电路理论基础A第五章(哈工大)答案
答案5.1
设负载线电流分别为A B C i i i
、、,由KCL 可得A B C 0I I I = ++。又
A B C 10A I I I ===,则A B C i i i 、、的相位彼此相差120?,符合电流对称条件,即线电流
是对称的。
但相电流不一定对称。例如,若在三角形负载回路内存在环流0I
(例如,按三角形联接的三相变压器),则负载相电流不再对称,因为
0CA CA 0BC BC 0AB AB ',','I I I I I I I I I +=+=+=
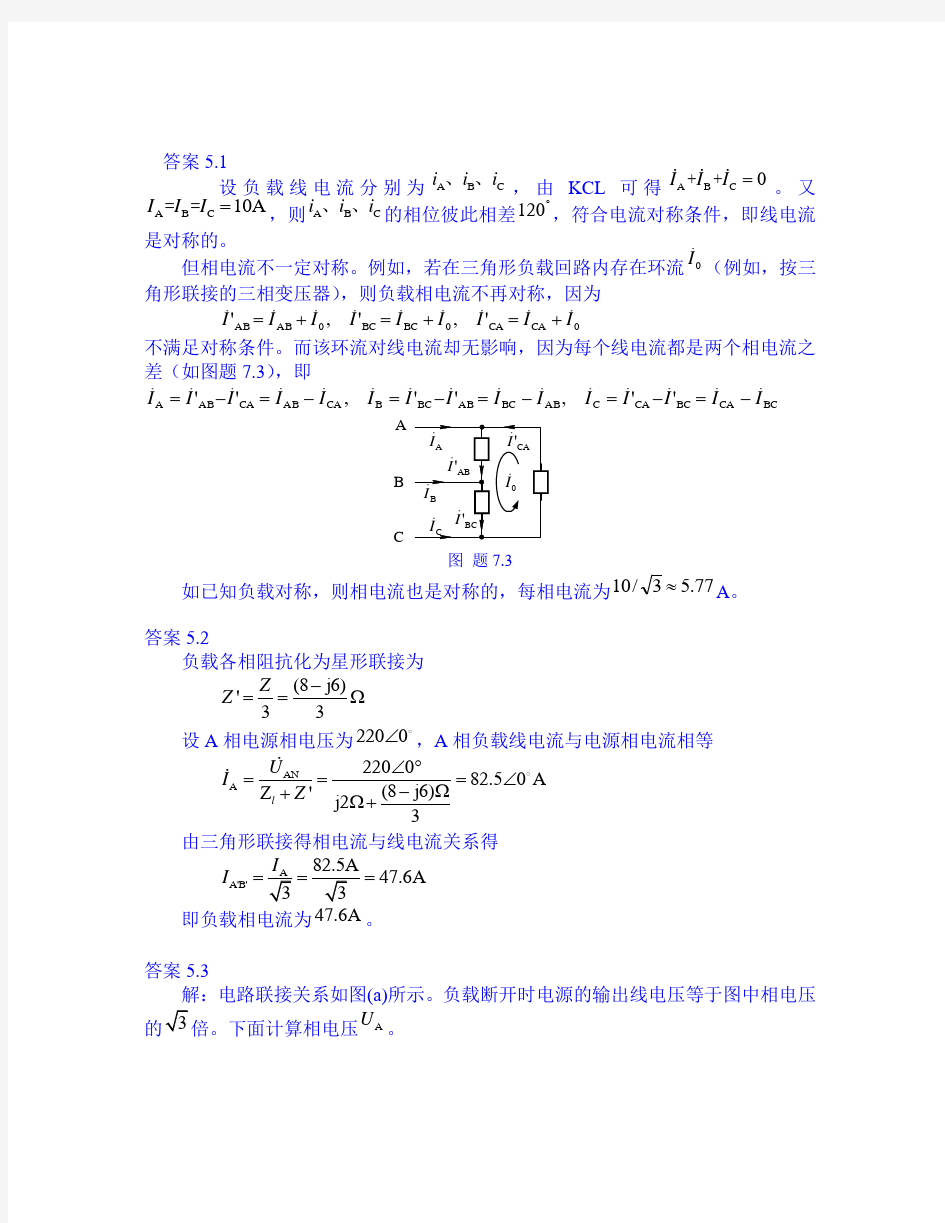
不满足对称条件。而该环流对线电流却无影响,因为每个线电流都是两个相电流之差(如图题7.3),即 BC CA BC CA C AB BC AB BC B CA AB CA AB A '','',''I I I I I I I I I I I I I I I -=-=-=-=-=-=
A
B C
图 题7.3
如已知负载对称,则相电流也是对称的,每相电流为77.53/10≈A 。
答案5.2
负载各相阻抗化为星形联接为
(8j6)'33Z Z -==Ω
设A 相电源相电压为2200∠
,A 相负载线电流与电源相电流相等
AN A 220082.50A (8j6)Z 'j2
3l U I Z ∠
?===∠-Ω
+Ω+
由三角形联接得相电流与线电流关系得
A'B'
47.6A
I ===
即负载相电流为47.6A 。
答案5.3
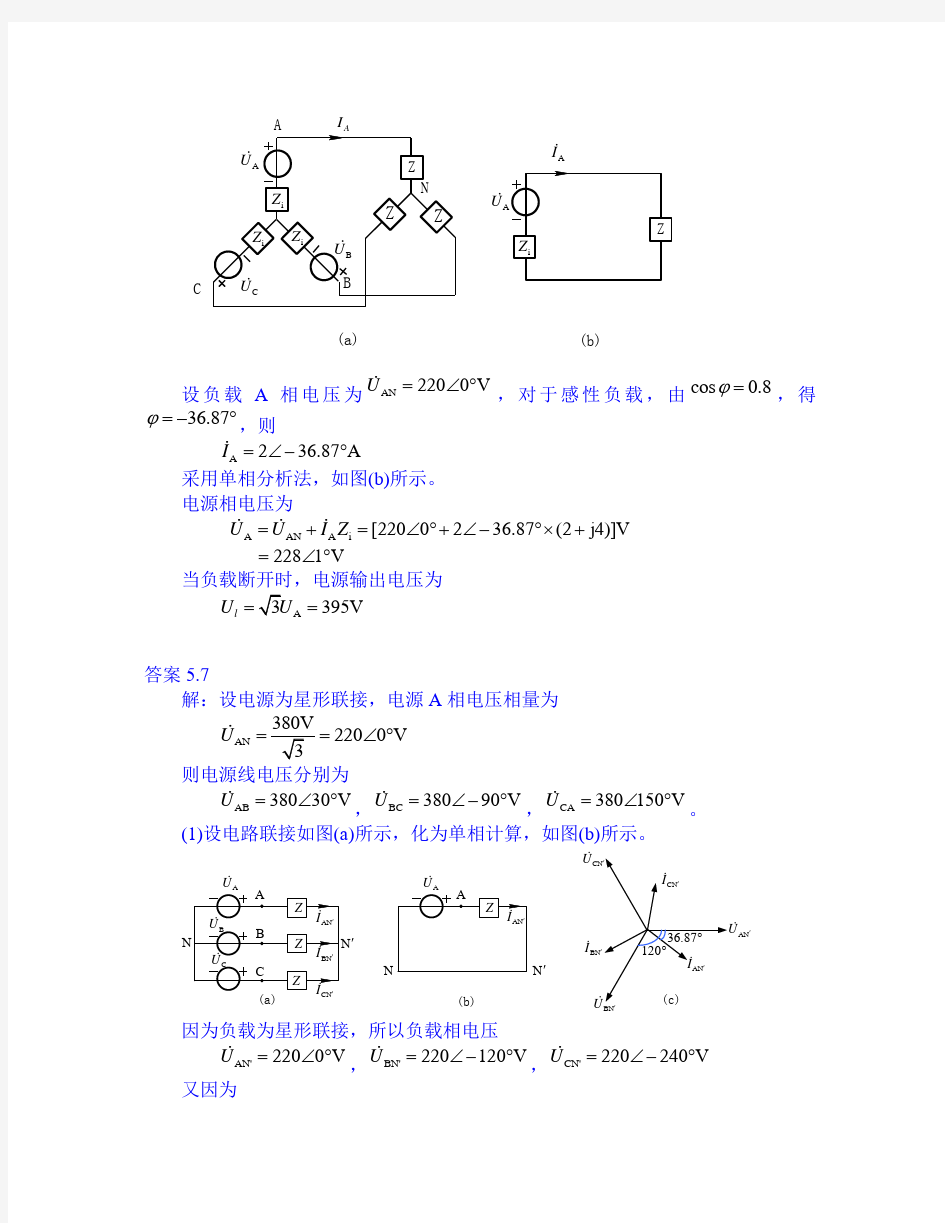
解:电路联接关系如图(a)所示。负载断开时电源的输出线电压等于图中相电压
倍。下面计算相电压A U
。
A
I (b)
I C
(a)U
设负载A 相电压为AN 2200V U =∠?
,对于感性负载,由cos 0.8?=,得36.87?=-?,则
A 236.87A I =∠-?
采用单相分析法,如图(b)所示。 电源相电压为
A AN A i [2200236.87(2j4)]V U U I Z =+
=∠?+∠-??+ 2281V =∠?
当负载断开时,电源输出电压为
A 395V
l U ==
答案5.7
解:设电源为星形联接,电源A 相电压相量为
AN
2200V U ==∠?
则电源线电压分别为
AB 38030V U =∠? ,BC 38090V U =∠-? ,CA 380150V U =∠? 。
(1)设电路联接如图(a)所示,化为单相计算,如图(b)所示。
N
'
N N '
U U (b)
AN
' U BN
I
因为负载为星形联接,所以负载相电压
AN'2200V U =∠? ,BN'220120V U =∠-? ,CN'220240V U =∠-? 又因为
(8j6)1036.87Z =+Ω=∠?Ω,
相电流
AN'AN'2236.87A U I Z ==∠-? BN'BN'22156.87A U I Z ==∠-? CN'CN'22276.87A U I Z ==∠-?
电压、电流相量图如图(c)所示。
(2) C 相断线时,
'0
CN I =,电源线电压降落在AB 相上。如图(d)所示。
'
U
N
'
U
