基于VC++的GDI常用坐标系统及应用
基于VC++的GDI常用坐标系统及应用
作者:佚名 点击数:10210 文章来源:天极 更新时间:2006-1-6
在Windows应用程序中,只要进行绘图,就要使用GDI坐标系统。Windows提供了几种映射方式,每一种映射都对应着一种坐标系。例如,绘制图形时,必须给出图形各个点在客户区的位置,其位置用x 和y两个坐标表示,x 表示横坐标,y表示纵坐标。在所有的G DI绘制函数中,这些坐标使用的是一种“逻辑单位”。当GDI函数将结果输出送到某个物理设备上时,Windows将逻辑坐标转换成设备坐标(如屏幕或打印机的像素点)。本文讨论了图形环境中的各个映射模式,包括它们是什么,怎么工作的,以及它们真正的含义。
一、基础知识
(一)逻辑坐标。逻辑坐标与设备无关,缺省地,一个逻辑单位等于设备中的一个象素。它是实现“所见即所得”的基础。例如,当程序员调用LineTo函数绘制25.4mm(1 英 寸)长的直线时,他只要使用合适的映射模式,那么就并不需要考虑输出的是何种设备。若设备是VGA显示器,Windows自动将其转化为96个像素点;若设备是一个300dpi的激光打印机,Windows自动将其转化为300 个像素点。
(二)设备坐标。图形输出时,Windows将GDI函数中指定的逻辑坐标映射为设备坐标,在所有的设备坐标系统中,单位以像素点为准,水平值从左到右增大(正方向向右),垂直值从上到下增大(正方向向下)。Windows中包括以下3 种设备坐标,以满足各种不同需要:
1、客户区域坐标,包括应用程序的客户区域,客户区域的左上角为(0, 0)。
2、屏幕坐标,包括整个屏幕,屏幕的左上角为(0, 0)。屏幕坐标用在WM_MOVE消息中(对于非子窗口)以及下面的Windows 函数中:CreateWindow 和MoveWindow(都对于非子窗口)、GetMessage、GetCursorPos、GetWindowRect、WindowFromPoint 和SetBrush Org 中。 用函数ClientToScreen 和ScreenToClient可以将客户区域坐标转换成屏幕区域坐标,或反之。
3、全窗口坐标,包括一个程序的整个窗口,包括标题条、菜单、滚动条和窗口框,窗口的左上角为(0,0)。使用GetWindowDC得到的窗口设备环境,可以将逻辑单位转换成窗口”坐标。
(三)映射。映射方式定义了Windows如何将GDI函数中指定的逻辑坐标映射为设备坐标。在下文中我们将介绍常用的映射方式。
此外,习惯上,我们将逻辑坐标所在的坐标系称为“窗口”;将设备坐标所在的坐标系称为“视口”。“窗口”依赖于逻辑坐标,可以是像素点、毫米或其他尺度。这一点请牢记,这对于下面的有关内容的理解至关重要。
二、默认的坐标系统
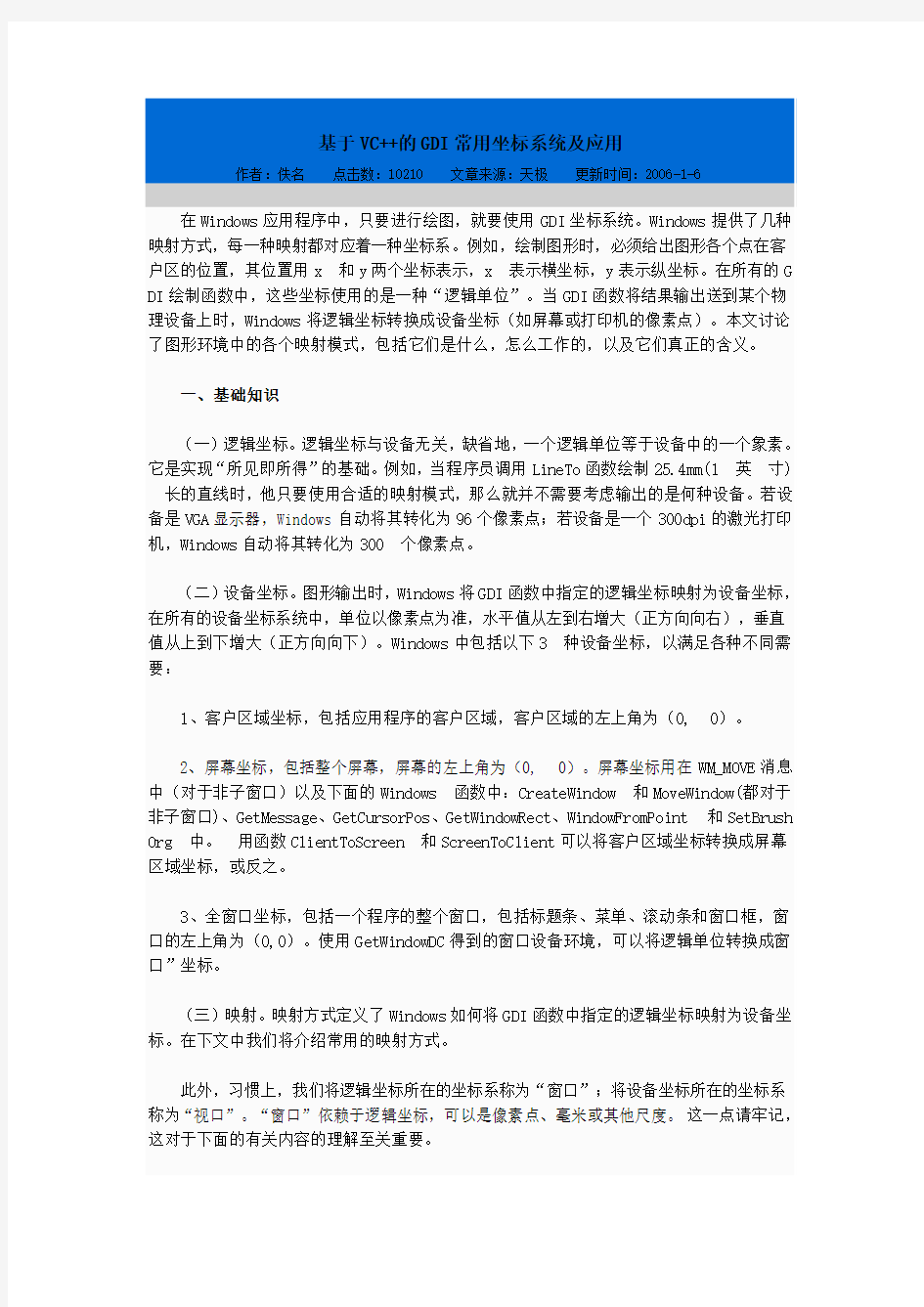
当在微软的窗口中进行绘图时,绘图的坐标原点在屏幕的左上角,任何物体在屏幕上定位都要参考这个坐标原点。在笛卡尔坐标系统中这个点被定义为坐标原点(0,0),水平坐标轴的正方向是从该点出发向右延伸,垂直坐标轴的正方向是从该点出发向下延伸。
图一、笛卡尔坐标系
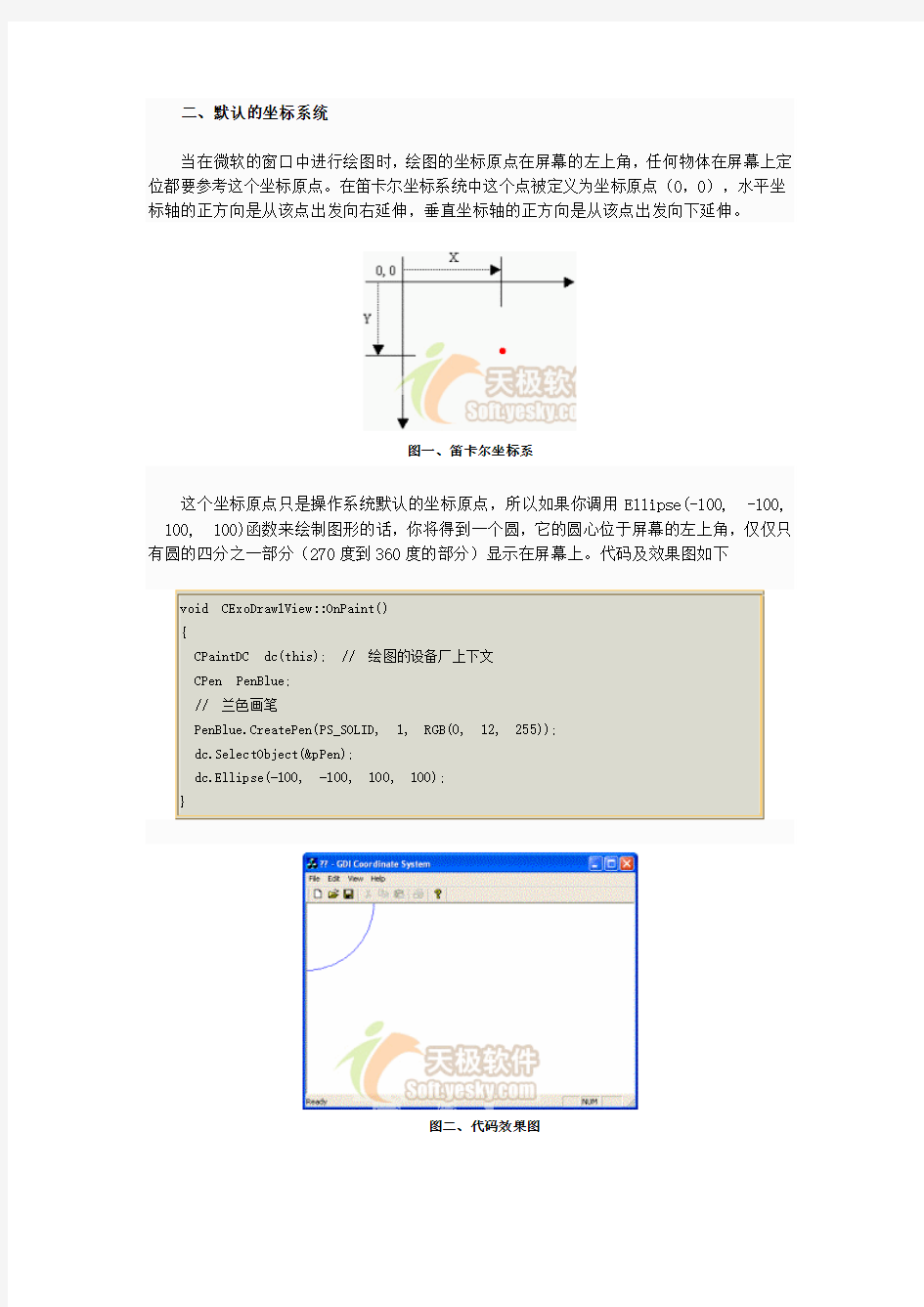
这个坐标原点只是操作系统默认的坐标原点,所以如果你调用Ellipse(-100, -100, 100, 100)函数来绘制图形的话,你将得到一个圆,它的圆心位于屏幕的左上角,仅仅只有圆的四分之一部分(270度到360度的部分)显示在屏幕上。代码及效果图如下
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // 绘图的设备厂上下文
CPen PenBlue;
// 兰色画笔
PenBlue.CreatePen(PS_SOLID, 1, RGB(0, 12, 255));
dc.SelectObject(&pPen);
dc.Ellipse(-100, -100, 100, 100);
}
图二、代码效果图
按照同样的原理,你可以使用CpaintDC的方法或按照你的要求创建函数来绘制任何几何或非几何图形。例如,下面的代码绘制了两条相互垂直的直线,垂点位与窗口的中心:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // 绘图的设备上下文
CRect Recto;
CPen PenBlue;
PenBlue.CreatePen(PS_SOLID, 1, RGB(0, 12, 255));
dc.SelectObject(&PenBlue);
dc.Ellipse(-100, -100, 100, 100);
CPen PenBlack;
PenBlack.CreatePen(PS_SOLID, 1, BLACK_PEN);
dc.SelectObject(&PenBlack);
// 得到客户区域的尺寸;
GetClientRect(&Recto);
dc.MoveTo(Recto.Width() / 2, 0);
dc.LineTo(Recto.Width() / 2, Recto.Height());
dc.MoveTo(0, Recto.Height() / 2);
dc.LineTo(Recto.Width(), Recto.Height() / 2);
}
图三、代码效果图
三、更改坐标系统
正如上面所看到的,默认的坐标系统坐标原点位于窗口的左上角,水平轴的正方向向右,垂直轴的正方向向下。为了进一步说明这一点,让我们来绘制一个半径为50个单位,圆心
位于(0,0)点,同时绘制一个连接(0,0)(100,100)两点的直线。
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
// A circle whose center is at the origin (0, 0)
dc.Ellipse(-50, -50, 50, 50);
// A line that starts at (0, 0) and ends at (100, 100)
dc.MoveTo(0, 0);
dc.LineTo(100, 100);
}
图四、代码效果图
这种默认的坐标原点在大多数图形操作情况下是适用的,但并不是总适用,有时你需要控制坐标系统的原点,例如,很多CAD(图形辅助设计)应用程序就需要用户来定义坐标系统的原点。
MFC提供了各种函数来处理坐标定位及扩展绘制区域的问题,包括在屏幕上任意位置设置坐标原点的函数。因为你是在一个设备上下文上进行绘图操作,因此,你所需要做的就是调用CDC::SetViewportOrg()函数。这个函数重载了两个版本,这允许你使用X、Y坐标或是一个定义的Point点。这个函数的语法如下:
SetViewportOrg(int X, int Y);
SetViewportOrg(CPoint Pt);
调用这个函数时只需要简单地说明哪儿是你想定义的坐标原点,如果使用函数的第二个版本,参数可以是一个POINT结构或是一个MFC提供的Tpoint类。为了演示这个函数的效果,让我们将上例的坐标原点沿X轴正方向移动200个单位,Y轴正方向移动150个单位,这时绘制函数如下:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); //绘图的设备上下文;
dc.SetViewportOrg(200, 150);
