CREO六轴机械手的仿真运动图文教程
六自由度机械手因为运动轨迹复杂,坐标法显然不合适。所以本教程用快照法制作。
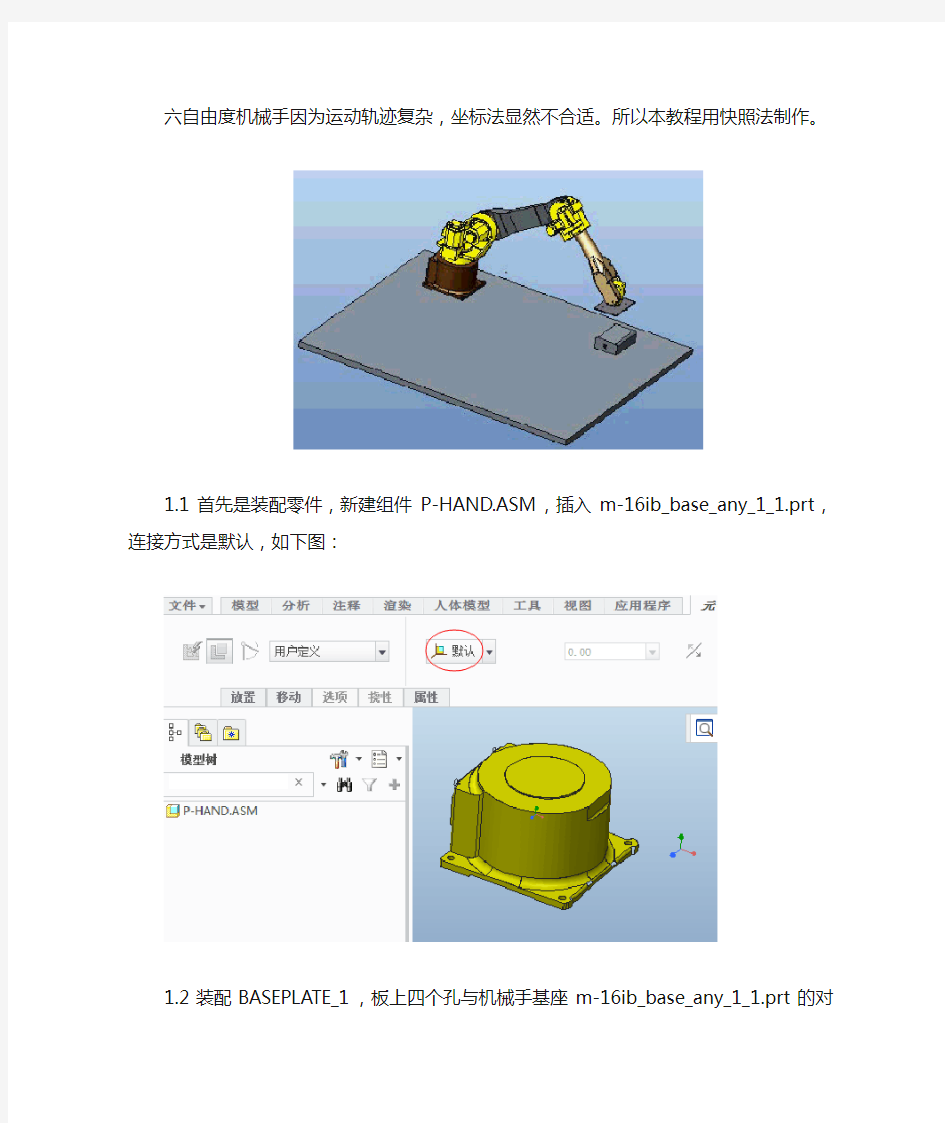
1.1首先是装配零件,新建组件P-HAND.ASM,插入m-16ib_base_any_1_1.prt,连接方式是默认,如下图:
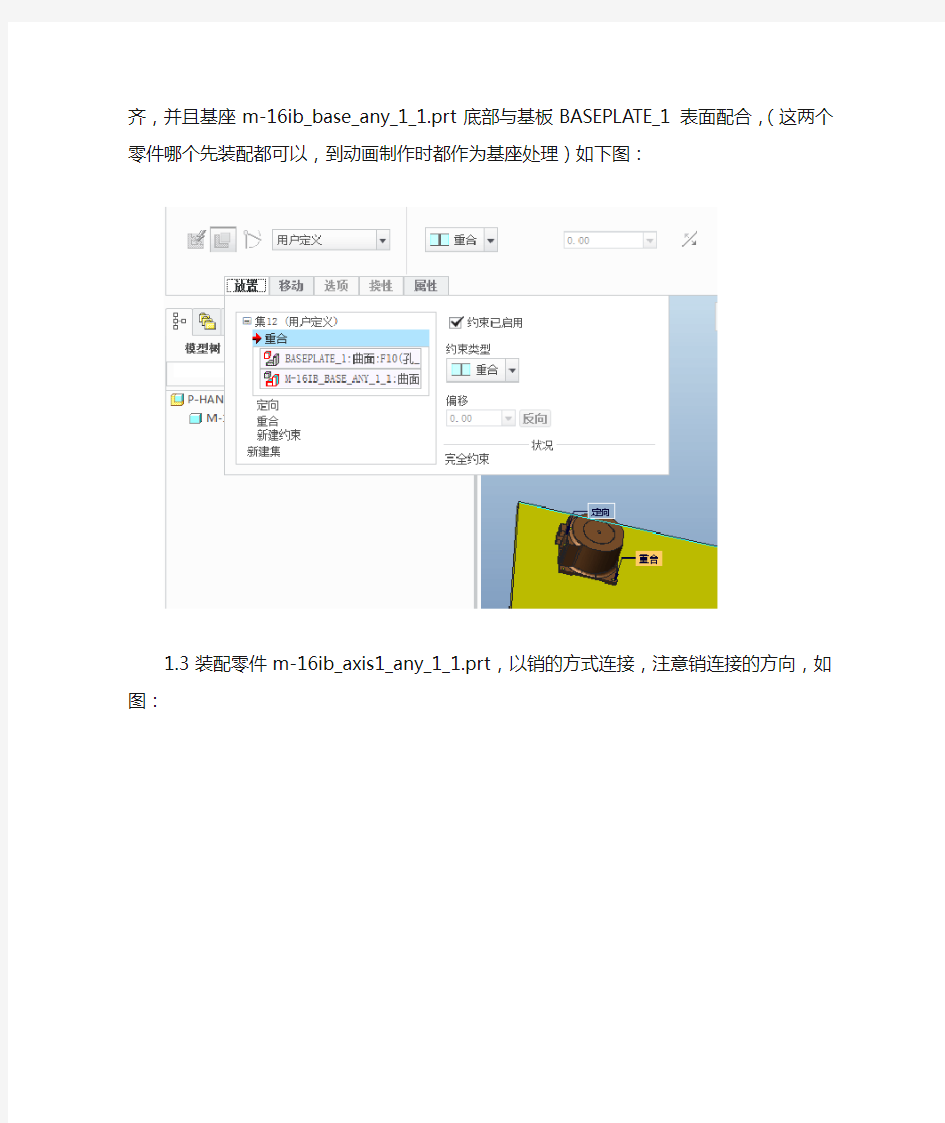
1.2装配BASEPLATE_1,板上四个孔与机械手基座m-16ib_base_any_1_1.prt 的对齐,并且基座m-16ib_base_any_1_1.prt底部与基板BASEPLATE_1表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图:
1.3装配零件m-16ib_axis1_any_1_1.prt,以销的方式连接,注意销连接的方向,如图:
1.4旋转轴对齐,当前位置输入0,勾选启用重新生成值。如下图:
1.5销连接方式装配m-16ib_axis2_any_1_1.prt,注意销连接的方向,如下图:
平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图:
旋转轴选择如下图的两个基准面,当前位置输入0,如下图:
当前位置输入-40,零件往如下图所示的方向偏40度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图:
点击设置零位置,勾选启用重新生成值,确定完成装配,如下图:
1.6装配零件m-16ib_axis3_any_1_1.prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图:
旋转轴选择下面两个基准面,如下图:
当前位置输入90,零件往如下图所示方向翻转90度(翻转的方向取决于销的连接方向),如下图:
点击设置零位置,勾选重新生成值,如下图:
装配零件m-16ib_axis4_any_1_1.prt,销连接,如下图:
旋转轴如下图:
装配零件m-16ib_axis5-6_any_1_1.prt,销连接,注意连接方向,如下图:
旋转轴设置如下图:
装配零件FIX_1,销连接,注意连接方向,如下图:
旋转轴的设置和前面的差不多,如下图:
物料装配,在这里不用约束,用户定义,放置设置成自动,如下图:
显示基准面,点击拖动元件,弹出对话框,点击约束—对齐两个图元,分别选择下图两个基准面,如下图:
点击对齐两个图元,分别选择下图两个曲面,如下图:
点击对齐两个图元,分别选择下图箭头的两个基准面,在下面的偏移,offset处输入-700,如下图:
机构运动创新设计..
课程设计报告 学生姓名:________________ 学号:_________________ 学院: ______________________________________________ 班级: ______________________________________________ 题目: _______________ 机构运动创新设计______________
2015年1月5日 目录 、概述................................. 1 .....................................................
一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2 、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3 、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D 机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行 机构运行。实验内容与步骤
Creo动态机构仿真操作手册完整版
C r e o动态机构仿真操 作手册 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
Creo2.0动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单
图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。 凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
槽轮机构运动学仿真
湖南农业大学工学院 课程设计说明书 课程名称:机械CAD/CAM课程设计 题目名称:槽轮机构运动学仿真 班级:20 11 级机制专业四班 姓名: 学号: 指导教师: 评定成绩: 教师评语: 指导老师签名: 20 年月日
目录 摘要 (1) 关键词 (1) 1 槽轮机构的结构组成和工作原理 (1) 2 零件三维实体模型建立的方法 (1) 2.1 主动转盘三维实体模型建立的方法 (1) 2.2 从动槽轮三维实体模型建立的方法 (3) 2.3 其他零件三维实体模型建立的方法 (4) 3 装配模型建立的方法和步骤 (6) 4 建立装配模型的运动仿真 (9) 5 装配模型的运动仿真分析 (13) 6 装配模型的运动仿真分析结论 (15) 7 装配模型图集 (16) 7.1 总成图 (16) 7.2 爆炸图 (16) 7.3 零件图 (17) 7.4 主动转盘工程图 (18) 8 总结 (19) 参考文献.......................................... (19)
槽轮机构运动学仿真 学生: (工学院,11-机制4班,学号) 摘要:槽轮机构是将主动拨盘的连续转动转化为从动槽轮的间歇转动,以达到间歇进给、转位和分度等工作要求。运用Pro/E软件对槽轮机构进行三维实体建模及装配,并运用模块进行运动仿真分析,得出机构的角速度、角加速度随时间变化的曲线。 关键词:槽轮机构;间歇运动;运动仿真 1、槽轮机构的结构组成和工作原理 槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。槽轮机构有外啮合和内啮合以及球面槽轮等。外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。槽轮机构典型结构由主动转盘、从动槽轮和机架组成。 2、零件三维实体模型建立的方法 2.1、主动转盘三维实体模型建立的方法 ②选择模板
机构运动创新设计..
课程设计报告 学生姓名:学号: 学院: 班级: 题目: 机构运动创新设计 指导教师:苏天一 2015 年 1 月5日
目录 一、概述 1 二、课程设计目的 1 三、课程设计要求和内容 1 四、原始数据及技术参数 2 五、设计原理及设备 2 六、机构自由度计算 5 七、机构动力分析与计算 7 八、机构运动分析与计算 9 十、参考文献 12
一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况 二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动要点
Creo原创教程(九),接触碰撞运动仿真解析,引申模具顶针顶出件运动 今天我们来讲一下接触碰撞运动的仿真(这个恐怕是坛子里对凸轮连接最详细的教程)
之前很多人pm还有在qq群问我说做模具顶出件运动怎么做, 我直接回答用凸轮连接对设置连接,启用升离,再启用重力就可以了,这样还是有很多人不太明白,其这个东西听着很简单,里面还有很多的窍门和方法 再加上一些经验,只要你看过了本教程,再加上平时多联系,相信接触碰撞这里,一般的问题都可以解决了,我们来看一下,以前的2001版本以前方针分 析里面比较简单,简单的方针都可以做到,但是到了野火版本以后,功能提升了好多,在野火中有三种特殊的连接,可以设置特殊连接后进行各种分析, 这三种连接分别为凸轮副连接,槽连接,齿轮运动副连接,今天讲的是接触碰撞的仿真,主要用到的是凸轮的链接,所以只讲凸轮,齿轮和槽连接以后再 讲。 顶针顶出件运动仿真,其实就是在顶针头部和接触的件之间建立一个凸轮连接,有人会问,顶针和件是两个平面与平面相碰,怎么建立凸轮,在凸轮连接 时,里面有一些技巧,尤其是建立曲面和选择曲面时,技巧性比较强,相信很多高手有些时候都那凸轮连接因没有选择好曲面或是没有建立好曲面,导致 仿真多次失败。 我们先看一下凸轮的链接设置
1 “凸轮1”选项卡:定义第一个凸轮 (1)“曲面/曲线”:单击箭头选取曲线或曲面定义凸轮工作面,在选取曲面时若钩选自动 选取复选框则系统自动选取与所选曲面相邻的任何曲面,凸轮与另一凸轮相互作用的 一侧由凸轮的法线方向指示。如果选取开放的曲线或曲面,会出现一个洋红色的箭头, 从相互作用的侧开始延伸,指示凸轮的法向。 选取的曲线或边是直的,“机械设计模块”会提示选取同一主体上的点、顶点、平面实 体表面或基准平面以定义凸轮的工作面。所选的点不能在所选的线上。工作面中会出现 一个洋红色箭头,指凸轮法向。
基于ADAMS的玩具飞机的机构运动仿真..
基于ADAMS的玩具飞机的机构运动仿真 摘要:本文首先对目前市场上涉及到的机械玩具进行了一个简要的概括,然后选取一款玩具飞机的模型分析了它的运动规律,并进行测绘利用SolidWorks建立了其总体结构;对玩具飞机的关键部件—发条机构进行了简要介绍,在运动学分析的基础上,运用虚拟样机仿真软件Adams对玩具飞机进行了仿真。结果表明:玩具飞机的运动是稳定的,基本和实际运动状态一致。 关键词:玩具飞机;ADAMS;运动学分析 Dynamic simulation of toy aircraft based on ADAMS Abstract: Firstly,mechanical toys on the market at present involved in a brief summary,and then choose a toy airplane model to analyze the movement rules of it,and mapping of SolidWorks was utilized to establish the overall structure; the key part of the toy plane clockwork mechanism are introduced,on the basis of kinematics analysis last,the application of virtual prototype simulation software Adams simulation of the toy plane. The results show that: the toy plane movement is stable,consistent with the basic and the actual state of motion. Key words:toy aircraft;ADAMS;kinematics analysis 1 引言 中国是世界上最大的玩具制造国和出口国,全球70%的玩具是在我国境内制造的。在琳琅满目的玩具之中,靠发条驱动的纯机械玩具吸引着许多小孩子的眼球这类玩具用塑料做成,价格低廉,体积较小,节能环保,大多模拟某一种动物的动作这类机械玩具在设计方面采用了大量的机械机构,如连杆机构,齿轮机构,凸轮机构,不完全齿轮机构,槽轮机构等,很多玩具的设计思想十分巧妙"对这些商品玩具进行测绘、建模、装配并做仿真,这对玩具的研发和设计,都具有重要的参考价值[2]。 然而,对机械玩具进行仿真的相关研究在国内期刊上很少见到"中科院自动化研究所的张志刚等从仿生学的角度出发,按照一系列步骤,编制了机器鱼的设计与仿真软件,实现了由生物特征到机器鱼实现的过渡,方便了机器鱼的设计[1]。在对玩具市场进行一番调研后发现,一款玩具飞机设计非常巧妙,也很有代表性,这里主要以它为例来阐述玩具的运动机理和y运动学仿真中的一些关键技术。 2 玩具飞机的运动原理及仿真方案 玩具飞机的虚拟仿真研究过程中,零件之间存在着各种相对关系,为得到理想的结 果,首先需要对玩具进行拆卸,然后分析出其零件间的连接关系,测绘出其零件的尺寸, 完成装配,为仿真准备好模型数据。玩具飞机的整体图如下:
槽轮实验指导书
机械工程基础实验 04 间歇机构实验 实 验 指 导 书 中国石油大学(北京) 机械与储运工程学院
实验四 间歇机构实验 在各类机械中, 常需要使某些构件实现周期性的运动和停歇。能将主动件的连续运动转换成从动件有规律的运动和停歇的机构, 称为间歇运动机构。其中,槽轮机构是各类机械中常用的实现间歇运动的典型机构。本实验主要针对外槽轮机构分析其运动特性。 【实验目的】 1. 了解槽轮机构的运动过程。 2. 学会槽轮机构间歇运动的分析。 3. 培养学生动手能力与数据分析能力。 【实验内容】 1.实验仪器 CL-I 槽轮机构实验台,其机构主要有四槽轮机构、五槽轮机构和六槽轮机构组成,主要用于检测几种平面槽轮机构的运动规律。 有关击鼓尺寸参数如下: 槽轮槽数:Z1=4,Z2=5,Z3=6 拨盘圆销数:n1=1,n2=1,n3=1 拔销滚子直径:d1=35mm ,d2=32mm ,d3=26mm 槽轮中心距:L1=L2=L3=160mm 槽轮外径:D1=278.96mm ,D2=260.86mm ,D3=278.34mm 2.工作原理 如图1所示,槽轮机构是由主动拨销轮、从动槽轮及机架组成,从动槽轮是由多个径向导槽所构成,各个导槽依次间歇地工作。当主动拨销轮轴匀速转过h θ角时, 拨销拨动槽轮转过一个分度角h τ, 拨销退出导槽;然后拨杆又转过( 2π-h θ) 角, 此时槽轮静止不动, 直到拨销进入下一个导槽内时, 再重复上述过程,槽轮的定位通常是利用拨销轮上外凸的锁止弧锁住, 从而实现槽轮的单向间歇运动。
图1 槽轮机构 如图2 所示, O1、O2 分别为从动槽轮和主动拨销轮的中心, A 、B 分别为拨销进入和退出导槽时的状态。由于拨销在进入和退出导槽时, 其速度方向与导槽的中心线方向保持一致, 因此在这2 个位置上, 拨销轮的半径与槽的中心线相互垂直。所以,h τ+h θ=π 。 图2 拨销进入和退出导槽轮的位置 槽轮机构相关参数:槽轮运动角: β2=z π2 拨盘运动角: α2=βπ2- 拨盘上圆销数目:() 22- 实验三机构运动参数测定 实验指导书 一、实验目的 1.利用计算机对平面机构结构参数进行优化设计,并且实现对该机构的运动进行仿真和测试分析,从而了解机构结构参数对运动情况的影响; 2.利用计算机对实际平面机构进行动态参数采集和处理,做出实测的机构动态运动和动力参数曲线,并与相应的仿真曲线进行对照,从而实现理论与实际的紧密结合; 3.利用计算机对机构进行平衡设置和调节,观察其运动不均匀状况和振动情况,进一步掌握平衡的意义和方法; 4.通过对平面机构中某一构件的运动、动力情况分析测定及整个机构运动波动及振动情况的测定分析,锻炼对于一般机械运动问题进行综合分析的能力。 二、实验设备和仪器 本实验所用仪器为:ZNH-A/1曲柄导杆滑块机构多媒体测试、仿真、设计综合实验台,ZNH-A/2曲柄摇杆机构多媒体测试、仿真、设计综合实验台,ZNH-A/3凸轮机构多媒体测试、仿真、设计综合实验台,ZNH-A/4槽轮机构多媒体测试、仿真、设计综合实验台。 1.ZNH-A/1曲柄导杆滑块机构多媒体测试、仿真、设计综合实验台 该实验台的测试机构一种形式为曲柄导杆滑块机构(如图3-1所示);还可拆装成另一种形式为曲柄滑块机构(如图3-2所示)。 图3-1 曲柄导杆滑块机构实验台图3-2 曲柄滑块机构实验台 2.ZNH-A/2曲柄摇杆机构多媒体测试、仿真、设计综合实验台 该实验台的测试机构如图3-3所示。 