OpenGL模拟摄影测量方法研究
第11卷 第4期2006年4月
中国图象图形学报Journa l o f I m age and G raphics
V o.l 11,N o .4
A pr .,2006
收稿日期:2004 08 05;改回日期:2005 07 04
第一作者简介:苏国中(1964~ ),男。高级工程师。2005年于武汉大学遥感信息工程学院获摄影测量与遥感工学博士学位。现从事遥感、摄影测量与计算机视觉、地理信息系统等方面的研究。E m ai:l s gz_gh@https://www.360docs.net/doc/7717291412.html,
Open GL 模拟摄影测量方法研究
苏国中 郑顺义 张剑清 张祖勋
(武汉大学遥感信息工程学院,武汉 430079)
摘 要 通过分析Open GL 透视成像过程,建立了O pen G L 成像矩阵与摄影测量中内外方位元素的关系。实现了静态单幅影像、立体像对的模拟以及运动目标轨迹和姿态模拟。利用摄影测量空间后方交会方法对模拟影像进行处理,验证了模拟结果的正确性。
关键词 O penGL 成像矩阵 摄影测量内外方位元素 相机姿态模拟 空间后交
中图法分类号:P 208 P273 文献标识码:A 文章编号:1006 8961(2006)04 0540 05
H o w to R elate the Open GL I magi ng Process w ith Exteri or
and Interi or Para m eters of Photogra mm etry
SU Guo zhong ,ZHENG Shun y i,ZHANG Jian q i n g ,ZHANG Zu xun
(S c hool of Re m ot e S e n si ng and Informa ti on Engineeri ng,W uhan Un i v e rsit y,W uhan 430079)
Abstrac t B ased on deep analysis of the i m ag i ng m echanis m o f O penGL in t he si ght of pro jecti ve geo m etry ,this paper
have constructed the re lati onshi p be t w een photogra mm etry exte ri o r and i nter i o r param eters and O penGL pro j ective m atri x and proved t he ir i nterna l consistency .T hen the trans iti on equa tions of t wo i m ag i ng pro cesses are der i ved .W it h abov e re lati onship and derivati on ,experi m ents have been conducted to s i m u l a te si ng le static i m age ,stereo i m age pa ir and mo ti on o rb i t and pose i n O pen G L .Experi m ental resu lts prove t he correctness o f the theo ry proposed in this paper .K eywords O penGL,i m ag i ng m atri x,exter i o r and i nter i or para m eters o f pho tog ra mm etry ,si m u l a te cam era s pose ,space resecti on
1 引 言
摄影测量主要研究自然景物影像的获取、几何处理、被摄物体大小形状测量及测量精度评定
[1]
。
OpenGL 主要提供3维模型构造、3维场景渲染、物体表面纹理贴面、特效和相关2维及3维图形操作功能
[2]
。OpenGL 可以将一个3维模型置于一个场
景中,加上光照和纹理用透视投影方法生成一幅逼真的2维影像
[3]
。以影像为主要研究对象的当代数
字摄影测量与计算机图形学有着天然的联系,摄影测量是不规则物体的高精度3维建模的一个重要技术途径之一;如果OpenGL 能模拟出已知摄影参数的影像,这可为探索新的摄影测量数据处理方法、摄影测量精度评定、摄影测量教学、空间摄影模拟创造
有利条件。众所周知OpenGL 这一功能强大的计算
机图形学程序库,其成像过程中涉及到的参数和矩阵与摄影测量学中的内外方位元素没有直接的联系
[4]
,这就为OpenGL 在摄影测量中的应用带来很
大不便。为此通过对OpenGL 的透视投影成像过程和机理的深入剖析,总结了二者之间的本质关系,推
导出两种成像过程的转换公式,并就摄影测量中典型的空间单片后方交会、立体像对生成、运动目标轨迹及姿态模拟等问题进行了分析和试验。
摄影测量与计算机视觉以及计算机图形学等学科的研究内容在某些方面有很大的相似,但由于发展背景不同,研究方法上存在很大差异,以致于很难交流和沟通,本文深入探索了摄影测量与计算机视觉以及计算机图形学
[5]
之间的区别及其内在联系,
对于学科之间的交流和沟通具有积极的启发作用。
第4期苏国中等:Open GL 模拟摄影测量方法研究541
2 OpenGL 成像过程与摄影测量方位
元素分析
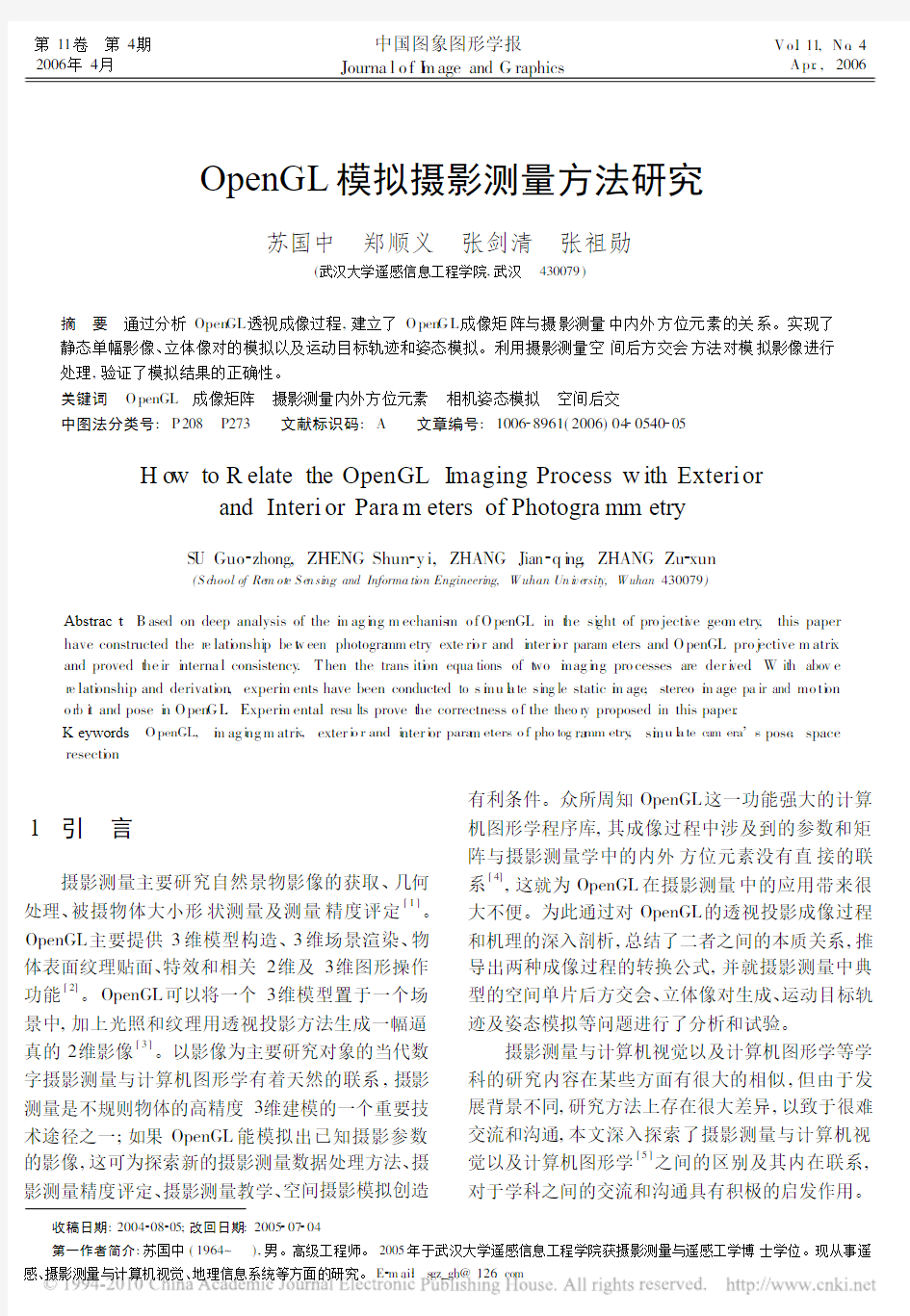
OpenGL 透视成像的几何过程如图1所示
[2]
。
一个3维物体模型上的点经过模型矩阵M 的旋转平移及缩放变换,进入像方空间坐标系中,再经过投影矩阵P 的透视投影变换,透视出仿射变换F 后获得屏幕影像坐标。其成像公式为
[x y 1]T
=F P M [X Y Z 1]T
(1)如图2所示,在OpenGL 中可以用函数
gl F rustum (x l ,x r ,y b ,y t ,z m ap ,z ob j )[6,7]
确定透视投影视
锥体,其中,(x l ,y b ),(x r ,y t )分别为成像平面左下和右上角坐标,z map 和z ob j 是视点到像平面和物平面的距离。由该函数生成的相应投影矩阵为
P =
2z map x r
-x l
0x r +x l x r -x l 00
2z map y t -y b
y t +y b y t -y b 000-z obj +z map z obj -z map -2z ob j z map z ob j -z map
-1
(2)
图1 O pen GL 成像过程F ig .1 Open GL i m ag i ng process
图2 O pe l G L 成像原理图F i g .2 O pen G L i m ag i ng theo ry
假设摄影底片宽高为(l x ,l y ),摄像机的焦距为f,像主点坐标为(x 0,y 0),按如图2所示,透视投影
)
进一步设物体从原物方坐标空间系变换到像方空间坐标系的模型变换矩阵M 为
M =
a 1
b 1
c 1-a 1X S -b 1Y S -c 1Z S a 2b 2c 2-a 2X S -b 2Y S -c 2Z S a 3b 3c 3-a 3X S -b 3Y S -c 3Z S
1
(4)
其中,{a i ,b i }为物体旋转矩阵元素,(X S ,Y S ,Z S )为
物体中心相对于原始位置移动的距离。在不失一般
