HTC XV6800 GPS技术文档

HTC XV6800 GPS技术文档
首先需要明确的一点是,6800没有单独的GPS模块,6800的GPS功能是由高通的MSM7500+部分电路+GPS天线所组成的GPSOne系统,GPSOne是基于CDMA网络的,支持4种模式,分别为:
Standalone –这是单纯的GPS接收模式,不需要接入CDMA网络,单纯地接收卫星信号。
MS Based –接入CDMA网络,利用GPS卫星信号+基站信号(ALFT)进行定位。
MS Assisted –接入CDMA网络,利用GPS信号+基站信号(ALFT)进行定位,同时传送两者的修正数据到服务器,服务器通过对信号强度的判断来进行定位,此时,电话功能可以使用,但是数据服务不可用。
MS Assisted/Hybrid –同上,区别在于数据功能仍然可用。
以上4种模式对应在6800的注册表里是:
[HKEY_LOCAL_MACHINE\SOFTWARE\HTC\SUPL AGPS]
"GPSMode"=dword:00000002
;默认为2
Ok,在明确了以上问题之后,我们接下来看一下6800所使用的定位原理:
位置业务最初来源于美国的911紧急呼叫,国家安全网络可以通过定位起呼用户的位置,快速准确地解决社会治安、紧急救援等突发事件。之后,位置业务逐渐发展完善,可以应用于其他的非公共安全的服务,如车辆调度、位置查询、小孩监护、位置计费、旅游服务等方面,协议体系也日臻完善。
CDMA系统所独有的几个特性,如基站提供的GPS时间、码片时延来确定距离等,可为移动用户提供更丰富的位置业务服务,又可为企业提供更多的商业机会。
迄今为止,位置业务中所用的定位技术分为三种:基于网络的非GPS定位技术,如基于Cellid的定位、增强性前向链路三边定位AFLT、增强观察时间差定位E-OTD等;传统的基于GPS的定位技术,GPS的加入加快了定位的处理和提高了定位精度;基于网络和基于GPS的混合型定位技术,利用网络所获得的信息如基站的信号来补充卫星的不足,同时增加新的网络实体如移动定位中心/定位实体等进一步保证定位的响应时间和精度。
近几年位置业务在国外的发展非常快,美国、日本和韩国的许多运营商如SPRINT、VERISON、KDDI、SKT、KT等在2001年中期已经开始推广该业务,并获得了良好的收益。此外,美国Qualcomm公司已经推出了内嵌定位功能的为IS-95系统服务的MSM 3300和为CDMA 2000 1X系统服务的MSM 5100芯片系列,更为位置业务的快速发展提供了良好的解决方案。能提供位置业务的一个典型的CDMA网络结构是基于PN4747网络参考模型的位置业务组网方式。PN4747协议《Location Services Enhancements》是在美国E-911系列协议如PN3890和PN4288的基础上制定的,是针对位置业务而定义的一个正规性质的文件。包括以下内容:基本概念的定义、基本网络结构的定义、业务概念的定义和消息流程的描述。如LCS、LIR、PQoS、MPC、PDE等网络实体的功能划分以及各种定位的信令流程。此外,PN4747协议中还引入GMPC(Gateway MPC)、HMPC(Home MPC)、VMPC(Visit/Serving MPC)的概念,从而能实现手机漫游时的定位。
具体而言,涉及的实体包括:
移动终端可以是普通的CDMA手机,也可以是本身带GPS接收机芯片的终端。
BTS/BSC/MSC/HLR/SC/SCP/PCF/PDSN,其基本含义及其功能与传统的CDMA网络中的相同。只是为了支持位置业务,各个实体需要增加新的接口和新的处理,这些在后面会陆续谈到。在传统的CDMA网络的基础上新增的实体包括MPC、PDE和LCS Client。
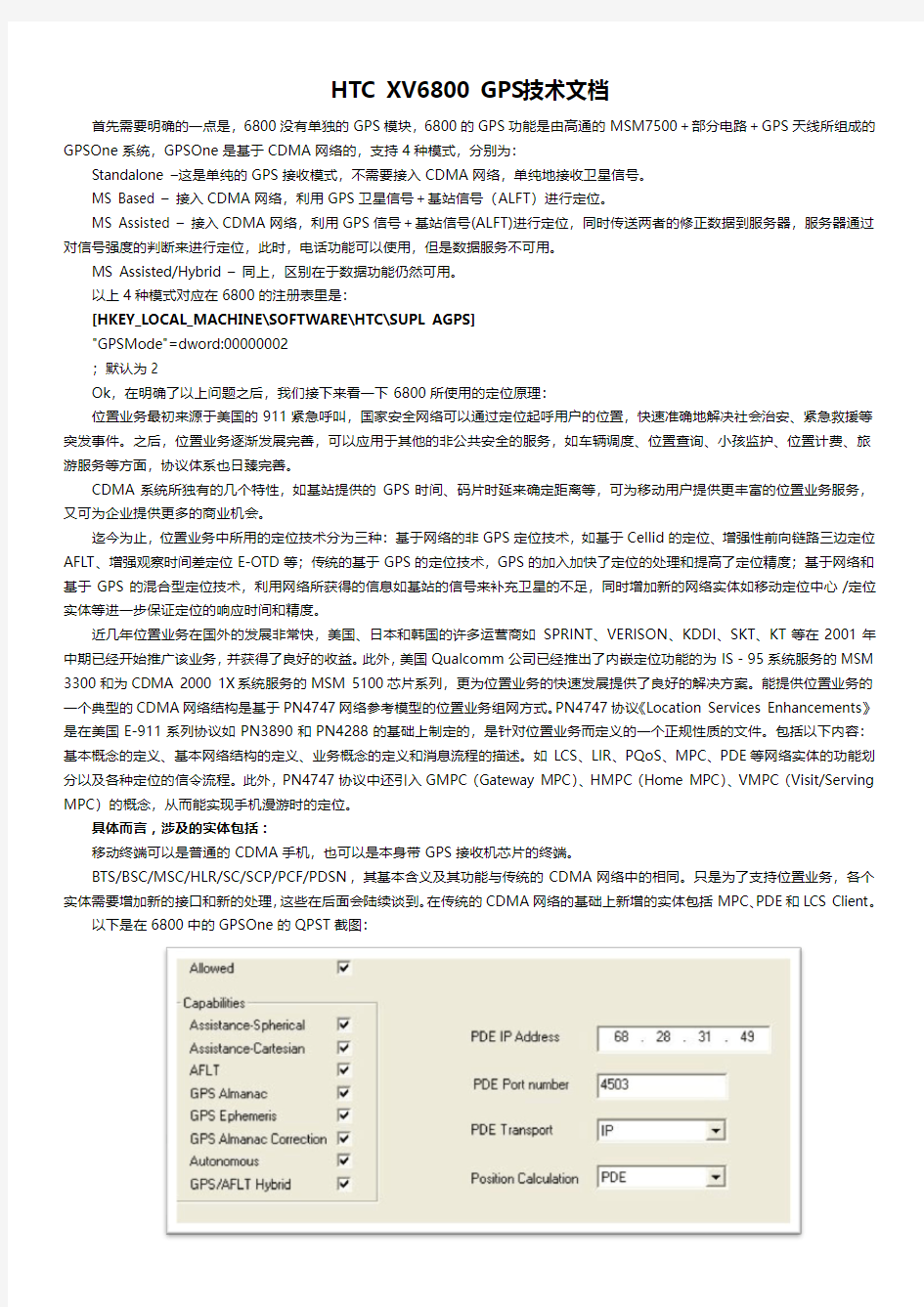
以下是在6800中的GPSOne的QPST截图:
注意:在PDE Transport 里面我这里的设置为”IP”,上面的PDE IP Address是Sprint的服务器地址。如果这里设置为IP的话,6800在开启GPS的时候同时会开启网络拨号,在定位过程中会自动地把GPS信号和基站信号发送到Sprint的服务器,以达到更高的定位精度,但实际上该服务在国内不可用,而且会产生高额的网络费,所以这里的正确设置应该把PDE Transport改为”DBM”,如下图所示:
至于网络上流传的改左边的一些参数设置,其实是没有太大用处的,左边的这列参数只是代表了6800的GPS模块能够支持这些功能,除非你不希望某些功能打开,可以将它屏蔽掉。
它们所对应的解释分别为:
Assistance-Spherical: 辅助圆形坐标
Assistance-Cartesian: 辅助椭圆形坐标(笛卡儿坐标)
AFLT:辅助定位(利用三角基站进行定位)
GPS Almanac & GPS Ephemeris: GPS星历
GPS Almanac Correction: GPS星历校正
Autonomous: 自动校准
GPS/AFLT Hybrid: GPS和AFLT 混合模式
接下来,我们来了解一下什么是P.D.E:
PDE的英文全称是”Position Determining Entity”, 定位实体
PDE的主要功能:当收到MPC的位置请求时,PDE与MSC、BSC以及MS等相关设备交换信息,利用各种测量信息和各种数据通过特定的算法完成具体的定位计算,并将最后的计算结果报告给MPC。
它的主要特点包括:
* 它是与具体定位技术相关的网络单元,在位置业务网络中通过该网络实体来确定MS的位置。
* 每一个PDE能支持一种或多种定位技术,如增强型前向链路三边定位法AFLT或者增强型观察时间差法E-OTD等定位技术。
* 每一个PDE都服务某一个特定的覆盖区域,但不同PDE的服务区域可能存在重叠现象。即多个使用相同定位技术或者使用不同定位技术的PDE都可能服务某一个MPC所覆盖的区域。
