值线图法确定点的正常高和正高时要注意以下几个问题:
(1)注意等值线图所适用的坐标系统,在求解正常高或正高时,要采用相应坐标系统的大地高数据。 (2)采用等值线图法确定正常高或正高,其结果的精度在很大程度上取决于等值线图的精度。 2、大地水准面模型法 地球模型法本质上是一种数字化的等值线图,目前国际上较常采用的地球模型有OSU91A等。不过可惜的是这些模型均不适合于我国。 3、拟合法 (1)基本原理 所谓高程拟合法就是利用在范围不大的区域中,高程异常具有一定的几何相关性这一原理,采用数学方法,求解正高、正常高或高程异常 (2)注意事项 –适用范围 上面介绍的高程拟合的方法,是一种纯几何的方法,因此,一般仅适用于高程异常变化较为平缓的地区(如平原地区),其拟合的准确度可达到一个分米以内。对于高程异常变化剧烈的地区(如山区),这种方法的准确度有限,这主要是因为在这些地区,高程异常的已知点很难将高程异常的特征表示出来。 –选择合适的高程异常已知点 所谓高程异常的已知点的高程异常值一般是通过水准测量测定正常高、通过GPS测量测定大地高后获得的。在实际工作中,一般采用在水准点上布设GPS点或对GPS点进行水准联测的方法来实现,为了获得好的拟合结果要求采用数量尽量多的已知点,它们应均匀分布,并且最好能够将整个GPS网包围起来。 –高程异常已知点的数量 若要用零次多项式进行高程拟合时,要确定1个参数,因此,需要1个以上的已知点;若要采用一次多项式进行高程拟合,要确定3个参数,需要3个以上的已知点;若要采用二次多项式进行高程拟合,要确定6个参数,则需要6个以上的已知点。 –分区拟合法 若拟合区域较大,可采用分区拟合的方法,即将整个GPS网划分为若干区域,利用位于各个区域中的已知点分别拟合出该区域中的各点的高程异常值,从而确定出它们的正常高。下图是一个分区拟合的示意图,拟合分两个区域进行,以虚线为界,位于虚线上的已知点两个区域都采用。