AB AN'BN'38030V 19 6.87A
221036.87U I I Z ∠?=-===∠-??∠?Ω AN'BN'19030V U U '=-=∠?
CN'
CA
AN'
380150V 19030V 329120V U
U U =+=∠?+∠?=∠?
(3) C 相负载短路时,如图(e)所示。 AN'BN'AC 380V U U U ===,CN'0
U =
AN'AC AN'3866.87A U U I
Z Z ===∠-? BC BN'38126.97A U I Z ==∠-? CN'AN'BN'65.8283.13A I I I =--=∠?
答案5.8
解:(1)电路模型如图(a)所示。
B
Z (a)
A
B
I (b)
B
(c)
I
图 题7.8
负载相电流
AB AB 13.17A
Z U I ==≈
负载线电流
A A
B 22.81A
I =≈
(2)设A 相负载断路,如图(b)所示。
由图(b)可见,AB 0
I =,B 、C 相负载因相电压不变,均为电源线电压,故相电 流
BC CA C BC A B BC 13.17A 22.81A
13.17A I I I I I I =======
(3)设端线A 断路,如图(c)所示。 由图(c)可见
A 0
I = BC
B C BC
AB CA BC
BC 19.76A
Z 2Z
6.587A 21317A U I I U I I Z
U I Z
==≈==≈=
≈∥
答案5.9
解:电路如图所示:
因为三相负载平均功
率等于每相负载平均功率的3倍,所以
2
A 2334.18cos sin (3.62j2.09)l
U
P Z U Z P
Z Z Z λλ
λ??=??==?≈Ω
=+=+Ω
答案5.10
解: 星形接法时
380V
l U =
,
22A p
l p U I I Z
==
=
==
236380V 22A 0.68687.97W
l P I =?=??=
三角形接法时负载每相承受电压为380V
倍。根据功率与电压的平方成正比关系可知,三角形联接时负载的平均功率是星形联接的3倍。即
38687.9726063.91W P =?=
答案5.11
解:由已知功率因数
cos 0.85?Y =,cos 0.8
??=
可求得星形和三角形负载的阻抗角分别为:
31.24?Y =?,36.87??=? 方法一:
因为负载端线电压
380V
l U =
所以星形负载相电流为
17.77A
I Y ===
星形负载阻抗
12.3531.24Z ?Y Y ===∠?Ω
三角形负载相电流为
10W
10.96A
3cos 3380V 0.8l P k I U ????
====??
三角形负载阻抗
380V 36.8734.6736.8710.96A p l U U Z I I ?===∠?=∠?Ω
将三角形联接等效成星形联接,设负载阻抗为Z ?'
,
3Z Z ??
'=
化为单相分析法,则电路如图 (b)所示。
(b )
设
A N 2200U ''=∠? V,17.7731.24I Y =∠-? ,18.9936.87I '?=∠-? A 17.7731.2418.9936.8736.7634.14I I I 'Y ?=+=∠-?+∠-?=∠-?