性的情况下,像主点在屏幕中心的仿射变换矩阵F 可设置为
F =
l x
20000l y 2000
01
(5)
将式(2)~(5)代入式(1)得:
x -x 0=-f
a 1(X -X S )+
b 1(Y -Y S )+
c 1(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )y -y 0=-f
a 2(X -X S )+
b 2(Y -Y S )+
c 2(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S )
(6)
式(6)与摄影测量共线方程[1]
完全一致,说明
542 中国图象图形学报第11卷
只要按式(2)、(3)、(5)将摄影测量的成像参数设置到OpenGL 中的投影矩阵、视口矩阵和模型矩阵中,OpenGL 与摄影测量的成像过程就完全一致。否则即使获得视口矩阵、投影矩阵、模型矩阵和相应的影像,也不能确定OpenGL 中虚拟相机的内外方位元素。
3 OpenGL 模拟摄影测量方法
3.1 摄影测量空间后方交会模拟
在计算机中构造一个3维实体,对OpenGL 虚拟相机设置相应的内外方位元素和相应的视口矩阵,只要物体在虚拟相机的视场范围内,就可以获得一幅屏幕影像。
由于相应的模型坐标是已知的,在该影像上量测n(n >3)个影像坐标,就可以用空间后方交会的方法求出相机的内外方位元素。如果计算数据与预先设置的数据一致,可以验证以下两条推论。
(1)如果空间后方交会程序用其他方法证明是正确的,那么就可以证明在OpenGL 中设置摄影测量内外方位元素的方法也是正确的;
(2)如果在OpenGL 中设置摄影测量方位元素的方法是正确的,那么就可以证明编写的空间后方交会程序是正确的。依据前面的分析在O penGL 中设置一个虚拟相机和相应的方位元素是可能的。
设虚拟相机的角元素为( , , ),摄影中心位置为(X C ,Y C ,Z C ),焦距为f,其像幅大小为(l x ,l y ),则可以按下列步骤设置虚拟相机的摄影测量方位元素:
(1)用gM l atri x M ode(GL _PROJECTIO N )函数设置OpenGL 当前矩阵为投影矩阵;
(2)用gl L oadIdentity ()函数设置当前投影矩阵为单位阵;
(3)依据屏幕大小按式(2)、(3)计算透视投影矩阵P ;
(4)用gM l ulM t atrixd (*P )函数将矩阵P 加入OpenGL 当前投影矩阵中;
(5)调用函数g l R otated ( ,0,1,0)、gl R otated ( ,1,0,0)、gl R otated( ,0,0,1),设置摄影测量角元素;
(6)调用函数gl T ranslated (-X S ,-Y S ,-Z S ),设置摄影测量线元素;
(7)调用g M l atri x M o d e(GL _MODELVI EW ),按需
求设置模型变换坐标M ,其中,GL _MODELVIE W 为OpenGL 规定的设置模型矩阵常数。
(8)依据屏幕大小调用函数glVie wp ort (0,0,
scr X ,scrY)设置视口矩阵F,其中scr X ,scrY 为屏幕宽高。
现以一个10!10的立方块为研究对象,移动水平放置的立方块中心点到OpenGL 全局坐标系的(0,0,-15)。设OpenGL 虚拟相机的摄站点坐标为(20,0,0),焦距f =5 0,像主点坐标为(0 00,0 00),相机姿态: =0 0?、 =0 0?、 =-10?。这时可以获得一幅如图3所示的模拟影像。量测影像上8个角点的坐标,用空间后方交会解算虚拟相机参数,从计算结果表1中可以看出计算值与原虚拟相机的设置值是一致的。实际测试过程中,使用的摄影测量空间后方交会程序是经过其他数据检验的一个比较可靠的程序。试验结果说明,用OpenGL 完全可以模拟出航空摄影影像的各种几何参数的。
图3 O pen G L 产生的模拟图像
F i g.3 T he si m ulated i m age produced by Open GL
3.2 摄影测量中立体像对的模拟
OpenGL 本身支持带双缓冲区的显示卡,只要将具有左右视差的影像置入两个缓冲区中就可以使用偏振眼镜观察立体。现在要使用OpenGL 模拟出
模型物体的一个立体像对,利用这个像对可以进行相对定向、绝对定向、核线排队、相关匹配等程序调试工作。只要依据设定的相片重叠度,定义虚拟相机摄站点位置和参数就可以获得立体像对,图4是OpenGL 模拟的一个飞机模型的立体像对。3.3 摄影测量中运动轨迹及物体姿态模拟用OpenGL 模拟运动轨迹比较简单,依据物体在某一时刻t 的位置坐标(x t ,y t ,z t ),直接调用OpenGL 库函数gl T ranslated (x t ,y t ,z t )即可设置其模型矩阵,从而实现物体的运动轨迹模拟。然而,为了保证被模拟目标(例如飞机)自身方向(机头所指方
第4期苏国中等:Open GL 模拟摄影测量方法研究
543
表1 摄影测量空间后方交会结果T ab .1 T he resu lt of space re section
序号
物体原始坐标
影像量测坐标方位元素
计算值原设置值X
Y Z x y f 5.00403885.001-5.00-5.00-20.0230280x 00.000000000.0025.00-5.00-20.0291269y 00.000000000.0035.005.00-20.0280208 0.00000361?0.00?4-5.005.00-20.0219219 -0.00000179?0.00?5-5.00-5.00-10.081338 -9.93698756?-10.0?65.00-5.00-10.0204316X S 20.0090915020.0075.005.00-10.0182193Y S -0.000127840.008
-5.00
5.00
-10.0
59
215
Z S
0.00076032
0.
00
图4 O pen GL 模拟立体像对
F i g.4 The si m ulated ste reo i m age pa ir produced by O pen
G L
向)与前进方向基本一致,需要解决矢量转角分解这样一个问题。在摄影测量中使用的都是独立转角系
统,即绕三坐标轴转角 , , 是相互无关的量;物体每向前移动一个位置相对于前进方向的矢量V 旋转一个角度!。如何将转角!分解为 , , 再设置到OpenGL 的模型矩阵中达到模拟运动物体姿态的目,
这是运动物体轨迹和姿态模拟的关键问题之一。
图5 在坐标系中矢量旋转示意图
F ig .
5 The sketch m ap o f vector rotation i n coordi nate syste m
如图5,设矢量V 1(x 1,y 1,z 1)与XZ 平面的夹角为!1,与X Y 平面的夹角为?1;矢量V 2(x 2,y 2,z 2)是
矢量V 1旋转的结果,它与XZ 、X Y 二平面的夹角分别为!2、?2;再设矢量V 0(0,s ,0)是矢量V 1旋转到与Y 轴重合的结果。于是有:
V 1=V 0 R (!1-90?) R (-?1)(7)
V 2=V 0 R (!2-90?) R (-?2)
(8)
其中,R 、R 、R 为相应坐标轴旋转矩阵。由
式(7)、(8)可得:
V 2=V 1(R (!1-90?)
R (-?1)
)
-1
R (!2-90?)
R (-
?2)
=V 1(R (-?1)
)T
(R (!1-90?))T
R (!2-90?)
