《自动控制原理》MATLAB分析与设计 (1)
兰州理工大学
《自动控制原理》MATLAB分析与设计
仿真实验报告
院系:电信学院
班级:自动化四班
姓名:周媛
学号: 09220433
时间:2011年 11 月 22日
电气工程与信息工程学院
第三章 线性系统的时域分析法
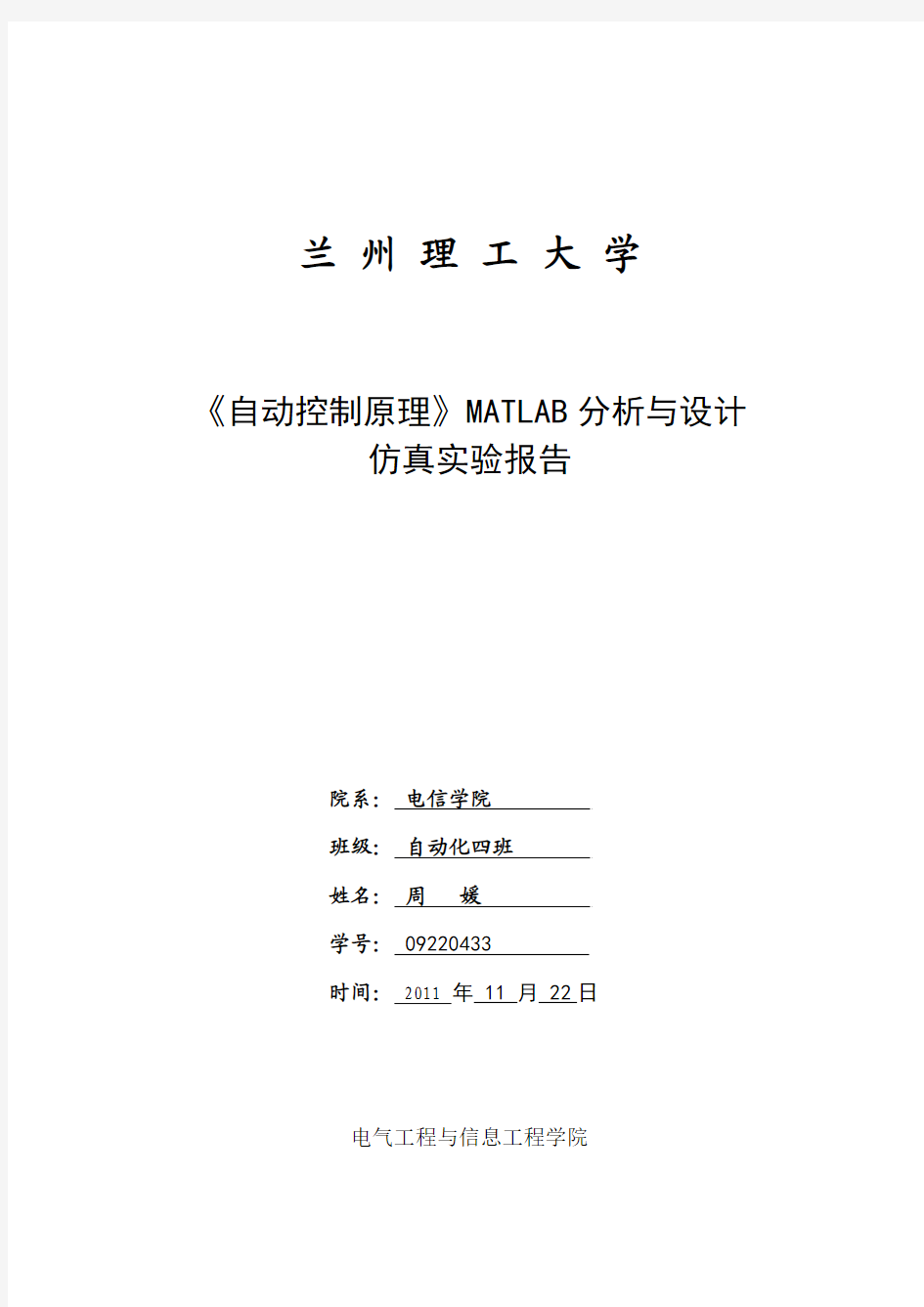
P136.3-5 单位反馈系统的开环传递函数为0.41
()(0.6)
s G s s s +=
+ 该系统的阶跃响应
曲线如下图所示,其中虚线表示忽略闭环零点时(即21
()21
G s s s =+=)的阶跃
响应曲线.
解:matlab 程序如下
num=[0.4 1];den=[1 0.6 0]; G1=tf(num,den); G2=1;
G3=tf(1,den);
sys=feedback(G1,G2,-1); sys1=feedback(G3,G2,-1); p=roots(den) c(t)=0:0.1:1.5; t=0:0.01:20; figure(1)
step(sys,'r',sys1,'b--',t);grid;
xlabel('t');ylabel('c(t)');title('阶跃响应'); 程序运行结果如下:
阶跃响应
t (sec)
2468101214161820
结果对比与分析:
时间,但是同时也增大了超调量,所以,在选择系统的时候应该同时考虑减小响应时间和减小超调量。并在一定程度上使二者达到平衡,以满足设计需求。
P139.3-9 设测速反馈校正系统控制系统的闭环传递函数为210
()310
s s s Φ=++,
比例-微分校正系统的闭环传递函数为210
()310
s s s s +Φ=++,试分析在不同控制器
下的系统的稳态性能。
解:matlab 程序如下, %第一小题
G1=tf([10],[1 1 0]); G2=tf([0.2 0],[1]); G3=feedback(G1,G2,-1); G4=series(1,G3);
sys=feedback(G4,1,-1); %第二小题
G5=tf([0.1 0],[1]); G6=1;
G7=tf([10],[1 1 0]); G8=parallel(G5,G6); G9=series(G8,G7);
sys1=feedback(G9,1,-1); p=roots(den) t=0:0.01:15; figure
step(sys,'r',sys1,'b--',t);grid;
xlabel('t');ylabel('c(t)');title('阶跃响应');
不同控制器下的单位阶跃响应曲线如下图所示,其中红色实线为测速反馈校正系统的阶跃响应,蓝色虚线为比例-微分校正系统的单位阶跃响应曲线。
t (sec)
c (t )
5
1015
00.20.40.60.8
1
1.2
1.4
峰值时间tp=1.13,比例-微分校正系统中(虚线),其峰值为 1.37,峰值时间tp=0.94,对比以上两个曲线可明显看出,测速校正控制器可以明显降低系统的峰值及超调量,但是会增加系统的调节时间;而比例-微分控制器能缩短系统的调节时间,但是会增加系统的超调量,所以针对不同的系统要求应采用不同的控制器,使系统满足设计需求。
P155.E3.3 系统的开环传递函数为()
2
6205
()131281G s s s s =
++ (1)确定系统的零极点
(2)在单位阶跃响应下分析系统的稳态性能
(3)试分析传递函数的实虚极点对响应曲线的影响 解:matlab 程序文本如下
num=6205;den=conv([1 0],[1 13 1281]); G=tf(num,den);
sys=feedback(G,1,-1);
figure(1); pzmap(sys);
[z,k,p]=tf2zp(num,den),
xlabel('j');ylabel('1');title(' 零极点分布图');grid ; t=0:0.01:3; figure(2);
step(sys,t);grid;
xlabel('t');ylabel('c(t)');title(' 阶跃响应');
(1)z =
Empty matrix: 0-by-1
k =
0 -6.5000 +35.1959i -6.5000 -35.1959i
p = 6205
(2)该系统的单位阶跃响应曲线和零极点分布图如下图所示
阶跃响应
t (sec)
c (t )
0.51 1.52 2.53
00.20.40.60.8
1
1.2
1.4
-6
-5
-4
-3-2
-1
-40-30-20-10
10
20
3040
零、极点分布图
j
1
结果分析:由图可知,该系统的上升时间R t =0.405,峰值时间P t =2.11,超调量%σ=0.000448,峰值为1。
由于闭环极点就是微分方程的特征根,因此它们决定了所描述系统自由运动的模态,而且在零初始响应下也会包含这些自由运动的模态。也就是说,传递函数的极点可以受输入函数的激发,在输出响应中形成自由运动的模态。
P162.Disk Drive Read System 在100=a K 时,试采用微分反馈使系统的性能满足给定的设计指标(超调量<5%,调节时间<250ms )。 解:matlab 程序文本如下 G=tf([500000],[1 1000]); G1=tf([1],[1 20 0]); G2=series(G,G1); G3=tf([0.029,1],[1]); sys=feedback(G2,1); sys1=feedback(G2,G3,-1); figure
step(sys,sys1);grid; 程序运行结果如下
Time (sec)
A m p l i t u d e
00.10.20.30.40.50.6
0.2
0.4
0.6
0.8
1
1.2
1.4
系统的超调量和调节时间降低,所以在系统中增加微分反馈可以增加系统的稳态性能。
第四章 线性系统的根轨迹法
P159.E4.5 一控制系统的开环传递函数为()
()(1)
c G s G s s s =
- (1)若()c G s K =,画出系统的根轨迹图 (2)若(2)
()(20)
c K s G s s +=
+画出系统根轨迹图,并确定系统稳定时K 的值。
确定根轨迹与虚轴交点处的根。
解:matlab 程序文本如下 G=tf([1],[1 -1 0]); figure(1) rlocus(G);
num=[1 2]; den=[1 20]; Gc=tf(num,den);
sys=parallel(Gc,G); figure(2) rlocus(sys);
第(1)题的根轨迹如下
00.10.20.30.40.50.60.70.80.91
Root Locus
Real Axis
I m a g i n a r y A x i s
第(2)题的根轨迹图如下
Root Locus
Real Axis
I m a g i n a r y A x i s
-20
-15-10
-505
结果分析:在第一小题的根轨迹图中可以看出,系统的闭环极点都位于s 平面的有半平面,所以系统不稳定;在第二小题的根轨迹图中可以看出,系统的根轨迹图与虚轴有两个交点(分别为±1.51i ),对应的开环增益为21.6。
P181.4-5-(3) 概略绘出*
()(1)( 3.5)(32)(32)K G s s s s s j s j =+++++-的根轨迹图。
解:matlab 程序文本如下
G=tf([1],[1 10.5 43.5 79.5 45.5 0]); subplot(211); pzmap(G); subplot(212); rlocus(G);
运行结果如下图所示
P ole-Zero Map
Real Axis
I m a g i n a r y A x i s
-12
-10-8-6
