S7-200指令大全

第5章数据处理、运算指令及应用
本章要点
●数据传送、字节交换、字节立即读写、移位、转换指令的介绍、应用及实训
●算术运算、逻辑运算、递增/递减指令的介绍、应用及实训
●表的定义、填表指令、表取数指令、填充指令、表查找指令的介绍
5.1 数据处理指令
5.1.1 数据传送指令
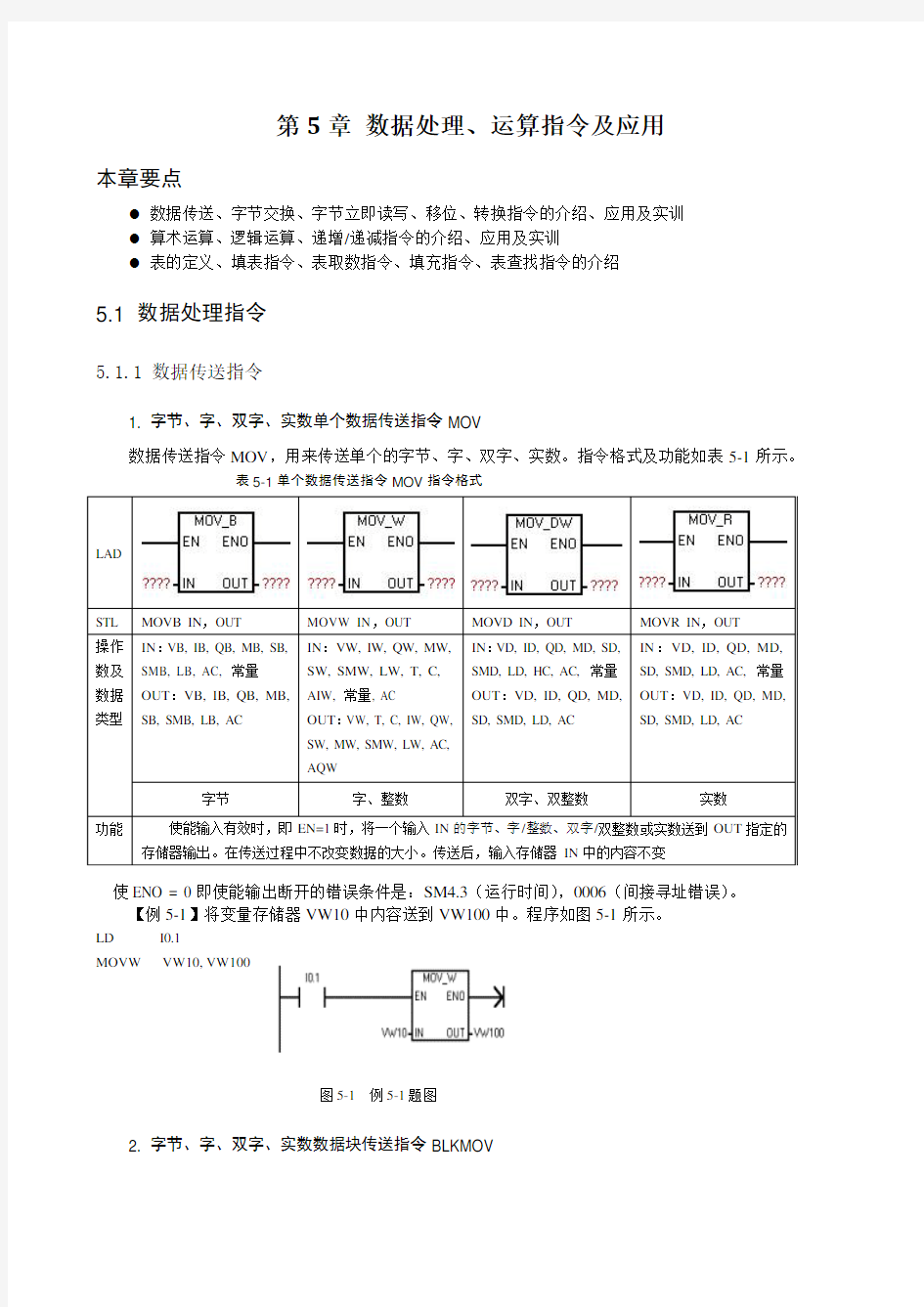
1. 字节、字、双字、实数单个数据传送指令MOV
数据传送指令MOV,用来传送单个的字节、字、双字、实数。指令格式及功能如表5-1所示。
表5-1单个数据传送指令MOV指令格式
使ENO = 0即使能输出断开的错误条件是:SM4.3(运行时间),0006(间接寻址错误)。
【例5-1】将变量存储器VW10中内容送到VW100中。程序如图5-1所示。
LD I0.1
MOVW VW10, VW100
图5-1 例5-1题图
2. 字节、字、双字、实数数据块传送指令BLKMOV
数据块传送指令将从输入地址IN 开始的N 个数据传送到输出地址OUT 开始的N 个单元中,N 的范围为1至255,N 的数据类型为:字节。指令格式及功能如表5-2所示。
表5-2 数据传送指令BLKMOV 指令格式
使ENO = 0的错误条件:0006(间
接寻址错误)0091(操作数超出范围)。
【例5-2】程序举
例:将变量存
储器VB20开
始的4个字节
(VB20-
VB23)中的数据,移至VB100开始的4个字节中(VB100-VB
103)。程序
如图5-2所示。
LAD STL
LD I0.0
BMB VB20 ,VB100, 4
图5-2 例5-2图
程序执行后,将VB20~VB23中的数据30、31、32、33送到VB100~VB103。 执行结果如下:数组1数据 30 31 32 33
数据地址 VB20 VB21 VB22 VB23
块移动执行后:数组2数据 30 31 32 33
数据地址 VB100 VB101 VB102 VB103
5.1.2 字节交换、字节立即读写指令
1. 字节交换指令
字节交换指令用来交换输入字IN 的最高位字节和最低位字节。指令格式如表5-3所示。
表5-3 字节交换指令使用格式及功能
【例5-3】字节交换指令应用举例。如图5-3所示。
程序执行结果:
指令执行之前VW50中的字为:D6 C3
指令执行之后VW50中的字为:C3 D6
2. 字节立即读写指令
字节立即读指令(MOV-BIR)读取实际输入端IN给出的1个字节的数值,并将结果写入OUT所指定的存储单元,但输入映像寄存器未更新。
字节立即写指令从输入IN所指定的存储单元中读取1个字节的数值并写入(以字节为单位)实际输出OUT端的物理输出点,同时刷新对应的输出映像寄存器。指令格式及功能如表5-4所示。
表5-4字节立即读写指令格式
使ENO = 0的错误条件:0006(间接寻址错误),SM4.3(运行时间)。注意:字节立即读写指令无法存取扩展模块。
5.1.3 移位指令及应用举例
移位指令分为左、右移位和循环左、右移位及寄存器移位指令三大类。前两类移位指令按移位数据的长度又分字节型、字型、双字型3种。
1. 左、右移位指令
左、右移位数据存储单元与SM1.1(溢出)端相连,移出位被放到特殊标志存储器SM1.1位。移位数据存储单元的另一端补0。移位指令格式见表5-5。
(1)左移位指令(SHL)
使能输入有效时,将输入IN的无符号数字节、字或双字中的各位向左移N位后(右端补0),将结果输出到OUT所指定的存储单元中,如果移位次数大于0,最后一次移出位保存在“溢出”存储器位SM1.1。如果移位结果为0,零标志位SM1.0置1。
(2)右移位指令
使能输入有效时,将输入IN的无符号数字节、字或双字中的各位向右移N位后,将结果输出到OUT 所指定的存储单元中,移出位补0,最后一移出位保存在SM1.1。如果移位结果为0,零标志位SM1.0置1。
(3)使ENO = 0的错误条件:0006(间接寻址错误),SM4.3(运行时间)
表5-5 移位指令格式及功能
STL指令中,若
IN和OUT指定
的存储器不同,
则须首先使用
数据传送指令
MOV将IN中
的数据送入
OUT所指定的
存储单元。如:
OVB IN,OUT
LB OUT,N
2. 循环
左、右移位指令
循环移位
将移位数据存
储单元的首尾
相连,同时又与溢出标志SM1.1连接,SM1.1用来存放被移出的位。指令格式见表5-6。
(1)循环左移位指令(ROL)
使能输入有效时,将IN输入无符号数(字节、字或双字)循环左移N位后,将结果输出到OUT所指定的存储单元中,移出的最后一位的数值送溢出标志位SM1.1。当需要移位的数值是零时,零标志位SM1.0为1。
(2)循环右移位指令(ROR)
使能输入有效时,将IN输入无符号数(字节、字或双字)循环右移N位后,将结果输出到OUT所指定的存储单元中,移出的最后一位的数值送溢出标志位SM1.1。当需要移位的数值是零时,零标志位SM1.0为1。
(3)移位次数N≥数据类型(B、W、D)时的移位位数的处理
如果操作数是字节,当移位次数N≥8时,则在执行循环移位前,先对N进行模8操作(N除以8后取余数),其结果0-7为实际移动位数。
如果操作数是字,当移位次数N≥16时,则在执行循环移位前,先对N进行模16操作(N除以16后取余数),其结果0-15为实际移动位数。
如果操作数是双字,当移位次数N≥32时,则在执行循环移位前,先对N进行模32操作(N除以32
后取余数),其结果0-31为实际移动位数。
(4)使ENO = 0的错误条件:0006(间接寻址错误),SM4.3(运行时间)。
表5-6 循环左、右移位指令格式及功能
说明:在
STL指令中,若
IN和OUT指定
的存储器不同,
则须首先使用
数据传送指令
MOV将IN中
的数据送入
OUT所指定的
存储单元。如:
MOVB IN,
OUT
LB OUT,N
【例5-4】程序
应用举例,将
AC0中的字循
环右移2位,将
VW200中的字
左移3位。程序
及运行结果如图5-4所示。
图5-4 例5-4题图
【例5-5】用I0.0控制接在Q0.0~Q0.7上的8个彩灯循环移位,从左到右以0.5s的速度依次点亮,保持任意时刻只有一个指示灯亮,到达最右端后,再从左到右依次点亮。
分析:8个彩灯循环移位控制,可以用字节的循环移位指令。根据控制要求,首先应置彩灯的初始状态为QB0=1,即左边第一盏灯亮;接着灯从左到右以0.5s的速度依次点亮,即要求字节QB0中的“1”用循环左移位指令每0.5s移动一位,因此须在ROL-B指令的EN端接一个0.5s
的移位脉冲(可用定时器指
图5-5 例5-5题图
令实现)。梯形图程序和语句表程序如图5-5所示。
LD SM0.1 //首次扫描时
MOVB 1, QB0 //置8位彩灯初态
LD I0.0 //T37产生周期为
AN T37 0.5s的移位脉冲
TON T37, +5
LD T37 //每来一个脉冲
RLB QB0, 1 彩灯循环左移1位
3. 移位寄存器指令(SHRB)
移位寄存器指令是可以指定移位寄存器的长度和移位方向的移位指令。其指令格式如图5-6所示。