// 圆心位于坐标原点(0, 0)
dc.Ellipse(-50, -50, 50, 50);
// 连接(0, 0) 和 (100, 100)点的直线;
dc.MoveTo(0, 0);
dc.LineTo(100, 100);
}
图五、代码效果图
需要注意的是,你也可以相对于客户区域来指定坐标原点
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); //绘图的设备上下文;
CRect Recto;
//获取客户区尺寸;
GetClientRect(&Recto);
dc.SetViewportOrg(Recto.Width() / 2, Recto.Height() / 2);
// A circle whose center is at the origin (0, 0)
dc.Ellipse(-50, -50, 50, 50);
// A line that starts at (0, 0) and ends at (100, 100)
dc.MoveTo(0, 0);
dc.LineTo(100, 100);
}
图六、代码效果图
现在你已了解了如何设置坐标原点,让我们来将(380,220)点作为坐标原点,并绘制出笛卡尔的坐标轴:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
CRect Recto;
dc.SetViewportOrg(380, 220);
// Use a red pen
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
dc.SelectObject(PenRed);
// A circle whose center is at the origin (0, 0)
dc.Ellipse(-100, -100, 100, 100);
// Use a blue pen
CPen PenBlue(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(PenBlue);
// Horizontal axis
dc.MoveTo(-380, 0);
dc.LineTo(380, 0);
// Vertical axis
dc.MoveTo(0, -220);
dc.LineTo(0, 220);
}
图七、代码效果图
正如已经看到的,SetViewportOrg()函数可以更改设备上下文的坐标原点,同时,它也用来规定坐标轴的正方向,即水平轴向右,垂直轴向下:
图八、坐标轴示意图
为了说明这一点,下面来绘制一条黄色的45度角的直线:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetViewportOrg(380, 220);
// Use a red pen
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
dc.SelectObject(PenRed);
// A circle whose center is at the origin (0, 0)
dc.Ellipse(-100, -100, 100, 100);
// Use a blue pen
CPen PenBlue(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(PenBlue);
// Horizontal axis
dc.MoveTo(-380, 0);
dc.LineTo(380, 0);
// Vertical axis
dc.MoveTo(0, -220);
dc.LineTo(0, 220);
// An orange pen
CPen PenOrange(PS_SOLID, 1, RGB(255, 128, 0));
dc.SelectObject(PenOrange);
// A diagonal line at 45 degrees
dc.MoveTo(0, 0);
dc.LineTo(120, 120);
}
图九、代码效果图
正如你所看到的,我们的直线没有在45度位置,而是位于坐标系统的第四象限,造成这种情况的原因是默认的坐标系统。
三、固定映射模式
为了控制设备上下文中的坐标轴的方向,可以使用CDC类的SetMapMode()函数,它的语法如下: int SetMapMode(int nMapMode);
这个函数将根据参数的设置的不同做两件事,一是控制坐标轴的方向;二是坐标系统的单位长度。
这个函数的参数是用来定义映射模式的整型常量。它可能的值是:MM_TEXT, MM_LOENGLISH、
MM_HIENGLISH、MM_ANISOTROPIC、MM_HIMETRIC, MM_ISOTROPIC、 MM_LOMETRIC, MM_TWIPS。
默认情况下使用MM_TEXT映射模式。换句话说,如果你没有具体的规定某一映射模式,你的应用程序就将使用MM_TEXT映射模式。在这种映射模式下,设备上下文中的度量尺寸将使用默认的像素单位,水平坐标轴正方向向右,垂直坐标轴正方向向下。例如,上面的OnPaint事件可以用下面的代码重写,它将产生同样的效果,仿佛没有使用映射模式。
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_TEXT);
dc.SetViewportOrg(380, 220);
// Use a red pen
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
dc.SelectObject(PenRed);
// A circle whose center is at the origin (0, 0)
dc.Ellipse(-100, -100, 100, 100);
// Use a blue pen
CPen PenBlue(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(PenBlue);
// Horizontal axis
dc.MoveTo(-380, 0);
dc.LineTo(380, 0);
// Vertical axis
dc.MoveTo(0, -220);
dc.LineTo(0, 220);
// An orange pen
CPen PenOrange(PS_SOLID, 1, RGB(255, 128, 0));
dc.SelectObject(PenOrange);
// A diagonal line at 45 degrees
dc.MoveTo(0, 0);
dc.LineTo(120, 120);
}
图十、代码效果图
MM_LOENGLISH模式,与其他一些映射模式(不包括MM_TEXT模式)一样,执行两个动作,它改变坐标轴的方向,垂直坐标轴的正方向向上;
图十一、MM_LOENGLISH映射模式下的坐标系
此外,度量单位改为0.01英寸,这意味着你提供的坐标将除以100,观察上述代码的MM_LOENGLISH 映射效果
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_LOENGLISH);
dc.SetViewportOrg(380, 220);
. . .