R (-?2)=V 1
cos (?1)
0-s i n (?1)
010s i n (?1)0
cos (?1)
si n (!1)cos (!1)0-cos (!1)
si n (!1)0001
s i n (!2)-cos (!2)0cos (!2)si n (!2)00
1
cos (?2)0si n (?2)010-s i n (?2)
cos (?2)
(9)
如果设定
2
1+y 2
1+z 2
1=x 2
2+y 2
2+z 2
2x 21+y 21x 2
2
+y
22
d 1!d 2
(10)
544
中国图象图形学报第11卷及
si n(!1)=y1
s
cos(!1)=
d1
s
si n(!2)=y2
s
cos(!2)=
d2
s
si n(?1)=z1
d1
cos(?1)=
z2
d2
si n(?2)=x
1
s
cos(?2)=
x
2
s
(11)考虑到计算角度前将矢量单位化,则可以推导出:
=arctan2(z1x2s-x1y1y2z2-x1z2d,
y1z1y2z2+z1z2d+x1x2r)
=arcsi n(-d1y2z2/s/d2+y1z2/s)
=arctan2(x2y2d1-x2y1d2,dd2+y1
y2d2)
(12)
为此,只要为模拟的运动物体设计一条平稳的飞行路线,按式(12)计算每一位置点的姿态角,再加上一些随机噪声,在OpenGL程序中设置时间事件的响应就可以完成运动物体轨迹和姿态的模拟,图6是一个已知真实轨迹的姿态模拟序列每隔10幅取一幅的结果。
图6 模拟飞行序列
F i g.6 The si m ulated i m age sequence
4 结 论
通过本文分析可知,OpenGL的成像过程完全可以用摄影测量的方法进行定量控制;用OpenGL 可以模拟各种摄影测量过程,把OpenGL强大的虚拟现实能力和摄影测量精确的空间定位和测量能力结合起来,可以在单片摄影测量、相机参数设置、摄影测量软件算法研究及质量评估、移动目标识别和姿态测量等方面发挥作用。
参考文献(R eferences)
1 Zhang Zu xun,Zhang Ji an q i ng.D i g it al photogra mm etry[M].
W uh an:Publi sh i ng house ofW uhan Un ivers i ty,1996.[张祖勋,张剑清著.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.]
2 R ic h ard S W righ t,Jr M i chael Sw eet.OpenGL B i b le[M].Postal
Pub lis h i ng H ou s e of Peop le,2001.[R i ch ard S W ri gh t,Jr M ichael
Sw eet著.OpenGL超级宝典[M].北京:人民邮电出版社, 2001.]
3 Sun J i a gu ang,Yang Chang gu.i Co m pu t er Graph ics[M].Beiji ng:
Ts i nghua Un i versity Pub lis h i ng H ouse,1997.[孙家广,杨长贵著.
计算机图形学[M].北京:清华大学出版社,1997.]
4 W ang Zh i z huo.Pri nciple of Ph otogramm etry[M].Beiji ng:
Pub li shingH ouse of Survey i ng and M apping,1980.[王之卓著.摄影测量原理[M].北京:测绘出版社,1980.]
5 Rogers D F.A l gori thm Foundati on of C o m puter Graph ics[M].
Tran slated by L iang You dong,Sh i J i ao yi ng,Peng Qun s h eng.
Be iji ng:T si nghu aU n i vers it y Pub lis h i ng H ouse,1986.[Rogers D F 著.计算机图形学的算法基础[M].梁友栋,石教英,彭群生译,北京:清华大学出版社,1986.]
6 Q i ao L i ng,Fei Gu ang zheng.OpenGL P rogra m Desi gn[M].
Be iji ng:T si nghua Un i vers i ty Pub li sh i ngH ouse,2000.[乔林,费广正著.OpenGL程序设计[M].北京:清华大学出版社,2000.]
7 L i Y i ng,Xue H a i b i n.OpenGL Functi on and S a mp le Analys i s
M anual[M].Beiji ng:Nati onal Defence Industry Pub lis h i ng H ouse, 2002.[李颖,薛海斌著.OpenGL函数与范例分析手册[M].北京:国防工业出版社,2002.]
CAD测量连续线段长度的简单办法(1)
测量CAD图中多条线段长度的简单办法 由于在Cad中没有连续测量线段长度的命令,多数人都是利用查询直线命令,将线段一段一段的测量再通过计算器相加,很是麻烦,现介绍两种更为简单实用的多线段测量方法。 1.利用PL命令测量多条线段长度: 使用多段线(pline)命令快捷健pl,连续在测量点上画线,再用(list)快捷健li命令点这条线确认就会出现该线的属性,可以看到该线段的总长度和该线段区域的面积。 2.利用PE命令测量线段多条线段的长度: 输入:PE回车确认,M回车确认,连续点选要测量的线段后回车确认,Y回车确认,J(闭合)回车二次确认,若线段出现闭合需要再输入O将闭合打开。此时所有欲测量的线段已经连接为一条多线段,再输入 li(list),就可以看到线段的总长度和该线段区域的面积了。 1
附录:需要熟记的CAD常用快捷键 一、常用功能键 F1: 获取帮助 F2: 实现作图窗和文本窗口的切换 F3: 控制是否实现对象自动捕捉 F4: 数字化仪控制 F5: 等轴测平面切换 F6: 控制状态行上坐标的显示方式 F7: 栅格显示模式控制 F8: 正交模式控制 F9: 栅格捕捉模式控制 F10: 极轴模式控制 F11: 对象追踪式控制 二、常用字母快捷键 A: 绘圆弧 B: 定义块 C: 画圆 D: 尺寸资源管理器 E: 删除 F: 倒圆角 G: 对相组合 H: 填充 I: 插入 S: 拉伸 T: 文本输入 W: 定义块并保存到硬盘中 L: 直线 M: 移动 X: 炸开 V: 设置当前坐标 U: 恢复上一次操做 O: 偏移 P: 移动 Z: 缩放 AA: 测量区域和周长(area) AL: 对齐(align) 2
长度测量的几种常见方法
长度测量的几种常见方法 在长度测量中,常遇到一些物体的长度不能直接用刻度尺测量,如球的直径、一张纸的厚度等。但是,根据具体情况采取不同的特殊方法是可以测出它们的长度的。下面是在测量中常用到的几种长度的特殊测量方法; 一、曲直法。利用其它工具把曲线变成直线,再用刻度尺测量。 例1 你能利用刻度尺测出排球的直径吗? 提示:用一条弹性很小的柔软棉线沿排球的“赤道”绕一周,然后量出棉线的长度,再应用周长公式算出排球的直径。 二、轮替尺法。对于长而弯的曲线的测量,可借助圆轮沿曲线滚动,记下轮子滚过的转数,然后测出轮的周长,再用轮的周长乘以转数就得曲线的长度。 例2 怎样用你的玩具滚轮和一把米尺近似地测出你们学校跑道的总长? 三、斜正法。利用几何知道,用三角板和直尺测量如圆锥的高、圆柱体的直径和球的直径等。 例3 用直尺和三角板,你如何测出茶杯的深度和三棱锥的高度? 四、聚积法。把完全相同的物体重叠起来,先测出它们的总长,再算出所求部分的长。 例4 你能用一支铅笔,一把刻度尺近似地测出一根粗细均匀的铜丝的直径吗?写出你的操作过程。 提示:将金属丝在铅笔杆上密绕几十圈(不要叠合),测出其总长,然后除以圈数就可得到铜丝的直径。 五、割补法。对不规则图形面积的测量,将其轮廓描在方格纸上,先数占满方格的格数,再对没有占满方格的部分,按残缺的大小相互补充填满,得到占满的格数,然后测出每格的长和宽,算出每格的面积,乘以总格数就得到图形的近似面积。 例5 怎样利用直尺和印有方格的玻璃纸测出我国任何一省的面积。 六、影长法。利用太阳光或灯光和米尺,分别测出物体影长和米尺影长,根据几何知识算出物高=1米×物体影长/米尺影长。
