ABB机器人坐标系说明介绍
术语和概念说明
什么是坐标系?<-->
-
概述坐标系从一个称为原点的固定点通过轴定义平面或空间。机器人目标和位置通过沿坐标系轴的测量来定位.
机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或
编程。
?基坐标系位于机器人基座。它是最便于机器人从一个位置移动到另一个位置的坐标系。详情请参阅基坐标系.
?工件坐标系与工件相关,通常是最适于对机器人进行编程的坐标系。详情请参阅工件坐标系.
?工具坐标系定义机器人到达预设目标时所使用工具的位置。详情请参阅工具坐标系.
?大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。它适用于微动控制、一般移动以及处理
具有若干机器人或外轴移动机器人的工作站和工作单元。详情
请参阅大地坐标系.
?用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。详情请参阅用户坐标系.
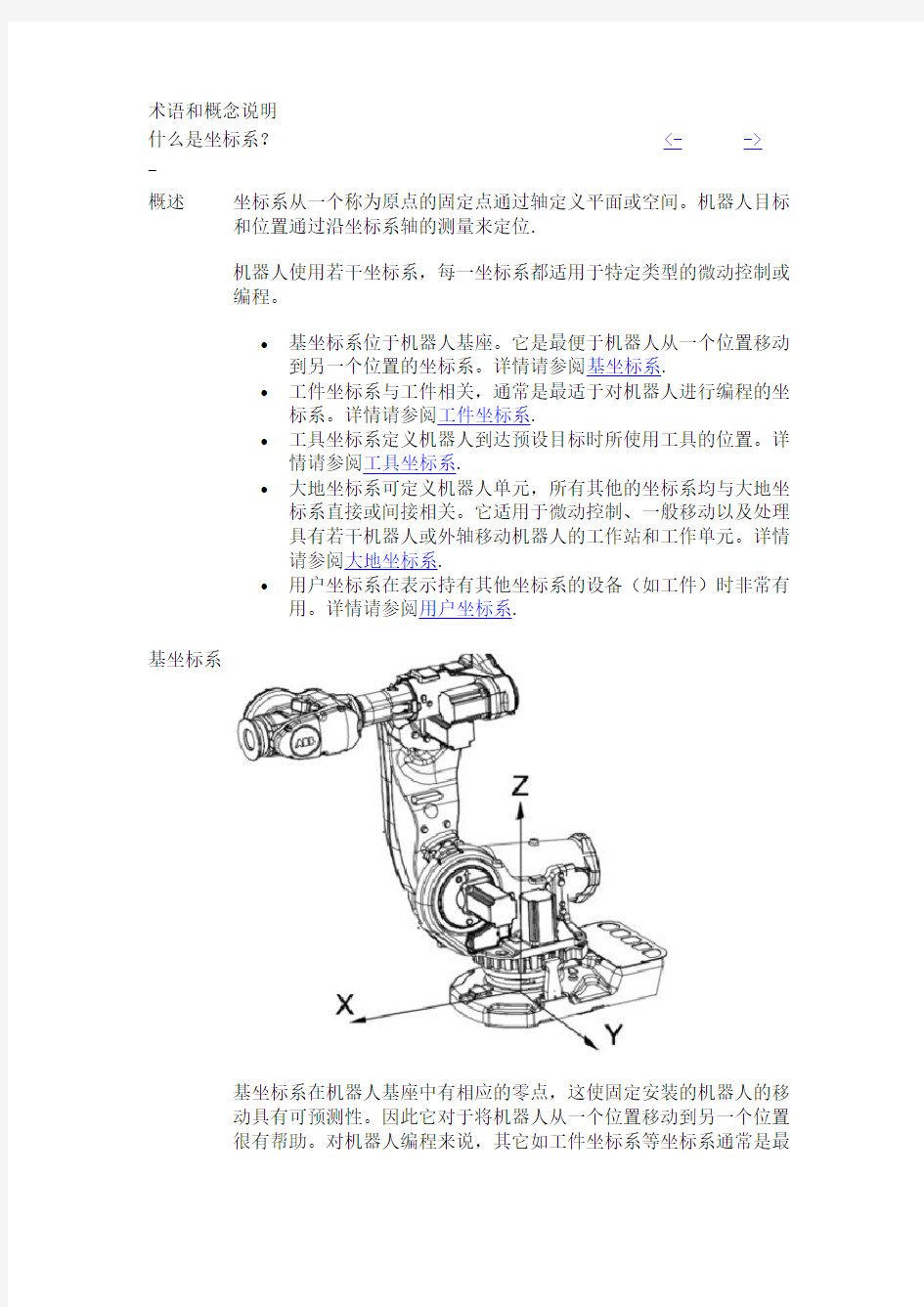
基坐标系
基坐标系在机器人基座中有相应的零点,这使固定安装的机器人的移
动具有可预测性。因此它对于将机器人从一个位置移动到另一个位置
很有帮助。对机器人编程来说,其它如工件坐标系等坐标系通常是最
佳选择。详情请参阅工件坐标系.
