High-resolution radio polarimetry of Vela X

a r
X
i
v
:a
s t
r o
-
p
h
/
1
1
2
1
57
v
1
6
D
e
c
2
1
Neutron Stars in Supernova Remnants ASP Conference Series,Vol.9999,2002P.O.Slane and B.M.Gaensler,eds.High-resolution radio polarimetry of Vela X Douglas C.-J.Bock Radio Astronomy Laboratory,University of California at Berkeley,601Campbell Hall,Berkeley,CA 94720,USA;dbock@https://www.360docs.net/doc/748118025.html, Robert J.Sault,Douglas https://www.360docs.net/doc/748118025.html,ne CSIRO Australia Telescope National Facility,P.O.Box 76,Epping,NSW 1710,Australia Anne J.Green School of Physics,University of Sydney,NSW 2006,Australia Abstract.We present high-resolution 1.4GHz Australia Telescope Compact Array polarimetric observations of Vela X,the pulsar wind nebula of the Vela SNR.We ?nd that the linearly polarized emission is only partially correlated with total intensity.There are many depolarization features,some of which are coincident with foreground H α?laments.Further study of these should provide measurements of the magnetic ?eld in the remnant’s shell.1.Introduction Vela X is the pulsar wind nebula near the center of the Vela supernova remnant (Bock,Turtle,&Green 1998b).In total intensity,the radio emission is domi-nated by synchrotron ?laments which have no clear optical counterpart (Bock et
al.1998a).The remnant’s distance of 350pc 1makes it one of the nearest SNRs,and thus one of the easiest to study.Its age,10,000yr,is much larger than that of the Crab Nebula,and we can hope to learn something about remnant evolution by comparing the sources.High quality interferometric polarimetry now makes it possible to study at sub-arcminute resolution the magnetic ?elds in pulsar-powered nebulae,and in the Galaxy as a whole.
2.Observations
Observations of Vela X at 1.4GHz were obtained with the Australia Telescope Compact Array (ATCA)using con?gurations which yielded a 50′′×35′′beam.
2Bock et al.
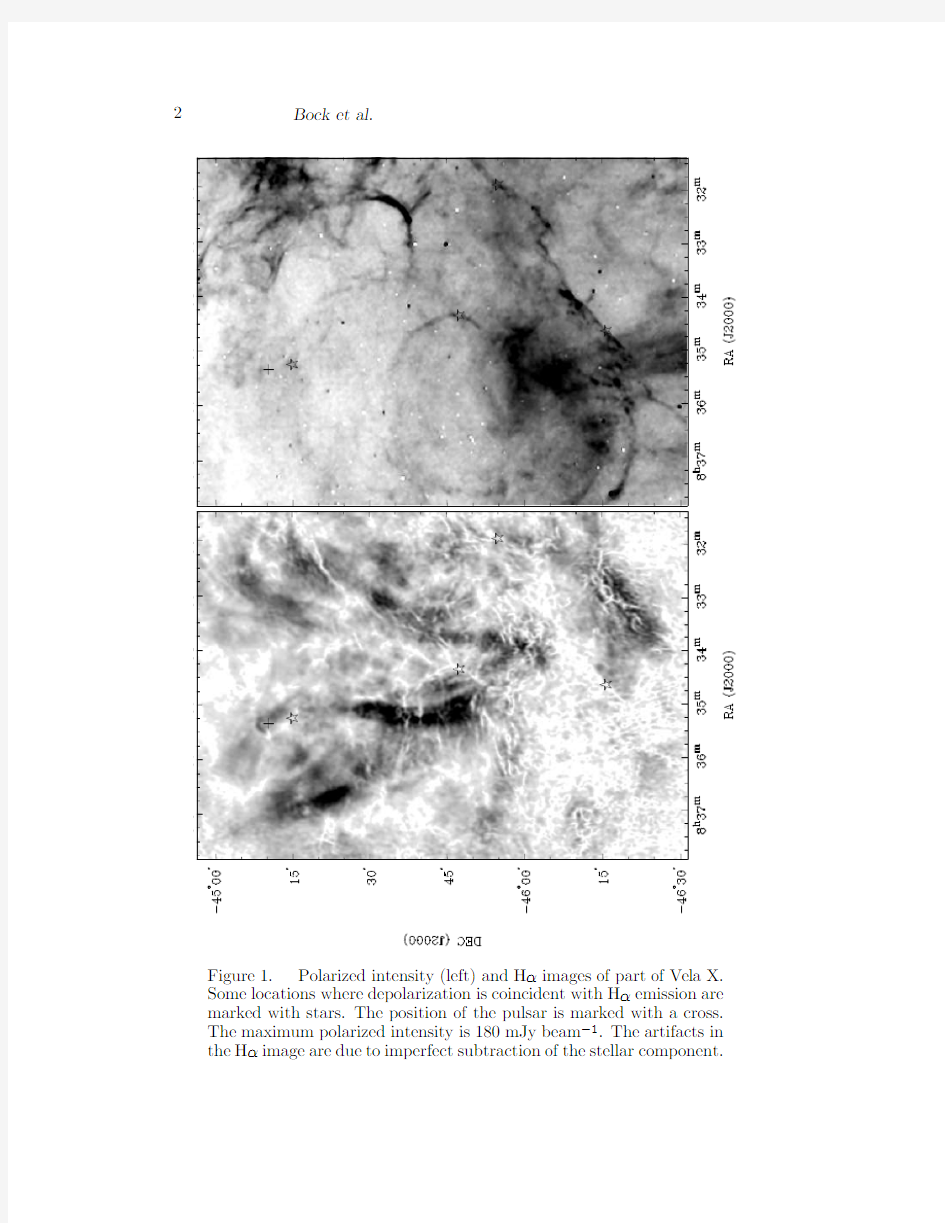
Figure1.Polarized intensity(left)and Hαimages of part of Vela X.
Some locations where depolarization is coincident with Hαemission are marked with stars.The position of the pulsar is marked with a cross.
The maximum polarized intensity is180mJy beam?1.The artifacts in the Hαimage are due to imperfect subtraction of the stellar component.
High-resolution radio polarimetry of Vela X3
Figure2.Polarization E-vectors overlaid on total intensity.The
peak total intensity of the extended emission is220mJy beam?1.The
synthesized beam and a bar representing the maximum polarized in-
tensity of106mJy beam?1are shown at the lower right.The three
unresolved sources are most likely of extragalactic origin.
