TLC320AD50C与DSP接口设计
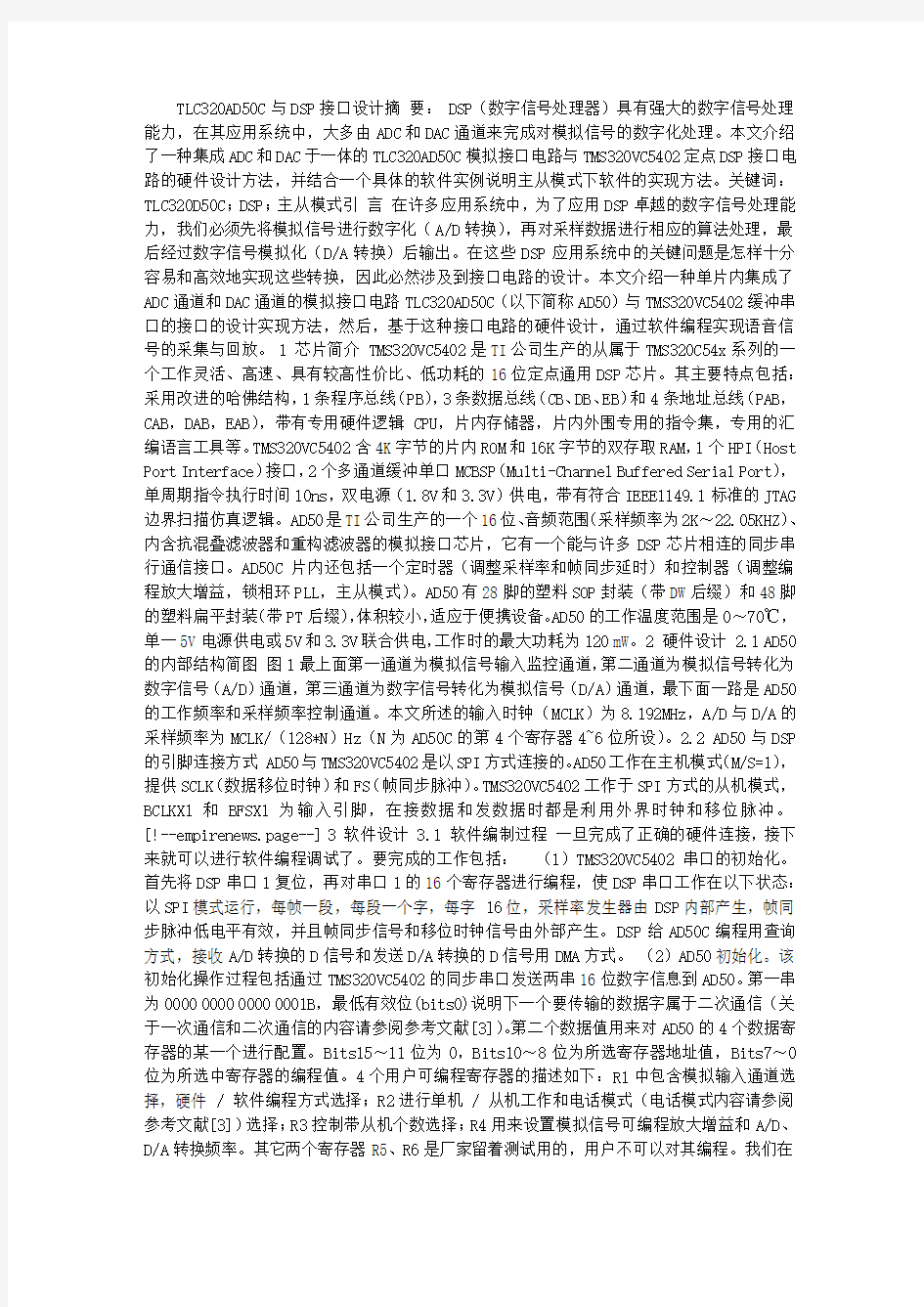
TLC320AD50C与DSP接口设计摘要: DSP(数字信号处理器)具有强大的数字信号处理能力,在其应用系统中,大多由ADC和DAC通道来完成对模拟信号的数字化处理。本文介绍了一种集成ADC和DAC于一体的TLC320AD50C模拟接口电路与TMS320VC5402定点DSP接口电路的硬件设计方法,并结合一个具体的软件实例说明主从模式下软件的实现方法。关键词:TLC320D50C;DSP;主从模式引言在许多应用系统中,为了应用DSP卓越的数字信号处理能力,我们必须先将模拟信号进行数字化(A/D转换),再对采样数据进行相应的算法处理,最后经过数字信号模拟化(D/A转换)后输出。在这些DSP应用系统中的关键问题是怎样十分容易和高效地实现这些转换,因此必然涉及到接口电路的设计。本文介绍一种单片内集成了ADC通道和DAC通道的模拟接口电路TLC320AD50C(以下简称AD50)与TMS320VC5402缓冲串口的接口的设计实现方法,然后,基于这种接口电路的硬件设计,通过软件编程实现语音信号的采集与回放。 1 芯片简介 TMS320VC5402是TI公司生产的从属于TMS320C54x系列的一个工作灵活、高速、具有较高性价比、低功耗的16位定点通用DSP芯片。其主要特点包括:采用改进的哈佛结构,1条程序总线(PB),3条数据总线(CB、DB、EB)和4条地址总线(PAB,CAB,DAB,EAB),带有专用硬件逻辑CPU,片内存储器,片内外围专用的指令集,专用的汇编语言工具等。TMS320VC5402含4K字节的片内ROM和16K字节的双存取RAM,1个HPI(Host Port Interface)接口,2个多通道缓冲单口MCBSP(Multi-Channel Buffered Serial Port),单周期指令执行时间10ns,双电源(1.8V和3.3V)供电,带有符合IEEE1149.1标准的JTAG 边界扫描仿真逻辑。 AD50是TI公司生产的一个16位、音频范围(采样频率为2K~22.05KHZ)、内含抗混叠滤波器和重构滤波器的模拟接口芯片,它有一个能与许多DSP芯片相连的同步串行通信接口。AD50C片内还包括一个定时器(调整采样率和帧同步延时)和控制器(调整编程放大增益,锁相环PLL,主从模式)。AD50有28脚的塑料SOP封装(带DW后缀)和48脚的塑料扁平封装(带PT后缀),体积较小,适应于便携设备。AD50的工作温度范围是0~70℃,单一5V电源供电或5V和3.3V联合供电,工作时的最大功耗为120 mW。 2 硬件设计 2.1 AD50的内部结构简图图1最上面第一通道为模拟信号输入监控通道,第二通道为模拟信号转化为数字信号(A/D)通道,第三通道为数字信号转化为模拟信号(D/A)通道,最下面一路是AD50的工作频率和采样频率控制通道。本文所述的输入时钟(MCLK)为8.192MHz,A/D与D/A的采样频率为MCLK/(128*N)Hz(N为AD50C的第4个寄存器4~6位所设)。2.2 AD50与DSP 的引脚连接方式 AD50与TMS320VC5402是以SPI方式连接的。AD50工作在主机模式(M/S=1),提供SCLK(数据移位时钟)和FS(帧同步脉冲)。TMS320VC5402工作于SPI方式的从机模式,BCLKX1和BFSX1为输入引脚,在接数据和发数据时都是利用外界时钟和移位脉冲。[!--empirenews.page--] 3 软件设计 3.1 软件编制过程一旦完成了正确的硬件连接,接下来就可以进行软件编程调试了。要完成的工作包括:(1)TMS320VC5402串口的初始化。首先将DSP串口1复位,再对串口1的16个寄存器进行编程,使DSP串口工作在以下状态:以SPI模式运行,每帧一段,每段一个字,每字16位,采样率发生器由DSP内部产生,帧同步脉冲低电平有效,并且帧同步信号和移位时钟信号由外部产生。DSP给AD50C编程用查询方式,接收A/D转换的D信号和发送D/A转换的D信号用DMA方式。(2)AD50初始化。该初始化操作过程包括通过TMS320VC5402的同步串口发送两串16位数字信息到AD50。第一串为0000 0000 0000 0001B,最低有效位(bits0)说明下一个要传输的数据字属于二次通信(关于一次通信和二次通信的内容请参阅参考文献[3])。第二个数据值用来对AD50的4个数据寄存器的某一个进行配置。Bits15~11位为0,Bits10~8位为所选寄存器地址值,Bits7~0位为所选中寄存器的编程值。4个用户可编程寄存器的描述如下:R1中包含模拟输入通道选择,硬件 / 软件编程方式选择;R2进行单机 / 从机工作和电话模式(电话模式内容请参阅参考文献[3])选择;R3控制带从机个数选择;R4用来设置模拟信号可编程放大增益和A/D、D/A转换频率。其它两个寄存器R5、R6是厂家留着测试用的,用户不可以对其编程。我们在
以下例程中对4个可编程寄存器编程,使AD50C工作在以下状态:选择INP/INM为工作模拟输入,15+1位ADC和15+1位DAC模式,不带从机,采样频率为10.67KHz,模拟信号输入和输出放大增益均为0dB。(3)用户代码的编写。完成音频信号采集与回放代码的编制。本设计给AD50编程用查询方式,接收A/D转换的D信号和发送D/A转换的D信号用DMA方式。
3.2 软件具体实现(1) 程序流程图:(2)部分关键代码:Ⅰ, TMS320VC5402中断及串口初始化……stm#0002h,48hstm#0040h,49h; 设置DSP串口1工作在每帧一个字,每个字16位模式……stm#0006h,48hstm#0100h,49h; 设置CLKGDV=0,使串口1工作在最大频率stm#0007h,48hstm#0a000h,49h;设置CLKSM=1,采样率发生器时钟由DSP内部产生stm#000eh,48hstm#0008h,49h;设置FSXP=1,使帧同步脉冲低电平有效stm#0080h,imr ;DMA一通道中断使能rsbx intm;开放所有可屏蔽中断……Ⅱ, AD50初始化ld#0001h,a;D0=1,请求第二次交流stlma,43h;向TLC320AD50C写数据aa:stm#0001h,48hldm49h,aand#0002h,abcaa,aeq;数据是否被TLC320AD50C接收ld#0180h,a;给TLC320AD50C的寄存器1编程,使其复位stlma,43hbb:stm#0001h,48hldm49h,aand#0002h,abcbb,aeq;编程数据是否被TLC320AD50C接收……stm#0100h,a;TLC320AD50C脱离复位并且设置寄存器1,使INP,INM为输入……stm#0200h,a;设置TLC320AD50C寄存器2,使电话模式无效……stm#0460h,a;设置TLC320AD50C寄存器4,使采样频率为10.667KHz[!