* PDE需要内置GPS接收机用以监控卫星信号,一方面用于自身对MS的位置的计算。同时,还可以将所获得的包括天文历表、日历等在内的信息传送给MS,从而帮助具有一定定位功能的MS更快更精确的定位。
* PDE通过SS7信令网与MPC和MSC直接相连。
* PDE不能通过空中接口直接与MS进行交互,必须通过BTS/BSC/MSC作为中间传递者进行间接的交互,互相遵
循IS801协议。
* PDE与MPC之间主要是位置请求消息和位置响应消息的交互。
* PDE与MSC之间交互的消息里主要包含各种PDE或者MS用于位置计算的测量信息和数据。消息格式、消息内容以及消息传输的格式都必须遵循IS801协议。
6800默认的就是P.D.E定位方式,联想到不少网友说某些地区6800无法定位,请这些的确的网友帮忙证实一下,该地区的CDMA 组网方式是否支持IS801协议或SS7通信指令,如果不支持的话,那该地区可能就无法定位了,跟卫星信号无关,跟当地CDMA组网方
式有关。
另外在Position 这里面还有一个Mobile方式,我们一起来了解一下吧:
移动定位中心(MPC-Mobile Position Center)
MPC的主要功能:定位操作处理流程的控制管理中心和位置信息的控制管理中心。具体表现在:
* 网关功能,负责位置信息的获取、传递、存储及控制。接收来自SCP、SC、ESME或LCS Client等使用位置信息的应用实体的定位请求,进行必要的处理后将请求发送给PDE,接收PDE提供的定位结果,再将定位结果发送
给SCP、SC、ESME或LCS Client等应用实体。
* 同时支持SS7和TCP/IP两种接入方式。
* 具有SS7到IP之间的协议转换功能。
* 一个MSC只能与一个MPC相连,但一个MPC能同时服务于多个MSC。一个PDE只能与一个MPC
* 通过SS7信令网与HLR交互,确定移动台当前的服务MSC和用户权限等相关属性,从而选择合适的PDE进行定位操作。
* 存储用户的LIR 模式的有关信息,进行隐私安全方面的控制与管理。
* 通过SS7信令网与PSTN、SC(短消息中心)、SCP,可以提供不同领域的位置业务应用。与PSTN相连可提供与公共安全、紧急特服相关的一些位置业务应用,如911业务、车辆被窃报警业务、小孩丢失报警业务等。与SC相连可提供基于短消息平台的各种位置业务应用,如人员跟踪资产管理业务FAM等。与SCP相连可提供基于智能网平台的各种位置应用,如基于位置的计费LBC、基于位置的呼叫路由选择ECR等。
* 通过TCP/IP协议与各种Internet服务提供商ISP相连,并结合SC、SCP等网络实体,提供更丰富的商业化的基于互连网的位置相关的信息服务。如基于位置的旅游信息服务、黄页号码服务、旅馆餐馆服务、交通信息服务、购物指南服务等。
两者区别在于:
PDE是位置业务网络中利用一定的定位技术和定位算法计算出位置信息的关键部件,它与其它网络实体之间主要通过SS7进行连接。MPC则是整个网络中与位置信息相关的信令的控制点和转接点。MPC与其它网络实体之间不仅要支持SS7连接,同时对于请求位置信息的实体如SCP/SC/LCS Client还需支持TCP/IP连接和SS7-TCP/IP协议之间的转换。
如下图所示:
通过以上的初步探索,我们可以得出以下几个结论:
1)部分地区的无法定位情况可能是存在的(虽然我没有遇到过),问题的关键在于当地的CDMA网络状况,可以尝试一下更改注册表,采用Standalone模式:
[HKEY_LOCAL_MACHINE\SOFTWARE\HTC\SUPL AGPS]
"GPSMode"=dword:00000000
这只是我的一个猜测,目的在于避开当地的CDMA网络,纯粹利用6800的GPS功能进行定位。
大家可以咨询一下当地联通是否支持“定位之星”业务,如果支持的话,应该6800就可以准确定位,如果不支持恐怕就不行。
另外,有兴趣的机油可以测试一下Mobile方式,我没有试过,这个与PDE不同,如果网络支持的话,也可以定位。
2)部分机油开启GPS会有自动拨号的情况,解决这个问题在于修改QPST里面的设置,采用图2的方法设置即可。
3)6800的GPS功能无法与传统GPS相比,虽然技术比较先进,但是鉴于目前国内联通的现状,对其支持的并不好。有消息说联通接下来会大力推广GPSOne业务,即将上市的6900行货版就是一个证明,到时候情况会有所好转也说不定。
附GPS模块部分的相关注册表:
[HKEY_LOCAL_MACHINE\SOFTWARE\HTC\SUPL AGPS]
"EnableGPSSmartMode"=dword:00000001
"ServerPort"=dword:00001E6C
"ServerIP"="195.207.101.126"
"QosPerformance"=dword:00000059
"QoSAccuracy"=dword:00000032
"TimeBetweenFixes"=dword:00000001
"NumberFixes"=dword:3B9AC9FF
"GPSMode"=dword:00000002
"EnableAGPS"=dword:00000001
[HKEY_LOCAL_MACHINE\SOFTWARE\OEM\PhoneSetting\LocationSetting]
"ServiceDescExt"="but will not hide your general location based on the cell site serving your call. No
application or service may use your location without your request or permission. GPS enhanced 911
is not available in all areas."
