SSD 590P电机参数设定和自整定
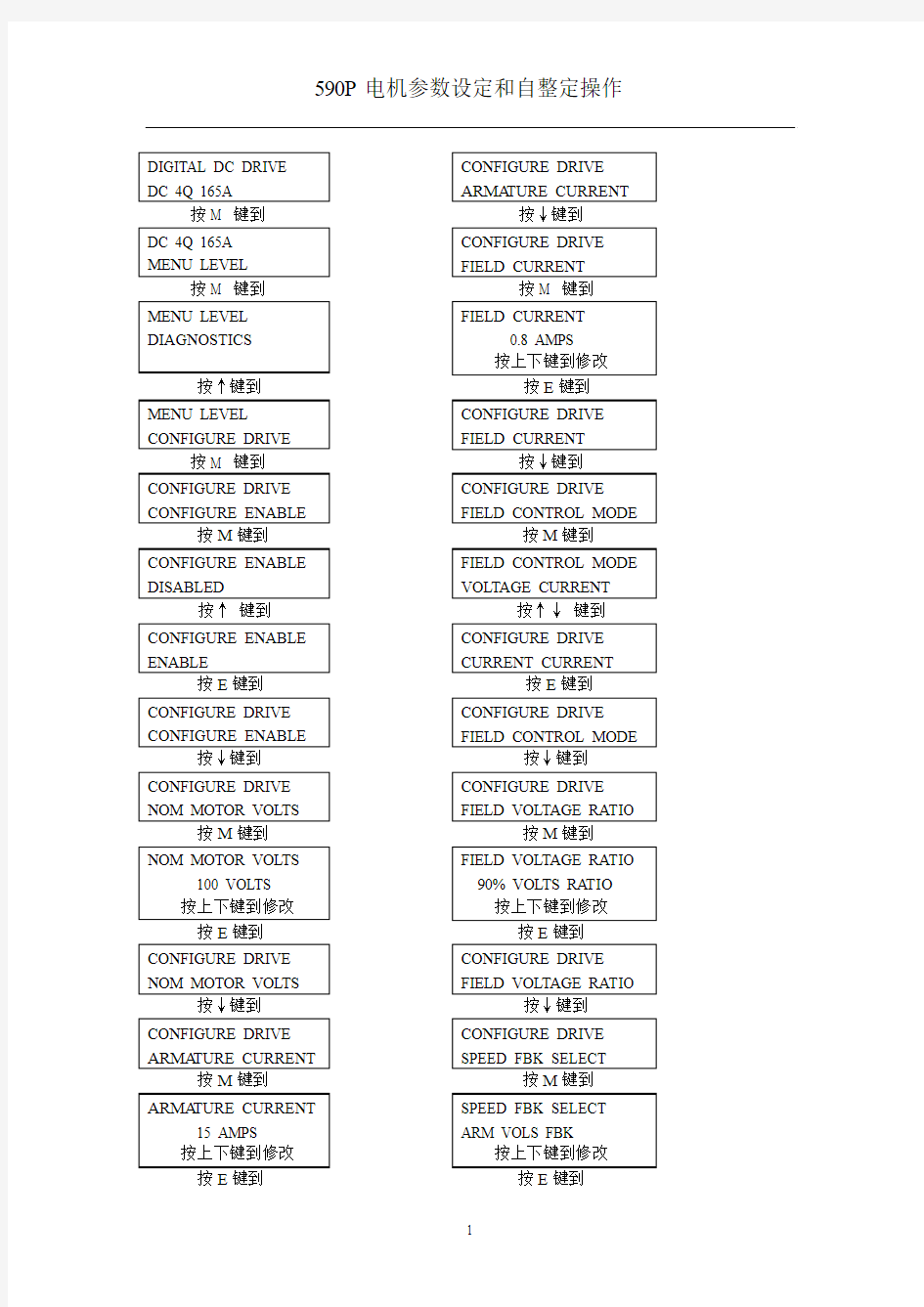

按↑键到 按
E 键到
按M 键到 按M 键到
按E 键到 按E 键到
按E 键到 按E 键到
按↓键到 按↓键到
按M 键到 按M 键到
按M 键到 按↓键找到
按E 键到 按↑键到
等参数保存完毕后 按↓键到 按E 键退出
按↓键找到
调速器自整定完成后调速器 自动停机。 自动变为: 按E 键到
I控制器参数整定经验总结
PID控制器的参数整定 (1)PID是比例,积分,微分的缩写. 比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。 积分调节作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大,则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。 微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,
对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。 (2) PID具体调节方法 ①方法一 确定控制器参数 数字PID控制器控制参数的选择,可按连续-时间PID参数整定方法进行。 在选择数字PID参数之前,首先应该确定控制器结构。对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。一般来说,PI、PID和P控制器应用较多。对于有滞后的对象,往往都加入微分控制。 选择参数 控制器结构确定后,即可开始选择参数。参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。这些要求,对控制系统自身性能来说,有些是矛盾的。我们必须满足主要的方面的要求,兼顾其他方面,适当地折衷处理。 PID控制器的参数整定,可以不依赖于受控对象的数学模型。工程上,PID控制器的参数常常是通过实验来确定,通过试凑,或者通过实验经验公式来确定。 常用的方法,采样周期选择, 实验凑试法 实验凑试法是通过闭环运行或模拟,观察系统的响应曲线,然后根据各参数对系统的影响,反复凑试参数,直至出现满意的响应,从而确定PID控制参数。 整定步骤 实验凑试法的整定步骤为"先比例,再积分,最后微分"。 (1)整定比例控制 将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调小的响应曲线。 (2)整定积分环节 若在比例控制下稳态误差不能满足要求,需加入积分控制。 先将步骤(1)中选择的比例系数减小为原来的50~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑至得到较满意的响应,确定比例和积分的参数。 (3)整定微分环节 若经过步骤(2),PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制,构成PID控制。 先置微分时间TD=0,逐渐加大TD,同时相应地改变比例系数和积分时间,反复试凑至获得满意的控制效果和PID控制参数。 实验经验法 扩充临界比例度法
伺服电机接线方式
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 SIG+ 5 5 SIG+ SIG- 6 4 SIG- BAT+ 3 1 BAT+ BAT- 4 2 BAT- GND 外壳 3 地线 旧版富士驱动器参数设置 新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式) 3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O 接线说明: 1、2、7 24V 36、41 0V × = = =
4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 1 4 2 5 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0、** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机 台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=1、280、000÷分子(N)/分母(M) 台达编码器接线说明: 驱动器接头端马达端 5 1 4 4 14、16 7 13、16 8 屏蔽线 9 台达伺服电机I/O控制说明: 9 使能ON 28 报警 30 停止 37 方向 41 脉冲 35、1 24V 27、4、45、49 0V 5 定位结束 台达驱动器参数设定: P1-00 2(脉冲+方向) P1-44 分子(1280000) P1-45 分母(1000) P2-31 刚性 P2-32 增益调整方向 P2-19 105 P1-54 256(如马达转一圈1000脉冲设为256,表示偏差10个脉冲)