-4-20246
-10-50510
Root Locus
Real Axis
I m a g i n a r y A x i s
P181.4-10 设反馈控制系统中*
2()(2)(5)
K G s s s s =++ ,()1H s =要求:
(1) 概略绘出系统根轨迹图,并判断闭环系统稳定性;
(2) 如果改变反馈通路传递函数,使()12H s s =+,试判断改变后的系统稳定性,研究由于H(s)的改变所产生的效应。
解:matlab 程序文本如下 %当H(s)=1 num=1;
den=conv([1 2 0],[1 5]);
G=tf(num,den); figure(1); subplot(211); pzmap(G); subplot(212); rlocus(G); %当H(s)=1+2s num1=[2 1];
G1=tf(num1,den); figure(2); subplot(211); pzmap(G1); subplot(212); rlocus(G1);
当H(s)=1时程序运行结果如下
-5
-4.5-4-3.5-3-2.5-2-1.5-1-0.50
P ole-Zero Map
Real Axis I m a g i n a r y A x i s
-10-50510
Root Locus
Real Axis
I m a g i n a r y A x i s
当H(s)=1+2s 时,程序运行结果如下
-5
-4.5-4-3.5-3-2.5-2-1.5-1-0.50
P ole-Zero Map
Real Axis I m a g i n a r y A x i s
-5
-4.5-4-3.5-3-2.5-2-1.5-1-0.50
Root Locus
Real Axis
I m a g i n a r y A x i s
结果分析:当H(s)=1时系统无零点,系统临界稳定的增益为69.8,此时系统的根轨迹与虚轴的交点为±3.16i ;H(s)=1+2s 时,系统加入一个一阶微分环节,此时无论增益如何变化,系统总处于稳定状态,也就是说给系统加入一个一阶微分环节能大幅度提高系统的稳定性。
第五章 线性系统的频域分析法
P238.5-8 已知系统的开环传递函数为2
10
()()(21)(0.51)
G s H s s s s s =+++,画出系统的概略频率特性曲线。
解:matlab 程序文本如下 num=10;
den=conv([2 1 0],[1 0.5 1]); G=tf(num,den); figure(1); margin(G); figure(2);
nichols(G);grid; figure(3); nyquist(G);
程序运行结果如下
M a g n i t u d e (d B )10
-2
10
-1
10
10
1
10
2
P h a s e (d e g )
Bode Diagram
Gm = -22.5 dB (at 0.707 rad/sec) , P m = -136 deg (at 1.62 rad/sec)
Frequency (rad/sec)
-360
-315
-270
-225
-180
-135
-90
-45
-100-80-60-40-20
20
40
60
Nichols Chart
Open-Loop P hase (deg)
O p e n -L o o p G a i n (d B )
-25
-20-15-10-505
-400-300
-200
-100
100
200
300
400
Nyquist Diagram
Real Axis
I m a g i n a r y A x i s
P238.5-10 已知开环传递函数为210
()()111
(1)(1)293
G s H s s s s s =+++,试该绘制系
统的概略频率特性曲线。 解:matlab 程序文本如下 num=[1 1];
den=conv([0.5 1 0],[1/9 1/3 1]); G=tf(num,den); figure(1); margin(G); figure(2);
nichols(G);grid; figure(3); nyquist(G);
程序运行结果如下
-100-50
50
M a g n i t u d e (d B )10
-1
10
10
1
10
2
-270
-225-180-135-90
-45P h a s e (d e g )
Bode Diagram
Gm = 6.89 dB (at 3.4 rad/sec) , P m = 69.4 deg (at 1.7 rad/sec)
Frequency (rad/sec)
-360
-315
-270
-225
-180
-135
-90
-45
-100-80-60-40-20
20
40
Nichols Chart
Open-Loop P hase (deg)
O p e n -L o o p G a i n (d B )
-360
-315
-270
-225
-180
-135
-90
-45
-100-80-60-40-20
20
40
Nichols Chart
Open-Loop P hase (deg)
O p e n -L o o p G a i n (d B )
-1
-0.8-0.6-0.4-0.200.20.4
Nyquist Diagram
Real Axis
I m a g i n a r y A x i s
第六章 线性系统的校正
P296.6-1 设有单位反馈的火炮指挥伺服系统,其开环传递函数为
)
15.0)(12.0()(++=
s s s K
s G 若要求系统最大输出速度为012/s ,输出位
置的容许误差小于02,试求:
(1)确定满足上述条件的最小K 值,计算该K 值下系统的相角裕度和
幅值裕度;
(2)在前向通道中串联超前校正网络1
08.01
4.0)(++=s s s G c ,计算校正后
系统的相角裕度和幅值裕度,说明超前校正对系统动态性能的影响。
解:matlab 程序文本如下 K=6;
G0=tf(K,[conv([0.2,1,0],[0.5,1])]); % 待校正系统的开环传递函数 Gc=tf([0.4,1],[0.08,1]); % 超前校正网络的传递函数 G=series(Gc,G0); % 校正后系统的开环传递函数 G1=feedback(G0,1); % 待校正系统的闭环传递函数 G11=feedback(G,1); % 校正后系统的闭环传递函数 figure(1);
subplot(211);margin(G0);grid subplot(212);margin(G);grid figure(2)
step(G1,'r',G11,'b--');grid 程序运行结果如下图
-2000
200M a g n i t u d e (d B )
10
-210-1
100
101
102
10
3
-360
-180
0P h a s e (d e g )Bode Diagram
Gm = 1.34 dB (at 3.16 rad/sec) , P m = 4.05 deg (at 2.92 rad/sec)
Frequency (rad/sec)
-2000
200M a g n i t u d e (d B )
10
-1100
101
102
10
3
-360
-180
0P h a s e (d e g )Bode Diagram
Gm = 9.9 dB (at 7.38 rad/sec) , P m = 29.8 deg (at 3.85 rad/sec)
Frequency (rad/sec)
Step Response
Time (sec)
A m p l i t u d e
0102030
40506070
0.20.40.60.811.2
