附合导线坐标计算表和空白表格

(完整word版)导线测量及计算
导线测量 一、导线测量概述 导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。 导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角, 再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建区、 地下工程、公路、铁路等控制点的测量。 导线的布设形式: 附合导线、闭合导线、支导线,导线网。 附合导线网自由导线网 钢尺量距各级导线的主要技术要求
注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求 二、导线测量的外业工作 1.踏勘选点及建立标志
2.导线边长测量 光电测距(测距仪、全站仪)、钢尺量距 当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。 (α+β+γ)-180o 改正内角,再计算FG边的边长:FG=bsinα/sinγ 3.导线转折角测量 一般采用经纬仪、全站仪用测回法测量,两个以上方向组 成的角也可用方向法。 导线转折角有左角和右角之分。当与高级控制点连测时, 需进行连接测量。 三、导线测量的内业计算 思路: ①由水平角观测值β,计算方位角α; ②由方位角α及边长D, 计算坐标增量ΔX 、 ΔY; ③由坐标增量ΔX 、ΔY,计算X、Y。
(计算前认真检查外业记录,满足规范限差要求后,才能进行内业计算)坐标正算(由α、D,求X、Y) 已知A(x A,y A),D AB,αAB,求B点坐标x B,y B。 坐标增量: 待求点的坐标: (一)闭合导线计算 图6-10是实测图根闭合导线示意图,图中各项 数据是从外业观测手簿中获得的。 已知数据: 12边的坐标方位角:12 =125°30′00″;1点的坐 标:x1=500.00,y1=500.00 现结合本例说明闭合导线计算步骤如下: 准备工作:填表,如表6-5 中填入已知数据和 观测数据. 1、角度闭合差的计算与调整: n边形闭合导线内角和理论值: (1) 角度闭合差的计算: 例:fβ=Σβ测-(n-2)×180o=359o59'10"-360o= -50"; 闭合导线坐标计算表(6-5)
三、附合导线坐标计算
三、附合导线坐标计算 附合导线的坐标计算与闭合导线的坐标计算基本相同,仅在角度闭合差的计算与坐标增量闭合差的计算方面稍有差别。 1.角度闭合差的计算与调整 (1)计算角度闭合差 如图6-13所示,根据起始边AB 的坐标方位角 AB α及观测的各右角,按式(4-19)推算CD 边的坐标方位角CD α'。 B AB B βαα-?+=1801 1112180βαα-?+=B 1429.02m 1283.17m 图6-13 附合导线略图
21223180βαα-?+= 32334180βαα-?+= C CD βαα-?+='+180)34 ∑-??+='m AB CD βαα1805 写成一般公式为: ∑-??+='R n βαα1800fin (6-18) 若观测左角,则按下式计算: ∑+??+='L n βαα1800fin (6-19) 附合导线的角度闭合差f β为: fin fin ααβ-'=f (6-20) (2)调整角度闭合差 当角度闭合差在容许范围内,如果观测的是左角,则将角度闭合差反号平均分配到各左角上;如果观测的是右角,则将角度闭合差同号平均分配到各右角上。 2.坐标增量闭合差的计算 附合导线的坐标增量代数和的理论值应等于终、始两点的已知坐标值之差,即 ?? ? -=?-=?∑∑0fin th 0fin th y y y x x x (6-21) 纵、横坐标增量闭合差为:
? ? ? --?=?-?=--?=?-?=∑∑∑∑∑∑)()(0fin th 0fin th y y y y y W x x x x x W y x (6-22) 图6-13所示附合导线坐标计算,见表6-7。 表6-7 附合导线坐标计算表
闭合导线平差计算步骤
闭合导线平差计算步骤: 1、绘制计算草图。在图上填写已知数据和观测数据。 2、角度闭合差的计算与调整 (1)计算闭合差: (2)计算限差:(图根级) (3)若在限差内,则按平均分配原则,计算改正数: (4)计算改正后新的角值: 3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差的计算与调整 (1)计算坐标增量闭合差。有: 导线全长闭合差: 导线全长相对闭合差: (2)分配坐标增量闭合差 若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。并计算改正后的坐标增量。