Images were made using multi-frequency synthesis and deconvolution was per-formed with a maximum entropy method algorithm.The total intensity image includes large-scale structure which was measured with the Parkes Telescope. However,there is little structure in polarized intensity larger than that sampled by the interferometer,so single-dish data has not been included in the polar-ization images.See Sault,Bock,&Duncan(1999)for additional details.A grayscale image showing the polarized intensity measured from part of Vela X is shown in Figure1.The emission is up to60%linearly polarized;there is no detectable circular polarization.Figure1also shows the Hαemission from the same region(from the survey of Buxton,Bessell,&Watson1998).Vectors rep-resenting the intensity and E-?eld direction of the polarized emission are plotted on a total intensity image in Figure2.
4Bock et al.
3.Discussion
The most striking aspect of the polarimetric image of Vela X(Figure1)is the complex network of‘canals’criss-crossing the broader synchrotron?laments. These canals are unresolved,indicating that they are probably due to Faraday depolarization within the synthesized beam,caused by rapid spatial changes in the foreground rotation measure(RM).They have no counterpart in total intensity.Similar features have been seen in the background Galactic radiation (Gaensler et al.2001,and references therein).However,in the present case we have been able to identify optical counterparts for many of the canals among Hα?laments originating in the shell of the Vela SNR(Figure1).By considering the geometry of the?laments(which are probably sheets in projection)and obtaining electron densities in the region from further optical studies,we expect to be able to make a direct measurement of the compressed magnetic?eld in the Vela SNR shell.
The underlying more di?use linearly polarized emission has some overall corellation with total intensity.However,there are many regions of disagree-ment.These could be either intrinsic to the source(i.e.due to variations within the internal magnetic?elds)or result from depolarization by some intervening more compact region.In the latter case,their counterpart in total intensity is the underlying di?use emission which forms the majority of the?ux density measured from Vela X.
The polarization E-vector direction(Figure2)is a useful diagnostic of the magnetic?eld.In this region,the RM is approximately40rad m?2(Milne1995), indicating that the magnetic?eld is generally aligned with the E-vectors plotted, and thus lies along the?laments(the discrepant E-vectors half-way along the central?lament correspond to a region of higher RM).We note that the‘wisp’just to the north-east of the pulsar(Bietenholz,Frail,&Hankins1991)and the ?lament extending south do not appear symmetric across the pulsar.Further work to make high-resolution corrections for Faraday rotation will allow a more detailed interpretation.
References
Bietenholz,M.F.,Frail,D.A.,Hankins,T.H.1991,ApJ,376,L41
Bock,D.C.-J.,Frail,D.A.,Sault,R.J.,Green,A.J.,&Milne,D.K.1998a, Mem.Soc.Astron.Italiana,69,919
Bock,D.C.-J.,Turtle,A.J.,&Green,A.J.1998b,AJ,116,1886
Buxton,M.,Bessell,M.,Watson,B.1998,Publ.Astron.Soc.Australia,15,24 Caraveo,P.A.,De Luca,A.,Mignani,R.P.,&Bignami,G.F.2001,ApJ,561, 930
Gaensler,B.M.,Dickey,J.M.,McClure-Gri?ths,N.M.,Green,A.J.,Wieringa, M.H.,&Haynes,R.F.2001,ApJ,549,959
Legge,D.2001,PhD Thesis,University of Tasmania
Milne,D.K.1995,MNRAS,277,1435
Sault,R.J.,Bock,D.C.-J.,&Duncan,A.R.1999,A&AS,139,387
局域网点对点通信软件设计与实现
《网络编程技术》 课程设计报告 课程设计题目:局域网点对点通信软件与实现作者所在系部:计算机科学与工程系 作者所在专业:网络工程 作者所在班级: 作者姓名: 作者学号: 指导教师姓名: 完成时间: 2013年07月10日
课程设计任务书
摘要 所谓网络中的点对点通信是实现网络上不同计算机之间,不经过任何中继设备而直接交换数据或服务的一种技术。由于允许网络中任何一台计算机可以直接连到网络中的其他计算机,并与之进行数据交换,这样既可以消除中间环节,也使得网络上的沟通变的更加容易、更加直接。本文介绍的是一种是用Winsock编程技术,基于TCP/IP协议的、面向连接的流式套接字网络通信编程设计。 局域网即时通讯软件使用TCP协议作为传输层的协议,采用点对点模式服务,不需要服务器支持,使局域网用户的使用更加方便和高效。它可以实现局域网用户的自动检测,用户间文本信息的交流,文件的传输等功能。 本系统使用Visual Studio 2010作为开发工具,将.NET中的一些技术运用到系统中关键词:点对点;TCP/IP;Socket;UDP;P2P
目录 摘要 (2) 目录 (3) 第1章绪论 (4) 1.1课题研究现状分析 (4) 1.2选题的目的及意义 (4) 第2章系统需求分析 (5) 2.1 问题的提出 (5) 2.2 系统的设计目标 (5) 第3章系统总体设计 (6) 3.1系统功能设计 (6) 3.2功能模块的说明 (7) 3.2.1初始化(广播用户信息) (7) 3.2.2用户列表管理 (7) 3.2.3文本信息传输 (7) 3.2.4文件传输 (7) 3.2.5发送心跳包 (7) 第4章系统实现 (8) 4.1初始化模块的设计和实现 (8) 4.1.1监听端口 (8) 4.2 广播消息 (8) 4.3 文本消息的发送和接收 (9) 4.4 文件的发送和接收 (12) 4.5发送心跳包 (14) 第5章课程设计总结 (16) 5.1 主要问题及解决办法 (16) 5.2 课程设计体会 (16) 5.3 自我评定 (16) 参考文献 (17)
“慧鱼模型”三自由度机械手
湖北理工学院毕业设计(论文) “慧鱼模型”三自由度机械手 设 计 小 册 学院:机电工程学院 班级:机械设计与制造 指导老师: 姓名:学号:201030120130 湖北理工学院毕业设计(论文) 一、概述 ............................................................ 1 1.1机电一体化技术 ................................................... 1 1.1.1机电一体化技术的定义和内容 (1) 1.1.2机电一体化系统组成 (1) 1.2. 慧鱼机器人 ..................................................... 2 1.2.1慧鱼创意教学组合模型简介 (2) 二、机器人的组成 .....................................................