图3-3 曲柄摇杆机构实验台 3.ZNH-A/3凸轮机构多媒体测试、仿真、设计综合实验台 该实验台的测试机构一种形式为盘形凸轮机构(如图3-4所示),并配有四个不同运动 规律的测试凸轮;另一种形式为圆柱凸轮机构(如图3-5所示)。 图3-4 盘形凸轮机构实验台图3-5 圆柱凸轮机构实验台4.ZNH-A/4槽轮机构多媒体测试、仿真、设计综合实验台 该实验台的测试机构一种形式为四槽槽轮机构(如图3-6所示);另一种形式为八槽槽 轮机构(如图3-7所示)。 图3-6盘形凸轮机构实验台图3-7 圆柱凸轮机构实验台 目录 1 槽轮机构的应用 (1) 2 槽轮机构proe模型的建立 (3) 2.1 槽轮机构零件的建立 (3) 2.1.1 支架模型的建立 (4) 2.1.2 传动杆模型的建立 (5) 2.1.3 槽轮模型的建立 (6) 2.2 槽轮机构组件的装配 (7) 3 槽轮机构的仿真动力学分析 (8) 3.1 仿真运动的参数设置 (8) 3.1.1 凸轮副的建立 (8) 3.1.2 伺服电动机的定义 (9) 3.2 槽轮机构的动力学分析 (11) 3.2.1 测量的建立 (11) 3.2.2 槽轮机构分析 (12) 3.2.3 分析结果 (13) 3.3 总结 (17) 1 槽轮机构的应用 槽轮机构具有结构简单、制造容易、工作可靠和机械效率较高等优点。但是槽轮机构在工作时有冲击,随着转速的增加及槽数的减少而加剧,故不宜用于高速,其适用范围受到一定的限制。槽轮机构一般用于转速不是很高的自动机械、轻工机械和仪器仪表中。例如图1-1所示的电影放映机中的送片机构。由槽轮带动胶片,作有停歇的送进,从而形成动态画面。此外也常与其它机构组合,在自动生产线中作为工件传送或转位机构。如图1-2,为蜂窝煤制机模盘转位机构。 图1-1 电影胶片抓拍机构 图1-2 蜂窝煤制机模盘转位机构 2 槽轮机构proe模型的建立 2.1 槽轮机构零件的建立 槽轮机构主要由支架、传动杆和槽轮组成,其模型图如图2-1所示。 图2-1 槽轮机构模型 2.1.1 支架模型的建立 在proe软件中,新建“零件”,通过“草绘”和“拉伸“的操作,建立如图2-2 的支架零件。 图2-2 支架模型 “机械方案创意设计模拟实施” 实验教程 西南交通大学卢存光著 西南交通大学 国家级机械基础实验教学示范中心 2006年3月 机械方案创意设计模拟实施实验教程1 第五章机构创新设计 实验15 机械方案创意设计模拟实施实验 一、实验目的 (1)加深学生对机构组成原理的认识,进一步了解机构组成及其运动特性。 (2)培养学生运用实验方法,研究、分析机械的初步能力。 (3)培养学生运用实验方法,自行构思创新、试凑选型机械运动方案,调整、优化机构参数,进而验证、确定机械运动方案和参数。 (4)使学生了解(教材未涉及的)构件干涉问题及其解决方法。 (5)培养学生用电机、控制盒等电气元件和气缸、电磁阀、调速阀、空气压缩机等气动元件组装出动力源,对机械进行动力驱动和控制的初步能力。 (6)培养学生动脑创新设计,进而动手付诸工程实践的综合能力。 二、实验内容 成功的设计往往始于方案的创新,而机械运动方案的选择至今缺乏实用化的理论导向。本实验的核心是以西南交通大学研制的“机械方案创意设计模拟实施实验仪”为设计手段,针对有工程背景和一定难度的设计题目,指导学生使用该实验仪的多功能零件,进行积木式组合调整,从而让学生自己构思创新、试凑选型机械设计方案,亲手按比例组装实物机构模型,亲手安装电机并连接电路,亲手安装气缸并组装气动系统;模拟真实工况,动态操纵、演示、观察机构的运动情况和传动性能;通过直观调整机械方案、构件布局、连接方式及尺寸以及更改动力和控制系统,来验证和改进设计,使该模型机构能够灵活、可靠地按照设计要求运动到位。也就是通过创意实验——模拟实施环节来实现培养学生创新动手能力的教学改革目标。 三、实验设备及材料 (1)机械方案创意设计模拟实施实验仪。 (2)系列转速微型电动机、四路电气控制盒、负载线和其他电气辅件。 (3)系列行程微型气缸、过滤减压器、电磁换向阀、调速阀、气管和空气压缩机等气动元件及辅件。 (4)螺丝、螺母、垫圈等紧固件。 槽轮机构ADAMS机构分析报告 一、题目分析 1、题目 题20 图1 如上图所示,这个设计将一个行星轮并入到传动机构中来。输出轴的运动周期减少,最大角速度比具有相同沟槽数的未改进的槽轮机构的大。曲柄轮的一个驱动单元由行星轮b和传动滚c组成。传动滚轴与行星节圆上的一点同线。因为行星轮沿固定的太阳轮d转动,传动滚c轴的轨迹是一个心形的曲线e。为防止圆滚妨碍锁紧盘f,弧度g应该比未改进时槽轮所要求的大。 