说明:(1)移位寄存器指令SHRB将DA TA数值移入移位寄存器。梯形图中,EN为使能输入端,连接移位脉冲信号,每次使能有效时,整个移位寄存器移动1位。DATA为数据输入端,连接移入移位寄存器的二进制数值,执行指令时将该位的值移入寄存器。S_BIT指定移位寄存器的最低位。N指定移位寄存器的长度和移位方向,移位寄存器的最大长度为64位,N为正值表示左移位,输入数据(DA TA)移入移位寄存器的最低位(S_BIT),并移出移位寄存器的最高位。移出的数据被放置在溢出内存位(SM1.1)中。N为负值表示右移位,输入数据移入移位寄存器的最高位中,并移出最低位(S_BIT)。移出的数据被放置在溢出内存位(SM1.1)中。
(2)DA TA和S-BIT的操作数为I, Q, M, SM, T, C, V, S, L 。数据类型为:BOOL变量。N的操作数为VB, IB, QB, MB, SB, SMB, LB, AC, 常量。数据类型为:字节。
(3)使ENO = 0的错误条件:0006(间接地址),0091(操作数超出范围),0092(计数区错误)。
(4)移位指令影响特殊内部标志位:SM1.1(为移出的位值设置溢出位)。
【例5-6】移位寄存器应用举例。程序及运行结果如图5-7所示。
溢出位(SM1.1)
S-BIT
I0.1
S-BIT
I0.1
S-BIT
I0.1
溢出位(SM1.1)
溢出位(SM1.1)
溢出位
第一次移位
第一次移位后
第二次移位后
第一次移位前
时序图
MB10
MB10
MB10
I0.0
I0.1
图5-7 例5-6梯形图、语句表、时序图及运行结果
【例5-7】用PLC构成喷泉的控制。用灯L1~L12分别代表喷泉的12个喷水注。
(1)控制要求:按下起动按钮后,隔灯闪烁,L1亮0.5秒后灭,接着L2亮0.5秒后灭,接着L3亮0.5秒后灭,接着L4亮0.5秒后灭,接着L5、L9亮0.5秒后灭,接着L6、L10亮0.5秒后灭,接着L7、L11亮0.5秒后灭,接着L8、Array
L12亮0.5秒后灭,L1亮0.5秒后灭,如此循环下去,直至按下
停止按钮。如图5-8所示。
图5-8 喷泉控制示意图
(2)I/O分配
输入输出
(常开)起动按钮:I0.0 L1:Q0.0 L5、L9:Q0.4
(常闭)停止按钮:I0.1 L2:Q0.1 L6、L10:Q0.5
L3:Q0.2 L7、L11:Q0.6
L4:Q0.3 L8、L12:Q0.7
(3)喷泉控制梯形图
梯形图程序如图5-10所示。
分析:应用移位寄存器控制,根据喷泉模拟控制的8位输出(Q0.0~Q0.7),须指定一个8位的移位
寄存器(M10.1~M11.0),移位寄存器的S-BIT位为M10.1,并且移位寄存器的每一位对应一个输出。如
图5-9所示。
DATA
图5-9 移位寄存器的位与输出对应关系图
在移位寄存器指令中,EN连接移位脉冲,每来一个脉冲的上升沿,移位寄存器移动一位。移位寄存器应0.5s移一位,因此需要设计一个0.5s产生一个脉冲的脉冲发生器(由T38构成)。
M10.0为数据输入端DATA ,根据控制要求,每次只有一个输出,因此只需要在第一个移位脉冲到来时由M10.0送入移位寄存器S-BIT位(M10.1)一个“1”,第二个脉冲至第八
T38构成0.5s产生一个机器扫描周期脉冲的脉冲发生器
8位的移位寄存器
移位寄存器的每一位
对应一个输出
图5-10 例5-7喷泉模拟控制梯形图
个脉冲到来时由M10.0送入M10.1的值均为“0”,这在程序中由定时器T37延时0.5s导通一个扫描周期实现,第八个脉冲到来时M11.0置位为1,同时通过与T37并联的M11.0常开触点使M10.0置位为1,在第九个脉冲到来时由M10.0送入M10.1的值又为1,如此循环下去,直至按下停止按钮。按下常闭停止按钮(I0.1),其对应的常闭触点接通,触发复位指令,使M10.1~M11.0的8位全部复位。
5.1.4 转换指令
转换指令是对操作数的类型进行转换,并输出到指定目标地址中去。转换指令包括数据的类型转换、数据的编码和译码指令以及字符串类型转换指令。
不同功能的指令对操作数要求不同。类型转换指令可将固定的一个数据用到不同类型要求的指令中,包括字节与字整数之间的转换,整数与双整数的转换,双字整数与实数之间的转换,BCD码与整数之间的转换等。
1. 字节与字整数之间的转换
字节型数据与字整数之间转换的指令格式见表5-7所示。
表5-7 字节型数据与字整数之间转换指令
2. 字整数与双字整数之间的转换
字整数与双字整数之间的转换格式、功能及说明,如表5-8所示。
3. 双整数与实数之间的转换
双整数与实数之间的转换的转换格式、功能及说明,如表5-9所示。
表5-8 字整数与双字整数之间的转换指令
表5-9 双字整数与实数之间的转换指令
值得注意的是:不论是四舍五入取整,还是截位取整,如果转换的实数数值过大,无法在输出中表示,则产生溢出,即影响溢出标志位,使SM1.1=1,输出不受影响。
4. BCD码与整数的转换
BCD码与整数之间的转换的指令格式、功能及说明,如表5-10所示。
表5-10 BCD码与整数之间的转换的指令
注意:(1)数据长度为字的BCD格式的有效范围为:0~9999(十进制),0000~9999(十六进制)0000 0000 0000 0000~1001 1001 1001 1001(BCD码)。
(2)指令影响特殊标志位SM1.6(无效BCD)。
(3)在表5-10的LAD和STL指令中,IN和OUT的操作数地址相同。若IN和OUT操作数地址不是同一个存储器,对应的语句表指令为:MOV IN OUT
BCDI OUT
5. 译码和编码指令
译码和编码指令的格式和功能如表5-11所示。
表5-11 译码和编码指令的格式和功能
若(AC2)=2,执行译码指令,则将输出字VW40的第二位置1,VW40中的二进制数为2#0000 0000 0000 0100;若(AC3)=2#0000 0000 0000 0100,执行编码指令,则输出字节VB50中的错误码为2。
6. 七段显示译码指令
图5-12 与七段显示码对
应的代码
七段显示器的
abcdefg段分别对应于
字节的第0位~第6位,
字节的某位为1时,其
对应的段亮;输出字节的某位为0时,其对应的段暗。将字节的第7位补0,则构成与七段显示器相对应的8位编码,称为七段显示码。数字0~9、字母A~F与七段显示码的对应如图5-12所示。
七段译码指令SEG将输入字节16#0~F转换成七段显示码。指令格如表5-12所示。
表5-12七段显示译码指令
使ENO = 0的错误条件:0006 间接地址,SM4.3 运行时间。
【例5-9】编写显示数字0的七段显示码的程序。程序实现如图5-13所示。
LD I0.1
SEG 0, AC1
图5-13 例5-9题图
程序运行结果为AC1中的值为16#3F(2#0011 1111)。
7. ASCII码与十六进制数之间的转换指令
ASCII码与十六进制数之间的转换指令指令格式和功能如表5-13所示。
表5-13 ASCII码与十六进制数之间转换指令的格式和功能
包含非法的ASCII码,则终止转换操作,特殊内部标志位SM1.7置位为1。
【例5-10】将VB10~VB12中存放的3个ASCII码33、45、41,转换成十六进制数。