6、坐标计算 根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。 [ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。 计算表格见下图:
闭合水准路线内业计算的步骤: (1) 填写观测数据 (2) 计算高差闭合差 h f =∑h ,若h f ≤容h f 时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。 (3) 调整高差闭合差 各段高差改正数: i h i i h i L L f V n n f V ·· ∑-= ∑-= 或 各段改正高差: i i i V h h +=改 (4) 计算待定点的高程 闭合差(fh ) 水准路线中各点间高差的代数和应等于两已知水准点间的高差。若不等两者之差称为闭合差 高差闭合差的计算 .支水准路线闭合差的计算方法 .附合水准路线闭合差的计算方法 .闭合水准路线闭合差的计算方法 高差闭合差容许值 (n 为测站数,适合山地) (L 为测段长度,以公里为单位,适合平地) 水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差
附合导线平差教程
附合导线导线平差步骤 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αA1=αBA+180°+β A α12=αA1+180°+β 1 α2C=α12+180°+β 2 +)α CD ′=α 2C +180°+β C αCD′=αBA+43180°+∑β测左计算终边坐标方位角的一般公式为: α 终边′=α 始边 +n2180°+∑β测左(2-5) 式中n为导线观测角个数。 角度闭合差的计算公式为: f β测 =α终边′-α终边(2-6)
图2-21 附合导线计算示意图 角度闭合差f β的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即f β容)要求,例如图根导线角度闭合差的允许值为: f β容=±60″n (2-7) 式中n 为多边形内角的个数。这一步计算见辅助计算栏,f β测=+41″, f β 容 =±120″。 若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。 调整是应注意:当用左角计算α终边 ′时,改正数的符号与f β测符号相反;当用右 角计算α 终边 ′时,改正数的符号与f β测符号相同。可将闭合差按相反符号平均分 配给各观测角,而得出改正角: β=β测-f β测/n (2-8) 式中n 为多边形内角的个数。按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。 当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 α CD ′ =α 2C +180°+βC =139°50′18″+180°+49°02′38″=8°52′ 55″ (4)坐标增量的计算及闭合差调整 坐标增量计算,就是根据已经推算出的导线各边的坐标方位角和相应边的边长,按式(2-9)、(2-10)计算各边的坐标增量。 ΔX AB =D AB 2cos αAB (2-9)
附合导线计算方法
附合导线计算方法 已知A (X=,Y=),B (X=,Y=),C (X=,Y=),D (X=,Y=)四点坐标,及a AB (起始边), AB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。59”’ =-22。59”’+180=157000”52’(计算方位 角为负,所以要加上180) 同理求出0”’ 1:用求出 AB ±观测角(左正右负)±180, 依次加减,得出最后的‘CD 方位角,用计算 的方位角‘CD -CD =闭合差值 B1方位角=157000”52’-192 。14,24,,+180=144。46,28,, 12方位角=144。46,28 ,,-236。48,36,,+180=87。57,52,, 23方位角=87。57,52,,-170 。39,36,,,+180=97。38,16,, 34方位角=97。38,16,,-180。
00,48,,+180=97。17,28,, 4C方位角=97。17,28,,-230。32,36,,+180=46。44,52,, ‘ -CD=46。44,52,, CD -46045”23’=-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即: B1观测角=192。14,24,,-6”=192。14,18,, 12观测角=236。48,36,,-6”=236。48,30,, 23观测角=170。39,36,,-6”=170。39,30,, 34观测角=180。00,48,,-7”=180。00,41,, 4C观测角=230。32,36,,-6”=230。32,30,, 用调整后的观测角计算方位角:
附合导线平差教程
. 附合导线导线平差步骤 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: αα+β-180°= BAA1Aαα+β-180=° 12A11αα+180=°+β2 122C′αα+180+)=°+βC CD2C ′βαα°180×-=4+∑测左CDBA计算终边坐标方位角的一般公式为:nβαα 2-5)°′=+∑(-·180测左终边始边为导线观测角 个数。式中n 角度闭合差的计算公式为:αα 2-6 =f′(实测)-(理 论)()β测终边终边. . 2-21 附合导线计算示意图图 的大小,表明测角精度的高低。对于不同等级的导线,有不角度闭合差fβ f) 要求,例如图根导线角度闭合差的允许值为:同的限差(即β容n)(″2-7
测量闭合导线计算方法
测量闭合导线计算方法公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
如表7-3,已知A点坐标X=5609.26,Y=7130.38,方位角150度48分12秒.第一步:站点在B,后视A点,前视C点,得到B点的观测左角,及AB距离125.82m,转站C,后视B,前视D,得到C点观测左角, 及BC距离162.92m,转站D,后视C,前视A,得到D点观测左角, 及CD距离178.77m,转站A,后视D,前视B,得到A点观测左角, 及AB距离125.82m, 第二步:计算 A:角度闭合与调差 1:观测角总和:98。39,36,,+88。36,08,,+87。25,30,,+85。18,00,, =359。59,14,, 2: 闭合差值: 实测值-(N-2)×180=359。59,14,,-(4-2)×180=-46”(N为测站数) 3:闭合调整-(-46)÷4=+11.5(角度闭合差反符号平均分配到各观测角中,如有小数,按长边少分,短边多分原则) 4:改正后角度:B观测角=98。39,36,,+12”=98。39,36” C观测角=88。36,08,,+11”=88。36,19” D观测角=87。25,30,,+11”=87。25,41” A观测角=85。18,00,,+12”=85。18,12” 5:求方位角:A(待求点)=A(前一边方位角)+观测角(左角取得正,右角取负) ±180(实际计算时,如方位角+转角大于是180时应减去180,小于180,应加180,结果为负时应减360) B方位角=(150。48,12,,+98。39,48),,-180。=69。28,00” (方位角+转角大于180所以要减180) C方位角=69。28,00,,+88。36,19”+180。=338。04,19” (方位角+转角大于180所以要加180) D方位角=338。04,19”+87。25,30,,-180。 =245,30,00” (方位角+转角大于180所以要减180) A方位角=245。30,00”+85。18,00,,-180。=150。48,12,, (方位角+转角大于180所以要减180) B:坐标闭合差与调差 1:△X=边长×COS(方位角) △Y=边长×SIN(方位角) AB边长计算值: △X=125.82×COS(150。48,12,,)=-109.83 △Y=125.82×SIN(150。48,12,,)=61.38 BC边长计算值△X=162.92×COS(69。28,00”)=57.14 △Y=162.92×SIN(69。28,00”)=152.57 CD边长计算值: △X=136.85×COS(338。04,19”)=126.95 △Y=136.85×SIN(338。04,19”)=-51.11 DA边长计算值: △X=178.77×COS(245,30,00”)=-74.13 △Y=178.77×SIN(245,30,00”)=-162.67 各边长计算值之和△X=-109.83+57.14+126.95-74.13=+0.13
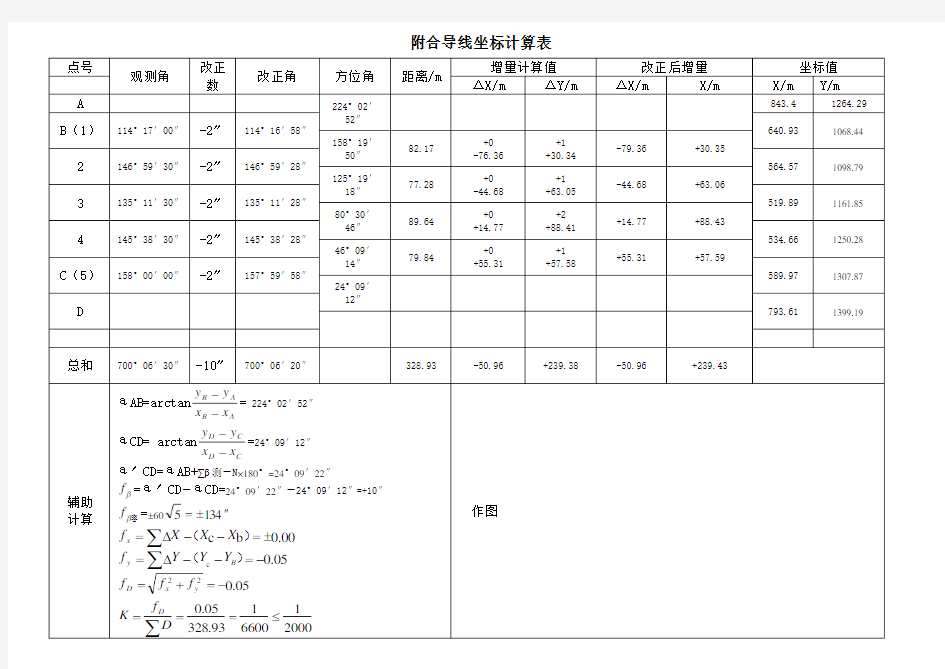
附合导线坐标计算表和空白表格