--empirenews.page--]……stm#0300h,a;设置TLC320AD50C寄存器3,使带0个从机……Ⅲ, DMA1通道初始化stm#05h,55h;选择DMA1通道stm#0041h,56h;设置串口1接收端为DMA事件的源地址stm#027fh,56h;设置DMA事件的目的地址stm#3000h,56h;设置直接传送数据个数stm#5000h,56h;设置串口1同步模式,一帧接收一个字stm#404dh,56h;设置DMA为多帧模式,源地址不调整目的地址[1][2]下一页按57h的值调整stm#20h,55hstm#0001h,57h;设置目的地址为自动加1调整stm#0282h,54h;设置通道1为高优先级并使能通道1…… 4 实验结果下面图中图4和图6分别为TLC320AD50C与TMS320VC5402组成的数据采集系统对同一个实验对象的语音信号“您好”和“啊”的采集结果,图5和图7分别为WINDOWS 98附件中的录音机所录下的语音信号“您好”和“啊”用MATLAB仿真后的图形结果。下面图8为AD50采样信号“啊”音的FFT Magnitude, 图9为WINDOWS 98附件中的录音机录制信号“啊”音的FFT Magnitude。
5 结束语本文以TMS320VC5402与TLC320AD50C为例,详细介绍了AD50与DSP串口通信的硬件接口及软件实现。从实验结果我们可以发现TLC320AD50C可以对语音信号进行无失真采样,完全能满足后续语音信号处理的要求,并且与DSP接口简单,高性能,低功耗,已成为当前语音处理的主流产品。广泛适用于音频处理,语音增强,语音安全,回声抵消,VoIP等电话或语音应用中。
东南大学港口规划布置课程设计
《港口规划与布置》课程设计计算说明书 交通学院港航系 二○一三年八月
目录 1设计基础资料 (3) 2 1.1 港口状况及发展规 划 (3) 3 1.2 设计船 型 (3) 4 1.3 装卸工艺及装卸能 力 (3) 5 1.4 港处自然条 件 (3) 6 1.5 施工能
力 (3) 7 1.6 主要投资项目单 价 (4) 8 1.7 其他经济参数假 设 (4) 9港口规模 (5) 9.1件杂货码头最优泊位 数······························ ······························· (6) 9.2散货码头最优泊位 数······························ ·······························
(6) 9.3泊位年通过能力验 算······························ ······························· (6) 10港口总体布置 (8) 10.1港口水域布 置······························ ······························· (8) 10.1.1码头布 置···························· ····························· (8) 10.1.1.1码头顶高 程·························· ··························· (8) 10.1.1.2码头前沿水深(底高
DSP实验报告
一、综合实验内容和目的 1、实验目的 (1) 通过实验学习掌握TMS320F28335的浮点处理; (2) 学习并掌握A/D模块的使用方法; (3) 学习并掌握中断方式和查询方式的相关知识及其相互之间的转换; (4) 学习信号时域分析的方法,了解相关电量参数的计算方法; (5) 了解数字滤波的一些基本方法。 2、实验内容 要求1:对给定的波形信号,采用TMS320F28335的浮点功能计算该信号的以下时域参数:信号的周期T,信号的均方根大小V rms、平均值V avg、峰-峰值V pp。 其中,均方根V rms的计算公式如下: V= rms 式中N为采样点数,()u i为采样序列中的第i个采样点。 要求2:所设计软件需要计算采样的波形周期个数,并控制采样点数大于1个波形周期,且小于3个波形周期大小。 要求3:对采集的数据需要加一定的数字滤波。 二、硬件电路 相关硬件:TMS320F28335DSP实验箱,仿真器。
硬件结构图 三、程序流程图 1、主程序流程图 程序的主流程图2、子程序流程图
参数计算的流程图 四、实验结果和分析 1、实验过程分析 (1) 使用的函数原型声明 对ADC模件相关参数进行定义:ADC时钟预定标,使外设时钟HSPCLK 为25MHz,ADC模块时钟为12.5MHz,采样保持周期为16个ADC时钟。 (2) 定义全局变量 根据程序需要,定义相关变量。主要有:ConversionCount、Voltage[1024]、Voltage1[1024]、Voltage2[1024]、filter_buf[N]、filter_i、Max、Min、T、temp、temp1、temp2、temp3、Num、V、Vav、Vpp、Vrm、fre。这些变量的声明请见报告后所附的源程序。 (3) 编写主函数 完成系统寄存器及GPIO初始化;清除所有中断,初始化PIE向量表,将程
东南大学机械设计考试平面连杆机构1