梯形图和语句表程序如图5-14所示。
LD I1.0
ATH VB10, VB20, 3
图5-14 例5-10题图
程序运行结果如下:
可见将VB10~VB12中存放的3个ASCII码33、45、41,转换成十六进制数3E和Ax ,放在VB20和VB21中,“x”表示VB21的“半字节”即低四位的值未改变。
5.1.5天塔之光的模拟控制实训
1. 实训目的
(2)用移位寄存器指令实现天塔之光控制系统
(3)掌握PLC的编程技巧和程序调试的方法
2.控制要求
如图5-15所示的天塔的灯光,可以用PLC控制灯光的闪耀移位
及时序的变化等。控制要求如下:按起动按钮,L12→L11→L10→L8
→L1→L1、L2、L9→L1、L5、L8→L1、L4、L7→L1、L3、L6→L1
→L2、L3、L4、L5→L6、L7、L8、L9→L1、L2、L6→L1、L3、L7
→L1、L4、L8→L1、L5、L9→L1→L2、L3、L4、L5→L6、L7、L8、
L9→L12→L11→L10 ……循环下去,直至按下停止按钮。
3.I/O分配
输入输出
起动按钮:I0.0 L1:Q0.0 L4 Q0.3 L7:Q0.6
L10 Q1.1
停止按钮:I0.1 L2:Q0.1 L5 Q0.4 L8:Q0.7
L11 Q1.2
L3:Q0.2 L6 Q0.5 L9:Q1.0
L12 Q1.3
4. 程序设计
分析:根据灯光闪亮移位,分为19步,因此可以指定一个19位的移位寄存器(M10.1~M10.7,M11.0~
M11.7,M12.0~M12.3),移位寄存器的每一位对应一步。而对于输出,如:L1(Q0.0)分别在“5、6、7、8、9、10、13、14、15、16、17”步时被点亮,即其对应的移位寄存器位“M10.5、M10.6、M10.7、M11.0、M11.1、M11.2、M11.5、M11.6、M12.0、M12.1”置位为1时,Q0.0置位为1,所以需要将这些位所对应
的常开触点并联后输出Q0.0,以此类推其它的输出。参考程序如图5-16所示。
图5-16天塔之光控制梯形图
图5-16 天塔之光控制梯形图(续)5. 输入、调试程序并运行程序
6. 思考题
如果控制要求改为L12→L11→L10→L8→L1→L2、L3、L4、L5→L6、L7、L8、L9,循环如何修改程序。输入程序,调试观察现象。
5.2 算术运算、逻辑运算指令
算术运算指令包括加、减、乘、除运算和数学函数变换,逻辑运算包括逻辑与或非指令等。
5.2.1 算术运算指令
1. 整数与双整数加减法指令
整数加法(ADD-I)和减法(SUB-I)指令是:使能输入有效时,将两个16位符号整数相加或相减,并产生一个16位的结果输出到OUT。
双整数加法(ADD-D)和减法(SUB-D)指令是:使能输入有效时,将两个32位符号整数相加或相减,并产生一个32位结果输出到OUT。
整数与双整数加减法指令格式如表5-14所示。
表5-14 整数与双整数加减法指令格式
(1)当IN1、IN2和OUT操作数的地址不同时,在STL指令中,首先用数据传送指令将IN1中的数值送入OUT,然后再执行加、减运算即:OUT+IN2=OUT、OUT-IN2=OUT。为了节省内存,在整数加法的梯形图指令中,可以指定IN1或IN2=OUT,这样,可以不用数据传送指令。如指定INI=OUT,则语句表指令为:+I IN2,OUT;如指定IN2=OUT,则语句表指令为:+I IN1,OUT。在整数减法的梯形图指令中,可以指定IN1=OUT,则语句表指令为:-I IN2,OUT。这个原则适用于所有的算术运算指令,且乘法和加法对应,减法和除法对应。
(2)整数与双整数加减法指令影响算术标志位SM1.0(零标志位),SM1.1(溢出标志位)和SM1.2(负数标志位)。
【例5-11】求5000加400的和,5000在数据存储器VW200中,结果放入AC0。程序如图5-17所示。
LD I0.0
MOVW VW200, AC0 //VW200→AC0
+I +400, AC0 //VW200+400=AC0
图5-17 例5-11题图
2. 整数乘除法指令
整数乘法指令(MUL-I)是:使能输入有效时,将两个16位符
号整数相乘,并产生一个16位积,从OUT指定的存储单元输出。
整数除法指令(DIV-I)是:使能输入有效时,将两个16位符号整数相除,并产生一个16位商,从OUT指定的存储单元输出,不保留余数。如果输出结果大于一个字,则溢出位SM1.1置位为1。
双整数乘法指令(MUL-D):使能输入有效时,将两个32位符号整数相乘,并产生一个32位乘积,从OUT指定的存储单元输出。
双整数除法指令(DIV-D):使能输入有效时,将两个32位整数相除,并产生一个32位商,从OUT 指定的存储单元输出,不保留余数。
整数乘法产生双整数指令(MUL):使能输入有效时,将两个16位整数相乘,得出一个32位乘积,从OUT指定的存储单元输出。
整数除法产生双整数指令(DIV):使能输入有效时,将两个16位整数相除,得出一个32位结果,从OUT指定的存储单元输出。其中高16位放余数,低16位放商。
整数乘除法指令格式如表5-15所示。
整数双整数乘除法指令操作数及数据类型和加减运算的相同。
整数乘法除法产生双整数指令的操作数:IN1/IN2:VW, IW, QW, MW, SW, SMW, T, C, LW, AC, AIW, 常量, *VD, *LD, *AC。数据类型:整数。
OUT:VD, ID, QD, MD, SMD, SD, LD, AC, *VD, *LD, *AC 。数据类型:双整数。
使ENO = 0的错误条件:0006(间接地址),SM1.1(溢出),SM1.3(除数为0)。
对标志位的影响:SM1.0(零标志位),SM1.1(溢出),SM1.2(负数),SM1.3(被0除)。
表5-15 整数乘除法指令格式
LD I0.0
MUL AC1 VD100
DIV VW10 VD200
搜索引擎大全
搜索引擎大全 1.科技名词定义 中文名称:搜索引擎大全 英文名称:search engine collection 定义:万维网环境中的各大搜索引擎的集合。 产生背景:搜索引擎(search engine)是指根据一定的策略、运用特定的计算机程序从互联网上搜集信息,在对信息进行组织和处理后,为用户提供检索服务,将用户检索相关的信息展示给用户的系统。由于各大搜索引擎采用的算法不同,对于相同关键词的返回存在较大区别,因此各位搜索引擎蓬勃发展。 2.搜索引擎大全 1.1中文搜索引擎大全 1.2.1Google简体中文 LOGO: 网址:https://www.360docs.net/doc/7716231908.html,/ 简介:Google 的使命是整合全球范围的信息,使人人皆可访问并从中受益。完成该使命的第一步就是Google 的创始人Larry Page 和Sergey Brin 共同开发的全新的在线搜索引擎。该技术诞生于斯坦福大学的一个学生宿舍里,然后迅速传播到全球的信息搜索者。Google 目前被公认为全球最大的搜索引擎,它提供了简单易用的免费服务,用户可以在瞬间返回相关的搜索结果。 在访问Google 主页时,您可以使用多种语言查找信息、查看新闻标题、搜索超过10 亿幅的图片,并能够细读全球最大的Usenet 消息存档,其中提供的帖子超过10 亿个,时间可以追溯到1981 年。 1.2.2百度
