基于单超声波传感器的移动机器人沿墙导航策略
第15卷第3期2008年6月
工
程设计学报
Journal of E ngineering Design
Vol.15No.3J un.2008
收稿日期:2007211201.
基金项目:南通市应用研究计划项目(K2007023).
作者简介:华 亮(1979—),男,江苏南通人,讲师,硕士,从事移动机器人、电机控制、传感器与测控系统、模式识别等研究,E 2
mail :hualiang @https://www.360docs.net/doc/727700749.html,.
DOI :10.3785/j.issn.10062754X.2008.03.011
基于单超声波传感器的移动机器人沿墙导航策略
华 亮1,2,冯 浩2,顾菊平1,张建生3
(1.南通大学电气工程学院,江苏南通226019;2.浙江工业大学智能信息研究所,浙江杭州310032;
3.常州工学院电子信息与电气工程学院,江苏常州213002)
摘 要:对基于单超声波传感器的移动机器人沿墙导航中的关键问题进行理论和实验研究,在几何分析的基础上提出并解决了采用单超声波传感器进行沿墙导航时的约束问题.此外,还提出一种自调整沿墙导航策略,该方法采用旋转式单超声波传感器实现了移动机器人精确的沿墙导航.经实验验证,提出的方法简便有效、可靠性高,具有普遍的应用意义和较高的应用价值.
关键词:移动机器人;超声波传感器;沿墙导航策略;几何分析
中图分类号:TP273 文献标识码:A 文章编号:10062754X (2008)0320206207
W all following navigation strategy for mobile robot using single ultrasonic sensor
HUA Liang 1,2,FEN G Hao 2,GU J u 2ping 1,ZHAN G Jian 2sheng 3
(1.School of Electrical Engineering ,Nantong University ,Nantong 226019,China ;2.Research Institute of Intelligent
Information System ,Zhejiang University of Technology ,Hangzhou 310014,China ;3.School of Electronic Information &Electric Engineering ,Changzhou Institute of Technology ,Changzhou 213002,China )
Abstract :Theoretical and experimental research o n t he existing key problems in wall 2follwing st rategies using single ult rasonic sensor was carried out.On t he basis of geometric analysis ,t he const raint p roblem of wall 2following navigation using single ult rasonic sensor was p roposed and t hen sloved.Furt hermore ,a self 2adjusting wall 2following using single rotary ult rasonic sensor to implement p recise wall 2following navigation of mobile robot was p ut forward.Testified by exper 2iment s ,t he p ropo sed met hod is effective ,convenient and highly reliable.And it has general ap 2plication significance and wide application pro spect.
K ey w ords :mobile robot ;ult rasonic sensor ;wall 2following strategy ;geomet ry analysis
“沿墙导航”行为就是让机器人沿着某个物体的边沿行走,当物体边沿形状发生变化或路径中出现障碍物时,移动机器人能够自主对环境信息进行判断处理,保持“沿墙走”行为.研究此基本行为的目的[1]是研究机器人探索环境、适应环境的能力.它可以看作是移动机器人智能的低层行为,当它与其它高层的智能行为结合时,可以完成复杂的任务.
很多场合要求机器人具有沿墙导航能力,如沿障碍物轮廓避障、未知环境导航、环境建模及机器人定位等.在实用领域,室内保洁机器人多数具有沿墙
走功能.沿墙走模式也是工业用A GV 引导方式之一.在国际机器人灭火比赛中,沿墙走模式也是使用最多的一种方法.