}
图十二、代码效果图
正如你所看到的,直线现在位于坐标系的第一象限,同时,直线比以前缩短,圆也比以前的要小。
与MM_LOENGLISH映射模式相似,MM_HIENGLISH映射模式也是垂直坐标轴正向向上,只是它以0.001英寸为坐标单位,下面是它的效果:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_HIENGLISH);
dc.SetViewportOrg(380, 220);
. . . Same as previous
}
图十三、代码效果图
MM_LOMETRIC映射模式使用与上两种映射模式相同的坐标轴,不同的是MM_LOMETRIC使用0.1毫米为单位,下面是一个例子:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_LOMETRIC);
dc.SetViewportOrg(380, 220);
. . .
}
图十四、代码效果图
MM_HIMETRIC使用与上述三种映射模式相同的坐标系,但它的坐标单位是0.01毫米,下面例子代码如下:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_HIMETRIC);
dc.SetViewportOrg(380, 220);
. . . Same as previous
}
图十五、代码效果图
MM_TWIPS映射模式将每个逻辑单位(像素)除以20,实际上一twip等于1/1440 英寸,坐标系统仍然与上面几种映射方式相同。
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
CRect Recto;
dc.SetMapMode(MM_TWIPS);
dc.SetViewportOrg(380, 220);
. . .
}
图十六、代码效果图
四、自定义坐标系统
目前为止,我们使用的映射模式可以允许我们选择坐标轴的方向,但仅仅是Y轴的方向。而且,我们不能更改坐标系统的单位,这是因为各种映射模式(MM_TEXT, MM_HIENGLISH, MM_LOENGLISH, MM_HIMETRIC, MM_LOMETRIC, and MM_TWIPS)有固定的属性集,例如坐标轴的方向和坐标单位等。在CAD应用程序中,如果你需要灵活设置坐标轴方向及坐标单位的话,应该怎么做呢?
仔细研究下面的OnPaint()事件代码,它绘制了一个200X200像素大小的红边、浅绿色背景的正方形,这个正方形的顶点在(-100,-100)处,右底端位于(100,100)处。同时,从坐标原点处绘制一个45度的直线。
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
CBrush BrushAqua(RGB(0, 255, 255));
dc.SelectObject(PenRed);
dc.SelectObject(BrushAqua);
// Draw a square with a red border and an aqua background
dc.Rectangle(-100, -100, 100, 100);
CPen BluePen(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(BluePen);
// Diagonal line at 45 degrees starting at the origin (0, 0)
dc.MoveTo(0, 0);
dc.LineTo(200, 200);
}
图十七、代码效果图
正如你所看到的,我们只得到了正方形的右下部分,同时直线指向时钟的三点到六点之间的方向。假定你想将坐标原点设置与窗口中央位置,或者是更精确一点,设置于点(340, 220)处,我们已经知道可以使用CDC::SetViewportOrg()(记住,这个函数只用来更改坐标原点,它并不影响坐标轴的方向及坐标单位。同时,需要注意的是,它使用的坐标单位是像素)函数,下面是一个例子(我们没有规定映射模式,所以程序使用的是默认的MM_TEXT 映射模式)。
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetViewportOrg(340, 220);
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
CBrush BrushAqua(RGB(0, 255, 255));
dc.SelectObject(PenRed);
dc.SelectObject(BrushAqua);
// Draw a square with a red border and an aqua background
dc.Rectangle(-100, -100, 100, 100);
CPen BluePen(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(BluePen);
// Diagonal line at 45 degrees starting at the origin (0, 0)
dc.MoveTo(0, 0);
dc.LineTo(200, 200);
}
图十八、代码效果图
为了控制你自己应用程序中的坐标系统单位,坐标轴的方向,可以使用MM_ISOTROPIC 或MM_ANISOTROPIC映射模式。第一件事是调用CDC::SetMapMode()函数,并在两个常量中选择一个(MM_ISOTROPIC或 MM_ANISOTROPIC)。下面是例子代码:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_ISOTROPIC);
dc.SetViewportOrg(340, 220);
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
CBrush BrushAqua(RGB(0, 255, 255));
dc.SelectObject(PenRed);
dc.SelectObject(BrushAqua);
// Draw a square with a red border and an aqua background
dc.Rectangle(-100, -100, 100, 100);
CPen BluePen(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(BluePen);
// Diagonal line at 45 degrees starting at the origin (0, 0)
dc.MoveTo(0, 0);
dc.LineTo(200, 200);
}
图十九、代码效果图
先抛开上面的图片。当调用CDC::SetMapMode(),并使用MM_ISOTROPIC或 MM_ANISOT ROPIC作为参数后,并没有结束,这两种映射方式允许我们改变坐标轴的正方向及坐标单位。这两种映射方式的区别在于:MM_ISOTROPIC映射方式中水平、垂直坐标轴的单位相等,MM_ ANISOTROPIC映射方式可以随意控制水平及垂直方向的坐标单位长度。
所以,在调用SetMapMode()函数并规定了MM_ISOTROPIC或MM_ANISOTROPIC映射模式后,你必须调用CDC:SetWindowExt()函数,这个函数用来计算老的或默认的坐标系中一个单位的长度。这个函数有两个版本:
CSize SetWindowExt(int cx, int cy);
CSize SetWindowExt(SIZE size);
如果使用第一版本,第一个参数CX说明了水平坐标轴上按照新的逻辑单位代表的长度,CY代表了垂直坐标轴上按照新的逻辑单位代表的长度。
如果你知道按照新的坐标单位计算需要的逻辑尺寸的话,可以使用第二个版本的函数,例子代码如下:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_ISOTROPIC);
dc.SetViewportOrg(340, 220);
dc.SetWindowExt(480, 480);
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
CBrush BrushAqua(RGB(0, 255, 255));
dc.SelectObject(PenRed);
dc.SelectObject(BrushAqua);
// Draw a square with a red border and an aqua background
dc.Rectangle(-100, -100, 100, 100);
CPen BluePen(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(BluePen);
// Diagonal line at 45 degrees starting at the origin (0, 0)
dc.MoveTo(0, 0);
dc.LineTo(200, 200);
}
图二十、代码效果图
调用SetWindowExt()函数后,紧接着应调用SetViewportExt()函数,它的任务是规定水平及垂直坐标轴的单位。我们可以这样认为,SetWindowExt()函数对应着“窗口”,Set ViewportExt()函数对应着“视口”。SetViewportExt()函数有两个版本:
CSize SetViewportExt(int cx, int cy);
CSize SetViewportExt(SIZE size);
上述两个函数中的参数与“窗口”中的尺寸是相互对应的,它的单位是像素。为了进一步说明这两个函数的使用,我对这两个函数进行了重新说明:
SetWindowExt(int Lwidth, int Lheight) //参数的单位为逻辑单位(Logical);
SetViewportExt(int Pwidth, int Pheight) //参数的单位为像素(Pixel);