LOGO: 网址:https://www.360docs.net/doc/7716231908.html, 简介:百度搜索引擎拥有目前世界上最大的中文搜索引擎,总量超过3亿页以上,并且还在保持快速的增长。百度搜索引擎具有高准确性、高查全率、更新快以及服务稳定的特点,能够帮助广大网民快速的在浩如烟海的互联网信息中找到自己需要的信息,因此深受网民的喜爱。 1.2.3雅虎 LOGO: 网址:https://www.360docs.net/doc/7716231908.html,/ 简介:2005年11月9日阿里巴巴公司在完成对雅虎中国的收购与整合之后,重新发布了进入中国市场7年之久的雅虎网站, 未来雅虎在中国的业务重点方向将全面转向搜索领域,这也是自8月11日阿里巴巴宣布收购雅虎中国时就从没改变的方向。阿里巴巴CEO马云表示: 阿里巴巴在搜索领域既有决心更有信心,在中国,雅虎就是搜索,搜索就是雅虎。 雅虎搜索引擎入门到精通 1.2.4一起搜 LOGO: 网址:https://www.360docs.net/doc/7716231908.html, 简介:一起搜【https://www.360docs.net/doc/7716231908.html,】——让你体验一站式搜索的乐趣!该站为引擎搜索大全,集合全世界最大的搜索引擎,有百度搜索引擎,谷歌搜索引擎,狗狗搜索引擎,迅雷搜索引擎,雅虎搜索引擎,必应搜索引擎,搜搜搜索引擎您现在不必再为收藏太多的搜索引擎大全页而烦恼了,您只需收藏本页就足够了,希望您会喜欢本搜索引擎大全,因为这里有非常齐全的搜索引擎入口,方便您搜索各种各样的资源! 1.2.5中国搜索 LOGO: 网址:https://www.360docs.net/doc/7716231908.html,/ 简介:2003年12月23日,刚刚上市的慧聪国际集团重拳出击,原慧聪搜索正式独立运做,成立了中国搜索,全力打造中文搜索第一品牌。
安全型西门子PLC的功能特点
与普通西门子PLC不同,安全PLC不仅可提供普通西门子PLC的功能,更可实现安全控制功能,符合ENISO13849-1以及 IEC61508等控制系统安全相关部件标准的要求。安全西门子PLC中所有元器件采用的是冗余多样性结构,两个处理器处理时进行交叉检测,每个处理器的处理结果储存在各自内存中,只有处理结果完全一致时才会进行输出,如果处理期间出现任何不一致,系统立即停机。 此外,在软件方面,安全西门子PLC提供的相关安全功能块,如急停、安全门、安全光栅等均经过认证并加密,用户仅需调用功能块进行相关功能配置即可,保证了用户在设计时不会因为安全功能上的程序漏洞而导致安全功能丢失。 在设计安全西门子PLC时,要考虑到很多因素,需要很多的特殊设计。比如:一台TPC1162HI更强调内部诊断,结合硬件和软件,可以让设备随时检测自身工作状态的不适;一台安全西门子PLC具有的软件,要使用一系列的特殊技术,能确保软件的可靠性;一台安全西门子PLC具有冗余功能,即使一部分失效,也能够维持系统运行;一台安全西门子PLC还具有外加的安全机制,不允许通过数字通信接口随便读写内部的数据。 安全西门子PLC与常规西门子PLC的不同还在于:安全西门子PLC需要得到第三方专业机构的安全认证,满足苛刻的安全性和可靠性国际标准。必须彻底地采用系统方法,来设计和测试安全西门子PLC。德国的TUV专家和美国的FM 专家会提供对安全西门子PLC设计和测试过程的、第三方独立的确认和验证, 特殊的电子线路,细致的诊断软件分析,再加上对所有可能失效进行测试的完整性设计,确保了安全西门子PLC具有测定99%以上的内部元件潜在危险失效的能力。一种失效模式、影响和诊断分析(FMEDA)方法一直指导着设计,这种方法会指出每个元件是怎样引起系统失效。MT6100IV5的工程师会亲自执行失效测试,把它作为他们认证过程的一个部分。 严格的国际标准软件应用于安全西门子PLC。这些标准需要特殊技术,避免复杂性。更进一步的分析和测试,细致地检查操作系统的任务交互操作。这种测试包括实时的交互操作,比如多任务(当使用时)和中断。还需要进行一种特殊的诊断,被称为“程序流控制” 和“数据确认”。程序流检查能确保基本功能能按正确的顺序执行,数据确认使所有的关键数据在存储器里进行冗余存储,并且在使用前进行有效性测试。在软件开发过程中,一个安全西门子PLC需要附加的软件测试技术。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有 10年工业用品电子商务领域研究,以
x86汇编指令集
x86汇编指令集 数据传输指令它们在存贮器和寄存器、寄存器和输入输出端口之间传送数据. 1. 通用数据传送指令. MOV 传送字或字节. MOVSX 先符号扩展,再传送. MOVZX 先零扩展,再传送. MOVSX reg16,r/m8 ; o16 0F BE /r [386] MOVSX reg32,r/m8 ; o32 0F BE /r [386] MOVSX reg32,r/m16 ; o32 0F BF /r [386] MOVZX reg16,r/m8 ; o16 0F B6 /r [386] MOVZX reg32,r/m8 ; o32 0F B6 /r [386] MOVZX reg32,r/m16 ; o32 0F B7 /r [386] PUSH 把字压入堆栈. POP 把字弹出堆栈. PUSHA 把AX,CX,DX,BX,SP,BP,SI,DI依次压入堆栈. POPA 把DI,SI,BP,SP,BX,DX,CX,AX依次弹出堆栈.
PUSHAD 把EAX,ECX,EDX,EBX,ESP,EBP,ESI,EDI依次压入堆栈. POPAD 把EDI,ESI,EBP,ESP,EBX,EDX,ECX,EAX依次弹出堆栈. BSWAP 交换32位寄存器里字节的顺序 XCHG 交换字或字节.( 至少有一个操作数为寄存器,段寄存器不可作为操作数) CMPXCHG 比较并交换操作数.( 第二个操作数必须为累加器AL/AX/EAX ) XADD 先交换再累加.( 结果在第一个操作数里) XLAT 字节查表转换. ── BX 指向一张256 字节的表的起点, AL 为表的索引值(0-255,即 0-FFH); 返回AL 为查表结果. ( [BX+AL]->AL ) 2. 输入输出端口传送指令. IN I/O端口输入. ( 语法: IN 累加器, {端口号│DX} ) OUT I/O端口输出. ( 语法: OUT {端口号│DX},累加器) 输入输出端口由立即方式指定时, 其范围是0-255; 由寄存器DX 指定时, 其范围是0-65535. 3. 目的地址传送指令. LEA 装入有效地址. 例: LEA DX,string ;把偏移地址存到DX. LDS 传送目标指针,把指针内容装入DS. 例: LDS SI,string ;把段地址:偏移地址存到DS:SI. LES 传送目标指针,把指针内容装入ES. 例: LES DI,string ;把段地址:偏移地址存到ES:DI. LFS 传送目标指针,把指针内容装入FS.