国内外很多学者对沿墙走导航进行了研究.在传感器的选用上,多采用超声波传感器[122]、接触式传感器[3]和红外传感器等[4].在控制方法上,P.Turennout [5]及A.Bemporad [6]等基于移动机器人
的数学模型实现沿墙导航控制,但其仅给出了沿直线型墙行走的实验结果;M. B.Holder [7]等提出了一个基于单个旋转声纳传感器的沿墙导航算法,该
方法实时性较差;A.Y oshinobu[8]等则利用一个声纳环实现移动机器人在复杂室内环境的沿墙运动;
F.Deschenes等人[9]建立了机器人沿墙导航的近似数学模型;王栋耀[1]等人采用有限状态机控制方法对机器人沿墙导航进行了仿真研究;简伟程等人对遗传规划算法在沿墙导航中的应用进行了研究[10];此外,还有模糊控制方法[11]、PI算法[12]、Bang2Bang控制方法[13]等.以上各种控制策略各有特点,但大多存在算法、硬件结构复杂,可靠性差等缺点,不利于推广实用.如PI控制算法虽然简单,但具有较大的静差和振荡,系数难以调节;模糊控制响应速度快,无需数学模型但要求有较多的运行经验;遗传规划算法具有在线辨识、实时调整误差的特点,但计算量大.且现有的方法基本都采用多超声波传感器以克服单传感器指向性差的缺点,以提高沿墙导航精度,但采用多超声波传感器具有以下缺点[14216]:存在串扰信号问题,放大倍数和驱动功率的增加将使传感器离散性更加突出,串扰信号影响更严重;多传感器安装复杂,安装精度影响测量精度;多传感器测控电路较为复杂,数据融合算法也复杂.基于此现状,本文研究了一种简单可靠的基于单超声波传感器的沿墙导航控制方法.
1 超声波传感器测距分析
本文采用杭州科纳传感器件有限公司销售的一体式超声波传感器TC T40210检测小车与墙面的距离.传感器使用40k Hz发射频率及选频接收频率.在沿墙走模式中,传感器波束中轴方向与墙面多数情况下是不垂直的,因此必须分析角度变化对测距的影响.
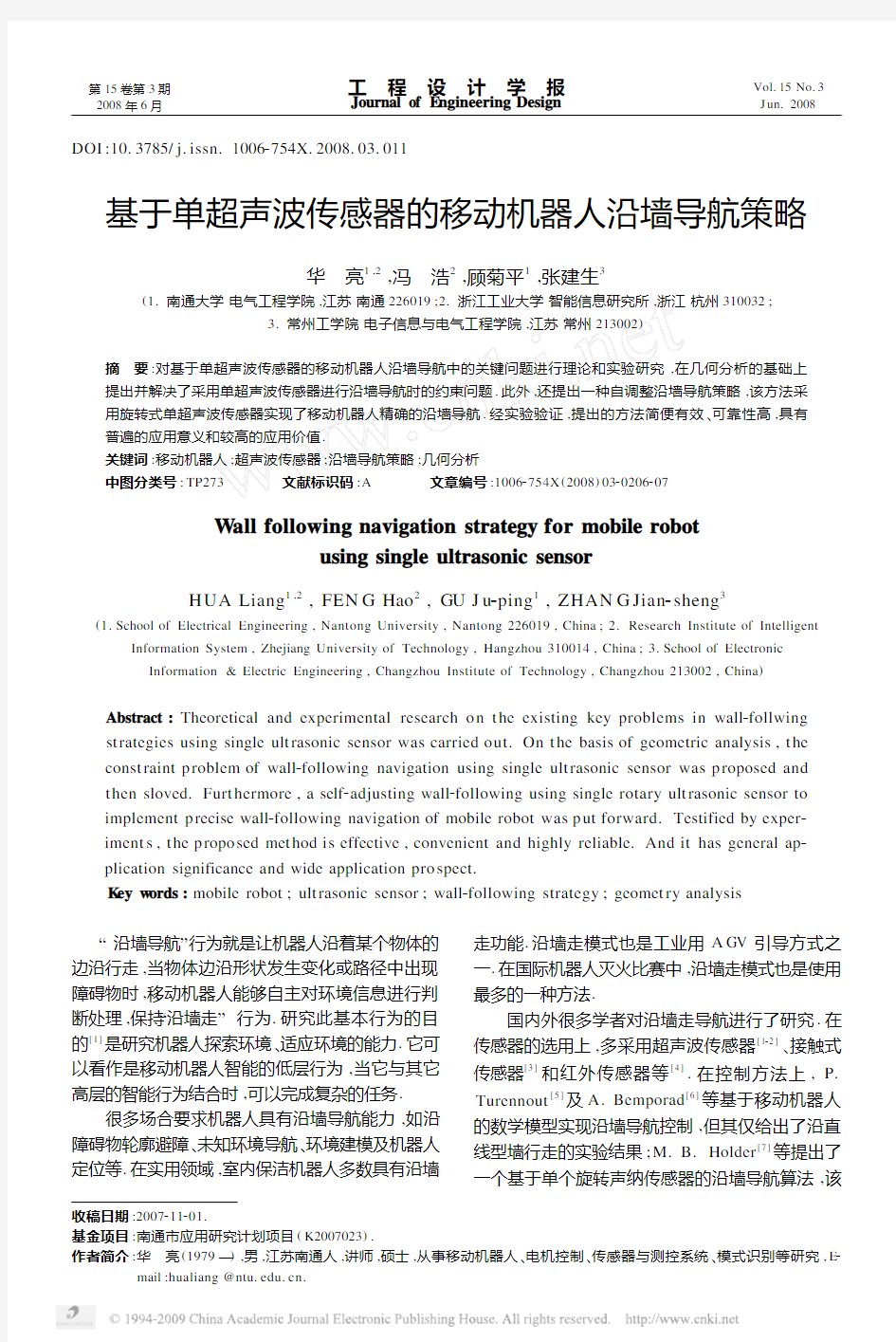
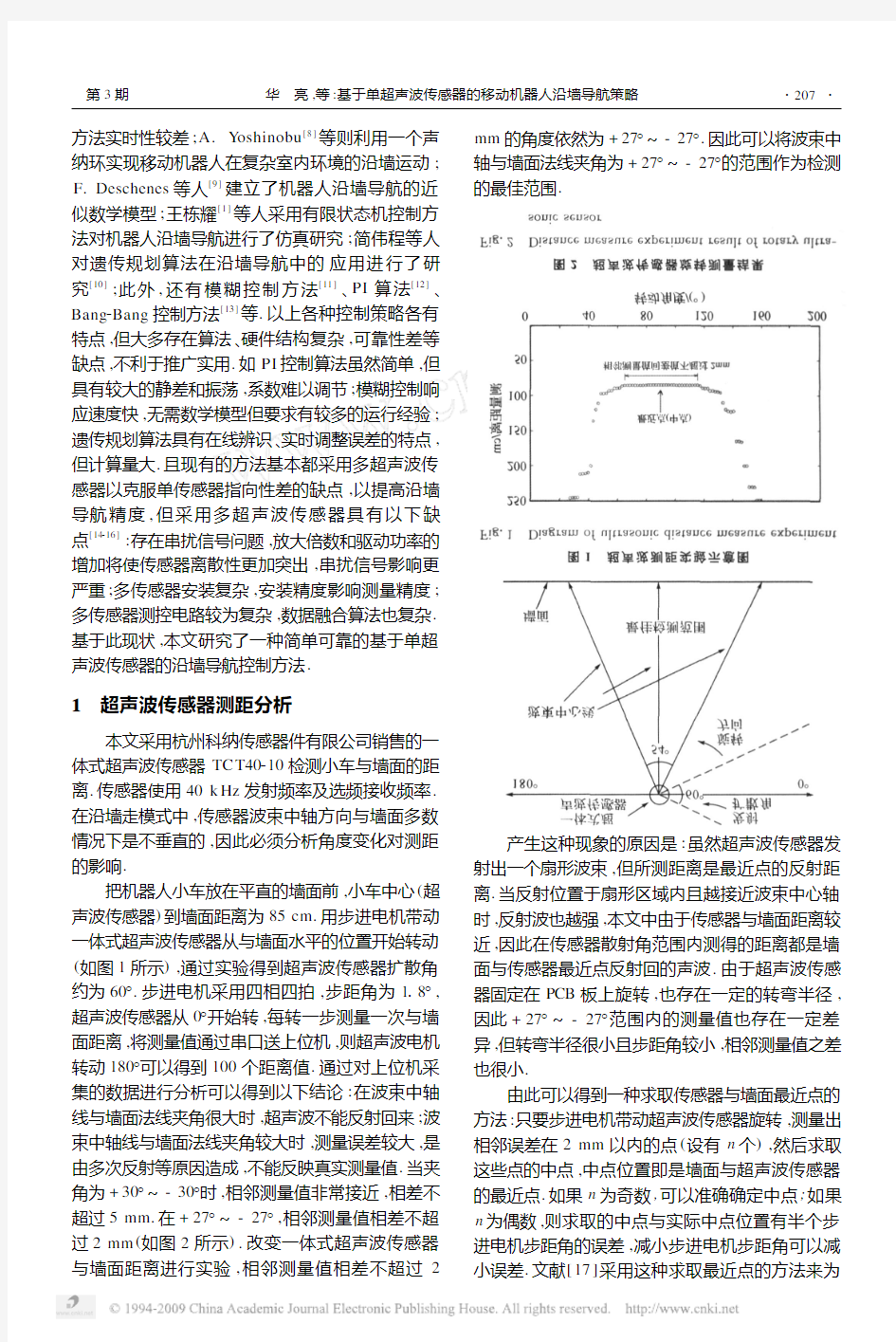
把机器人小车放在平直的墙面前,小车中心(超声波传感器)到墙面距离为85cm.用步进电机带动一体式超声波传感器从与墙面水平的位置开始转动(如图1所示),通过实验得到超声波传感器扩散角约为60°.步进电机采用四相四拍,步距角为118°,超声波传感器从0°开始转,每转一步测量一次与墙面距离,将测量值通过串口送上位机,则超声波电机转动180°可以得到100个距离值.通过对上位机采集的数据进行分析可以得到以下结论:在波束中轴线与墙面法线夹角很大时,超声波不能反射回来;波束中轴线与墙面法线夹角较大时,测量误差较大,是由多次反射等原因造成,不能反映真实测量值.当夹角为+30°~-30°时,相邻测量值非常接近,相差不超过5mm.在+27°~-27°,相邻测量值相差不超过2mm(如图2所示).改变一体式超声波传感器与墙面距离进行实验,相邻测量值相差不超过2mm的角度依然为+27°~-27°.因此可以将波束中轴与墙面法线夹角为+27°~-27°的范围作为检测的最佳范围
.
产生这种现象的原因是:虽然超声波传感器发射出一个扇形波束,但所测距离是最近点的反射距离.当反射位置于扇形区域内且越接近波束中心轴时,反射波也越强,本文中由于传感器与墙面距离较近,因此在传感器散射角范围内测得的距离都是墙面与传感器最近点反射回的声波.由于超声波传感器固定在PCB板上旋转,也存在一定的转弯半径,因此+27°~-27°范围内的测量值也存在一定差异,但转弯半径很小且步距角较小,相邻测量值之差也很小.
由此可以得到一种求取传感器与墙面最近点的方法:只要步进电机带动超声波传感器旋转,测量出相邻误差在2mm以内的点(设有n个),然后求取这些点的中点,中点位置即是墙面与超声波传感器的最近点.如果n为奇数,可以准确确定中点;如果n为偶数,则求取的中点与实际中点位置有半个步进电机步距角的误差,减小步进电机步距角可以减小误差.文献[17]采用这种求取最近点的方法来为
?
7
2
?
第3期 华 亮,等:基于单超声波传感器的移动机器人沿墙导航策略
移动机器人建立环境地图;文献[18]采用此方法使
小车保持与墙面平行,但小车会偏离原来的轨道.
2 接近式沿墙导航策略
作者自行研制的三轮移动机器人采用双轮差动转向方式,虽然两驱动轮用减速直流电机在相同PWM 调速电压占空比下速度相差不大,但如不加控制,较长时间后会引起小车与墙面相对位置的逐渐偏移.因此应当采取适当策略检测小车与墙面距离以控制小车位姿.实验中让机器人沿较平直的走廊墙面行走,采用一体式超声波传感器检测墙面与小车的距离.小车在走廊中沿墙前进,超声波传感器安装在小车重心处,保持超声波传感器与墙面距离85cm (期望值).机器人尺寸如图3所示:车宽35cm ,超声波传感器至小车边沿距离1715cm ,小车长
度50cm.保持一体式超声波传感器波束中轴与小
车速度方向垂直
.
图3 沿墙导航示意图
Fig.3 Wall 2following schematic diagram
采用接近式控制策略,维持墙壁和传感器之间
的距离为一固定常数.当两者距离偏小时,机器人向远离墙壁的方向旋转;当距离偏大时,向墙壁方向旋转.小车旋转采用差动方式,旋转时维持小车的转弯半径不变,采用该方式控制简单,路径平滑.在旋转时采用差速法:当机器人需要远离墙壁时,使靠近墙壁的驱动速度为v 1,另一侧驱动轮速度为v 2,v 1>v 2;当需要靠近墙壁时,两轮速度值反过来.如图4所示,小车理想行进路线是一段段等半径的圆弧
.
图4 接近式沿墙走策略
Fig.4 Approaching wall 2following strategy
小车的行进路线与超声波传感器的采样频率、
两轮差速有关.在一体式超声波传感器采样频率足
够高时,两轮差速越大,转弯半径R 越小,小车超调越小,但两轮差速过大容易造成微幅振荡;反之,两轮速度差越小,小车运行线路平滑,但超调越大.如两轮速度差过小,转弯半径R 过大,小车和墙面会有碰撞危险.
在实验中,使超声波传感器始终保持与车体速度方向垂直.在上述实验中得到,波束中心线偏离墙面垂线不超过±27°.当然,超过27°仍能够测出距离值,但偏移过大容易测得多次反射后的错误信号或者根本检测不到回波信号,使小车失控.实验中步进电机步距角为1.8°,如减小步距角,得到的稳定角
度θ必定为27°≤θ≤2818°.因此在控制中,将小车
与墙面夹角不超过±27°作为不失控的前提条件.且由于墙面的对称性,步距角的改变不会影响最近点的测量.
所以在采用单超声波传感器进行接近式沿墙导航时,必须合理选择v 1,v 2的大小,使小车避免两种状态:碰撞和失控,并在此基础上减小小车的微幅振荡.同时小车的初始位姿对于控制也至关重要,初始位置太靠近墙壁或者初始姿态与墙壁夹角太小,会产生碰撞和失控危险.该系统是一个较复杂的多约束问题系统.下面来考虑小车既不失控又不碰撞情况下,对两驱动轮速度及超声波传感器采样时间的约束条件.
2.1 碰撞时的极限位置
在分析时,认为小车车身是长方形.差速转向时,车身每一点都在作圆周运动.小车如果和墙壁发生碰撞,则最先碰撞位置必定是车身前沿的两个顶角,如图5所示
.
图5 移动机器人运行时的极限位置
Fig.5 Extreme position of mobile robot
2.2 小车旋转角度分析
仅仅是不碰墙还是不够的,还必须不失控.由于超声波传感器位置固定,则超声波传感器旋转角度就是小车旋转角度,因此要求小车相对墙面旋转角
?802?工 程 设 计 学 报 第15卷
度不超过±27°,根据小车运动学模型[19]可以得到偏向角:
α=(ω1-ω2)
rt 2
πL ×360°=
v 1-v 2t
2π×0275×360°≤27°]
v 1-v 2t ≤0.13,
(1)
式中:r 为左右两驱动轮半径;L 为两驱动轮的轮间
距;ω1,ω2为左、
右两轮角速度;v 1,v 2为左、右两轮线速度.这是一个对两驱动轮差速的约束条件,但其中含有变量t ,也即小车在时间t 内,偏移角度不能超过27°,如图6所示,其中R 为小车转弯半径.小车的运行轨迹是一条条的弧线,可以看成是一个
个相切的圆的一部分,假设超声波传感器的采样频率足够高,则小车左右两轮调换控制速度的时刻就在图示拐点处,这也是两圆的切点.由图6可见,只要在拐点处小车的偏移角α≤27°,小车就不会失控.而在拐点处的时刻t 就是小车不失控情况下的时间的最大值.
图
6 机器人运行时间与旋转角度的关系
Fig.6 Relation between running time and rotation an 2
gel of mobile robot
2.3 角度信息与碰撞信息的综合分析
下面通过几何方法来分析小车不失控、不碰撞时的约束条件.
图7 机器人运行局部轨迹示意图
Fig.7 Partial running trace of mobile robot
如图7所示,假设超声波传感器采样频率足够高,在85cm 处小车驱动轮状态改变时,在相同转弯
角度α(α≤27°
)下的小车运行轨迹是内切圆系,切点距离墙面都是85cm ,如图中圆1,2,3所示.当两轮差速变小,转弯半径逐渐增大,极限位置是圆4所在位置,圆4的半径就是在α下的最大转弯半径,设为R α,圆4的圆心在直线5上,且与直线6和墙面相切.当转弯半径为R α时,是小车与墙面碰撞的临界点.随着α的变小,对应的最大转弯半径在变大,且轨迹的圆心都在直线5的左侧.当α=0°时,最大转弯半径是∞,即小车与墙面平行运行.因此,0≤α≤27°时,在α=27°时的最大转弯半径为最小.
因此在不知道α(0≤α≤27°
)大小时,只要保证所有转弯半径都比α=27°时的最大转弯半径R 27小,就能保证小车的偏移角度α∈[0°,27°]且不与墙壁碰撞.可得如下约束关系:
R (2) 而从图5可见,为不使小车碰撞,应考虑小车顶点的转弯半径R max .由双轮差动小车运动学模型[19] 得到转弯时内轮的半径为:R =ω2 ω1-ω2 L = v 2 v 1-v 2 0.275(其中v 2为转弯时内轮速度,v 1为转弯时的外轮速度),由本文研制的小车尺寸[20]结合图中几何关系得到: R max = P 2 +Q 2 = {0.308+[v 2/(v 1-v 2)]×0.275}2+0.422 . (3) 由图7根据几何关系得到α=27°时的最大转 弯半径为: R 27-R 27co s 27°=0.85]R 27=7.798m .(4)将式(3)和式(4)代入式(2),得 0≤{0.308+[v 2/(v 1-v 2)]×0.275}2+0.422≤ 7.798]v 2/v 1≤0.966. (5) 这就是小车在稳定行进过程中,偏移角度α∈[0°,27°]且不与墙碰撞的速度约束条件,但这种约束的前提条件是超声波传感器采样频率足够高,且要受到小车初始位姿制约.由于是差速调向,还必须满足v 2/v 1>0.2.4 初始位姿约束条件 由以上理论分析可见,只要小车由初始位姿第1次经过85cm 线的角度不超过27°就可以(转弯圆心在图7的直线5左侧).而在实际中由于超声波传感器采样频率不可能无限高,不可能在小车刚刚通过85cm 线时采样到,因此应使小车第1次经过85cm 线时的角度小些,以给出一定的裕量,以后小车就可以在式(5)的约束条件下任意选择转动速度. ? 902? 第3期 华 亮,等:基于单超声波传感器的移动机器人沿墙导航策略 实际操作中可以开始让小车双轮电机以相同的PWM占空比运行,由于两轮差速很小,第1次经过85cm线时角度小于27°,然后就可以启动接近式沿墙走方法.在确定了两轮差速的情况下,小车第1次经过85cm线时的角度越小,小车跑得越直;反之,轨迹较平缓,但超调越大. 2.5 传感器采样时间约束条件 在以上分析中假设传感器采样频率足够大,而实际上要测得85cm的距离,理论最小采样时间t= (0.85×2)/344=0.004941s=4.941ms(344m/s 为超声波声速).采样时间越大,小车越可能出现失控或碰撞,因此按式(5)选择速度时可以适当减小差速,以留有一定裕量,但差速太小会引起过大超调. 2.6 移动机器人速度约束条件 双轮差动小车速度可表示为:v=(v1+ v2)/2,当小车速度较大时,相当于降低了传感器采样频率,如采样时刻偏离基准线太远,小车同样会失控.如小车速度较快,可通过增加超声波传感器采样频率并减小双轮差速的方法来解决.但由于超声波波速限制,采样频率不可能过高.且超声波具有发散性,如采样频率太高,在复杂环境中系统可能接收到墙面之外其它物体反射回来的尚未衰减完全的余波,造成系统误判.因此超声波传感器并不适用于小车速度很快时的沿墙导航,在此情况下可考虑采用红外或激光导航方式. 在实验中,作者通过DSP定时器控制超声波传感器采样时间为20ms(发射间隔时间+超声波在空气中传播时间),由于小车速度较慢,传感器的采样时刻总在85cm线附近,当差速和初始位姿留有裕量时,必定不会发生碰撞和失控危险. 3 自调整沿墙导航策略 本文将文献[18]所提出的寻找最近点的方法应用到沿墙导航中,通过步进电机与超声波传感器的组合可实现小车姿态的自调整,实现较精确的沿墙导航.本文采用该方法时在机器人前方加装了一个分立反射式超声波传感器,感测前方障碍物与小车距离.自调整沿墙导航示意图如图8所示.导航策略如下:(1)确定沿左墙走还是沿右墙走.(2)初始时保持超声波传感器与小车前进方向垂直.(3)当超声波传感器检测到小车到墙面距离与设定值不一致时,搜索传感器到墙面最近点.(4)计算小车偏离直线轨迹的距离.(5)使小车自动调整到初始时的位姿. 程序流程图如图9, 最近点检测及偏移角度计算子程序如图10所示.在调整中首先必须确定沿左墙走还是沿右墙走,以确定超声波传感器的初始方 ? 1 2 ?工 程 设 计 学 报 第15卷 图10 最近点搜索及偏移角度计算子程序 Fig.10 Program flow graph of nearest point search and off set angle calculation 向和旋转方向.并且通过测量距离与设定距离的大小,来确定超声波传感器旋转方向和小车旋转方向.自调整策略有不少优点:(1)可用于精确沿墙走.虽然在该方法中超声波传感器旋转、机器人小车旋转定位都需要一定时间,导航速度较慢,但由于电机双轮差速小,可降低超声波传感器采样时间,小车每行走一段时间后调整一次.在双轮差速很小情况下,甚至可以不用超声波传感器检测,隔一段时间自动调整一次.(2)此方法对小车位姿要求更宽松.如果超声波传感器波束轴线方向与小车速度方向垂直,其根据稳定检测条件,小车与墙面夹角最大可达180°-27°=153°.如果只有一面平直的墙,则采用超声波传感器旋转360°的方法,可对小车任何位姿进行自调整.(3)可以和接近式导航沿墙配合使用.接近式导航对小车初始位姿有约束条件,而采用自回归方法对初始位姿要求宽松.且小车以两驱动轮轴心为圆点转动,允许小车离墙更近.(4)机器人前进过程中受到撞击或干扰后,可自动回归初始位姿. 4 结 论 本文对基于单超声波传感器的移动机器人沿墙导航中的关键问题进行了理论和实验研究,在几何分析方法的基础上提出并解决了基于单超声波传感器的移动机器人沿墙导航中的约束问题,并经实验验证了该方法的有效性.此外,本文还提出了一种自调整沿墙导航策略,该方法采用旋转式单超声波传感器实现了移动机器人精确的沿墙导航.本文提出的方法结构简单、可靠性高、成本低,具有普遍的应用意义和较高的应用价值. 参考文献: [1]王栋耀,马旭东,戴先中.基于声纳的移动机器人沿墙导 航控制[J].机器人,2004,26(4):3462350. WAN G Dong2yao,MA Xu2dong,DA I Xian2zhong.Wall following navigation control for a sonar2based mobile ro2 bot[J].Robot,2004,26(4):3462350. [2]BORENSTEIN J,KERON Y.The vector filed histo2 gram2fast obstacle avoidance for mobile robots[J].IEEE Transactions on Robotics and Automation,1991,7(3): 2782288. [3]谷 安,谢清华.机器人触须传感器的设计[J].传感器与 微系统,2006,25(6):83288. GU An,XIE Qing2hua.Design of robot whisker sensors [J].Transducer and Microsystem Technologies,2006, 25(6):83288. [4]刘章琼,何永义.基于PSoC的智能吸尘机器人控制系统 的设计[J].工业仪表与自动化装置,2005,12(4):70272. L IU Zhang2qiong,H E Y ong2yi.The design of an intelli2 gent cleaning robot control system based on a program2 mable system on chip[J].Industrial Instrumentation& Automation,2005,12(4):70272 [5]TU RENNOU T P,HONDERD G,SCH EL V EN L. Wall2following control of a mibile robot[C]//Proceed2 ings of the1992IEEE International Conference on Ro2 botics and Automation.Nice,France,1992:2802285. [6]B EMPORAD A,MARCO M D,TESI A.Wall2follow2 ing controllers for sonar based mobile robots[C]//Pro2 ceedings of the36th Conference on Decision&Control. San Diego,USA,1997:306323068. [7]H HLDER M B,TRIV EDI M M,MARA PANS S B. Mobile robot navigation by wall following using a rota2 ting ultrasonic scanner[C]//Proceedings of the13th In2 ternational Conference on Pattern Recognition.Vienna, Austria,1996:2982302. [8]Y OSHINOBU A,SHIπICHI Y.Following a wall by an au2 ? 1 1 2 ? 第3期 华 亮,等:基于单超声波传感器的移动机器人沿墙导航策略 tonomous mobile robot with a sonar ring[C]//Proceedings of the1995IEEE International Conference on Robotics and Automation.Nagoya,Japan,1995:259922606. [9]DESCH EN ES F,ZIOU D,FUCHS P.Improved estima2 tion of defocus blur and spatial shifts in spatial domain:a homotopy2based approach[J].Pattern Recognition,2003, 36(9):210522125. [10]简伟程.移动机器人自主行为设计的演化方法研究[D]. 上海:上海交通大学电子信息与电气工程学院,2002. J IAN Wei2cheng.Research on evolutionary method of mobile robotπs autonomous behavior design[D].Shang2 hai:Shanghai Jiaotong University,School of Electron2 ic,Information and Electrical Engineering,2002. [11]刘喜昂.智能移动机器人的超声避障系统研究[D].杭 州:浙江理工大学信息电子学院,2003. L IU Xi2ang.Research on obstacle avoidance of intelli2 gent mobile robot using ultrasonic sensors[D].Hang2 zhou:Zhejiang Sci2Tech University,Faculty of Infor2 matics&Electronics,2003. [12]原 魁.机器人编程技术:基于行为的机器人实战指南 [M].北京:机械工业出版社,2006. YUAN Kui.Programming technology of robot:practi2 cal studies of robot based on behavior[M].Beijing: China Machine Press,2006. [13]张 飞,陈卫东.具有声纳环的移动机器人及其自主行 为研究[J].测控技术,2003,22(6):529. ZHAN G Fei,CH EN Wei2dong.A mobile robot with sonar ring and its autonomous behaviors[J].Measure2 ment&Control Technology,2003,22(6):529. [14]龚华锋.智能吸尘机器人多传感器信息融合研究[D]. 杭州:浙江大学机械与能源工程学院,2004. GON G Hua2feng.Research on multi2sensor data fusion of autonomous intellectual cleaning robot[D].Hang2 zhou:Zhejiang University,College of Mechanical and Energy Engineering,2004.[15]黄晓瑞,崔平远,崔枯涛.多传感器信息融合技术及其在 组合导航系统中的应用[J].高技术通讯,2002,12(2): 1072110. HUAN G Xiao2rui,CU I Ping2yuan,CU I Ku2tao. Multi2sensor information f usion technique and its appli2 cation in integrated navigation system[J].High Tech2 nology Letters,2002,12(2):1072110. [16]曾德怀,谢存禧,张 铁,等.行走机器人的超声波测距系 统的研究[J].机械科学与技术,2004,23(5):6132616. ZEN G De2huai,XIE Cun2xi,ZHAN G Tie,et al.Research of ultrasonic ranging system for movement robot[J].Me2 chanical Science and T echnology,2004,23(5):6132616. [17]CHOSET H,NA GA TAN I K,L AZAR N.The arc2 transversal median algorithm:a geometric approach to increasing ultrasonic sensor azimuth accuracy[J].IEEE Transactions on Robotics and Automation,2003,19(3): 6442651. [18]顾高至.智慧型多功能自走车之研发[D].台湾省:国立 成功大学工程科学系,2004. GU Gao2zhi.The development of an intelligent and ver2 satile automatic mobile vehicle[D].Taiwan:National Cheng Kung University,Department of Engineering Science,2004. [19]李保国,宗光华.双轮移动机器人运动目标追踪与避障 控制算法[J].航空学报,2007,28(2):4452450. L I Bao2guo,ZON G Guang2hua.Moving2target tracking and obstacle avoidance control algorithm for unicycle mobile robots[J].Journal of Astronautics,2007,28 (2):4452450. [20]华 亮.多功能移动机器人运动机构及控制系统的研究 与实现[D].杭州:浙江工业大学信息工程学院,2006. HUA Liang.Research and implementation of movement mechanism and control system of mobile robot[D]. Hangzhou:Zhejiang University of Technology,College of Information Engineering,2006. (上接第190页) [4]ZHU L I2Min,DIN G Y e,DIN G Han.Algorithm for spatial straightness evaluation using therories of linear complex che2 byshev approximation and semi2infinite linear programming [J].T ransaction of the ASME:Journal of Manufacturing Science and Engineering,2006,128(2):1672174. [5]李淑娟,刘云霞.基于坐标变换原理的最小区域法评定 空间直线度误差[J].计测技术,2006,26(1):24225. L I Shu2juan,L IU Yun2xia.A method for minimum zone evaluation of space linearity error based on principle of coordinate transformation[J].Metrology&Measure2 ment Technology,2006,26(1):24225. [6]廖 平,喻寿益.基于遗传算法的空间直线度误差的求解 [J].中南工业大学学报,1998,29(6):5862588. L IAO Ping,YU Shou2yi.A method of calculating32D line error using genetic algorithms[J].Journal of Central South University of Technology,1998,29(6):5862588. [7]茅 健,曹衍龙.基于粒子群算法的空问直线度误差评 定[J].工程设计学报,2006,13(5):2912294. MAO Jian,CAO Y an2lon.Evaluation method for spatial straightness errors based on particle swarm optimization[J]. Journal of Engineering Design,2006,13(5):2912294. [8]张 青,范光照,徐振高.按最小条件评定空间直线度误 差的理论研究[J].计量学报,1998,19(4):2462253. ZHAN G Qing,FAN Guang2zhao,XU Zheng2gao.Theo2 ry research for spatial straightness error evaluation based on minimum zone condition[J].Acta Metrologica Sinica, 1998,19(4):2462253. ? 2 1 2 ?工 程 设 计 学 报 第15卷 移动机器人的关键技术分为以下三种: (1)导航技术 导航技术是移动机器人的一项核心技术之一[3,4]"它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动"目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等"其中,视觉导航15一7]通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航"它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向,而基于非结构化环境视觉导航是移动机器人导航的研究重点。 (2)多传感器信息融合技术多传感器信息融合技术是移动机器人的关键技术之一,其研究始于20世纪80年代18,9]"信息融合是指将多个传感器所提供的环境信息进行集成处理,形成对外部环境的统一表示"它融合了信息的互补性,信息的冗余性,信息的实时性和信息的低成本性"因而能比较完整地,精确地反映环境特征,从而做出正确的判断和决策,保证了机器人系统快速性,准确性和稳定性"目前移动机器人的多传感器融合技术的研究方法主要有:加权平均法,卡尔曼滤波,贝叶斯估计,D-S证据理论推理,产生规则,模糊逻辑,人工神经网络等"例如文献[10]介绍了名为Xavier的机器人,在机器人上装有多种传感器,如激光探测器!声纳、车轮编码器和彩色摄像机等,该机器人具有很高的自主导航能力。 (3)机器人控制器作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一"目前,国内外机器人小车的控制系统的核心处理器,己经由MCS-51、80C196等8位、16位微控制器为主,逐渐演变为DSP、高性能32位微控制器为核心构成"由于模块化系统具有良好的前景,开发具有开放式结构的模块化、标准化机器人控制器也成为当前机器人控制器的一个研究热点"近几年,日本!美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构!网络功能的机器人控制器"我国863计划智能机器人主题也已对这方面的研究立项 视觉导航技术分类 机器人视觉被认为是机器人重要的感觉能力,机器人视觉系统正如人的眼睛一样,是机器人感知局部环境的重要“器官”,同时依此感知的环境信息实现对机器人的导航。机器人视觉信息主要指二维彩色CCD摄像机信息,在有些系统中还包括三维激光雷达采集的信息。视觉信息能否正确、实时地处理直接关系到机器人行驶速度、路径跟踪以及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性的作用。视觉信息处理技术是移动机器人研究中最为关键的技术之一。 机器人上用的传感器的介绍 作者:Ricky 文章来源:https://www.360docs.net/doc/727700749.html,更新时间:2006年05月20日打印此文浏览数:18549 感知系统是机器人能够实现自主化的必须部分。这一章,将介绍一下移动机器人中所采用的传感器以及如何从传感器系统中采集所需要的信号。 根据传感器的作用分,一般传感器分为: 内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。 外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。 根据传感器的运行方式,可以分为: 被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。 主动式传感器:传感器会发出探测信号。比如超声波,红外,激光。但是此类传感器的反射信号会受到很多物质的影响,从而影响准确的信号获得。同时,信号还狠容易受到干扰,比如相邻两个机器人都发出超声波,这些信号就会产生干扰。 传感器一般有以下几个指标: 动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB. 如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。 分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。 线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。 频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。 下面介绍一下常用的传感器: 编码器:主要用于测量电机的旋转角度和速度。任何用电机的地方,都可以用编码器来作为传感器来获得电机的输出。 A Matlab-based Simulator for Autonomous Mobile Robots Abstract Matlab is a powerful software development tool and can dramatically reduce the programming workload during the period of algorithm development and theory research. Unfortunately, most of commercial robot simulators do not support Matlab. This paper presents a Matlab-based simulator for algorithm development of 2D indoor robot navigation. It provides a simple user interface for constructing robot models and indoor environment models, including visual observations for the algorithms to be tested. Experimental results are presented to show the feasibility and performance of the proposed simulator. Keywords: Mobile robot, Navigation, Simulator, Matlab 1. Introduction Navigation is the essential ability that a mobile robot. During the development of new navigation algorithms, it is necessary to test them in simulated robots and environments before the testing on real robots and the real world. This is because (i) the prices of robots are expansive; (ii) the untested algorithm may damage the robot during the experiment; (iii) difficulties on the construction and alternation of system models under noise background; (iv) the transient state is difficult to track precisely; and (v) the measurements to the external beacons are hidden during the experiment, but this information is often helpful for debugging and updating the algorithms. The software simulator could be a good solution for these problems. A good simulator could provide many different environments to help the researchers to find out problems in their algorithms in different kinds of mobile robots. In order to solve the problems listed above, this simulator is supposed to be able to monitor system states closely. It also should have flexible and friendly users’ interface to develop all kinds of algorithms. Up to now, many commercial simulators with good performance have been developed. For instance, MOBOTSIM is a 2D simulator for windows, which provides a graphic interface to build environments [1]. But it only supports limited robot models (differential driven robots with distance sensors only), and is unable to deal with on visual based algorithms. Bugworks is a very simple simulator providing drag-and-place interface [2]; but it provides very primitive functions and is more like a demonstration rather than a simulator. Some other robot simulators, such as Ropsim [3], ThreeDimSim [5], and RPG Kinematix [6], are not specially designed for the development of autonomous navigation algorithms of mobile robots and have very limited functions. Among all the commercial simulators, Webot from Cyberbotics [4] and MRS from Microsoft are powerful and better performed simulators for mobile robot navigation. Both simulators, i.e. Webots and MRS, provide powerful interfaces to build mobile robots and environments, excellent 3-D display, accurate performance simulation, and programming languages for robot control. Perhaps due to the powerful functions, they are difficult to use for a new user. For instance, it is quite a boring job to build an environment for visual utilities, which involves shapes building, materials selection, and illumination design. Moreover, some robot development kits have built-in simulator for some special kinds of robots. Aria from Activmedia has a 2-D indoor simulator for Pioneer mobile robots [8]. The simulator adopts feasible text files to configure the environment, but only support limited robot models. However, the majority of commercial simulators are not currently supporting On the other hand, Matlab 移动机器人视觉导航。 0504311 19 刘天庆一、引言 智能自主移动机器人系统能够通过传感器感知外界环境和自身状态,实现在有障碍物环境中面向目标的自主运动,从而完成一定作业功能。其本身能够认识工作环境和工作对象,能够根据人给予的指令和“自身”认识外界来独立地工作,能够利用操作机构和移动机构完成复杂的操作任务。因此,要使智能移动机器人具有特定智能,其首先就须具有多种感知功能,进而进行复杂的逻辑推理、规划和决策,在作业环境中自主行动。机器人在行走过程中通常会碰到并且要解决如下三个问题:(1)我(机器人)现在何处?(2)我要往何处走?(3)我要如何到达该处?其中第一个问题是其导航系统中的定位及其跟踪问题,第二、三个是导航系统的路径规划问题。移动机器人导航与定位技术的任务就是解决上面的三个问题。移动机器人通过传感器感知环境和自身状态,进而实现在有障碍物的环境中面向目标自主运动,这就是通常所说的智能自主移动机器人的导航技术。而定位则是确定移动机器人在工作环境中相对于全局坐标的位置及其本身的姿态,是移动机器人导航的基本环节。 目前,应用于自主移动机器人的导航定位技术有很多,归纳起来主要有:安装CCD 摄像头的视觉导航定位、光反射导航定位、全球定位系统GPS(Global Positioning System)、声音导航定位以及电磁导航定位等。下面分别对这几种方法进行简单介绍和分析。 1、视觉导航定位 在视觉导航定位系统中,目前国内外应用较多的是基于局部视觉的在机器人中安装车载摄像机的导航方式。在这种导航方式中,控制设备和传感装置装载在机器人车体上,图像识别、路径规划等高层决策都由车载控制计算机完成。视觉导航定位系统主要包括:摄像机(或CCD 图像传感器)、视频信号数字化设备、基于DSP 的快速信号处理器、计算机及其外设等。现在有很多机器人系统采用CCD 图像传感器,其基本元件是一行硅成像元素,在一个衬底上配置光敏元件和电荷转移器件,通过电荷的依次转移,将多个象素的视频信号分时、顺序地取出来,如面阵CCD传感器采集的图像的分辨率可以从32×32 到1024×1024 像素等。视觉导航定位系统的工作原理简单说来就是对机器人周边的环境进行光学处理,先用摄像头进行图像信息采集,将采集的信息进行压缩,然后将它反馈到一个由神经网络和统计学方法构成的学习子系统,再由学习子系统将采集到的图像信息和机器人的实际位置联系起来,完成机器人的自主导航定位功能。 视觉导航定位中,图像处理计算量大,计算机实时处理的速度要达到576MOPS~5.76BOPS,这样的运算速度在一般计算机上难以实现,因此实时性差这一瓶颈问题有待解决; 另外,对于要求在黑暗环境中作业的机器人来说,这种导航定位方式因为受光线条件限制也不太适应。 当今国内外广泛研制的竞赛足球机器人通常都采用上面所说的视觉导航定位方式,在机器人小车子系统中安装摄像头,配置图像采集板等硬件设备和图像处理软件等组成机器人视觉系统。通过这个视觉系统,足球机器人就可以实现对球的监测,机器人自身的定位,作出相应动作和预测球的走向等功能 基于行为设计的自主式小型机器鼠系统研究 学生:谢群指导老师:周伦 单位:机械工程学院机械工程与自动化2003级 摘要 移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。移动机器人在工业生产中常用来完成运输和上下料等任务,同时也被广泛用于农业、医疗等不同行业。 在移动机器人相关技术研究中,路径规划技术是一个重要研究领域[17]。本文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。 基于行为的方法是由MIT的Brooks在他著名的包容式结构[42]中建立,它是一门从生物系统得到启发,而产生的用来设计自主机器人的技术,也是本文所重点研究的目标。它采用类似动物进化的自底向上的原理体系,尝试从简单的智能体来建立一个复杂的系统。将其用于解决移动机器人路径规划问题是一种新的发展趋势,它把导航问题分解为许多相对独立的行为单元,比如跟踪、避碰、目标制导等。这些行为单元是一些由传感器和执行器组成的完整的运动控制单元,具有相应的导航功能,各行为单元所采用的行为方式各不相同,这些单元通过相互协调工作来完成导航任务。 基于行为的机器人学反对抽象的定义, 因此采用具体化的解释更适合该领域的哲学思想。基于行为的机器人学的重要研究内容是系统结构而不是算法, 基于行为设计的机器人在非结构化动态环境中的性能非常优越,用基于符号的机器人学设计的类似机器人无法达到如下性能: a.高速度,高灵活性。在动态复杂环境中的移动速度很快; b.高鲁棒性。可以承受局部损坏; c.高效性。软件代码可以是传统的几百分之一,硬件可以是传统的几十分之一; d.经济性。价格是传统的十几分之一; e.可扩展性。很少改变原有系统便可增加性能; f.可靠性。分布式自组织并行工作,可靠性强。 为进一步研究基于行为的规划方法,而引入一个真实环境及任务模型,即IEEE每年举办的微型机器鼠比赛,通过设计基于行为的机器鼠模型论证该算法的可行性。此项比赛要求机器人能 第32卷第4期2006年7月 光学技术 OPTICAL TECHN IQU E Vol.32No.4 J uly 2006 文章编号:1002-1582(2006)04-0591-03 一种基于单目视觉的移动机器人室内导航方法Ξ 付梦印,谭国悦,王美玲 (北京理工大学信息科学技术学院自动控制系,北京 100081) 摘 要:针对室内导航的环境特点,提出了一种简单快速的、以踢脚线为参考目标的移动机器人室内导航方法。该方法从图像中提取踢脚线作为参考直线,通过两条直线在图像中的成像特征,提取角度和横向偏离距离作为移动机器人的状态控制输入,从而实现移动机器人的横向运动控制。该方法无需进行摄像机的外部参数标定,大大简化了计算过程,提高了视觉导航的实时性。 关键词:视觉导航;直线提取;Hough变换;移动机器人;踢脚线 中图分类号:TP242.6+2;TP391 文献标识码:A An indoor navigation algorithm for mobile robot based on monocular vision FU Meng-yin,T AN G uo-yue,WANG Mei-ling (Department of Automatic Control,School of Information and Science Technolo gy, Beijing Institute of Technology,Beijing 100081,China) Abstract:Considered the features of indoor environment,a sim ple fast indoor navigation algorithm for vision-guide mobile robot was presented,which used skirting lines as the reference objects to locate the mobile robot.This algorithm detected skirt2 ing lines using monocular images and analyzed the lines’parameters to provide angle and distance of the robot as in puts of robot control.Without calibrating camera parameters,this algorithm greatly reduces computation time and improves the real-time a2 bility of vision navigation. K ey w ords:vision navigation;line detection;Hough transform;mobile robot;skirt line 1 引 言 近年来,机器视觉因其含有丰富的环境信息而受到普遍的关注。随着视觉传感器价格的不断下降,视觉导航已成为导航领域研究的热点。在室外进行视觉导航时,采用视觉传感器可获取车道信息,通过摄像机的标定来实现坐标转换,通过确定车辆当前的状态来实现导航。绝大部分智能车辆都是应用视觉来完成车道检测的[1,2],例如意大利的AR2 GO[3]项目就是通过使用逆投射投影的方法[4]来确定车辆状态的,并获得了良好的实验效果。在室内进行视觉导航时,利用视觉提取室内环境特征,例如一些预先设置的引导标志就是通过图像处理进行识别并理解这些标志来完成导航任务的[5,6]。这些都需要在图像中进行大量的搜索运算来提取标志,并通过一系列的图像理解算法来理解标志的信息,因而计算量很大。当然也可以通过视觉计算室内环境,例如通过走廊中的角点特征来获取状态信息[7],以此减少图像搜索时的计算量。但这些角点信息易受移动机器人运动的影响,会模糊角点信息,为了提高计算精度需要通过光流法对背景信息进行运动补偿,计算复杂,实时性不理想。 当移动机器人在实验室走廊环境下进行导航控制时,需要视觉传感器为其提供偏航角和横向偏离距离这两个参数。通过对单目视觉图像进行处理来获取这两个参数,完成移动机器人的横向运动控制。 2 摄像机成像模型与视觉系统 2.1 摄像机成像模型 使用视觉传感器首先要考虑的是其成像模型,它是指三维空间中场景到图像平面的投影关系,不同的视觉传感器有不同的成像模型。本文采用高分辨率CCD摄像机作为视觉传感器,其成像模型为针孔模型,空间中任意一点P在图像上的成像位置可以用针孔模型近似表示。如图1所示,P点投影位置为p,它是光心O同P点的连线O P与图像平面的交点,这种关系叫投射投影。图中标出的坐标系定义如下[8]: (1)图像坐标系I(u,v)是以图像平面的左上角为坐标原点所定义的直角坐标系,以像素为单位表示图像中点的位置。 (2)像平面坐标(x,y)指的是CCD成像靶面 195 Ξ收稿日期:2005-07-12 E-m ail:guoyuetan@https://www.360docs.net/doc/727700749.html, 基金项目:国家自然科学基金资助项目(60453001) 作者简介:付梦印(1964-),男,北京理工大学信息科学技术学院自动控制系教授,博士,主要从事导航制导、控制组合导航及智能导航技术的研究。 基于视觉导航的轮式移动机器人设计方案第一章移动机器人 §1.1移动机器人的研究历史 机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器)。1962年,美国Unimation公司的第一台机器人Unimate。在美国通用汽车公司(GM)投入使用,标志着第一代机器人的诞生。 智能移动机器人更加强调了机器人具有的移动能力,从而面临比固定式机器人更为复杂的不确定性环境,也增加了智能系统的设计复杂度。1968年到1972年间,美国斯坦福国际研究所(Stanford Research Institute, SRI)研制了移动式机器人Shaky,这是首台采用了人工智能学的移动机器人。Shaky具备一定人工智能,能够自主进行感知、环境建模、行为规划并执行任务(如寻找木箱并将其推到指定目的位置)。它装备了电视摄像机、三角法测距仪、碰撞传感器、驱动电机以及编码器,并通过无线通讯系统由二台计算机控制。当时计算机的体积庞大,但运算速度缓慢,导致Shaky往往需要数小时的时间来分析环境并规划行动路径。 1970年前联月球17号探测器把世界第一个无人驾驶的月球车送七月球,月球车行驶0.5公里,考察了8万平方米的月面。后来的月球车行驶37公里,向地球发回88幅月面全景图。在同一时代,美国喷气推进实验室也研制了月球车(Lunar rover),应用于行星探测的研究。采用了摄像机,激光测距仪以及触觉传感器。机器人能够把环境区分为可通行、不可通行以及未知等类型区域。 1973年到1979年,斯坦福大学人工智能实验室研制了CART移动机器人,CART可以自主地在办公室环境运行。CART每移动1米,就停下来通过摄像机的图片对环境进行分析,规划下一步的运行路径。由于当时计算机性能的限制,CART每一次规划都需要耗时约15分钟。CMU Rover由卡耐基梅隆大学机 机器人最实用的10种传感器盘点 随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感产业也形成了生产和科研力量。 内传感器 机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等安装在一起,完成位置、速度、力度的测量,实现伺服控制。 位置(位移)传感器 直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对式编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动。 速度和加速度传感器 速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度,及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。此外还有测速发电机用于测速等。 应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生动力,即应用应变仪测量此力进行推演,还有就是下面所说的方法: 与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又能有多种振动式加速度传感器。 工业机器人及机器人视觉系统 人类想要实现一系列的基本活动,如生活、工作、学习就必须依靠自身的器官,除脑以外,最重要的就是我们的眼睛了,(工业)机器人也不例外,要完成正常的生产任务,没有一套完善的,先进的视觉系统是很难想象的。 机器视觉系统就是利用机器代替人眼来作各种测量和判断。它是计算科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。图像处理和模式识别等技术的快速发展,也大大地推动了机器视觉的发展。 机器视觉系统的应用 在生产线上,人来做此类测量和判断会因疲劳、个人之间的差异等产生误差和错误,但是机器却会不知疲倦地、稳定地进行下去。一般来说,机器视觉系统包括了照明系统、镜头、摄像系统和图像处理系统。对于每一个应用,我们都需要考虑系统的运行速度和图像的 处理速度、使用彩色还是黑白摄像机、检测目标的尺寸还是检测目标有无缺陷、视场需要多大、分辨率需要多高、对比度需要多大等。从功能上来看,典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分 工作过程 ?一个完整的机器视觉系统的主要工作过程如下: ?1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。 ?2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。 ?3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。 ?4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。 超声波传感器在移动机器人的应用(探测障碍物) 摘要:移动机器人通过各种传感器系统感知外界环境和自身状态,在复杂的环境自主移动并完成相应的任务,超声波传感器以其独有的特征而被青睐, 关键词:超声波传感机器人障碍物探测 前言: 随着机器人技术的发展,自主移动机器人以其灵活性和智能性等特点,在人们的生产生活中应用越来越广泛,移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。这是用不同的传感器测量并从那些测量中提取有意义的信息而实现的。视觉、红外、激光、超声波等传感器都在移动机器人中得到实际应用。超声波是一种在弹性介质中的机械振荡,有两种形式:横向振荡(横波)及纵和振荡(纵波)。在工业中应用主要采用纵向振荡。超声波可以在气体、液体及固体中传播,其传播速度不同。另外,它也有折射和反射现象,并且在传播过程中有衰减。在空气中传播超声波,其频率较低,一般为几十KHZ,而在固体、液体中则频率可用得较高。在空气中衰减较快,而在液体及固体中传播,衰减较小,传播较远。利用超声波的特性,可做成各种超声传感器,配上不同的电路,制成各种超声测量仪器及装置,并在通迅,医疗家电等各方面得到广泛应用。超声波传感器以其性价比高、硬件实现简单,成本低,不易受电磁、光线被测对象颜色烟雾影响等优点,在移动机器人感知系统中得到了广泛的应用。但是超声波传感器也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个超声波传感器或采用其他传感器来补偿。 超声波传感器在移动机器人的应用 由于用超声波测量距离并不是一个点测量。超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,左右约30°的扩散角,但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。另外,超声波这种发散特性在应用于测量障碍物的时候,只能提供目标障碍物的距离信息,而不能提供目标的方向和边界信息。这些缺陷都大大限制了超声波传感器的实际应用和推广。 在移动机器人行走过程中,由于随时可能遇到障碍物,而且障碍物的大小、多少未知,所以能够顺利地到达目的地,本设计系统使用了两个超声波传感器进行检测现场的环境信息,使它们的信息能够相互补充。在超声波感应器检测过程中,若有一个检测到一个障碍物,另一个检测到另一个障碍物,做如下处理:如果两传感器同时检测到障碍物,那么认为是同一个物体;相反,如果两传感器不同时检测到障碍物时,那么认为是两个物体。显然,探测系统在角度上是离散的,存在一定的分辨力,很可能把两个相近的物体看成同一个物体,但这两种情况并不影响移动机器人的行走,因为当两种物体相近时,移动机器人不可能从它们的间隙中走过,因此,把它们看成是同一物体是合理的,至少可以减少计算的复杂性。 障碍物的信息包括:超声波传感器中心到障碍物的最短距离和障碍物相对于车体的方位,移动机器人运行过程中,实时采集每个方向上超声波传感器中心到障碍物边界距离,进行比较划分找到其中最短的距离及方位最为车体到障碍物的最短距离及方位。避障算法如下:移动机器人以某一速度前进,如果某一传感器检测的距离小于d,这个距离是预定义可编程的临界距离,那么机器人以某一 移动机器人的自主导航控制 一、研究的背景 移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、计算机技术、机械工程、电子工程、自动化控制工程以及人工智能等多学科的研究成果,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、国防、医疗、服务等行业中得到广泛的应用,而且在排雷、搜捕、救援、辐射和空间领域等有害与危险场合都得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 在自主式移动机器人相关技术的研究中,导航技术是其研究核心,同时也是移动机器人实现智能化及完全自主的关键技术。导航是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动。导航主要解决以下三方面的问题:(l)通过移动机器人的传感器系统获取环境信息;(2)用一定的算法对所获信息进行处理并构建环境地图;(3)根据地图实现移动机器人的路径规划及运动控制。 二、相关技术 移动机器人定位是指确定机器人在工作环境中相对于全局坐标的位置,是移动机器人导航的基本环节。定位方法根据机器人工作环境的复杂性、配备传感器种类和数量等方面的不同而采用多种方法。主要方法有惯性定位、标记定位、GPS定位、基于地图的定位等,它们都不同程度地适用于各种不同的环境,括室内和室外环境,结构化环境与非结构化环境。 惯性定位是在移动机器人的车轮上装有光电编码器,通过对车轮转动的记录来粗略地确定移动机器人位置。该方法虽然简单,但是由于车轮与地面存在打滑现象,生的累积误差随路径的增加而增大,导致定位误差的逐渐累积,从而引起更大的差。 标记定位法是在移动机器人工作的环境里人为地设置一些坐标已知的标记,超声波发射器、激光反射板等,通过机器人的传感器系统对标记的探测来确定机器人在全局地图中的位置坐标。三角测量法是标记定位中常用的方法,机器人在同一点探测到三个陆标,并通过三角几何运算,由此可确定机器人在工作环境中的坐标。标记定位是移动机器人定位中普遍采用的方法,其可获得较高的定位精度且计量小,但是在实际应用中需要对环境作一些改造,添加相应的标记,不太符合真正意义的自主导航。 GPS定位是利用环绕地球的24颗卫星,准确计算使用者所在位置的庞大卫星网 定位系统。GPS定位技术应用已经非常广泛,除了最初的军事领域外,在民用方面也得到了广泛的应用,但是因为在移动导航中,移动GPS接收机定位精度受到卫 星信号状况和道路环境的影响,同时还受到时钟误差、传播误差、接收机噪声 第9卷 第7期2004年7月 中国图象图形学报Journal of Image and G raphics V ol.9,N o.7July 2004 基金项目:国家“863”计划资助项目(编号:2001AA422200)收稿日期:2004201213;改回日期:2004204206 基于路径识别的移动机器人视觉导航 张海波 原 魁 周庆瑞 (中国科学院自动化研究所高技术创新中心,北京 100080) 摘 要 跟随路径导引是自主式移动机器人广泛采用的一种导航方式,其中视觉导航具有其他传感器导航方式所无法比拟的优点,是移动机器人智能导航的主要发展方向。为了提高移动机器人视觉导航的实时性和准确性,提出了一个基于路径识别的视觉导航系统,其基本思想是首先用基于变分辨率的采样二值化和形态学去噪方法从原始场景图像中提取出目标支持点集,然后用一种改进的哈夫变化检测出场景中的路径,最后由路径跟踪模块分直行和转弯两种情况进行导航计算。实验结果表明,该视觉导航系统具有较好的实时性和准确性。关键词 自主式移动机器人 视觉导航 路径识别 中图法分类号:TP242.62 文献标识码:A 文章编号:100628961(2004)0720853205 Visual N avigation of a Mobile R obot B ased on P ath R ecognition ZH ANG Hai 2bo ,Y UAN K ui ,ZH OU Qing 2rui (Hi 2tech Innovation Centre ,Institute o f Automation ,Chinese Academy o f Sciences ,Beijing 100080) Abctract G uidance using path following is widely applied in the field of autonom ous m obile robots.C om pared with the navigation system without vision ,visual navigation has obvious advantages as rich in formation ,low cost ,quietness ,innocuity ,etc.This pa 2per describes a navigation system which uses the visual in formation provided by guide lines and color signs.In our approach ,the visual navigation is com posed of three main m odules :image 2preprocessing ,path 2recognition and path 2tracking.First ,image 2pre 2processing m odule formulates color m odels of all kinds of objects ,and establishes each object ’s support through adaptive subsam 2pling 2based binarization and mathematical m orphology.Second ,path 2recognition m odule detects the guide lines through an im 2proved H ough trans form alg orithm ,and the detected results including guide lines and color signs integrate the path in formation.Fi 2nally ,calling different functions according to the m ovement of straight 2g oing or turning ,path 2tracking m odule provides required in 2put parameters to m otor controller and steering controller.The experimental results dem onstrate the effectiveness and the robustness of our approach. K eyw ords com puter perception ,autonom ous m obile robot ,visual navigation ,path recognition 1 引 言 导航技术是移动机器人的一项核心技术,其难 度远远超出人们最初的设想,其主要原因有:一是环境的动态变化和不可预测;二是机器人感知手段的不完备,即很多情况下传感器给出的数据是不完全、不连续、不可靠的[1]。这些原因使得机器人系统在复杂度、成本和可靠性方面很难满足要求。 目前广泛应用的一种导航方式是“跟随路径导 引”,即机器人通过对能敏感到的某些外部的连续路 径参照线作出相应反应来进行导航[2]。这种方法和传统的“硬”自动化相比大大增加了系统的灵活性,其具有代表性的系统有:C ontrol Engineering 公司安装的导线引导系统,它是通过检测埋在地下的引导导线来控制行进方向,其线路分岔则通过在导线上加载不同频率的电流来实现[3];Egemin Automation 公司生产的Mailm obile 机器人则安装有主动式紫外光源,并通过3个光电探头来跟随由受激化学物质构成的发光引导路径[4];Macome 公司为自动驾驶车 机器人视觉系统系统基本组成:CCD、PCI、PC及其外设等 1.机器人视觉 机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度,这些眼睛亦可称为VO(视觉里程计:单目or立体),维基百科给出的介绍:在机器人和计算机视觉问题中,视觉里程计就是一个通过分析处理相关图像序列来确定机器人的位置和姿态。 当今,由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。而现实世界是三维的,而投射于摄像镜头(CCD/CMOS)上的图像则是二维的,视觉处理的最终目的就是要从感知到的二维图像中提取有关的三维世界信息。 2.系统基本组成:CCD、PCI、PC及其外设等。 2.1 CCD/CMOS一行硅成像元素,在一个衬底上配置光敏元件和电荷转移器件,通过电荷的依次转移,将多个象素的视频信号分时、顺序地取出来,如面阵CCD传感器采集的图像的分辨率可以从32×32到1024×1024像素等。 2.2视频数字信号处理器图像信号一般是二维信号,一幅图像通常由512×512个像素组成(当然有时也有256×256,或者1024×1024个像素),每个像素有256级灰度,或者是3×8bit,红黄兰16M种颜色,一幅图像就有256KB或者768KB(对于彩色)个数据。为了完成视觉处理的传感、预处理、分割、描述、识别和解释,上述前几项主要完成的数学运算可归纳为: (1)点处理常用于对比度增强、密度非线性较正、阈值处理、伪彩色处理等。每个像素的输入数据经过一定关系映射成像素的输出数据,例如对数变换可实现暗区对比度扩张。(2)二维卷积的运算常用于图像平滑、尖锐化、轮廓增强、空间滤波、标准模板匹配计算等。移动机器人导航技术总结
机器人上用的传感器的介绍
一种由Matlab仿真控制的自主移动机器人模拟器(英文)
移动机器人视觉导航
基于行为设计的自主式小型移动机器人系统研究详细摘要(正式)
一种基于单目视觉的移动机器人室内导航方法
基于视觉导航的轮式移动机器人设计方案
机器人最实用的10种传感器盘点
工业机器人视觉系统
超声波传感器在移动机器人的应用(探测障碍物)
移动机器人的自主导航控制
基于路径识别的移动机器人视觉导航
机器人视觉系统系统基本组成:CCD、PCI、PC及其外设等