A 由KVL 方程得,电源相电压为
AN A A N 227.11V l U I I U ''=?+=∠? 则电源线电压为
AB AN 393.3
U ==V
方法二:
负载总平均功率
210kW=20kW
Y P P
P ?=+=?
负载总无功功率
tg tg (6.0667.5)kW=13.566kvar Y Y Q P P
????=?+?=+
负载总功率因数
0.8276
λ==
因为
l l P I λ=
负载线电流
36.72A
l I ==
电源发出平均功率为
2S 323Re[]
2010W+3(36.72A)0.120404.43W l l P P I Z =+?=???Ω= 无功功率为
2S 323Re[]13.56610W+3(36.72A)0.214374.88var l l Q Q I Z =+?=???Ω= 电源视在功率为
S AB AB 393.3V
l
S I U ===
2aN 38633W P GU =≈
答案5.14
解:设电源电压
AB 0l U U ?=∠
则
BC AB
120120l U U U =∠-?=∠-? 设负载为星形联接,如图(b)所示。
U +- A B C
A
I (b)
阻抗角为,则A 相负载电流滞后电压A U 的角度为?,滞后的角度为
30?+ ,即
A (30)l I I ??=∠--
功率表的读数
BC A cos(120(30))cos(90)sin l l l l P U I U I U I ?????=-?---=
-=
由对称三相负载无功功率的计算公式得
sin var
l l Q I ?===
哈工大电路答案-1
答案1.1 解:图示电路电流的参考方向是从a 指向b 。当时间t <2s 时电流从a 流向b,与参考方向相同,电流为正值;当t >2s 时电流从b 流向a ,与参考方向相反,电流为负值。所以电流i 的数学表达式为 2A 2s -3A 2s t i t ? 答案1.2 解:当0=t 时 0(0)(59e )V 4V u =-=-<0 其真实极性与参考方向相反,即b 为高电位端,a 为低电位端; 当∞→t 时 ()(59e )V 5V u -∞∞=-=>0 其真实极性与参考方向相同, 即a 为高电位端,b 为低电位端。 答案1.3 解:(a)元件A 电压和电流为关联参考方向。元件A 消耗的功率为 A A A p u i = 则 A A A 10W 5V 2A p u i === 真实方向与参考方向相同。 (b) 元件B 电压和电流为关联参考方向。元件B 消耗的功率为 B B B p u i = 则 B B B 10W 1A 10V p i u -===- 真实方向与参考方向相反。 (c) 元件C 电压和电流为非关联参考方向。元件C 发出的功率为 C C C p u i = 则 C C C 10W 10V 1A p u i -===-
真实方向与参考方向相反。 答案1.4 解:对节点列KCL 方程 节点③: 42A 3A 0i --=,得42A 3A=5A i =+ 节点④: 348A 0i i --+=,得348A 3A i i =-+= 节点①: 231A 0i i -++=,得231A 4A i i =+= 节点⑤: 123A 8A 0i i -++-=,得123A 8A 1A i i =+-=- 若只求2i ,可做闭合面如图(b)所示,对其列KCL 方程,得 28A-3A+1A-2A 0i -+= 解得 28A 3A 1A 2A 4A i =-+-= (b) 答案1.5 解:如下图所示 (1)由KCL 方程得 节点①: 12A 1A 3A i =--=- 节点②: 411A 2A i i =+=- 节点③: 341A 1A i i =+=- 节点④: 231A 0i i =--= 若已知电流减少一个,不能求出全部未知电流。 (2)由KVL 方程得
哈工大机械原理课程设计
Harbin Institute of Technology 机械原理课程设计说明书 课程名称:机械原理 设计题目:产品包装生产线(方案1) 院系:机电学院 班级: 设计者: 学号: 指导教师: 设计时间:
一、绪论 机械原理课程设计是在我们学习了机械原理之后的实践项目,通过老师和书本的传授,我们了解了机构的结构,掌握了机构的简化方式与运动规律,理论知识需要与实践相结合,这便是课程设计的重要性。我们每个人都需要独立完成一个简单机构的设计,计算各机构的尺寸,同时还需要编写符合规范的设计说明书,正确绘制相关图纸。 通过这个项目,我们应学会如何收集与分析资料,如何正确阅读与书写说明书,如何利用现代化的设备辅助工作。这种真正动手动脑的设计有效的增强我们对该课程的理解与领会,同时培养了我们的创新能力,为以后机械设计课程打下了坚实的基础。 二、设计题目 产品包装生产线使用功能描述 图中所示,输送线1上为小包装产品,其尺寸为长?宽?高=600?200?200,小包装产品送至A处达到2包时,被送到下一个工位进行包装。原动机转速为1430rpm,每分钟向下一工位可以分别输送14,22,30件小包装产品。 产品包装生产线(方案一)功能简图 三、设计机械系统运动循环图 由设计题目可以看出,推动产品在输送线1上运动的是执行构件1,在A处把产品推到下一工位的是执行构件2,这两个执行构件的运动协调关系如图所示。 ?1?1 执行构件一 执行构件二 ?01?02 运动循环图
图中?1 是执行构件1的工作周期,?01 是执行构件2的工作周期,?02是执行构件2的动作周期。因此,执行构件1是做连续往复运动,执行构件2是间歇运动,执行构件2的工作周期?01 是执行构件1的工作周期T1的2倍。执行构件2的动作周期?02则只有执行构件1的工作周期T1的二分之一左右。 四、 设计机械系统运动功能系统图 根据分析,驱动执行构件1工作的执行机构应该具有的运动功能如图所示。运动功能单元把一个连续的单向传动转换为连续的往复运动,主动件每转动一周,从动件(执行构件1)往复运动一次,主动件转速分别为14,22,30rpm 14,22,30rpm 执行机构1的运动功能 由于电动机的转速为1430rpm ,为了在执行机构1的主动件上分别得到14、22、30rpm 的转速,则由电动机到执行机构1之间的总传动比i z 有3种,分别为 i z1= 141430 =102.14 i z2=221430=65.00 i z3=30 1430=47.67 总传动比由定传动比i c 和变传动比i v 两部分构成,即 i z1=i c i v1 i z2=i c i v2 i z3=i c i v3 3种总传动比中i z1最大,i z3最小。由于定传动比i c 是常数,因此,3种变传动比中i v1最大,i v3最小。为满足最大传动比不超过4,选择i v1 =4 。 定传动比为 i c = v1 z1i i =4102.14=25.54 变传动比为 i v2= c z2i i =54.2565=2.55 i v3= c z3i i =54 .2547.67=1.87 传动系统的有级变速功能单元如图所示。 i=4,2.55,1.87 有级变速运动功能单元
电路理论基础课后答案解析(哈工大陈希有)第11章