平面连杆机构1 一、单项选择题 1、具有急回特性的四杆机构,其行程速度变化系数K的值(C )。 A. 1 = > D. 1 ≤ B. 1 < C. 1 2、在曲柄摇杆机构中,当摇杆为从动件时,最小传动角出现在(B)共线的位置。 A. 曲柄与连杆 B. 曲柄与机架 C. 摇杆与机架 D. 摇杆与连杆 3、铰链四杆机构有整转副的条件是:最短杆与最长杆长度之和(C)其余两杆长度之和。 A. < B. = C. ≤ D. ≥ 4、四杆机构的急回特性是针对主动件作(A)而言的。 A. 等速转动 B. 等速移动 C. 变速转动 D. 变速移动 5、对心曲柄滑块机构以滑块为从动件时,其最小传动角γ min出现在曲柄(A)的位置。 A. 垂直于滑块导路 B. 垂直于连杆 C. 与连杆共线 D. 与机架共线 6、如果铰链四杆机构中的最短杆与最长杆长度之和(A)其余两杆长度之和,则该 机构中不存在整转副。 A. > B. ≥ C. < D. ≤ 7、四杆机构的急回特性是针对从动件作(D)而言的。 A. 等速转动 B. 等速移动 C. 变速转动 D.往复运动 8、对心曲柄滑块机构以滑块为从动件时,其最大传动角γ max为(C)。 A. ? 90 D. ? <90 45 C. ? 30 B. ? 9、对于双摇杆机构,最短构件与最长构件长度之和(B)大于其它两构件长度之和。 A. 一定 B. 不一定 C. 一定不 D. 在最短构件为机架 10、对于曲柄滑块机构,当曲柄作等速转动时,从动件滑块(B)具有急回特性。 A. 一定 B. 不一定 C. 一定不 D. 在极限位置 11、当连杆机构位置一定时,取不同构件为原动件,机构压力角的数值(B)。 A. 相同 B. 不同 C. 与原动件转向有关 D. 与原动件转速大小有关 12、铰链四杆机构中若最短杆与最长杆长度之和大于其他两杆长度之和,则机构中(C)。 A. 一定有曲柄存在 B. 是否有曲柄存在取决于机架是否为最短构件 C. 一定无曲柄存在 D. 是否有曲柄存在取决于机架是否为最长构件 二、填空题 1、平面连杆机构是若干构件用低副连接组成的平面机构。 α时,该机构处于死点位置。 2、当四杆机构的压力角? =90
常见串口接口电路设计集锦
常见串口接口电路设计集锦 六种常用串口接口电路1、并口接口(分立元件) 适用于Windows 95/98/Me 操作系统。这个电路与FMS 随软件提供的电路比多了一个200K 的电阻,这个主要是为了与JR 的摇控器连接,因为JR 的摇控器教练口好象是集电极开路设计的,需要加一只上拉电阻才能正常工作。 不过电路还是满简单的,用的元件也很少,很适合无线电水平不太高的朋友们 制作,只是不能用于Win2000/XP 上有点让人遗憾。 2、串口接口(分立元件)字串5 适用于Windows 95/98/Me 操作系统,电路也不是很复杂,当然元件比并口电路多了一些,而且串口的外壳比并口小很多,如何把这些元件都放到小 小的外壳里免不了要大家好好考虑一下了。当做体积小也是它的最大的优点, 而且不用占用电脑并口,因为现在还有一些打印机还是要用并口的。缺点同样 是不支持Win2000/XP。 3、串行PIC 接口(使用PIC12C508 单片机)字串9 适用于Windows 95/98/Me/2000/XP 操作系统。电路简单,只是用到MicroChip 公司的PIC12C508 型单片机,免不了要用到编程器向芯片里写程序了,这个东西一般朋友可能没有,不过大多卖单片机的地方都有编程器,你只 要拿张软盘把需要用的HEX 文件拷去让老板帮你写就可以了。这个接口最大 的优点就是支Win2000/XP 操作系统,还可以用PPJOY 这个软件来用摇控器虚拟游戏控制器玩电脑游戏。 4、25 针串行PIC 接口(使用PIC12C508 单片机) 适用于Windows 95/98/Me/2000/XP 操作系统。电路同9 针的接口基本一样,只不过是接25 针串口的,现在用的不是很多了。
串行通信技术-模拟信号转换接口
微机原理与应用实验报告6 实验9 串行通信技术 实验10A 模拟信号转换接口 实验报告
实验九串行通信技术 一、实验目的 1. 了解异步串行通信原理; 2. 掌握MSP430异步串行通信模块及其编程方法; 二、实验任务 1. 了解MSP430G2553实验板USB转串口的通信功能,掌握串口助手的使用 (1)利用PC机的串口助手程序控制串口,实现串口的自发自收功能 为实现PC串口的自发自收功能,须现将实验板上的扩展板去下,并将单片机板上的BRXD和BTXD用杜邦线进行短接,连接图如下所示: 由此可以实现PC串口的自收自发功能。 (2)思考题:异步串行通信接口的收/发双方是怎么建立起通信的 首先在异步通信中,要求接收方和发送方具有相同的通信参数,即起始位、停止位、波特率等等。在满足上面条件的情况下,发送方对于每一帧数据按照起始位数据位停止位的顺序进行发送,而接收方则一直处于接受状态,当检测到起始位低电平时,看是采集接下来发送方发送过来的数据,这样一帧数据(即一个字符)传送完毕,然后进行下一帧数据的接受。这样两者之间就建立起了通信。 2. 查询方式控制单片机通过板载USB转串口与PC机实现串行通信 (1)硬件连接图
(2)C语言程序 采用SMCLK=1.0MHz时,程序如下:
其中SMCLK=1MHz,波特率采用的是9600,采用低频波特方式,则N=1000000/9600=104.1666…,故UCA0BR1=0,UCA0BR0=104,UCBRS=1; 当采用外部晶振时,时钟采用默认设置即可,程序如下:
也是采用了低频波特率方式,所以关于波特率设置的相关计算和上面是一样的。 (3)思考:如果在两个单片机之间进行串行通信,应该如何设计连线和编程? 由于在上面的连线中将单片机上的P1.2和BRXD相连,P1.1和BTXD相连,所以若要在两个单片机之间进行通信,首先应该将两个单片机的P1.2和P1.1交叉相连,并根据上面的程序进行相同的关于端口和波特率相关的设置即可实现两个单片机之间的通信。 3. (提高)利用PC机RS232通信接口与单片机之间完成串行通信 (1)硬件连接图 在实验时,采用了将PC机的串口com1直接连接至MSP430F149的孔型D9连接器上,G2553单片机的输出引脚P1.1和P1.2分别与F149单片机上的URXD1和UTXD1相连接,连接图如下所示:
DSP实验报告
东南大学自动化学院 实验报告 课程名称: DSP技术及课程设计 实验名称:直流无刷电机控制综合实验 院(系):自动化专业:自动化 姓名:ssb 学号:08011 实验室:304 实验组别: 同组人员:ssb1 ssb2 实验时间:2014年 6 月 5 日评定成绩:审阅教师:
目录 1.实验目的和要求 (3) 1.1 实验目的 (3) 1.2 实验要求 (3) 1.2.1 基本功能 (3) 1.2.2 提高功能 (3) 2.实验设备与器材配置 (3) 3.实验原理 (3) 3.1 直流无刷电动机 (3) 3.2 电机驱动与控制 (5) 3.3 中断模块 (7) 3.3.1 通用定时器介绍及其控制方法 (7) 3.3.2 中断响应过程 (7) 3.4 AD模块 (8) 3.4.1 TMS320F28335A 芯片自带模数转换模块特性 (8) 3.4.2 模数模块介绍 (8) 3.4.3 模数转换的程序控制 (8) 4.实验方案与实验步骤 (8) 4.1 准备实验1:霍尔传感器捕获 (8) 4.1.1 实验目的 (8) 4.1.2 实验内容 (9) 4.1.2.1 准备 (9) 4.1.2.2 霍尔传感器捕获 (9) 4.2 准备实验2:直流无刷电机(BLDC)控制 (10) 4.2.1 程序框架原理 (10) 4.2.1.1 理解程序框架 (10) 4.2.1.2 基于drvlib281x库的PWM波形产生 (11) 4.2.2 根据捕获状态驱动电机运转 (12) 4.2.2.1 目的 (12) 4.2.2.2 分析 (12) 4.3 考核实验:直流无刷电机调速控制系统 (13) 4.3.1 初始化工作 (13) 4.3.2 初始化定时器0.... . (13) 4.3.3初始化IO口 (13) 4.3.4中断模块.... (13) 4.3.5 AD模块 (14) 4.3.6在液晶屏显示 (15) 4.3.7电机控制 (17) 4.3.7.1 控制速度方式选择 (17) 4.3.7.2 控制速度和转向 (18) 4.3.8延时子函数 (19) 4.3.9闭环PID调速 (19)
揭秘DSP电机控制串行通信系统电路设计
揭秘DSP电机控制串行通信系统电路设计 在电机控制系统中,客户端要通过上位机来设置电机的运行参数,而 被控电机也要将各种运行状态信息实时地传给远程控制端客户,串行通信由于 连线少,成本低,简单可靠,被广泛应用。本文利用SCI 串行通讯接口实现DSP 控制器与PC 机的通信连接;电机控制系统中还必须有数码显示驱动电路,以便于现场控制人员及时了解电机当前的转速等信息,因此利用SPI 同步串行口来实现DSP 与外围设备之间的通信就很有必要。分析了数字信号处理芯片TMS320LF2407ADSP 的串行外设接口SPI,及串行通信接口SCI 模块。在电机控制实验系统中,给出了由这2 个模块构成的串行通信应用实例。重点讲述了 相关的串行通信接口电路硬件设计高。 串行通信接口模块的硬件电路设计 电机的运行参数,如转向、转速及位置信号等由主机制定,通过RS232 串行通信传输到DSP,DSP 再将运行结果返回给主机的电机控制系统中,以实现远程客户端和被控电机之间的通讯。由于上位机(PC)一般都带有RS232 接口,所以我们利用上位机的串行口与下位机DSP 的异步串行口SCI 来进行RS232C 通信和数据交换,实现计算机对工业现场被控对象的检测和控制。TMS32OLF24O7A 的串行通信接口电路如该实验系统利用DSP 的SCI 串行通信接口电路实现了DSP 控制器与上位机的通讯连接,整个接口电路简单,可靠性高。DSP 控制器通过SCI 串行通信接口电路,将控制系统的实时运行状态上传给上位机供存储和分析,而上位机则通过SCI 串行通信接口电路将控制指令(例如起、停、正转、反转、运行速度等)发送给DSP 控制器,以实现对电机控制系统的实时控制。本试验系统的串行通信速率可变,波特率默认值为l 9200,从l200,2400,4800,9 600,到l9 200 可调。
东南大学电路实验实验报告
电路实验 实验报告 第二次实验 实验名称:弱电实验 院系:信息科学与工程学院专业:信息工程姓名:学号: 实验时间:年月日
实验一:PocketLab的使用、电子元器件特性测试和基尔霍夫定理 一、仿真实验 1.电容伏安特性 实验电路: 图1-1 电容伏安特性实验电路 波形图:
图1-2 电容电压电流波形图 思考题: 请根据测试波形,读取电容上电压,电流摆幅,验证电容的伏安特性表达式。 解:()()mV wt wt U C cos 164cos 164-=+=π, ()mV wt wt U R sin 10002cos 1000=??? ? ? -=π,us T 500=; ()mA wt R U I I R R C sin 213.0== =∴,ππ40002==T w ; 而()mA wt dt du C C sin 206.0= dt du C I C C ≈?且误差较小,即可验证电容的伏安特性表达式。 2.电感伏安特性 实验电路: 图1-3 电感伏安特性实验电路 波形图:
图1-4 电感电压电流波形图 思考题: 1.比较图1-2和1-4,理解电感、电容上电压电流之间的相位关系。对于电感而言,电压相位 超前 (超前or 滞后)电流相位;对于电容而言,电压相位 滞后 (超前or 滞后)电流相位。 2.请根据测试波形,读取电感上电压、电流摆幅,验证电感的伏安特性表达式。 解:()mV wt U L cos 8.2=, ()mV wt wt U R sin 10002cos 1000=?? ? ?? -=π,us T 500=; ()mA wt R U I I R R L sin 213.0===∴,ππ 40002==T w ; 而()mV wt dt di L L cos 7.2= dt di L U L L ≈?且误差较小,即可验证电感的伏安特性表达式。 二、硬件实验 1.恒压源特性验证 表1-1 不同电阻负载时电压源输出电压 2.电容的伏安特性测量
DSP实验报告
实验0 实验设备安装才CCS调试环境 实验目的: 按照实验讲义操作步骤,打开CCS软件,熟悉软件工作环境,了解整个工作环境内容,有助于提高以后实验的操作性和正确性。 实验步骤: 以演示实验一为例: 1.使用配送的并口电缆线连接好计算机并口与实验箱并口,打开实验箱电源; 2.启动CCS,点击主菜单“Project->Open”在目录“C5000QuickStart\sinewave\”下打开工程文件sinewave.pjt,然后点击主菜单“Project->Build”编译,然后点击主菜单“File->Load Program”装载debug目录下的程序sinewave.out; 3.打开源文件exer3.asm,在注释行“set breakpoint in CCS !!!”语句的NOP处单击右键弹出菜单,选择“Toggle breakpoint”加入红色的断点,如下图所示; 4.点击主菜单“View->Graph->Time/Frequency…”,屏幕会出现图形窗口设置对话框 5.双击Start Address,将其改为y0;双击Acquisition Buffer Size,将其改为1; DSP Data Type设置成16-bit signed integer,如下图所示; 6.点击主菜单“Windows->Tile Horizontally”,排列好窗口,便于观察 7.点击主菜单“Debug->Animate”或按F12键动画运行程序,即可观察到实验结果: 心得体会: 通过对演示实验的练习,让自己更进一步对CCS软件的运行环境、编译过程、装载过程、属性设置、动画演示、实验结果的观察有一个醒目的了解和熟悉的操作方法。熟悉了DSP实验箱基本模块。让我对DSP课程产生了浓厚的学习兴趣,课程学习和实验操作结合为一体的学习体系,使我更好的领悟到DSP课程的实用性和趣味性。