在正常配置的机器人系统中,当您站在机器人的前方并在基坐标系中
微动控制,将控制杆拉向自己一方时,机器人将沿 X 轴移动;向两侧
移动控制杆时,机器人将沿 Y 轴移动。扭动控制杆,机器人将沿 Z 轴
移动.
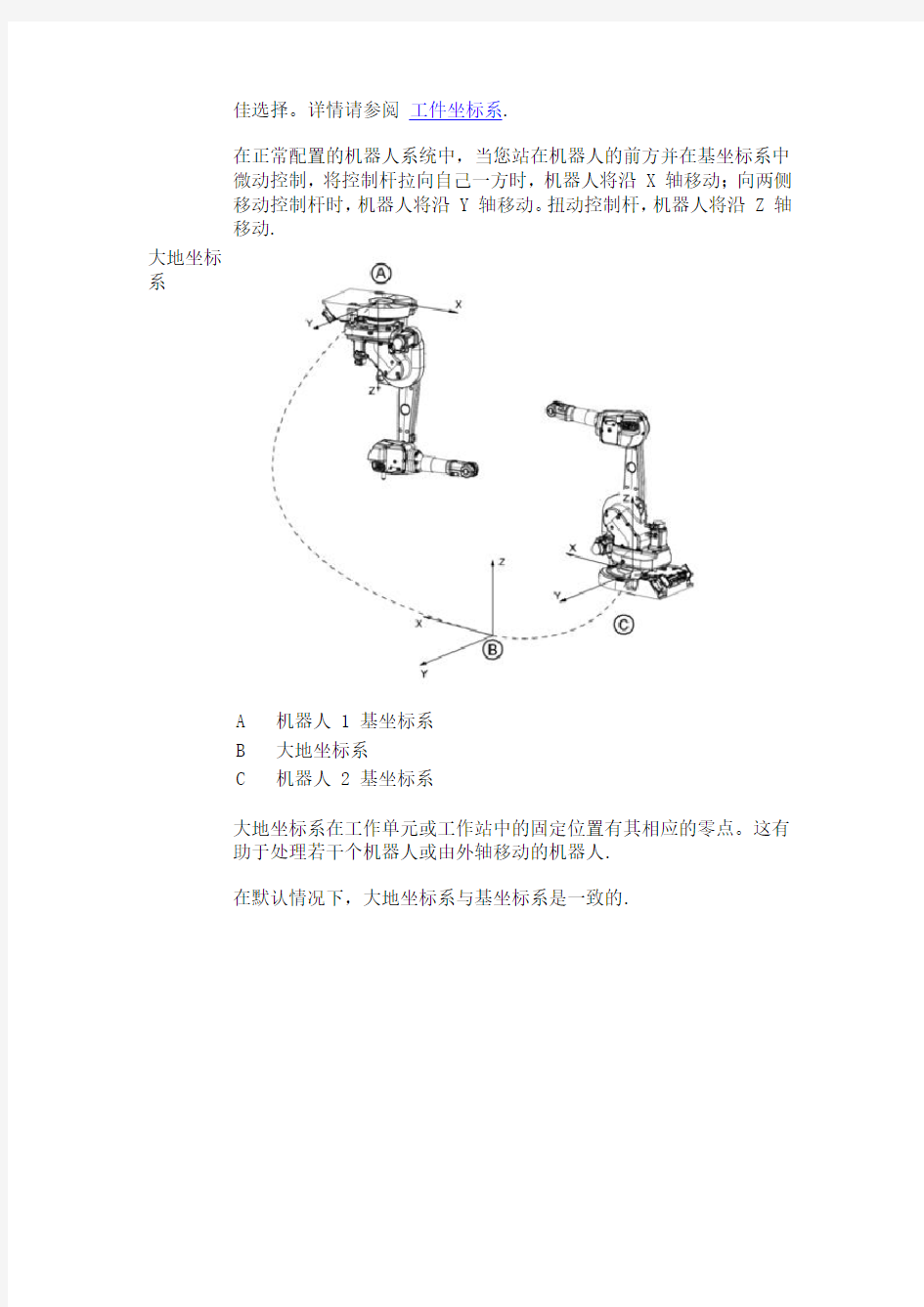
大地坐标
系
A 机器人 1 基坐标系
B 大地坐标系
C 机器人 2 基坐标系
大地坐标系在工作单元或工作站中的固定位置有其相应的零点。这有
助于处理若干个机器人或由外轴移动的机器人.
在默认情况下,大地坐标系与基坐标系是一致的.
工件坐标
系
A 大地坐标系
B 工件坐标系 1
C 工件坐标系 2
工件坐标系对应工件:它定义工件相对于大地坐标系(或其它坐标系)
的位置.
工件坐标系必须定义于两个框架:用户框架(与大地基座相关)和工
件框架(与用户框架相关).
机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同一
工件在不同位置的若干副本.
您对机器人进行编程时就是在工件坐标系中创建目标和路径。这带来
很多优点::
?重新定位工作站中的工件时,您只需更改工件坐标系的位置,所有路径将即刻随之更新.
?允许操作以外轴或传送导轨移动的工件,因为整个工件可连同
其路径一起移动.
位移坐标
系