题11.1 根据定义求 和的象函数。 解: (1) (2) 题11.2 设 求的象函数。 解: 由拉氏变换的微分、线性和积分性质得: 题11.3 设 (t 为纯数)。分别求对应象函数、、,验证卷积定理。 解: 设 , 则 与的卷积为 )()(t t t f ε=)(e )(t t t f at ε-=2020 001e 1e 1e e )()(- s s dt s s t dt t t s F st st st st =-=+-==∞-∞-∞-∞ -- - - ??ε 20)(20 )(00) (1e )(1e 1e e )(e )(-ααααεααα+=+-=+++-==∞ +-∞+-∞-∞-----??s s dt s s t dt t t s F t s t s st st t ξ ξετd f c t bf t t f a t f f t A t f t t )()(d )(d )(,0)0(),()e 1()(01 11 21/1?-++==-=--)(2t f )(2s F ) /1(//1)(1 τττ+=+-=s s A s A s A s F ) /1(/ )()()/(]/)([)()]0()([)(2 2 111112τ τ+++=++=++-=-s s A c bs as s F s c b as s s F c s bF f s sF a s F )()()(,e 2)(,e 5)(2 15221t f t f t f t f t f t t *===--)(1s F )(2s F )(s F 25)}({)(1 1+==s t f s F L 5 2 )}({)(2 2+==s t f L s F ) 5)(2(10 )()(2 1++=s s s F s F )(1t f )(2t f
电路理论基础课后答案(哈工大陈希有)第9章
答案9.1 解:由分压公式得: U U H R /)(j =ωRC RC C R R ωωωj 1j )j /(1+=+= )j (ωH 具有高通特性,令2 1 )j (c =ωH 得 截止频率RC 1 c =ω,通带范围为∞~c ω 答案9.2 解:由阻抗并联等效公式得: Ω+=+=---3 3 636310 j 110)10j /(110)10j /(10)j (ωωωωZ 阻抗模及幅角分别为: 2 33 )10(110)j (ωω-+= Z , )10arctan()(3ωωθ--= 令 2/1)j (c =ωZ 求得截止角频率rad/s 103c =ω,故通带及阻带分别为: 通带=ω0~rad/s 103,阻带=ωrad/s 103~∞。幅频特性和相频特性如图(b)和(c)所示。 (b) -- 答案9.3 解:等效输入阻抗 )1() j j ()j 1j ()(j j j j )j (1221212122 11C R LR C L R R C L R R C L R R C R C R L R L R Z ωωωωωωωωω++++++=-++?= 取极端情况,令0=ω,得20)j (R Z ==ωω; 令∞→ω,得1)j (R Z =∞→ωω。由)j (ωZ 不随频率变化得R R R ==21,式(1)简化为
)j 1j () j 1j (2 )j 1j ()j 1j (2)j (22 C L R C L R C L R C L R C L R C L R C L R C L R Z ωωωωωωωωω+++++=+++++= 由)j (ωZ 为实数得: C L R R C L R R C L =+=2,2 故当C L R R ==21时端口电流与端口电压的波形相似,此时C L Z =)j (ω。 答案9.4 解: RC 并联的等效阻抗 RC R C R C R Z RC ωωωj 1j /1j /+=+= RC RC Z L Z U U H +==ωωj /)j (1 2 R L LC RC L R R /j 11 )j 1(j 2 ωωωω+-=++= 幅频特性 2 22) /()1(1 )j (R L LC H ωωω+-= 当0→ω时,1)j (=ωH ;当∞→ω时,0)j (=ωH 所以它具有低通特性。 答案9.5 解:由KVL 及分压公式得 1 db cb 2)j 1j 1j 1(U C R R C R C U U U ωωω+-+=-= 整理得 RC RC U U H ωωωj 1j 1)j (1 2+-= = 其幅频特性 1) (1)(1)j (2 2 22=++= RC RC H ωωω 相频特性 )arctg(2)(RC ωω?-= 当ω从0变到∞时,)(ω?从0变化到π-。 注释:图中电路幅频特性为常量,与频率无关,具有全通特性,常用作移相。 答案9.6 解:设
哈工大机械原理大作业_凸轮机构设计(第3题)
机械原理大作业二 课程名称:机械原理 设计题目:凸轮设计 院系:机电学院 班级: 1208103 完成者: xxxxxxx 学号: 11208103xx 指导教师:林琳 设计时间: 2014.5.2
工业大学 凸轮设计 一、设计题目 如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(6 50π?≤ ≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,6 50π =Φ带入正弦加速度运动规律的升程段方程式中得: ??? ?? ???? ??-=512sin 215650?ππ?S ;
?? ? ?????? ??-= 512cos 1601ππωv ; ?? ? ??= 512sin 1442 1?π ωa ; 2、凸轮推杆推程远休止角运动方程( π?π ≤≤6 5) mm h s 50==; 0==a v ; 3、凸轮推杆回程运动方程(9 14π ?π≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,9 5'0π= Φ,6 s π = Φ带入余弦加速度运动规律的回程段方程式中得: ?? ? ???-+=)(59cos 125π?s ; ()π?ω--=59 sin 451v ; ()π?ω-=59 cos 81-a 21; 4、凸轮推杆回程近休止角运动方程(π?π 29 14≤≤) 0===a v s ; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。 ①位移线图 编程如下: %用t 代替转角 t=0:0.01:5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6:0.01:pi; s=50; hold on plot(t,s); t=pi:0.01:14*pi/9; s=25*(1+cos(9*(t-pi)/5));
电路基本理论课后答案(哈工大版)第10章
答案10.1 解:0
Ω6电阻电压为: V e 72.0)d d (66)(101t C t u C i t u -=-?Ω-=?Ω-=)0(>t 答案10.4 解:0
哈工大机械原理试卷