2.1组成构件 ......................................................... 3 2.2慧鱼机器人分析 ................................................... 6 2.2.1机器人机构组成 (6) 2.2.2主要成分构成及功能 (7) 2.3. 机器人的工作空间形式 ............................................ 9 2.4机器人的机械运动形态和变换控制 .................................. 11 2.5机器人的位移、速度、方向的控制方法 (13) 湖北理工学院毕业设计(论文) 一、概述 1.1机电一体化技术 1.1.1机电一体化技术的定义和内容 机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则 运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。 1.1.2机电一体化系统组成 1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着支撑系统中其他功能单元、传递运动和动力的作用。 2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是检测机电一体化系统工作过程中本身和外界环境有关参量的变化,并将信息传递给电子控制单元,电子控制单元根据检查到的信息向执行器发出相应的控制。 3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器的检测信号和外部输入命令进行集中、存储、计算、分析,根据信息处理结果,按照一定的程度和节奏发出相应的指令,控制整个系统有目的地进行。 4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。执行器是运动部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。 5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械系统提供能量和动力使系统正常运行。提供能量的方式包括电能、气能和液压
西方投资组合理论及其新发展综述.
西方投资组合理论及其新发展综述 投资组合理论有狭义和广义之分。狭义的投资组合理论指的是马柯维茨投资组合理论;而广义的投资组合理论除了经典的投资组理论以及该理论的各种替代投资组合理论外,还包括由资本资产定价模型和证券市场有效理论构成的资本市场理论。同时,由于传统的EMH不能解释市场异常现象,在投资组合理论又受到行为金融理论的挑战。 一、50年代以前的投资组合理论 在马柯维茨投资组合理论提出以前,分散投资的理念已经存在。Hicks(1935)提出了“分离定理”,并解释了由于投资者有获得高收益低风险的期望,因而有对货币的需要;同时他认为和现存的价值理论一样,应构建起“货币理论”,并将风险引入分析中,因为风险将影响投资的绩效,将影响期望净收入。Kenes(1936)和Hicks(1939)提出了风险补偿的概念,认为由于不确定性的存在,应该对不同金融产品在利率之外附加一定的风险补偿,Hicks还提出资产选择问题,认为风险可以分散。Marschak(1938)提出了不确定条件下的序数选择理论,同 时也注意到了人们往往倾向于高收益低风险等现象。Williams(1938)提出了“分散折价模型”(dividend dis-count model),认为通过投资于足够多的证券,就可以消除风险,并假设总存在一个满足收益最大化和风险最小化的组合,同时能通过法律保证使得组合的事实收益和期 望收益一致。Leavens(1945)论证了分散化的好处。随后V on Neumann(1947)应用预期效用的概念提出不确定性条件下的决策选择方法。 二、马柯维茨投资组合理论及其扩展 美国经济学家Markowitz(1952)发表论文《资产组合的选择》,标志着现代投资组合理论的开端。他利用均值--方差模型分析得出通过投资组合可以有效降低风险的结论。 同时,Roy(1952)提出了“安全首要模型”(Safety-First Portfolio Theory),将投资组合的均值和方差作为一个整体来选择,尤其是他提出以极小化投资组合收益小于给定的“灾险水平”的概率作为模型的决策准则,为后来的VaR(Value at Risk)等方法提供了思路。 Tobin(1958)提出了著名的“二基金分离定理”:在允许卖空的证券组合选择问题中,每一种有效证券组合都是一种无风险资产与一种特殊的风险资产的组合。 在Markowitz等人的基础上,Hicks(1962)的“组合投资的纯理论”指出,在包含现金的资产组合中,组合期望值和标准差之间有线形关系,并且风险资产的比例仍然沿着这条线形的有效边界这部分上,这就解释了Tobin的分离定理的内容。Wiliam.F.Sharpe(1963)提出“单一指数模型”,该模型假定资产收益只与市场总体收益有关,从而大大简化了马柯维茨理论中所用到的复杂计算。 马柯维茨的模型中以方差刻画风险,并且收益分布对称,许多学者对此提出了各自不同的见解。
点对点和点对多点语音通信的应用
听《多点对多点通信》讲座有感之《点对点和点对多点语音通信的应用》
PoC将直接的点对点和点对多点语音通信业务引入到蜂窝网络中,使流行的半双工无线业务在蜂窝手机中得以应用,这将为运营商带来更多的注册新用户,同时增加ARPU。 多样化平台 该业务的原理其实比较简单,我们称之为“JustPushtoTalk”,这得益于“always-on”连接,IP技术正是实现该连接的根本。正是这个特点,呼叫可以仅仅通过按一个键,而且不管是在点对点用户中还是在通话群组中,在相对较短的时间内建立连接。PoC业务并不替代现已存在的蜂窝业务,不用改变传统的语音业务。建立在半双工VoIP基础上的PoC解决方案,构建在当前GSM/GPRS网络上,保护了投资,并能平滑过渡到3G,PoC业务同样可以看作为IMS(3GR5以上内容)前期服务。面向电路交换的移动网络,在用户通话之前必须通过拨号进行呼叫建立过程,这一点与“always-on”连接截然不同。在用户通话过程中,面向电路交换的呼叫始终占据上行和下行两个方向的资源;而基于半双工的PoC业务,只在有通话过程中占用资源,通话结束立即释放,所以能大量节省资源。 OMA对PoC统一地进行了标准化工作,以保证其互连互通性,提供一个能开展多媒体应用的业务平台。烽火移动公司结合OMA标准,根据对PoC的深入研究和理解,并提出了基于OMA的PoC构架模型。 新的突破 烽火移动公司已经在由我国自主知识产权的国际通讯标准———TD-SCDMA 上对PoC业助,緯累了一定的研究抐果,具备了相容完备的圬TD-SCDMA网络上宾瞐PoC业务的技术和概念。 基于OMA标准揑出的PoC构架,烽火移动公司提出亄TD-SCDOA网络中PoC 业务的具体实现方案。该方案将PoC服务器放在运营商IP网络中?SI?CORE 在TD-S?DMA穑络IMS域的CSCF中实现。PoC业务(包括语音、数字,以及将潥的视频等)?据均由TD-SCD?A的分?业务传送方式提供:语音采用BTP/IP支持的VoIP方式提供,使用AMR编码(比?:5.15kb?t/s),能提高字节和帧的容错
