基于FTP的动态相位展开方法的研究
24
《激光杂志>>2004年第25卷第6期LASERJOURNAL(V01.25.No.6.2004)
换频谱。对频谱滤波,取出基频分量,然后作逆傅里叶变换,得到光场分布为:
吾(x,y,t):丛%赳expIj(27rfox+拳(x,y,t)]}
(4)
对参考平面上的光强分布作相同运算得到
言。(戈,y,f):掣。。ptj[2,rfoz十≯。(石,,,)3t(5)
其中≯。(并,),)是由于投影系统出瞳E在有限远引起的
附加相位调制。对于发散照明情况,由物体高度引起的相位△庐(x,Y,t)为
;~1
d1112
霹
L0
Object
\R
△声(戈,y,£)=≯(戈,Y,£)一声o(x,Y)
=黜tan器高删
㈤2删an菘百ii观飘i两
旧’
Im表示取函数的虚部,Re表示取函数的实部,“*”表示共轭。根据相位和高度的映射关系,可以得到物体的高度分布函数:
地小儿赢等等彖
∽
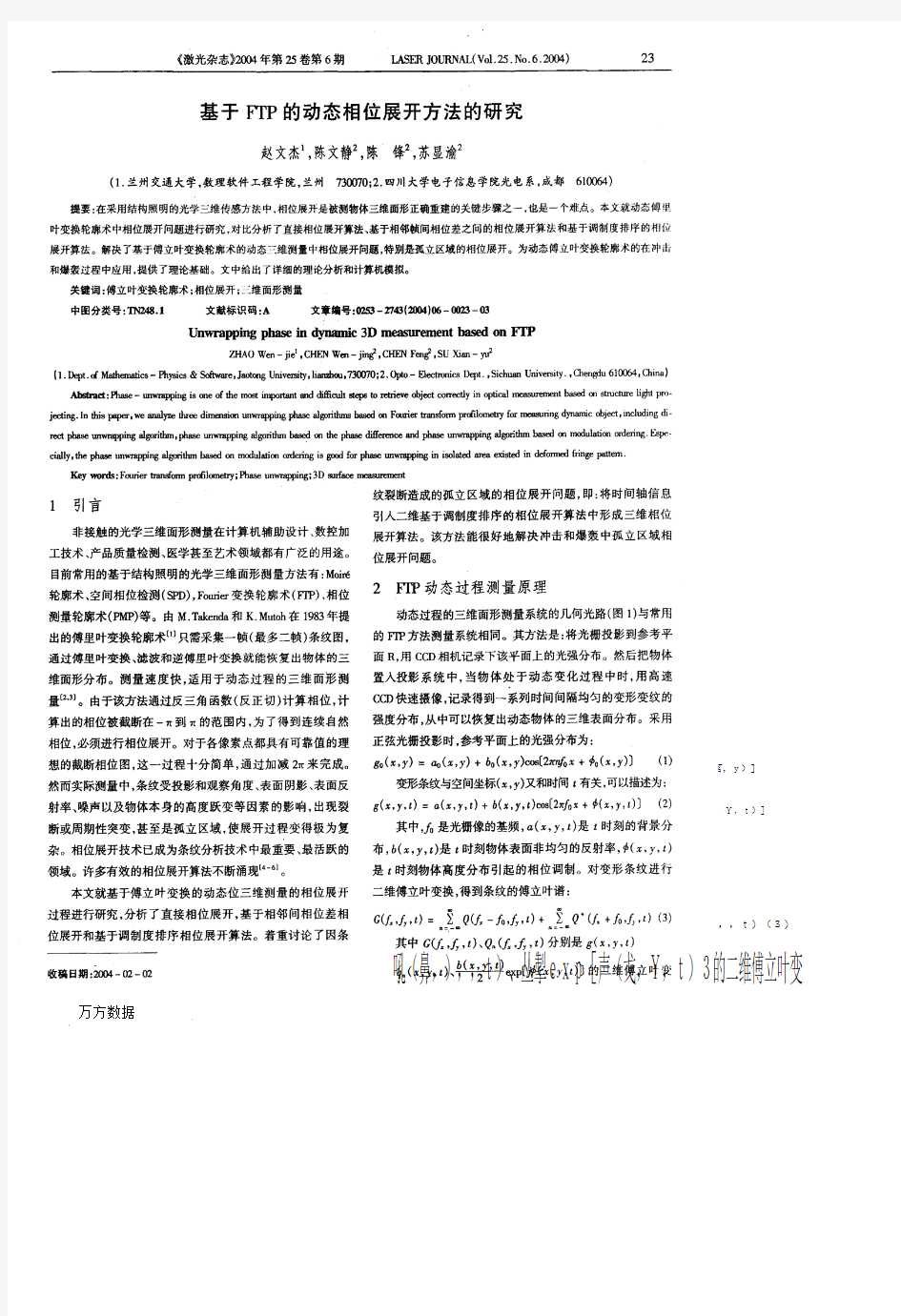
图l
图2图2a图3b图3c图3d
图4a
图4b
图4c图4d
图4e
3相位展开算法
通过反三角函数计算出的相位分布在(一丌丌)的主值
区间内,为了得到连续自然相位,必须进行相位展开。动态过程测量中计算得出的截断相位是关于空间坐标并,Y和时间
坐标t的函数,可以看作三维相位场。在理想条件下,相位的
展开与路径无关。但实际上,由于多种因素引起的变形结构光场的不完善,某些区域的相位值不确定,将给相位展开带
来困难。下面就三维相位展开问题进行讨论。
3.1直接相位展开算法
简单的直接展开法:对不同时刻的截断相位分别进行二维展开,得到各个时刻的相位分布。但当某一时刻物体的高
度变化很剧烈,引起条纹不完善,会导致相位不能正确展开。
例如:如图2所示,面a被截断线分为两个区域A和B,此时,B区域内的点P无论通过那条路径到达A区域内的Q点都
必须越过截断线,故a面内的相位无法正确展开。3.2基于相位差的相位展开算法
基于相位差的三维相位展开法:首先应该计算出相邻两帧之间的相位差
图4f调制度排序方
法的恢复结果
醣㈠儿ai-ctg%接等等删
然后展开一帧物体变化不大的相位图得到郇(并,Y,z),要求任一时刻K的展开相位群(戈,Y,K),只需计算:
K
zXj6(x,Y,K)=△≯(并,Y,1)+∑△≯,(工,)()
只要拍摄的帧速足够快,在方向--上I的时间Y间隔出很8t
小,两帧之间的相位差远小于/r,便可采用这种方法。但是
求和过程会引起展开过程中误差的传递、3.3基于调制度排序的相位展开
基于调制度排序的相位展开:首先根据物体调制度生成
可靠性模板。物体调制度定义为:
M(x,Y,f)=lg(髫,Y,t)I=b(戈,Y,t)/2
(9)
调制度正比于物体表面非均匀的反射率。这就意味着在局部阴影和物体高度起伏大的地方相位误差大,相应的调
制度就低,利用调制度来引导展开过程。先展开可靠性高的
点,再展开可靠眭低的点,展开过程不仅可以自动进行,而且可
以避免展开过程中误差的传递。如图2所示:时间轴上两相邻相位面d和8,采用此方法,提供了另一条路径PP’Q’Q,可以成
鸟
X
基于FTP的动态相位展开方法的研究
作者:赵文杰, 陈文静, 陈锋, 苏显渝
作者单位:赵文杰(兰州交通大学,数理软件工程学院,兰州,730070), 陈文静,陈锋,苏显渝(四川大学电子信息学院光电系,成都,610064)
刊名:
激光杂志
英文刊名:LASER JOURNAL
年,卷(期):2004,25(6)
被引用次数:9次
参考文献(6条)
1.张启灿;苏显渝动态液面面形测量[期刊论文]-光学学报 2001(12)
2.吴春才;苏显渝动态过程的三维面形测量 1996(05)
3.M Takeda;K.Motoh Fourier transform profilometry for the automatic measurement of 3 - D object shapes 1983(24)
4.Zhang H;Lalor MJ;Burton DR Spatiotemporal phase unwrapping for the measurement of discontinuous objects in dynamic fringe - projection phase- shifting profilometry 1999(16)
5.Xianyu Su;L.Xue Phase unwrapping algorithm based on fringe frequency analysis in Fourier-transform profilometry 2001(04)
6.T R Judge;P. J. Bryanston - Cross A review of phase unwrapping techniques in fringe analysis 1994
相似文献(10条)
1.学位论文孟亮傅立叶变换位相测量技术的研究2006
随着科学技术和工业生产的发展,在机器视觉、实物仿形、工业自动检测、产品质量控制、生物及医学检测等领域中,人们对三维面形测量的需求越来越多。当前,发展快速、高精度、非接触的三维面形测量技术成为科技领域中的一个研究热点。其中基于条纹投影的傅里叶变换轮廓术(FTP)具有单帧获取的优点,因此特别适合三维面形数据的实时动态测量.本文对FTP进行了几个方面的研究,其内容如下:分析了FTP测量方法的数学模型,阐述了高度与相位之间的转换关系,并介绍了小波理论的基础知识。
研究了小波变换在频域解相技术中的应用。对调制栅线图像进行小波变换,生成被测物体背景图像,两幅图像相减得到相对变形栅线图像,分离基频谱,由于背景成分基本消除,利于有用频带的提取,可以实现大梯度变化曲面和复杂形面的自动轮廓测量。
提出了一种新的基于路径的相位展开算法—基于曲面特征的截断线掩摸算法。先利用图像分割原理来进行目标与背景的分离,生成一次二值模板
,以消除阴影、背景杂物对相位展开的影响,再运用方向小波进一步检测出目标物体内导致极点密集的跳变区,生成二次模板将位相展开的错误限制在局部范围内,同时使用改进型的截断线算法进行去包裹。
研究了如何将高度z标定和平面位置(x,y)标定相结合而实现摄像机立体视觉标定的的方法。并实现了运用GeoMagic对测量点云数据的预处理以及生成曲面、拼接等操作,经过对比验证,手工拼接在服装、玩具等领域的逆向工程方面具有实用性。分析了FFT测试仪的系统结构,并编写了上位机程序。
2.学位论文张启灿动态过程三维面形测量技术研究2005
本论文从基本理论、频谱滤波、相位计算、相位展开和系统标定等方面,系统、全面地分析和讨论了基于FTP的动态过程三维面形测量技术的基本原理和方法,提出了用于三维相位展开的几种基本方法,完成了动态过程三维面形测量系统数据获取和处理的软硬件设计。最终形成了完整、系统的动态过程三维面形测量理论体系和实用系统。
按照动态过程运动变化速度的快慢和对动态过程三维面形测量时间分辨率的精度要求,本论文将作为研究对象的动态过程分为三类:慢变化过程、快变化过程和高速旋转与瞬态过程,进而分别针对性地设计和提出了三套三维面形测量技术方案和测量系统。
本论文中系统理论的建立和分析,三套技术方案及其各自测量系统的设计和提出,各技术方案下不同应用背景中的实物实验研究以及新方法的理论提出和实验验证等结果表明,在现有的光电技术、图像采集和处理技术以及计算机技术的支持下,用论文所提及的理论体系和技术方案对不同变化速度和不同领域中的动态过程进行三维面形测量是行之有效的,并且随着计算机技术和半导体技术的进一步发展,这些方法将在动态过程三维面形的实时检测和动态监测等工作中得到更大重视和广泛运用。
3.学位论文刘明健采用激光片光和线阵CCD的旋转体360°面形测量方法2004
该文在回顾三维面形测量的方法、应用前景的基础上,对傅立叶变换轮廓术的基本原理、频谱滤波、相位计算、相位展开等理论及应用问题进行了详细的讨论和分析.利用CCD器件具有的小体积、高分辨率及实时传输等特点,该文提出以激光片光投影正弦光栅到转动物体上产生结构照明光场,以步进电机驱动工作台旋转,采用线阵CCD作光电探测器件,应用傅立叶变换轮廓术对数据进行处理的旋转体360°面形测量方法.该文分析了在激光扇形片状光束照明下,光栅菲涅尔衍射光场的基本性质,讨论了这种一维分布的结构照明光场在三维传感中具有的一些独特优点,例如:具有较大的视场和较大的焦深,结构简单,易于调整等.该文设计了采用激光片光和线阵CCD的360°面形测量实验系统,设计和制作了线阵CCD的驱动电路,CCD光电信号采集和后续信号处理电路,转动工作台控制电路等.以单片机为中央控制单元,采用串口传送数据的方法将测得的对应物体三维面形的每条变形条纹数据传送到高端计算进行处理.采用数据拼接的方法形成物体的360°三维扫描数据,该数据实际上是一个以圆柱为参考面的二维变形条纹图.应用傅立叶变换轮廓术的基本原理,采用频谱滤波、相位计算、相位展开等基本方法重建了旋转体360°面形.该文还分析和讨论了系统误差和系统标定等问题.与传统的采用面阵CCD相机和采用TDI模式CCD相机进行旋转体的360°面形三维测量方法相比,该文提出的采用线阵CCD的方法降低了测量设备的成本,提高了测量分辨率.初步的实验表明,这种测量方法能正确的恢复物体的三维面形,具有较好的实用价值和应用前景.
4.期刊论文肖焱山.洪新华.XIAO Yan-shan.HONG Xin-hua采用相位图拼接的傅立叶变换轮廓术-激光杂志2008,29(3)
傅立叶变换轮廓术.在同一参考平面上转动物体获得不同方位的变形条纹图像,由阴影或突变所造成的截断或错位条纹分布在变形条纹图的小同部位,相位值不可靠的点也分布在相位图的不同区域,对旋转前后重建物体在信息可靠区域内进行标记拼接,恢复物体表面完整的三维信息.实验证实了比方法的有效性及实用性.
5.学位论文肖焱山动态过程中破裂表面的三维重建问题2006
在科学研究和工业生产中,往往需要对诸如高速旋转、流体力学、运动力学、弹道学、爆轰过程、冲击过程等动态过程的观察对象进行三维面形测量,以描绘和分析动态过程中被测物体表面形态的变化,提取与被测物体相关的结构、形变、应力等物理参数。在光学主动三维传感测量技术中,由于傅里叶变换轮廓术(FTP)具有只需要一帧变形条纹图就能恢复出物体面形的优点,特别适合动态过程的三维面形测量。目前,基于FTP的动态过程三维面形测量方法已成功应用于一些实际测量,本文在此基础之上进行了冲击破裂过程的动态三维面形测量研究。
在冲击、爆轰等动态过程中,被测三维表面将发生破裂、飞散等过程,为动态过程的三维重建带来困难;同时在这些快变化动态过程的研究中,若成像设备的拍摄速度低于动态条纹的变化速度,对动态条纹的时间抽样不满足抽样定理的要求,这也为动态过程的三维重建带来一些困难。本文针对在动态过程中破裂表面的三维重建问题,进行了系统的研究,提出了不同的三维面形重建方法。
若成像设备的拍摄频率满足抽样定理,对于表面发生破裂的快变化动态过程,提出一种三维面形重建方法。这种方法以傅立叶变换轮廓术为基础
,根据ccD所获取的条纹图中裂缝的信息,生成一个三维二元可靠度模板,在该模板的控制下,利用相邻相位面上的对应点绕开裂缝区域,避免相位值不可靠点对相位展开的影响,在相位展开过程中采用三维菱形快速算法,这样可以准确快速地获得动态过程中物体的三维面形分布。本文将此方法应用到玻璃破裂过程的三维面形重建中,经过相应数据处理,再现玻璃破裂的过程。
若成像设备的拍摄频率不满足抽样定理,本文首次提出一种采用标记条纹进行跟踪的动态过程三维重建方法。这种方法以FTP为基础,通过投影带有标记条纹的条纹图像到被测物体表面上,利用标记条纹跟踪锁定变形条纹中同级次条纹的变化情况,以确定相位展开的基准;对于表面发生破裂的情况,采用Gerchberg迭代算法在破裂区域生成伪条纹,这样能够有效地解决因成像设备在时间轴上的采样不足和条纹断裂等问题对快变化动态过程的三维面形重建所带来的影响。本文以瓷砖破裂过程的三维面形测量为例,应用所提方法进行破裂快变化过程动态过程的三维面形重建工作,数据处理结果证实这种方法的正确性,这有助于将普通成像设备应用到冲击、爆轰等快变化动态过程的三维面形测量技术中。
6.学位论文杜近宇傅立叶变换轮廓术纵向标定的研究2008
光学三维面形测量方法,以其非接触、测量速度快、精度高、易于在计算机控制下进行自动化测量等优势而得到深入研究和广泛应用。在众多的主动三维传感技术中,傅立叶变换轮廓术(Fourier Transform Profilometry,简称FTP)使得物体动态过程的测量变得可能,因为它只需要一帧参考条纹图和一帧变形条纹图就能将物体的三维形貌恢复出来。它的基本思想是利用信号的频谱特性来恢复被测物体的面形。
本论文主要研究成果和结论包括以下几个方面:
1.分析了三维数字成像过程中的各种相位解调方法,通过理论分析和公式推导,将投影光场的高次谐波误差和探测器的非线性响应误差统一合并为高次谐波误差。通过高次谐波对标准N帧相移算法位相计算影响的数值模拟证明了5帧以上相移算法对3次谐波以下误差具有极好的抑制能力。
2.从相位展开过程入手,对线性序列、正指数序列、负指数序列和广义序列四种时间相位展开算法进行了误差分析。
3.设计了一种新的三维数字成像系统标定装置,利用基于相移条纹投影轮廓术的标定方法对系统做了标定。标定结果表明,经过标定的三维数字成像系统,对于200×150×70mm3的标定空间,可以获得Z方向的标准差为0.0256mm的测量精度。并实物验证。
4.对标定后的系统误差作了分析,得出标定装置的系统误差是该标定方法的主要误差源,通过三坐标测量机等精密测量工具对标定装置进行矫正
,可以进一步提高三维成像系统的标定精度。
7.期刊论文张启灿.苏显渝.陈文静.曹益平.向立群咀嚼过程人脸颊外形动态变化的光学三维测量-光电子·激光
2004,15(2)
通过CCD摄像机快速获取由罗奇(Rochi)光栅投影到处于动态变化过程中人脸表面上的一系列变形条纹,经过傅立叶变换、频谱滤波、逆傅立叶变换及相位展开等处理后得到重建的一系列脸部颊面面形,再现处于咀嚼过程中的人脸颊部动态变化过程.
8.学位论文李剑爆轰过程动态三维面形测量技术2004
本文从基本理论、相位计算、相位展开等方面,对FTP应用于动态过程的三维面形测量进行了分析和讨论。首次将FTP测量方法应用到冲击、爆轰等力学过程的研究,提出了基于FTP的冲击、爆轰过程的动态三维面形测量方法,从理论基础、过程模拟、动态实验等方面进行了初步的研究,并取得了初步的实验数据及处理结果。
在实验研究方面,从爆轰装置设计、接收装置选择、投影方案设计,以及实验时序的安排等方面对整个实验方案进行了讨论。针对冲击、爆轰实验中高亮度照明的要求,设计了合适的投影方案,解决了动态实验中高亮度条纹光场的投影问题,获得了动态实验条纹。虽然条纹的质量还有待进一步提高,但爆轰过程初期被炸药驱动的对象的三维面形变化还是可以粗略的再现。根据初步的实验结果,提出了改进实验方案(特别是投影系统)的设想,为进一步的实验研究打下了基础。
本文首次获取了冲击、爆轰过程的FTP动态实验条纹,并对实验过程初期的条纹图进行了数据处理,实现了动态面形的三维重建。本文的理论分析和实验研究表明,用傅立叶变换轮廓术的方法对冲击、爆轰等力学过程进行测量是有发展前途和应用前景的。且随着研究工作的深入进行,这种方法有望在爆轰物理等国防领域中得到更大的重视和进一步发展。
9.学位论文岳慧敏基于时间相位展开的三维轮廓测量研究2005
时间相位展开是相位测量领域内的一种很重要的相位展开方法,被广泛应用于干涉型和结构照明型计量领域中,包括散斑干涉与剪切干涉计量、波长扫描干涉术、光弹测量、相位测量轮廓术、傅立叶变换轮廓术等领域。本论文对基于时间相位展开方法的三维轮廓测量进行了广泛深入的研究,主要研究成果如下:
1.基于直观的物理模型,讨论了时间相位展开方法的基本原理和算法设计,对比分析了几种主要方法在数据获取时间、计算时间与标准偏差等方面的优劣,对时间相位展开方法的最新进展和应用前景进行了全面的分析和评述。
2.对几种典型的时间相位展开方法进行了实验分析,并在此基础上提出了一种新的基于时间相位展开方法的三维坐标校准方法。对于模块校准过程中虚拟平面的连续相位分布的恢复及它们之间准确的相对位置的恢复问题,采用了负指数序列的时间相位展开的方法,这避免了原来方法中复杂的迭代运算和处理过程,实验结果说明了该校准方法的有效性和可行性。
3.提出了双频光栅相位测量轮廓术中低频光栅频率范围的确定方法,并对时间噪声存在时不同低频情况下双频光栅的频率优化问题,进行了理论分析及数值模拟。这对于不连续物体的三维重建尤其具有重要意义。
4.对于只投影一帧光栅图就可以测量物体轮廓的复合相位测量轮廓术进行了理论分析与实验研究,并将之与相位测量轮廓术进行了比较,对该方法的测量精度与适用范围给出了较明确的阐述,这对于复合光栅相位测量轮廓术的进一步应用具有实际指导意义。
5.提出了一种新的基于复合光栅投影的快速傅里叶变换轮廓术,采用该方法可以实现从一帧条纹图中消除零频对傅里叶变换轮廓术测量的影响,因此只需要一帧条纹图就可以恢复物体的三维面形。同传统的π相移方法相比,提出的新方法在没有明显降低测量精度的前提下,提高了测量速度,能使傅里叶变换轮廓术真正应用到实时高速测量。
10.会议论文张启灿.苏显渝冲击过程动态三维面形测量方法2004
提出了一种受冲击的物体表面三维面形动态变化测量的方法。用正弦分布的结构光场投影到处于快速冲击过程中的物体表面去调制物体高度分布
,使用高帧频 CCD 从另一角度获取随时间变化的、携带有物体高度变化信息的一系列变形条纹,随后采用傅里叶变换轮廓术的方法对这些条纹图进行傅里叶变换、滤波、逆傅里叶变换和三维相位展开等处理,就能再现受冲击物体面形的整个变化过程。该方法为冲击和爆轰领域中研究物体表面动态变化过程提供了一种新的方法。
1.任伟锋.苏显渝.向立群双频光栅用于动态过程破裂表面的三维重建[期刊论文]-光电工程 2010(3)
2.江磊基于FTP的三维轮廓测量方法及实验[期刊论文]-现代电子技术 2010(12)
3.肖焱山改进的动态过程三维面形重建技术[期刊论文]-三峡大学学报(自然科学版) 2009(5)
4.肖焱山.滕敏.洪新华基于条纹跟踪的动态过程三维轮廓术[期刊论文]-激光杂志 2009(6)
5.彭瑾.王黎.高晓蓉.王泽勇Fourier变换轮廓术中参数的选择和优化研究[期刊论文]-现代电子技术 2009(2)
6.肖焱山.洪新华采用相位图拼接的傅立叶变换轮廓术[期刊论文]-激光杂志 2008(3)
7.肖焱山.苏显渝.张启灿.李泽仁采用标记条纹跟踪的冲击过程三维轮廓术[期刊论文]-光电工程 2007(8)
8.陈凡秀.何小元连续振动悬臂梁的瞬时三维形貌测量[期刊论文]-光学学报 2006(11)
9.岳慧敏基于时间相位展开的三维轮廓测量研究[学位论文]博士 2005
本文链接:https://www.360docs.net/doc/7b6888887.html,/Periodical_jgzz200406010.aspx
授权使用:第二炮兵工程学院(depb),授权号:fa1c5622-e8ed-4842-986b-9f0600d92c1f
下载时间:2011年6月18日
相位解缠算法研究
一、引言 合成孔径雷达干涉测量技术(synthetic aperture radar interferometry, InASR)将合成孔径雷达成像技术与干涉测量技术成功地进行了结合,利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确的测量出图像上每一点的三维位置和变化信息。 合成孔径雷达干涉测量技术是正在发展中的极具潜力的微波遥感新技术,其诞生至今已近30年。起初它主要应用于生成数字高程模型(DEM)和制图,后来很快被扩展为差分干涉技术( differential InSAR , DInSAR)并应用于测量微小的地表形变,它已在研究地震形变、火山运动、冰川漂移、城市沉降以及山体滑坡等方面表现出极好的前景。特别,DInSAR具有高形变敏感度、高空间分辨率、几乎不受云雨天气制约和空中遥感等突出的技术优势,它是基于面观测的空间大地测量新技术,可补充已有的基于点观测的低空间分辨率大地测量技术如全球定位系统(GPS)、甚长基线干涉(VLBI)和精密水准等。尤其InSAR在地球动力学方面的研究最令人瞩目。 二维相位解缠是InSAR 数据处理流程中重要步骤之一,也是主要误差来源,无论是获取数字高程模型还是获取地表形变信息,其精确程度都高度依赖于有效的相位解缠。因此,本人在课程期间对相位解缠的相关文献进行了阅读。 二、InSAR基本原理
用两副雷达天线代替两个光源1S ,2S ,对地面发射相干信号,将 得到类似的条纹图。因为雷达信号与光线本质上都是电磁波,所以只要保证雷达天线载具运行轨道的稳定,那么两个信号到达地面上某一点处的路程差是确定的,只与该点在地面上的位置有关。在 InSAR 干涉测量中有两种模式,一种是在载具(卫星或飞机)上搭载一具天线,而载具两次通过不同轨道航线飞经目标地域上空,此种称之为单天线双航过模式;另一种在载具上搭载两副天线,只飞经目标地域上空一次,此种方式称之为双天线单航过模式。不论是哪种方式都可以用图 2.2 来模拟并作出几何解释。 在测量中两副天线或两次航过接收的数据可以各获得对地面同一区域的两幅包含幅值与相位信息的二维复数据图像,分别以1S ,2S 表示为 111114||exp()||exp()j r S S S π?λ==
相位编码结构光三维测量技术研究
相位编码结构光三维测量技术研究 结构光(SL)技术由于其非接触,高分辨率,高速度和全场自动化的优点而被广泛开发用于三维(3D)测量。条纹投影轮廓术(FPP)是三维测量中应用最广泛的结构光技术之一,例如逆向工程、工业检测、制造和机器人导航。FPP系统将条纹图投影到被测物体上,并记录被物体调制后的变形条纹图,然后利用特定的条纹分析方法,使用处理/分析系统从记录的图像中计算出调制相位。提取相位的准确性直接影响被测物体的三维重建结果。 本论文旨在提高基于相位编码结构光的三维测量系统的性能,力图为条纹投影轮廓术拓宽实用范围奠定理论基础。针对投影仪非线性Gamma标定和矫正、分段量化相位编码方法和基于N步相移的三维测量方法等关键问题进行如下研究工作:1、研究了传统相位编码方法及其一系列改进方法。码字在基于相位编码的相位解包裹方法中具有重要意义,每个相位编码条纹用一个唯一的码字标记,然后用于确定条纹级次。然而,传统的相位编码方法相邻码字之间的差值为1,相邻码字之间的差值过小。 由于系统的非线性效应和离焦影响,在高频条纹情况下条纹级次的计算容易产生误差,从而导致相位展开误差。传统相位编码方法受到码字数量的限制,导致条纹数量不能过大,影响其测量精度。2、数字条纹的正弦性是影响测量精度的一个主要因素。在数字投影相移法中,相位误差主要来源于条纹图像的非正弦性,而条纹图像的非正弦性是由于商用投影仪的非线性Gamma效应产生的结果。 为此,本文在研究对比分析了各种方法的基础上,采用七阶多项式对投影和成像系统进行建模,确定投影仪非线性Gamma的反函数。并以此生成待投影的预矫正正弦条纹,最终成像系统可以捕获理想正弦条纹。3、为了使相位编码方法的条纹级次计算更准确,同时也为了提高其测量精度,本文提出了一种基于分段量化相位编码的三维测量方法,在不减小相邻量化相位值之间的差异或提高量化等级的情况下实现绝对相位恢复。量化相位由特定的编码序列S“135246”进行调制,然后将其嵌入到相位编码条纹图中,这大大提高了解码的精度。 编码时将整个区域分成多个子区域,每个子区域嵌入上述编码序列S,通过相应的解码算法计算出条纹级次,最终得到绝对相位。4、减少条纹投影轮廓术的条纹图数量一直是本领域的研究热点。相位编码方法或其他时域相位展开算法通
INSAR相位解缠方法比较分析
INSAR相位解缠方法比较分析 【摘要】合成孔径雷达干涉测量技术(Interferometric Synthetic Apeurtre Radar,简称InSAR)是近二十年发展起来的一种先进的空间观测技术,它通过对同一地区的两幅单视复数图像进行配准、干涉、去除平地效应、滤波、解缠、地理编码等一系列处理,最终获取DEM。相位解缠是InSAR数据处理的关键技术和难点,也是InSAR产品的主要误差源。本文选取相干性较好四组SAR影像对进行实验,借助于Mcrosoft visual C++6.0平台和Matlab平台,对六种最常用的解缠方法从解缠精度和效率两个方面来分析比较各种方法。 【关键词】InSAR;缠绕相位;相位解缠;误差 合成孔径雷达(Synthetic Apeurture Rada,简称SAR)是50年代末研制成功的一种微波传感器,也是微波传感器中发展最快、最有效的传感器之一。它是一种主动传感器,与其他测地技术相比,SAR具有不受光照以及恶劣天气等条件的影响,可进行全天时、全天候地对地观测,对地物具有一定穿透能力,分辨率不受传感器平台高度的影响等优点。因此,被广泛地应用于地质、环境、海洋、水文、灾害、测绘、农业、林业、气象和军事等领域。 早在1952年,美国Goodyear宇航公司便研制成功了第一个实用化的SAR 系统,1953年获得了第一幅机载SAR影像,到70年代中期机载SAR技术己经比较成熟,到了70年代末期星载SAR已经由实验研究转向了应用研究,进入80年代后,星载SAR得到了迅猛发展。我国1976年开始研制合成孔径雷达,1979年获取了我国第一批合成孔径雷达图像,1987我国研制了新一代机载合成孔径雷达系统,90年代初,中国研制出机载合成孔径雷达实时成像传送处理器,目前我国星载SAR系统也正在积极研究当中。 InSAR是基于SAR成像基础和干涉测量原理上的一种雷达主动成像遥感测量技术。它的原理是通过两副天线同时观测,或一定时间间隔的两次平行观测,获取同一景观的复图像对,由于目标与天线的几何关系,在复图像对上产生相位差,形成干涉图纹。干涉图包含了图像点与天线位置差的精确信息,干涉合成孔径雷达相位解缠算法利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确地测量出图像上每一点的三维位置。 InSAR干涉测量数据处理流程分为七个步骤,分别为:图像配准,配准完成后主图像和重采样的辅图像复共轭相乘,去平地效应,滤波处理,相位解缠,基线估计,生成DEM。其中,相位解缠是干涉数据处理过程中关键环节,直接影响数字高程模型(DEM)的精度。 由于三角函数的周期性,干涉图中各点的相位值只能落入主值(- ,]的范围内,所以干涉纹图中的相位只是真实相位的主值,要得到反映高程信息的真实相位值必须对每个相位值加上2 的整数倍,这个过程称为相位解缠。 相位解缠是InSAR数据处理中的重要环节,自20世纪70年代末至今人们已经发展了几十种相位解缠算法,这些算法可以分为三大类,第一类是以枝切法为代表的基于路径跟踪的相位解缠算法,它主要是通过沿着预先确定的一致性路径进行相邻像元的相位差值积分来实现相位解缠。积分时路径要绕开一些低质量、不一致的区域,这是路径跟踪算法的核心思想。这些方法都是一种局域算子,即误差被限制在局部区域内不会传播。第二类是以最小二乘算法为代表的基于最小范数思想的相位解缠算法,它是通过在整体上使缠绕相位的梯度与真实相位的
InSAR图像相位解缠的最小费用流法及其改进算法研究
InSAR图像相位解缠的最小费用流法 及其改进算法研究 蒋廷臣1,2,焦明连1,史建青1,王秀萍 1 (1.淮海工学院测绘工程学院,江苏连云港 222001; 2.武汉大学卫星导航定位技术研究中心,武汉 430079) 摘要:最小费用流法是基于网络流的相位解缠方法,解决了许多解缠方法无法消除相位噪声对高相干区域影响的问题,在此基础上,本文针对该方法解缠时速度较慢和对计算机性能要求较高的缺点而提出改进算法,即将干涉图像分为若干子区域分别进行处 理,再利用基于Contourlet变换的超小波方法进行融合处理,最后用算例进行了验证,结果表明最小费用流法及其改进算法是一个 较好的解缠方法。 关键词:干涉测量相位解缠最小费用流法分块算法小波融合 一、前言 随着测绘新技术新理论的发展,现代大地测量范畴得到了较大拓宽,现在,合成孔径雷达干涉测量(Interferometry Synthetic Aperture Radar—InSAR)已成为其分支学科。合成孔径雷达干涉测量 ( InSAR)利用合成孔径雷达数据的相位信息提取地面三维信息,主要用于测量地面的高程和监测其变形。随着COSMOS和terraSAR卫星的发射成功,该技术日益受到各国政府部门以及科学工作者的重视。 在InSAR数据处理过程中,相位解缠是合成孔径雷达干涉测量的关键流程,它的准确性直接影响到 InSAR生成的数字高程模型的精确性。现在所有的解缠方法都是基于这样的假设,即 φ差的绝对值小于π。解缠后的真实相位是平滑且变化缓慢,同时图像各相邻像素的干涉相位 但是,雷达阴影、去相关等因素引起的噪声和伪信号往往造成相位数据不连续,给相位解缠带来极大的困难,目前大部分算法都无法圆满地解决这些问题 ,解缠的结果常常会有较大的误差,由此得到的数字高程模型就会与实际情况存在较大的差别。如何能够从质量较差的数据当中提取有用的信息,而忽略噪声对解缠过程的影响,成为一个急待解决的问题。 基于上述,本文根据统一的解缠数学模型和网络优化原理,阐述了最小费用流法法的相位解缠方法,并针对该方法解缠时速度较慢而提出分块算法,将整幅图像分为若干子区域分别进行处理 ,再利用超小波方法进行融合处理,从而得到较理想的解缠效果,同时利用算例进行了比较分析,较好地解决了上述问题。 二、最小费用流法解缠原理 2.1统一解缠模型 经过多年对相位解缠方法的研究,现在已有很多的解缠方法。在1996年,Ghiglia和Romero 第一作者简介:蒋廷臣(1975-),男,汉族,四川蓬安人,武汉大学测绘学院博士生,主要从事GPS与宽幅SAR融合的相关理论与方法研究。 第二作者简介:焦明连(1963-),男,汉族,河南商丘人,副教授,主要从事主要从事精密工程测量和测绘教育研究。
枝切法与曲面拟合结合的InSAR相位展开算法
2012年10月 第39卷第5期 西安电子科技大学学报(自然科学版) JOURNAL0FXIDIANUNIVERSITY 0ct.2012 V01.39NO.5 doi:10.3969/j.issn.1001—2400.2012.05.009 枝切法与曲面拟合结合的InSAR相位展开算法 张妍,冯大政,曲小宁 (西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071) 摘要:为了解决干涉合成孔径雷达(InsAR)相位被缠绕的问题,提出了一种基于枝切法与曲面拟合的合成 相位展开算法.这种算法针对干涉相位图中不同质量的区域呆用不同的展开策略,首先利用枝切法准确性 高的特点展开高质量区域的相位,然后利用曲面拟合的方法对低质量区域的相位进行拟合,最后利用遗传 算法对拟合函数进行修正来获得最终的展开相位.仿真实验和实测数据表明,该方法很好地克服了枝切法 的“孤岛现象”和最小二乘法存在相位坡度欠估计的情况,且比其他方法的精度高. 关键词:干涉合成孔径雷达;相位解缠;枝切法;曲面拟合;遗传算法 中图分类号:TN958文献标识码:A文章编号:1001-2400(2012)05004707 Hybridphaseunwrappingalgorithmcombiningbranch。cutand surface—fittingforInSAR ZHANGYan,FENGDazheng,QUXiaoning (NationalKeyLab.ofRadarSignalProcessing,XidianUniv.,Xi’an710071,China) Abstract:Ahybridphaseunwrappingalgorithmthatcombinesthebranch—cutalgorithmandsur[ace—fitting methodisproposedtoslovetheproblemofphasewrappingintheInterferometricsyntheticapertureradar (InSAR).Thealgorithmappliesdifferentmethodsindifferentqualityregionstounwrapthephase.Itfirst usesthebranch—cutalgorithmtounwrapthephasesinhighqualityregionsforthebenefitofhighaccuracy, thenusesthesurface-fittingmethodtofitthephasesinlowqualityregionsandfinally,optimizesthe coefficientsofthesurface—fittingfunctionusingthegenealgorithmtoobtaintheunwrappedphase.Both simulatedandexperimentalresultshaveshownthatthenewalgorithmcanavoidthe”isolatedisland phenomenon”ofthebranch—cutalgorithmandthephasegradienterroroftheleast—mean-squarealgorithm. Theproposedhybridalgorithmismoreprecisethanothermethods. Key Words:interferometricsyntheticapertureradar;phaseunwrapping;branch—cut;surface—fitting; geneticalgorithms 干涉合成孔径雷达(InSAR)是一种重要的遥感测量系统,它能够有效获取目标的数字高程模型(DigitalElevationModel,DEM).但在实际测量中,由于得到的干涉图中相位存在2丌的模糊,必须将模糊的相位恢复出来才能得到目标的高程信息,因此模糊相位的展开是InSAR信号处理中的关键一步. 而目前相位展开方法主要可分为路径跟踪法和最小范数法.路径跟踪法u。3。通过选择合适的积分路径,将误差传递限制在噪声区域内,从而阻止相位误差在整个图像平面内的传递.典型的路径跟踪法以枝切法H“o为代表,它通过识别干涉图中的正负残差点并在它们之问建立路径枝切线,积分时避开这些枝切线来实现相位展开.这种方法最大的优点就是消除了因积分路径不同而出现的相位解缠结果不一致的现象,避免了误差扩散到整个图像中去.但在残差点较多的区域,枝切线容易形成环路,从而导致部分区域无法解缠收稿日期:201112-13网络出版时间:2012-05—23 基金项目:国家自然科学基金资助项目(60971111) 作者简介:张妍(1979一),女,西安电子科技大学博士研究生,Email:zhangyancandy@hotmail.corn 网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20120523.1633.201205.62—001.html 万方数据
条纹结构光三维测量中多频相位展开与高亮抑制方法研究
条纹结构光三维测量中多频相位展开与高亮抑制方法研究 条纹结构光三维测量技术以其高准确度、高效率和非接触的优点在高速检测、产品开发、质量控制、反向工程等领域得到广泛的应用和发展。其测量准确度随着硬件设备和图像处理技术的发展而大幅度提高,但针对复杂被测物,其容错能力、抗干扰能力较弱,从而制约了其实用性。为此,本文研究采用普通条纹结构光三维测量方法,针对复杂被测物受相位展开方法和表面特性影响带来的测量误差,研究多频相位展开方法、表面高亮抑制方法及其装置。1.本文对于目前展开相位的复杂计算,范围有限和波长位置跃跳导致大误差的问题,提出一种双频条纹结 构光相位展开方法,建立其数学模型。 进而,针对实际应用环境,对提出的相位展开方法进行了误差分析,推导其误差容限。通过三维测量与抗干扰能力仿真验证实验,在有干扰和无干扰环境下, 验证双频相位展开数学模型和误差分析的正确性。2.针对现有多频模式时间相位展开方法,即多频分层、多频外差和多频数论,通过测量原理阐述、测量误差分析、数值仿真实验与本文双频条纹结构光相位展开方法进行对比研究。鉴于投射图案起止点存在跃跳误差问题,提出一种错位双频条纹结构光相位展开方法,完成其 理论分析和数值仿真验证。 3.为进一步拓展条纹结构光量程,或在同量程范围内提高相位展开方法的抗干扰能力,将双频相位展开方法拓展到三频相位展开方法。建立其数学模型,对提出的相位展开方法进行误差分析,推导其误差容限。分析条纹结构光组合的等效波长,给出最优频率组合准则。通过三维测量与抗干扰能力仿真验证实验,在有干扰和无干扰的仿真环境下,验证三频相位展开数学模型和误差分析的正确性,以 及在误差、抗干扰能力方面的有效性。 4.针对条纹结构光测量过程中高亮区域导致测量失效,提出基于线性扩散板的高亮抑制方法,推导出入射光线经过线性扩散板之后的辐射照度与高亮点反射光线的辐射亮度表达式,建立了基于辐射度量学的线性扩散板抑制高亮原理模型。为进一步消除高亮区域,针对现有高亮抑制算法存在复杂的图像分割问题,提出 反射分量分离理论与基于优先级的像素填补方法相结合的强反射表面高亮抑制 图像处理算法。5.提出和实现条纹结构光三维测量的高亮抑制方案和装置,针对典型表面和复杂表面进行三维测量实验。实验表明,双频和三频条纹结构光相位
一种软件测量相位差方法研究
一种软件测量相位差方法研究 作者:杨明1姜万东1宋国云2 (1.珠海万力达电气股份有限公司,广东珠海 519085; 2.酒泉超高压输变电公司,甘肃酒泉 735000) 摘要:传统测相位的办法是通过定时采样信息,经过快速傅立叶变换进行分析,这种做法要求采样点是整个周期的信息,还要进行复杂的作商、求反正切计算,运算量大,对系统时间造成一些浪费。作者根据传统测量方法进行拓展,提出了一种新颖的相位差测量方法,计算量小,用时少,精度高,特别适用于单片机环境下的软件测相位使用。 关键词:相位差;快速傅立叶变换(FFT);单片机;软件测相位 相位差测量是工频交流电气测量技术的一个很重要的部分,电力系统中研究相位差是实现系统并列、准同期、无扰动合闸等工艺的重要前提条件,对系统稳定运行具有重要的意义。 传统的软件测相位的办法是通过定时采样一个周波的信息,利用快速傅立叶变换(FFT),将两个电气测量量的实部、虚部求出,然后对虚部差、实部差之商经过一次反正切计算,得出相位差。该方法运算量大,对系统资源浪费严重,对一些时间性要求比较苛刻的场合应用有局限性。为解决这一矛盾,本文利用考核过零点的时间差,求的相位差,研究数字滤波器,对提高测量精度有重要的意义。 1 信号采样 电气测量一般为50Hz的正弦波,为了满足测量精度、获得充裕的系统应用时间,本方 15电角度。通过单片机的定时中断,法使用的是每周24点的采样密度,既每个采样间隔是 读取中断时刻AD中各路模拟量的数值,分别储存至相应的寄存器数组中,如通道A、B的寄存器分别为AD_BUF_A[order]、AD_BUF_B[order],其中order表示采样点次序,通道A、B采样点次序严格一致。 相位测量对所测的电气量的谐波要求比较严格,所以采样电路的前级的滤波措施要得当,专门的带通滤波器电路,可以很好地解决谐波问题,但是由于滤波回路会产生一些相角偏移,所以滤波器件的选型要严格。为了使测量误差尽可能的降低,为此,软件的滤波措施也要考虑。 2采样数据处理 以通道A为基本相位,研究通道A与通道B过零点的时间差,进而求解两者之间的相位
InSA_R相位解缠最小范数算法的研究
InSAR相位解缠最小范数算法的研究 第一章绪论 1.1论文研究的背景 合成孔径雷达干涉测量(InSAR)是20世纪60年代末发展起来的一项技术,在近20年来受到了世界各国的广泛关注获得了迅猛发展并逐渐趋于成熟。由于合成孔径雷达干涉测量主要是利用主动微波式传感器,它的出现大大地扩展了合成孔径雷达、光学传感器等的应用领域。它不仅能够获取高精度的高程信息,同时还可以全天时、全天候监测陆地表面和冰雪表面地形等的微小变化,监测的时间间隔从几天到几年,监测精度可达毫米级,并且它对某些目标物体还具有一定的穿透能力。其更令人瞩目的是,这项技术还可用于研究过去长时间无法到达的冰川和冰源的变化情况,也可用于一些灾害性地表形变的探测,如地震、火山爆发、等以及地表三维的重建,因而成为了遥感研究的热点川。 1.1.2 相位解缠研究的现状 相位解缠技术最早出现在20世纪60年代末70年代初,当时主要是信号处理的需要,所研究的主要是一维问题。除合成孔径雷达干涉测量中应用外,还在合成孔径声纳、光学干涉、微波干涉、核磁共
振等方面有重要应用。二维相位解缠始于20世纪70年代末。在 过去的30多年里,InSAR的相位解缠的方法发展十分迅速,达到了三、四十种,文献(王超,2002)列出了多种算法,但以上基本上可以分为两大类,即路径跟踪法(Path Following)和最小二乘法(Least Square),路径跟踪法基于像元到像元的局部运算来解缠,而最小二乘法是通过使解缠后解缠前相位的梯度差整体最小来进行求解的。 各种算法都有其自身的优缺点,适用于特定条件的数据,普适性都不是很好,因此算法的选择一般应根据实际情况而定。 1.2 本文研究内容 我国是一个地质灾害频繁的国家,近些年来各种地质灾害接踵而来,如地震、滑坡、地面沉降等,这些地质灾害以地表形变为直接特征,严重影响了人民生命与则一产的安全,因此对地表形变的监测显得尤为重要。合成孔径雷达技术能够利用雷达信号中的相位信息来提取地表的三维信息,精度可达毫米级,己成为目前DEM生产的主要技术手段之一,在地下资源探测以及军事目标探测等方面都具有其独特的优越性和发展潜力。相位解缠作为InSAR技术应用处理中至关重要的一个环节,也因此显得尤为重要。 本文主要研究内容包括以下几个方面: 1、对相位解缠中最小范数算法的理论进行归纳和研究. 2、从对合成孔径雷达干涉测量的常用数据分析入手,在C#编程语言的基础上,结合WPS, GIS等技术和手段,对基于最小范数算法的InSAR相位解缠软件的四种基于最小范数相位解缠算法,包括
图割算法在相位解缠中的应用
图割算法在相位解缠中的应用 摘要:相位解缠一直以来是干涉测量领域中的一个重要研究方向。传统的相位解缠算法的解缠结果易受到噪声或者截断相位的影响。为了解决上述问题,提高解缠精度,在模拟的存在截断相位缺陷的数据上,建立马尔科夫能量模型,推导出能量函数,使得相位解缠变成一个求解全局最优化的问题,利用图割理论求解。实验结果表明,图割理论能够很好的完成能量函数的优化,解缠结果在抗噪性以及精度上,比起传统的解缠算法都有着一定优势。那么就意味着,该方法在相位解缠方面有着重要的研究价值和宽阔的应用前景。 Abstract:Phase unwrapping is an important field in interference measurement. The traditional phase unwrapping algorithms are easily affected by noise or discontinuous phase. In order to solve the problems and improve solution accuracy,establishing markov energy model,getting the energy function,making the phase unwrapping into a global optimization problem on the datas of simulation of discontinuous phase,using the graph cuts solve the problem. The experimental results show that the optimization of energy
测量相位差的主要方法
一二测量相位差的方法主要有哪些? 测量相位差可以用示波器测量,也可以把相位差转换为时间间隔,先测量出时间间隔,再换算为相位差,可以把相位差转换为电压,先测量出电压,再换算为相位差,还可以与标准移相器进行比较的比较法(零示法)等方法。 怎么用示波器来测量相位差? 应用示波器测量两个同频正弦电压之间的相位差的方法很多,本节介绍具有实用意义的直接比较法。将u1、u2分别接到双踪示波器的Y1通道和Y2通道,适当调节扫描旋钮和Y增益旋钮,使荧光屏显示出如图2.42所示的上、下对称的波形。 比较法测量相位差 设u1过零点分别为A、C点,对应的时间为t A、t C;u2过零点分别为B、D点,对应的时间为t B、t D。正弦信号变化一周是360°,u1过零点A比u2过零点B提前t B-t A出现,所以u1超前u2的相位。 u1超前u2的相位,即u1与u2的相位差为 (2.56) T为两同频正弦波的周期; ΔT为两正弦波过零点的时间差。 数字式相位计的结构与工作原理是什么?
三数字相位计框图 将待测信号u1(t)和u2(t)经脉冲形成电路变换为尖脉冲信号,去控制双稳态触发电路产生宽度等于ΔT的闸门信号以控制时间闸门的启、闭。晶振产生的频率为fc的正弦信号,经脉冲形成电路变换成频率为fc的窄脉冲。 在时间闸门开启时通过闸门加到计数器, 得计数值n,再经译码,显示出被测两信号的相位差。这种相位计可以测量两个信号的“瞬时”相位差,测量迅速,读数直观、清晰。 数字式相位计称做“瞬时”相位计,它可以测量两个同频正弦信号的瞬时相位,即它可以测出两同频正弦信号每一周期的相位差。 基于相位差转换为电压方法的模拟电表指示的相位计的测量原理是什么? 如图2.44所示,利用非线性器件把被测信号的相位差转换为电压或电流的增量,在电压表或电流表表盘上刻上相位刻度,由电表指示可直读被测信号的相位差。转换电路常称做检相器或鉴相器。常用的鉴相器有差接式相位检波电路和平衡式相位检波电路两种。 数字相位计框 图
实验二 相位差测量
实验二相位差测量 一、实验目的 1、掌握将相位差转换为电压的原理。 2、掌握脉冲电压的脉宽与电压平均值成正比的原理。 3、掌握磁电系仪表的基本读数是电流(电压)的平均值。 4、了解硬件电路的设计方法和基本的硬件调试方法。 二、实验类型 综合型 三、实验仪器 四、实验原理 1、原理图
Y 图1 相位表原理图 2、 电路原理 此电路可以检测-180--+180的相位差。两路输入信号Y1、Y2经整形后成为两路与原信号同频率同相位的方波。方波送入异或门CD4070,CD4070的输出是电压脉冲,脉冲宽度与输入信号的相位差绝对值成正比。用磁电式仪表测CD4070的输出电压(根据磁电系仪表的原理,测量值为电压的平均值),测量值Uo 与脉冲宽度成线性关系。因此可得Uo 与输入信号的相位差绝对值成正比。输入信号的超前、滞后由LED 显示,当Y1超前Y2时,LED1亮;当Y1滞后Y2时,LED2亮。 3、 相位差与时间差的关系 360 ?= T Δt φ 4、 脉冲电压的平均值与脉宽成正比 T U a dt U T dt u T U H a H T av == = ??0 11 其中:a ——脉宽。T ——脉冲电压周期。U H ——脉冲电压高电平。 5、 磁电系电压表的读数是电压的平均值。 五、实验内容和要求 1、内容和要求
搭出相位差测量电路,并在具体电路上验证,调系数。具体要求:掌握基本的硬件插接技术,布线必须正确、接触良好,其次要求布线合理、清晰、美观。 2、测量数据 构造如图2所示的电路,信号发生器产生频率为100Hz的正弦波,调节RC 参数可以改变Y1(电源电压)与Y2(电阻电压,与回路电流同相位)之间的相 位差,记为 j。Y1和Y2作为相位表的输入信号,用磁电系电压表(或万用表0 测量)测量相位表的输出电压,当输出电压测出后,脉宽a就可以算出来,a算出来后,相位差也就可以算出来,记为 j,比较0j和1j。记录发光二极管(LED) 1 的状态,用以确定两路正弦信号的相位关系(超前/滞后)。 表1 阻抗角测量记录表格 Vcc 图2 用相位表测量阻抗角 3、硬件调试方法 制作硬件时,若输出电压值或LED的状态不正确,需调试硬件电路,找出错误并改正。建议采用以下方法调试硬件: (1)用电压表测量各点电压,或者用示波器观察各点波形。
用虚拟相关法测量两个同频信号的相位差.
虚拟相关法相位差计的设计 摘要 传统测量仪器功能单一,多功能虚拟仪器是现代仪器技术的发展方向。利用Labview设计一种利用虚拟相关法测量相位差计的虚拟仪器,该仪器以测量两个同频正弦波的相位差为基本功能,具备了测量信号频率,显示信号波形、相位差和产生标准信号等功能,体现了虚拟仪器高集成度,一机多用的特点。 本题目属于应用类,设计主要内容利用互相关分析法实现相位差检测,在虚拟仪器设计平台上仿真实现,结合原理和公式进行数据计算分析,充分利用了Labview的性能。 关键词:相关法、相位差,虚拟仪器
目录 虚拟相关法相位差计的设计 (1) 1 引言 (3) 2 相位差测量仪的概述 (3) 2.1 相位差的定义 (3) 2.2 相位差测量仪的应用 (3) 3 Labview软件简介 (4) 3.1 Labview概述 (4) 3.2 Labview的应用 (5) 3.2.1 Labview应用于测试于测量 (5) 3.2.2 Labview应用于实验室研究与自动化 (5) 4 相位差测量方法原理简介 (6) 4.1 相关法相位差测量相位差原理 (6) 5 相位差计设计 (7) 5.1 设计要求 (7) 5.3 Labview平台下软件的实现 (8) 5.4 子模块(VI)设计 (10) 5.5 相位差计设计测试结果 (12) 结论 (16)
参考文献 (17) 1 引言 信号的相位差测量在电工技术,工业自动化,智能控制,通讯及电子技术等许多领域都有着广泛的应用。传统电子模拟式相位差测量采用乘法器法,二极管鉴相法等,需要完成对应的硬件电路。电路的温漂,噪声级干扰信号,都会导致测量结果产生误差。因此,传统的相位差检测方法正逐渐被软件测量方法所替代,通过软件算法来消除温漂、噪声及干扰信号的影响,使测量结果更加精确。 2 相位差测量仪的概述 2.1相位差的定义 相位差:两个频率相同的交流电相位的差叫做相位差,或者叫相差。这两个频率相同的交流电,可以是两个交流电流,可以是两个交流电压,可以是两个交流电动势,也可以是这三种量中的任何两个。 例如研究加在电路上的交流电压和通过这个电路的交流电流的相位差,如果电路是纯电阻,那么交流电压和交流电流的相位差等于零,也就是说交流电压等于零的时候,交流电流也等于零,交流电压达到最大值时,交流电流也将达到最大值。这种情况叫做同相位,或者叫做同相。如果电路含有电感和电容,交流电压和交流电流一般是不等于零的,也就是说一般是不同相的,或者电压超前于电流,或者是电流超前于电压。 加在晶体管放大器基极上的交流电压和从集电极输出的交流电压,这两者的相位差正好等于180?,这种情况叫做反相位,或者叫做反相。 2.2 相位差测量仪的应用 信号的相位差测量仪在电工技术,工业自动化,智能控制,