1.41.61.82
提高系统的稳定性,增大截止频率,从而缩短调节时间,提高快速性。 P296.6-5 设单位反馈系统的开环传递函数为)
12(8
)(0+=
s s s G ,若采用滞后-超
前校正装置)
12.0)(1100()
12)(110()(++++=
s s s s s G c ,对系统进行串联校正,试绘
制校正前后的对数幅频渐进特性曲线,并计算校正前后的相角裕度。
解:matlab 程序文本如下 w=0.001:1:100;
G0=tf(8,[conv([1,0],[2,1])]);
Gc=tf([conv([10,1],[2,1])],[conv([100,1],[0.2,1])]); G=series(G0,Gc); subplot(211);margin(G0); subplot(212);margin(G);
G1=feedback(G0,1);G11=feedback(G,1); figure(2);step(G1,'r',G11,'b--');grid
程序运行结果如下
-1000
100M a g n i t u d e (d B )
10
-210
-1
10
10
1
-180
-90
P h a s e (d e g )Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 14.2 deg (at 1.97 rad/sec)
Frequency (rad/sec)
-2000
200M a g n i t u d e (d B )
10
-410
-3
10
-2
10
-1
10
10
1
10
2
-180
-90
P h a s e (d e g )Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 74.5 deg (at 0.796 rad/sec)
Frequency (rad/sec)
Step Response
Time (sec)
A m p l i t u d e
0510
152025
0.20.40.60.811.21.41.61.8
结果分析:
后可使系统的响应速度、相角裕度和稳态精度提高。
P297.6-7 P298图6-55为三种推荐的稳定系统的串联校正网络特性,他们均
由最小相位环节构成。若控制系统为单位反馈系统,其开环传递函
数为)
101.0(400
)(2
0++
s s s G ,则这些校正网络特性中,哪一种可使已校正系统的程度最好?
解:matlab 程序文本如下
G=tf(400,[conv([1,0,0],[0.01,1])]);
% 图(a)校正网络和校正后系统的开环和闭环传递函数
Gc1=tf([1 1],[10 1]);G1=series(G,Gc1);G11=feedback(G1,1) % 图(b)校正网络和校正后系统的开环和闭环传递函数
Gc2=tf([0.1,1],[0.01,1]);G2=series(G,Gc2);G21=feedback(G2,1); % 图(c)校正网络和校正后系统的开环和闭环传递函数
Gc3=tf([conv([0.5,1],[0.5,1])],[conv([10,1],[0.025,1])]); G3=series(G,Gc3);G31=feedback(G3,1); figure(1);
subplot(221);margin(G11); subplot(222);margin(G21); subplot(223);margin(G31); figure(2);step(G11);grid;
figure(3);step(G21,'r',G31,'b--'); grid
程序运行结果如下
-2000
200M a g n i t u d e (d B )
10
10
2
10
4
-360
-180
P h a s e (d e g )Bode Diagram Gm = Inf , P m = -21.7 deg (at 8.88 rad/sec)Frequency (rad/sec)
-200
200
M a g n i t u d e (d B )
10
0102
10
4
-360
-180
0P h a s e (d e g )Bode Diagram
Gm = 9.54 dB (at 89.4 rad/sec) , P m = 41 deg (at 57.3 rad/sec)Frequency (rad/sec)
-2000
200
M a g n i t u d e (d B )
10
0102
10
4
-360
360P h a s e (d e g )Bode Diagram
Gm = 20.9 dB (at 58.8 rad/sec) , P m = 95.1 deg (at 13 rad/sec)
Frequency (rad/sec)
0.51 1.52 2.53 3.54
-15
-10-50
5
10
Step Response
Time (sec)
A m p l i t u d e
matlab课程教学设计(简单计算器的设计)
matlab课程设计报告 题目简易计算器的设计 学院电子信息工程学院 专业电子信息 学生姓名和学号 指导教师
一、选题目的及意义 GUI的广泛应用是当今计算机发展的重大成就之一,它极大地方便了非专业用户的使用。人们从此不再需要死记硬背大量的命令,取而代之的是可以通过窗口、菜单、按键等方式来方便地进行操作,而在matlab有很简单的gui设计工具,我们可以通过这个工具轻松地构建我们想要的程序,从而实现与用户的信息交互。本次课程设计是使用了matlab中的guide生成了简单的计算器程序。 二、源代码 function varargout = Calculator(varargin) %Simple Calculator %@Anhui University % Begin initialization code - DO NOT EDIT gui_Singleton = 1; gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @Calculator_OpeningFcn, ... 'gui_OutputFcn', @Calculator_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []); if nargin && ischar(varargin{1}) gui_State.gui_Callback = str2func(varargin{1}); end if nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); else
matlab课程设计题目
课题一: 连续时间信号和系统时域分析及MATLAB实现 课题要求: 深入研究连续时间信号和系统时域分析的理论知识。利用MATLAB强大的图形处理功能、符号运算功能以及数值计算功能,实现连续时间信号和系统时域分析的仿真波形。 课题内容: 一、用MATLAB实现常用连续时间信号的时域波形(通过改变参数,分析其时域特性)。 1、单位阶跃信号, 2、单位冲激信号, 3、正弦信号, 4、实指数信号, 5、虚指数信号, 6、复指数信号。 二、用MATLAB实现信号的时域运算 1、相加, 2、相乘, 3、数乘, 4、微分, 5、积分 三、用MATLAB实现信号的时域变换(参数变化,分析波形变化) 1、反转, 2、使移(超时,延时), 3、展缩, 4、倒相, 5、综合变化 四、用MATLAB实现信号简单的时域分解 1、信号的交直流分解, 2、信号的奇偶分解 五、用MATLAB实现连续时间系统的卷积积分的仿真波形 给出几个典型例子,对每个例子,要求画出对应波形。 六、用MATLAB实现连续时间系统的冲激响应、阶跃响应的仿真波形。 给出几个典型例子,四种调用格式。 七、利用MATLAB实现连续时间系统对正弦信号、实指数信号的零状态响应的仿真波形。 给出几个典型例子,要求可以改变激励的参数,分析波形的变化。 课题二: 离散时间信号和系统时域分析及MATLAB实现。 课题要求: 深入研究离散时间信号和系统时域分析的理论知识。利用MATLAB强大的图