基于STC89C51的CAN总线点对点通信模块设计
基于STC89C51的CAN总线点对点通信模块设计 [导读]随着人们对总线对总线各方面要求的不断提高,总线上的系统数量越来越多,继而出现电路的复杂性提高、可靠性下降、成本增加等问题。为解决上述问题,文中阐述了基于SJAl000的CAN总线通信模块的实现方法,该方法以PCA82C250作为通信模块的总线收发器,以SITA-l000作为网络控制器。并以STCSTC89C5l单片机来完成基于STC89C5l的CAN通信硬件设计。文章还就平台的初始化、模块的发送和接收进行了设计和分析。通过测试分析证明,该系统可以达到CAN的通信要求,整个系统具有较高的实用性。 0 引言 现场总线是应用在生产最底层的一种总线型拓扑网络,是可用做现场控制系统直接与所有受控设备节点串行相连的通信网络。在工业自动化方面,其控制的现场范围可以从一台家电设备到一个车间、一个工厂。一般情况下,受控设备和网络所处的环境可能很特殊,对信号的干扰往往也是多方面的。但要求控制则必须实时性很强,这就决定了现场总线有别于一般的网络特点。此外,由于现场总线的设备通常是标准化和功能模块化,因而还具有设计简单、易于重构等特点。 1 CAN总线概述 CAN (Controller Area Network)即控制器局域网络,最初是由德国Bosch公司为汽车检测和控制系统而设计的。与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。其良好的性能及独特的设计,使CAN总线越来越受到人们的重视。由于CAN总线本身的特点,其应用范围目前已不再局限于汽车行业,而向自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。目前,CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。它的直线通信距离最大可以达到l Mbps/30m.其它的节点数目取决于总线驱动电路,目前可以达到110个。 2 CAN系统硬件设计 图1所示是基于CAN2.0B协议的CAN系统硬件框图,该系统包括电源模块、MCU部分、CAN控制器、光电耦合器、CAN收发器和RS232接口。硬件系统MCU采用STC89C5l,CAN控制器采用SJAl000,CAN收发器采用PCA82C250,光耦隔离采用6N137。
世界史重大事件时间表(完整版)
大学世界史重大事件时间表(完整版)适用于大学、高中、初中生 世界历史大事年表 大约三百万年前地球上出现人类 公元前3100年左右埃及形成统一的奴隶制国家 公元前3000年左右 两河流域出现奴隶制城市国家 公元前3000年代中期印度河流域哈拉帕文化 公元前2100年左右 埃及奴隶河贫民大起义 公元前1894年古巴比伦王国建立 公元前1000年左右努比亚建立奴隶制国家 公元前594年雅典的梭伦改革 公元前六世纪居鲁士统一波斯,佛教在印度产生 公元前539年 波斯占领巴比伦 公元前525年波斯灭埃及 公元前509年罗马成立贵族专政的奴隶制共和国 公元前330年波斯被马其顿灭亡 公元前三世纪摩揭陀国统一印度大部分地区 公元前73-71年 斯巴达克起义 公元前27年屋大维建立罗马的元首制,共和国转为帝国公元前后朝鲜半岛出现高句丽奴隶制国家 公元初东非阿克苏姆奴隶制国家兴起 公元一世纪基督教产生 公元三世纪日本大和奴隶制国家兴起 313年基督教在罗马取得合法地位 四世纪北非发生“阿哥尼斯特”运动 378年 西哥特人在阿德里亚堡击败罗马军队 395年罗马分裂为东西两部 410年西哥特人一度占领罗马 476年西罗马帝国灭亡,西欧奴隶制度崩溃 六世纪初法兰克王国建立 622年 穆罕默德从麦加出走麦地拉,伊斯兰教纪元 八世纪中叶阿拉伯帝国形成 646年日本大化改新 676年 新罗统一朝鲜
九世纪早期英吉利王国形成 843年查里曼帝国分裂,法兰西、德意志、意大利雏形产生九世纪封建制度在西欧确立 962年神圣罗马帝国建立 1054年基督教会分裂 1066年 法国诺曼底公爵征服英国 十一世纪中叶加纳王国全盛时期 1192年日本幕府政治建立 十三世纪 埃塞俄比亚封建国家兴起 十四世纪马里王国全盛时期,意大利出现资本主义萌芽 十四至十六世纪欧洲文艺复兴运动 1337年英法百年战争开始 1358年法国农民起义 1381年英国瓦特。泰勒起义 1453年东罗马帝国灭亡,英法百年战争结束 十五世纪桑海兴起 十五世纪晚期 英法中央集权国家形成,圈地运动开始 1480年俄罗斯摆脱蒙古控制 1487年迪亚士到达好望角 1492年哥伦布初次航行到美洲 1497-1498年达加马开辟西欧到印度的新航路 1517年 马丁。路德发动宗教改革 1519-1522年麦哲伦船队环航地球 十六世纪 葡萄牙和西班牙殖民者在亚、美强占殖民地 1524-1525 德意志农民起义 1588年 英国海军击败西班牙“无敌舰队” 1592-1598年朝鲜军民抗击日本侵略的卫国战争 1600年 英国东印度公司建立 十七世纪初法国殖民者开始在北美拓殖 1607年英国殖民者开始在北美拓殖 1632年沙俄在西伯利亚修建侵略扩张的基地—雅库次克1640年英国资产阶级革命开始 1649年 英国王查理一世被处死 1660年英国斯图亚特王朝复辟 1688年英国政变,资产阶级和新贵族的统治确立 1689年中俄签定“尼布楚条约”
马科维茨投资组合理论