东南大学2017级机械工程本科专业培养方案
东南大学2017级机械工程本科专业培养方案 门类:工学专业代码:080201 授予学位:工学学士 学制:四年制定日期:2017年6月 一. 培养目标 本专业培养学生掌握机械工程的基本理论、基本知识、基本能力以及机械学科的专门知识与技能;基础扎实、知识面广、工程实践能力强,具有宽阔的专业技术知识,具有较强的发展潜力和创造性发展的个性,能在机械工程领域从事现代设计、制造、管理、教学科研等方面工作、能够跟踪本领域新理论新技术、具有创新精神和国际化视野的复合型高级工程技术人才。 本专业的培养目标由4部分组成: (1)能够运用工程技术原则及专业知识设计、制造机械系统; (2)在团队工作和交流中担任骨干或领导角色,并发挥有效作用; (3)在与机械工程相关专业领域里具有就业竞争力,能够通过继续教育或其他终身学习渠道增加知识和提升能力; (4)具有良好的职业道德,有意愿并有能力服务社会; 二. 毕业生应具有的知识、能力、素质 本专业毕业生必须掌握的知识、能力与素质为: (1)工程知识:能够将数学、自然科学、机械工程基础和专业知识用于解决复杂工程问题; (2)问题分析:能够应用数学、自然科学和工程科学的基本原理,识别、表达、并通过文献研究分析复杂工程问题,以获得有效结论; (3)设计/开发解决方案:能够设计针对复杂机械工程问题的解决方案,设计满足特定需求的机械系统、单元(部件)或工艺流程,并能够在设计环节中体现创新意识,考虑社会、健康、安全、法律、文化以及环境等因素; (4)研究:能够基于科学原理并采用科学方法对复杂机械工程问题进行研究,包括设计实验、分析与解释数据、并通过信息综合得到合理有效的结论; (5)使用现代工具:能够针对复杂机械工程问题,开发、选择与使用恰当的技术、资源、现代工程工具和信息技术工具,包括对复杂工程问题的预测与模拟,并能够理解其局限性; (6)工程与社会:能够基于工程相关背景知识进行合理分析,评价专业工程实践和复杂工程问题解决方案对社会、健康、安全、法律以及文化的影响,并理解应承担的责任; (7)环境和可持续发展:能够理解和评价针对复杂工程问题的工程实践对环境、社会可持续发展的影响; (8)职业规范:具有人文社会科学素养、社会责任感,能够在工程实践中理解并遵守工程职业道德和规范,履行责任; (9)个人和团队:能够在多学科背景下的团队中承担个体、团队成员以及负责人的角色; (10)沟通:能够就复杂工程问题与业界同行及社会公众进行有效沟通和交流,包括撰写报告和设计文稿、陈述发言、清晰表达或回应指令。并具备一定的国际视野,能够在跨文化背景下进行沟通和交流; (11)项目管理:理解并掌握工程管理原理与经济决策方法,并能在多学科环境中应用; (12)终身学习:具有自主学习和终身学习的意识,有不断学习和适应发展的能力。 三. 主干学科与相近专业 主干学科:机械工程、力学。相近专业:机械设计制造及其自动化、车辆工程、机械电子工程、工业设计。 四. 主要课程
串行通信技术SERDES正成为高速接口的主流
串行通信技术SERDES正成为高速接口的主流 串行通信技术SERDES正成为高速接口的主流 2009-08-21 13:44随着对信息流量需求的不断增长,传统并行接口技术成为进一步提高数据传输速率的瓶颈。过去主要用于光纤通信的串行通信技术——SERDES正在取代传统并行总线而成为高速接口技术的主流。本文阐述了介绍SERDES 收发机的组成和设计,并展望了这种高速串行通信技术的广阔应用前景。 ? SERDES是英文SERializer(串行器)/DESerializer(解串器)的简称。它是一种时分多路复用(TDM)、点对点的通信技术,即在发送端多路低速并行信号被转换成高速串行信号,经过传输媒体(光缆或铜线),最后在接收端高速串行信号重新转换成低速并行信号。这种点对点的串行通信技术充分利用传输媒体的信道容量,减少所需的传输信道和器件引脚数目,从而大大降低通信成本。 ? SERDES技术最早应用于广域网(WAN)通信。国际上存在两种广域网标准:一种是SONET,主要通行于北美;另一种是SDH,主要通行于欧洲。这两种广域网标准制订了不同层次的传输速率。目前万兆(OC-192)广域网已在欧美开始实行,
中国大陆已升级到2.5千兆(OC-48)水平。SERDES技术支持的广域网构成了国际互联网络的骨干网。 ? SERDES技术同样应用于局域网(LAN)通信。因为SERDES 技术主要用来实现ISO模型的物理层,SERDES通常被称之为物理层(PHY)器件。以太网是世界上最流行的局域网,其数据传输速率不断演变。IEEE在2002年通过的万兆以太网标准,把局域网传输速率提高到了广域网的水平,并特意制订了提供局域网和广域网无缝联接的串行WAN PHY。与此同时,SERDES技术也广泛应用于不断升级的存储区域网(SAN),例如光纤信道。 ? 随着半导体技术的迅速发展,计算机的性能和应用取得了长足进步。可是,传统并行总线技术——PCI却跟不上处理器和存储器的进步而成为提高数据传输速率的瓶颈。新一代PCI标准PCI Express正是为解决计算机IO瓶颈而提出的(见表1)。PCI Express是一种基于SERDES的串行双向通信技术,数据传输速率为2.5G/通道,可多达32通道,支持芯片与芯片和背板与背板之间的通信。国际互联网络和信息技术的兴起促成了计算机和通信技术的交汇,而SERDES串行通信技术逐步取代传统并行总线正是这一交汇的具体体现。
dsp实验报告