红米指令大全,绝对有用
红米指令大全,绝对有用 1.*#*#7780#*#* 重设为原厂设定,不会删除预设程序,及SD卡档案。 2.*2767*3855# 重设为原厂设定,会删除SD卡所有档案。 3.*#*#34971539#*#* 显示相机相机韧体版本,或更新相机韧体 4.*#*#7594#*#*当长按关机按钮时,会出现一个切换手机模式的窗口,包括:静音模式、飞航模式及关机,你可以用以上代码,直接变成关机按钮。 5.*#*#4636#*#*显示手机信息、电池信息、电池记录、使用统计数据、WiFi信息 6.*#*#273283*255*663282*#*#*开启一个能让你备份媒体文件的地方,例如相片、声音及影片等! 7.*#*#197328640#*#*启动服务模式,可以测试手机部分设置及更改设定WLAN、GPS及蓝牙测试的代码 8.*#*#232339#*#*或*#*#526#*#*或*#*#528#*#*–WLAN测试 9.*#*#232338#*#*–显示WiFiMAC地址 10.*#*#1472365#*#*–GPS测试 11.*#*#1575#*#*–其它GPS测试, 12.*#*#232331#*#*–蓝牙测试 13.*#*#232337#*#–显示蓝牙装置地址 14.*#*#8255#*#*启动GTalk服务监视器显示手机软件版本的代码 15.*#*#4986*2650468#*#*–PDA、Phone、H/W、RFCallDate 16.*#*#1234#*#*–PDA及Phone 17.*#*#1111#*#*–FTASW版本, 18.*#*#2222#*#*–FTAHW版本 19.*#*#44336#*#*–PDA、Phone、csc、buildTime、https://www.360docs.net/doc/7716231908.html,、changelistnumber各项硬件测试 20.*#*#0283#*#*–PacketLoopback+ 21.*#*#0*#*#*–LCD测试 22.*#*#0673#*#*或*#*#0289#*#*–Melody测试 23.*#*#0842#*#*–装置测试,例如振动、亮度 24.*#*#2663#*#*–触控屏幕版本" 25.*#*#2664#*#*–触控屏幕测试 26.*#*#0588#*#*–接近感应器测试 27.*#*#3264#*#*–内存版本
搜索引擎命令大全
搜索引擎命令大全 -seoerboy分享-觉得好就收藏 1、双引号 把搜索词放在双引号中,代表完全匹配搜索,也就是说搜索结果返回的页面包含双引号中出现的所有的词,连顺序也必须完全匹配。百度和Google 都支持这个指令。例如搜索:“企业SEO” 2、减号 减号代表搜索不包含减号后面的词的页面。使用这个指令时减号前面必须是空格,减号后面没有空格,紧跟着需要排除的词。Google 和百度都支持这个指令。 例如:搜索-引擎 返回的则是包含“搜索”这个词,却不包含“引擎”这个词的结果 3、星号 星号*是常用的通配符,也可以用在搜索中。百度不支持*号搜索指令。 比如在Google 中搜索:搜索*擎 其中的*号代表任何文字。返回的结果就不仅包含“搜索引擎”,还包含了“搜索收擎”,“搜索巨擎”等内容。 4、inurl inurl: 指令用于搜索查询词出现在url 中的页面。百度和Google 都支持inurl 指令。inurl 指令支持中文和英文。 比如搜索:inurl:搜索引擎优化 返回的结果都是网址url 中包含“搜索引擎优化”的页面。由于关键词出现在url 中对排名有一定影响,使用inurl:搜索可以更准确地找到竞争对手。 5、inanchor inanchor:指令返回的结果是导入链接锚文字中包含搜索词的页面。百度不支持inanchor。比如在Google 搜索:inanchor:点击这里 返回的结果页面本身并不一定包含“点击这里”这四个字,而是指向这些页面的链接锚文字中出现了“点击这里”这四个字。 可以用来找到某个关键词的竞争对收,而且这些竞争对手往往是做过SEO 的。研究竞争对手页面有哪些外部链接,就可以找到很多链接资源。 6、intitle intitle: 指令返回的是页面title 中包含关键词的页面。Google 和百度都支持intitle 指令。使用intitle 指令找到的文件是更准确的竞争页面。如果关键词只出现在页面可见文字中,而没有出现在title 中,大部分情况是并没有针对关键词进行优化,所以也不是有力的竞争对手。
汇编语言知识大全
第一章基础知识: 一.机器码:1.计算机只认识0,1两种状态。而机器码只能由0,1组成。故机器码相当难认,故产生了汇编语言。 2.其中汇编由三类指令形成:汇编指令(有机器码对应),伪指令,其他符号(编译的时候有用)。 每一总CPU都有自己的指令集;注意学习的侧重点。 二.存储器:1.存储单元中数据和指令没任何差别。 2.存储单元:Eg:128个储存单元(0~127)128byte。 线: 1.地址总线:寻址用,参数(宽度)为N根,则可以寻到2^N个内存单元。 据总线:传送数据用,参数为N根,一次可以传送N/8个存储单元。 3.控制总线:cpu对元器件的控制能力。越多控制力越强。 四.内存地址空间:1.由地址总线决定大小。 2.主板:cpu和核心器件(或接口卡)用地址总线,数据总线,控制总 线连接起来。 3.接口卡:由于cpu不能直接控制外设,需通过接口卡间接控制。
4.各类存储器芯片:RAM,BIOS(主板,各芯片)的ROM,接卡槽的 RAM CPU在操控他们的时候,把他们都当作内存来对待,把他们总的看作一个由 若干个存储单元组成的逻辑存储器,即我们所说的内存地址空间。 自己的一点理解:CPU对内存的操作是一样的,但是在cpu,内存,芯片之间的硬件本身所牵扯的线是不同的。所以一些地址的功能是对应一些芯片的。 第二章寄存器 引入:CPU中含有运算器,寄存器,控制器(由内部总线连接)。而寄存器是可以用来指令读写的部件。8086有14个寄存器(都是16位,2个存储空间)。 一.通用寄存器(ax,bx,cx,dx),16位,可以分为高低位 注意1.范围:16位的2^16-1,8位的2^8-1 2.进行数据传送或运算时要注意位数对应,否则会报错 二.字:1. 1个字==2个字节。 2. 在寄存器中的存储:0x高位字节低位字节;单元认定的是低单元 数制,16进制h,2进制b
红米进工程模式
最后无意间在MIUI论坛看到了一串神奇的数字*#*#13411#*#* ,哈哈,进入工程模式了,调节成功,重启仍然有效, 内牛满面啊,红米终于接近完美了.......... 虽然类似的帖子不少,我还是贴出来给红米粉共享吧,因为到目前为止,仍然大把的人问这个问题,而且我没有找到完整解说这个问题的帖子。 首先在拨号界面输入神奇数字*#*#13411#*#* 然后进入到工程模式了,EngineerMode 然后向左滑动界面到Hardware Testing界面 然后选择Audio 可以看到Headset Mode就是耳机模式,点击进入,在Type里选择Media 可以看到在level 0里的数值非常大,具体值忘了,可能是112,我估计红米的测试工程师是在嘈杂的厂房里调节声音参数的, 要不然搞这么大干嘛,无聊啊 然后再level 0 --6 输入适当的参数,这个根据个人情况,我是每个level增长30,level 6可输入范围值的最大(160或255)或稍微少一些,以免破音。输入完数字值后,别忘按set呀!! 调节成功后,放了一段电影,哇!!效果超好啊,终于可以被窝里看在线视频了! 然后又进入收音机,K! 还这么大,赶紧输入神奇数字,
来到上面第4张图的位置,选择FMR,然后照方抓药,level0-6调节一遍,退出, 收音机终于好了。 怕没root,存不住,重启手机,调节依然有效啊,再 进入到“Audio”里面我们可以看到里面三个选项,分别是Normal Mode(正常模式),Headset Mode(耳机模式),Loudspeaker Mode(扬声器/外放声音模式),进入LoudSpeaker Mode(这个是外放的声音即铃声的选项)。 将Value Is 0-255位置,右边的数值填写大,即255,然后按一下“Set”确定(提示,如有破音请减少数值)。Max Vol. 0-160位置右边的数值填写最大,
8086汇编指令手册
8086汇编指令手册 一、数据传输指令 它们在存贮器和寄存器、寄存器和输入输出端口之间传送数据. 1. 通用数据传送指令. MOV 传送字或字节. MOVSX 先符号扩展,再传送. MOVZX 先零扩展,再传送. PUSH 把字压入堆栈. POP 把字弹出堆栈. PUSHA 把AX,CX,DX,BX,SP,BP,SI,DI依次压入堆栈. POPA 把DI,SI,BP,SP,BX,DX,CX,AX依次弹出堆栈. PUSHAD 把EAX,ECX,EDX,EBX,ESP,EBP,ESI,EDI依次压入堆栈. POPAD 把EDI,ESI,EBP,ESP,EBX,EDX,ECX,EAX依次弹出堆栈. BSWAP 交换32位寄存器里字节的顺序 XCHG 交换字或字节.( 至少有一个操作数为寄存器,段寄存器不可作为操作数) CMPXCHG 比较并交换操作数.( 第二个操作数必须为累加器AL/AX/EAX ) XADD 先交换再累加.( 结果在第一个操作数里) XLAT 字节查表转换. —— BX 指向一张256 字节的表的起点, AL 为表的索引值(0-255,即 0-FFH); 返回AL 为查表结果. ( [BX+AL]->AL ) 2. 输入输出端口传送指令. IN I/O端口输入. ( 语法: IN 累加器, {端口号│DX} ) OUT I/O端口输出. ( 语法: OUT {端口号│DX},累加器) 输入输出端口由立即方式指定时, 其范围是0-255; 由寄存器DX 指定时, 其范围是0-65535. 3. 目的地址传送指令. LEA 装入有效地址. 例: LEA DX,string ;把偏移地址存到DX. LDS 传送目标指针,把指针内容装入DS. 例: LDS SI,string ;把段地址:偏移地址存到DS:SI. LES 传送目标指针,把指针内容装入ES. 例: LES DI,string ;把段地址:偏移地址存到ES:DI. LFS 传送目标指针,把指针内容装入FS. 例: LFS DI,string ;把段地址:偏移地址存到FS:DI. LGS 传送目标指针,把指针内容装入GS. 例: LGS DI,string ;把段地址:偏移地址存到GS:DI. LSS 传送目标指针,把指针内容装入SS. 例: LSS DI,string ;把段地址:偏移地址存到SS:DI. 4. 标志传送指令. LAHF 标志寄存器传送,把标志装入AH. SAHF 标志寄存器传送,把AH内容装入标志寄存器.