以x轴为例(y轴类似),逻辑坐标系中的x轴的单位刻度=| Pwidth | / | Lw idth |。这表示x轴上一个逻辑单位等于多少个像素。比如我们先通过GetDeviceCap(LO GPIXELSX)获得在我们的显示器上每英寸等于多少个像素,设为p,然后我们将它赋给Pwi dth,将Lwidth赋成2,即Pwidth / Lwidth=p / 2。那么,此时逻辑坐标系x轴上的单位刻度就是p / 2个像素;又由于p个像素是代表一个英寸的,所以此时的逻辑坐标系x轴上的单位刻度同时也是半个英寸。还有一点要注意的是,如果Lwidth与Pwidth同号,逻辑坐标的x轴方向与设备坐标系中的x轴方向相同,否则相反。
此外,当使用MM_ISOTROPIC模式时,如果通过计算window与viewport范围的比值得到两个方向的单位刻度值不同,那么将会以较小的那个为准。
下面是一个例子:
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
dc.SetMapMode(MM_ISOTROPIC);
dc.SetViewportOrg(340, 220);
dc.SetWindowExt(480, 480);
dc.SetViewportExt(440, -680);
CPen PenRed(PS_SOLID, 1, RGB(255, 0, 0));
CBrush BrushAqua(RGB(0, 255, 255));
dc.SelectObject(PenRed);
dc.SelectObject(BrushAqua);
// Draw a square with a red border and an aqua background
dc.Rectangle(-100, -100, 100, 100);
CPen BluePen(PS_SOLID, 1, RGB(0, 0, 255));
dc.SelectObject(BluePen);
// Diagonal line at 45 degrees starting at the origin (0, 0)
dc.MoveTo(0, 0);
dc.LineTo(200, 200);
}
图二十一、代码效果图
五、实例代码
为了灵活使用逻辑坐标系,下面给出了几个例子代码: 例1:绘制带箭头的坐标轴
void CExoDraw1View::OnPaint()
{
CPaintDC dc(this); // device context for painting
CBrush bgBrush(BLACK_BRUSH);
dc.SelectObject(bgBrush);
dc.Rectangle(Recto);
dc.SetMapMode(MM_ISOTROPIC);
dc.SetViewportOrg(0, 440);
dc.SetWindowExt(480, 480);
dc.SetViewportExt(440, -680);
CPen PenWhite(PS_SOLID, 1, RGB(255, 255, 255));
dc.SelectObject(PenWhite);
dc.MoveTo(21, 20);
dc.LineTo(21, 75);
// Up arrow
dc.MoveTo(16, 75);
dc.LineTo(21, 90);
dc.LineTo(26, 75);
数字通信系统的主要性能指标
批准人: 年月日 第二讲数字通信系统的主要性能指标 教学提要 课目数字通信系统的主要性能指标 内容一、有效性指标 二、可靠性指标 目的掌握日常的故障处理方式方法,为以后的值勤打下良好的基础。 方法集中授课,理论讲解,电化教学 时间 45分钟 要求 1.遵守课堂纪律,专心听讲,做好笔记; 2.勤于动脑,善于思考,课后做好复习。 教学进程 教学准备(5分钟)
1.清点人数,准备教学用具 2.宣布作业提要 教学实施(37分钟) 在设计及评价一个通信系统时,必然涉及通信系统的性能指标问题。通信系统的性能指标包括信息传输的有效性、可靠性、适应性、经济性、标准性及维护使用方便等等。因为通信的任务时传递信息,从信息传输角度讲,在各项实际要求中起主导的、决定作用的,主要是通信系统传输信息的有效性和可靠性。 一、有效性指标 有效性时通信系统传输信息的数量上的表征,时指给定信道和时间内传输信息的多少。数字通信系统中的有效性通常用码元速率R B、信息速率R b和频带利用率衡量。 (一)码元速率(R B) 码元速率R B也称为传码率、符号传输速率等 定义:码元速率R B是指每秒钟传输码元的数目。 单位:为波特(baud),简记为B。 虽然数字信号由二进制和多进制的区分,但码元速率与信号的进制无关,只与一个码元占有时间T b有关,R B=1/T b。 (二)信息速率(Rb)
在讨论信息速率之前,首先介绍信息量的概念。 1.信息量。图1--6给出的两个码元序列,虽然码元速率相同,但其携带的信息量是不同的。我们可以举例说明,假设有四种等概出先的离散信息“黄”“红”“绿”“蓝”要传输;如用二进制码元0,1,2,3,表示时,只要一个码元就可以表示一种颜色。显然四进制信号的一个码元有二进制信号两个码元具有的信息量。衡量各种不同消息中包含信息多少的标准称为信息量。信息量单位为比特,符号bit。关于信息量的严格定义限于篇幅,我们不作讨论,这里至给出一个特定条件下的定义:一个二进制数字信号当1,0码等概出现时,一个码元包含的信息量为1*(bit)。 一个N 进制狮子信号,各种码元等槪出现时,一个码元含有的信息量为log2N(bit)。 2.信息速率(R b)又称传信率 定义:信息速率(R b)是指每秒传输的信息量。 单位:比特/秒(bit/s),简记(b/s) 对于传输二进制数字信号, 有R b=二进制码元数目/秒, 对于传输N二进制数字信号, 有R b=R BN log2N
测量相关的坐标体系
测量相关的坐标体系 地固坐标系又称大地坐标系/地球坐标系,是一种固定在地球上,随地球一起转动的非惯性坐标系。根据其原点的位置不同,分为地心坐标系和参心坐标系。 地心坐标系的原点与地球质心重合.GPS卫星定位测量常用的WGS-84坐标 系就是一种地心坐标系,坐标原点为地球质心,其地心空间直角坐标系的Z轴指向BIH (国际时间服务机构)1984.O定义的协议地球极(CTP)方向,X轴指向BIH 1984.0的零子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系统。 参心坐标系的原点与某一地区或国家所采用的参考椭球中心重合,通常与地球质心不重合。我国先后建立的1954年北京坐标系、1980西安坐标系都是参心坐标系。但是随着GNSS技术的发展,很多国家都逐渐开使用地心坐标系. AutoCAD中采用的数学坐标系:世界坐标系(WCS)即参照坐标系。其它所有的坐标系都是相对WCS定义的,WCS是永远不改变的。用户坐标系统(UCS)即 工作中的坐标系,使我们绘图使用最多的坐标系。 (Cass7.0绘图软件采用的坐标系为测量坐标系,正好和数学上的笛卡尔坐标系相反,X轴为南北方向,Y轴为东西方向。 这就是在CAD中查询出的坐标和在Cass中查询出的坐标纵横坐标刚好相反的原因。) 1 、地理坐标 地理坐标是用纬度、经度表示地面点位置的球面坐标。在大地测量学中,对于地理坐标系统中的经纬度有三种提法:天文经纬度、大地经纬度和地心经纬度。 (1)天文坐标系 天文坐标系是以铅垂线为基准、以大地水准面为基准面建立的坐标系,它以天文经纬度(λ,ψ)表示地面点在大地水准面上的位置,其中天文经度λ是观测点天顶子午面与格林尼治天顶子午面间的二面角,地球上定义为本初子午面与观测点之间的二面角;天文纬度ψ定义为铅垂线与赤道平面间的夹角。 (2)大地坐标系 大地坐标系是以椭球面法线为基准线,以参考椭球面为基准面建立的坐标系,它以大地坐标(L,B,h)表示地面点在参考椭球面上的位置,其中大地经度L为参考椭球面上某点的大地子午面与本初子午面间的二面角,大地纬度B为参考椭球面上某点的法线与赤道平面的夹角,北纬为正,南纬为负;为h为大地高,即从观测点沿椭球法线方向到椭球面的距离。我国目前常用坐标系为1954北京坐标系、1980国家大地坐标系以及2000国家大地坐标系(CGCS2000)。 (3)地心坐标系 地心坐标系是地固坐标系的一种,是指以总地球椭球为基准、原点与质心重合的坐标系,它与地球体固连在一起,与地球同步运动。它以(L,B)来表示点的位置,其中L为地心经度,与大地经度一致;B为地心纬度,指参考椭球面上观测点与椭球质心或中心连线与赤道面之间的夹角。心坐标系是在大地体内建立的O-XYZ坐标系。原点O设在大地体的质量中心,用相互垂直的X,Y,Z三个
软件系统性能的常见指标
衡量一个软件系统性能得常见指标有: 1、响应时间(Response time) 响应时间就就是用户感受软件系统为其服务所耗费得时间,对于网站系统来说,响应时间就就是从点击了一个页面计时开始,到这个页面完全在浏览器里展现计时结束得这一段时间间隔,瞧起来很简单,但其实在这段响应时间内,软件系统在幕后经过了一系列得处理工作,贯穿了整个系统节点。根据“管辖区域”不同,响应时间可以细分为: (1)服务器端响应时间,这个时间指得就是服务器完成交易请求执行得时间,不包括客户端到服务器端得反应(请求与耗费在网络上得通信时间),这个服务器端响应时间可以度量服务器得处理能力。 (2)网络响应时间,这就是网络硬件传输交易请求与交易结果所耗费得时间、?(3)客户端响应时间,这就是客户端在构建请求与展现交易结果时所耗费得时间,对于普通得瘦 客户端Web应用来说,这个时间很短,通常可以忽略不计;但就是对于胖客户端Web应用来说,比如Java applet、AJAX,由于客户端内嵌了大量得逻辑处理,耗费得时间有可能很长,从而成为系统得瓶颈,这就是要注意得一个地方。?那么客户感受得响应时间其实就是等于客户端响应时间+服务器端响应时间+网络响应时间。细分得目得就是为了方便定位性能瓶颈出现在哪个节点上(何为性能瓶颈,下一节中介绍)。2?.吞吐量(Throughput) 吞吐量就是我们常见得一个软件性能指标,对于软件系统来说,“吞”进去得就是请 求,“吐”出来得就是结果,而吞吐量反映得就就是软件系统得“饭量",也就就是系统得处理能力,具体说来,就就是指软件系统在每单位时间内能处理多少个事务/请求/单位数据等。但它得定义比较灵活,在不同得场景下有不同得诠释,比如数据库得吞吐量指得就是单位时间内,不同SQL语句得执行数量;而网络得吞吐量指得就是单位时间内在网络上传输得数据流量。吞吐量得大小由负载(如用户得数量)或行为方式来决定。举个例子,下载文件比浏览网页需要更高得网络吞吐量、?3。资源使用率(Resource utilization) 常见得资源有:CPU占用率、内存使用率、磁盘I/O、网络I/O。 我们将在Analysis结果分析一章中详细介绍如何理解与分析这些指标。 4.点击数(Hits per second) 点击数就是衡量WebServer处理能力得一个很有用得指标。需要明确得就是:点击数不就是我们通常理解得用户鼠标点击次数,而就是按照客户端向WebServer发起了多少次http请求计算得,一次鼠标可能触发多个http请求,这需要结合具体得Web系统实现来计算。 5、并发用户数(Concurrentusers)?并发用户数用来度量服务器并发容量与同步协调能力。在客户端指一批用户同时执行一个操作。并发数反映了软件系统得并发处理能力,与吞吐量不同得就是,它大多就是占用套接字、句柄等操作系统资源。 另外,度量软件系统得性能指标还有系统恢复时间等,其实凡就是用户有关资源与时间得要求都可以被视作性能指标,都可以作为软件系统得度量,而性能测试就就是为了验证这些性能指标就是否被满足。 //-———---——-----—--------—----—————---—-——----———---——--—-—-———--—--——-—-—-----————----——------—--—-—---- 软件性能得几个主要术语
工程测量中的坐标系选择原理与方法
摘要 摘要:近几年来,国家大力兴建高速铁路,由于高速铁路对边长投影变形的控制要求很高(2.5cm /km),因而导致长期以来一直使用的三度带高斯投影平面之间坐标系已难以满足高速铁路建设的的精度要求,本文就具有抵偿高程投影面的任意带坐标系原理作出了阐释,具有抵偿高程投影面的任意带坐标系,克服了三度带坐标系在大型工程中精度无法满足要求的局限性,能有效地实现两种长度变形的相互抵偿,从而达到控制变形的目的。 关键词:高速铁路、抵偿高程面、坐标转换、投影变形、高斯正形投影
Abstract Abstract:In recent years, countries build high-speed railway, due to high speed railway projective deformation control of revised demanding (2.5 cm/km), and therefore cause has long been used with three degrees of gaussian projection planes already difficult to satisfy between coordinate system of high-speed railway construction, this article the accuracy requirement of the planes with counter elevation arbitrary made interpretation with coordinate system, with the principle of any planes with anti-subsidy elevation, overcome three degrees coordinate with coordinate system in large engineering accuracy can't satisfy requirements limitation, can effectively achieve the two length deformation of mutual counter, achieve the purpose of controlling deformation. keywords:rapid transit railway Counter elevation surface Coordinate transformation Projective deformation Gaussian founder form projection
控制系统性能指标
本章主要内容: 1控制系统的频带宽度 2系统带宽的选择 3确定闭环频率特性的图解方法 4闭环系统频域指标和时域指标的转换 五、闭环系统的频域性能指标
1 控制系统的频带宽度 1 频带宽度 当闭环幅频特性下降到频率为零时的分贝值以下3分贝时,对应的频率称为带宽频率,记为ωb。即当ω> ωb 2。Ig ΦO)∣<20?∣ΦQ,0)∣-3 而频率范围 根据带宽定义,对高于带宽频率的正弦输入信号,系统输岀将呈现较大的衰减,因此选取适当的带宽,可以抑制高频噪声的影响。但带宽过窄又会影响系统正弦输入信号的能力,降低瞬态响应的速度。因此在设计系统时,对于频率宽度的确定必须兼顾到系统的响应速度和抗高频干扰的要求。 2、丨型和II型系统的带宽 Φ(-0 = -―- 凶为开环系s?j?ι翌,,E 所以20 Igl Φ(J?) = 2Glg 1 / JiT応孑=20Ig-L 二阶系虬的例环传禺为, (】)(,¥,〕= — ~ Λ'+2CΓ?1S +Λ?; 1 圜为I (I I(√,3) =L ∕∣ T此∕?>3+4ζ,T?∕∕? = ?∣2 叫=叫[(1 -2√2) + √(l-2ζ*3)2+l P 2、系统带宽的选择 由于系统会受多种非线性因素的影响,系统的输入和输岀端不可避免的存在确定性扰动和随机噪声,因此控制系统的带宽的选择需综合考虑各种输入信号的频率范围及其对系统性能的影响,即应使系统对输入信号具有良好的跟踪能力和对扰动信号具有较强的抑制能力。 总而言之,系统的分析应区分输入信号的性质、位置,根据其频谱或谱密度以及相应的传递函数选择合适带宽,而系统设计主要是围绕带宽来进行的。 3、确定闭环频率特性的图解方法 b)称为系统带宽
软件系统性能的常见指标
衡量一个软件系统性能的常见指标有: 1.响应时间(Response time) 响应时间就是用户感受软件系统为其服务所耗费的时间,对于网站系统来说,响应时间就是从点击了一个页面计时开始,到这个页面完全在浏览器里展现计时结束的这一段时间间隔,看起来很简单,但其实在这段响应时间内,软件系统在幕后经过了一系列的处理工作,贯穿了整个系统节点。根据“管辖区域”不同,响应时间可以细分为: (1)服务器端响应时间,这个时间指的是服务器完成交易请求执行的时间,不包括客户端到服务器端的反应(请求和耗费在网络上的通信时间),这个服务器端响应时间可以度量服务器的处理能力。 (2)网络响应时间,这是网络硬件传输交易请求和交易结果所耗费的时间。 (3)客户端响应时间,这是客户端在构建请求和展现交易结果时所耗费的时间,对于普通的瘦客户端Web应用来说,这个时间很短,通常可以忽略不计;但是对于胖客户端Web应用来说,比如Java applet、AJAX,由于客户端内嵌了大量的逻辑处理,耗费的时间有可能很长,从而成为系统的瓶颈,这是要注意的一个地方。 那么客户感受的响应时间其实是等于客户端响应时间+服务器端响应时间+网络响应 时间。细分的目的是为了方便定位性能瓶颈出现在哪个节点上(何为性能瓶颈,下一节中介绍)。 2.吞吐量(Throughput) 吞吐量是我们常见的一个软件性能指标,对于软件系统来说,“吞”进去的是请求,“吐”出来的是结果,而吞吐量反映的就是软件系统的“饭量”,也就是系统的处理能力,具体说来,就是指软件系统在每单位时间内能处理多少个事务/请求/单位数据等。但它的定义比较灵活,在不同的场景下有不同的诠释,比如数据库的吞吐量指的是单位时间内,不同SQL语句的执行数量;而网络的吞吐量指的是单位时间内在网络上传输的数据流量。吞吐量的大小由负载(如用户的数量)或行为方式来决定。举个例子,下载文件比浏览网页需要更高的网络吞吐量。 3.资源使用率(Resource utilization) 常见的资源有:CPU占用率、内存使用率、磁盘I/O、网络I/O。 我们将在Analysis结果分析一章中详细介绍如何理解和分析这些指标。 4.点击数(Hits per second) 点击数是衡量Web Server处理能力的一个很有用的指标。需要明确的是:点击数不是我们通常理解的用户鼠标点击次数,而是按照客户端向Web Server发起了多少次http请求计算的,一次鼠标可能触发多个http请求,这需要结合具体的Web系统实现来计算。5.并发用户数(Concurrent users) 并发用户数用来度量服务器并发容量和同步协调能力。在客户端指一批用户同时执行一个操作。并发数反映了软件系统的并发处理能力,和吞吐量不同的是,它大多是占用套接字、句柄等操作系统资源。 另外,度量软件系统的性能指标还有系统恢复时间等,其实凡是用户有关资源和时间的要求都可以被视作性能指标,都可以作为软件系统的度量,而性能测试就是为了验证这些性能指标是否被满足。
模拟通信系统性能指标
1.5.1 模拟通信系统性能指标 知识点归纳: 通信系统的主要性能指标 通信系统的性能指标指涉及有效性、可靠性、标准性、经济性及可维护性等,但设计或评价通信系统的主要性能指标是传输信息的有效性和可靠性。有效性主要是指消息传输的“速度”,而可靠性主要是指消息传输的“质量”。 对于模拟通信系统来说,有效性可以用消息占用的有效带宽来度量,可靠性可以用接受端输出的信噪比来度量。 对于数字通信系统来说,度量其有效性的主要性能指标是传输速率和频带利用率,可靠性主要指标是差错率。 数字系统的性能指标 有效性 有效性时通信系统传输信息的数量上的表征,时指给定信道和时间内传输信息的多少。数字通信系统中的有效性通常用码元速率RB、信息速率Rb和频带利用率衡量。 1.码元速率 码元速率RB也称为传码率、符号传输速率等定义:码元速率RB是指每秒钟传输码元的数目。单位:为波特(baud),简记为B, 例如,某系统在 2 秒内共传送 4800 个码元,则该系统的传码率为 2400B 。 虽然数字信号由二进制和多进制的区分,但码元速率与信号的进制无关,只与一个码元占有时间Tb有关,RB=1/Tb。 2 .信息速率 定义:信息速率(Rb)是指每秒传输的信息量。单位:比特/秒(bit/s),简记(b/s) 例如,若某信源在 1 秒钟内传送 1200 个符号,且每一个符号的平均信息量为 l ( bit ),则该信源的信息传输速率 =1200b/s 或 1200bps 。对于传输二进制数字信号,则Rb为二进制码元数目/秒,对于传输N二进制数字信号,有 Rb=RBlog2M 式中RB为M进制数字信号的码元速率。二进制时,码元速率与信息速率数值相等,只是单位不同。 3.频带利用率 在比较不同的数字通信系统的效率时,仅仅看他们的信息传输速率是不够的。因为即使是两个系统的
--BPSK通信系统的计算机性能分析与MATLAB仿真.
淮海工学院 课程设计报告书 课程名称:通信系统的计算机仿真设计 题目:BPSK通信系统性能分析与MATLAB仿真 系(院): 学期: 专业班级: 姓名: 学号: 评语: 成绩: 签名: 日期:
BPSK通信系统性能分析与MATLAB仿真 1绪论 随着通信技术的发展,信号处理方面硬件设计与专业软件设计结合日趋紧密,已经有一些公司开付出专业数字信号处理软件。比较优秀的而且得到广大技术人员认可的有MATLAB。 MATLAB等优秀软件使仿真技术得到很好的应用。通过对通信过程的仿真,我们就可以在低成本的条件下检测某一个方案是否能够实现,是否有更好的方案可以代替原来的方案,这样对通信的研究就站在了一个更高的起点,使通信技术的发展日新月异,近几年手机的普及率的迅速提高就从侧面反映移动通信技术的发展。 现代移动通信系统的发展是以多种先进的通信技术为基础发展起来的。移动通信的主要基本技术包括调制技术、移动信道中颠簸的传播特性、多址方式、抗干扰技术以及组网技术。在移动通信中,数字调制解调技术是关键技术,其中数字调相信号具有数字通信的诸多优点,在数字移动通信中广泛使用它来传送各种控制信息。 1.1 研究背景与研究意义 随着通信系统复杂性不断增加,传统设计已不能适应发展的需要,通信系统的模拟仿真技术越来越受到重视,因此在设计新系统时,要对原有的系统做出修改或者进行相关研究,通常要进行建模和仿真,通过仿真结果来衡量方案的可行性,从中选择合理的系统配置和参数设置,然后进行实际应用。MATLAB 作为一种功能强大的数据分析和工程计算高级语言,已被广泛应用于现代科学技术研究和工程设计的各个领域。调制解调技术在通信系统中不可或缺,因此,基于MATLAB的调制解调模块仿真设计对通信系统的教学和科研都具有积极的意义。 1.2 课程设计的目的和任务 本次课程设计是根据“通信工程专业培养计划”要求而制定的。通信系统的计算机仿真设计课程设计是通信工程专业的学生在学完通信工程专业基础课、通信工程专业主干课及科学计算机仿真专业课后进行的综合性课程设计。其目的在于使学生在课程设计过程中能够理论联系实际,在实践中充分利用所学理论知识分析和研究设计过程中出现的各类技术问题,巩固和扩大所学知识面,为以后走向工作岗位进行设计打下一定的基础。 课程设计的任务是:(1)掌握一般通信系统设计的过程、步骤、要求、工作内容和设计方法;掌握用计算机仿真通信系统的方法。(2)建立系统模型:根据数字调制与解调原理及通信系统组成情况建立所选题目的系统模型。(3)设置参数:包括信源、抽样量化编码/译码、信道编码/译码、基带调制/解调器、各噪声产生器、信道、误码率计算器、星座图仪等参数的选择。(4)运行参数,进行系统仿真,得到误码率与信
计算机的主要性能指标(必知)
计算机的主要性能指标是什么 计算机功能的强弱或性能的好坏,不是由某项指标决定的,而是由它的系统结构、指令系统、硬件组成、软件配置等多方面的因素综合决定的。对于大多数普通用户来说,可以从以下几个指标来大体评价计算机的性能。 (1)运算速度。运算速度是衡量计算机性能的一项重要指标。通常所说的计算机运算速度(平均运算速度),是指每秒钟所能执行的指令条数,一般用“百万条指令/秒”(mips,Million Instruction Per Second)来描述。同一台计算机,执行不同的运算所需时间可能不同,因而对运算速度的描述常采用不同的方法。常用的有CPU时钟频率(主频)、每秒平均执行指令数(ips)等。微型计算机一般采用主频来描述运算速度,例如,Pentium/133的主频为133 MHz,Pentium Ⅲ/800的主频为800 MHz,Pentium 4 1.5G的主频为1.5 GHz。一般说来,主频越高,运算速度就越快。 (2)字长。计算机在同一时间内处理的一组二进制数称为一个计算机的“字”,而这组二进制数的位数就是“字长”。在其他指标相同时,字长越大计算机处理数据的速度就越快。早期的微型计算机的字长一般是8位和16位。目前586(Pentium,Pentium Pro,PentiumⅡ,PentiumⅢ,Pentium 4)大多是32位,现在的大多数人都装64位的了。 (3)内存储器的容量。内存储器,也简称主存,是CPU可以直接访问的存储器,需要执行的程序与需要处理的数据就是存放在主存中的。内存储器容量的大小反映了计算机即时存储信息的能力。随着操作系统的升级,应用软件的不断丰富及其功能的不断扩展,人们对计算机内存容量的需求也不断提高。目前,运行Windows 95或Windows 98操作系统至少需要16 M的内存容量,Windows XP 则需要128 M以上的内存容量。内存容量越大,系统功能就越强大,能处理的数据量就越庞大。 (4)外存储器的容量。外存储器容量通常是指硬盘容量(包括内置硬盘和移动硬盘)。外存储器容量越大,可存储的信息就越多,可安装的应用软件就越丰富。目前,硬盘容量一般为10 G至60 G,有的甚至已达到120 G。 以上只是一些主要性能指标。除了上述这些主要性能指标外,微型计算机还有其他一些指标,例如,所配置外围设备的性能指标以及所配置系统软件的情况等等。另外,各项指标之间也不是彼此孤立的,在实际应用时,应该把它们综合起来考虑,而且还要遵循“性能价格比”的原则。 追问 信息存储容量的基本单位,一个字节,,1K字节、1兆字节,1G字节,1TB的换算关系 回答 1024电脑的容量单位最小的是Bit,也就是位。而8位为一个字节,也就是Byte。在往上就是KB,MB,GB,TB。 电脑使用的是2进制,即1KB=1024B,1MB=1024KB=1048576B, 1GB=1024MB,1TB=1024GB
四大常用坐标系及高程坐标系
四大常用坐标系及高程 坐标系 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
我国四大常用坐标系及高程坐标系 1、北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.
模拟通信系统性能指标
模拟通信系统性能指标 知识点归纳: 通信系统的主要性能指标 通信系统的性能指标指涉及有效性、可靠性、标准性、经济性及可维护性等,但设计或评价通信系统的主要性能指标是传输信息的有效性和可靠性。有效性主要是指消息传输的“速度”,而可靠性主要是指消息传输的“质量”。 对于模拟通信系统来说,有效性可以用消息占用的有效带宽来度量,可靠性可以用接受端输出的信噪比来度量。 对于数字通信系统来说,度量其有效性的主要性能指标是传输速率和频带利用率,可靠性主要指标是差错率。 数字系统的性能指标 有效性 有效性时通信系统传输信息的数量上的表征,时指给定信道和时间内传输信息的多少。数字通信系统中的有效性通常用码元速率RB、信息速率Rb和频带利用率衡量。 1.码元速率 码元速率RB也称为传码率、符号传输速率等定义:码元速率RB是指每秒钟传输码元的数目。单位:为波特(baud),简记为B, 例如,某系统在 2 秒内共传送 4800 个码元,则该系统的传码率为 2400B 。 虽然数字信号由二进制和多进制的区分,但码元速率与信号的进制无关,只与一个码元占有时间Tb有关,RB=1/Tb。 2 .信息速率 定义:信息速率(Rb)是指每秒传输的信息量。单位:比特/秒(bit/s),简记(b/s) 例如,若某信源在 1 秒钟内传送 1200 个符号,且每一个符号的平均信息量为 l ( bit ),则该信源的信息传输速率 =1200b/s 或 1200bps 。对于传输二进制数字信号,则Rb为二进制码元数目/秒,对于传输N二进制数字信号,有Rb=RBlog2M 式中RB为M进制数字信号的码元速率。二进制时,码元速率与信息速率数值相等,只是单位不同。 3.频带利用率 在比较不同的数字通信系统的效率时,仅仅看他们的信息传输速率是不够的。因为即使是两个系统的信息传输的速率相同,他们所占用的频带宽度也可能不同。从而效率也不同。对于相同的信道频带,传输的信息量越来越高。所以用来衡量数字通信系统传输效率指标(有效性)应当是单位频带内的传输速率,即 n=符号传输速率/频带宽度(波特/赫) 对于二进制传输,则可以表示为 n=信息传输速率/频带宽度(比特/秒*.赫) 可靠性
常用坐标系
一、常用坐标系 1、北京坐标系 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。 1954年北京坐标系的历史: 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101 3、2000国家大地坐标系的定义 国家大地坐标系的定义包括坐标系的原点、三个坐标轴的指向、尺度以及地球椭球的4个基本参数的定义。2000国家大地坐标系的原点为包括海洋和大气的整个地球的质量中心;2000国家大地坐标系的Z轴由原点指向历元2000.0的地球参考极的方向,该历元的指向由国际时间局给定的历元为1984.0的初始指向推算,定向的时间演化保证相对于地壳不产生残余的全球旋转,X轴由原点指向格林尼治参考子午线与地球赤道面(历元2000.0)的交点,Y轴与Z轴、X轴构成右手正交坐标系。采用广义相对论意义下的尺度。 2000国家大地坐标系,长半轴6378137m,扁率f=1/298.257222101,地心引力常数GM =3.986004418×1014m3s-2,自转角速度ω=7.292l15×10-5rads-1。 4、1984世界大地坐标系(WGS84坐标系WorldGeodeticSystem) wgs-84坐标系是美国国防部研制确定的大地坐标系,是一种协议地球坐标系。wgs-84坐标系的定义是:原点是地球的质心,空间直角坐标系的z轴指向bih(1984.0)定义的地极(ctp)方向,即国际协议原点cio,它由iau和iugg共同推荐。x轴指向bih定义的零度子午面和ctp 赤道的交点,y轴和z,x轴构成右手坐标系。wgs-84椭球采用国际大地测量与地球物理联合会第17届大会测量常数推荐值,采用的两个常用基本几何参数: 长半轴a=6378137m;扁率f=1:298.257223563。 GPS广播星历是以WGS-84坐标系为根据的。
常用坐标系与高程系简介
常用坐标系与高程系简介 2009-09-27 10:06:45| 分类:GIS技术| 标签:|字号大中小订阅 坐标系的概念 1.坐标系的定义: 如果空间上任意一点P的位置,可以用一组基于某一时间系统时刻t的空间结构的数学描述来确定,则这个空间结构可以称为坐标系,数学描述称为P点在该坐标系中的坐标。牛顿运动学原理要求坐标系是惯性的,惯性是每个物体所固有的当没有外力作用时保持静止或匀速直线运动的属性,基于这个特性,惯性坐标系的定义需与时间无关,通常这样的坐标系需要三个属性来描述(这应该是三维空间的本性吧),首先一个是原点(O),就是坐标系的中心点,第二个是过原点的任意直线(这里称为Z轴),第三个是过原点且与Z轴不重合的任意直线(这里称为X轴),如果X轴与Z轴垂直,会带来较优美的数学描述,我们称这样的坐标系是笛卡尔坐标系。P点的位置可以用P到原点的距离r,OP与Z轴的夹角,OP与X 轴的夹角来描述(当然也可以有其它等价描述),可以证明这个描述确定的P点是唯一的。 2.GPS领域常用坐标系模型: 在GPS测量中,最常用的坐标系模型是协议地球坐标系,该坐标系随同地球一起旋转,讨论随地球一起自转的目标位置,用这类坐标系方便;另外一类是协议天球坐标系,这个坐标系随同太阳系一同旋转,与地球自转无关,讨论卫星轨道运动时,用这类坐标系方便。 天球坐标系的定义是这样的,原点是地球质心(O),Z轴指向地球自转轴(天极,向北为正),X轴指向春分点,根据春分点的定义可以证明X轴与Z轴互相垂直,且X轴在赤道面上,同时为数学描述方便,引入与XOZ成右手旋转关系的Y轴。因为地球自转轴受其它天体影响(日、月)在空间产生进动,使得春分点变化(章动和岁差),导致用“瞬时天极”定义的坐标系不断旋转,而旋转的坐标系表现出非惯性的特性,不能直接应用牛顿定律。我们可以用某一历元时刻的天极和春分点(协议天极和协议春分点)定义一个三轴指向不变的天球 坐标系,称为固定极天球坐标系。 地球坐标系的定义是这样的,原点为地球质心(O),Z轴为地球自转轴,X轴指向地球上赤道的某一固定“刚性”点,所谓“刚性”是指其自转速度与地球一致,同时也为数学描述方便,引入与XOZ成右手旋转关系的Y轴。地球不是一个严格刚性的球体,Z轴在地球上随时间而变,称为极移,同天球坐标系一样,需要指定一个固定极为Z轴,这样的地球坐标系称为固定极地球坐标系。可以证明当观察地球上的物体时,该坐标系是惯性的。如果一个坐标系OXYZ,O不是地球质心,Z轴与地球自转轴平行,则这个坐标系具有与地球相同的自转角速度,我们也把此类坐标系称为地球坐标系。 3.协议坐标系统: 那么,什么是“协议”坐标系呢?通常,理论上坐标系由定义的坐标原点和坐标轴指向来确定。坐标系一经定义,任意几何点都具有唯一一组在该坐标系内的坐标值,反之,一组该坐标系内的坐标值就唯一定义了一个几何点。实际应用中,在已知若干参考点的坐标值后,通过观测又可反过来定义该坐标系。可以将前一种方式称为坐标系的理论定义。而由一系列已知点所定义的坐标系称为协议坐标系,这些已知参考点构成所谓的坐标框架。在点位坐标值不存在误差的情况下,这两种方式对坐标系的定义是一致的。事实上点位的坐标值通常是通过一定的测量手段得到,它们总是有误差的,由它们定义的协议坐标系与原来的理论定义的坐标系会有所不同,凡依据这些点测定的其它点位坐标值均属于这一协议坐标系而不属于理论定义的坐标系。由坐标框架定义的固定极天球坐标系和固定极地球坐标系,称为协议天 球坐标系和协议地球坐标系。
控制系统性能指标
控制系统性能指标
第五章线性系统的频域分析法 一、频率特性四、稳定裕度 二、开环系统的典型环节分解 五、闭环系统的频域性能指标 和开环频率特性曲线的绘制 三、频率域稳定判据 本章主要内容: 1 控制系统的频带宽度 2 系统带宽的选择 3 确定闭环频率特性的图解方法 4 闭环系统频域指标和时域指标的转换 五、闭环系统的频域性能指标