马科维茨投资组合理论 马科维茨(Harry M.Markowitz,)1990年因其在1952年提出的投资组合选择(Portfolio Selection)理论获得诺贝尔经济学奖。 主要贡献:发展了一个在不确定条件下严格陈述的可操作的选择资产组合理论:均值方差方法 Mean-Variance methodology. 主要思想:Markowitz 把投资组合的价格变化视为随机变量,以它的均值来衡量收益,以它的方差来衡量风险(因此Markowitz 理论又称为均值-方差分析);把投资组合中各种证券之间的比例作为变量,那么求收益一定的风险最小的投资组合问题就被归结为一个线性约束下的二次规划问题。再根据投资者的偏好,由此就可以进行投资决策。 基本假设: H1. 所有投资都是完全可分的。每一个人可以根据自己的意愿(和支出能力)选择尽可能多的或尽可能少的投资。 H2. 一个投资者愿意仅在收益率的期望值和方差(标准差)这两个测度指标的基础上选择投资组合。 p E =对一个投资组合的预期收益率 p σ=对一个投资组合的收益的标准差(不确定性) H3. 投资者事先知道投资收益率的概率分布,并且收益率满足正态分布的条件。 H4. 一个投资者如何在不同的投资组合中选择遵循以下规则: 一,如果两个投资组合有相同的收益的标准差和不同的预期收益,高的预期收益的投资组合会更为可取; 二,如果两个投资组合有相同的收益的预期收益和不同的标准差,小的标准差的组合更为可取; 三,如果一个组合比另外一个有更小的收益标准差和更高的预期收益,它更为可取。 基本概念 1.单一证券的收益和风险: 对于单一证券而言,特定期限内的投资收益等于收到的红利加上相应的价格变化,因此特定期限内的投资收益为: 1 1P P P t t t r --==价格变化+现金流(如果有)持有期开始时的价格 -+CF 假定投资者在期初时已经假定或预测了该投资期限内的投资收益的概率分布;将投资收益看成是随机变量。 任何资产的预期收益率都是加权平均的收益率,用各个收益发生的概率p 进行加权。预期收益率等于各个收益率和对应的概率的乘积之和。 11221 ()...n i i n n i E r p r p r p r p r ===+++∑ i p 为第i 个收益率的概率;12,,...,n r r r 为可能的收益率。 资产的风险用资产收益率的方差(variance )和标准差(standard deviation )来度量。 风险来源:市场风险(market risk ),利息率风险(interest-rate risk ),购买力风险(purchasing-power risk ),管理风险(management risk ),信用风险(credit risk ),流动性风险(liquidity risk ),保证金风险(margin risk ),可赎回风险(callability risk ),可转换风险(convertibility risk ),国内政治风险(domestic political risk ),行业风险(industry risk )。 2.投资组合: 通常说投资组合由证券构成,一种证券是一个影响未来的决策,这类决策的整体构成一个投资组合。 3.投资组合的收益和风险: (1)投资组合的收益率 构成组合的证券收益率的加权平均数。以投资比例作为权数。
远距离点对点数字通信系统设计大学论文
通信原理三级项目 班级:姓名: 学号: 指导教师: 教务处
远距离点对点数字通信系统设计 (燕山大学信息科学与工程学院) 摘要:本文讨论进行了远距离点对点数字通信系统的设计,着重讨论了模拟信号数字化的过程,其中包含了为了提高系统性能进行的信源编码技术和信道编码技术,我采用了HDB3码克服连0问题,利用奇偶监督码和差错重传机制控制误码率。另外,讨论了数字调制技术的实现,本文采用最小频移键控调制和解调技术,并讨论了在高斯白噪声信道条件下的此方法的可靠性和有效性。 关键词:脉冲编码调制,HDB3码,奇偶监督码,MSK调制,高斯白噪声,MATLAB仿真
目录 1.通信系统概述 (3) 1.1一般通信系统模型 (3) 1.2数字通信系统模型 (3) 1.3远距离语音通信系统 (4) 2.信号数字化 (4) 2.1信号的抽样 (4) 2.1.1抽样定理 (4) 2.1.2脉冲幅度调制PAM (5) 2.2信源编码 (6) 2.2.1十三折线法 (6) 2.2.2脉冲编码调制PCM (7) 2.3信道编码 (9) 2.3.1 HDB3码 (9) 2.3.2奇偶监督码 (9) 3.调制与解调 (10) 3.1 MSK调制 (10) 3.1.1 MSK调制原理 (10) 3.1.2 MSK调制 (11) 3.2 MSK解调 (12) 4.信道描述 (13) 5.系统总体设计 (14) 附录MATLAB实现代码 (14)
1.通信系统概述 1.1一般通信系统模型 一般作为一个通信系统都由发送端和接收端两部分组成,而发送端则分为信息源和发送设备两部分,接收端与其对应的有接收端和受信者两部分,发送端和接收端之间则是我们信号传输所需要经过的信道,信号在信道中传输时会有噪声的混入,这也是我们的通信系统性能讨论的终点。 图1-1 一般通信系统 信息源是把各种原始消息转换成原始电信号的设备,它通过各种物理转换的方法从自然界中采集信息并把它们转换成相应的电信号,从而便于我们通过电子设备对其进行进一步的处理。受信者则是把接受到的电信号还原成自然界中信息的设备。 发送设备是通过对采集到的原始电信号进行一系列的处理把它变成适合于远距离传输的信号。在模拟传输系统中包括放大、滤波、模拟调制等过程;在数字传输系统中则包含编码、加密、数字调制等过程。接收设备则是上述过程的逆过程,将信道中传输的信号还原成易于处理的直接电信号。 信道是从发送设备到接收设备之间信号传输的物理煤质,分为无线信道和有限信道两大类,每种信道的特点不同,应用场合也不相同。 噪声源是笼统的一个说法,它集中表示分布于通信系统中的各处的噪声。 1.2数字通信系统模型 数字通信系统是通过数字信号来传递信息的通信系统。需要注意的是,这并不代表用于在信道中传输的信号就是数字信号,数字通信系统是通过数字信号来表示要传送的信息,而在传输过程中则还是利用高频调制的模拟信号传输。 图1-2 数字通信系统
慧鱼创意组合设计实验指导书模板
慧鱼创意组合设计实验指导书
《慧鱼创意组合设计实验》课程 实验指导书 江西理工大学 机械基础实验室
慧鱼创意组合设计实验指导书 一、实验目的 本实验主要基于慧鱼创意模型系统(fischertechnik)。实验的目的是经过让学生学习动手组装模型机器人和建造自己设计的有一定功能的机器人模型产品,使学生体会创意设计的方法和意义;同时经过创意实验,使学生了解一些计算机控制、软件编程、机电一体化等方面的基础知识,加深对专业课学习的理解,为后续课的学习做一个很好地铺垫。 二、实验设备介绍 1.慧鱼创意模型系统的组成: 慧鱼创意模型系统(fischertechnik)硬件主要包括:1000多种的拼插构件单元、驱动源、传感器、接口板等。 拼插构件单元:系统提供的构件主料均采用优质的尼龙塑胶,辅料采用不锈钢芯铝合金架等,采用燕尾槽插接方式连接,可实现六面拼接,多次拆装。系统提供的技术组合包中机械构件主要包括:齿轮、联杆、链条、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮)、齿轴、齿条、涡轮、涡杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱、铰链等。 驱动源:①直流电机驱动(9V、最大功率1.1W、转速7000 prn),由于模型系统需求功率比较低(系统载荷小,需求功率只克服传动中的摩擦阻力),因此它兼顾驱动和控制两种功能。②减速直流电机驱动(9V、最大功率1.1瓦,减速比50:1/20:1)。③气动驱动包括:储气罐、气缸、活塞、电磁阀、气管等元件。