DSP汇编指令总结
DSP汇编指令总结 一、寻址方式: 1、立即寻址: 短立即寻址(单指令字) 长立即数寻址(双指令字) 第一指令字 第二指令字 16位常数=16384=4000h 2、直接寻址 ARU 辅助寄存器更新代码,决定当前辅助寄存器是否和如何进行增或减。N规定是否改变ARP值,(N=0,不变)
4.3.1、算术逻辑指令(28条) 4.3.1.1、加法指令(4条); 4.3.1.2、减法指令(5条); 4.3.1.3、乘法指令(2条); 4.3.1.4、乘加与乘减指令(6条); 4.3.1.5、其它算数指令(3条); 4.3.1.6、移位和循环移位指令(4条); 4.3.1.7、逻辑运算指令(4条); 4.3.2、寄存器操作指令(35条) 4.3.2.1、累加器操作指令(6条) 4.3.2.2、临时寄存器指令(5条) 4.3.2.3、乘积寄存器指令(6条) 4.3.2.4、辅助寄存器指令(5条) 4.3.2.5、状态寄存器指令(9条) 4.3.2.6、堆栈操作指令(4条) 4.3.3、存储器与I/O操作指令(8条)4.3.3.1、数据移动指令(4条) 4.3.3.2、程序存储器读写指令(2条) 4.3.3.3、I/O操作指令(2条) 4.3.4、程序控制指令(15条) 4.3.4.1、程序分支或调用指令(7条) 4.3.4.2、中断指令(3条) 4.3.4.3、返回指令(2条) 4.3.4.4、其它控制指令(3条)
4.3.1、算术逻辑指令(28条) 4.3.1.1、加法指令(4条); ▲ADD ▲ADDC(带进位加法指令) ▲ADDS(抑制符号扩展加法指令) ▲ADDT(移位次数由TREG指定的加法指令) 4.3.1.2、减法指令(5条); ★SUB(带移位的减法指令) ★SUBB(带借位的减法指令) ★SUBC(条件减法指令) ★SUBS(减法指令) ★SUBT(带移位的减法指令,TREG决定移位次数)4.3.1.3、乘法指令(2条); ★MPY(带符号乘法指令) ★MPYU(无符号乘法指令) 4.3.1.4、乘加与乘减指令(6条); ★MAC(累加前次积并乘)(字数2,周期3) ★MAC(累加前次积并乘) ★MPYA(累加-乘指令) ★MPYS(减-乘指令) ★SQRA(累加平方值指令) ★SQRS(累减并平方指令) 4.3.1.5、其它算数指令(3条); ★ABS(累加器取绝对值指令) ★NEG(累加器取补码指令) ★NORM(累加器规格化指令) 返回 4.3.1.6、移位和循环移位指令(4条); ▲ SFL(累加器内容左移指令) ▲ SFR(累加器内容右移指令) ▲ROL(累加器内容循环左移指令) ▲ROR(累加器内容循环右移指令) 返回 4.3.1.7、逻辑运算指令(4条); ▲ AND(逻辑与指令) ▲ OR(逻辑或指令) ▲ XOR(逻辑异或指令) ▲ CMPL(累加器取反指令) 返回 4.3.2、寄存器操作指令(35条) 4.3.2.1、累加器操作指令(6条)
顺序功能图语言s7graph的使用
——顺序功能图语言S7 Graph的使用 S7 Graph语言是S7-300用于顺序控制程序设计的一种语言,遵从IEC 61131-3标准中的顺序控制语言的规定。下面给大家介绍一下该软件的使用。 1.S7 Graph的安装 S7 Graph软件属于可选的软件包,需要单独安装。安装步骤如下: (1)双击安装文件,安装开始。 (2)弹出“安装语言”对话框。选择“English”,如图所示。 图选择安装语言 后面弹出的对话框,点击“下一步”或“是”即可。 (3)安装过程,要求安装授权。如图所示。
图安装授权 (4)最后,弹出下面对话框,点击“Finish”,完成安装。 图完成安装 2.S7 Graph的结构: 用S7 Graph编写的顺序功能图程序以功能块(FB)的形式被主程序OB1调用。S7 Graph FB包含许多系统定义的参数,通过参数设置对整个系统进行控制,从而实现系统的初始化和工作方式的转换等功能。 对于一个顺序控制项目至少需要3个块: 1)一个调用S7 Graph FB的块,可以是组织块(OB)、功能(FC)和功能块(FB)。 2)一个S7 Graph FB块,用来描述顺序控制系统的任务及相互关系。 3)一个DB块,作为背景数据块,保存顺序控制的参数。
其中,一个S7 Graph FB最多包含250步和250个转换。 3.S7 Graph编辑器: 图中是S7 Graph的编辑器界面,左边的窗口是浏览窗口,右边的是程序编辑区。浏览窗口有三个选项:“Graphic”(图形)选项卡、“Sequencer”(顺序控制器)和“Variables”(变量选项卡)。“Graphic”(图形)选项卡的中间是顺序控制器,其上下是永久性指令;“Sequencer”(顺序控制器)可以方便的浏览总体结构;“Variables”(变量选项卡)中的变量是编程时可能用到的各种基本元素。 图S7 Graph编辑器 4.应用实例: 还是以锅炉的鼓风机和引风机的控制要求为例,其工作过程是:按下起动按钮后,引风机开始工作,5s后鼓风机开始工作,按下停止按钮后,鼓风机停止工作,5s后引风机再停止工作。根据要求,我们画出其顺序功能图,如图所示。
8086汇编语言指令的寻址方式有哪几类
1. 8086汇编语言指令的寻址方式有哪几类?用哪一种寻址方式的指令执行速度最快? 寄存器寻址最快 7. 下面这些指令哪些是正确的?哪些是错误的?如是错误的,请说明原因。 XCHG CS , AX ;不能修改CS MOV [BX] , [1000] ;不能在两个内存单元之间直接进行数据传送 XCHG BX , IP ;不能用名字直接访问IP PUSH CS POP CS ;不允许直接修改CS值 IN BX , DX ;输入数据必须使用累加器AL或AX MOV BYTE [BX] , 1000 ;格式错误,且超范围,应为MOV word PTR [BX],1000 MOV CS , [1000];不允许直接修改CS值 20.带参数的返回指令用在什么场合?设栈顶地址为3000H,当执行RET 0006后,SP的值为多少? 利用堆栈传递参数时使用;对于近调用SP=3008H,对于远调用SP=300AH 27.设当前SS=2010H,SP=FE00H,BX=3457H,计算当前栈顶地址为多少?当执行 PUSH BX指令后,栈顶地址和栈顶2个字节的内容分别是什么? 栈顶地址:SS:SP,物理地址为:2FF00H;PUSH 完以后栈顶地址为:SS:SP=2010:FDFEH,即物理地址为:2FEFEH,内容为:57H 34H(由低地址到高地址) B P7 5. 设(DS)=3000H,(BX)=1100H,(CS)=0062H,(S1)=0002H,(31100H)=52H, (31101H)=8FH,(31162H)=6BH,(31163H)=99H,(31103H)=F6H, (32200H)=AAH,(32201H)=B6H,(32800H)=55H,(32801H)=77H,给出下列各指令执行后AX寄存器的内容: (1) MOV AX,BX (2) MOV AX,[BX] (3) MOV AX,4200H (4) MOV AX,[2800H] (5) MOV AX,1100H[BX] (6) MOV AX,[1160H+SI] 9. 分别执行下列各指令组,写出AX的内容: (1) MOV AX,93A4H NEG AX 73A4-8c5c,e689-1977 (AX)=6C5CH (2) XY DW "AB" MOV AX,XY (AX)=4142H (3) MOV AX,2B7EH MOV CX,4DB5H ADD AX,CX (AX)=7933H (4) XA DW 0BD57H MOV AX,0FBCDH AND AX,XA (AX)=B945H (5) STC MOV BX, 0B69FH MOV AX, 43A2H SBB AX, BX
小米手机电池校正的方法