1 控制系统的频带宽度 1 频带宽度 当闭环幅频特性下降到频率为零时的分贝值以下3分贝时,对应的频率称为带宽频率,记为ωb。即当ω>ωb 而频率范围(0,ωb)称为系统带宽。 根据带宽定义,对高于带宽频率的正弦输入信号,系统输出将呈现较大的衰减,因此选取适当的带宽,可以抑制高频噪声的影响。但带宽过窄又会影响系统正弦输入信号的能力,降低瞬态响应的速度。因此在设计系统时,对于频率宽度的确定必须兼顾到系统的响应速度和抗高频干扰的要求。 2、I型和II型系统的带宽 2、系统带宽的选择 由于系统会受多种非线性因素的影响,系统的输入和输出端不可避免的存在确定性扰动和随机噪声,因此控制系统的带宽的选择需综合考虑各种输入信号的频率范围及其对系统性能的影响,即应使系统对输入信号具有良好的跟踪能力和对扰动信号具有较强的抑制能力。 总而言之,系统的分析应区分输入信号的性质、位置,根据其频谱或谱密度以及相应的传递函数选择合适带宽,而系统设计主要是围绕带宽来进行的。 3、确定闭环频率特性的图解方法
1、尼科尔斯图线 设开环和闭环频率特性为 4、闭环系统频域指标和时域指标的转换 工程中常用根据相角裕度γ和截止频率ω估算时域指标的两种方法。 相角裕度γ表明系统的稳定程度,而系统的稳定程度直接影响时域指标σ%、ts。 1、系统闭环和开环频域指标的关系 系统开环指标截止频率ωc与闭环带宽ωb有着密切的关系。对于两个稳定程度相仿的系统,ωc 大的系统,ωb也大;ωc小的系统,ωb也小。 因此ωc和系统响应速度存在正比关系,ωc可用来衡量系统的响应速度。又由于闭环振荡性指标谐振Mr和开环指标相角裕度γ都能表征系统的稳定程度。 系统开环相频特性可表示为
控制系统时域与频域性能指标的联系
控制系统时域与频域性能指标的联系 经典控制理论中,系统分析与校正方法一般有时域法、复域法、频域法。时域响应法是一种直接法,它以传递函数为系统的数学模型,以拉氏变换为数学工具,直接可以求出变量的解析解。这种方法虽然直观,分析时域性能十分有用,但是方法的应用需要两个前提,一是必须已知控制系统的闭环传递函数,另外系统的阶次不能很高。 如果系统的开环传递函数未知,或者系统的阶次较高,就需采用频域分析法。频域分析法不仅是一种通过开环传递函数研究系统闭环传递函数性能的分析方法,而且当系统的数学模型未知时,还可以通过实验的方法建立。此外,大量丰富的图形方法使得频域分析法分析高阶系统时,分析的复杂性并不随阶次的增加而显著增加。 在进行控制系统分析时,可以根据实际情况,针对不同数学模型选用最简洁、最合适的方法,从而使用相应的分析方法,达到预期的实验目的。 系统的时域性能指标与频域性能指标有着很大的关系,研究其内在联系在工程中有着很大的意义。 一、系统的时域性能指标 延迟时间t d 阶跃响应第一次达到终值h (∞)的50%所需的时间 上升时间 t r 阶跃响应从终值的10%上升到终值的90%所需的时间;对有振荡的系 统,也可定义为从0到第一次达到终值所需的时间 峰值时间t p 阶跃响应越过终值h (∞)达到第一个峰值所需的时间 调节时间 t s 阶跃响应到达并保持在终值h (∞)的±5%误差带内所需的最短时间 超调量%σ 峰值h( t p )超出终值h (∞)的百分比,即 %σ= () ()() ∞∞-h h h t p ?100% 二、系统频率特性的性能指标 采用频域方法进行线性控制系统设计时,时域内采用的诸如超调量,调整时间等描述系统性能的指标不能直接使用,需要在频域内定义频域性能指标。
测量中常用的坐标系统
测量中常用的坐标系统 [来源:本站 | 作者:原创 | 日期:2010年11月26日 | 浏览168次] 字体:[大中小] 1) 球面坐标系统 天文地理坐标系:以大地水准面为基准,以铅垂线为基准线,地面点在基准面上投影位置由天文经度(λ)和天文纬度(φ)确定。 大地坐标系:以参考椭球体面为基准面,以法线为基准线。地面点在椭球面上投影点的位置用大地经度L、大地纬度B表示。 2)空间直角坐标系:以参考椭球体的中心为坐标原 点,指向地球北极的方向为Z轴,首子午面与赤道的交线为X轴,Y轴垂直于xoz平面。 WGS-84坐标系(世界大地坐标系):采用WGS-84椭球,其坐标原点在地心,Z轴指向BIH1984.0定义的协议地球极(CTP)方向,X轴指向BIH1984.0的零子午面和CTP赤道的交点,Y轴与Z、X轴构成右手坐标系。也称全球地心坐标系。GPS卫星定位系统得到的地面点坐标就是WGS-84坐标。 3)高斯平面直角坐标系 地图投影:将球面上图形、数据按一定的数学法则转到平面上的方法。 X= F 1 (L,B) 或 X= F 1 (x, y, z)
Y= F 2 (L,B) Y= F 2 (x, y, z) 地图投影分类:按变形性质分为:等角投影、等积投影和任意投影。其中,等角投影保持角度不变,投影后任意一点各方向的长度比不变,从而在有限范围内使得投影平面上图形与椭球上保持相似。因此,等角投影也成为正形投影。 高斯投影:等角横切椭圆柱投影,又称高斯—克吕格投影。 a) 高斯投影的特点:中央子午线的投影为一条直线,且投影之后的长度无变形;其余子午线的投影均为凹向中央子午线的曲线,且以中央子午线为对称轴,离对称轴越远,其长度变形也就越大;赤道的投影为直线,其余纬线的投影为凸向赤道的曲线,并以赤道为对称轴;经纬线投影后仍保持相互正交的关系,即投影后无角度变形;中央子午线和赤道的投影相互垂直。 b) 分带法:为保证投影精度,限定投影的区域的方法——按经度分带。按投影带不同通常分为 6o带投影:从0o子午线开始,自西向东,每隔经差 6o为一个投影带,将椭球分成60个投影带,带号N 依次编为1~60。6o带可以满足1:25000以上中、小比
微机系统的主要性能指标
1.1.2微机系统的主要性能指标 微机系统和一般计算机系统一样,衡量其性能好坏的技术指标主要有以下五方面。 1. 字长 字长是计算机内部一次可以处理的二进制数码的位数。一般一台计算机的字长决定于它的通用寄存器、内存储器、ALU的位数和数据总线的宽度。字长越长,一个字所能表示的数据精度就越高;因此在完成同样精度的运算时,则数据处理速度越高。然而,字长越长,计算机的硬件代价相应也增大。为了兼顾精度/速度与硬件成本两方面,有些计算机允许采用变字长运算。 一般情况下,CPU的内、外数据总线宽度是一致的。但有的CPU为了改进运算性能,加宽了CPU的内部总线宽度,致使内部字长和对外数据总线宽度不一致。如Intel 8088/80188的内部数据总线宽度为16位,外部为8位。对这类芯片,称之为“准××位”CPU,因此Intel 8088/80188被称为“准16位”CPU。 2. 存储器容量 存储器容量是衡量计算机存储二进制信息量大小的一个重要指标。存储二进制信息的基本单位是位(b,bit)。一般把8个二进制位组成的通用基本单元叫做字节(B,Byte)。微机中通常以字节为单位表示存储容量,并且将1024B简称为1KB,1024KB简称为1MB(兆字节),1024MB 简称为1GB(吉字节),1024GB简称为1TB(太字节)。 存储器容量包括内存容量和外存容量。内存容量又分最大容量和实际装机容量。最大容量由CPU的地址总线位数决定,如8位CPU的地址总线为16位,其最大内存容量为64KB;Pentium处理器的地址总线为32位,其最大内存容量为4GB。而装机容量则由所用软件环境决定,如现行PC系列机,采用Windows环境,内存必须在4MB以上;采用Windows 95,内存必须在8MB以上;而采用Windows 98,内存必须在32MB以上等。 外存容量是指硬盘、软盘、磁带和光盘等的容量,通常主要指硬盘容量,其大小应根据实际应用的需要来配置。 目前市场上流行的Pentium系列微机大多具有几十至几百MB内存装机容量和几十、上百GB外存容量。 3. 运算速度 计算机的运算速度一般用每秒钟所能执行的指令条数来表示。由于不同类型的指令所需时间长度不同,因而运算速度的计算方法也不同。常用计算方法有: (1) 根据不同类型的指令出现的频度,乘上不同的系数,求得统计平均值,得到平均运算速度。这时常用MIPS (Millions of Instruction Per Second,即百万条指令/秒)作单位。 (2) 以执行时间最短的指令(如加法指令)为标准来估算速度。 (3) 直接给出CPU的主频和每条指令的执行所需的时钟周期。主频一般以MHz为单位。 4. 外设扩展能力 这主要指计算机系统配接各种外部设备的可能性、灵活性和适应性。一台计算机允许配接多少外部设备,对于系统接口和软件研制都有重大影响。在微机系统中,打印机型号、显示屏幕分辨率、外存储器容量等,都是外设配置中需要考虑的问题。 5. 软件配置情况 软件是计算机系统必不可少的重要组成部分,它配置是否齐全,直接关系到计算机性能的好坏和效率的高低。例如是否有功能很强、能满足应用要求的操作系统和高级语言、汇编语言,是否有丰富的、可供选用的工具软件和应用软件等,都是在购置计算机系统时需要考虑的。 平均指令周期=1/平均指令执行速度 =1/(100*10^8) =0.01 us