形处理功能、符号运算功能以及数值计算功能,实现离散时间信号和系统时域分析的仿真波形。 课题内容: 一、用MATLAB绘制常用信号的时域波形(通过改变参数分析其时域特性) 1、单位序列, 2、单位阶跃序列, 3、正弦序列, 4、离散时间实指数序列, 5、离散时间虚指数序列, 6、离散时间复指数序列。 二、用MATLAB实现信号的时域运算 1、相加, 2、相乘, 3、数乘。 三、用MATLAB实现信号的时域变换(参数变化,分析波形的变化) 1、反转, 2、时移(超时,延时), 3、展缩, 4、倒相。 四、用MATLAB实现离散时间系统卷积和仿真波形 给出几个典型例子,对每个例子要求画出e(k),h(k),e(i),h(i),h(-i),Rzs(k)波形。 五、用MATLAB实现离散时间系统的单位响应,阶跃响应的仿真波形 给出几个典型例子,四中调用格式。 六、用MATLAB实现离散时间系统对实指数序列信号的零状态响应的仿真波形 给出几个典型例子,要求可以改变激励的参数,分析波形的变化。 课题三: 连续时间信号傅里叶级数分析及MATLAB实现。 课题要求: 深入研究连续时间信号傅里叶级数分析的理论知识,利用MATLAB强大的图形处理功能,符号运算功能以及数值计算功能,实现连续时间周期信号频域分析的仿真波形。 课题内容: 一、用MATLAB实现周期信号的傅里叶级数分解与综合 以周期矩形波信号为例,绘出包含不同谐波次数的合成波形,观察合成波形与原矩形 波形之间的关系及吉布斯现象。
《ACM算法与数据结构设计》大作业
《ACM算法与数据结构设计》课程大作业报告 题目:五位以内的对称素数 学生姓名 班级学号 学生学院计算机软件学院 学生专业计算机科学与技术 联系电话 电子邮 指导教师 指导单位计算机学院软件工程系 日期2011.5.24
注意事项 (1)课程大作业从《ACM算法与数据结构设计》课程实验二(2011年4月19日)或实验三(2011年5月10日)中任选一个课题完成。(2)课程大作业内容包括课题名称、课题内容和要求、课题分析、概要设计、详细设计、测试数据及其结果分析、调试过程中的问题、参考资料列表、课程小结等。 (3)课程报告可以打印,也可以手写,但前面两页内容、大作业撰写纲要、课程小结不可遗漏和更换。 (4)课程小结给出ACM程序设计过程的收获、遇到的问题,遇到问题解决问题过程的思考、程序调试能力的思考等,需要手写签字。(5)课程大作业提交时间为2011年5月24日(第14周星期二)晚19:00~20:00,地点:计算中心A机房。
一、课题名称: 五位以内的对称素数 二、课题内容和要求: 题目:判断一个数是否为对称且不大于五位数的素数。 要求:判断输入的一组数据(正整数)是否是五位以内的对称素数,逐个判断并输出“yes”或“no” 三、课题分析: 定义两个函数分别判断数据是否为素数(bool isprime(int n)),是否是对称数(bool issym(int n));在main()函数中利用if()语句来判断该数据是否是五位以内的数。只有同时满足三个条件,才能判断一个数据是五位以内的对称素数,输出“yes”;否则输出“no”。 输入输出方案: 输入: 输入数据含有不多于50个的正整数(0 实验 6 极点配置与全维状态观测器的设计 一、实验目的 1. 加深对状态反馈作用的理解。 2. 学习和掌握状态观测器的设计方法。 二、实验原理 在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。 [K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。 三、实验内容 1.已知系统 (1)判断系统稳定性,说明原因。 (2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。 (3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置? (4)使用状态反馈进行零极点配置的前提条件是什么? 1. (1) (2) 代码: a=[-2 -1 1;1 0 1;-1 0 1]; b=[1,1,1]'; p=[-1,-2,-3]'; K=acker(a,b,p) K = -1 2 4 (3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置? 在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。 (4)使用状态反馈配置极点的前提是系统的状态是完全可控的。 2.已知系统 设计全维状态观测器,使观测器的极点配置在12+j,12-j 。 (1)给出原系统的状态曲线。 (2)给出观测器的状态曲线并加以对比。(观测器的初始状态可以任意选取)观察实验结果,思考以下问题: (1)说明反馈控制闭环期望极点和观测器极点的选取原则。 (2)说明观测器的引入对系统性能的影响。 (1)A=[0 1;-3 -4]; B=[0;1]; C=[2 0]; D=[]; G=ss(A,B,C,D); x=0:0.001:5; U=0*(x<0)+1*(x>0)+1*(x==0); X0=[0 1]'; T=0:0.001:5; lsim(G,U,T,X0); 华东交通大学MATLAB程序设计报告书 课题名称:基于MATLAB的粒子群优化算法的实现 姓名: 学号:20160280800014 专业:控制科学与工程 2016年 11月 20日 基于MATLAB的粒子群优化算法的实现 一、课程选题目的 本次课程设计的课题为《基于MATLAB的粒子群优化算法的实现》,主要为学会运用MATLAB对实际算法编程,加深对粒子群优化算法的理解,并为今后熟练使用MA TLAB进行系统的分析仿真和设计奠定基础。数值计算分析可以帮助更深入地理解理论知识,并为将来使用MA TLAB进行各领域数值分析分析和实际应用打下基础。 此次课程主要是为了进一步熟悉对MATLAB软件的使用,以及学会利用MA TLAB对数值运算这种实际问题进行处理,将理论应用于实际,加深对它的理解。 二、粒子群优化算法原理 优化是科学研究、工程技术和经济管理等领域的重要研究工具。它所研究的问题是讨论在众多的方案中寻找最优方案。例如,工程设计中怎样选择设计参数,使设计方案既满足设计要求又能降低成本;资源分配中,怎样分配有限资源,使分配方案既能满足各方面的基本要求,又能获得好的经济效益。在人类活动的各个领域中,诸如此类,不胜枚举。优化这一技术,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性很强的科学。近十余年来,粒子群优化算法作为群体智能算法的一个重要分支得到了广泛深入的研究,在路径规划等许多领域都有应用。 2.1 粒子群优化算法的起源 粒子群优化(PSO)算法是由Kennedy和Eberhart于1995年用计算机模拟鸟群觅食这一简单的社会行为时,受到启发,简化之后而提出的。 设想这样一个场景:一群鸟随机的分布在一个区域中,在这个区域里只有一块食物。所有的鸟都不知道食物在哪里。但是他们知道当前的位置离食物还有多远。那么找到食物的最优策略是什么呢。最简单有效的方法就是追寻自己视野中目前离食物最近的鸟。如果把食物当作最优点,而把鸟离食物的距离当作函数的适应度,那么鸟寻觅食物的过程就可以当作一个函数寻优的过程。鱼群和鸟群的社会行为一直引起科学家的兴趣。他们以特殊的方式移动、同步,不会相互碰撞,整体行为看上去非常优美。