A 224°02′ 52″843.4 1264.29 B(1)114°17′00″-2″114°16′58″640.93 1068.44 158°19′ 50″82.17 +0 -76.36 +1 +30.34 -79.36 +30.35 2 146°59′30″-2″146°59′28″564.57 1098.79 125°19′ 18″77.28 +0 -44.68 +1 +63.05 -44.68 +63.06 3 135°11′30″-2″135°11′28″519.89 1161.85 80°30′46″89.64 +0 +14.77 +2 +88.41 +14.77 +88.43 4 145°38′30″-2″145°38′28″534.66 1250.28 46°09′14″79.84 +0 +55.31 +1 +57.58 +55.31 +57.59 C(5)158°00′00″-2″157°59′58″589.97 1307.87 24°09′ 12″ D 793.61 1399.19 总和700°06′30″-10″700°06′20″328.93 -50.96 +239.38 -50.96 +239.43 辅助计算аAB=arctan A B A B x x y y - - = 224°02′52″ аCD= arctan C D C D x x y y - - =24°09′12″ а′CD=аAB+∑β测-N×180°=24°09′22″ β f=а′CD-аCD=24°09′22″-24°09′12″=+10″ 容 β f=±60" ± =134 5 ∑±= - - ? =00 .0 b c) (X X X f x ∑-= - - ? =05 .0 c ) ( B y Y Y Y f 05 .0 2 2- = + = y x D f f f 2000 1 6600 1 93 . 328 05 .0 ≤ = = = ∑D f K D 作图
(完整版)闭合及附合导线测量内业计算方法
闭合及附合导线测量内业计算方法(好东西) 1. 导线方位角计算公式 当β为左角时 α前=α后+β左-180° 当β为右角时 α前=α后-β右+180° 2. 角度闭合差计算 fβ=(α始-α终)+∑β左-n*180° fβ=(α始-α终)-∑β右+n*180° 3. 观测角改正数计算公式 Vβ=±fβ/ n 若观察角为左角,应以与闭合差相反的符合分配角度闭合差,若观察角为右角,应以与闭合差相同的符合分配角度闭合差。 4. 坐标增量闭合差计算 ∑△X=X终-X始 ∑△Y= Y终-Y始 Fx=∑△X测-∑△X FY=∑△Y测-∑△Y 5. 坐标增量改正数计算公式 VX=- Fx/∑D3Di VY=-FY/∑D3Di2 2 所以:∑VX= - Fx ∑VY= - FY 6. 导线全长绝对闭合差 F=SQR(FX^2+FY^2) 7. 导线全长相对闭合差 K=F/∑D=1/∑D/F 8. 坐标增量计算
导线测量的内业方法 本人不才悉心整理出来的望能给同行业人士提供点资料 (一)闭合导线内业计算 已知A点的坐标XA=450.000米,YA=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。 1 角度闭合差: 图6—8 闭合导线算例草图 角度的改正数△β为:
2、导线边方位角的推算 BC边的方位角 CD边的方位角 AB边的方位角 右角推算方位角的公式: (校核) 3、坐标增量计算 设D12、α12为已知,则12边的坐标增量为: 4、坐标增量闭合差的计算与调整 因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即: 但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而产生一个差值,这个差值称为坐标增量闭合差。分别用表示: 缺口AA′的长度称为导线全长闭合差,以f表示。由图可知: 图6—9 闭合导线全长闭合差 导线相对闭合差。 对于量距导线和测距导线,其导线全长相对闭合差一般不应大于1/2000。
附合导线平差步骤
附合导线平差步骤 Prepared on 22 November 2020
控制点坐标平差处理 城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。 导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。 在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。 如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下: (1)填表。 计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。 (2)角度闭合差的计算与调整。 如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角: α =αBA+180°+βA A1 α =αA1+180°+β1 12 α =α12+180°+β2 2C