【小米手机电池校正的方法】 说下关于手机校正的方法,一般来说,电池校正还是用土办法比较好,别借助第三方软件,很多都是骗人的,压根没用。 非root手机: 1.保持手机开机状态,连接充电器充电(USB和线缆充电均可) 2.电池充满后,把手机从充电器拔下 3.关闭手机,再连接充电器充电,让手机再次充到LED灯变成绿色 4.拔下手机充电器 5.手机开机,等到手机开机并完全进入系统后,迅速关机 6.再次连接充电器到已经关闭的手机,等待几分钟后LED灯会再次变成绿色 7.把手机从充电器拔下,开机正常使用 已经取得root权限的手机: 1.保持手机开机状态,连接充电器充电 2.电池充满后,把手机从充电器拔下 3.关闭手机,再连接充电器充电,让手机再次充到LED灯变成绿色 4.拔下手机充电器 5.手机开机,等到手机开机并完全进入系统后,迅速关机 6.再次连接充电器到已经关闭的手机,等待几分钟后LED灯会再次变成绿色 7.启动手机进入recovery模式(同时按住手机返回键和电源键启动),然后选择wipebatterystats即可 或者用: 1.开机,连接上充电器,直到指示灯变绿 2.拔掉充电器,关机,接上充电器,直到指示灯变绿 3.拔掉充电器,开机,进入系统后,关机,接上充电器,直到指示灯变绿 4.拔掉充电器,开机到recovery里面的advanced菜单里面wipebatterystatus后重启即可 按照上面的步骤进行后电池校准就完成了,只比平时充电多用了5分钟的时间,但是校准后的电池和以前明显不同。 在电池校准前你会发现的电池在充满电的情况下稍微使用就会降到93%左右,而校准后可以保持数小时100%的状态才开始降低到99%,总之校准后的电池绝对会让你惊喜。 另外root过的的手机通过recovery程序wipebatterystats后效果更好,但也不是必须。 注意电池校准只需要进行一次即可,多次尝试也不会让你的电池活性再增强。 如果你的电池在进行上述操作后仍然没有提升,那就要怀疑你的电池是否原装还是仿造的了。
(完整word版)汇编语言常用指令大全,推荐文档
MOV指令为双操作数指令,两个操作数中必须有一个是寄存器. MOV DST , SRC // Byte / Word 执行操作: dst = src 1.目的数可以是通用寄存器, 存储单元和段寄存器(但不允许用CS段寄存器). 2.立即数不能直接送段寄存器 3.不允许在两个存储单元直接传送数据 4.不允许在两个段寄存器间直接传送信息 PUSH入栈指令及POP出栈指令: 堆栈操作是以“后进先出”的方式进行数据操作. PUSH SRC //Word 入栈的操作数除不允许用立即数外,可以为通用寄存器,段寄存器(全部)和存储器. 入栈时高位字节先入栈,低位字节后入栈. POP DST //Word 出栈操作数除不允许用立即数和CS段寄存器外, 可以为通用寄存器,段寄存器和存储器. 执行POP SS指令后,堆栈区在存储区的位置要改变. 执行POP SP 指令后,栈顶的位置要改变. XCHG(eXCHanG)交换指令: 将两操作数值交换. XCHG OPR1, OPR2 //Byte/Word 执行操作: Tmp=OPR1 OPR1=OPR2 OPR2=Tmp 1.必须有一个操作数是在寄存器中 2.不能与段寄存器交换数据 3.存储器与存储器之间不能交换数据. XLAT(TRANSLATE)换码指令: 把一种代码转换为另一种代码. XLAT (OPR 可选) //Byte 执行操作: AL=(BX+AL) 指令执行时只使用预先已存入BX中的表格首地址,执行后,AL中内容则是所要转换的代码. LEA(Load Effective Address) 有效地址传送寄存器指令 LEA REG , SRC //指令把源操作数SRC的有效地址送到指定的寄存器中. 执行操作: REG = EAsrc 注: SRC只能是各种寻址方式的存储器操作数,REG只能是16位寄存器 MOV BX , OFFSET OPER_ONE 等价于LEA BX , OPER_ONE MOV SP , [BX] //将BX间接寻址的相继的二个存储单元的内容送入SP中 LEA SP , [BX] //将BX的内容作为存储器有效地址送入SP中 LDS(Load DS with pointer)指针送寄存器和DS指令 LDS REG , SRC //常指定SI寄存器。 执行操作: REG=(SRC), DS=(SRC+2) //将SRC指出的前二个存储单元的内容送入指令中指定的寄存器中,后二个存储单元送入DS段寄存器中。
seo指令汇总
1. site指令: 查询某个特定网站收录情况比如查询https://www.360docs.net/doc/7716231908.html,格式即为:site:https://www.360docs.net/doc/7716231908.html, 2. 2: link指令: 查询某个网站的外部链接,外部链接是获取排名和权重的重要因素,尤其对于谷歌来说。除百度外其他主要搜索引擎的查询格式为:link:你的域名(在百度查询本站的格式为:domain:https://www.360docs.net/doc/7716231908.html,),yahoo站长工具查询外部链接是最精准的。 3. info指令: 查询指定网站的收录信息,最近的cache,相似网页,站点链接,网站内部链接,包含域名的网页等格式为:info:你的域名 4. cache指令: 获取上一次搜索引擎收录你的网站的情况,输入站点的某个页面,就能发现蜘蛛最近收录的日期和版本。比如想知道本站seo入门基础版块cache信息则应该:cache:https://www.360docs.net/doc/7716231908.html, 5. allinurl: or inurl:指令检索网页URL标题包含的特定内容。(inurl这个命令非常有用,在查询外链资源的时候特别推荐。比如,菜鸟SEO论坛想做外链,那么在百度搜索:seo inurl:bbs 回车键之后,可以找到与seo相关的论坛,然后就可以去做我们的外链,根据你网站的行业去进行操作。) 6. allintitle: or intitle: 指令获取所有网页标题中包含指定文字的网页。 7. allinanchor: or inanchor: 指令在链接中包含指定anchor的所有网页。 8 allintext: 指令显示在文档里涵括这些文字的所有网页。在seo中,用于发现相关站点和潜在的链接,经常用于查询竞争对手的情况。 9. define: 指令这个高级功能用得非常的少,不过在seo还是很有它的价值的,相当于一部辞典。 10. related: 指令查询与某网页特别相关的网页。格式为:related:你的域名在google**徐特定词组你会发现比百度更精确 1、site: 这个是SEO最熟悉的高级搜索指令了,用来搜索某个域名下搜索引擎收录的所有文件。目前百度、Google、雅虎等各大搜索引擎都支持该指令。站长都会使用该指令查询网站的收录页面数量,如:site:https://www.360docs.net/doc/7716231908.html,。也可以用于子 域名如:site:https://www.360docs.net/doc/7716231908.html,。Google还支持目录查询,如:site:https://www.360docs.net/doc/7716231908.html,/article,百度已经不支持目录查询。 2、link: 这也是SEOer常用的指令之一,用于查询某个url的反向链接,包括内部链接和外部链接。这个指令只适用于Google,查询的数据并不准确,只可作为参考。 3、linkdomain: 这个指令只适用于雅虎,用来查询某个域名的反向链接。雅虎的反向链接数据比较准确,所以SEOer一般都会用雅虎的linkdomain:命令查询一个网站的反向链接。 4、domain:
8086汇编指令大全.
标志寄存器:9个有效位,分 6个状态寄存器和 3个控制寄存器 CF 当执行一个加法(减法使最高位产生进位(借位时 CF=1 否则 CF=0 PF 指令执行的结果低 8位有偶数个一时, CF=1 否则 CF=0 AF 当执行一个加法(减法使运算结果低 4位向高 4位有进位(借位时 AF=1 否则 AF+0 ZF 当前运算结果为零, ZF=1 否则 ZF=0 SF 符号标志位 OF 溢出标志位 DF 方向标志位 IF 中断允许位 IF=1时响应外部中断
TF 跟踪标志位 操作数:[目的操作数(OPD ,源操作数(OPS ] ;立即操作数,寄存器操作数,存储器操作数。寻址方式: 1 寄存器寻址例:INC AX ; MOV AX , BX 2 寄存器间接寻址 (寄存器只能是 BX , DI , SI , BP ; [PA=(BX 、 DI 、 SI +DS》 4 或 BP+SS》4] 3 寄存器相对寻址 4 基址变址寻址 5 相对基址变址寻址 6 直接寻址 7 立即数寻址 i. 立即数寻址立即数寻址不能用在单操作数指令中 ii. 在双操作数中,立即数寻址方式不能用于目的操作数字段 指令系统: 1 数据传送指令 mov 注意: 不允许在两个存储单元之间直接传送数据
不允许在两个段寄存器之间传送数据 不允许用立即数直接为段寄存器赋值 不影响标志位 不允许寄存器或存储单元到除 CS 外的段寄存器 2 入栈(出栈指令 PUSH (POP 注意: PUSH 操作数不能是“立即数” POP 操作数不能是段寄存器 CS 不影响标志位 先进后出 单操作符 3 交换指令 XCHG 注意:
(完整word版)汇编语言指令集合-吐血整理,推荐文档
8086/8088指令系统记忆表 数据寄存器分为: AH&AL=AX(accumulator):累加寄存器,常用于运算;在乘除等指令中指定用来存放操作数,另外,所有的I/O指令都使用这一寄存器与外界设备传送数据. BH&BL=BX(base):基址寄存器,常用于地址索引; CH&CL=CX(count):计数寄存器,常用于计数;常用于保存计算值,如在移位指令,循环(loop)和串处理指令中用作隐含的计数器. DH&DL=DX(data):数据寄存器,常用于数据传递。他们的特点是,这4个16位的寄存器可以分为高8位: AH, BH, CH, DH.以及低八位:AL,BL,CL,DL。这2组8位寄存器可以分别寻址,并单独使用。 另一组是指针寄存器和变址寄存器,包括: SP(Stack Pointer):堆栈指针,与SS配合使用,可指向目前的堆栈位置; BP(Base Pointer):基址指针寄存器,可用作SS的一个相对基址位置; SI(Source Index):源变址寄存器可用来存放相对于DS段之源变址指针; DI(Destination Index):目的变址寄存器,可用来存放相对于ES 段之目的变址指针。 指令指针IP(Instruction Pointer) 标志寄存器FR(Flag Register) OF(overflow flag) DF(direction flag) CF(carrier flag) PF(parity flag) AF(auxiliary flag) ZF(zero flag) SF(sign flag) IF(interrupt flag) TF(trap flag) 段寄存器(Segment Register) 为了运用所有的内存空间,8086设定了四个段寄存器,专门用来保存段地址: CS(Code Segment):代码段寄存器; DS(Data Segment):数据段寄存器; SS(Stack Segment):堆栈段寄存器;
搜索命令大全
外链采集命令在整理中... 如果要使用好外链采集功能,必须先学以下 搜索引擎高级搜索指令 1、双引号 把搜索词放在双引号中,代表完全匹配搜索,也就是说搜索结果返回的页面包含双引号中出现的所有的词,连顺序也必须完全匹配。bd和Google 都支持这个指令。例如搜索:“seo方法图片” 2、减号 减号代表搜索不包含减号后面的词的页面。使用这个指令时减号前面必须是空格,减号后面没有空格,紧跟着需要排除的词。Google 和bd都支持这个指令。 例如:搜索 -引擎 返回的则是包含“搜索”这个词,却不包含“引擎”这个词的结果 3、星号 星号*是常用的通配符,也可以用在搜索中。百度不支持*号搜索指令。 比如在Google 中搜索:搜索*擎 其中的*号代表任何文字。返回的结果就不仅包含“搜索引擎”,还包含了“搜索收擎”,“搜索巨擎”等内容。
4、inurl inurl: 指令用于搜索查询词出现在url 中的页面。bd 和Google 都支持inurl 指令。inurl 指令支持中文和英文。 比如搜索:inurl:搜索引擎优化 返回的结果都是网址url 中包含“搜索引擎优化”的页面。由于关键词出现在url 中对排名有一定影响,使用inurl:搜索可以更准确地找到竞争对手。 5、inanchor inanchor:指令返回的结果是导入链接锚文字中包含搜索词的页面。百度不支持inanchor。 比如在Google 搜索:inanchor:点击这里 返回的结果页面本身并不一定包含“点击这里”这四个字,而是指向这些页面的链接锚文字中出现了“点击这里”这四个字。 可以用来找到某个关键词的竞争对收,而且这些竞争对手往往是做过SEO 的。研究竞争对手页面有哪些外部链接,就可以找到很多链接资源。 6、intitle intitle: 指令返回的是页面title 中包含关键词的页面。Google 和bd都支持intitle 指令。 使用intitle 指令找到的文件是更准确的竞争页面。如果关键词只出现在页面可见文字中,而没有出现在title 中,大部分情况是并没有针对关键词进行优化,所以也不是有力的竞争对手。 7、allintitle allintitle:搜索返回的是页面标题中包含多组关键词
西门子顺序功能图语言S7 Graph的应用
5.6 顺序功能图语言S7 Graph 的应用 5.6.1 S7 Graph 语言概述 S7 Graph 语言是S7-300/400的顺序功能图语言,遵从IEC 61131-3标准的规定。 1.顺序控制程序的结构 一个顺序控制项目至少需要一个调用S7 Graph FB 的块,一个S7 Graph FB 和它的背景数据块。 CALL FB1, DB1SQ_INIT := OB/FB/FC FB1 DB1 永久性指令 永久性指令 S7 Graph 功能块 FB1的背景数据块 图5-45 顺序控制系统中的块
图5-46 S7 Graph 编辑器 步与转换跳步 分支中止 选择序列的分支选择序列的合并并行序列的分支并行序列的合并选择对象 预选/直接插入监视时间T 插入监视时间U 插入永 久条件插入动作插入永久性 FB ,FC 调用 插入顺序 控制器 “Drag and Drop ” 模式时与鼠标一起 移动的图形 图5-49 顺序控制器工具条与移动的图形 3.S7 Graph 的显示模式 在View 菜单中选择显示顺序控制器(Sequencer )、单步和永久性指令。 (1)在顺序控制器显示方式,执行菜单命令“View>Display with ”,可以选择: Symbols :显示符号表中的符号地址; Comments :显示块和步的注释;
Conditions and Actions:显示转换条件和动作; Symbol List:在输入地址时显示下拉式符号地址表。 (2)单步显示模式 只显示一个步和转换的组合,还可以显示Supervision:监控被显示的步的条件;Interlock:对被显示的步互锁的条件;执行命令“View>Display with> comments”显示和编辑步的注释。 用“↑”键或“↓”键可以显示上一个或下一个步与转换的组合。 (3)在“permanent instructions”(永久性指令)显示方式,可以对顺序控制器之前或之后的永久性指令编程。每个扫描循环执行一次永久性指令,可以调用块。 Y0 Y1 2号运输带 1号运输带 I1.0I1.1 Q1.0 Q1.1 1号运输带 2号运输带 图5-50 运输带控制系统示意图与顺序功能图1.创建使用S7 Graph语言的功能块FB 执行菜单命令“Insert → Direct”将进入“Direct”编辑模式。 执行菜单命令“Insert → Drag-and-Drop”,进入“Drag and Drop (拖放)”编辑模式。 执行菜单命令“View→Display with→Conditions and Actions”,显示或关闭各步的动作和转换条件。