DSP 实验课大作业实验报告 题目:在DSP 上实现线性调频信号的脉冲压缩,动目标显示和动目标检测 (一)实验目的: (1)了解线性调频信号的脉冲压缩、动目标显示和动目标检测的原理,及其DSP 实现的整个流程; (2)掌握C 语言与汇编语言混合编程的基本方法。 (3)使用MATLAB 进行性能仿真,并将DSP 的处理结果与MATLAB 的仿真结果进行比较。 (二)实验内容: 1. MATLAB 仿真 设定信号带宽为B= 62*10,脉宽-6=42.0*10τ,采样频率为62*10Fs =,脉冲重复周期为-4T=2.4*10,用MATLAB 产生16个脉冲的线性调频信号,每个脉冲包含三个目标,速度和距离如下表: 对回波信号进行脉冲压缩,MTI ,MTD 。并且将回波数据和频域脉压系数保存供DSP 使用。 2.DSP 实现 在Visual Dsp 中,经MATLAB 保存的回波数据和脉压系数进行脉压,MTI 和MTD 。 (三)实验原理 1.脉冲压缩原理 在雷达系统中,人们一直希望提高雷达的距离分辨力,而距离分辨力定义为:22c c R B τ?==。其中,τ表示脉冲时宽,B 表示脉冲带宽。从上式中我们可以看
出高的雷达分辨率要求时宽τ小,而要求带宽B大。但是时宽τ越小雷达的平均发射功率就会很小,这样就大大降低了雷达的作用距离。因此雷达作用距离和雷达分辨力这两个重要的指标变得矛盾起来。然而通过脉冲压缩技术就可以解决这个矛盾。脉冲压缩技术能够保持雷达拥有较高平均发射功率的同时获得良好的距离分辨力。 在本实验中,雷达发射波形采用线性调频脉冲信号(LFM),其中频率与时延成正比关系,因此我们就可以将信号通过一个滤波器,该滤波器满足频率与时延成反比关系。那么输入信号的低频分量就会得到一个较大的时延,而输入信号的高频分量就会得到一个较小的时延,中频分量就会按比例获得相应的时延,信号就被压缩成脉冲宽度为1/B的窄脉冲。 从以上原理我们可以看出,通过使用一个与输入信号时延频率特性规律相反的滤波器我们可以实现脉冲压缩,即该滤波器的相频特性与发射信号时共轭匹配的。所以说脉冲压缩滤波器就是一个匹配滤波器。从而我们可以在时域和频域两个方向进行脉冲压缩。 滤波器的输出() h n= y n为输入信号() x n与匹配滤波器的系统函数() *(1) y n x n s N n =--。转换到频域就是--卷积的结果:* ()()*(1) s N n =。因此我们可以将输入信号和系统函数分别转化到频域:Y k X k H k ()()( Y k,然后将结果再转化到时域, h n H k →,进行频域相乘得() ()() x t X k →,()() 就可以得到滤波器输出:()() →。我们可用FFT和IFFT来实现作用域的 Y k y n 转换。原理图如下: 图1.脉冲压缩原理框图 2.MTI原理 动目标显示(MTI)技术是用来抑制各种杂波,来实现检测或者显示运动目标的技术。利用它可以抑制固定目标的信号,显示运动目标的信号。以线性调频
课程设计说明书
东南大学成贤学院 课程设计报告 题目Y4232C剃齿机右顶针架体的机械加 工工艺规程及重要工序专用夹具设计 课程名称机械制造工程学 专业机械汽车工程 班级 XXXXXXXX 学生姓名 XXXX 学号 XXXXXXXXX 设计地点 XXXXXXX 指导教师 XXXXXX 设计起止时间:2012年5月21日至2012年6月8日
目录 序言……………………………………………………… 一. 零件的分析………………………………………… 1.零件的作用……………………………………………… 2.零件的工艺分析…………………………………………二.工艺规程的设计…………………………………… 1. 确定毛坯的制造形式…………………………………… 2. 基准的选择……………………………………………… 3. 制定工艺路线…………………………………………… 4. 机械加工余量,工序尺寸及毛坯尺寸的确定………… 5. 确定切削用量…………………………………………… 三.专用夹具设计………………………………………… 1.设计宗旨…………………………………………………… 2. 零部件的选用…………………………………………… 3.对机床专用夹具的基本要求……………………………… 四.课程设计心得体会……………………………………五.参考文献……………………………………………… 序言
本次课程设计是在我们学完了大学的全部基础课,技术基础课以及大部分专业课之后进行的。这是我们在进行毕业设计之前对所学各课程的一次深入的综合性的链接,也是一次理论联系实际的训练。因此,它在我们的大学生活中占有十分重要的地位。它能让我们在毕业之前得到综合性的训练,增强我们独立思考问题和解决问题的能力。 我想我能在下面几方面得到锻炼: (1)熟练的运用机械制造基础、机械制造技术和其他有关先修课程中的基本理论,以及在生产实习中所学到的实践知识,正确地解决一个零件在加工中的定位,夹紧以及工艺路线安排,工艺尺寸确定等问题,保证零件的加工质量。 (2)通过设计夹具的训练,获得根据被加工零件的加工要求,设计出高效,省力,经济合理而能保证加工质量的夹具的能力。 (3)学会使用手册以及图表资料。掌握与本设计有关的各种资料的名称及出处,能够做到熟练的运用 就我个人而言,我希望通过这次课程设计对自己未来将从事的工作进行一次适应性训练,从中锻炼自己。 一、零件的分析
DSP运行实验报告
DSP运行实验报告 一、实验目的 熟悉CCS软件仿真下,DSP程序的下载和运行;熟悉借助单片机的DSP程序下载和运行; 熟悉借助仿真器的DSP程序下载和运行;熟悉与DSP程序下载运行相关的CCS编程环境。 二、实验原理 CCS软件仿真下,借用计算机的资源仿真DSP的内部结构,可以模拟DSP程序的下载和运行。 如果要让程序在实验板的DSP中运行、调试和仿真,可以用仿真器进行DSP程序下载和运行。初学者也可以不用仿真器来使用这款实验板,只是不能进行程序调试和仿真。 在本实验板的作用中,单片机既是串口下载程序的载体,又是充当DSP 的片外存储器(相对于FLASH),用于固化程序。 三、实验设备、仪器及材料 安装有WINDOWS XP操作系统和CCS3.3的计算机。 四、实验步骤(按照实际操作过程) 1、CCS软件仿真下,DSP程序的下载和运行。 第一步:安装CCS,如果不使用仿真器,CCS 的运行环境要设置成一个模拟仿真器(软仿真)。
第二步:运行CCS,进入CCS 开发环境。 第三步:打开一个工程。 将实验目录下的EXP01目录拷到D:\shiyan下(目录路径不能有中文),用[Project]\[Open]菜单打开工程,在“Project Open”对话框中选 EXP01\CPUtimer\CpuTimer.pjt,选“打开”, 第四步:编译工程。 在[Project]菜单中选“Rebuild All”,生成CpuTimer.out文件。 第五步:装载程序。 用[File]\[Load Program]菜单装载第四步生成CpuTimer.out文件,在当前工程目录中的Debug 文件夹中找到CpuTimer.out文件,选中,鼠标左键单击“打开”。
机械制造工艺设计杠杆(一)
机械制造课程设计 说明书 题目杠杆夹具设计 专业班级机械工程及自动化08级3班学号02008326 学生姓名唐琪 指导教师_张灶法 东南大学 2011年9月
目录 1.课程设计任务书...................................................................错误!未定义书签。 2.设计毛坯 (4) 2.机械加工工艺过程卡片 (5) 3.机械加工工序卡片 (7) 4.装配总图设计 (8) 5.大件零件图设计 (11) 6.设计小结 (13) 7.参考文献 (14)
1.课程设计任务书 东南大学机械工程学院 机械制造工程原理课程设计任务书 一、设计题目 设计_____杠杆_____ 零件的机械加工工艺规程及相关工序的专用夹具。 二、原始依据 1.生产类型:成批生产; 2.零件图样。 三、设计内容 1.零件图1张(选做); 2.毛坯草图1张; 3.制定零件的机械加工工艺规程,填写机械加工工艺过程卡片及指定工序的机械加工工序卡片各1份。或填入机械加工工艺过 程综合卡片; 4.设计指定的专用夹具,绘制夹具装配总图1张,绘制所设计夹具的大件零件图1张;
5.编写设计说明书1份。 四、起讫时间 2012年12月20日至2013年1月18日 五、进度安排 课程时间进度安排如表1所示,供参考。 表1 课程设计时间进度安排 学生姓名陈文 班级学号2010180230 指导教师尹克俭
2013 年 1 月18 日 1.1图纸: 表1 杠杆技术零件图 加工表面尺寸及偏差 mm 公差精度 等级 表面粗糙度Ra um 形位公差 mm 左侧面AB34 3.2 圆端面C,D 40 3.2 右侧上面E,F 28 6.3
基于单片机的串行通信接口的设计开题报告
专科毕业设计/论文 开题报告课题名称基于单片机的串行通信接口的设计 系别机电与自动化学院 专业班机电一体化技术1002班 姓名柯辉 评分 导师(签名) 华中科技大学武昌分校 20年月日
毕业设计(论文)开题报告撰写要求: 1.开题报告的主要内容 1)所选课题国内、外研究及发展状况 2)课题研究的目的和意义; 3)课题研究的主要内容、难点及关键技术; 4)研究方法及技术途径; 5)实施计划。 2.主要参考文献:不少于3篇。 3.开题报告的字数不少于1500字,格式按《华中科技大学武昌分校专科毕业设计(论文)撰写规范》的要求撰写。 4.开题报告单独装订,本附件为封
华中科技大学武昌分校专科学生毕业设计开题报告学生姓名柯辉学号20102821076专业班级机电一体化1002系别机电与自动化指导教师吴蕾职称工程师课题名称基于单片机的串行通信接口的设计 1课题国内、外研究及发展状况 1.1课题在国内研究发展状况 随着城市的不段发展和工业科技的不断进步,电子工业产品也越来越自动化和小型化,人们对信息流量的需求也在不断增长,传统并行通信接口技术成为进一步提高数据传输速率的瓶颈。过去主要用于光纤通信的串行通信接口技术与并行接口技术相比其设计简单、控制方便不仅简化了系统的连线,缩小了电路板的面积,节省了系统资源而且还具有扩展性好、编程方便,易于实现用户系统软硬件的模块化以及标准化,串行接口少,便于远距离传输等优点所以串行通信接口技术正在取代传统并行通信接口技术而成为高速接口技术的主流。而在串行通信接口技术中又以RS232和RS485两种串口应用的最为广泛。在国内一些高端知名的电子产品公司如联想、华为、海信等连年不断的对电脑、手机进行升级处理这些都离不开接口技术的快速发展,而人们对这类高端产品的依赖也促进了电子科技的进一步发展而串行通信接口技术正是电子科技的重中之重。有需求就有市场科技永远是人们生活中的一大主流,这就为串行通信接口的发展铺上了一条光明大道。 1.2课题在国外的研究发展状况 串行通信接口技术的发展越来越迅速蓬勃不仅仅表现在国内在国外发展同样迅猛由于国外政府对于IT行业的重视和照顾纷纷采取了一系列相关政策来促进串行通信技术发展使的串口技术成为了进入宽带化、网格化而且还具有了移动性、泛在性的可信网。例如美国的EIA、微软等协会、公司对串口技术的重视不断对串口技术进行升级改良。iphone、三星等国外智能手机的不断升级改良也离不开串行通信接口技术的进一步发展,所以人们想要生活的更好电子技术的研究是必不可少的而其中的串行通信技术也是重中之重。
东南大学MCU综合课程设计
东南大学自动化学院 《MCU技术及课程设计》 数字钟设计报告 姓名:学号: 专业:自动化实验室: 组别:同组人员: 设计时间:2015年6月1日——2015年6月17日 评定成绩:审阅教师:
目录 一. 课程设计的目的与要求 (3) 二. 原理设计 (3) 三. 方案实现与测试,实验流程图,可采用c语言实现 (8) 四.分析与总结 (9)
一.课程设计的目的与要求 1.可设定时间初始值; 2.能够使用按键调整时间的时分位; 3.使用段式LCD显示。 二.原理设计 MSP430的液晶显示有静态、2MUX、3MUX、4MUX四种显示模式,而最常用还是4MUX 模式。通俗讲,就是有四个公共端(相当于数码管扫描显示的位选端)、若干个驱动端的模式。这种模式的最大优点就是能使用最少的引脚提供最多的液晶显示段。图1表示了4MUX显示模式下的公共端与驱动端,其中(a)说明了一个”8”字的四个公共端,(b)说明了两个驱动端,当分别给公共端与驱动端液晶信号时,就显示对应的数码。 图一 在MSP430系列能驱动液晶显示的单片机中,专门开辟了一片存储空间(LCDMEM1~LCDMEM20)存放要显示的信息,被称为液晶显示缓存,简称液晶显存。MSP430F6638共有20字节单元液晶显存,如果使用4MUX方式显示,可以显示160段液晶笔画。这时,每个显存将对应两个驱动端。图2表示了在4MUX方式下的液晶显存、液晶显示、液晶驱动端之间的对应关系。 段式LCD的驱动方法基本上和数码管是不太一样的,数码管只要给电和选通就亮。 但是段式LCD的驱动是靠两部分组成的:
第一部分是不间断的电压脉冲,这个电压脉冲还是被分为好几个电压等级了,如果你用的是1/4duty1/3偏压的话,那么就要有四个电压等级。也就是VCC---2/3VCC--1/3VCC---GND 这几个电压等级直接可以用电阻进行分压得到,然后直接和430单片机的R03---GND; R13----1/3VCC;R23---2/3VCC;R33---VCC这样直接连接就可以了。这样电压等级就有了,具体在里面生成的电压等级脉冲,MSP430是可以自己生成的,不用我们担心了。 COM0--COM3就这些个电压等级的输出管脚。直接连上LCD屏的COM0---COM3就可以了。 第二部分是选通管脚选通管脚也就是LCD上面的SEG1----SEG12,和MSP430F6638的SEG0---SEG11直接相连,硬件电路如下: JP5是用一个跳帽来控制背光(由于板卡IO口有限),把跳帽跳上段式LCD背光打开。 2段式LCD驱动编写步骤: 首先要明白每个输出管脚何时输出和输出什么,这样才能得到我们想要的字形。 MSP430F6638自带有对多达160图块进行对比度控制的集成LCD驱动器,有LCD段码寄存器,就是说你只要把这些你要显示的字形(当然如果你只想显示数字的话,只用存0-9这几个字码就可以了),段码寄存器的地址是从091H开始------到0A4H每个地址里面可以放一个8位,每一位对应于液晶上面的一段,所以说一个地址对应于液晶上面就是一个字。(一个字的段码也是8位的) 这样的话,我们只要将要显示的一个数字的编码发到这个单片机的断码寄存器里面,就可以直接显示了,是通过COM口的脉冲波形同时将寄存器里面的段进行耦合,产生压差,LCD 只有产生压差才能点亮。一直提供一个不变的高电平是要烧坏液晶的,这就是和数码管区别的地方。不过这些脉冲430单片机已经帮我们做好了。 总体的步骤就是,我们将LCD的段码先整理好,然后放在一边备用,等到你想显示某个数据的时候,只要将这个8位的段码直接写入单片机留给你的LCD寄存器写入端口数组就可以了。 在MSP430F6638里面也就是LCDMEM[];[]中应该写的是要显示的位,这个位是数码管上面的位置,比如你想显示液晶上面的第2位数,先不说要显示的内容是什么,这里的位选应该是LCDMEM[1],因为是从0开始的,所以第二位应该是LCDMEM[1].(从091H开始------到0A4H每个地址都可以存一个8段)然后说显示的内容:
东南大学机械课程设计说明书
机械设计课程设计计算说明书 设计题目:带式输送机传动装置设计者:王行洲 学号: 02009227 指导教师:王鸿翔 东南大学 机械工程学院
前言 机械设计课程设计是高等工业学校多数专业第一次全面的机械设计训练,是机械设计课的最后一个重要教育环节,其目的是:(1)培养学生综合运用机械设计及相关课程知识解决机械工程问题的能力,并使所学知识得到巩固和发展; (2)学习机械设计的一般方法和步骤; (3)进行机械设计基本技能的训练,如计算、绘图(其中包括计算机辅助设计)和学习使用设计资料、手册、标准和规范。 此外,机械设计课程设计还为专业课设计和毕业设计奠定了基础。 此书是我在完成此次课程设计之后对整个设计计算过程的整理总结,主要包括整个设计的主要计算及简要说明,对于必要的地方,还有相关简图说明。对于一些需要的地方,还包括一些技术说明,例如在装配和拆卸过程中的注意事项;传动零件和滚动抽成的润滑方式及润滑剂的选择。使我们图纸设计的理论依据。 当然,由于我们是第一次进行机械设计,还有很多考虑不到或不周的地方,有很多零件尺寸材料选择的时候考虑不周全,希望老师在审阅时予以指正。
目录 一、设计任务 (4) 二、选择电动机 (5) 三、计算、分配传动比 (5) 四、运动参数计算 (6) 五、各级传动零件的设计计算 (7) 1选定齿轮材料、热处理及精度 (7) 2高速级斜齿圆柱齿轮设计计算 (7) 3低速级直齿圆柱齿轮设计计算 (14) 六、轴的设计及其校核……………………………………^17 七、轴承校核 (20) 八、键联接的选择和计算 (22) 九、联轴器的选择 (23) 十、箱体及减速器附件说明 (24) 十一、润滑密封设计 (25) 十二、小结 (26) 参考文献 (27)
基于51单片机的双机串行通信课程设计 1000110061
基于AT89C51单片机的双机串行通信设计 姓名:杨应伟 学号:100110061 专业:机械设计制造及其制动化 班级:机电二班
前言 单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域随着计算机技术的发展及工业自动化水平的提高, 在许多场合采用单机控制已不能满足现场要求,因而必须采用多机控制的形式,而多机控制主要通过多个单片机之间的串行通信实现。串行通信作为单片机之间常用的通信方法之一, 由于其通信编程灵活、硬件简洁并遵循统一的标准, 因此其在工业控制领域得到了广泛的应用。 在测控系统和工程应用中,常遇到多项任务需同时执行的情况,因而主从式多机分布式系统成为现代工业广泛应用的模式。单片机功能强、体积小、价格低廉、开发应用方便,尤其具有全双工串行通讯的特点,在工业控制、数据采集、智能仪器仪表、家用电器方面都有广泛的应用。同时,IBM-PC机正好补充单片机人机对话和外围设备薄弱的缺陷。各单片机独立完成数据采集处理和控制任务,同时通过通信接口将数据传给PC机,PC机将这些数据进行处理、显示或打印,把各种控制命令传给单片机,以实现集中管理和最优控制。串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。 在通信过程中,使用通信协议进行通信。在测控系统和工程应用中,常遇到多项任务需同时执行的情况,因而主从式多机分布式系统成为现代工业广泛应用的模式。单片机功能强、体积小、价格低廉、开发应用方便,尤其具有全双工串行通讯的特点,在工业控制、数据采集、智能仪器仪表、家用电器方面都有广泛的应用。同时,IBM-PC机正好补充单片机人机对话和外围设备薄弱的缺陷。各单片机独立完成数据采集处理和控制任务,同时通过通信接口将数据传给PC机,PC机将这些数据进行处理、显示或打印,把各种控制命令传给单片机,以实现集中管理和最优控制。 串行通信是单片机的一个重要应用,本次课程设计就是要利用单片机来完成一个系统,实现爽片单片机床航通信,通信的结果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双击通信。在通信过程中,使用通信协议进行通信。