生物学家CargiReynolds提出了一个非常有影响的鸟群聚集模型。在他的模拟模型boids中,每一个个体遵循:避免与邻域个体相冲撞、匹配邻域个体的速度、试图飞向感知到的鸟群中心这三条规则形成简单的非集中控制算法驱动鸟群的聚集,在一系列模拟实验中突现出了非常接近现实鸟群聚集行为的现象。该结果显示了在空中回旋的鸟组成轮廓清晰的群体,以及遇到障碍物时鸟群的分裂和再度汇合过程。由此受到启发,经过简化提出了粒子群优化算法。 2.2粒子群优化算法的原理 在粒子群优化算法中,每个优化问题的潜在解都是搜索空间中的一只鸟,称之为“粒子”。所有的粒子都有一个由被优化的函数决定的适应值,每个粒子还有一个速度决定他们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。优化开始时先初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次迭代中,粒子通过跟踪两个极值来更新自己。第一个极值就是整个种群目前找到的最优解。这个极值是全局极值。另外也可以不用整个种群而只是用其中一部分作为粒子的邻居,那么在所有邻居中的极值就是局部极值。第二个极值是粒子本身所找到的最优解,称为个体极值。这是因为粒子仅仅通过跟踪全局极值或者局部极值来更新位置,不可能总是获得较好的解。这样在优化过程中,粒子在追随全局极值或局部极值的同时追随个体极值则圆满的解决了这个问题。这就是粒子群优化 课程设计任务书 学生姓名:董航专业班级:电信1006班 指导教师:阙大顺,李景松工作单位:信息工程学院 课程设计名称:Matlab应用课程设计 课程设计题目:Matlab运算与应用设计5 初始条件: 1.Matlab6.5以上版本软件; 2.课程设计辅导资料:“Matlab语言基础及使用入门”、“Matlab及在电子信息课程中的应 用”、线性代数及相关书籍等; 3.先修课程:高等数学、线性代数、电路、Matlab应用实践及信号处理类相关课程等。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1.课程设计内容:根据指导老师给定的7套题目,按规定选择其中1套完成; 2.本课程设计统一技术要求:研读辅导资料对应章节,对选定的设计题目进行理论分析, 针对具体设计部分的原理分析、建模、必要的推导和可行性分析,画出程序设计框图,编写程序代码(含注释),上机调试运行程序,记录实验结果(含计算结果和图表),并对实验结果进行分析和总结。具体设计要求包括: ①初步了解Matlab、熟悉Matlab界面、进行简单操作; ②MATLAB的数值计算:创建矩阵矩阵运算、多项式运算、线性方程组、数值统计; ③基本绘图函数:plot, plot3, mesh, surf等,要求掌握以上绘图函数的用法、简单图形 标注、简单颜色设定等; ④使用文本编辑器编辑m文件,函数调用; ⑤能进行简单的信号处理Matlab编程; ⑥按要求参加课程设计实验演示和答辩等。 3.课程设计说明书按学校“课程设计工作规范”中的“统一书写格式”撰写,具体包括: ①目录; ②与设计题目相关的理论分析、归纳和总结; ③与设计内容相关的原理分析、建模、推导、可行性分析; ④程序设计框图、程序代码(含注释)、程序运行结果和图表、实验结果分析和总结; ⑤课程设计的心得体会(至少500字); ⑥参考文献(不少于5篇); ⑦其它必要内容等。 时间安排:1.5周(分散进行) 参考文献: [1](美)穆尔,高会生,刘童娜,李聪聪.MA TLAB实用教程(第二版) . 电子工业出版社,2010. [2]王正林,刘明.精通MATLAB(升级版) .电子工业出版社,2011. [3]陈杰. MA TLAB宝典(第3版) . 电子工业出版社,2011. [4]刘保柱,苏彦华,张宏林. MATLAB 7.0从入门到精通(修订版) . 人民邮电出版社,2010. 指导教师签名:年月日 系主任(或责任教师)签名:年月日 自控系统仿真软件课程设计报告 MATLAB 设计题目:牛顿摆球 姓名: 学号: 院系: 班级:1203 指导教师: 2014年12月20日 一.课程设计目的 1、熟悉课程设计的基本流程; 2、掌握MATLAB语法结构及调试方法; 3、熟悉MATLAB函数调用,熟练二维画图; 4、掌握MATLAB语言在控制方面的运用; 5、学会用MATLAB进行基本仿真; 6、掌握MATLAB编程技巧,提高编程水平。 二.系统分析 1.题目的描述: (1)牛顿摆球原理描述 五个质量相同的球体由吊绳固定,彼此紧密排列。当摆动最右侧的球并在回摆时碰撞紧密排列的另外四个球,最左边的球将被弹出,并仅有最左边的球被弹出。当然此过程也是可逆的,当摆动最左侧的球撞击其它球时,最右侧的球会被弹出。当最右侧的两个球同时摆动并撞击其他球时,最左侧的两个球会被弹出。同理相反方向同样可行,并适用于更多的球。 为了更接近现实,在这里我将考虑重力及空气阻力的影响,摆球将不会永无止境的运动下去,由于外界因素的影响,摆球运动一段时间后将回归静止状态。(2)通过MATLAB动画程序制作软件,实现下述过程 当运行程序时,把最右边的小球拉到一定的高度放下,让其碰撞其余四个小球,仅让最左边的小球被弹出,当最左边小球回摆碰撞其它球时,最右边小球又被弹出,如此循环。由于是非理想条件下,摆球的摆动幅度会随摆动次数的增加越来越小,直到静止。 时间停顿两秒,把右边两小球一起拉到一定高度放下,让其碰撞其余三个球,同样仅让左边两球被弹出,当球回摆再次碰撞时,最右边两球又被同时弹出,如此循环,因为外界因素的影响,最终五个球都会静止下来。 (3)整个实验看似简单,但要在MATLAB上完成这样一个动画过程,还是需要下点功夫,克服困难的。经过自己的努力,终于实现了整个过程,这也是一种不小的收获。 2.设计要求: (1)能够实现有阻尼摆动,即摆幅随摆动次数增加越来越小,直到静止。(2)能够让摆球弧线摆动。 三.系统设计 1.系统设计过程 (1)通过函数axis建立坐标系 (2)在坐标系范围内通过函数line画各个支架 (3)通过函数title添加标题“动量守恒实验”、函数text添加标注“牛顿摆球” (4)通过函数line画出五个球,并设定其初始位置,颜色,大小,线条的擦拭方式 2017级《程序设计与算法综合实践》 期末大作业题目及评分标准 有如下情况之一者,为不及格。 (1)未能完成所选题目评分标准的最低要求。 (2)抄袭他人成果。 (3)大作业检查时不带电脑,或电脑没有C语言开发环境。 (4)出勤次数、课堂表现等不符合学校相关教学文件规定等其他情况。 备选题目目录 1.图书购买系统...............................................................................................................- 2 - 2.物流信息管理系统 ....................................................................................................- 3 - 3.PM2.5实时信息管理系统 ............................................................ - 5 - 4.电影评论系统 ............................................................................... - 6 - 5.游戏角色属性分析........................................................................ - 8 - 6.KTV点歌系统 ................................................................................ - 9 - 7.英语词斩系统 ............................................................................. - 11 - 8.校运动会成绩管理系统.............................................................. - 14 - 9.通讯录管理系统 ......................................................................... - 15 - 10.机票购买系统 ............................................................................. - 16 - 11.车辆销售管理系统...................................................................... - 17 - 12.饮品自动贩卖机系统.................................................................. - 18 - 第7章线性定常离散时间状态空间设计法 7.1引言 7.2状态反馈配置极点 7.3状态估值和状态观测器 7.4利用状态估值构成状态反馈以配置极点 7.5扰动调节 7.6无差调节 7.1 引言 一个被控对象: (1)()()()() ():1,():1,:,:,:x k Fx k Gu k y k Cx k x k n u k m F n n G n m C r n +=+?? =?????? 7.1 当设计控制器对其控制时,需要考虑如下各因素: ● 扰动,比如负载扰动 ● 测量噪声 ● 给定输入的指令信号 ● 输出 如图7.1所示。 给d L (k )扰动 图7.1 控制系统示意图 根据工程背景的不同,控制问题可分为调节问题和跟踪问题,跟踪问题也称为伺服问题。 调节问题的设计目标是使输出迅速而平稳地运行于某一平衡状态。包括指令变化时的动态过程,和负载扰动下的动态过程。但是这二者往往是矛盾的,需要折衷考虑。 伺服问题的设计目标是对指令信号的快速动态跟踪。 本章研究基于离散时间状态空间模型的设计方法。 7.2研究通过状态变量的反馈对闭环系统的全部特征值任意配置——稳定性与快速线。 7.3考虑当被控对象模型的状态无法直接测量时,如何使用状态观测器对状态进行重构。 7.4讨论使用重构状态进行状态反馈时闭环系统的特征值。 7.5简单地讨论扰动调节问题。 7.6状态空间设计时的无差调节问题。 7.2 状态反馈配置极点 工程被控对象如式7.1,考虑状态反馈 ()()()u k v k Lx k =+ 7.2 如图7.2所示。式7.2带入式7.1,得 (1)()()()() ()()()x k Fx k Gu k y k Cx k u k v k Lx k +=+?? =??=+? 7.3 整理得 ()(1)()() ()()x k F GL x k Gv k y k Cx k +=++?? =? 7.4 (k ) v (k ) 图7.2 状态反馈任意配置闭环系统的极点 闭环系统的特征方程为 []det ()0zI F GL -+= 7.5 问题是在什么情况下式7.5的特征根是可以任意配置的?即任给工程上期望的n 个特征根λ1, λ2, ..., λn ,有 []1det ()()0n i i zI F GL z λ=-+=-=∏ 7.6 定理:状态反馈配置极点 Matalab课后作业 学院:电气信息工程及其自动化 班级: 学号: 姓名: 完成日期: 2012年12月23日 1、 matlab 软件主要功能是什么?电气工程及其自动化专业本科生主要用到哪 些工具箱,各有什么功能? 答:(1)主要功能:工业研究与开发; 数学教学,特别是线性代数;数值分析和科学计算方面的教学与研究;电子学、控制理论和物理学等工程和科学学科方面的教学与研究; 经济学、化学和生物学等计算问题的所有其他领域中的教学与研究;符号计算功能;优化工具;数据分析和可视化功能;“活”笔记本功能;工具箱;非线性动态系统建模和仿真功能。 (2)常用工具箱: (a ) MATLAB 主工具箱:扩充matlab 的数值计算、符号运算功能、图形建模仿真功能、文字处理功能以及与硬件实时交互功能。 (b )符号数学工具箱:符号表达式、符号矩阵的创建;符号可变精度求解;因式分解、展开和简化;符号代数方程求解;符号微积分;符号微分方程。 (c ) SIMULINK 仿真工具箱: Simulink 是用于动态系统和嵌入式系统的多领域仿真和基于模型的设计工具。对各种时变系统,包括通讯、控制、信号处理、视频处理和图像处理系统,Simulink 提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。 (d )信号处理工具箱:数字和模拟滤波器设计、应用及仿真;谱分析和估计;FFT 、DCT 等 变换;参数化模型。 (e )控制系统工具箱:连续系统设计和离散系统设计;状态空间和传递函数以及模型转换;时域响应(脉冲响应、阶跃响应、斜坡响应);频域响应(Bode 图、Nyquist 图);根轨迹、极点配置。 2、设y=23e t 4-sin(43t+3 ),要求以0.01秒为间隔,求出y 的151个点,并求出其导数的值和曲线。 程序如下: clc clear x=0:0.01:1.5; y=sqrt(3)/2*exp(-4*x).*sin(4*sqrt(3)*x+pi/3); y1=diff(y); subplot(2,1,1) plot(x,y) subplot(2,1,2) plot(x(1:150),y1) 曲线如下图所示: 第一类:单位转换 1.长度单位换算的设计与实现 2.面积单位换算的设计与实现 3.体积单位换算的设计与实现 4.容积单位换算的设计与实现 5.质量单位换算的设计与实现 6.时间单位换算的设计与实现 7.温度单位换算的设计与实现 7.压强单位换算的设计与实现 8.角度单位换算的设计与实现 8.功率单位换算的设计与实现 第二类:曲线绘制 1.直线的自动绘制和相关计算 2.椭圆的自动绘制和相关计算 3.双曲线的自动绘制和相关计算 4.抛物线的自动绘制和相关计算 5.心脏线的自动绘制和相关计算 6.渐开线的自动绘制和相关计算 7.滚圆线的自动绘制和相关计算 8.三叶玫瑰线的自动绘制和相关计算9.四叶玫瑰线的自动绘制和相关计 10.阿基米德螺线的自动绘制和相关计算第三类:曲面绘制 1.球面的自动绘制和相关计算 2.椭球面的自动绘制和相关计算 3.单叶双曲面的自动绘制和相关计算 4.双叶双曲面的自动绘制和相关计算 5.抛物面的自动绘制和相关计算 6.双曲抛物面的自动绘制和相关计算 7.双曲柱面的自动绘制和相关计算 8.椭圆柱面的自动绘制和相关计算 9.抛物柱面的自动绘制和相关计算 10.圆锥面的自动绘制和相关计算 第四类:线性回归 1.男士身高体重相关计算经验公式 2.女士身高体重相关计算经验公式 3.男士胖瘦等级的确定 4.女士胖瘦等级的确定 5.男士身高脚长相关计算经验公式 6.女士身高脚长相关计算经验公式 7.父子身高相关性研究 8.母子身高相关性研究 9.父女身高相关性研究 10.母女身高相关性研究 第五类:学习成绩 1.期末总评自动计算的设计与实现 2.成绩等级自动评定的设计与实现 3.成绩分段自动统计的设计与实现 4.成绩分布折线自动绘制的设计与实现 5.成绩自动统计分析的设计与实现 6.试卷分布自动分析的设计与实现 7.试卷难度自动分析的设计与实现 8.