X线摄影技术操作规范
X线摄影技术操作规范 X线机的使用原则: 1.了解机器的性能、规格、特点和各部件的使用注意事项,熟悉机器的使用限度。 2.严格遵守操作规则,正确熟练地操作,以保证机器使用安全。 3.在使用前,必须先调整电源电压,使电源电压表指针达到规定的指示范围。 4.在曝光过程中,不可以临时调节各种技术按钮,以免损坏机器。 5.在使用过程中,注意控制台各仪表指示数值,注意倾听电器部件工作时的声音,若有异常及时关机。 6.在使用过程中,严防机器强烈震动,移动部件时,注意空间是否有障碍物,移动式X线机移动前应将X线管及各种按钮固定。 7. X线机如停机时间较长,需将球管预热后方可使用。 X线机的一般操作步骤: 1.闭合外电源总开关。 2.接通机器电源,调节电源调节器,使电流电压指示针在标准位臵上。 3.检查球管、床中心,X线片暗合中心是否在一条直线上。 4.根据检查需要进行技术参数选择。 5.根据需要选择曝光条件,注意先调节mA值和曝光时间,在调节仟伏值。
6.以上各部件调节完毕,患者投照体位摆好,一切准备就绪,即可按下手闸进行曝光。 7.工作结束,切断机器电源和外电源,将机器恢复到原始状态。摄影原则: 1.有效焦点的选择:在不影响X线管超负荷的原则下,尽量采用小焦点摄影,以提高胶片的清晰度。 2.焦片距及肢片距的选择:摄影时应尽量缩小胶片距,如肢体与胶片不能贴近时,应适当增加增加焦片距。 3.中心线及斜射线的应用:在重点观察的肢体或组织器官平行于胶片时,中心线垂直于胶片,与胶片不平行而成角度时,中心线应与肢体与胶片夹角的分角线垂直,倾斜中心线与利用斜射线可取得相通效果。 4.呼气与吸气的应用: 5.虑线设备的应用:肢体厚度超过15cm,或管电压超过60仟伏时,一般需加虑线板、虑线器。 6.肢体摄影时,必须包括上下两个关节或邻近一端的关节。 7.在同一张胶片上同时摄取两个位臵时,肢体同一侧放在胶片同一侧。 X线摄影步骤: 1.阅读会诊单:仔细阅读会诊单内容,认真核对患者姓名、性别、年龄,了解患者病史,明确投照部位和检查目的。 2.确定摄影位臵:一般根据医嘱用常规位臵投照,如遇特殊病例,
最全测试方法
★测试方法 一、编写用例的方法 等价类划分、边界值、因果图、判定表、正交排列法、场景法、状态转换图法、测试大纲方法 ☆等价类划分 1.应用场合: 只要有数据输入的地方,就可以应用等价类划分。 从很多的数据中,选取具有代表性的数据进行测试,可以提高测试效率,节约测试成本。 2.核心概念: (1)有效等价类: 对程序有意义、合理的输入数据 程序接收有效等价类数据,应该正确计算、执行 (2)无效等价类: 对程序无意义、不合理的输入数据 程序接收无效等价类数据,应该给出错误提示,或者根本不让输入 3.步骤: (1)根据需求,划分等价类 (2)细化等价类 再次检查,等价类能不能细分,一般依据的不是书面上的需求,而是基于对计算机数据存储、 处理方式的深入理解。——对正数和负数一般需要单独测试 (3)建立等价类表(熟练后,直接做这一步) 个人认为这一步是多余的。 (4)编写测试用例 从每个等价类中至少选取一个数据进行测试即可 4.边界值法 说明:一般不会单独说到用边界值,等价类和边界值是小情侣,结合使用设计一套较为完善的测试用
例。 边界值选取规则:得到需求的边界值时,取大于,等于,小于三个值设计测试用例。 5.等价类法经验 1)在一条用例中,可以尽可能多的测试(覆盖)不同控件的1个有效等价类(包括有效边界值)—— 对于不同控件的有效等价类(有效边界值)可以组合着去测。 2)在一条用例中,只测试一个控件的一个无效等价类(包括无效边界值)——无效等价类先不要组 合(无效等价类先单独测试,避免屏蔽现象,最后可以考虑无效等价类的组合) ☆因果图法 1.应用场合 在一个界面中,有多个控件,要考虑控件之间的组合,不同控件的组合会产生不同的输出结果组合,为了弄清输入组合和输出组合之间的对应关系,可以使用因果图(控件之间的组合) 2.因果图的核心 (1)因——原因,输入动作 (2)果——结果,输出结果 找出原因(输入)和结果(输出),以及它们之间的对应关系 3.图形符号 (1)基本符号 表达输入(因)和输出(果)的对应关系 (2)约束条件 约束的是同一类型(全部是输入或者全部是输出) 4.步骤 1)找出所有的原因(输入)和找出所有的结果(输出) 2)找到各输入的限制关系和组合关系和找出各输出的限制关系和组合关系
MLSS和MLVSS的标准测定方法
MLSS和MLVSS的标准测定方法 仪器和实验用品 1.定量滤纸 2.马弗炉 3.烘箱 4.干燥器,备有以颜色指示的干燥剂 5.分析天平,感量0.1mg 实验步骤(括号内为实际操作) 1.定量滤纸在103-105℃烘干,干燥期内冷却,称重,反复直至获得恒重或称重损失小于前次称重的4%;重量为m0;(干燥8小时后放入干燥器冷却后称重为最终值或Φ12.5的滤纸直接以1g计)2.将样品100ml用1中的滤纸过滤,放入103-105℃的烘箱中烘干取出在干燥器中冷却至平衡温度称重,反复干燥制恒重或失重小于前次称重的5%或0.5mg(取较小值),重量为m1; SS=(m1- m0)/0.1(干燥8小时后放入干燥器冷却后称重为最终值)3.将干净的坩埚放入烘箱中干燥一小时,取出放在干燥其中冷却至平衡温度,称重,重量为m2; 4.将2中的滤纸和泥放在3中的坩埚中,然后放入冷的马弗炉中,加热到600℃灼烧60分钟,在干燥器中冷却并称重,m3;(从温度达到600℃开始计时) vss=[( m1+m2- m0)- m3]/0.1
MLSS:单位容积混合液内含活性污泥固体物质的总量(mg/L),MLVSS 指混合液挥发性悬浮固体。生活污水一般MLVSS/MLSS=0.7。测MLSS 需要定性滤纸(不能用定量的)、电子分析天平、烘箱、干燥器等。取100ml混合液用滤纸过滤,待烘箱中温度升到103-105之间的设定值后,将滤干后的滤纸放入烘箱烘2小时,取出置于干燥器中放置半小操作时。称量后减去滤纸重量,并且测滤纸的重量也要采用上述同样的步骤。该实验必须严格按照上述操作,否则会入偏差。 MLSS及MLVSS的常用测定方法 1. 定义: MLSS :称混合液悬浮固体。是指曝气池混合液体活性污泥的浓度,即在单位容积混合液内所占有的活性污泥固体物的总重量。MLVSS:称混合液挥发性悬浮固体。指MLSS(混合液悬浮固体)中的有机物量称为MLVSS。 2. 指标含义: MLSS、MLVSS是间接计量活性污泥微生物量的指标。 3. 水样的采集、保存及注意事项 采样地点定于曝气池出口处;曝气池水深3.1米,故应在液面下0.78
CAD测量连续线段的简单办法
测量CAD图中多条线段xx的简单办法 由于在Cadxx没有连续测量线段xx的命令,多数人都是利用查询直线命令,将线段一段一段的测量再通过计算器相加,很是麻烦,现介绍两种更为简单实用的多线段测量方法。 利用PL命令测量多条线段xx: 使用多段线(pline)命令快捷健pl,连续在测量点上画线,再用(list)快捷健li命令点这条线确认就会出现该线的属性,可以看到该线段的总长度和该线段区域的面积。 利用PE命令测量线段多条线段的xx: 输入:PE回车确认,M回车确认,连续点选要测量的线段后回车确认,Y 回车确认,J (闭合)回车二次确认,若线段出现闭合需要再输入0将闭合打开。此时所有欲测量的线段已经连接为一条多线段,再输入li(list),就可以看到 线段的总长度和该线段区域的面积了。 附录:需要熟记的CAD常用快捷键 常用功能键 F1:获取帮助 F2:实现作图窗和文本窗口的切换 F3:控制是否实现对象自动捕捉 F4:数字化仪控制 F5:等轴测平面切换 F6:控制状态行上坐标的显示方式 F7:栅格显示模式控制
F8:正交模式控制 F9:栅格捕捉模式控制 F10:极轴模式控制 F11:对象追踪式控制 常用字母快捷键 A:绘圆弧 B:定义块 C:画圆 D:尺寸资源管理器 E:删除 F:倒圆角 G:对相组合 H:填充 I:插入 S:拉伸 T:文本输入 W:定义块并保存到硬盘中L:直线 M:移动 X:炸开
V:设置当前坐标 U:恢复上一次操做 O:偏移 P:移动 Z:缩放 AA:测量区域和周长(area) AL:对齐(alig n) AR:阵列(array) AP:加载*lsp程系 AV:打开视图对话框(dsviewer) SE:打开对相自动捕捉对话框ST:打开字体设置对话框(style) SO:绘制二围面(2d solid) SP:拼音的校核(spell) SC:缩放比例(scale) SN:栅格捕捉模式设置(snap) DT:文本的设置(dtext) DI:测量两点间的距离 01:插入外部对相 常用CTRL快捷键
中华人民共和国国家标准《室内照明测量方法》要点
中华人民共和国国家标准《室内照明测量方法》 发布时间: GB5700-85 Measurementmethodsforinteriorlighting 1总则 1.1为统计照明的测量方法,确保测量的准确性,特制订本方法。 1.2测量目的 1.2.1检验照明设施与所规定标准的符合情况。 1.2.2调查照明设施与设计条件的符合情况。 1.2.3进行各种照明设施的照明比较的调查。 1.2.4测定照明随时间变化的情况,确定维护和改善照明的措施,以保障视觉工作要求和节约能源。 1.3测量内容 1.3.1室内有关面上各点的照度。 1.3.2室内各表面上的反射系数。 1.3.3室内各表面和设备的亮度。 1.4适用范围 1.4.1本标准适用于各种建筑室内照明的测量。 1.4.2本标准不适用道路和室外场地以及各种交通工具(火车、轮船、飞机等)的照明测量。 1.4.3采用本标准时,尚应符合有关规范和标准等条文的规定。 2测量仪器 2.1照度计 2.1.1用于照明测量的照度计宜为光电池式照度计。按接收器的材料,照度计可分为硒光电池式和硅光电池式的照度计。 2.1.2照明测量宜采用精确度为二级以上的照度计(指针式或数字式)。 2.1.3照度计的检定应按JJG245—81《光照度计》进行。 注:光照度计又称照度计。 2.2亮度计 2.2.1照明测量主要采用光电式亮度计,接收器可用光电池(硒、硅)、光电管、光电倍增管做成。 2.2.2亮度计的检定应按JJG211一80《亮度计》进行。 3照度测量 3.1一般照明时测点的平面布置 3.1.1预先在测定场所打好网格,作测点记号,—般室内或工作区为2~4m正方形网格。对于小面积的房间可取1m的正方形网格。 3.1.2对走廊、通道、楼梯等处在长度方向的中心线上按l~2m的间隔布置测点。 3.1.3网格边线一般距房间各边0.5~lm 3.2局部照明时测点布置 局部照明时,在需照明的地方测量。当测量场所狭窄时,选择其中有代表性的一点;当测量场所广阔时,可按3.1所述布点。 3.3测量平面和测点高度 3.3.1无特殊规定时,一般为距地0.8m的水平面。 3.3.2按需要规定的平面和高度。 3.3.3对走廊和楼梯,规定为地面或距地面为15cm以内的水平面。
X线摄影技术篇
X线摄影技术篇(1) 第Ⅰ章概述 1895年11月8日,德国物理学家威·康·伦琴(W·C·Rontgen)发现了X射线,当年12月22日伦琴利用X线拍摄了夫人手的照片,这是人类历史上第一张揭示人体内部结构的影像。 1896年X线就开始应用于医学,至今它经历X线的医学应用、X线诊断学的建立以及医学影像学的逐步形成三个阶段。 1.X线的产生 1.1 X线的产生 X线的产生是能量转换的结果。当X线管两极间加有高电压时,阴极灯丝发散出的电子就获得了能量,以高速运动冲向阳极。由于阳极的阻止,使电子骤然减速,约98%的动能产生热量,2%动能转换为X线。 1.2 X线产生的条件 X线产生必须具备以下三个条件: ·电子源:X线管灯丝通过电流加热后放散出电子,这些电子在灯丝周围形成空间电荷,即电子云。 ·高速电子的产生:灯丝发散出来的电子能以其高速冲击阳极,其间必须具备两个条件,一是在X线管的阴极和阳极之间施以高电压,两极间的电位差使电子向阳极加速;二是为防止电子与空间分子冲击而减弱,X线管必须是高真空。 ·电子的骤然减速:高速电子的骤然减速是阳极阻止的结果。电子撞击阳极的范围称靶面,靶面一般用高原子序数、高熔点的钨制成。阳极作用有两个,一是阻止高速电子产生X线;二是形成高压电路的回路。 2.X线产生的原理 X线的产生是高速电子和阳极靶物质的原子相互作用中能量转换的结果。X线的产生是利用了靶物质的三个特性:即核电场、轨道电子结合能和原子存在于最低能级的需要。 诊断使用的X线有两种不同的放射方式,即连续放射和特性放射。 2.1连续放射
连续放射又称韧致放射,是高速电子与靶物质原子核作用的结果。当高速电子接近原子核时,受核电场(正电荷)的吸引,偏离原有方向,失去能量而减速。此时电子所丢失的能量直接以光子的形式放射出来,这种放射叫连续放射。 连续放射产的X线是一束波长不等的混合线,其X线光子的能量取定于:电子接近核的情况;电子的能量和核电荷。 如果一个电子与原子核相撞,其全部动能丢失转换为X线光子,其最短波长(λmin)为 λmin=hc/kVp=1.24/kVp(nm)(1) 可见连续X线波长仅与管电压有关,管电压越高,产生的X线波长愈短。 2.2特征放射 特征放射又称标识放射,是高速电子击脱靶物质原子的内层轨道电子,而产生的一种放射方式。一个常态的原子经常处于最低能级状态,它永远保持其内层轨道电子是满员的。当靶物质原子的K层电子被高速电子击脱时,K层电子的空缺将由外层电子跃迁补充,外层电子能级高,内层电子能级低。高能级向低能级跃迁,多余的能量作为X线光子释放出来,产生K系特性放射。若是L层发生电子空缺,外层电子跃迁时释放的X线,称L系特性放射。 特征放射的X线光子能量与冲击靶物质的高速电子能量无关,只服从于靶物质的原子特性。同种靶物质的K系特性放射波长为一定数值。管电压在70kVp以上,钨靶才能产生特征X 线。特征X线是叠加在连续X线能谱内的。 3.X线的本质与特性 3.1 X线的本质 X线是一种能,有两种表现形式:一是微粒辐射,二是电磁辐射。X线属电磁辐射的一种,具有二象性、微粒性和波动性,这是X线的本质。 ·X线的微粒性:把X线看作是一个个的微粒—光子组成的,光子具有一定的能量和一定的动质量,但无静止质量。X线与物质作用时表现出微粒性,每个光子具有一定能量,能产生光电效应,能激发荧光物质发出荧光等现象。 ·X线的波动性:X线具有波动特有的现象—波的干涉和衍射等,它以波动方式传播,是一钟横波。X线在传播时表现了它的波动性,具有频率和波长,并有干涉、衍射、反射和折射现象。 3.2 X线特性 X线特性指的是X线本身的性能,它具有以下特性:
绝缘电阻的正确测量方法及标准
绝缘电阻的正确测量方法 一、测试内容施工现场主要测试电气设备、设施和动力、照明线路的绝缘电阻。 二、测试仪器 测试设备或线路的绝缘电阻必须使用兆欧表(摇表),不能用万用表来测试。兆欧表是一种具有高电压而且使用方便的测试大电阻的指示仪表。它的刻度尺的单位是兆欧,用ΜΩ表示。在实际工作中,需根据被测对象来选择不同电压等级和阻值测量范围的仪表。而兆欧表测量范围的选用原则是:测量范围不能过多超出被测绝缘电阻值,避免产生较大误差。施工现场上一般是测量500V以下的电气设备或线路的绝缘电阻。因此大多选用500V,阻值测量范围0----250ΜΩ的兆欧表。兆欧表有三个接线柱:即L(线路)、E(接地)、G(屏蔽),这三个接线柱按测量对象不同来选用。 三、测试方法 1、照明、动力线路绝缘电阻测试方法线路绝缘电阻在测试中可以得到相对相、相对地六组数据。首先切断电源,分次接好线路,按顺时针方向转动兆欧表的发电机摇把,使发电机转子发出的电压供测量使用。摇把的转速应由慢至快,待调速器发生滑动时,要保证转速均匀稳定,不要时快时慢,以免测量不准确。一般兆欧表转速达每分钟120转左右时,发电机就达到额定输出电压。当发电机转速稳定后,表盘上的指针也稳定下来,这时指针读数即为所测得的绝缘电阻值。测量电缆的绝缘电阻时,为了消除线芯绝缘层表面漏电所引起的测量误差,其接线方法除了使用“L”和“E”接线柱外,还需用屏蔽接线柱“G”。将“G”接线柱接至电缆绝
缘纸上。 2、电气设备、设施绝缘电阻测试方法首先断开电源,对三相异步电动机定子绕组测三相绕组对外壳(即相对地)及三相绕组之间的绝缘电阻。摇测三相异步电动机转子绕组测相对相。测相对地时“E”测试线接电动机外壳,“L”测试线接三相绕组。即三相绕组对外壳一次摇成;若不合格时则拆开单相分别摇测;测相对相时,应将相间联片取下。 四、绝缘电阻值测试标准 绝缘阻值判断 (1)、所测绝缘电阻应等于或大于一般容许的数值,各种电器的具体规定不一样,最低限值: 低压设备0.5MΩ, 3-10KV 300MΩ、 20-35KV为400MΩ、 63-220KV为800MΩ、 500KV为3000MΩ。 1、现场新装的低压线路和大修后的用电设备绝缘电阻应不小于0.5ΜΩ。 2、运行中的线路,要求可降至不小于每伏1000Ω=0.001MΩ,每千伏1 MΩ。 3、三相鼠笼异步电动机绝缘电阻不得小于0.5ΜΩ。 4、三相绕线式异步电动机的定子绝缘电阻值热态应大于0.5ΜΩ、冷态应大于2ΜΩ,转子绝缘电阻值热态应大于0.15ΜΩ、冷态应大于0.8ΜΩ。
测量要求方法
1.一般规定 1.1图根点是直接供测图使用的平面和高程控制点,可在各等级控制点上采用经纬仪交会法、测距导线法、全站仪坐标法、三角高程、水准测量、GPS等方法测量。 1.2图根点或测站点的精度以相对于邻近控制点的中误差来衡量,其点位中误差不应超过图上±0.1㎜;其高程中误差不应超过测图基本等高距的1/10。 1.3为了节约,图根点可以采用临时地面标志。 1.4图根点的密度因测图使用的仪器不同要求也不同,只要能够保证碎部点的平面高程精度即可。 1.5测站点可以在测图过程中根据需要随时测放。 2.图根点测量(略) 三、地形测量测绘内容及取舍 地形图应表示测量控制点、居民地和垣栅、工矿建筑物及其他设施、 交通及附属设施、管线及附属设施、水系及附属设施、境界、地貌和土质、植被等各项地物、地貌要素,以及地理名称注记等。并着重显示与测图用途有关的各项要素。 地物、地貌的各项要素的表示方法和取舍原则,除应按现行国家标准地形图图式执行外,还应符合如下有关规定。 1.测量控制点测绘 1.1测量控制点是测绘地形图和工程测量施工放样的主要依据,在图上应精确表示。 1.2各等级平面控制点、导线点、图根点、水准点,应以展点或测点位置为符号的几何中心位置,按图式规定符号表示。 2.居民地和垣栅的测绘 2.1居民地的各类建筑物、构筑物及主要附属设施应准确测绘实地外围轮廓和如实反映建筑结构特征。 2.2房屋的轮廓应以墙基外角为准,并按建筑材料和性质分类,注记层数。1:500与1:1000比例尺测图,房屋应逐个表示,临时性房屋可舍去;1:2000比例尺测图可适当综合取舍,图上宽度小于0.5mm的小巷可不表示。2.3建筑物和围墙轮廓凸凹在图上小于0.4mm,简单房屋小于0.6mm时,可用直线连接。 2.4 1:500比例尺测图,房屋内部天井宜区分表示;1:1000比例尺测图,图上6mm2以下的天井可不表示。 2.5测绘垣栅应类别清楚,取舍得当。城墙按城基轮廓依比例尺表示,城楼、城门、豁口均应实测;围墙、栅栏、栏杆等可根据其永久性、规整性、重要性等综合考虑取舍。 2.6台阶和室外楼梯长度大于3M毫米,宽度大于1M毫米的应在图中表示。 2.7永久性门墩、支柱大于1M毫米的依比例实测,小于1M毫米的测量其中心位置,用符号表示。重要的墩柱无法测量中心位置时,要量取并记录偏心距和偏离方向。 2.8建筑物上突出的悬空部分应测量最外范围的投影位置,主要的支柱也要实测。 3.工矿建(构)筑物及其它设施的测绘 3.1工矿建(构)筑物及其它设施的测绘,图上应准确表示其位置、形状和性质特征。 3.2工矿建(构)筑物及其它设施依比例尺表示的,应实测其外部轮廓,并配置符号或按图式规定用依比例尺符号;不依比例尺表示的,应准确测定其定位点或定位线,用不依比例尺符号表示。 4.交通及附属设施测绘 4.1交通及附属设施的测绘,图上应准确反映陆地道路的类别和等级,附属设施的结构和关系;正确处理道路的相交关系及与其它要素的关系;正确表示水运和海运的航行标志,河流和通航情况及各级道路的通过关系。 4.2铁路轨顶(曲线段取内轨顶)、公路路中、道路交叉处、桥面等应测注高程,隧道、涵洞应测注底面高程。 4.3公路与其它双线道路在图上均应按实宽依比例尺表示。公路应在图上每隔15~20mm注出公路技术等级代码,国道应注出国道路线编号。公路、街道按其铺面材料分为水泥、沥青、砾石、条石或石板、硬砖、碎石和土路等,应分别以砼、沥、砾、石、砖、碴、土等注记于图中路面上,铺面材料改变处应用点线分开。 4.4铁路与公路或其它道路平面相交时,铁路符号不中断,而将另一道路符号中断;城市道路为立体交叉或高架道路时,应测绘桥位、匝道与绿地等;多层交叉重叠,下层被上层遮住的部分不绘,桥墩或立柱视用图需要表示,垂直的挡土墙可绘实线而不绘挡土墙符号。 4.5路堤、路堑应按实地宽度绘出边界,并应在其坡顶、坡脚适当测注高程。 4.6道路通过居民地不宜中断,应按真实位置绘出。高速公路应绘出两侧围建的栅栏(或墙)和出入口,注明公路名称。中央分隔带视用图需要表示。市区街道应将车行道、过街天桥、过街地道的出入口、分隔带、环岛、街心花园、人行道与绿化带绘出。 4.7跨越河流或谷地的桥梁,应实测桥头、桥身和桥墩位置,加注建筑结构。码头应实测轮廓线,有专有名称的加注名称,无名称者注“码头”,码头上的建筑应实测并以相应符号表示。 4.8大车路、乡村路、内部道路按比例实测,宽度小于1M毫米时只测路中线,以小路符号表示。 5.管线测绘 5.1永久性的电力线、电信线均应准确表示,电杆、铁塔位置应实测。当多种线路在同一杆架上时,只表示主要的。城市建筑区内电力线、电信线可不连线,但应在杆架处绘出线路方向。各种线路应做到线类分明,走向连贯。
模拟法测静电场示范实验报告
实验七:模拟法测静电场 示范实验报告 【实验目的】 1. 理解模拟实验法的适用条件。 2. 对于给定的电极,能用模拟法求出其电场分布。 3. 加深对电场强度和电势概念的理解。 【实验仪器】 YJ-MJ-Ⅲ型激光描点模拟静电场描绘仪、白纸、夹子 【实验原理】 直接测量静电场,是非常困难的,因为: ① 静电场是没有电流的,测量静电场中各点的电势需要静电式仪表。而教学实验室只有磁电式仪表。任何磁电式电表都需要有电流通过才能偏转,所以想利用磁电式电压表直接测定静电场中各点的电势,是不可能的。 ② 任何磁电式电表的内阻都远小于空气或真空的电阻,若在静电场中引入电表,势必使电场发生严重畸变;同时,电表或其它探测器置于电场中,要引起静电感应,会使场源电荷的分布发生变化。 人们在实践中发现:两个物理量之间,只要具有相同的物理模型或相同的数学表达式,就可以用一个物理量去定量或定性地去模拟另一个物理量,这种测量方法称为模拟法。本实验用稳恒电流场模拟静电场进行测量。 从电磁学理论知道,稳恒电流场与静电场满足相同的场方程: 0E dl ?=? (静电场的环路定理) , 0E dS ?=?? (闭合面内无电荷时静电场的高斯定理); 0j dl ?=? (由?=?0l d E ,得?=?0l d E σ,又E j σ=,故?=?0l d j ) , 0j ds ?=?? (电流场的稳恒条件); 如果二者有相同的边界条件,则场分布必定相同,故可用稳恒电流场模拟静电场。 1.长直同轴圆柱面电极间的电场分布 在真空中有一个半径为r 0的长圆柱导体A 和一个内半径为R0的长圆筒导体B ,其中心轴重合且均匀带电,设A 、B 各带等量异种电荷,沿轴线每单位长度上内外柱面各带电荷σ+和
COD标准测定方法-国标GB11914-89化学需氧量的测定
COD 标准测定方法:国标 GB11914-89 化学需氧量的 测定
2011-7-20 8:45:00 来源:姜堰市银河仪器厂
1 应用范围 本标准规定了水中化学需氧量的测定方法。 本标准适用于各种类型的含 COD 值大于 30mg/L 的水样,对未经稀释的水样的测 定上限为 700 mg/L。超过水样稀释测定。 本标准不适用于含氯化物浓度大于 1000 mg/L(稀释后)的含盐水。 2 定义 在一定条件下,经重铬酸钾氧化处理时,水样中的溶解性物质和悬浮物所消耗的重 铬酸钾盐相对应的氧的质量浓度。 3 原理 在水样中加入已知量的重铬酸钾溶液,并在强酸介质下以银盐作催化剂,经沸腾回 流后,以试亚铁灵为指示剂,用硫酸亚铁铵滴定水样中未被还原的重铬酸钾有西欧爱 好的硫酸亚铁铵的量换算成消耗氧的质量浓度。 在酸性重铬酸钾条件下,芳烃及吡啶难以被氧化,其氧化率较低。在硫酸因催化作 用下,直链脂肪族化合物可有效地被氧化。 4 试剂 除非另有说明,实验时所用试剂均为符合国家标准的分析纯试剂,试验用水均为蒸 馏水或同等纯度的水。 4.1 硫酸银(Ag2SO4),化学纯。 4.2 硫酸汞(Hg SO4),化学纯。 4.3 硫酸(H2SO4),ρ=1.84g/Ml。 4.4 硫酸银-硫酸试剂:向 1L 硫酸(4.3)中加入 10g 硫酸银(4.1),放置 1~2 天使 之溶解,并混匀,使用前小心摇动。 4.5 重铬酸钾标准溶液: 4.5.1 浓度为 C(1/6K2Cr2O7)=0.250mol/L 的重铬酸钾标准溶液:将 12.258g 在 105℃ 干燥 2h 后的重铬酸钾溶于水中,稀释至 1000mL。 4.5.2 浓度为 C(1/6K2Cr2O7)=0.0250mol/L 的重铬酸钾标准溶液:将 4.5.1 条的溶液 稀释 10 倍而成。 4.6 硫酸亚铁铵标准滴定溶液 4.6.1 浓度为 C〔(NH4)2Fe(SO4)2· 6H2O〕≈0.10mol/L 的硫酸亚铁铵标准滴定溶液:
几种特殊的测量方法
科学兴趣小组讲章(2017.9.27): 几种特殊的测量方法 长度的特殊测量 长度测量是最基本的测量。一般情况下,可以用测量工具刻度尺直接测量。如果受到某些条件的限制,不能或不易用测量工具直接测量,那么只能用间接测量。间接测量长度的方法通常有以下几种: 一、累积法 又叫测多算少法,通过积少成多的办法进行测量,再通过求平均来求得,这种方法还可以减小误差。可用于测纸的厚度和细金属线的直径。如要测某一课本中每张纸的厚度,可取若干张纸(纸的张数要适量),压紧后,用最小刻度为毫米的刻度尺量出其总厚度,然后将总厚度除以纸的张数,所得的商即是每张纸的厚度。 又如,要测细金属丝的直径,我们只要找一支圆铅笔(或粗细适 当的圆柱体),将金属丝在铅笔上依次密绕适当的圈数,用有毫米刻 度的刻度尺量出这个线圈的长度,再将线圈长除以圈数,所得的商就 是金属丝的直径。 二、化曲为直法 也称棉线法。比较短的曲线,可以用一根弹性不大或没有弹性的柔软棉线替代曲线来测量。方法是把棉线的起点放在曲线的一端点处,让它顺着曲线弯曲,标出曲线另一端点在棉线处的记号作为终点,然后把棉线拉直,用刻度尺量出棉线起点至终点间的距 离,即为曲线长度。 曲线的长度是不易直接测出的,但可以将曲线化为直线,再用工具测出直 线长。例如,测地图上某两城市铁路线的长度,可用棉线使之与地图上的铁路 线重合,再把棉线弄直,用刻度尺测出其长度,即是地图上铁路线的长度。 测出如图所示曲线的长度。 取一段没有弹性的棉线,将它与所示图形完全重合,记下起点和终点位置,然后将棉线拉直后用刻度尺测出两点之间的距离,这一距离即为所示曲线的长度。显然,利用此方法还可测出地图上任意两地铁路线之间的图上距离,结合地图上的比例尺,利用公式“实际距离=图上距离/比例尺”便可算出两地之间的实际距离。 三、滚轮法 比较长的曲线,可用一轮子,先测出其直径,后求出其周长,再 将轮沿曲线滚动,记下滚动的圈数,最后将轮的周长与轮滚动的圈数 相乘,所得的积就是曲线的长度。 例如,要测运动场上跑道的长,可用已知周长的滚轮在长跑道上 滚动,由滚动的圈数×滚轮的周长,就可算出跑道的长度。 四、平移法 这种测量方法也叫“卡测法”。卡测法对于部分形状规则的物体, 某些长度端点位置模糊,或不易确定,如圆柱体、乒乓球的直径,圆 锥体的高等,需要借助于三角板或桌面将待测物体卡住,把不可直接 测量的长度转移到刻度尺上,从而直接测出该长度。例如,用直角三 角板和刻度尺测球体的直径、圆锥体的高、硬币的直径、圆柱体的直径等都用这种方法。
标准工时测定方法
标准工时测定方法 一、标准工时定义 标准工时指对于必要能力受过充分训练的作业人员,在适当的速度和作业环境下执行作业所需要的时间。 即是在下列条件下,完成一单位作业所需的时间: 1.采用标准作业及标准设备 2.在标准化的作业条件下 3.作业者均具备制程所要求的熟练度和适应度 4.在不妨害生理健康的情況下熟练度与适应度 5.以企业所设定的正常作业速度,完成一個单位作业量 二、标准工时的角色 三、标准工时的构成 四、宽放时间种类 a. 生理宽放:又称私事宽放。 标准工时 标准准备时间 标准主体时间 净准备时间 宽放时间 净作业时间 宽放时间 一般时间 特殊时间 特殊时间 一般时间 标准工时 工厂管理 外包价格的決定 标准价目格的決定 的決定 设备管理 设备机种的选定 设备台数的決定 设备定位的決定 生产管理 生产计划 日程计划 作业管理 适当的人员配置 作业制程改善 效率管理 工程管理 价格管理 效率与生产性能的评价 奖励津帖的策略 价格的预估
b.疲劳宽放:分为体力疲劳和精神疲劳。 c.管理宽放:又称连接宽放。 五、标准工时测定方法 a.秒表测时法 b.PTS测时法(多采用MTM法) c.MOD测时法 标准工时测定方法有很多种,各IE作业者由于喜好及运用熟练程度不同而选择不同的动作方法。以上三种方法各有优缺点,实际操作中往往结合运用。 a.秒表测时法 秒表测时法是最古老、最常用的测时方法,目前多数企业广泛采用。 1.局限性 1>必须在生产效率达到一定水平时采集到数据才有效。 2>评比比较困难,人为因素较多。 3>采集数据周期比较长,时间成本耗费较大。 2.优势性 1>采集数据简单,较为直接,操作比较简单。 2>IE人员能更多了解生产实际,采集数据更据有说服力。 3.具体操作方法 1>操作要素 测时人员必须了解被测对象(包括:a.工件的制作流程;b.作业的工作方法和 作业标准;c.进行作业的人和设备。)
C测量连续线段长度的简单办法
C测量连续线段长度的 简单办法 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
测量C A D图中多条线段长度的简单办法由于在Cad中没有连续测量线段长度的命令,多数人都是利用查询直线命令,将线段一段一段的测量再通过计算器相加,很是麻烦,现介绍两种更为简单实用的多线段测量方法。 1.利用PL命令测量多条线段长度: 使用多段线(pline)命令快捷健pl,连续在测量点上画线,再用(list)快捷健li命令点这条线确认就会出现该线的属性,可以看到该线段的总长度和该线段区域的面积。 2.利用PE命令测量线段多条线段的长度: 输入:PE回车确认,M回车确认,连续点选要测量的线段后回车确认,Y 回车确认,J(闭合)回车二次确认,若线段出现闭合需要再输入O将闭合打开。此时所有欲测量的线段已经连接为一条多线段,再输入 li(lis t),就可以看到线段的总长度和该线段区域的面积了。 附录:需要熟记的CAD常用快捷键 一、常用功能键 F1: 获取帮助 F2: 实现作图窗和文本窗口的切换 F3: 控制是否实现对象自动捕捉 F4: 数字化仪控制 F5: 等轴测平面切换 F6: 控制状态行上坐标的显示方式
F7: 栅格显示模式控制 F8: 正交模式控制 F9: 栅格捕捉模式控制 F10: 极轴模式控制 F11: 对象追踪式控制二、常用字母快捷键A: 绘圆弧 B: 定义块 C: 画圆 D: 尺寸资源管理器 E: 删除 F: 倒圆角 G: 对相组合 H: 填充 I: 插入 S: 拉伸 T: 文本输入 W: 定义块并保存到硬盘中L: 直线 M: 移动 X: 炸开 V: 设置当前坐标
电器安规标准及测量方法