一.填空题(本大题共7小题,每空1分, 共15分) 1. 按照两连架杆可否作整周回转,平面连杆机构分为 、 和 。 2. 平面连杆机构的 角越大,机构的传力性能越好。 3. 运动副按接触形式的不同,分为 和 。 4.直齿圆柱齿轮正确啮合条件是两齿轮的 和 分别相等。 5. 凸轮从动件按其端部的形状可分为 从动件、 从动件和 从动件动件。 6. 机构具有确定运动的条件是: 。 7.通过将铰链四杆机构的转动副之一转化为移动副时,则可得到具有移动副的 机构、 机构、摇块机构和 机构。 二.选择题(本大题共15小题,每小题1分,共15分) 1. 要实现两相交轴之间的传动,可采用 传动。 A .直齿圆柱齿轮 B .斜齿圆柱齿轮 C .直齿锥齿轮 D .蜗杆蜗轮 2. 我国标准规定,对于标准直齿圆柱齿轮,其ha*= 。 A .1 B .0.25 C .0.2 D .0.8 3. 在机械传动中,若要得到大的传动比,则应采用 传动。 A. 圆锥齿轮 B. 圆柱齿轮 C. 蜗杆 D. 螺旋齿轮 4. 当四杆机构处于死点位置时,机构的压力角为 。 A .0° B .90° C .45° D .15° 5. 一般情况凸轮机构是由凸轮、从动件和机架三个基本构件组成的 机构。 A .转动副 B .移动副 C .高副 D .空间副 6. 齿轮的渐开线形状取决于它的 直径。 A .齿顶圆 B .分度圆 C .基圆 D .齿根圆 7. 对于滚子从动件盘形凸轮机构,滚子半径 理论轮廓曲线外凸部分的最小曲率半径。 A .必须小于 B .必须大于 C .可以等于 D .与构件尺寸无关 8. 渐开线直齿圆柱齿轮中,齿距p ,法向齿距n p ,基圆齿距b p 三者之间的关系为 。 A.p p p n b <= B.p p p n b << C.p p p n b >> D. p p p n b => 9. 轻工机械中常需从动件作单向间歇运动,下列机构中不能实现该要求的是 。 A.棘轮机构 B.凸轮机构 C.槽轮机构 D.摆动导杆机构 10. 生产工艺要求某机构将输入的匀速单向转动,转变为按正弦规律变化的移动输出,一种可供选择的机构是 。
哈工大电路习题答案第08章
答案8.1 解: )/1()(T t A t f -= T t <<0 ??-== T T dt T t A T dt t f T A 000)/1(1)(1A T t t T A T 5.0]2[02=-= ?-=T k dt t k T t A T a 0 )cos()/1(2ω 0)sin(2)]sin()/1(2[0 20=+?-=?T T dt t k T k A t k Tk T t A ωωωω ?-=T k dt t k T t A T b 0 )sin()/1(2ω π ωωωωωk A kT A dt t k T k A t k Tk T t A T T ==-?--=?2)cos(2)]cos()/1(2[020 所以 ∑ ∞ =+=1 sin 5.0)(k t k k A A t f ωπ 频谱图如图(b)所示。 .0 答案8.2 解:电流i 的有效值 57.1)2/13.0()2/67.0()2/57.1(12222≈+++=I A 只有基波电流与正弦电压形成平均功率,故二端电路输入的平均功率为: 95.73)]90(90cos[2 57 .122.94=?--?-?= P W 注释:非正弦周期量分解成傅里叶级数后,其有效值等于直流分量和不同频 率交流分量有效值平方和的平方根。 答案8.3 解:对基波 ?∠=0100m(1)U V , A 010m(1) ?∠=I 由
Ω==-+=10)1(j ) 1(m ) 1(m ) 1(I U C L R Z ωω 求得 Ω=10R , 01 =-C L ωω (1) 对三次谐波 ?-∠=3050m(3)U V , A 755.1i m(3)ψ-∠=I 又由 Ω+?-∠==-+=)30(5.28)313(j m(3) m(3)) 3(i I U C L R Z ψωω (2) 所以 22 25.28)313(=- +C L R ωω (3) 将式(1)代入式(3), 解得 mH 9.31=L 将mH 9.31=L 代入式( 1 ),求得 F 3.318μ=C 再将C L R 、、 值代入式(2),有 Ω?-∠=Ω+=3028.5j26.7)10(i )3(ψZ 解得 ?=45.99i ψ 答案8.4 解: (1) 电压有效值: V 01.80)225()250()2100(222=++=U 电流有效值 58.74mA )2 10 ()220()280( 222=++=I (2) 平均功率 kW 42.345cos 2 10250cos 22050)45cos(280100=??+??+?-?=P
电路理论基础A第五章(哈工大)答案
答案5.1 设负载线电流分别为A B C i i i 、、,由KCL 可得A B C 0I I I = ++。又A B C 10A I I I ===, 则A B C i i i 、、的相位彼此相差120?,符合电流对称条件,即线电流是对称的。 但相电流不一定对称。例如,若在三角形负载回路内存在环流0I (例如,按三角形联接的三相变压器),则负载相电流不再对称,因为 0CA CA 0BC BC 0AB AB ',','I I I I I I I I I +=+=+= 不满足对称条件。而该环流对线电流却无影响,因为每个线电流都是两个相电流之差(如图题7.3),即 BC CA BC CA C AB BC AB BC B CA AB CA AB A '','',''I I I I I I I I I I I I I I I -=-=-=-=-=-= A B C 图 题7.3 如已知负载对称,则相电流也是对称的,每相电流为77.53/10≈A 。 答案5.2 负载各相阻抗化为星形联接为 (8j6)'33Z Z -==Ω 设A 相电源相电压为2200∠ ,A 相负载线电流与电源相电流相等 AN A 220082.50A (8j6)Z 'j2 3l U I Z ∠? ===∠-Ω +Ω+ 由三角形联接得相电流与线电流关系得 A'B'47.6A I === 即负载相电流为47.6A 。 答案5.3 解:电路联接关系如图(a)所示。负载断开时电源的输出线电压等于图中相电压 倍。下面计算相电压A U 。
A I (b) I C (a)U 设负载A 相电压为AN 2200V U =∠? ,对于感性负载,由cos 0.8?=,得36.87?=-?,则 A 236.87A I =∠-? 采用单相分析法,如图(b)所示。 电源相电压为 A AN A i [2200236.87(2j4)]V U U I Z =+ =∠?+∠-??+ 2281V =∠? 当负载断开时,电源输出电压为 A 395V l U == 答案5.7 解:设电源为星形联接,电源A 相电压相量为 AN 2200V U ==∠? 则电源线电压分别为 AB 38030V U =∠? ,BC 38090V U =∠-? ,CA 380150V U =∠? 。 (1)设电路联接如图(a)所示,化为单相计算,如图(b)所示。 N ' N N ' U U (b) AN ' U BN BN I 因为负载为星形联接,所以负载相电压 AN'2200V U =∠? ,BN'220120V U =∠-? ,CN'220240V U =∠-? 又因为
理论力学复习题及答案(哈工大版)汇总