考试成绩名次自动生成的设计与实现 《软件系统分析与设计》 期末大作业 选题名称:游戏平台管理系统设计人:徐文豪刘青海 赖超宇甘智宏 班级:软工143班 南昌大学软件学院 2016.6.1 目录 一、整体描述 (2) 二、需求分析 (3) 三、系统功能概况 (4) 四、类的属性与方法 (5) 五、系统界面界限 (11) 六、设计模型 (13) 七、设计原则 (17) 八、设计模式······················ 一、整体描述 随着移动通讯的发展,手机应用也越来越多,其中,游戏应用占据了很大的比重,游戏平台管理系统是整合了大量游戏应用,以及玩家线上交流的平台。 主要受众群:拥有移动端或电脑端的人群。 应用前景:移动互联的发展为游戏平台的发展提供了很大的生存空间,应用前景十分广阔 盈利方式:向平台中游戏的开发商收取一定的费用,游戏玩家向游戏中注入资金时,收取一定比例的游戏收入。 面临的困难:游戏平台前期的推广,提高游戏平台本身对开发商和游戏玩家的吸引力,游戏平台能否适应大部分游戏玩家的要求。 玩家首先要注册账号,然后就可以在上面下载游戏应用,上传自己的游戏资源。同时,根据玩家的活跃程度获取相应积分,用积分可以兑换游戏礼包,也会根据玩家等级在游戏装备上给与相应的优惠和等级奖励。玩家在每一款游戏的评论区都可以交流游戏经验,提出意见和建议,以便游戏及时更新,弥补相应不足。玩家也可以建立游戏工会,不同游戏的玩家都可以加入,分享自己的游戏心得或者转赠游戏装备或积分。 二、需求分析 时间when:游戏厂商:随时;注册用户:随时;管理人员:正常工作时间。 地点Where:游戏厂商,管理人员:工作地点;注册用户:随地 人员who:游戏厂商,管理人员,注册用户, What:游戏厂商:推广游戏,管理人员:扩大服务,盈利;注册人员:玩游戏。 Why:游戏厂商:推广力度不大,效果不好,管理人员:方便管理,注册用户:良好的游戏环境。 性能Performance:系统提供服务的效率,响应时间快,由于是手机端的APP吞吐量不需要太大。 成本Cost:实现系统需要付出的代价,耗费****元 时间Time:2016年6月3日 可靠性Reliability: 需要系统长时间正确运行的能力 安全性Security: 由于该平台会涉及资金的流动,所以需要对信息安全的保护能力。 合规性Compliance: 需要符合各种行业的标准,法律法规,规范。技术性Technology:要求基于安卓平台开发。 兼容性Compatibility:需要与一些支付平台进行兼容能力。还有对游戏的兼容性。 一.课程设计相关知识综述...................................................................... 1.1 研究目的及意义 (3) 1.2 数字图像处理研究的内容........................................................... 1.3 MATLAB 软件的介绍.................................................................. 1.3.1 MATLAB 语言的特点......................................................... 1.3.2 MATLAB 图像文件格式.................................................... 1.3.3 MATLAB 图像处理工具箱简介........................................ 1.3.4 MATLAB 中的图像类型.................................................... 1.3.5 MATLAB 的主要应用........................................................ 1.4 函数介绍........................................................................................ 二.课程设计内容和要求........................................................................... 2.1 主要研究内容................................................................................ 2.2 具体要求....................................................................................... 2.3 预期达到的目标........................................................................... 三.设计过程............................................................................................... 3.1 设计方案及步骤............................................................................ 3.2 程序清单及注释........................................................................... 3.3 实验结果........................................................................................ 四.团队情况................................................................................................ 五.总结....................................................................................................... 六.参考文献............................................................................................... 一.课程设计相关知识综述. 1.1研究目的及意义 算法分析大作业 动态规划方法解 乘法表问题和汽车加油行驶问题目录 1.动态规划解乘法表问题 1.1问题描述------ 1.2算法设计思想------ 1.3设计方法------ 1.4源代码------ 1.5最终结果------ 2.动态规划解汽车加油行驶问题 2.1问题描述------ 2.2算法设计思想------ 2.3设计方法------ 2.4源代码------ 2.5最终结果------ 3.总结 1.动态规划解决乘法表问题 1.1问题描述 定义于字母表∑{a,b,c)上的乘法表如表所示: 依此乘法表,对任一定义于∑上的字符串,适当加括号表达式后得到一个表达式。 例如,对于字符串x=bbbba,它的一个加括号表达式为(b(bb))(ba)。依乘法表,该表达式的值为a。 试设计一个动态规划算法,对任一定义于∑上的字符串x=x1x2…xn,计算有多少种不同的加括号方式,使由x导出的加括号表达式的值为a。 1.2算法设计思想 设常量a,b,c 分别为 1, 2 ,3 。n 为字符串的长度。 设字符串的第 i 到第 j 位乘积为 a 的加括号法有result[i][j][a] 种, 字符串的第 i 到第 j 位乘积为 b 的加括号法有result[i][j][b] 种, 字符串的第 i 到第 j 位乘积为 c 的加括号法有 result[i][j][c] 种。 