A 原始位置
B 工件坐标系
C 新位置
D 位移坐标系
有时,会在若干位置对同一对象或若干相邻工件执行同一路径。为了
避免每次都必须为所有位置编程,可以定义一个位移坐标系。
此坐标系还可与搜索功能结合使用,以抵消单个部件的位置差异。
位移坐标系基于工件坐标系而定义。
工具坐标
系
工具坐标系将工具中心点设为零位。它会由此定义工具的位置和方
向。工具坐标系经常被缩写为 TCPF (Tool Center Point Frame),
而工具坐标系中心缩写为 TCP (Tool Center Point).
执行程序时,机器人就是将 TCP 移至编程位置。这意味着,如果您要
更改工具(以及工具坐标系),机器人的移动将随之更改,以便新的 TCP
到达目标.
所有机器人在手腕处都有一个预定义工具坐标系,该坐标系被称为
tool0。这样就能将一个或多个新工具坐标系定义为tool0的偏移值.
微动控制机器人时,如果您不想在移动时改变工具方向(例如移动锯
条时不使其弯曲),工具坐标系就显得非常有用.
用户坐标
系
A 用户坐标系
B 大地坐标系
C 工件坐标系
D 移动用户坐标系
E 工件坐标系,与用户坐标系一同移动
用户坐标系可用于表示固定装置、工作台等设备。这就在相关坐标系
链中提供了一个额外级别,有助于处理持有工件或其它坐标系的处理
设备.