"ServiceDesc"="Turning location on will allow the network to detect your position using GPS
technology, making some Sprint PCS applications and services easier to use. Turning location off will
disable the GPS location function for all purposes except 911,"
"ItemMessageDesc2"=""
"ItemValue2"=dword:00000003
"ItemName2"="OFF"
"ItemMessageDesc1"=""
"ItemValue1"=dword:00000000
"ItemName1"="ON"
"ItemCount"=dword:00000002
"ServiceTitle"="Phone: Location Setting"
"ServiceName"="Location Setting"
[HKEY_LOCAL_MACHINE\SOFTWARE\HTC\Camera\General]
"MaximalGPSInitialTime"=dword:00000708
"PositionMaximalAge"=dword:00000002
"MeteringMode"=dword:00000000
[HKEY_LOCAL_MACHINE\SOFTWARE\HTC\Camera\Image]
"GpsSaveFolder_0409"="My POI"
"GpsPrefixString"="GPS"
[HKEY_LOCAL_MACHINE\Services\GPSDaemonService]
"Index"=dword:00000001
"Prefix"="GPC"
"Keep"=dword:00000001
"Order"=dword:00000009
"Description"="Services PPP events on behalf of GPS"
"DisplayName"="GPS Daemon Service"
"Dll"="GpsDaemonService.dll"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate Driver]
"OldLogFile"="\\windows\\GPSLogFileBack.txt"
"CurrentLogFile"="\\windows\\GPSLogFile.txt"
"IsEnabled"=dword:00000001
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate Driver\Multiplexer] "DriverInterface"="COM4:"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate
Driver\Multiplexer\ActiveDevice]
"Index"=dword:00000004
"Prefix"="COM"
"Dll"="GPSID_QCT.dll"
"Context"=dword:12344160
"Flags"=dword:00000002
"Keep"=dword:00000001
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate Driver\Drivers] "SleepOnNoData"=dword:000003E8
"RetryWaitOnError"=dword:00000003
"OutputBufferSize"=dword:00001000
"InputBufferSize"=dword:00001000
"CurrentDriver"="GPSOneDevice"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS IntermediateDriver\Drivers\GPSOneDevice] "Version"=dword:00000001
"PollInterval"=dword:000001F4
"DriverName"="TAI"
"FriendlyName"="QualCommGpsOne Card, version 0.0"
"InterfaceType"="POLL"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS IntermediateDriver\Drivers\GPSOneEmulate] "Filex"="\\windows\\GPSOneFileSimulation.txt"
"FriendlyName"="QualCommGpsOne File, version 0.0"
"InterfaceType"="File"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate Driver\Drivers\GPSOnePort] "CommPort"="COM1:"
"FriendlyName"="QualCommGpsOne Card, version 0.0"
"InterfaceType"="COMM"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS Intermediate Driver\Multiplexer] "DriverInterface"="COM4:"
[HKEY_LOCAL_MACHINE\System\CurrentControlSet\GPS IntermediateDriver\Multiplexer\ActiveDevice] "Index"=dword:00000004
"Prefix"="COM"
"Dll"="GPSID_QCT.dll"
"Context"=dword:12344160
"Flags"=dword:00000002
"Keep"=dword:00000001
[HKEY_LOCAL_MACHINE\Drivers\Active\36]
"Hnd"=dword:0005AFF0
"Name"="GPS1:"
"Key"="Drivers\\BuiltIn\\VirtCOM_GPS1"
"BusParent"=dword:000322E0
"InterfaceType"=dword:00000000
"BusName"="BuiltInPhase1_0_8_0"
[HKEY_LOCAL_MACHINE\Drivers\Active\59]
"Hnd"=dword:00AFBAB0
"Name"="GPD0:"
"Key"="Drivers\\BuiltIn\\GPSID"
"BusParent"=dword:000322E0
"InterfaceType"=dword:00000000
"BusName"="BuiltInPhase1_0_53_0"
[HKEY_LOCAL_MACHINE\Drivers\Active\60]
"Hnd"=dword:00AFCB60
"Name"="COM4:"
"Key"="SYSTEM\\CurrentControlSet\\GPS Intermediate Driver\\Multiplexer\\ActiveDevice"
[HKEY_LOCAL_MACHINE\Drivers\BuiltIn\GPSID]
"IClass"="{A32942B7-920C-486b-B0E6-92A702A99B35}"
"Dll"="GPSID_QCT.dll"
"Flags"=dword:00000002
"Context"=dword:00000000
"Index"=dword:00000000
"Prefix"="GPD"
"Keep"=dword:00000001
"Order"=dword:00000010
[HKEY_LOCAL_MACHINE\Drivers\BuiltIn\VirtCOM_GPS1]
"DevConfig"=hex:20,00,00,00,05,00,00,00,10,01,00,00,00,4B,00,00,00,00,08,00,00,00,00,00,00 "FriendlyName"="Virtual GPS1"
"DeviceType"=dword:00000000
"Order"=dword:00000003
"DeviceArrayIndex"=dword:00000000
"Index"=dword:00000001
"Prefix"="GPS"
"Dll"="VIRSER_GPS.dll"
大学生创新创业项目报告全息投影智能交互系统的语音、体感交互专业技术
大学生创新创业项目报告-全息投影智能交互系统的语音、体感交互技术
作者: 日期:
校内编号 石家庄铁道大学 大学生创新创业训练计划项目申请表 项目名称:全息投影智能交互系统的语音、体感交互技术 申请人:黄城 班级及学号:信1306 20132996 申请级别:□校级□省级□国家级 申请类别:□仓噺训练□仓U业训练□创业实践 推荐单位:石家庄铁道大学信息科学与技术学院 指导教师:王正友、段淑凤 填表日期:2015年4月14日 石家庄铁道大学教务处制
填表说明 1各项内容必须实事求是,表达明确严谨,简明扼要。严格按照规定格式填写,对于填写不符合要求,内容含混不清,不予受理。 2、鼓励跨学院跨学科组建项目团队,团队成员应有明确的分工并相互协作,但申请人必须在所属院系申请。 3、项目编号不填写,申请级别和类别在相应位置打"即可,所属门类按照“中 华人民共和国学科分类与代码简表(国家标准GB/T 13745-2009) ”填写。项目级别分国家、省和校级,项目类别分为以下三类: (1)创新训练项目:学生个人或团队根据个人或团队成员的学科知识基础和兴趣,在导师指导下完成实验系统开发、实验项目设计、产品设计、发明制作、软件开发、或社会调查等创新性训练项目内容,并自主完成项目设计、研究条件准备和项目实施、数据处理与分析、研究报告撰写、成果(学术)交流等工作。 (2)创业训练项目:本科生团队,在导师指导下,团队中每个学生在项目实施 过程中扮演一个或多个具体的角色,完成编制商业计划书、开展可行性研究、模拟企业运行、参加企业实践或进行一定程度的验证试验、撰写创业报告等工作。 (3)创业实践项目:本科生团队在学校和企业指导教师共同指导下,利用前期 创新训练项目的研究成果,提出一项具有市场前景的创新性产品或者服务,以此为基础开展创业实践活动。创业实践项目要面向市场展开,按企业实际运营模式进行管理和实践。 4、用A4纸打印,左侧装订,页面不足可加页。一式三份,经指导教师审核,由 项目管理单位组织专家评选排序后,签署意见,加盖单位公章后,交教务处实践教学办公室(可用一份上签署意见后再复印盖章),获批立项以通知或合同为准。
CE傻瓜教程全九课
CE傻瓜教程一:基本操作 先简单介绍下什么叫CE,CE的全称是Cheat Engine,最新的版本是(作者是 Dark Byte)CE是目前最优秀的游戏修改器,不是之一,这个工具绝对值得你去学习(只要花一点时间就够了)。 忘记金山游侠,GM8,FPE之类的修改工具的吧,CE会让你爱不释手。 一、先下载CE ,这个汉化版相当不错哦(不需要安装),推荐各位下载使用。 二、打开CE目录下的2个文件: 三、附加进程(图示): CE傻瓜教程二:精确数值扫描
接着第一关的操作 按下一步进入教程第二关,需要扫描的精确数值是100 现在开始搜索精确数值 100 数值中输入100点击首次扫描按钮 一般游戏就是4字节,这里不需要改动,默认就好。 这次扫描我们得到 59 个结果,里面肯定有我们要找的那个血值,不过好像太多了。
关键一步:回到 Tutorial 点击打我按钮,此时血值已有变化了: 我们再输入 96 点击再次扫描按钮结果只剩1个(这就是我们要找的),我们双击此地址将其添加到地址栏: 只有1个结果了,这个就是我们要找的内存地址,双击将其加入到地址栏
图示操作: 把 95 改成 1000 点击确定按钮
此时教程的下一步按钮变成可用 闯关成功。 操作虽然简单,但是大家需要明白这其实是一个筛选的过程,这样操作就能把地址找出来。本关的小技巧: 1、双击下图对应位置可快速更改数值。 2、双击地址可快速将其加入到地址栏 CE傻瓜教程三:未知初始数值 第3关的密码是 419482
这一关很重要,因为某些游戏中血显示的不是数字而是血条,这样的话教程2中的方法就失效了。 本关就你要教会你如何修改这些讨厌的未知数 此时点击新扫描然后选择未知初始数值 点击首次扫描然后出现了肯定是N多的结果,因为太多了,CE没有显示出来。 老办法,回到 Tutorial ,点击打我 ,CE会告诉你血量减了多少,比如-1
(完整版)不懂交互设计中的体感交互的话,奉劝您考研还是别考交互设计了
不懂交互设计中的体感交互的话,奉劝您考研还是别考交 互设计了 设计史论前方提醒:3388字| 需花费您9分钟 全新的交互模式正占领我们生活、饮食的方方面面。冰箱、面包机、食谱早已不单是一件古董产品,摇一摇,轻轻敲击等简单的手势,就可以完成交互。在你还没有意识到的时候,智能交互化已经在家居生活方式、创新体验餐厅都得到显现,他们都已经将交互设计融入到用户体验和产品服务之中,已经成为你做出消费决策时,至关重要的因素。正因如此,在设计考研中,尤其是工业设计考研大潮中,有很大一批考生是冲着交互设计这一专业来的,其中不乏众多跨专业考生。那么你在决定考交互设计之前,是否有对交互设计做了足够多的了解。本期文章,史论君给大家介绍一下交互设计中的体感交互。设计史论陪您设计考研体感交互(Tangible Interaction)作为新式的、富于行为能力的交互方式正在转变人们对传统产品设计的认识,探究新型的行为方式。体感交互是一种直接利用躯体动作、声音、眼球转动等方式与周边的装置或环境进行互动的交互方式。相对于传统的界面交互(WIMP),体感交互强调利用肢体动作、手势、语音等现实生活中已有的知识和技能进行人与产品的交互,通过看得见、摸得
着的实体交互设计帮助用户与产品、服务以及系统进行交流。那么下图中的手机乒乓游戏曾风靡一时,它的界面模拟了现实生活中的球桌、球拍,用户通过触摸屏幕控制球拍和乒乓球,改变移动的速度的方向即可改变发球力度和方向。刚接触这个游戏的用户并不能很好地掌握游戏技巧,需要进行一定的学习和摸索。而Kinect sports则与之相反,它通过体感技术捕捉用户的肢体动作、手势,很好地模拟了现实生活中的场景。用户直接用自己原来熟悉的技巧就可以很好地掌控游戏。史论君和大家分享一些精彩的体感交互设计案例让你对体感交互设计有一个全面的认识深入体会下体感交互设计在生活工作中都带来的趣味性、实用性。Xbox ONE 游戏机上图中是目前非常流行的微软(Microsoft)公司出品的Xbox ONE游戏机的一系列体感游戏。玩家需要调动全身的动作进行游戏,使自己真正进入游戏情景。不同的游戏需要不同的身体动作进行控制。 智能“魔镜”上图案例展示了一种全新的试衣体验。这种试衣镜利用增强现实(augmented reality,AR)和微软Kinect 体感外设两种先进的技术实现虚拟试衣,消费者无需试穿就能看到真实的试衣效果。智能驾驶控制系统这是宝马汽车iDrive系统(智能驾驶控制系统)中的手势识别功能,它通过3D传感器检测手势动作,以直观便捷的方式控制信息
体感交互设备资料
体感交互设备资料 1、一类体感交互设备(采用惯性感测、主要特征:有手持设备无无摄像头):利用无线信号与游戏主机连结,采用指向定位及动作感应。前者就如同光线枪或鼠标一般可以控制萤幕上的光标,后者可侦测三维空间当中的移动及旋转,结合两者可以达成所谓的“体感操作”。 主要的代表产品有:任天堂推出的“Wii Remote”(2006)、速位互动推出的“CyWee”(2008)。 该类产品核心原理:通过无线信号进行手持设备定位,然后在手持设备内置固态加速计和陀螺仪,实现3D空间体感感测。 速位互动公司介绍:由软银中国风险投资(SBCVC)与台湾工业技术研究院(ITRI)共同于2007年合资创立,核心技术为无线影音传输技术、体感技术解决方案、脸部识别技术。产品方面有3D感应控制器、智能电视遥控器、WiMo高清无线影音适配器。
2、二类体感交互设备(采用惯性感测+光学感测、主要特征:摄像头+手持定位设备):采用红外摄像头发射红外光,经手持设备进行定位,通过3D空间的感测来实现“体感操作”。 主要的代表产品有索尼推出的“PS MOVE+PS EYE”(2010)、北京永利宁科技推出的“VirTouch”(2012)、深圳泰山科技推出的“爱动体感运动机”(2011)。“PS MOVE+PS EYE”:PS Move在三维空间中的定位是依靠其顶部光球实现的,光球距离摄像头越远,其投射到摄像头中的图像面积就越小,根据图像的大小可以精确计算其与摄像头之间的距离变化,从而确定其在三维空间中的准确坐标。PS MOVE手柄内部有一个三轴陀螺仪,一个三轴加速以及一个地球磁场感应器,再加上PSEYE的空间定位,从而将MOVE手柄的任何操作细节1:1地还原到游戏中。同时PS MOVE的动作感应运算是由CELL处理器中的一个SPE协处理器负责。Move手柄是通过蓝牙2.0传输操作信号。 VirTouch核心工作原理:通过红外LED光源发射红外光,经过手指上戴的指环反射(指环外圈镶嵌玻璃、内圈有红外反射涂层),用装有可见光滤波片(滤掉可见光、透过红外光)的摄像头捕捉红外线,产生控制器的输入信号。指环的作用有二:1、反射红外光,2、以其圆心为识别点,可以精确识别单点输入的信号;重要的是,此方案可以形成三维输入,识别上下左右与景深程度。
(完整版)cadence PCB 画图(傻瓜教程快速入门)
cadence 画 PCB 板傻瓜教程(转帖) 复制于某网站,谢谢。拿出来分享吧,希望对初学者能有帮助,可以很快了解 Cadence 的使用,谢谢共享者。 一.原理图 1.建立工程 与其他绘图软件一样,OrCAD 以Project 来管理各种设计文件。点击开始菜单,然后依次是所有程序—打开 cadence 软件—》一般选用 Design Entry CIS,点 击Ok 进入Capture CIS。接下来是 File--New--Project,在弹出的对话框中填入工程名、路径等等,点击 Ok 进入设计界面。 2.绘制原理图 新建工程后打开的是默认的原理图文件 SCHEMATIC1 PAGE1,右侧有工具栏,用 于放置元件、画线和添加网络等等,用法和 Protel 类似。点击上侧工具栏的Project manager(文件夹树图标)或者是在操作界面的右边都能看到进入工程管 理界面,在这里可以修改原理图文件名、设置原理图纸张大小和添加原理图库 等等。 1)修改原理图纸张大小: 双击 SCHEMATIC1 文件夹,右键点击 PAGE1,选择 Schematic1 Page Properties,在 Page Size 中可以选择单位、大小等; 2) 添加原理图库: File--New--Library,可以看到在 Library 文件夹中多了一个 library1.olb 的原理图库文件,右键单击该文件,选择 Save,改名存盘;(注意:在自己话原 理图库或者封装库的时候,在添加引脚的时候,最好是画之前设定好栅格等参数,要不然很可能出现你画的封装,很可能在原理图里面布线的时候通不过, 没法对齐,连不上线!) 3)添加新元件: 常用的元件用自带的(比如说电阻、电容的),很多时候都要自己做元件,或 者用别人做好的元件。右键单击刚才新建的 olb 库文件,选 New Part,或是New Part From Spreadsheet,后者以表格的方式建立新元件,对于画管脚特多的芯片元件非常合适,可以直接从芯片 Datasheet 中的引脚描述表格中直接拷贝、粘贴即可(pdf 格式的 Datasheet 按住Alt 键可以按列选择),可以批量添加管脚,方便快捷。 4)生成网络表(Net List): 在画板 PCB 的时候需要导入网络表,在这之前原理图应该差不多完工了,剩下 的工作就是查缺补漏。可以为元件自动编号,在工程管理界面下选中.dsn 文件,然后选 To ol s--A n n o t a te,在弹出的对话框中选定一些编号规则,根据需求进行修改 或用默认设置即可。进行 DRC 检测也是在生成网络表之前的一项重
傻瓜式开展培训规划工作完整版
傻瓜式开展培训规划工 作 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
傻瓜式开展年度培训规划工作 又到了一年一度的开展年度培训规划工作的时刻了。人力资源部作为公司的培训管理组织者,又需要耗费脑汁去琢磨怎么做好这项工作。这里面,有培训体系完善的企业,也有没有任何培训体系根基的企业;有十分专业的HR,也有菜鸟级的新手;有富的流油的预算支持的培训费用,也有捉襟见肘无米下锅的培训费用…… 不同条件可以采用不同的培训规划方案,但是笔者根据多年的培训规划经验简单的分享一种傻瓜式的开展年度培训规划工作的方法步骤,有兴趣的朋友可以借鉴来做。 首先弄清楚几个基本的定义与要求: 1、年度培训规划必须依据公司拨付给你的年度培训预算来进行组织开展,在预 算范围内合理开展各项培训;同时也可以在年度培训规划中简单分析明年培 训费用使用的情况、结构比例,比如:新员工培训费用占了多少、营销人员 的培训费用占了多少,管理者的培训费用占了多少等; 2、年度培训规划的开展必须有两个必不可少的步骤:首先开展年度培训需求分 析,形成年度培训需求分析报告;然后据此制定年度培训计划; 3、年度培训计划最后必须形成表格,表格栏目的要素必须包括:部门名称、课 程名称、课程主要内容、对应的课程课时、对应课程讲师姓名、对应课程费 用、培训课程开展拟安排的时间、参训人数; 4、年度培训计划的课程时间原则上不建议确定具体的日期,因为在今年年底确 定明年课程的具体时间毫无意义,中间不可控因素太多,但必须确定到每月 的上中下旬,同时注意错开节假日、公司固定的会议和活动时间; 5、年度培训计划必须填写每门课程的参训人数,这个数据是预测、分析公司、 各部门的人均课时数的关键,一个学习型组织,它一年的人均课时不能低于 40小时,低于40个小时说明培训力度太小,大家没有机会学习,高于300 个小时说面培训力度太大,会影响工作。
体感互动系统
体感互动系统 体感互动的含义 体感互动操作系统采用了先进的计算机视觉技术和光影捕捉技术。在该系统下,随着体验者肢体运动、画面做出相应的变化,产生各种影像,体验者随即进入一种虚实融合的奇妙世界。互动内容可根据应用场合、客户需要进行编程,更换方便,也可将影像区域扩大到任意所需的尺寸,以增强娱乐的效果。 全方位支持玩家自定义体感模式,它包含与Wii一样的横条感应器和一副左右手柄,凭借PC与类似于wii的动作感应手柄方案。可编程动作感应平台完美兼容Wii手柄,利用Wii 手柄的无线设计,配合陀螺仪和内置加速器,通过人体动作替代传统人机输入设备遥控电脑。睿云科技在这个领域拥有国内一流的多媒体技术研发实力。 体感技术,在于人们可以很直接地使用肢体动作,与周边的装置或环境互动,而无需使用任何复杂的控制设备。便可让人们身历其境地与内容做互动。 体感技术 举个例子,当你站在一台电视前方,假使有某个体感设备可以侦测你手部的动作,此时若是我们将手部分别向上、向下、向左及向右挥,用来控制电视台的快转、倒转、暂停以及终止等功能,便是一种很直接地以体感操控周边装置的例子,或是将此四个动作直接对应于游戏角色的反应,便可让人们得到身临其境的游戏体验。 其他关于体感技术的应用还包括:3D 虚拟现实、空间鼠标、游戏手柄、运动监测、健康医疗照护等,在未来都有很大的市场。 拿着手柄在电视上打游戏,握着鼠标在电脑网络游戏中厮杀的的游戏方式可能要落伍了。一项新的游戏方式――体感游戏或许将会成为游戏用户的新“宠儿”,它可以不用任何控制器,用肢体动作就可以控制游戏里的玩家,可以让用户更真实的遨游在游戏的海洋中。并且,随着技术的进步,体感技术还可以用在商场的服装店,甚至用户可以在网上随意试穿自己喜欢的衣服。 产品优势 (1)参与者和地面影像显示实时动态组合,影像随观众参与同步变化。 (2)全新的互动广告娱乐新形式,娱乐性强,吸引观众。 (3)时尚的娱乐体验、双向互动,可满足大量人群同时参与。 应用领域 (1)科技馆、规划馆、博物馆、展厅、展览会、企业展厅等。 (2)活动现场、商场、卖场、汽车站、火车站。 (3)报社,电视台,网站等传媒机构。 (4)电玩城,酒吧、迪厅、KTV、舞台、婚庆婚典等。 发展前景 诚然,体感游戏与网络游戏结合并不局限于互联网。可以想象,在未来三网融合完成后,在互联网电视中有可能出现的体感游戏频道所能够带来的用户数量将是多么的庞大,到那时,用户无需花费较高成本额外购买Wii,PS Move, Kinect等游戏主机,只需一台电视机,就可以让用户随时体验体感游戏。
傻瓜式爆吧教程~新人必看!!!
不废话直接进入正题首先下载群共享里的 下载完解压这儿没啥说的。 、 打开WinterLove 嗯。。这就是软件的界面新淫看着一定很蛋疼吧。。不急不急哥一步一步教你 首先。、设置主题。如上图%c5是乱码发帖时会生成5个中文乱码标题重复的话是无法继续发帖的~ 内容同上 贴吧名:《你要爆的贴吧名字例如: sj》挖主题挖精品挖投票挖坟号这些我不建议使用用起来很蛋疼。。。
Id注册登陆。不建议使用安狗的注册功能群共享里有注册软件 更容易使用。。一个IP可注册10个马甲然后断开宽带连接重连就可以继续注册了 这里只说如何登陆。点 然后把ID列表复制粘贴到里面去。。如下图 注:格式一定要账号:密码 一个IP只可登陆38个ID。 然后点批量登陆
下一步 点上图的清空线程 取消自动追加干扰码 然后点发帖开始。就出来验证码了 在这里面输入《验证码识别区》里面的验证码即23mp
输入完就显示发帖成功了 如果被封了、、一定要发帖终止 切记切记!一定要终止否则安狗会自动关闭重连IP: 断开 然后连接。然后开始发帖就可以继续了。
顺便发下常见的错误: case 12: message = "您的帐号由于违规操作而被封,目前无权限进行该操作。"; break; case 13: message = "您的网络地址由于非法操作被封"; break; case 14: message = "您发布的贴子已经存在"; break; case 15: message = "请不要发表含有不适当内容的留言
请不要发表广告贴"; break; case 38: message = "验证码超时,请重新输入"; case 40: message = "验证码输入错误,请您返回后重新输入"; 还有有什么不懂的群里问~ 军团刚建发展需要大家的努力~ 希望大家在幽灵军团玩的开心~ 某灭参上~~~
巧用体感交互技术,创新信息化课堂教学思维.docx
巧用体感交互技术,创新信息化课堂教学思维 第 1 章背景介绍 1.1体感交互技术的发展 体感交互技术成为21 世纪最重要的人机交互模式。通过对虚拟现实的不断创新,有学 者们生活的方方面面都在慢慢的向着高科技的方向发展,在传统的教育方式上更是显示出了 深刻的改变。“体感+教育”模式中,体感操作通过人的肢体语言来将信号传递给采集模块 来实现相关动作变化的。体感技术的兴起必将在教育领域中起到引领作用,新的教育模式将 会使教育发展的浪潮推向另一个顶峰,成为教育发展潮流的航标。未来,更多的体感教学技 术将会被运用在中学课堂当中,实现肢体动作和虚拟世界的交互,让广大师生在虚拟现实的 场景中学习各种知识并强化记忆。 1.2体感交互技术的发展现状 上课是有学者们每个人都会经历的,回顾有学者们的上课时光,有学者们会发现。老 师和同学每天都在上课,但课堂与课堂之间的场面却有不同,往往有两种情况:一是老师 在讲台上激情的讲课,台下的学生全神贯注的投入其中,教与学在一种愉快的氛围中进行;二是老师在台上枯燥的照本宣科,讲课的方式很死板,学生的感觉会很乏味,整个课堂的 氛围是沉闷的。为了改变这种死板的教学方式,同时营造良好的课堂氛围,提高了学生的 学习兴趣,一种带有情景式学习方式的“体感+教育”相关联的教学方式,此方式能够使课 堂效率好时间利用率提高,在能充分满足人们好奇心和求知欲的同时,还打破了空间以及时间 的限制,并培养了学生的想象力以及探索精神。 在新兴起的体感教育模式中,相比较传统教育模式而言,能够让学生直观的感受世界,在每一个实验或是每一个事物运动的过程中,学生能得到一种更立体、更丰富的知识,能够让学生主动的去创新与事物之间联系和与事物之间的运行方式。 1.3体感交互技术发展意义 “体感+教育”教学模式是以教学为目的,教师通过科学设计或选择体感模式和情景,并将它与教学过程整合,使学生在心情愉快、兴奋活跃的一种状态中进行学习的一种教学 活动类型。通过体感教育可以使学生产生更好的学习兴趣,提高学生学习的创新意识,自 主意识,主动意识。在学校的交互式学习可以让学生有更多的机会去亲生体会学习的快乐。 无论是在家庭中还是在校园中都可以进行相对应的教学,增强了学习的趣味性,在进 行相关物理化学实验的过程中,可以先通过体感交互技术进行模拟实验,等熟悉实验过程 以后再进行二次试验,既能让学生熟悉和理解实验现象,还能过避免设备的损坏,减少了 不必要的损失。
一种基于游戏引擎的4D体感交互系统技术方案
一种基于游戏引擎的4D体感交互系统 技术方案说明书
目录 1引言 (1) 1.1编写目的 (1) 1.2背景 (1) 2设计概述 (2) 2.1任务和目标 (2) 2.2需求概述 (2) 2.3系统概述 (2) 3系统详细设计分析 (3) 3.1数据获取识别模块 (3) 3.1.1彩色图形获取 (4) 3.1.2深度图像获取 (4) 3.1.3动作识别 (5) 3.1.4语音识别 (7) 3.2Unity3D接口控制 (7) 3.2.1设备控制 (8) 3.2.2场景显示控制 (8) 3.2.3骨骼跟踪绑定 (9) 3.2.4近景模式绑定 (10) 3.2.5平滑处理 (10) 3.2.6特效事件处理 (10) 5总体方案确认 (11) 5.1系统总体结构图 (11) 5.2系统总体功能图 (12) 5.3系统总体流程图 (12) 5.4系统硬件组成图 (13) 5.5系统开发工具 (14) 5.5.1Kinect开发平台 (14) 5.5.2Kinect系统架构 (15) 5.5.3Kinect SDK (15) 5.5.4Unity3D开发工具 (16)
1引言 1.1编写目的 本文提供一种基于游戏引擎的4D体感交互系统技术方案的说明。本系统包括安装有游戏引擎的计算机、体感装置、力反馈发生装置、特效发生装置等。利用Kinect体感器替代传统游戏的输入外设,克服了对鼠标、键盘或游戏手柄等操作装置的依赖,同时增加了震动和特效反馈装置,将游戏的声音、碰撞等4D特效更加真实地展示,增添体感交互的真实性、带入性;同时削弱了游戏对人体的生理、心理伤害。 1.2背景 游戏产业作为一门新兴的娱乐产业,已经在世界范围内得到迅猛的发展,游戏的形式也越来越丰富,作为其中之一的体感游戏逐渐受到人们的关注。体感游戏一出现就颠覆了游戏单调的操作,使得人机互动的模式展现得更完美。玩家进行游戏时,对游戏的操控性与游戏的代入感的要求也逐渐提高,体感游戏作为一种依托于新技术的游戏,不需要外置的游戏控制器,凭借其操控性以及可玩性得到越来越多的玩家欢迎。 目前,在国内外已经开发的游戏种类很多,但是还没有使用游戏引擎开发过基于游戏引擎的4D体感交互游戏的支持,各别公司也仅仅是提供了一些游戏的展示效果,体感交互系统的开发还十分不成熟。同时,由于体感交互系统不需要外置的游戏控制器,即克服了对鼠标、键盘或游戏手柄等操作装置的依赖,可以减轻因为长时间的鼠标、键盘操作引起的一些生理伤害。如何既能做到放松的娱乐,又能兼顾玩家的生理健康变成为当前发展的新的方向。 本文提出的基于游戏引擎的4D体感交互系统,旨在为未来4D体感游戏的开发提供最新的研究方向,为研究体感游戏的开发者提供研究资料和成果,推动体感游戏在国内的发展,具有创新以及借鉴参考的意义。
Kinect体感交互技术
现代通信理论与先进技术之Kinect体感交互技 术 摘要: 本文通过查阅国内外相关文献,了解了人机交互技术尤其是可以实现高效人机交互的Kinect体感技术的发展方向,并以此为研究基础,综述了Kinect体感技术的理论基础和国内外应用现状,讨论了其广泛应用需要解决的技术难题,展望了其在人机交互领域的应用前景,得出了Kinect体感技术有利于推动人机交互的智能化进展,是人机交互改革的又一个新起点的结论。 关键词:Kinect体感技术;人机交互;虚拟现实;人工智能 引言 继鼠标和多点触摸之后,体感交互被称之为“第三次人机交互革命的原点”。人机体感交互的出现是人与机器对话方式回归自然的重要转折,体现了人们对“以人为中心”设计理念的不断追求。 人机交互[1](Human-Computer Interaction,HCI) 是研究人与计算机及其相互作用的技术,其研究目的在于利用所有可能的信息通道进行人机交流,提高交互的自然性和高效性。目前人与计算机交互的方式只局限于鼠标与键盘,正是由于这种传输方式的单一性阻碍了人机交互的进一步发展,人机交互中输入输出效率之间的差距变的越来越大。随着科学技术的高速发展,更高层次的人机交互理念对交互方式提出了巨大的需求,众多科研人员开始对新的交互技术的多通道界面展开研究,目前的研究内容主要是集中在手势输入、语音识别及感觉反馈等方面。而kinect 体感技术的出现为促进人机交互的发展具有重要意义,kinect 作为新一代的体感设备,可以依靠实时捕捉使用者的动作、面部识别及语音识别就可以达到输入功能。这一特性很好地填补了现有人机交互技术的缺陷,并且促使kinect 体感技术成为人机交互领域的一个研究热点。 与传统输入设备不同的是,kinect 设备可以实现直接用使用者的身体来控制终端,用这种最自然的方式与终端进行交互的特点贴近了人机交互对自然性的要求,kinect 体感技术对人机交互理念的实现起到了重要的促进作用。因此研究kinect体感技术在人机交互领域中的应用对其今后的发展具有很大的必要性。
体感交互的设计原则
1. 放弃网格式布局: 菜单和视觉元素的构建,要考虑到用户操作时的人机工程学 窗口,图标,按钮,指针,是界面的常见构建块。打开电脑,每个软件中都可以看到上述元素,而且都是依据网格线布局模式进行水平和垂直布局。 但倘若如果你加入了手势,你会发现,网格线布局模式非常不好用。因为人类的运动是非常自然的,很少会沿着水平线和垂直线进行直线手势操作。(除非机器人)。而且,还可能出现的问题是遮挡问题,当用户进行手势操作时,很容易手就挡住了屏幕。 NUI交互前例很少,设计师不能从GUI中借鉴,只能不断观察用户的手臂和手势操作。才能构建符合人机工程学的界面。 例如:我们曾经构建了一个“弧度界面系统”,当用户将肘部放在桌子上时,依然能够操作菜单,这样用户就不用抬起手臂操作了,更自然,也更舒服。 当光标悬停在选项时,手势抓取可以用来选择。. 2. 光标能够暗示用户当前位置 手势交互界面主要依赖手和手指来控制屏幕上的物体。同样的,我们需要手势光标来暗示用户当前所处位置。但有时候大可不必使用光标,在我们打造的一款应用中,我们将光标换成了手掌半透明“镜像”。这样用户就知道手对应在界面中的位置了。
半透明光标. 3. 将手放在传感器可以捕捉到的地方——必须要了解“有效交互区域”的概念“ 有效交互区域指的是传感器能够清晰捕捉用户手势交互动作的区域,设计的关键点在于,要将有效交互区域设置在用户容易操作的区域。否则,用户有效操作就需要不断抬起、挪动手臂,非常累。 第二点是要保证用户要在有效交互区域中。不能超出范围。 有效交互区域 4. 三维感 3D照相机为我们提供了很多新机遇,让用户可以更深入的与内容交互。而且,与触摸屏交互和鼠标交互是二维的,没有所谓的Z轴。但是体感类交互,却能提供X-Y-Z三轴。在界面设计上,我们也需要添加相应的反馈。比如说用户想买一双鞋,那么他通过手势交互,就可以在屏幕中抓取这双鞋,然后旋转观赏这双鞋的细节。 对于设计师意味着什么呢?第一,我们的界面需要更强的三维感。第二,三维感可以为人机交互带来更多的趣味性。
HyperMesh傻瓜教程电子版本
H y p e r M e s h傻瓜教程
强度分析 以A380铝支架分析为例: 1.Start license services 双击,进入界面,再点击Start Server,取得软件应用许可,进入Hyper mesh工作界面; 2.选择模块Nastran
双击,弹出对话框,选择Nastran点击OK。点击斜向下的绿色箭 头,进入界面,将已建好的模型导入HyperMesh; 3.选择模型,去实体 选择要分析的模型,点击图标变灰色,隐藏其它模型。点击F2,框选模型(如未选中,模型为壳层),将实体(solid)去掉,只留下壳层(1111)。 ; 4.数模几何清理(auto cleanup 和F11) ,避免两条轮廓线过于接近或夹角太小(小于30度),再进行人工修清理模型曲线,点击F11,进入界面,一般使用下图1、2、5创建点和点之间的线、点垂直于线的线、删除特征线(鼠标左键去掉曲线,右键添加) 去倒角,geom,defeature,surf fillets,find,选中要去掉的倒角面,remove。 5.切法兰面 为了确定零件上与加载点相关联的节点位置,我们在约束(螺栓位置)和加载处切法兰面。 (5.1)找到圆心Geom—circle—find center;常按鼠标左键,在白线上选择三点,点击“find”,出现圆心 (5.2)画圆center&radius 点找到的圆心,输入radius尺寸,点N1,在面上点三个点,点“create" 按住左键选中曲线找到节点, M6的螺栓,法兰半径6.5;M8/8.5,M10/10.5,M12/12.5;
不懂交互设计中的体感交互的话,奉劝您考研还是别考交互设计了
不懂交互设计中的体感交互的话,奉劝您考研还是别考交互 设计了 设计史论前方提醒:3388字| 需花费您9分钟 全新的交互模式正占领我们生活、饮食的方方面面。冰箱、面包机、食谱早已不单是一件古董产品,摇一摇,轻轻敲击等简单的手势,就可以完成交互。在你还没有意识到的时候,智能交互化已经在家居生活方式、创新体验餐厅都得到显现,他们都已经将交互设计融入到用户体验和产品服务之中,已经成为你做出消费决策时,至关重要的因素。正因如此,在设计考研中,尤其是工业设计考研大潮中,有很大一批考生是冲着交互设计这一专业来的,其中不乏众多跨专业考生。那么你在决定考交互设计之前,是否有对交互设计做了足够多的了解。本期文章,史论君给大家介绍一下交互设计中的体感交互。设计史论陪您设计考研体感交互(Tangible Interaction)作为新式的、富于行为能力的交互方式正在转变人们对传统产品设计的认识,探究新型的行为方式。体感交互是一种直接利用躯体动作、声音、眼球转动等方式与周边的装置或环境进行互动的交互方式。相对于传统的界面交互(WIMP),体感交互强调利用肢体动作、手势、语音等现实生活中已有的知识和技能进行人与产品的交互,通过看得见、摸得着的实体交互设计帮助用户与产品、服务
以及系统进行交流。那么下图中的手机乒乓游戏曾风靡一时,它的界面模拟了现实生活中的球桌、球拍,用户通过触摸屏幕控制球拍和乒乓球,改变移动的速度的方向即可改变发球力度和方向。刚接触这个游戏的用户并不能很好地掌握游戏技巧,需要进行一定的学习和摸索。而Kinect sports则与之相反,它通过体感技术捕捉用户的肢体动作、手势,很好地模拟了现实生活中的场景。用户直接用自己原来熟悉的技巧就可以很好地掌控游戏。史论君和大家分享一些精彩的体感交互设计案例让你对体感交互设计有一个全面的认识深入 体会下体感交互设计在生活工作中都带来的趣味性、实用性。Xbox ONE 游戏机上图中是目前非常流行的微软(Microsoft)公司出品的Xbox ONE游戏机的一系列体感游戏。玩家需要调动全身的动作进行游戏,使自己真正进入游戏情景。不同的游戏需要不同的身体动作进行控制。 智能“魔镜”上图案例展示了一种全新的试衣体验。这种试衣 镜利用增强现实(augmented reality,AR)和微软Kinect 体感外设两种先进的技术实现虚拟试衣,消费者无需试穿就能看到真实的试衣效果。智能驾驶控制系统这是宝马汽车iDrive系统(智能驾驶控制系统)中的手势识别功能,它通过3D传感器检测手势动作,以直观便捷的方式控制信息娱乐等功能。 体感交互在医疗中的应用在手术过程中,医生往往需要查一
Kinect体感交互技术的游戏设计与实现
人体交互是一门研究人与计算机通过输入输出设备进行交流互动的技术。随着信息科学技术的发展,人机交互越来越成熟与人性化。目前,人机交互不再像以往的方式依赖输入输出设备,转而以人脸识别、手势识别以及声音等作为人与计算机交流的中间介质,实现沟通与互动。这不但改善了人们对硬件的依赖,增加了用户的参与感,提高了人机交互的自然性和高效性,而且更深层次促进科学技术的研究与发展。其中,Kinect 作为新时代人机交互技术的产物,在人机交互领域带来了革命性的改变。例如,以往的游戏及应用程序借助Kinect 能够摆脱鼠标和键盘,人们只需借助双手或肢体动作即可实现人与机器的互动。本文利用Kinect 体感交互技术、骨骼追踪技术与软件设计相结合,借助微软提供的软件库,即Kinect for Windows SDK ,开发体感交互应用程序,设计相应的游戏软件并实现。设计借助Kinect 体感交互技术的游戏,不仅可以改善人们对硬件的依赖,而且可以让计算机类专业的学生借助Kinect 体验其所写程序的效果,这不但激发了学生的学习兴趣,提升教学的娱乐性,更重要的是,可以让学生们接受到新的科技理念,激发他们的创新意识。 1Kinect 体感技术 1.1Kinect Kinect 设备的结构中拥有三个摄像头[1],依次是红外投影机、彩色摄像头、红外CMOS 摄像头。彩色摄像头主要用于捕捉用户的骨骼数据,追踪用户的骨骼位置信息;两个红外摄像机构成深度检测系统,提供实时的彩色图像和深度数据。此外,Kinect 还有四个 Kinect 体感交互技术的游戏设计与实现 【摘要】体感交互技术是一项直接使用肢体动作与数字设备互动的智能技术。文章以Kinect 数字设备为基础,采用C#语言定义常用人机互动的手势动作,采用3D Max 和Unity3D 搭建场景模型,设计并实现了一款迷宫游戏软件。