则原问题的解是:result[i][n][a] 。 设 k 为 i 到 j 中的某一个字符,则对于 k 从 i 到 j :result[i][j][a] += result[i][k][a] * result[k + 1][j][c] + result[i][k][b] * result[k + 1][j][c] + result[i][k][c] * result[k + 1][j][a]; result[i][j][b] += result[i][k][a] * result[k + 1][j][a] + result[i][k][a] * result[k + 1][j][b] + result[i][k][b] * result[k + 1][j][b]; result[i][j][c] += result[i][k][b] * result[k + 1][j][a] + result[i][k][c] * result[k + 1][j][b] + result[i][k][c] * result[k + 1][j][c]; 《计算机系统结构》大作业 对并行算法的介绍和展望 专业计算机科学与技术 班级 111 学号 111425020133 姓名完颜杨威 日期 2014年4月17日 河南科技大学国际教育学院 对并行算法的介绍和展望 我们知道,算法是求解问题的方法和步骤。而并行算法就是用多台处理机联合求解问题的方法和步骤,其执行过程是将给定的问题首先分解成若干个尽量相互独立的子问题,然后使用多台计算机同时求解它,从而最终求得原问题的解。并行算法的研究涉及到理论、设计、实现、应用等多个方面,要保持并行算法研究的持续性和完整性,需要建立一套完整的“理论-设计-实现-应用”的学科体系,也就是所谓的并行算法研究的生态环境。其中,并行算法理论是并行算法研究的理论基础,包含并行计算模型和并行计算复杂性等;并行算法的设计与分析是并行算法研究的核心内容;并行算法的实现是并行算法研究的应用基础,包含并行算法实现的硬件平台和软件支撑技术等;并行应用是并行算法研究的发展动力,除了包含传统的科学工程计算应用外,还有新兴的与社会相关的社会服务型计算应用等。 并行算法主要分为数值计算问题的并行算法和非数值计算问题的并行算法。而并行算法的研究主要分为并行计算理论、并行算法的设计与分析、和并行算法的实现三个层次。现在,并行算法之所以受到极大的重视,是为了提高计算速度、提高计算精度,以及满足实时计算需要等。然而,相对于串行计算,并行计算又可以划分成时间并行和空间并行。时间并行即流水线技术,空间并行使用多个处理器执行并发计算,当前研究的主要是空间的并行问题。并行算法是一门还没有发展成熟的学科,虽然人们已经总结出了相当多的经验,但是远远不及串行算法那样丰富。并行算法设计中最常用的的方法是PCAM方法,即划分,通信,组合,映射。首先划分,就是将一个问题平均划分成若干份,并让各个处理器去同时执行;通信阶段,就是要分析执行过程中所要交换的数据和任务的协调情况,而组合则是要求将较小的问题组合到一起以提高性能和减少任务开销,映射则是要将任务分配到每一个处理器上。任何一个并行算法必须在一个科学的计算模型中进行设计。我们知道,任何算法必须有计算模型。任何并行计算模型必须要有为数不多、有明确定义的、可以定量计算的或者可以实际测量的参数,这些参数可以构成相应函数。并行计算模型是算法设计者与体系结构研究者之间的一个桥梁,是并行算法设计和分析的基础。它屏蔽了并行机之间的差异,从并行机中抽取若干个能反映计算特性的可计算或可测量的参数,并按照模型所定义的计算行为构造成本函数,以此进行算法的复杂度分析。 经过多年的发展,我国在并行算法的研究上也取得了显著进展,并行计算的应用已遍布天气预报、石油勘探、航空航天、核能利用、生物工程等领域,理论研究与应用普及均取得了很大发展。随着高性价比可扩展集群并行系统的逐步成熟和应用,大规模电力系统潮流并行计算和分布式仿真成为可能。目前,并行算法在地震数据处理中应用已较为成熟,近年来向更实用的基于PC机群的并行技术发展.然而,在非地震方法中,并行算法应用较少见文献报道,研究尚处于初级研究阶段。在大地电磁的二维和三维正、反演问题上,并行计算技术逐渐得到越来越多关注和重视.随着资源和能源需求的增长,地球物理勘探向深度和广度快速发展,大幅增长的数据量使得高性能并行计算机和高效的并行算法在勘探地球物理学中的发展和应用将占据愈来愈重要的地位。计算机技术在生物医学领域已经广泛应用,实践证明,并行算法在生物医学工程的各个领域中具有广泛的应用价值,能有效提高作业效率。随着电子科学技术的发展,电磁问题变得越来越复杂,为了在有限的计算机资源条件下求解大规模复杂电磁问题,许电磁学家已 课程设计实验体会 学生姓名:李祥胜 学生学号:20120704 专业班级:光信息科学与技术 指导老师:miss Chen 学院:信息工程学院 题目: MATLAB学期实验总结 MATLAB概念及介绍 MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 MATLAB和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。 MATLAB集成环境主要包括五个部分:MATLAB语言、MATLAB工作环境、句柄图形、MATLAB数学函数库和数学建模、小波分析、MATLAB API(App lication Program Interface)。MATLAB语言是以数组为基本数据单位,包括控制流程语句、函数、数据结构、输人输出及面向对象等特点的高级语言。利用SIMULINK对系统进行仿真与分析,在进入虚拟实验环境后,不需要书写代码,只需使用鼠标拖动库中的功能模块并将它们连接起来,再按照实验要求修改各元器件的参数。通过虚拟实验环境建立实验仿真电路模型,可使一些枯燥的电路变得有趣味,复杂的波形变得形象生动,使得各种复杂的能量转换过程比较直观地呈现。 1.1、MATLAB语言特点及优势 1.1.1、语言特点 MATLAB被称为第四代计算机语言,利用其丰富的函数资源,使编程人员从繁琐的程序代码中解放出来。MATLAB的最突出的特点就是简洁。MATLAB用更直观的、符合人们思维习惯的代码,代替了C和FORTRAN语言的冗长代码。MATLAB 给用户带来的是最直观、最简洁的程序开发环境。以下简单介绍一下MATLAB的主要特点。 (1)语言简洁紧凑,使用方便灵活,库函数极其丰富。MATLAB程序书写形式自由,利用其丰富的库函数避开繁杂的子程序编程任务,压缩了一切不必要的编程工作。由于库函数都由本领域的专家编写,用户不必担心函数的可靠性。 (2)运算符丰富。由于MATLAB是用C语言编写的,MATLAB提供了和C语言几乎一样多的运算符,灵活使用MATLAB的运算符将使程序变得极为简短,具体运算符见附表。 (3)MATLAB既具有结构化的控制语句(如for循环、while循环、break语句和if语句),又有面向对象编程的特性。 (4)语法限制不严格,程序设计自由度大。例如,在MATLAB里,用户无需对矩阵预定义就可使用。 (5)程序的可移植性很好,基本上不做修改就可以在各种型号的计算机和操作系统上运行。实验 6 极点配置与全维状态观测器的设计(优.选)
MATLAB课程设计报告
MATLAB课设报告
Matlab课程设计报告
《程序设计与算法综合实践》期末大作业题目及评分标准
7状态空间设计法极点配置观测器解析
matlab课程设计题目全
matlab课程设计拟定题目
软件系统分析与设计大作业
MATLAB课程设计报告图像处理
算法分析大作业动态规划方法解乘法表问题和汽车加油行驶问题#精选.
对并行算法的介绍和展望——学期大作业
MATLAB课程设计实验体会