一、是非题 1、力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。 (√) 2、在理论力学中只研究力的外效应。(√) 3、两端用光滑铰链连接的构件是二力构件。(×) 4、作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同, 大小相等,方向相反。(√) 5、作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。(×) 6、三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。(×) 7、平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。 (√) 8、约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。(×) 9、在有摩擦的情况下,全约束力与法向约束力之间的(应是最大)夹角称为摩擦角。(×) 10、用解析法求平面汇交力系的平衡问题时,所建立的坐标系x,y轴一定要相互垂直。 (×) 11、一空间任意力系,若各力的作用线均平行于某一固定平面,则其独立的平衡方程最多只有3个。 (×) 12、静摩擦因数等于摩擦角的正切值。(√) 13、一个质点只要运动,就一定受有力的作用,而且运动的方向就是它受力方向。(×) 14、已知质点的质量和作用于质点的力,质点的运动规律就完全确定。(×) 15、质点系中各质点都处于静止时,质点系的动量为零。于是可知如果质点 系的动量为零,则质点系中各质点必都静止。(×) 16、作用在一个物体上有三个力,当这三个力的作用线汇交于一点时,则此力系必然平衡。 (×) 17、力对于一点的矩不因力沿其作用线移动而改变。(√) 18、在自然坐标系中,如果速度υ= 常数,则加速度α= 0应是切线方向加速度为零。(×) 19、设一质点的质量为m,其速度 与x轴的夹角为α,则其动量在x轴上的投影为mvx =mvcos a。(√) 20、用力的平行四边形法则,将一已知力分解为F1和F2两个分力,要得到唯一解答,必须具备:已知 F1和F2两力的大小;或已知F1和F2两力的方向;或已知F1或F2中任一个力的大小和方向。 ( √) 21、某力在一轴上的投影与该力沿该坐标轴的分力其大小相等,故投影就是分力。 ( ×) 22、图示结构在计算过程中,根据力线可传性原理,将力P由A点传至B点,其作用效果不变。 (×)
哈工大电路答案第11章
答案11.1 解: (1) 2020 00 1 e 1e 1e e )()(- s s dt s s t dt t t s F st st st st = -=+ -==∞-∞-∞-∞-- - - ??ε (2) 2 0)(2 0)(00)(1e )(1e 1e e )(e )(-ααα αεααα+= +-=++ +- ==∞+-∞ +-∞-∞ --- - - ? ?s s dt s s t dt t t s F t s t s st st t 答案11.2 解: ) /1(//1)(1τττ+=+-= s s A s A s A s F 由拉氏变换的微分、线性和积分性质得: ) /1(/)()()/(]/)([)()]0()([)(22111112ττ +++= ++=++-=-s s A c bs as s F s c b as s s F c s bF f s sF a s F 答案11.3 解: 设25)}({)(11+==s t f s F L ,5 2)}({)(22+==s t f L s F 则 ) 5)(2(10 )()(21++= s s s F s F )(1t f 与)(2t f 的卷积为 ) e e (3 10 ]e 31[e 10e e 10e 2e 5)(*)(520350350)(5221t t t t t t t t d d t f t f --------=?==?=??ξξ ξξξξ 对上式取拉氏变换得: ) 5)(2(10)5121(310)}(*)({21++=+-+= s s s s t f t f L 由此验证 )()()}(*)({2121s F s F t f t f =L 。 答案11.4
哈工大机械原理大作业
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业一 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机电学院 班级:1208105 分析者:殷琪 学号: 指导教师:丁刚 设计时间: 哈尔滨工业大学 设计说明书 1 、题目 如图所示机构,一只机构各构件的尺寸为AB=100mm,BC=,CE=,BE=,CD=,AD=,AF=7AB,DF=,∠BCE=139?。构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、机构结构分析
该机构由6个构件组成,4和5之间通过移动副连接,其他各构件之间通过转动副连接,主动件为杆1,杆2、3、4、5为从动件,2和3组成Ⅱ级RRR 基本杆组,4和5组成Ⅱ级RPR 基本杆组。 如图建立坐标系 3、各基本杆组的运动分析数学模型 1) 位置分析 2) 速度和加速度分析 将上式对时间t 求导,可得速度方程: 将上式对时间t 求导,可得加速度方程: RRR Ⅱ级杆组的运动分析 如下图所示 当已知RRR 杆组中两杆长L BC 、L CD 和两外副B 、D 的位置和运动时,求内副C 的位置、两杆的角位置、角运动以及E 点的运动。 1) 位置方程 由移项消去j ?后可求得i ?: 式中, 可求得j ?: E 点坐标方程: 其中 2) 速度方程 两杆角速度方程为 式中, 点E 速度方程为 3) 加速度方程 两杆角加速度为 式中, 点E 加速度方程为 RPR Ⅱ级杆组的运动分析 (1) 位移方程 (2)速度方程 其中 (3)加速度方程 4、 计算编程 利用MATLAB 软件进行编程,程序如下: % 点B 和AB 杆运动状态分析 >>r=pi/180; w 1=10; e 1=0; l 1=100; Xa=0; Ya=0;
哈工大电路习题答案第3章
答案3.1 解:应用置换定理,将电阻R 支路用0.5A I =电流源代替,电路如图(b)所示。 I 2 对电路列节点电压方程: 1212(1)0.5A 44n n I U U +Ω?-=-ΩΩ 12116V (1)3 4.5 4.5n n U U -+Ω++?= ΩΩΩ 0.5A I = 解得 11V n U = 则 12n U R I ==Ω 答案3.2 解: (a ) 本题考虑到电桥平衡,再利用叠加定理,计算非常简单。 (1)3V 电压源单独作用,如图(a-1)、(a-2)所示。 (a-1)(a-2) 由图(a-2)可得 '3V 1A 148348 I ==?Ω+Ω+ 由分流公式得: ''182 A 483 I I Ω=-?=-Ω+Ω (2)1A 电流源单独作用,如图(a-3)所示。
(a-3) 考虑到电桥平衡, "0I =, 在由分流公式得: "113 1A A 134I =-?=-+ (3)叠加: '"1A I I I =+= '"11117/12A I I I =+=- 2 111 2.007W P I Ω=?= (b ) (1)4V 电压源单独作用,如图(b-1)所示。 '2 I ' (b-1) 由图(b-1)可得, '24V 2V (2+2)U Ω?= =Ω '136A I U =-=- ''21'5A I I I =+=- (2)2A 电流源单独作用,如图(b-2)所示。
(b-2) ''22 2A=2V 22U ?= Ω?+ "'' 2311A 2 I I =?= 对节点②列KCL 方程得, """1132A 4A I U I +== 对节点③列KCL 方程得, "" "230I I U ++= 解得 "5A I = (3) 叠加 '"1116A 4A=10A I I I =+=--- '"5A 5A=10A I I I =+=-- - 211 1100W P I Ω=?Ω= 答案3.3 解 :利用叠加定理,含源电阻网络中的电源分为一组,其作用为'I ,如图(b)所示。S I 为一组,其单独作用的结果I '' 与S I 成比例,即:" S I kI =,如图(c)所示。 I I s kI (a) (b) (c) + '"'S I I I I kI =+=+ (1) 将已知条件代入(1)式得 '' 04A 1A 2A I k I k ?=+?? ?-=+???
哈工大机械原理课程—产品包装线方案9
哈工大机械原理课程—产品包装线方案9
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:机械原理课程设计 设计题目:产品包装生产线(方案9) 院系:机电工程学院 班级: 设计者: 学号: 指导教师:陈明 设计时间:2013.07.01-2013.07.05
哈尔滨工业大学 目录 一.题目要求 (3) 二.题目解答 1.工艺方法分析 (3) 2.运动功能分析及图示 (4) 3.系统运动方案的拟定 (8) 4.系统运动方案设计 (13) 5.运动方案执行构件的运动时序分析 (19) 6.运动循环图 (21)
产品包装生产线(方案9) 1.题目要求 如图1所示,输送线1上为小包装产品,其尺寸为长*宽*高=500*200*200,采取步进式输送方式,将第一包和第二包产品送至托盘A上(托盘A上平面与输送线1的上平面同高),每送一包产品至托盘A上,托盘A下降200mm。当第三包产品送到托盘A上后,托盘A上升405mm、顺时针旋转90°,把产品推入输送线2。然后,托盘A逆时针回转90°、下降5mm恢复至原始位置。原动机转速为1430rpm,产品输送量分三档可调,每分钟向输送线2分别输送6、12、18件小包装产品。 图1功能简图
2.题目解答 (1)工艺方法分析 由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1,在A处使产品上升、转位的是执行构件2,在A处把产品推到下一个工位的是执行构件3,三个执行构件的运动协调关系如图所示。 下图中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期,T3’是执行构件3的动作周期。由图2可以看出,执行构件1是作连续往复移动的,而执行构件2则有一个间歇往复运动和一个间歇转动,执行构件3作一个间歇往复运动。三个执行构件的工作周期关系为:3T1= T2= T3。执行构件3的动作周期为其工作周期的1/20。 图2 运动循环图 (2)运动功能分析及运动功能系统图 根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如
哈工大机械原理大作业
连杆的运动的分析 一.连杆运动分析题目 图1-13 连杆机构简图 二.机构的结构分析及基本杆组划分 1.。结构分析与自由度计算 机构各构件都在同一平面内活动,活动构件数n=5, PL=7,分布在A、B、C、E、F。没有高副,则机构的自由度为 F=3n-2PL-PH=3*5-2*7-0=1 2.基本杆组划分 图1-13中1为原动件,先移除,之后按拆杆组法进行拆分,即可得到由杆3和滑块2组成的RPR II级杆组,杆4和滑块5组成的RRP II级杆组。机构分解图如下:
图二 图一 图三 三.各基本杆组的运动分析数学模型 图一为一级杆组, ? c o s l A B x B =, ? sin lAB y B = 图二为RPR II 杆组, C B C B j j B E j B E y y B x x A A B S l C E y x S l C E x x -=-==-+=-+=0000 )/a r c t a n (s i n )(c o s )(?? ? 由此可求得E 点坐标,进而求得F 点坐标。 图三为RRP II 级杆组, B i i E F i E F y H H A l E F A l E F y y l E F x x --==+=+=111)/a r c s i n (s i n c o s ??? 对其求一阶导数为速度,求二阶导数为加速度。
lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; yC=-350; A0=xB-xC; B0=yB-yC; S=sqrt(A0.^2+B0.^2); zj=atan(B0/A0); xE=xB+(lCE-S)*cos(zj); yE=yB+(lCE-S)*sin(zj); a=0:0.0001:20/255; Xe=subs(xE,t,a); Ye=subs(yE,t,a); A1=H-H1-yB; zi=asin(A1/lEF); xF=xE+lEF*cos(zi); vF=diff(xF,t); aF=diff(xF,t,2); m=0:0.001:120/255; xF=subs(xF,t,m); vF=subs(vF,t,m); aF=subs(aF,t,m); plot(m,xF) title('位移随时间变化图像') xlabel('t(s)'),ylabel(' x') lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0;
哈工大理论力学期末考试及答案
三、计算题(本题10分) 图示平面结构,自重不计,B 处为铰链联接。已知:P = 100 kN ,M = 200 kN ·m ,L 1 = 2m ,L 2 = 3m 。试求支座A 的约束力。 四、计算题(本题10分) 在图示振系中,已知:物重Q ,两并联弹簧的刚性系数为k 1与k 2。如果重物悬挂的位置使两弹簧的伸长相等,试求:(1)重物振动的周期;(2)此并联弹簧的刚性系数。 五、计算题(本题15分) 半径R =0.4m 的轮1沿水平轨道作纯滚动,轮缘上A 点铰接套筒3,带动直角杆2作上下运动。已知:在图示位置时,轮心速度C v =0.8m/s ,加速度为零,L =0.6m 。试求该瞬时:(1)杆2的速度2v 和加速度2a ;(2)铰接点A 相对于杆2的速度r v 和加速度r a 。 六、计算题(本题15分) 在图示系统中,已知:匀质圆盘A 和B 的半径各为R 和r ,质量各为M 和m 。试求:以φ和θ为广义坐标,用拉氏方程建立系统的运动微分方程。
七、计算题(本题20分) 在图示机构中,已知:纯滚动的匀质轮与物A 的质量均为m ,轮半径为r ,斜面倾角为β,物A 与斜面的动摩擦因数为'f ,不计杆OA 的质量。试求:(1)O 点的加速度;(2)杆OA 的内力。 答案 三、解,以整体为研究对象,受力如图所示。 由()0C M F =∑ 11222(2)20A x A y P L F L L F L M ?-?--?-= ……(1) 再以EADB 为研究对象受力如图所示, 由12()0 0B Ax Ay M F F L F L M =?-?-=∑ (2)
(完整版)哈工大模电习题册答案
【2-1】 填空: 1.本征半导体是 ,其载流子是 和 。两种载流子的浓度 。 2.在杂质半导体中,多数载流子的浓度主要取决于 ,而少数载流子的浓度则与 有很大关系。 3.漂移电流是 在 作用下形成的。 4.二极管的最主要特征是 ,与此有关的两个主要参数是 和 。 5.稳压管是利用了二极管的 特征,而制造的特殊二极管。它工作在 。描述稳压管的主要参数有四种,它们分别是 、 、 、和 。 6.某稳压管具有正的电压温度系数,那么当温度升高时,稳压管的稳压值将 。 1. 完全纯净的半导体,自由电子,空穴,相等。 2. 杂质浓度,温度。 3. 少数载流子,(内)电场力。 4. 单向导电性,正向导通压降U F 和反向饱和电流I S 。 5. 反向击穿特性曲线陡直,反向击穿区,稳定电压(U Z ),工作电流(I Emin ),最大管耗(P Zmax )和动态电阻(r Z ) 6. 增大; 【2-2】电路如图2.10.4所示,其中u i =20sinωt (mV),f =1kHz ,试求二极管VD 两端电压和通过它的电流。假设电容C 容量足够大。 - +- +C R +k 5ΩV 6i u VD +- D u D i a) ( 图2.10.4 题2-5电路图 1.静态分析 静态,是指u i =0,这时u i 视作短路,C 对直流视作开路,其等效电路如图1.4.2(a)所示。不妨设U D =0.6V 则 D D 6V (60.6)V 1.08mA 5k U I R --= ==Ω 对于静态分析,也可以根据二极管的伏安特性曲线,用图解法求解。 2.动态分析 对于交流信号,直流电源和电容C 视作短路;二极管因工作在静态工作点附近很小的范 围内,故可用动态电阻r d 等效,且D d D 1i r u ?=?,由此可得等效电路如图1.4.2(b)所示。 二极管伏安特性方程: )1e (T D /S D -=U u I i (1.4.1) 由于二极管两端电压U D ?U T =26 mV ,故式1.4.1可简化为: T D /S D e U u I i ≈ T D D D d d d 1U I u i r ≈=
哈工大机械原理大作业一12题
机械原理大作业(一) 作业名称:机械原理 设计题目:连杆机构运动分析 院系:机电工程学院 班级: 设计者: 学号: 指导教师: 设计时间: 2014年6月3日 哈尔滨工业大学机械设计
连杆机构运动分析 (12)题:图1-12所示的六连杆机构中,各构件尺寸分别为:AB l =200mm ,BC l =500mm ,CD l =800mm ,F x =400mm ,D x =350mm , D y =350mm ,1 =100rad/s ,求构件5上的F 点的位移、速度和加速度。 1.建立直角坐标系 以F 点为直角坐标系的原点建立直角坐标系X-Y ,如下图所示。
2.机构结构分析 该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、3)、II级杆组PRP(杆5、滑块4)组成。 3.各基本杆组运动分析 1.I级杆组RR(原动件AB) 已知原动件AB的转角 ?2 π = ~ 原动件AB的角速度 ω = 10 rad/ s
原动件AB 的角加速度 =α 运动副A 的位置 0,400=-=A A y x 运动副A 的速度 0,0==A A v v 运动副A 的加速度 0,0==A A a a 可得: )cos(?AB A B l x x += )sin(?AB A B l y y += 速度和加速度分析: )sin(???-=AB xA xB l w v v ) sin(???+=AB yA yB l w v v )sin()cos(2??AB AB xA xB el l w a a --= )()s i n (2??c o a el l w a a AB AB yA yB +-= 2.II 级杆组RRR (杆2、3) 杆2的角位置、角速度、角加速度
哈工大模电期末考试题及答案
一、 填空(16分) 1、在电流控制方式上,双极型晶体管是__电流控制电流源____型,而场效应管是__电压控制电流源___型;二者比较,一般的由_____场效应管___构成的电路输入电阻大。 2、放大电路中,为了不出现失真,晶体管应工作在___放大___区,此时发射结___正偏______,集电结___反偏______。 3、负反馈能改善放大电路性能,为了提高负载能力,应采用___电压___型负反馈,如果输入为电流源信号,宜采用___并联___型负反馈。 4、正弦波振荡电路应满足的幅值平衡条件是___AF=1____。RC 振荡电路、LC 振荡电路及石英晶体振荡电路中,___石英晶体振荡电路___的频率稳定性最好。 5、直流电源的组成一般包括变压器、_整流电路__、_滤波电路_和_稳压电路_。 6、下列说法正确的画√,错误的画× (1)放大电路的核心是有源器件晶体管,它能够实现能量的放大,把输入信号的能量放大为输出信号的能量,它提供了输出信号的能量。 ( × ) (2)共集组态基本放大电路的输入电阻高,输出电阻低,能够实现电压和电流的放大。 ( × ) (3)图1所示的文氏桥振荡电路中,对于频率为01 2f RC π=的信号,反馈信 号U f 与输出信号U o 反相,因此在电路中引入了正反馈环节,能产生正弦波振荡。 ( × ) 第 1 页 (共 8 页) 图1
试 题: 班号: 姓名: 二、(18分)基本放大电路及参数如图2所示,U BE =0.7V ,R bb ’=300?。回答下列各问: (1) 请问这是何种组态的基本放大电路?(共射、共集、共基) (2) 计算放大电路的静态工作点。 (3) 画出微变等效电路。 (4) 计算该放大电路的动态参数:u A ,R i 和R o (5) 若观察到输出信号出现了底部失真,请问应如何调整R b 才能消除失真。 图2 答:(1)是共射组态基本放大电路 (1分) (2)静态工作点Q : Vcc=I BQ *R b +U BEQ +(1+β) I BQ *R e ,即15= I BQ *200k ?+0.7V+51* I BQ *8k ?, ∴I BQ =0.0235mA (2分) ∴I CQ =βI BQ =1.175mA , (2分) ∴U CEQ =V cc-I CQ *R C -I EQ *R E ≈V cc-I CQ *(R C +R E )=15-1.175*10=3.25V (2分) (3)微变等效电路 o (4分) (4)r be =r bb ’+(1+β)U T /I EQ =0.2+51*26/1.175=1.33K ? A u =-β(R c //R L )/r be =-50*1.32/1.33=-49.6 (2分) Ri=R b //r be ≈1.33K ?; (2分) Ro ≈Rc=2K ? (2分) (5)是饱和失真,应增大R b (1分)