游戏测试分析表明,该游戏增强了用户的参与感,提高游戏中交互的自然性与高效性。【关键词】Kinect ;体感交互技术;游戏 【doi:10.3969/j.issn.2095-7661.2019.03.011】【中图分类号】TP391.9 【文献标识码】A 【文章编号】2095-7661(2019)03-0039-04 Game design and implementation of Kinect somatosensory interaction technology (黎明职业大学,福建泉州362000) 吴萍萍 Abstract :Somatosensory interaction technology is an intelligent technology that directly uses the interaction between body movements and digital devices.Based on the Kinect digital device,this paper defines the gesture action of human-computer interaction in C#language,builds scene model with 3D Max and Unity3D,and designs and implements a labyrinth game software.The analysis of game test shows that the game enhances the user's sense of participation,and improves the naturalness and efficiency of interaction in the game. Keywords :Kinect;somatosensory interaction technology;game WU Ping-ping (Liming Vocational University,Quanzhou,Fujian,China 362000) [收稿日期][作者简介][基金项目]2019-05-12 吴萍萍(1990-),女,福建泉州人,黎明职业大学信息与电子工程学院实验员,硕士,研究方向:信息处理,图像处理。2017年福建省教育厅中青年教师教育科研项目“基于Kinect 手势识别的体感类教育游戏软件”(项目编号:JAT171086)。 39
傻瓜级菜鸟淘宝标题优化的最简单方案
傻瓜级菜鸟淘宝标题优化的最简单方案 这篇专门写给不会优化标题的人,傻瓜级指导,你看完就能懂!首先请自备淘宝服务“生e经”,没有的也不用专门去订啦,反正找词的方法也很多,这里给大家开个篇,用什么工具找词优化基本也都通用。 ---------------------------------------------------- 首先呐。还是商品本身,商品是什么,大词就是什么,所谓优化啦,长尾啦什么的,都是围绕商品本身来的,也就是说,比如你卖的是手机,那么什么词都是围绕手机来的,智能手机丶安卓手机丶老人手机等的。比如是连衣裙,那么就是围绕连衣裙来,春款连衣裙丶复古连衣裙丶蕾丝连衣裙等等... 我从来不看什么数据,我找词一般都是找跟商品最搭的词。现在我们来开始讲优化。 ---------------------------------------------------- 首先我们要做的,就是检查现在标题里,所能够包含的所有组合关键词,也就是所谓的,标题里包含的所有热搜词。那么这个检查人工或者用软件都可以,我一般就用生意经,大家有其他好工具可以自己去看下。举个例子。生意经里宝贝分析里就有分析你标题里包含的词的功能。 你一眼就能看到。目前能给你带来流量的词千万千万不要动!动了后悔死你。那么大家看如上图,包含26个词和包含260个词完全是两个概念的!所以如果你看过以后,你标题包含的热搜词如果在100个以下,那么先别想别的了,赶紧开始优化吧。 怎么去优化,我该怎么选词?我相信很多同学卡在这里,感觉怎么找都找不对。你试过淘宝下拉框,试过数据魔方,但是你还是不知道该怎么做。那么有个最简单的方法。 生e经里面这个功能不知道大家留意过没有。这里你只要输入和你这个宝贝主词相关的一个大词,后续会出现很多热搜词。现在我们就开始整理。比如你卖手机,你在这里输入手机,巴拉巴拉后面出现一堆XX手机,XXX智能手机,那么我们怎么去筛选。 和商品最接近,最匹配的词,就是我们要的词!
体感互动系统
体感互动系统 2014年科技周大量体感互动游戏亮相于农展馆,吸引了众多老百姓前去参观体验,让人们了解高新科技。与此同时2014车展会上幻视联创体感互动游戏的火爆,充分说明了体感互动将再次成为科技热点,未来的高科技一定会脱离触控。 继有传Windows Phone 8和Windows 8笔记本将引入Kinect后,就有消息人士透露Apple TV将配备类似Kinect的体感设备。而三星和创维均已推出支持语音控制和手势识别的智能电视。随着微软Xbox 720和Kinect 2的不断研发,体感互动将能覆盖小至手机、大至环幕的平台,引发多媒体互动新时代。 作为国内体感互动先驱的幻视联创,有着多年互动多媒体研发经验,虽然论技术不敌微软、苹果这些大公司,但是在国内已经是互动
多媒体的领航者。公司拥有一站式高科技数字互动技术的软件开发、应用、设计、制作展品展项的相关经验,拥有国内顶级的专业技术人员队伍和优秀管理团队。 幻视联创体感互动是新型的多媒体系统,它能精确识别各种个性化互动方式,令用户本身成为遥控器,实现真正的人机互动。体感互动包括硬件互动设备、体感互动软件系统及数字内容三部分,可直接通过身体语言以及手势传递更丰富的互动指令,比如驾驶、购物、飞行,甚至舞蹈,同时也可设定互动程序根据观众的特定动作做出实时反应回馈。其识别技术更精准,抗干扰能力强。 幻视联创体感互动可融入房地产销售中心、规划展厅、企业展厅等不同场所,改变传统展览单纯观看的模式,启发观众全身心的参观体验,形成深刻的游览印象。例如将三维漫游与体感互动相融合,引发更逼真的感官震撼,令观众真实感受项目优势,提升营销效率,铸造非凡的品牌魅力。
Photoshop菜鸟入门教程(一)
Photoshop新手入门教程 Author: Mr.Chicken 一、最重要的一些概念 1.像素 很多同学在初次接触Photoshop这样的图像处理软件的时候常常对像素、分辨率这种东西感到困惑。我们来看看以下两幅图。 如果单纯问你哪一幅图像素更高时,你会说“左边那幅”,这说明你的头脑中,你对像素早已有了初步的概念。 我们可以这么认为,像素就是点。在计算机上,所有东西都是数字化的,所以我们看到的图像自然是由一个个点所构成的。 对于我们平常接触最多的位图(可以先不管位图是什么)来说,一幅图被制作出来之后,它的像素是固定的,比如400x400,它构造了一个长四百点,宽四百点的图形。 我们最熟悉不过的便是1024x768了,这在生活中经常见到,假设我们电脑的分辨率便是
1024x768,它表明我们的电脑屏幕长有1024个点,宽有768个点,至于点与点之间的距离是多少,我们就不管了,反正它足够小,根据电脑宽度为768个点,我们便能目测上述左边图形的宽所占点数为768/2,长所占点数也能估计出来。到这里,有的同学会说,那两幅图像素点数不管是长还是宽应该是一样啊。其实这么说是对的,对于左边的图来说,它原本就那么大,我没有对它进行其它操作,而右边的图则不同,它最原始的图像如下所示。 如图所示,这张图原本的宽所占的点估计只有768/4,根据你的电脑是768目测便可知道,但我却人为给它拉伸到了768/2,这样多余的点怎么补充呢?计算机会傻瓜式地进行填充,造成图像失真、模糊。 我们还有另外一种很简单的理解方法,上面的小图,原本像素点就少,携带的信息量本来就小,人为增大它所含像素点数,是没法增加它的信息量的,它的信息量只能减小不能增加,所以现在你就了解了为什么我们把一张图放大会模糊,但是缩小却时常还是显得很清晰。一张位图,信息量固定,所以你放大,按理说信息量要相应增大你才不会觉得别扭,然而它的信息量没变(电脑所自动增加的信息量几乎毫无用处,所以看作信息量没变),所以你看到的就模糊。相反,一张原图放在那里,你将它缩小,信息量应该相应减小,所以电脑按N个点逐次扔掉点不显示就行了,这样你看到的图仍清晰,但也不绝对就这样,但它总会比放大的效果好得多。 所以现在你知道了,对最上面两幅图来说,既可以说它们像素一样多,也可以说不一样,重点在于你是否把计算机自动增加的信息看作信息。 2.矢量图与位图