2、机构运动简图 传动滚 槽轮行星轮 锁紧盘太阳轮 机架 图2 3、尺寸预确定 (1)太阳轮:模数5,齿数40,厚50mm (2)行星轮:模数5,齿数40,厚50mm,孔径d=40 (3)锁紧盘:直径500mm,圆弧直径320mm,厚40mm (4)槽轮:直径500mm,槽宽30mm,长宽为:480mm,厚度40mm (5)传动滚:长100mm,宽80mm,厚20mm,滚直径30mm (6)输入圆盘:直径450mm,孔径40mm,厚50mm 二、分析目的 根据题意,要求输入盘,每转动一圈,槽轮就转过90°,并且不断循环下去。从动力传递的顺序来分析,动力是由输入盘传递给传动滚与行星轮组成的曲柄轮,然后由传动滚传递给槽轮,再由槽轮轮传递给输出轴,因为行星轮与太阳 轮之间的齿轮副的传动是平稳的,所以输出轴的一些运动信息可以通过对槽轮的测量来获取。下面将对槽轮转动的情况做简要的分析: 1、运动要求: 若以图2所示位置为初始位置,输入盘的转动方向为顺时针,当输入盘转动时带动曲柄轮转动,同时传动滚与槽轮接触并带动槽轮转动,当输入盘转过一定角度时,传动滚与槽轮分离,锁止盘与槽轮接合将槽轮锁止,槽轮不转动,当输入盘再次转过一定角度后,锁止盘与槽轮分离,传动滚再次与槽轮接合带动槽轮转动,槽轮就是如此间歇运行下去。 图3 2、力的要求: 在实际机构中,总是存在着各种各样的摩擦,因此在槽轮与输入盘的转动副上需要添加摩擦力;在传动滚与槽轮以及锁止盘与槽轮接合时应该添加接触力,接触时会有能量的损失,所以在接触力的设置时应有摩擦的设置。在ADAMS/View中有两种计算接触力的方法,一种是补偿法(Restitution);另一种是冲击函数法(Impact)。补偿法需要确定两个参数:惩罚系数(Penalty)和 Creo2.0动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 1 图1-2 机构模块下的主界面图 图1-3 机构菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 设置。 凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。 齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现 有的齿轮副。 伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。 执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。 弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。 阻尼器:打开“阻尼器”对话框,使用此对话框可定义阻尼器,也可编辑、移除或复制现有的阻尼器。 力/扭矩:打开“力/扭矩”(对话框,使用此对话框可定义力或扭矩。也可编辑、移除或复制现有的力/扭矩负荷。 重力:打开“重力” 对话框,可在其中定义重力。 初始条件:打开“初始条件”对话框,使用此对话框可指定初始位置快照,并可为点、连接轴、主体或槽定义速度初始条件。 质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的密度。 拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。 连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运行组 件分析。 分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。 回放:打开“回放” 对话框,使用此对话框可回放分析运行的结果。也可将结果保存到一个文件中、恢复先前保存的结果或输出结果。 测量:打开“测量结果”对话框,使用此对话框可创建测量,并可选取要显示的测量和结果集。也可以对结果出图或将其保存到一个表中。 轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线 除了这些主要的菜单和工具外。还有几个零散的菜单需要注意。 2.1 【编辑】菜单 重定义主体:打开“重定义主体” 对话框,使用此对话框可移除组件中主体的组件约束。通过单击箭头选择零件后,对话框显示已经定义好的约束,元件和组建参照,设计者可以移除约束,重新指定元件或组件参照,如图1-6所示。 设置:打开“设置” 对话框,使用此对话框可指定"机械设计"用来装配机构的公差,也可指定在分析运行失败时“机械设计”将采取的操作。如是否发出警告声,操作失败时是否暂停运行或是继续运行等等,该配置有利于设计者高效率的完成工作。 3 动态机构仿真操作手册 1 范围 本标准规定了动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 图1-2 机构模块下的主界面图 图1-3 机构菜单 图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下: 连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。 :打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。 打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复 Creo2.0 动态机构仿真操作手册 1 范围 本标准规定了Creo2.0动态机构仿真建模方法及思路。 本标准适用于公司产品结构设计选用。 2 Creo2.0机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。 design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图 精选 图1-2 机构模块下的主界面图 图1-3 机构菜单 图1-4 模型树菜单 如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。 凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编 辑或删除现有的凸轮从动机构。 3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触 从动机构,也可编辑或删除现有的3D接触从动机构。 齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。 伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移 除或复制现有的伺服电动机。 执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。 弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。 阻尼器:打开“阻尼器”对话框,使用此对话框可定义阻尼器,也可编辑、移除或复制现有的阻尼器。 力/扭矩:打开“力/扭矩”(对话框,使用此对话框可定义力或扭矩。也可编辑、移除或复制现有的力/扭矩负荷。 重力:打开“重力” 对话框,可在其中定义重力。 初始条件:打开“初始条件”对话框,使用此对话框可指定初始位置快照,并可为点、连接轴、主体或槽定义速度初始条件。 质量属性:打开“质量属性”对话框,使用此对话框可指定零件的质量属性,也可指定组件的密度。 拖动:打开“拖动”对话框,使用此对话框可将机构拖动至所需的配置并拍取快照。 连接:打开“连接组件”对话框,使用此对话框可根据需要锁定或解锁任意主体或连接,并运行组件分析。 分析:打开“分析”对话框,使用此对话框可添加、编辑、移除、复制或运行分析。 回放:打开“回放” 对话框,使用此对话框可回放分析运行的结果。也可将结果保存到一个文件中、恢复先前保存的结果或输出结果。 测量:打开“测量结果”对话框,使用此对话框可创建测量,并可选取要显示的测量和结果集。也可以对结果出图或将其保存到一个表中。 轨迹曲线:打开“轨迹曲线”对话框,使用此对话框生成轨迹曲线或凸轮合成曲线 除了这些主要的菜单和工具外。还有几个零散的菜单需要注意。 2.1 【编辑】菜单 重定义主体:打开“重定义主体” 对话框,使用此对话框可移除组件中主体的组件约束。通过单击箭头选择零件后,对话框显示已经定义好的约束,元件和组建参照,设计者可以移除约束,重新指定元件或组件参照,如图1-6所示。 设置:打开“设置” 对话框,使用此对话框可指定"机械设计"用来装配机构的公差,也可指定在分析运行失败时“机械设计”将采取的操作。如是否发出警告声,操作失败时是否暂停运行或是继续运行等等,该配置有利于设计者高效率的完成工作。 精选机构运动参数测定 机械原理实验指导书 曲柄摇杆模拟仿真C语言程序
基于proe的槽轮机构动力学仿真
机械方案创意实验教程2006版
槽轮机构ADAMS机构分析报告
Creo机构动态仿真教程
Creo动态机构仿真操作手册
Creo-2.0动态机构仿真操作手册