工业机器人常用坐标系介绍
工业机器人常用坐标系介绍 坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标 系统。 坐标系包含:1、基坐标系(Base Coordinate System) 2、大地坐标系(World Coordinate System) 3、工具坐标系(Tool Coordinate System) 4、工件坐标系(Work Object Coordinate System) 1、工具坐标系机器人工具座标系是由工具中心点TCP 与座标方位组成。 机器人联动运行时,TCP 是必需的。 1) Reorient 重定位运动(姿态运动)机器人TCP 位置不变,机器人工具沿座标轴转动,改变姿态。 2) Linear 线性运动机器人工具姿态不变,机器人TCP 沿座标轴线性移动。机器人程序支持多个TCP,可以根据当前工作状态进行变换。 机器人工具被更换,重新定义TCP 后,可以不更改程序,直接运行。 1.1.定义工具坐标系的方法:1、N(N=4)点法/TCP 法-机器人TCP 通过N 种不同姿态同某定点相碰,得出多组解,通过计算得出当前TCP 与机器人手腕中心点( tool0 ) 相应位置,座标系方向与tool0 一致。 2、TCPZ 法-在N 点法基础上,Z 点与定点连线为座标系Z 方向。 3、TCPX,Z 法-在N 点法基础上,X 点与定点连线为座标系X 方向,Z 点与定点连线为座标系Z 方向。 2. 工件坐标系机器人工件座标系是由工件原点与座标方位组成。 机器人程序支持多个Wobj,可以根据当前工作状态进行变换。 外部夹具被更换,重新定义Wobj 后,可以不更改程序,直接运行。
工业机器人的工具坐标系、工件坐标系、世界坐标系标定
第3章机器人的坐标系及标定 机器人的坐标系是机器人操作和编程的基础。无论是操作机器人运动,还是对机器人进行编程,都需要首先选定合适的坐标系。机器人的坐标系分为关节坐标系、机器人坐标系、工具坐标系、世界坐标系和工件坐标系。通过本章的内容,掌握这几种坐标系的含义其标定方法。 3.1 实验设备 六自由度机器人 3.2 机器人的坐标系 对机器人进行轴操作时,可以使用以下几种坐标系: (1)关节坐标系—ACS(Axis Coordinate System) 关节坐标系是以各轴机械零点为原点所建立的纯旋转的坐标系。机器人的各个关节可以独立的旋转,也可以一起联动。 (2)机器人(运动学)坐标系—KCS(Kinematic Coordinate System) 机器人(运动学)坐标系是用来对机器人进行正逆运动学建模的坐标系,它是机器人的基础笛卡尔坐标系,也可以称为机器人基础坐标系或运动学坐标系,机器人工具末端(TCP)在该坐标系下可以进行沿坐标系X轴、Y轴、Z轴的移动运动,以及绕坐标系轴X轴、Y轴、Z轴的旋转运动。 (3)工具坐标系—TCS(Tool Coordinate System) 将机器人腕部法兰盘所持工具的有效方向作为工具坐标系Z轴,并把工具坐标系的原点定义在工具的尖端点(或中心点)TCP(TOOL CENTER POINT)。 但当机器人末端未安装工具时,工具坐标系建立在机器人的法兰盘端面中心点上,Z轴方向垂直于法兰盘端面指向法兰面的前方。 当机器人运动时,随着工具尖端点(TCP)的运动,工具坐标系也随之运动。用户可以选择在工具坐标系下进行示教运动。TCS坐标系下的示教运动包括沿工具坐标系的X轴、Y轴、Z轴的移动运动,以及绕工具坐标系轴X轴、Y轴、Z轴的旋转运动。 (4)世界坐标系—WCS(World Coordinate System) 世界坐标系是空间笛卡尔坐标系。运动学坐标系和工件坐标系的建立都是参照世界坐标系建立的。在没有示教配置的情况下,默认的世界坐标系和机器人运动学坐标系重合。在世界坐标系下,机器人工具末端可以沿坐标系X轴、Y轴、Z轴进行移动运动,以及绕坐标系轴X轴、Y轴、Z轴旋转运动。 (5)工件坐标系—PCS(Piece Coordinate System) 工件坐标系是建立在世界坐标系下的一个笛卡尔坐标系。机器人沿所指定的工件 18