+)αCD ′=α2C +180°+βC αCD ′=αBA +4×180°+∑β测左 计算终边坐标方位角的一般公式为: α终边′=α始边+n ·180°+∑β测左(2-5) 式中n 为导线观测角个数。 角度闭合差的计算公式为: f β测=α终边′-α终边(2-6) 图2-21附合导线计算示意图 角度闭合差f β的大小,表明测角精度的高低。对于不同等级的导线,有不同的限差(即f β容)要求,例如图根导线角度闭合差的允许值为: f β容=±60″n (2-7) 式中n 为多边形内角的个数。这一步计算见辅助计算栏,f β测=+41″,f β容 =±120″。 若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。调整是应注意:当用左角计算α终边′时,改正数的符号与f β测符号相反;当用右角计算α终边′时,改正数的符号与f β测符号相同。可将闭合差按相反符号平均分配给各观测角,而得出改正角: β=β测-f β测/n(2-8) 式中n 为多边形内角的个数。按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。 当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。 (3)坐标方位角的推算 根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。为了检核,最后应重新推算结束边的坐标方位角,它应与已知数值相等。否则,应重新推算。例如 αCD ′=α2C +180°+βC =139°50′18″+180°+49°02′38″=8°52′55″ (4)坐标增量的计算及闭合差调整
2-1 闭合导线的坐标计算
闭合导线的坐标计算 现以图6-11所注的数据为例(该例为图根导线),结合“闭合导线坐标计算表”的使用,说明闭合导线坐标计算的步骤。 1.准备工作 将校核过的外业观测数据及起算数据填入“闭合导线坐标计算表”中,见表6-6,起算数据用单线标明。 2.角度闭合差的计算与调整 (1)计算角度闭合差?如图6-11所示,n边形闭合导线内角和的理论值为: 两者之差,称为角度闭合差,用 ? (26-3和表6-?,说明所测水平角不符合要求,应对水平角重新检查或重测。 如果,说明所测水平角符合要求,可对所测水平角进行调整。 (3)计算水平角改正数?如角度闭合差不超过角度闭合差的容许值,则将角度闭合差反符号平均分配到各观测水平角中,也就是每 个水平角加相同的改正数vβ,vβ的计算公式为:
计算检核:水平角改正数之和应与角度闭合差大小相等符号相反,即(4)计算改正后的水平角?改正后的水平角βi改等于所测水平角加上水平角改正数 (11 ??? 不等于零,从而产生纵坐标增量闭合差Wx和横坐标增量闭合差Wy,即 3)计算导线全长闭合差WD和导线全长相对闭合差WK???从图6-12b可以看出,由于坐标增量闭合差Wx、Wy的存在,使导线不能闭合,1-1′之长度WD称为导线全长闭合差,并用下 式计算仅从WD值的大小还不能说明导线测量的精度,
衡量导线测量的精度还应该考虑到导线的总长。将WD与导线全长∑D相比,以分子为1的分数表示,称为导线全长相对闭合差 WK,即 以导线全长相对闭合差WK来衡量导线测量的精度,WK的分母越大,精度越高。不同等级的导线,其导线全长相对闭合差的容许 值WKP参见表6-3和表6-4,图根导线的WKP为1/2000。 如果WK>WKP,说明成果不合格,此时应对导线的内业计算和外业工作进行检查,必要时须重测。 (4) 计算检核:纵、横坐标增量改正数之和应满足下式(5)计算改 本例中导线边 5.计算各导线点的坐标 根据起始点1的已知坐标和改正后各导线边的坐标增量,按下式依次推算出各导线点的坐标: 将推算出的各导线点坐标,填入表6-6中的第11、12栏内。最后还应再次推算起始点1的坐标,其值应与原有的已知值相等,以作为计算检核。附导线的载流量对照表. 表6-6?闭合导线坐标计算表
附合导线计算方法及心得
附合导线计算方法 已知A (X=2507.69,Y=1215.63),B (X=2299.83,Y=1303.8),C (X=2166.74,Y=1757.27),D (X=2361.71,Y=1964.32)四点坐标,及a AB (起始边),a CD (终止边)计算得出。 ?AB =tan -1( XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。59”08.47’ =-22。59”08.47’+180=157000”52’(计算方位角为负,所以要加上180) 同理求出?CD 方位角坐标为46045”23 1:用求出 ?AB ±观测角(左正右负)±180,依次加减,得出最后的? ‘CD 方位角,用计算的方 位角?‘CD -?CD =闭合差值 B1方位角=157000”52’-192。14,24,,+180=144。46,28,, 12方位角=144。46,28,,-236。48,36,,+180=87。57,52,, 23方位角=87。57,52,,-170。39,36 ,,,+180=97。38,16,, 34方位角=97。38,16,,-180。00,48,, +180=97。17,28,, 4C 方位角=97。17,28,, -230。32,36,,+180=46。44,52,, ?‘CD -?CD =46。44,52,,-46045”23’ =-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=-6.2”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即: B1观测角=192。14,24,,-6”=192。14,18,, 12观测角=236。48,36,,-6”=236。48,30,, 23观测角=170。39,36,,-6”=170。39,30,, 34观测角=180。00,48,,-7”=180。00,41,, 4C 观测角=230。32,36,,-6”=230。32,30,, 用调整后的观测角计算方位角: B1方位角=157000”52’-192。14,18,,+180=144。46,34,,
总结 闭合导线测量
闭合导线测量---总结. 闭合导线的坐标计算 现以图6-11所注的数据为例(该例为图根导线),结合“闭合导线坐标计算表”的使用,说明闭合导线坐标计算的步骤。
1.准备工作 将校核过的外业观测数据及起算数据填入“闭合导线坐标计算表”中,见表,起算数据用单线标明。 2.角度闭合差的计算与调整
n边形闭合导线内角和的理论值为:)计算角度闭合差,(1 n——导线边数或转折角数。式中 由于观测水平角不可避免地含有误差,致使实测的内角之和不 f,两者之差,称为角度闭合差,用表示,即等于理论值β (2)计算角度闭合差的容许值角度闭合差的大小反映了水平角观测f,其中 图根导线角度闭合差的容许值的质量。各级导线角度闭合差的容许值βp f的计算公式为:βp 应对水平角重新检查如果说明所测水平角不符合要求,>,或重测。 可对所测水平角进行调说明所测水平角符合要求,如果≤,
整。如角度闭合差不超过角度闭合差的容许值,(3)计算水平角改正数 则将角度闭合差反符号平均分配到各观测水平角中,也就是每个水平角加相同vv,的改正数的计算公式为:ββ 计算检核:水平角改正数之和应与角度闭合差大小相等符号相反,即 β等于所测水平角加上水改正后的水平角 4)计算改正后的水平角(i改平角改正数 n2)×180?计算检核:改正后的闭合导线内角之和应为(,本例为540-?。 3.推算各边的坐标方位角 根据起始边的已知坐标方位角及改正后的水平角,推算其它各导线边的坐标方位角。 本例观测左角,按式推算出导线各边的坐标方位角,填入表的第五栏内。 计算检核:最后推算出起始边坐标方位角,它应与原有的起始边已知坐标方位角
[技巧]闭合导线坐标计算表
[技巧]闭合导线坐标计算表 闭合导线坐标计算表 距离增量计算值改正后增量观测角改正数改正角坐标方位角 x y 点号 点号D ?′″ ″ ?′″ ?′″ ?x/m ?y/m ?x/m ?y/m /m /m /m 1 2 3 4 5 6 7 8 9 10 11 12 13 A 0.00 0.00 A -1 0 188 04 03 90.95 -90.05 -12.76 -90.04 -12.76 B 173 00 54 +19 173 01 13 -90.05 -12.76 B -1 0 181 05 16 114.12 -114.11 -2.17 -114.1 -2.17 C 92 43 42 +19 92 44 01 -204.16 -14.93 C -1 +1 93 49 17 154.21 -10.29 153.88 -10.28 153.87 D 89 04 09 +19 89 04 28 -214.45 138.95 D -1 0 02 53 45 135.83 135.65 6.86 135.66 6.86 E 196 15 00 +19 196 15 19 -78.80 145.81 E 0 0 19 09 04 69.40 65.36 22.77 65.36 22.77 F 79 57 54 +20 79 58 14 -13.44 168.58 F -1 0 279 07 18 89.27 13.94 -88.15 13.95 -88.15 G 170 35 12 +20 170 35 32 0.50 80.43 G 0 0 269 42 50 80.43 -0.50 -80.43 -0.5 -80.43 A 98 20 54 +19 98 21 13 0.00 0.00 A 188 04 03 B 总和 899 57 45 +135 900 00 00 734.21 +0.05 -0.01 0.00 0.00 f/m,,X,,0.05,x f/m,,Y,,0.01f,,,899:57'45",360:,,135",,,y理测,,, 辅 22f,,60"7,,159"f/m,f,f,0.05容Dxy助 计K,f/D,0.05/734.21,1/14000,1/2000,D算