传感器:在搭接模型时,你能够把传感器提供的信息(如亮/暗、通/断,温度值等)经过接口板传给计算机。系统提供的传 感器做为控制系统的输入信号包括:①感光传感器 Brightness sensor (光电管):对亮度有反应,它和 聚焦灯泡配合使用,当有光(或无光)照在上面 时,光电管 产生不同的电阻值,引发不同信号。 ②接触传感器Contact sensor (触动开关):如图1所示, 当红色按钮按下,接触点1、3接通,同时接触点1、2 断开,因此有两种使用方法:常开:使用接触点1、3,按下按钮=导通;松开按钮=断开;常闭:使用接触点1、2,按下按钮=断开;松开按钮=导通。③热传感器Thermal sensor (NTC 电阻):可测量温度。温度20°C 时,电阻值1.5K Ω。NTC 的意思是负温度系数,温度升高电阻值下降。④磁性传感器 Magnetic sensor :非接触性开关。⑤红外线发射接收装置:新型的运用可控制所有马达电动模型的红外线遥控装置由一个强大的红外线发射器和一个微处理器控制的接收器组成。有效控制范围是10米,分别可控制三个马达。 接口板:自带微处理器,程序可在线和下载操作,用LLWin3.0或高级语言编程,经过RS232串口与电脑连接,四路马达输出,八路数字信号输入,二路模拟信号输入,具有断电保护功能(新版接口),两接口板级联实现输入输出信号加倍。 PLC 接口板:实现电平转换,直接与PLC 相连。智能接口板自带微处理器,经过串口与计算机相连。在计算机上编的程序能够移植到接口板的微处理器上,它能够不用计算机独立处理程序(在激活模式下)。 3 2 图1触动开关原理
投资组合理论简介
投资组合理论简介 投资组合理论有狭义和广义之分。狭义的投资组合理论指的是马柯维茨投资组合理论;而广义的投资组合理论除了经典的投资组合理论以及该理论的各种替代投资组合理论外,还包括由资本资产定价模型和证券市场有效理论构成的资本市场理论。同时,由于传统的EMH 不能解释市场异常现象,在投资组合理论又受到行为金融理论的挑战。 投资组合理论的提出[1] 美国经济学家马考维茨(Markowitz)1952年首次提出投资组合理论(Portfolio Theory),并进行了系统、深入和卓有成效的研究,他因此获得了诺贝尔经济学奖。 该理论包含两个重要内容:均值-方差分析方法和投资组合有效边界模型。 在发达的证券市场中,马科维茨投资组合理论早已在实践中被证明是行之有效的,并且被广泛应用于组合选择和资产配置。但是,我国的证券理论界和实务界对于该理论是否适合于我国股票市场一直存有较大争议。 从狭义的角度来说,投资组合是规定了投资比例的一揽子有价证券,当然,单只证券也可以当作特殊的投资组合。 人们进行投资,本质上是在不确定性的收益和风险中进行选择。投资组合理论用均值—方差来刻画这两个关键因素。所谓均值,是指投资组合的期望收益率,它是单只证券的期望收益率的加权平均,权重为相应的投资比例。当然,股票的收益包括分红派息和资本增值两部分。所谓方差,是指投资组合的收益率的方差。我们把收益率的标准差称为波动率,它刻画了投资组合的风险。 人们在证券投资决策中应该怎样选择收益和风险的组合呢?这正是投资组合理论研究 的中心问题。投资组合理论研究―理性投资者‖如何选择优化投资组合。所谓理性投资者,是指这样的投资者:他们在给定期望风险水平下对期望收益进行最大化,或者在给定期望收益水平下对期望风险进行最小化。 因此把上述优化投资组合在以波动率为横坐标,收益率为纵坐标的二维平面中描绘出来,形成一条曲线。这条曲线上有一个点,其波动率最低,称之为最小方差点(英文缩写是MVP)。这条曲线在最小方差点以上的部分就是著名的(马考维茨)投资组合有效边界,对应的投资组合称为有效投资组合。投资组合有效边界一条单调递增的凹曲线。 如果投资范围中不包含无风险资产(无风险资产的波动率为零),曲线AMB是一条典型的有效边界。A点对应于投资范围中收益率最高的证券。 如果在投资范围中加入无风险资产,那么投资组合有效边界是曲线AMC。C点表示无风险资产,线段CM是曲线AMB的切线,M是切点。M点对应的投资组合被称为―市场组合‖。 如果市场允许卖空,那么AMB是二次曲线;如果限制卖空,那么AMB是分段二次曲线。在实际应用中,限制卖空的投资组合有效边界要比允许卖空的情形复杂得多,计算量也要大得多。 在波动率-收益率二维平面上,任意一个投资组合要么落在有效边界上,要么处于有效边界之下。因此,有效边界包含了全部(帕雷托)最优投资组合,理性投资者只需在有效边界上选择投资组合。
基于SIMULINK的通信系统仿真毕业设计
题目基于SIMULINK的通信系统仿真 摘要 在模拟通信系统中,由模拟信源产生的携带信息的消息经过传感器转换成电信号,模拟基带信号在经过调制将低通频谱搬移到载波频率上适应信道,最终解调还原成电信号;在数字传输系统中,数字信号对高频载波进行调制,变为频带信号,通过信道传输,在接收端解调后恢复成数字信号。本文应用了幅度调制以及键控法产生调制与解调信号。 本论文中主要通过对SIMULINK工具箱的学习和使用,利用其丰富的模板以及本科对通信原理知识的掌握,完成了AM、DSB、SSB、2ASK、2FSK、2PSK三种模拟信号和三种数字信号的调制与解调,以及用SIMULINK进行设计和仿真。首先我进行了两种通信系统的建模以及不同信号系统的原理研究,然后将学习总结出的相应理论与SIMULINK中丰富的模块相结合实现仿真系统的建模,并且调整参数直到仿真波形输出,观察效果,最终对设计结论进行总结。 关键词通信系统调制 SIMULINK I
目录 1. 前言 (1) 1.1选题的意义和目的 (1) 1.2通信系统及其仿真技术 (2) 3. 现代通信系统的介绍 (3) 3.1通信系统的一般模型 (3) 3.2模拟通信系统模型和数字通信系统模型 (3) 3.2.1 模拟通信系统模型 (3) 3.2.2 数字通信系统模型 (4) 3.3模拟通信和数字通信的区别和优缺点 (5) 4. 通信系统的仿真原理及框图 (8) 4.1模拟通信系统的仿真原理 (8) 4.1.1 DSB信号的调制解调原理 ...................... 错误!未定义书签。 4.2数字通信系统的仿真原理 (9) 4.2.1 ASK信号的调制解调原理 (9) 5. 通信系统仿真结果及分析 (11) 5.1模拟通信系统结果分析 (11) 5.1.1 DSB模拟通信系统 (11) 5.2仿真结果框图 (11) 5.2.1 DSB模拟系统仿真结果 ........................ 错误!未定义书签。 5.3数字通信系统结果分析 (12) 5.3.1 ASK数字通信系统 (13) 5.4仿真结果框图 (13) 5.4.1 ASK数字系统仿真结果 (13) III