三相异步电动机Matlab仿真
中国石油大学胜利学院综合课程设计总结报告 题目:三相异步电机直接启动特性实验模型 学生姓名:潘伟鹏 系别:机械与电气工程系 专业年级: 2012级电气工程专业专升本2班 指导教师:王铭
2013年 6 月 27日
一、设计任务与要求 普通异步电动机直接起动电流达到额定电流的6--7倍,起动转矩能达到额定转矩的1.25倍以上。过高的温度、过快的加热速度、过大的温度梯度和电磁力,产生了极大的破坏力,缩短了定子线圈和转子铜条的使用寿命。但在电网条件和工艺条件允许的情况下,异步电动机也可以直接启动。本次课程设计通过MATLAB软件建模模拟三相异步电动机直接启动时的各个元器件上的电量变化。 参考: 电力系统matlab仿真类书籍 电机类教材 二、方案设计与论证 三相异步电动机直接起动就是利用开关或接触器将电动机的定子绕组直接接到具有额定电压的电网上。 由《电机学》知三相异步电动机的电磁转矩M与直流电动机的电磁转矩有相似的表达形式。它们都与电机结构(表现为转矩常数)和每级下磁通有关,只不过在三相异步电动机中不再是通过电枢的全部电流,而是点数电流的有功分量。三相异步电机电磁转矩的表达式为: (1-1)式中——转矩常数 ——每级下磁通 ——转子功率因数 式(1-1)表明,转子通入电流后,与气隙磁场相互作用产生电磁力,因此,反映了电机中电流、磁场和作用力之间符合左手定则的物理关系,故称为机械特性的物理表达式。该表达式在分析电磁转矩与磁通、电流之间的关系时非常方便。 从三相异步电动机的转子等值电路可知, (1-2) (1-3)将式(1-2)、(1-3)代入(1-1)得:
伺服电机要调参数
伺服电机要调参数 Prepared on 24 November 2020
松下伺服电机要调哪些参数详细说明 日常生活中,我们所使用的手机、电视机、电脑等,当然也包括机械类产品,使用前都是需要调节好相关参数后,才能更好的方便正常使用,那么松下伺服电机要调哪些参数呢,具体请看下文。 松下伺服电机要调哪些参数具体如下: 一、松下伺服电机基本接线。 【1】主电源输入采用220V,从L1、L3接入(实际使用应参照松下伺服操作手册)。 【2】控制电源输入r或t,也可以直接连接220V。 【3】伺服电机接线方式(见松下伺服操作手册第22至23页),编码器接线(见松下伺服操作手册第24至26页),切勿接错。 二、松下伺服电机试机步骤。 【1】JOG试机功能:仅按基本接线就可试机。 a.在数码显示为初始状态‘r0’的状态下,按‘SET’键。 b.然后连续按‘MODE’键直至数码显示为‘AF-AcL’。 c.然后按上、下键至‘AF-JoG’。 d.按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’。 e.按住‘<’键直至显示‘SrV-on’。 f.按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定,按‘SE T’键结束。 【2】内部速度控制方式。 +(7脚)接+12~24VDC,COM-(41脚)接该直流电源地。 (29脚)接COM-。 c.参数、设置为1(注:此类参数修改后应写入EEPROM,并重新上电)。调节参数,即可使电机转动。参数值即为转速,正值反时针旋转,负值顺时针旋转。 【3】位置控制方式。 +(7脚)接+12~24VDC,COM-(41脚)接该直流电源地。
直流电机模糊控制系统的MATLAB-Simulink仿真研究毕业设计
XXXX届毕业设计说明书 直流电机模糊控制系统 的MATLAB/Simulink仿真研究 院、部:电气与信息工程学院 学生姓名:XXX 指导教师:XXXX职称教授 职称 专业:XXXXXXXXXXXXX 班级:XXXXXXXXX 完成时间:20XX.X.X
摘要 在当今控制技术的发展当中,模糊控制技术的发展走在了前列,成为了当今世界上最先进的控制技术之一。模糊控制技术很好的将模糊数学理论应用于控制领域当中, 更加真切地模拟出了人脑的思维方式和判断能力, 以及对产品生产的过程进行筛选和对产品质量上的控制, 从而发展出了基于模糊控制技术的智能化的新技术,为当今控制技术的发展提供了广阔空间。 在本文当中,主要介绍了基于模糊控制理论的直流电机模糊控制系统的原理,以及直流电机模糊控制系统的优点和缺点,并通过使用MATLAB语言中SIMULINK 模块和模糊控制工具箱对直流电机模糊控制系统进行仿真,把控制直流电机调速的实际情况转换成模糊控制规则,再使用这些规则,对过程经过模糊推理和模糊决策所得到的控制量,从而实现在MATLAB语言中SIMULINK模块和模糊控制工具箱对直流电机模糊控制系统的建模与仿真。对仿真结果予以分析,对直流电机模糊控制系统的仿真进行总结。 关键词:MATLAB;SIMULINK;模糊控制;直流电机;电机调速
ABSTRACT Among today’s control technology development, one of the leading enterprises in the development of fuzzy control technology, fuzzy control technology has become one of the most advanced control technology in the world today, it will be a very good fuzzy control technology of fuzzy mathematics theory is applied in control field, the more realistically simulate the human brain’s way of thinking and judgment ability, as well as to the production process of screening and the control on the quality of product, which was developed based on fuzzy intelligent control technology of the new technology, for the development of modern control technology provides a broad expansion of space. in this article, mainly introduced the dc motor based on fuzzy control theory, the principle of fuzzy control system, as well as the advantages and disadvantages of the fuzzy control system for dc motor, and by using the SIMULINK module and the fuzzy control toolbox in MATLAB language for the calculation of the fuzzy control system of dc motor, the control of the actual situation of the dc motor speed control is converted into fuzzy control rules, and then use these rules, the process through fuzzy reasoning and fuzzy decision of control, thus to achieve the SIMULINK module and the fuzzy control toolbox in MATLAB language modeling and simulation of fuzzy control system of a dc motor. And the analysis to the results of simulation and simulation of fuzzy control system of dc motor. Keywordsmatlab;Simulink;fuzzy control;dc motor;motor speed control
PID控制器参数整定的方法,口诀
PID控制器参数整定的方法,口诀 P proportion 比例 I integration 积分 D differentiation 微分 PID用于控制精度比例是必须的,它直接影响精度,影响控制的结果 积分它相当于力学的惯性能使震荡趋于平缓 微分控制提前量它相当于力学的加速度影响控制的反应速度.太大会导致大的超调量使系统极不稳定.太小会使反应缓慢. 一般而言 PID调节是一个整体的说法在实际中 PID的比例积分微分并非总是同时使用 PI调节和PD调节使用较多. . PID调试步骤 没有一种控制算法比PID调节规律更有效、更方便的了。现在一些时髦点的调节器基本源自PID。甚至可以这样说:PID调节器是其它控制调节算法的妈。 为什么PID应用如此广泛、又长久不衰? 因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。 由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。这就给使用者带来相当的麻烦,特别是对初学者。下面简单介绍一下调试PID参数的一般步骤: 1.负反馈 自动控制理论也被称为负反馈控制理论。首先检查系统接线,确定系统的反馈为负反馈。例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。其余系统同此方法。 2.PID调试一般原则 a.在输出不振荡时,增大比例增益P。 b.在输出不振荡时,减小积分时间常数Ti。 c.在输出不振荡时,增大微分时间常数Td。 3.一般步骤 a.确定比例增益P 确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此
伺服电机的调试步骤
伺服电机的调试步骤 1、初始化参数 在接线之前,先初始化参数。在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。 6、调整闭环参数 细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。
2016多轴电机传动系统设计毕业设计
目录 一、项目设计需求分析 (1) (一)课题的背景与意义 (1) (二)任务设计的要求 (1) 二、系统硬件设计 (1) (一)主控模块的介绍 (2) (二)显示模块的介绍 (6) (三)驱动模块的介绍 (8) (四)电机模块的介绍 (10) 三、系统软件设计 (12) (一)程序设计流程图 (12) (二)电机加速部分 (13) (三)电机减速部分 (13) 四、系统的调试 (14) (一)系统硬件调试 (14) (二)系统软件调试 (14) 五、总结 (15) 参考文献 (15) 附录 (16) 附录1控制模块原理图 (16) 附录2控制模块PCB图 (16) 附录3调速驱动模块原理图 (17)
多轴电机传动系统设计 (电子信息工程技术专业电信13(2)班,闫宝成) 摘要:多轴电机传动系统是运动控制研究领域的重要课题之一,可应用于纺织、自动仪表车床、自动化设备等制造和生产过程自动化控制系统中。本文用单片机技术设计了多轴电机转动系统。该系统由控制模块、驱动模块、电机模块、显示模块组成。控制模块输出电机选择信号和电机运行速度信号给驱动模块,驱动模块驱动被选择电机按要求的速度运转,同时显示模块实时显示电机编号和转速。该系统大大的提高了生产效率,可以更好的控制流水线。 关键词: STC89C52RC单片机;PCF8591数模转换器;5110LCD显示;24V/30W 直流电机 一、项目设计需求分析 (一)课题的背景与意义 随着工业化的快速发展,企业的规模在日益扩大,同时伴随着生产流水线加长,传统的工业管理控制系统已经不能满足要求。一方面按照原有的生产管理模式会增加生产成本,另一方面人手的增多不便于工业的管理。这就需要一种新的模式来解决问题,多轴电机传动系统正好可以满足工业化发展的要求。 (二)任务设计的要求 用单片机作为主控模块设计的多轴电子转动系统需要实现以下要求: 1. 该系统使用5个直流电机,可以选择运行任意电机。 2. 运行电机可以加速,也可以减速。 3. 需要实时显示运行电机编号和转速。 二、系统硬件设计 图1系统设计框图
伺服驱动器参数设置方法
伺服驱动器参数设置方法 在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。 1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值由具体的伺服系统型号和负载情况确定。 2.位置前馈增益:设定位置环的前馈增益。设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。不需要很高的响应特性时,本参数通常设为0表示范围:0~100% 3.速度比例增益:设定速度调节器的比例增益。设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较大的值。 4.速度积分时间常数:设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较小的值。 5.速度反馈滤波因子:设定速度反馈低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡。数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。 6.最大输出转矩设置:设置伺服驱动器的内部转矩限制值。设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为 ON,否则为OFF。 在位置控制方式时,输出位置定位完成信号,加减速时间常数设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。加减速特性是线性的到达速度范围设置到达速度在非位置控制方式下,如果伺服电机速度超过本设定值,则速度到达开关信号为ON,否则为OFF。在位置控制方式下,不用此参数。与旋转方向无关。7.手动调整增益参数 调整速度比例增益KVP值。当伺服系统安装完后,必须调整参数,使系统稳定旋转。首先调整速度比例增益KVP值.调整之前必须把积分增益KVI及微分增益KVD调整至零,然后将KVP值渐渐加大;同时观察伺服电机停止时足否产生振荡,并且以手动方式调整KVP参数,观察旋转速度是否明显忽快忽慢.KVP值加大到产生以上现象时,必须将KVP 值往回调小,使振荡消除、旋转速度稳定。此时的KVP值即初步确定的参数值。如有必要,经KⅥ和KVD调整后,可再作反复修正以达到理想值。 调整积分增益KⅥ值。将积分增益KVI值渐渐加大,使积分效应渐渐产生。由前述对积分控制的介绍可看出,KVP值配合积分效应增加到临界值后将产生振荡而不稳定,如同KVP值一样,将KVI值往回调小,使振荡消除、旋转速度稳定。此时的KVI值即初步确定的参数值。
电机设计matlab程序
%电机设计程序 clear all format short e m1=3;p=2;f=50 %1.额定功率 PN=*10^3 ; %2.额定电压(单位V,三角形接法) UN=380;UN0=380; %3.功电流(单位A) IKW=PN/(m1*UN0) %4.效率eta按照技术条件的规定eta= eta= ; %5.功率因数cos(phi) =,按照技术条件的规定cos(phi)= phi=acos; cos(phi); %6.极对数p=2 p=2; %7.定转子槽数:每极每相槽数取整数。参考类似规格电机取q1=3,则Z1=2m1pq1,再查表10-8选Z2=32,并采用转子斜槽。 q1=3; Z1=2*m1*p*q1 Z2=32 ; %8.定转子每极槽数 Zp1=Z1/(2*p) Zp2=Z2/(2*p) %9.确定电机的主要尺寸;一般可参考类似电机的主要尺寸来确定Di1和lef.现按10-2中的 KE1=*log(PN/1000)*p+ P1=KE1*PN/(eta*cos(phi)) alphap1=;KNm1=;Kdp1=;A1=25000; Bdelta1=;n1=1450; V=(alphap1*KNm1*Kdp1))*(1/(A1*Bdelta1 ))*(P1/n1) D1=; %铁心的有效长度 Di1=; lef =V/((Di1)^2) %气隙的确定 %参考类似产品或由经验公式(10-10a),得 lt=;
delta = lef=lt + 2*delta D2=Di1-2*delta %转子内径先按转轴直径决定(以后再校验转子轭部磁密) Di2= ; %11.极距 tau tau =pi*Di1/(2*p) %12.定子齿距t1 t1=(pi*Di1/Z1) %转子齿距t2 t2=(pi*D2/Z2) bsk=; %15.设计定子绕组 Nphi11=eta*cos(phi)*pi*Di1*A1/(m1*IKW) %取并联支路a1=1,由式(10-15),可得每槽导体数 a1=1; Ns1=47 %16.每相串联导体数Nphi1 Nphi1=Ns1*Z1/(m1*a1) %每相串联匝数N1 N1=Nphi1/2 %17.绕组线规设计 %初选定子电密J11=5.0A/mm^2,由式(10-16),计算导线并绕根数和每根导线面积的乘积。 J11=; %其中定子电流初步估计值 I11=IKW/(eta*cos(phi)) Nt1Ac11=I11/(a1*J11)
交流电动机传动系统的控制技术发展综述
目录 1 引言 (1) 2异步电动机传动系统的控制策略 (1) 2.1 转速开环恒压频比控制 (1) 2.2转速闭环转差频率控制 (2) 2.3 矢量控制 (3) 2.4直接转矩控制 (3) 2.5 基于无速度感器的交流传动控制技术 (5) 3 同步电动机传动系统的控制策略 (6) 4 总结与展望 (8) 参考文献 (9)
交流电动机传动系统的控制技术发展综述 刘雪松大连交通大学 1 引言 现代电力电子技术的迅猛发展,新型电力电子器件不断问世,为交流传动奠定了 坚实的物质基础;控制理论的逐步完善大大提高了交流传动系统性能;现代信息技术 日新月异的发展,为控制系统技术的进步提供了保障;交流电机自身无可争辩的优势, 是拓展交流传动系统的良好基础。 交流传动系统在性能上也已取得了长足发展,具备了宽调速范围、高稳速精度、 快速动态响应及四象限运行等良好技术性能,其动、静态特性完全可以和直流传动系 统相媲美,被人们提了多年的“交流传动取代直流传动”的愿望正在变为现实。 交流传动系统之所以能有如此巨大进步,主要得益于电力电子学、微电子学和控制 理论的惊人发展,尤其是先进控制策略的成功应用。纵观交流电机控制策略的发展,先 后涌现出大量的方式方法,其中具有代表性的有:转速开环恒压频比(U/f=常数)控制、转差频率控制、矢量控制(磁场定向控制)、直接转矩控制等。此外,无速度传感器的 交流传动控制技术也已成为近年研究热点。这些策略各有优缺点,在实际应用中必须 根据具体要求适当选择,才能实现最佳效果,能全面了解上述各种控制策略非常重要。本文正是基于此目的,对交流电机的各种控制策略进行了较为全面的综述与比较,力 图反映交流传动在控制策略方面的最新研究进展。 2异步电动机传动系统的控制策略 2.1 转速开环恒压频比控制 最简单的异步电动机变压变频调速系统就是恒压频比控制系统。为了满足低速时 的带载能力,还须备有低频电压补偿功能。转速开环恒压频比控制调速系统通常由数 字控制的通用变频器-异步电动机组成,需要设定的控制信息主要有U/f特性、工作频率、频率升高时间、频率下降时间等,还可以有一系列特殊功能的设定。采用恒压频 比控制时,只要改变设定的“工作频率”信号,就可以平滑地调节电动机转速。低频 时或负载的性质和大小不同时,须靠改变U/f函数发生器的特性来补偿,使系统产生足够的最大转矩。 要使电机的转速得到快速响应,必须有效地控制转矩。开环恒压频比控制只控制 了电机的气隙磁通,而不能调节转矩,可以满足一般平滑调速的需要,但静、动态性
matlab电机实例
unction [sys,x0,str,ts,simStateCompliance] = BLDC_S(t,x,u,flag) %-----------------------------------------------------------------------
% 状态变量:X(1)=ia;X(2)=ib;X(3)=ic;X(4)=SETA;X(5)=OMEGA; % 输入量:u(1)=Ud; u(2)=TL; % 输出量:n, Tem, ia, ib, ic; %------------------------------------------------------------------------ %-----------------电动机参数--------------------------------------------- R = 0.23;L = 0.00498; M = -0.00005478; J = 0.025; P0=2; % 极对数 RR = diag([R R R]); LL = diag([L-M,L-M,L-M]); S = [2,-1,-1; -1,2,-1; -1,-1,2]/3; %----------------------------------------------------------------------- %SFUNTMPL General M-file S-function template % With M-file S-functions, you can define you own ordinary differential % equations (ODEs), discrete system equations, and/or just about % any type of algorithm to be used within a Simulink block diagram. % % The general form of an M-File S-function syntax is: % [SYS,X0,STR,TS,SIMSTATECOMPLIANCE] = SFUNC(T,X,U,FLAG,P1,...,Pn) % % What is returned by SFUNC at a given point in time, T, depends on the % value of the FLAG, the current state vector, X, and the current % input vector, U. % % FLAG RESULT DESCRIPTION % ----- ------ -------------------------------------------- % 0 [SIZES,X0,STR,TS] Initialization, return system sizes in SYS, % initial state in X0, state ordering strings % in STR, and sample times in TS. % 1 DX Return continuous state derivatives in SYS. % 2 DS Update discrete states SYS = X(n+1) % 3 Y Return outputs in SYS. % 4 TNEXT Return next time hit for variable step sample % time in SYS. % 5 Reserved for future (root finding). % 