电器安规标准及量测方法 1、相关法规、标准要求。 GB4706.1—1998 家用和类似用途电器的安全 GB/T3797—2005 电气控制设备 GB19212.1—2003 电力变压器﹑电源装置和类似产品的安全(第一部分:通用要求和试验) GB/T 2423.10-1995 电工电子产品环境试验-试验Fc和导则:振动(正弦) GB/T17626.2-1998 电磁兼容试验与测量技术静电放电抗扰度试验 GB/T17626.1-1998 电磁兼容抗扰度试验总论勺 GB/T17626.4-1998 电磁兼容电快速瞬变脉冲群抗扰度试验 GB/T17626.11-1998 电磁兼容电压暂降﹑短时中断和电压变化的抗扰度试验 2、电缆或软线横截面积与电流关系。 3、保护性接地端子或接地触点与被接地的金属部件之间的连接应是低电阻的。
用一个空载电压不超过12V的电源提供一个等于1.5倍额定输入电流或等于25A的电流(二者中取较大值),依此从接地端子或接地触点与每个易触及的金属部件之间通过,持续1min,测量期间的电阻值应不大于0.1Ω。试验按照接地电阻测试仪的操作规程进行,符合GB19212.1—2003第24.4条规定。 4、灰尘﹑固体异物和潮湿有害进入的防护 电控系统各独立部件的外壳具有和标在铭牌上的IP代码相一致的防飞尘﹑固体异物和潮湿进入的防护等级,要求的防护等级为IP20 (表示防护等级的代号由特征字母IP和后加两位数字组成。其中的两位数字分别表示符合表1和表2规定的条件),符合GB19212.1—2003第17.2条规定。 表1 第一位特征数字代表的防护等级 表2 第二位特征数字代表的防护等级
X线摄影技术操作规程
X线摄影技术操作规程之上肢X线摄影 1肘关节——前后正位 【操作方法及程序】 1.病人面向摄影台一端就坐,前臂伸直,掌心向上。 2.尺骨鹰嘴突置于暗盒中心并紧贴暗盒。肩部应略向被检侧外旋,且肩部下移, 尽量接近肘部高度。 3.摄影距离为90-100cm。 4.中心线经肘关节(肘横纹中点)垂直射人暗盒。 【注意事项】 1?照片影像应包括肱骨下段和尺骨、桡骨上段。 2.为防止病人移动,可考虑用沙袋固定手掌。 3.肘关节正、侧位在同一片中分格摄影时,远、近端方向保持一致,且关节间隙处于同一水平。 【评价标准】 1.关节间隙呈“一”字样阴影,肱挠关节面无骨性重选; 2.肱尺关节面有尺骨鹰咀重迭但关节间隙仍清晰; 3.挠骨粗隆少许与尺骨重选,尺挠关节间隙界限不清晰; 4.肱骨纵轴线与尺骨纵轴线在外方构成165° -170 ° (女多为165°,男多为170° )。 【质控要点】 1.前臂伸直掌心向上,上臂与前臂在同一平面放置; 2.中心线垂直肱骨内、外上髁。 肘关节 ---侧位 【操作方法及程序】 1.病人面向摄影台一端侧坐,曲肘成90°。 2.拇指在上,尺侧朝下,肘关节内侧紧贴暗盒呈侧位,肩部下移,尽量接近肘部高度。 3.摄影距离为90-100cm。 4.中心线经肘关节间隙,垂直射人暗盒。 【注意事项】 1.照片影像应包括肱骨下段和尺、桡骨上段。 2.为防止病人移动,可考虑用沙袋固定前臂。
3.肘关节正、侧位在同一片中分格摄影时,远、近端方向保持一致,且关节间隙处于同一水平。 【评价标准】 1.肱骨内外髁重迭构成圆形致密影; 2.鹰嘴呈切线投影,肘关节间隙呈半圆形透亮影; 3.桡骨头与尺骨喙突呈“△”形重迭显示。 【质控要点】 1.前臂与上臂成90°弯屈,且在同一平面放置; 2.掌呈半握拳,腕肘关节呈侧位; 3.中心线垂直肱骨外上髁。 肩关节 -- 前后正位 【操作方法及程序】 1.病人仰卧于摄影台上,肩胛骨喙突置于暗盒中心。对侧躯干略垫高,使被检侧肩部紧贴床面。被检侧上肢向下伸直,掌心朝上。 2.暗盒上缘超出肩部,外缘包括肩部软组织。 3.使用滤线器或滤线栅摄影。 4.摄影距离为100cm 5.中心线经喙突,垂直射入暗盒。 6.屏气曝光。 【注意事项】 对肩部骨折或脱位的病人,仰卧困难,可采用前后立位摄影。 【评价标准】 1.肱骨头与肩胛盂有1/3呈“纺锤状”重迭面; 2.肱骨头与肩峰分离约4mn不应重迭,肱骨大结节显示; 3.肩峰与锁骨远端相邻形成约2-5mm的肩锁关节面。 【质控要点】 1.肩部自然下垂,不应抬肩; 2.中心线应垂直通过喙突; 3.为使肩关节无肱骨头重选呈切线显示,应取15°斜位设置。
测试方案验收标准及方案
第八章测试方案 8.1 网络测试方案 一个高品质的网络要通过业务设计和定位、网络设计、设备选型、工程建设、方案验证和持续优化、维护管理6个环节来保证,其中设备选型、方案验证和优化主要通过选型测试和网络测试实现。为此中国电信于2004年初和2005年初分别组织了CN2项目的设备选型测试和网络验收测试。两次测试被业界认为是全球高端路由器和传统互联网向下一代多业务融合承载网转型的路演。 以网络需求为导向 以网络需求为导向,根据网络运营对设备的要求制订测试内容是测试中坚持的最基本方法。“萝卜青菜,各有所爱”,对选型测试来说,因为被选的设备最终是被某个特定网络所用的,所以必须根据网络的“口味”进行评价选择。将测试定位在网络而不是设备,也是运营商测试与设备厂商内部测试或第三方单位测试的本质区别,CN2的测试工作只有紧扣网络才是有意义的。 CN2网络是以盈利为目标的“精品网”,中国电信上下各级对她有很多的憧憬:能够承载商业大客户、语音、视频、数据等业务的统一多业务承载网络,具有高安全性和QoS保证。这样的网络要求设备具备六个方面的能力,包括:高可扩展性、高可用性、多业务融合承载能力、区分服务提供能力、可管理性和安全性。分析这些能力要求,就转换为一个完整的测试和评估指标体系,包括:设备可用性及其控制/转发平面的稳定性、交换容量和路由/标签/组播容量、流量转发能力、快速路由收敛和快速重路由(FRR)能力、服务质量保证(QoS)能力、MPLSVPN和组播业务能力、IPv6能力、网络管理和安全能力等。 根据网络需求制订测试内容之后,在具体的测试项目中,中国电信不断深入分析需求细节,定义测试指标和参数,设计测试方法。以IGP的快速路由收敛测试为例,因为CN2的需求是在ISIS域内,任何单电路或单路由器发生故障后,全网ISIS协议必须在一秒以内收敛。因此,根据CN2网络的工程技术施工规范,在设备上配置快速收敛机制和相关时间参数。分析CN2的网络结构,将一个充分
X线摄影技术操作规范
X线摄影技术操作规范 X线机的使用原则: 1、了解机器的性能、规格、特点与各部件的使用注意事项,熟悉机器的使用限度。 2、严格遵守操作规则,正确熟练地操作,以保证机器使用安全。 3、在使用前,必须先调整电源电压,使电源电压表指针达到规定的指示范围。 4、在曝光过程中,不可以临时调节各种技术按钮,以免损坏机器。 5、在使用过程中,注意控制台各仪表指示数值,注意倾听电器部件工作时的声音,若有异常及时关机。 6、在使用过程中,严防机器强烈震动,移动部件时,注意空间就是否有障碍物,移动式X线机移动前应将X线管及各种按钮固定。 7、X线机如停机时间较长,需将球管预热后方可使用。 X线机的一般操作步骤: 1、闭合外电源总开关。 2、接通机器电源,调节电源调节器,使电流电压指示针在标准位置上。 3、检查球管、床中心,X线片暗合中心就是否在一条直线上。 4、根据检查需要进行技术参数选择。 5、根据需要选择曝光条件,注意先调节mA值与曝光时间,在调节仟伏值。 6、以上各部件调节完毕,患者投照体位摆好,一切准备就绪,即可
按下手闸进行曝光。 7、工作结束,切断机器电源与外电源,将机器恢复到原始状态。摄影原则: 1、有效焦点的选择:在不影响X线管超负荷的原则下,尽量采用小焦点摄影,以提高胶片的清晰度。 2、焦片距及肢片距的选择:摄影时应尽量缩小胶片距,如肢体与胶片不能贴近时,应适当增加增加焦片距。 3、中心线及斜射线的应用:在重点观察的肢体或组织器官平行于胶片时,中心线垂直于胶片,与胶片不平行而成角度时,中心线应与肢体与胶片夹角的分角线垂直,倾斜中心线与利用斜射线可取得相通效果。 4、呼气与吸气的应用: 5、虑线设备的应用:肢体厚度超过15cm,或管电压超过60仟伏时,一般需加虑线板、虑线器。 6、肢体摄影时,必须包括上下两个关节或邻近一端的关节。 7、在同一张胶片上同时摄取两个位置时,肢体同一侧放在胶片同一侧。 X线摄影步骤: 1、阅读会诊单:仔细阅读会诊单内容,认真核对患者姓名、性别、年龄,了解患者病史,明确投照部位与检查目的。 2、确定摄影位置:一般根据医嘱用常规位置投照,如遇特殊病例,可根据患者情况加照其她位置,如切线、轴位等。