中国历史上重大事件时间(整理后)
中国 一、原始社会(约170万年前到约公元前21世纪) 约0.5-0.7万年前河姆渡、半坡母系氏族公社 约0.4-0.5万年前大汶口文化中晚期,父系氏族公社 约4000多年前传说中的炎帝、黄帝、尧、舜、禹时期 二、奴隶社会(公元前2070年到公元前476年) 夏公元前2070年到公元前1600年 商公元前1600 年到公元前1046年 西周公元前1046年到公元前771年 春秋公元前770年到公元前476年 三、封建社会(公元前475年到公元1840年) 战国(公元前475年到公元前221年) 公元前356年商鞅开始变法 秦(公元前221年到公元前206年) 公元前221年秦统一,秦始皇确立郡县制,统一货币、度量衡和文字 公元前209年陈胜、吴广起义爆发 公元前207年巨鹿之战 公元前206年刘邦攻入咸阳,秦亡 公元前206年—公元前202年楚汉之争 西汉(公元前202年到公元8年) 公元前202年西汉建立 公元前138年张骞第一次出使西域 公元8年王莽夺取西汉政权,改国号新东汉(25年到220年) 25年东汉建立 105年蔡伦改进造纸术 132年张衡发明地动仪 184年张角领导黄巾起义 200年官渡之战 208年赤壁之战 三国(220年到280年) 220年魏国建立 221年蜀国建立 222年吴国建立 263年魏灭蜀 265年西晋建立,魏亡 西晋(265年到316年) 280年东晋灭吴 316年匈奴攻占长安,西晋结束东晋(317年到420年) 317年东晋建立 383年淝水之战 南北朝(420年到589年) 420年南朝宋建立 隋(581年到618) 581年隋朝建立 589年隋统一南北方 605年开始开通大运河 611年隋末农民起义开始 唐(618年到907年) 618年唐朝建立,隋朝灭亡627年-649年贞观之治
点对点通信实验步骤2017
基于CAsyncSocket类的点对点通信客户机创建流程 ●通信流程: 1.服务器点击“监听”按钮开始监听,实现Create和Listen函数 2.客户机点击“连接”按钮进行连接,实现Connect函数 3.服务器端接受连接,并触发onAccept事件,实现函数Aeecpt 4.客户端或者服务器端点击“发送”按钮,发送文本框的数据 5.服务器端或者客户端接收数据,OnReveive事件被触发,实现函数Receive 6.客户端或者服务器端点击“断开”,执行函数close,触发另一端的onClose 事件 自定义类获取对话框指针的方法 1.先在CMyDialog.cpp中声明一个全局变量CMyDialog* pDlg; 2在OnInitDialog()初始化的时候,pDlg = this; 3.在自定义类使用的时候,在自定义的类的Cpp中添加extern CMyDialog* pDlg; 4.在自定类中使用pDlg->yourfunction(); ●编程过程: 客户端: 1、创建MFC应用程序,勾选windows socket选项,如创建工程名为client,自动创建类 CClientAPP和CClientDlg,并生成相应的源文件(.cpp)和头文件(.h)。APP代表应用程序。 Dlg代表对话框 2、布置界面如下图所示
3、建立类向导,给文本编辑框,列表框定义变量名及类型 4、插入基于CAsyncSocket的类,如取名clientsock,确定后类视图下右键单击类并载入虚函数onReceive(),onClose(),如果是服务器端还要加载onAccept 5、程序的各个类之间建立联系,具体步骤: 5.1对话框界面与套接字建立连接。在ClientDlg.h文件中将“clientsock.h”文件包含进来,使其能够访问套接字,代码为#include”clientsocket.h”;并添加成员变量m_clientsock,代码clientsock m_clientsock;
点对点数字通信系统设计说明
通信原理三级项目 班级:通信工程2班 姓名: 学号: 指导教师: 教务处 2016年 5月
远距离点对点数字通信系统设计 (燕山大学信息科学与工程学院) 摘要:本文讨论进行了远距离点对点数字通信系统的设计,着重讨论了模拟信号数字化的过程,其中包含了为了提高系统性能进行的信源编码技术和信道编码技术,我采用了HDB3码克服连0问题,利用奇偶监督码和差错重传机制控制误码率。另外,讨论了数字调制技术的实现,本文采用最小频移键控调制和解调技术,并讨论了在高斯白噪声信道条件下的此方法的可靠性和有效性。 关键词:脉冲编码调制,HDB3码,奇偶监督码,MSK调制,高斯白噪声,MATLAB 仿真
目录 1.通信系统概述 (3) 1.1一般通信系统模型 (3) 1.2数字通信系统模型 (4) 1.3远距离语音通信系统 (4) 2.信号数字化 (5) 2.1信号的抽样 (5) 2.1.1抽样定理 (5) 2.1.2脉冲幅度调制PAM (5) 2.2信源编码 (7) 2.2.1十三折线法 (7) 2.2.2脉冲编码调制PCM (9) 2.3信道编码 (10) 2.3.1 HDB3码 (10) 2.3.2奇偶监督码 (11) 3.调制与解调 (11) 3.1 MSK调制 (11) 3.1.1 MSK调制原理 (12) 3.1.2 MSK调制 (13) 3.2 MSK解调 (14) 4.信道描述 (15) 5.系统总体设计 (16) 附录 MATLAB实现代码 (17)
1.通信系统概述 1.1一般通信系统模型 一般作为一个通信系统都由发送端和接收端两部分组成,而发送端则分为信息源和发送设备两部分,接收端与其对应的有接收端和受信者两部分,发送端和接收端之间则是我们信号传输所需要经过的信道,信号在信道中传输时会有噪声的混入,这也是我们的通信系统性能讨论的终点。 图1-1 一般通信系统 信息源是把各种原始消息转换成原始电信号的设备,它通过各种物理转换的方法从自然界中采集信息并把它们转换成相应的电信号,从而便于我们通过电子设备对其进行进一步的处理。受信者则是把接受到的电信号还原成自然界中信息的设备。 发送设备是通过对采集到的原始电信号进行一系列的处理把它变成适合于远距离传输的信号。在模拟传输系统中包括放大、滤波、模拟调制等过程;在数字传输系统中则包含编码、加密、数字调制等过程。接收设备则是上述过程的逆过程,将信道中传输的信号还原成易于处理的直接电信号。 信道是从发送设备到接收设备之间信号传输的物理煤质,分为无线信道和有限信道两大类,每种信道的特点不同,应用场合也不相同。 噪声源是笼统的一个说法,它集中表示分布于通信系统中的各处的噪声。
毕业设计慧鱼模型.