9 [] Termination, perform any cleanup SYS=[]. % % The state vectors, X and X0 consists of continuous states followed % by discrete states. % % Optional parameters, P1,...,Pn can be provided to the S-function and % used during any FLAG operation. % % When SFUNC is called with FLAG = 0, the following information % should be returned: % % SYS(1) = Number of continuous states. % SYS(2) = Number of discrete states. % SYS(3) = Number of outputs. % SYS(4) = Number of inputs. % Any of the first four elements in SYS can be specified % as -1 indicating that they are dynamically sized. The % actual length for all other flags will be equal to the % length of the input, U. % SYS(5) = Reserved for root finding. Must be zero. % SYS(6) = Direct feedthrough flag (1=yes, 0=no). The s-function % has direct feedthrough if U is used during the FLAG=3 % call. Setting this to 0 is akin to making a promise that % U will not be used during FLAG=3. If you break the promise % then unpredictable results will occur. % SYS(7) = Number of sample times. This is the number of rows in TS. % % X0 = Initial state conditions or [] if no states. %
控制回路PID参数整定方法精
Honeywell DCS 控制回路PID参数整定方法 鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此PID参数整定方法。 一、修改PID参数必须有“SUPPERVISOR”及以上权限权限,用键盘钥匙可以切换权限,钥匙已送交一联合主任陈胜手中; 二、打开要修改的控制回路细目画面,翻到下图所示的页面,修改PID控制回路整定的三个参数K,T1,T2; 三、PID参数代表的含义 K:比例增益(放大倍数),范围为0.0~240.0; T1:积分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有积分作用; T2:微分时间,范围为0.0~1440.0,单位为分钟,0.0代表没有微分作用。 四、PID参数的作用 (1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大K倍输出; 2、系统存在余差。 K越小,过渡过程越平稳,但余差越大;K增大,余差将减小,但是不能完
全消除余差,只能起到粗调作用,但是K过大,过渡过程易振荡,K太大时,就可能出现发散振荡。 (2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化。 (3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把T2取的太大,当T2由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果。 五、如果要知道控制回路的作用方式,可以进入控制回路的细目画面,进入下图所示页面: 其中“CTLACTN”代表控制器作用方式,“REVERSE”表示反作用,“DIRECT”代表正作用。 六、控制器的选择方法 (1)P控制器的选择:它适用于控制通道滞后较小,负荷变化不大,允许被控量在一定范围内变化的系统; (2)PI控制器的选择:它适用于滞后较小,负荷变化不大,被控量不允许有余差的控制系统;
三协伺服电机的调试步骤(精选)
三协伺服电机的调试步骤(精选) 1、初始化参数 在接线之前,先初始化参数。[2] 在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。 在三协伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置 3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大
Ziegler-Nichols参数整定控制器步骤与方法
Ziegler-Nichols参数整定控制器步骤与方法: 对于控制系统的一个开环传递函数: 试采用Z-N整定公式计算系统的P、PI、PID控制器的参数,绘制整定后的系统单位阶跃响应。 建立如下图所示的Simulink模型。 开环 最小二乘法的曲线拟合:(只对前30秒求出直线方程) 选定相应的时间序列找到相应的值记录需要拟合的点 时间序列:xout'0 Columns 1 through 9 0 0.6000 1.2000 1.8000 2.4000 3.0000 3.6000 4.2000 4.8000 Columns 10 through 18 5.4000 6.0000 6.6000 7.2000 7.8000 8.4000 9.0000 9.6000 10.2000 Columns 19 through 26 10.8000 11.4000 12.0000 12.6000 13.2000 13.8000 14.4000 15.0000 输出序列:yout' Columns 1 through 9 0 0 0 0 0 0.4200 1.4416 2.6924 3.9721 Columns 10 through 18 5.1850 6.2904 7.2759 8.1434 8.9010 9.5594 10.1300 10.6236 11.0501 Columns 19 through 26 11.4182 11.7359 12.0100 12.2465 12.4504 12.6262 12.7778 12.9086 线性拟合: cftool工具箱得出一个合适的直线,画出S曲线得到: 最后编写m文件,得到L=2.2,T=9.8-2.2=7,K=13.727 % %分别用单纯的比例控制、比例积分、比例积分微分控制 L=2.2;T=7;K=13.727 KP=T/(K*L)%纯比例控制 %simulink_P仿真开始 yP=y.data; save yP %PI控制 KPi=0.9*KP%积分的比例系数 TI=L/0.3;Ki=1/TI
实验三 PID控制器设计及其参数整定---已完成
实验三 PID 控制器设计及其参数整定 一、实验目的 1) 通过本实验,掌握使用Simulink 仿真设计连续和离散PID 控制器的方法。 2) 掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。 二、实验原理 PID 控制是最经典、应用最广泛的控制方法,是单回路控制系统主要的控制方法,是其他控制思想的基础。本实验针对被控对象,选定控制器的调节规律,在控制器的调节规律已经确定的情况下,控制系统的品质主要决定于控制器参数的整定。 1. 连续PID 控制器 本实验采用的PID 控制器传递函数为: 111()(1)(1)C p d d i i G s K T S T S T S T S δ=+ +=++ 或写成: ()i C p d K G s K K S S =+ + 有 ,p i d p d i K K K K T T = = 其中K p 、K i 、K d 分别为比例系数、积分系数和微分系数;T i 、T d 分别为积分时间常数和微分时间常数;δ为比例度。 控制系统的Simulink 仿真图如图1所示。连续PID 控制器如图2所示。 根据不同的参数设置,可以得到单纯的比例控制、比例积分控制、比例微分控制以及比例积分微分控制等不同的控制系统。 控制器参数的工程整定实验法,是通过对典型输入响应曲线所得到的特征量,按照动态特性参数法、衰减曲线法、临界比例度法、或经验法中的某一种方法,求得控制器的各个参数,进行工程整定,使系统的性能达到最佳。
图1 控制系统Simulink 仿真图 图2 连续PID 控制器Simulink 仿真图 2. 离散PID 控制器 将描述模拟PID 控制器的微分方程式化为差分方程,即为数字PID 控制算法。 1 ()(1) ()()()k p i d i e k e k u k K e k K T e i K T =--=++∑ 因为上式包含的数字积分项,需要存储过去全部偏差量,而且累加运算编程不太方便,计算量也较大,所以在应用中,通常都是将上式改为增量算法。 ()()(1) ()2(1)(2)[()(1)]()p I D u k u k u k e k e k e k K e k e k K Te k K T ?=----+-=--++ 即 ()(1)()u k u k u k =-+?