“慧鱼模型” 三自由度机械手 设 计 小 册 学院:机电工程学院班级:机械设计与制造 指导老师:蔺绍江 姓名:王连海 学号:201030120130
一、概述 (1) 1.1机电一体化技术 (1) 1.1.1机电一体化技术的定义和内容 (1) 1.1.2机电一体化系统组成 (1) 1.2. 慧鱼机器人 (2) 1.2.1慧鱼创意教学组合模型简介 (2) 二、机器人的组成 (3) 2.1组成构件 (3) 2.2慧鱼机器人分析 (6) 2.2.1机器人机构组成 (6) 2.2.2主要成分构成及功能 (7) 2.3. 机器人的工作空间形式 (9) 2.4机器人的机械运动形态和变换控制 (11) 2.5机器人的位移、速度、方向的控制方法 (13)
一、概述 1.1机电一体化技术 1.1.1机电一体化技术的定义和内容 机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。 1.1.2机电一体化系统组成 1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基 础,起着支撑系统中其他功能单元、传递运动和动力的作用。 2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是 检测机电一体化系统工作过程中本身和外界环境有关参量的变 化,并将信息传递给电子控制单元,电子控制单元根据检查到 的信息向执行器发出相应的控制。 3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器 的检测信号和外部输入命令进行集中、存储、计算、分析,根 据信息处理结果,按照一定的程度和节奏发出相应的指令,控 制整个系统有目的地进行。 4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。执行 器是运动部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。 5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械 系统提供能量和动力使系统正常运行。提供能量的方式包括电能、气 能和液压能。
中国与西方历史重大事件时间表
中国的 一、原始社会(约170万年前到约公元前21世纪)约170万年前元谋人生活在云南元谋一带 约70-20万年前北京人生活在北京周口店一带 约1.8万年前山顶洞人开始氏族公社的生活 约0.5-0.7万年前河姆渡、半坡母系氏族公社 约0.4-0.5万年前大汶口文化中晚期,父系氏族公社 约4000多年前传说中的炎帝、黄帝、尧、舜、禹时期二、奴隶社会(公元前2070年到公元前476年) 夏公元前2070年到公元前1600年 公元前2070年禹传予启,夏朝建立 商公元前1600年到公元前1046年 公元前1600年商汤灭夏,商朝建立 公元前1300年商王盘庚迁都殷 西周公元前1046年到公元前771年 公元前1046年周武王灭商,西周开始 公元前841年国人暴动 公元前771年犬戎攻入镐京,西周结束 春秋公元前770年到公元前476年 公元前770年周平王迁都洛邑,东周开始 三、封建社会(公元前475年到公元1840年)
战国(公元前475年到公元前221年) 公元前356年商鞅开始变法 秦(公元前221年到公元前206年) 公元前221年秦统一,秦始皇确立郡县制,统一货币、度量衡和文字公元前209年陈胜、吴广起义爆发 公元前207年巨鹿之战 公元前206年刘邦攻入咸阳,秦亡 公元前206年—公元前202年楚汉之争 西汉(公元前202年到公元8年) 公元前202年西汉建立 公元前138年张骞第一次出使西域 公元8年王莽夺取西汉政权,改国号新 东汉(25年到220年) 25年东汉建立 73年班超出使西域 105年蔡伦改进造纸术 132年张衡发明地动仪 166年大秦王安敦派使臣到中国 184年张角领导黄巾起义 200年官渡之战 208年赤避之战
读书报告之一(现代风险投资组合理论简介).
读书报告之二现代风险投资组合理论简介 孙贞贞吕世超刘伟峰 一、马科维茨投资组合模型介绍 美国经济学家哈里·马科维茨(Harry Markowitz)1952年首次提出投资组合理论(Portfolio Theory),并进行了系统、深入和卓有成效的研究,他因此获得了1990年诺贝尔经济学奖, 主要贡献:投资组合优化计算、有效边界。该理论包含两个重要内容:均值-方差分析方法和投资组合有效边界模型。在证券市场中,马科维茨投资组合理论在实践中被证明是行之有效的,并且被广泛应用于组合选择和资产配置。 从狭义的角度来说,投资组合是规定了投资比例的有价证券的投资方案,当然,单只证券也可以当作特殊的投资组合。人们进行投资,本质上是在不确定性的收益和风险中进行选择。投资组合理论用均值—方差来刻画这两个关键因素。所谓均值,是指投资组合的期望收益率,它是单只证券的期望收益率的加权平均,权重为相应的投资比例。当然,股票的收益包括分红派息和资本增值两部分。所谓方差,是指投资组合的收益率的方差。我们把收益率的标准差称为波动率,它刻画了投资组合的风险。 人们在证券投资决策中应该怎样选择收益和风险的组合呢?这正是投资组合理论研究的中心问题。投资组合理论研究“理性投资者”如何选择优化投资组合。所谓理性投资者,是指这样的投资者:他们在给定期望风险水平下对期望收益进行最大化,或者在给定期望
收益水平下对期望风险进行最小化。另外,对于风险的度量也是人们所关注的。 马考维茨经过大量观察和分析,他认为若在具有相同回报率的两个证券之间进行选择的话,任何投资者都会选择风险小的。这同时也表明投资者若要追求高回报必定要承担高风险。同样,出于回避风险的原因,投资者通常持有多样化投资组合。马考维茨从对回报和风险的定量出发,系统地研究了投资组合的特性,从数学上解释了投资者的避险行为,并提出了投资组合的优化方法。 一个投资组合是由组成的各证券及其权重所确定。因此,投资组合的期望回报率是其成分证券期望回报率的加权平均。除了确定期望回报率外,估计出投资组合相应的风险也是很重要的。投资组合的风险是由其回报率的标准方差来定义的。这些统计量是描述回报率围绕其平均值变化的程度,如果变化剧烈则表明回报率有很大的不确定性,即风险较大。 从投资组合方差的数学展开式中可以看到投资组合的方差与各成分证券的方差、权重以及成分证券间的协方差有关,而协方差与任意两证券的相关系数成正比。相关系数越小,其协方差就越小,投资组合的总体风险也就越小。因此,选择不相关的证券应是构建投资组合的目标。另外,由投资组合方差的数学展开式可以得出:增加证券可以降低投资组合的风险。 基于回避风险的假设,马考维茨建立了一个投资组合的分析模型,其要点为: