基恩士KV3000CPU定位与H40S定位模块使用方法
Keyence_CPU&H40S_定位模块使用
CPU定位:KV_3000CPU 可以拖动2轴:X Y
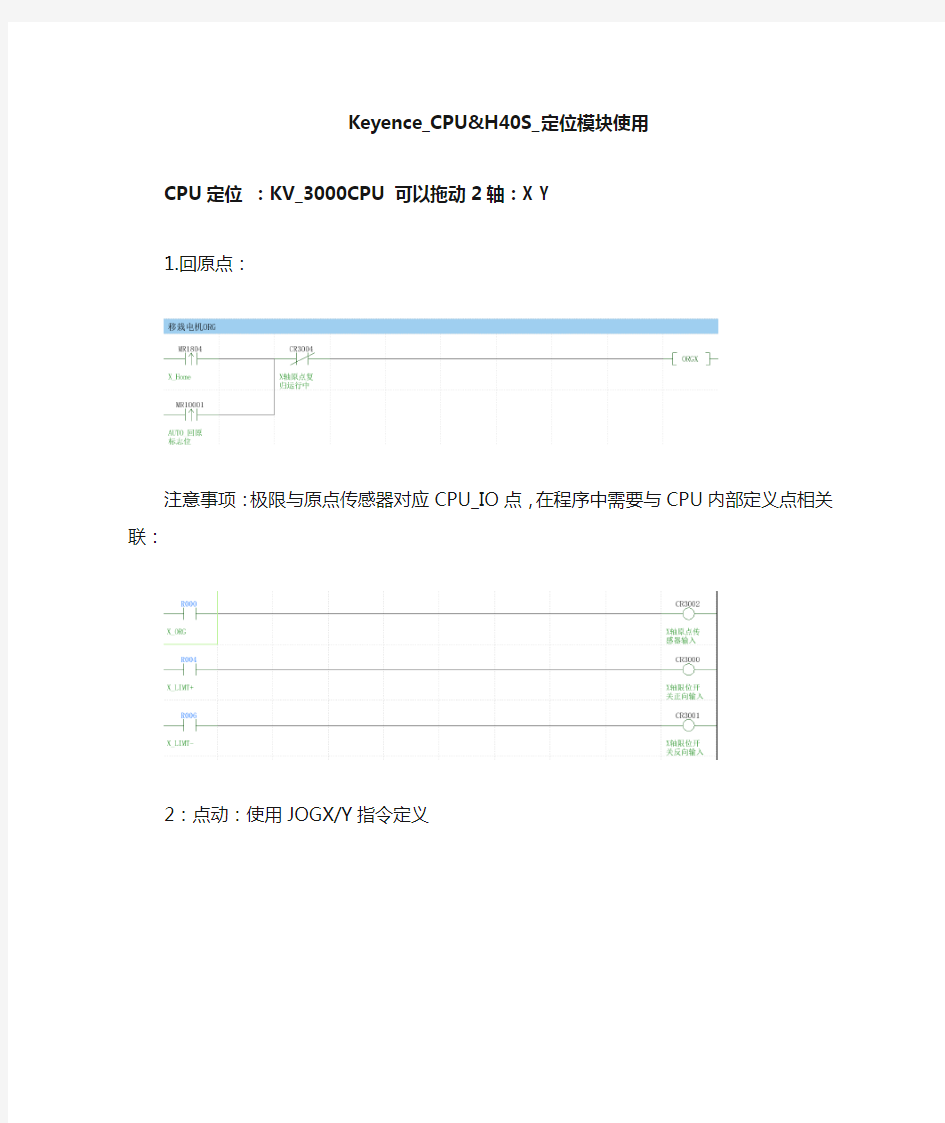
1.回原点:
注意事项:极限与原点传感器对应CPU_IO点,在程序中需要与CPU内部定义点相关联:
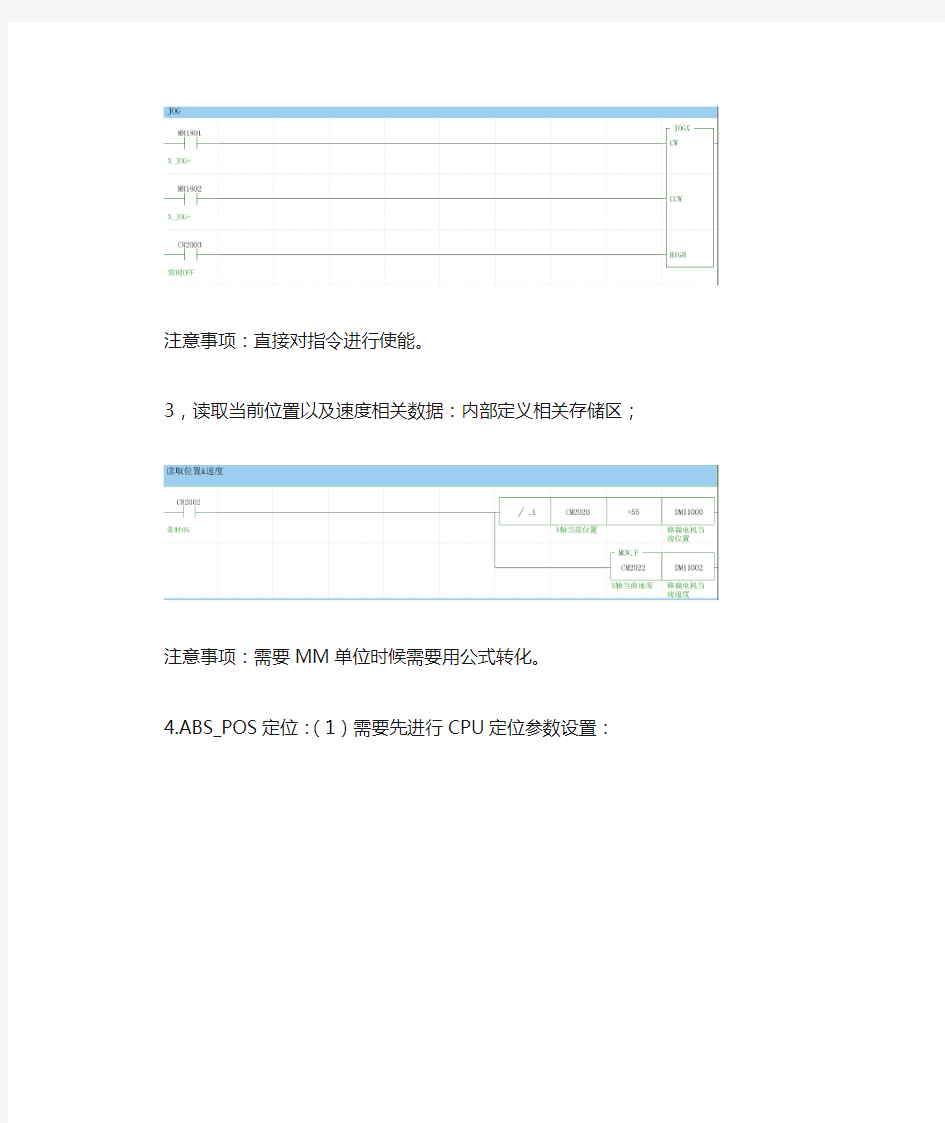
2:点动:使用JOGX/Y指令定义
注意事项:直接对指令进行使能。
3,读取当前位置以及速度相关数据:内部定义相关存储区;
注意事项:需要MM单位时候需要用公式转化。
4.ABS_POS定位:(1)需要先进行CPU定位参数设置:
(2)程序编写:
注意事项:应用到ABS位置模式顺控程序时,需要用到定位完成内部指令。
H40S定位模块:可以拖动4轴,X1,Y1,X2,Y2 1.回原点:
注意事项:内部点定义需要参照内部软元件表。
2.JOG:
3.ABS_POS定位:主要运用内部软元件实现。
CP243-1以太网通讯模块配置说明
CP243-1以太网通讯模块配置说明 必备条件: ?装有STEP 7Micro/WIN32软件的电脑。?PC/PPI 电缆。 首次、配置时必须要用到PC/PPI 电缆,将PC/PPI 电缆一头连接电脑的串口,另一头连接CPU 上的串口; 1、打开STEP 7Micro/WIN32软件,在查看栏选择“设置PC/PG 接口”; 2、为使用的借口分配参数选择:“PC/PPI cable(PPI)”; 3、点击“确定”按钮; 4、 在查看栏选择“通信”; 14 2 3
1、“点击刷新” 2、出现CP243-1后双击选择; 3、点击“确定”按钮; 1、在菜单栏中选择“工具”-->“以太网向导”; 1 3 1
1、点击“下一步”进入指定模块位置; 1、在此处选择模块在PLC中的位置,本次PLC中选择“6”; 2、也可以用“读取模块”按钮搜寻在线的CP243-1模块。 3、搜索到后选中; 4、点击“下一步”按钮。 (在本系统中,CP243-1模块是在6的位置,前方硬件有,CPU226、DO、DI、DI、DI、AI、AI 模块。) 1 1 2 3 4
1 2 34 1、在此处填写IP地址,PLC1为“192.168.147.11”,PLC2为“192.168.147.12”; 2、在此处填写子网掩码,PLC1、PLC2均为“255.255.255.0”; 3、选择模块的通讯类型,选择“自动检测通信”; 4、点击“下一步”按钮。 1 2 3 1、在此处填写模块占用的输出地址,使用“读取模块”功能会出现一个缺省值,建议使用缺省值。 2、配置允许连接CP243-1模块的电脑数量。 3、点击“下一步”按钮。
工业以太网通信协议研究及应用
工业以太网通信协议研究及应用 发表时间:2018-04-24T14:54:01.377Z 来源:《防护工程》2017年第36期作者:林立胜 [导读] Modbus/TCP是用于控制和管理自动化设备的Modbus系列通讯协议的派生产品。 南京富岛软件公司 210032 摘要:在绝大多数工业控制通信方面都是采用现场总线技术方式来实现的。但长期以来现场总线种类繁多、同时又没有统一标准而导致互不兼容,使得系统集成和信息集成面临着巨大挑战,所以引入了应用广泛、高速率、低成本的以太网技术。但以太网的可靠性和实时性比较差,难以适应工业控制的要求,故相关组织对以太网进行了一些扩展,称为工业以太网。随着工业4.0的发展,相信工业以太网技术将越来越重要。本文就常见工业以太网通信协议简介及应用作出阐述。 关键词:现场总线技术、工业以太网、EtherCat、Ethernet/IP、ProfiNet、Modbus/TCP、Ethernet/PowerLink、MechatroLink 1常见工业以太网通信协议 1.1、Modbus/TCP Modbus/TCP是用于控制和管理自动化设备的Modbus系列通讯协议的派生产品。 由此可见,它覆盖了使用TCP/IP协议的Intranet企业内部网和Internet互联网环境中Modbus报文的用途。 该协议的最常见用途是为例如I/O、PLC模块以及连接其它简单域总线或I/O模块的网关服务的。 Modbus/TCP协议是作为一种实际的自动化标准发行的。既然Modbus已经广为人知,该规范只将别处没有收录的少量信息列入其中。 然而该规范力图阐明Modbus中哪种功能对于普通自动化设备的互用性有价值,哪些部分是Modbus作为可编程的协议交替用于PLC的多余部分。 Modbus/TCP 在美国比较流行,它由两部分组成,即IDA分散式控制系统的结构与Modbus/TCP 的信息结构的结合。Modbus/TCP定义了一个简单的开放式又广泛应用的传输协议网络用于主从通讯方式。 1.2.、Ethernet/IP Ethernet/IP是一个面向工业自动化应用的工业应用层协议,这里的IP表示Industrial-Protocal。 它建立在标准UDP/IP与TCP/IP协议之上,利用固定的以太网硬件和软件,为配置、访问和控制工业自动化设备定义了一个应用层协议。Ethernet/IP是在应用层提高了以太网的实时性。 1.3、EnterCat EtherCat以太网控制自动化技术是一个以Ethernet以太网为基础的开放架构的现场总线系统。 EtherCat名称中的Cat为Control Automation Technology控制自动化技术首字母的缩写,最初由德国倍福自动化有限公司BeckhoffAutomationGmbH研发。 EtherCat为拓扑的灵活性和系统的实时性能树立了新的标准,同时它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括可选线缆冗余、功能性安全协议(SIL3)和高精度设备同步。 EtherCat通过协议内部的优先权机制可区别传输数据的优先权(Process Data),组态数据或参数的传输是在一个确定的时间段中通过一个专用的服务通道进行(Acyclic Data),EtherCat操作系统的以太网功能与传输的IP协议兼容。 EtherCat设备分从站和主站,从站一般是伺服驱动器、IO模块、板卡、网关等等,主站通常是运动控制器等。 1.4、Ethernet/PowerLink 鉴于以太网的蓬勃发展和CanOpen在自动化领域的广阔应用基础,Ethernet/PowerLink融合了这两项技术的优缺点,既拥有Ethernet 的开放性、高速接口,又参考了CanOpen在工业领域良好的PDO和SDO数据定义; 在某种意义上说Ethernet/PowerLink就是Ethernet上的CanOpen,在物理层、数据链路层使用了Ethernet介质,而应用层则保留了原有的PDO和SDO对象字典的结构。 Ethernet/PowerLink主攻方面是同步驱动和特殊设备的驱动要求。 1.5、MechatroLink MechatroLink是一个用在工业自动化的开放式通讯协定,最早由安川电机开发,现在则由MechatroLink协会Mechatrolink Members Association维护。 MechatroLink协议分为两种: MechatroLink-III,定义传送接口为以太网的通讯协定架构,速度最快为100Mbit/s,允许最多62个从站。 MechatroLink-II,定义传送接口为RS-485的通讯协定架构,速度最快为10Mbit/s,允许最多30个从站; MechatroLink的目标领域主要是以运动控制为中心的现场网络,可连接的设备包括CNC、PLC、PC卡、运动控制器、变频器、外围图像处理设备、伺服驱动器、外围IO设备等。 MechatroLink协会的主要成员基本上都是日本的自动控制厂商,包括欧姆龙、横河电机、安川电机等。 1.6、ProfiNet ProfiNet由西门子主导的Profibus国际组织ProfiBus International-PI推出,是基于工业以太网技术的自动化总线标准。 作为一项战略性的技术创新,ProfiNet为自动化通信领域提供了一个完整的网络解决方案,涵括了例如运动控制、实时以太网、网络安全、分布式自动化以及故障安全等当前自动化领域的热点话题; 作为跨供应商的技术,ProfiNet可以完全兼容工业以太网和现有的现场总线如ProfiBus技术,保护现有投资。 ProfiNet是适用于不同需求的完整解决方案,其功能包括8个主要的模块,依次为运动控制、分布式自动化、网络安装、实时通信、IT 标准和信息安全、故障安全、过程自动化和分布式现场设备。
CP1W-CIF41欧姆龙(CP1H)以太网通信完美操作说明
CP1W-CIF41欧姆龙以太网通信-FINS ——陆 一:连接设置 节点号要正确要不CP1W-CIF41的ERROR灯闪(如CP1W-CIF41 IP为192.168.250.1,节点号即为1,与最后一段相同)。使用插槽1时4开关要置ON,使用插槽2时5开关要置ON,否则ERROR灯常亮。 PLC的串行选件端口插以太网模块时设置要改成115200 7,2,E HOST LINK 若是不知道模块的IP,可以从PLC内存查看: 新建一个USB连接PLC的工程——在线工作——查看存IP地址的数据寄存器 例如放在选件板2的位置,则IP地址在D32300+155=D32455,D32456两个地址查看;注意地址D后面不要带M。
(右键点击空白栏,编辑即可输入并查看) 连接方法1:知道模块IP后。设置电脑IP与模块处于同一个网段即可。FINS节点号即为模块IP的最后一个。 连接方法2:登陆http://192.168.250.1(模块的IP)/c00.htm 注意:有时候模块要与电脑处于同一个网段才能连上(如模块192.168.250.1,电脑要为192.168.250.2)密码:ETHERNET
修改完成以后点击传送,然后点击重启即可。 二:FINS指令: 学习利用网络调试助手发送FINS命令对PLC进行操作,首先要学习FINS的通讯格式; 1、FINS指令格式 手册中的格式如下:
举例说明: 利用FINS/TCP的方式读取PLC的DM1通道的数据,格式解析如下: MR、SR参见FINS命令第5章; 前面的ICF、RSV等为指定一些目标地址和源地址的网络号、节点号、单元号及其他固定的格式,后面关于Command code以及TEXT的内容,需要根据上位机实现什么的操作,填写不同的操作数据,就读取DM1通道的数据; DM区的Memory area code为82; 读取存储区的Command code为0101;
Profinet工业以太网实时通信协议分析
通用低压电器篇 孙凡金(1977 ),男,副教授,博士,研究方向为网络控制系统。 Profi net 工业以太网实时通信协议分析 孙凡金,!刘彦呈,!潘新祥 (大连海事大学轮机工程学院,辽宁大连!116026) 摘!要:在分析P ro fi net 关键技术组成的基础上,对其实时性优化技术进行了综述,并通过分析通信连接的建立及维护,实时协议的组成及通信策略,以及RT 与I RT 的通信技术与实现方法,从整体上研究了P rofi net 实时性优化的协议组成及基本特性,对设计与优化基于Profi net 工业以太网的自动化系统具有一定借鉴。 关键词:Prof i ne t ;实时性;通信连接;同步 中图分类号:T P 393.04!文献标识码:A !文章编号:1001 5531(2008)21 0030 04 The Anal ysis of the Real T i m e Co mmun icati on Protocol i n Profinet !!! SU N Fanji n ,!LIU Yancheng,!PAN X i n x iang (Schoo l ofM arine Eng i n eeri n g ,Da lian M ariti m e Un iversity ,Da lian 116026,Ch i n a) !!Abstract :Based on the analysis o f P ro fi net ?s key techno l ogy ?s constituti on ,its rea l ti m e opti m iza tion tech no l ogy w as survey ed .By ana l yz i ng t he buil d and m ai n tenance of co mmun ica ti on connect ,rea l ti m e protoco l ?s con stituti on and communicati on stra tegy ,RT and I RT ?s communicati on techno logy and rea liza ti onm e t hod ,t he protoco l constit ution and basi c character i stics for P ro fine t rea l ti m e opti m i zati on w ere st udied ,wh ich can be re ference f o r de si gn i ng and opti m izi ng autom ati c system based on Profi net . K ey words :Profi n et ;real ti m e ;co mmun icati on connect ;synch ronous 刘彦呈(1963 ),男,教授,博士生导师,研究方向为工业监控网络。潘新祥(1964 ),男,教授,从事船舶网络化监控技术的研究。 0!引!言 Profinet 是国际组织P NO (Pro fi b us N ati o na l O rganizati o n)提出的用于工业自动化的实时以太网标准[1,2] 。为支持不同工业级应用,Profi n et 提 供了集成式Profinet I O 和分布式自动化中创建模块化设备系统的Pro fi n et CBA [3] 。Profinet I O 对分布式I/O 使用实时通信(RT)和同步实时通信(I R T)协议。RT 通信时钟周期可达10m s 量级,适用于工厂自动化的分布式I/O 系统。I RT 通信时钟周期可达1m s 量级,适用于运动控制系统[4,5]。Profinet CB A 使用TCP /I P 和RT 两种基于组件的通信方式。它允许时钟周期由TCP 协议的100m s 量级降至RT 的10m s 量级,从而更适用于PLC 之间的通信。本文通过分析Profinet 实时性协议的组成,对其通信连接建立及管理、实 时同步机制、等时同步实现方法及关键技术进行 了深入分析,阐述了Profi n et 实时通信解决方案实现方法。 1!Pro fi net 协议架构 传统的以太网使用CS MA /CD (带有冲突监测的载波监听多路访问)协议实现介质访问控制,虽然工业以太网可使用标准的通信协议(如TCP /I P 或UDP /I P)来提高其实时性,但数据包的传输时延很大程度上依赖网络负载而不能预先确定,因此标准协议通信过程中会产生帧过载现象,这即加大传输时延及处理器计算时间,从而延长发送周期,严重影响网络的实时性。为此,Profi net 通过对发送器和接收器的通信栈进行实时性优化,可保证同一网络中不同站点可在一个确定时段内完成时间要求严苛的数据传输。Profine t 30
3-工业以太网协议--接口定义
工业以太网--接口定义 (方垒2005.1.4) 目的: 为了节约时间,将工业以太网协议开发与应用开发并行进行,我们通过“接口定义讨论稿”――>“讨论”――>“接口定义”正式版的方式来预先定义“应用开发”使用“工业以太网协议”的方式。该接口定义直接关系到应用开发和协议开发双方后期工作是否能顺利进行,所以请相关人员务必重视,详细考虑以下接口,最终确定的接口应该是:即能够满足应用开发需求,对于协议开发方又是简洁可实现的。 接口定义: 支持基于报文的节点间任意点对点通讯以及广播通讯方式,每个数据包必须在以太网物理帧的限定之内,即1500字节: 物理帧:6 + 6 +2 +[46-1500] +4CRC 字节 对应:目的地址+源地址+类型+数据区+32bit校验和 提供C语言编写的接收、发送API接口,该接口是: ◆非面向连接的 ◆非阻塞的 ◆支持类似UDP的“端口”的概念。且多个进程可同时操作工业以太网接口。 接口原形如下: #ifndef IEAPI_H #define IEAPI_H /*应用层使用的消息包头, 与HS2000CAS、MACSx消息结构兼容, 例如:10号站的B机端口20要从系统网发送1000字节长的消息给1号站A、B两机端口21,则消息格式如下: int Length =1000。 BYTE Type =4; BYTE Protocol =xx; BYTE SID =10; BYTE SIDEXT =00000010B; BYTE DID =1;
BYTE DIDEXT =00000011B(即3); BYTE Reserved[4] ={0,0,0,0}; BYTE srcPort = 20; BYTE dstPort =21; */ #define TYPE_CMD 0/*工业以太网协议控制通道*/ #define TYPE_RNET 3/*备份网*/ #define TYPE_SNET 4/*系统网*/ #define INDEX_SNETA 0/*系统网A*/ #define INDEX_SNETB 1/*系统网B*/ #define INDEX_RNET 2/*备份网*/ typedef struct s_MsgHead{ unsigned long Length; /*纯数据的长度,注意,不包括该头的长度16字节,只是后面数据部分的长度。*/ unsigned char Type; /*消息类型,3:备份网,4:系统网*/ unsigned char Protocol;/*协议号*/ unsigned char SID;/*源节站号,*/ unsigned char SIDEXT;/*源节子站号,*/ unsigned char DID;/*目的站号,比如:10号站A或B机,都填10,注意:DID = 0表示广播,网上所有节点都接收该报文*/ unsigned char DIDEXT;/*目的子站号,比如:10号站A机,则填00000001B,B机则填00000010B,AB机则填00000011B*/ unsigned char Reserved[4];/*保留*/ unsigned char srcPort;//源端口 unsigned char dstPort;//目的端口 }MsgHead; /*应用层消息结构*/ typedef struct s_Msg{ MsgHead Head;/*应用层使用的消息包头,与HS2000CAS、MACSx消息结构兼容*/ unsigned char Data[1514-14-8-sizeof(MsgHead)=1476];/*应用层使用的消息数据区*/ }Msg; /* 功能描述:初始化工业以太网协议,并设置本机节点号, 输入说明:nodeID定义,共8bit,最高bit:0表示A机、1表示B机,低位的6bits:站号, 例如: 10号站A机,则:nodeID=00001010B =0 +10 =10 10号站B机,则:nodeID=10001010B =128 +10 =138 输出说明:返回true:设置成功,false:设置失败 */
以太网数据监听工具使用说明[精选.]
以太网数据监听工具使用说明2015-7-24 现在基于以太网通信越来越多,其中用网关(通信管理机BK-TX3001)来解析其他厂家综保等设备以太网规约较为常用,迫切需要对通信状况(报文)进行检测,而网口之间通讯数据较难捕捉,比如通讯管理机与保护装置之间进行网络通讯的时候,电脑作为第三方无法通过普通交换机捕捉到通讯管理机与保护装置之间通讯数据,因而需要调试通讯管理机与保护装置之间的通讯规约时比较困难。为解决此问题需采用如下方法。 1)具有端口镜像功能的交换机如TP-LINK 型号:TL-SF2005 ,为便宜设备,电脑通过镜像端口可监听3个端口的数据交换,一般交换机没有此功能; 2)使用工具软件如IPTOOL网络抓包工具,通过IP地址简单配置,可监听改IP地址的报文交换。 这样就可通过第三方(比如电脑)监听另外两台设备之间的网络通讯数据,方便现场调试。 TL-SF2005交换机说明:该交换机为不可配置网管型交换机,其中包含三个普通交换接口,一个监控口,一个上联口,端口功能固定不可配置。 交换机接线说明:将需要抓包的通讯装置经网线连接至交换机1-3普通交换接口上面,需要抓包的电脑连接至监控口即可。如需要监视通讯管理机与保护装置之间的网络数据,将通讯管理机与保护装置连接至交换机普通接口,将电脑连接至交换机监控口。 网络抓包软件使用说明:注可参见文件夹中的使用说明文档。 注:使用软件前先将监控电脑IP地址设置为与被监控IP地址在同一网段。 1、打开软件IPAnalyse.exe。如下所示: 2、点击操作->捕包过滤,进行设置 (1)、选择网卡,设置为当前要使用进行抓包的网卡。
各种工业以太网的区别其实就是协议的区别,其中最主要的还是应用层协议的区别。
各种工业以太网的区别其实就是协议的区别,其中最主要的还是应用层协议的区别。 都是以太网通讯,只是每个公司的叫法不一样,西门子用PROFINET、AB用Ethernet IP、施耐德的MODBUS TCP/IP。取个例子,以太网就像高速公路,Ethernet/IP、Profinet、Modbus TCP/IP分别像高速公路上的宝马、奔驰、奥迪车,都可以从一个城市把物品运送到另一城市。但是每个车上安装的零件无法和另一车上的零件进行更换。EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EterCAT名称中的CAT 为ControlAutomation Technology(控制自动化技术)首字母的缩写。最初由德国倍福自动化有限公司(Beckhoff AutomationGmbH)研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。Ethernet/IP是一个面向工业自动化应用的工业应用层协议。它建立在标准UDP/IP与TCP/IP协议之上,利用固定的以太网硬件和软件,为配置、访问和控制工业自动化设备定义了一个应用层协议西蒙公司开发 Ethernt/IP属于ODVA组织,Rockwell只是其中一个推广力度比较大的公司而已。施耐德也是ODVA组织的成员,施耐德所有PLC都可以支持Ethernt/IP协议。Ethernt/IP协议是十大总线之一,和Controlnet、Devicenet一起称为CIP总线。可以实现协议间路由,但是需要Rslinx软件进行配置。通讯时需要设置RPI参数,没有任何客户端的反馈信息,因此不管现场客户端是否收到数据,数据一致由服务器不断的发,缺少相应的检测。PROFINET由PROFIBUS国际组织(PROFIBUS International,PI)推出,是新一代基于工业以太网技术的自动化总线标准。作为一项战略性的技术创新,PROFINET为自动化通信领域提供了一个完整的网络解决方案,囊括了诸如实时以太网、运动控制、分布式自动化、故障安全以及网络安全等当前自动化领域的热点话题,并且,作为跨供应商的技术,可以完全兼容工业以太网和现有的现场总线(如PROFIBUS)技术,保护现有投资。PROFINET是适用于不同需求的完整解决方案,其功能包括8个主要的模块,依次为实时通信、分布式现场设备、运动控制、分布式自动化、网络安装、IT标准和信息安全、故障安全和过程自动化。 MODBUS/TCP是简单的、中立厂商的用于管理和控制自动化设备的MODBUS系列通讯协议的派生产品。显而易见,它覆盖了使用TCP/IP协议的“Intranet”和“Internet”环境中MODBUS 报文的用途。协议的最通用用途是为诸如PLC’s,I/O模块,以及连接其它简单域总线或I/O模块的网关服务的。 MODBUS/TCP协议是作为一种(实际的)自动化标准发行的。既然MODBUS已经广为人知,该规范只将别处没有收录的少量信息列入其中。然而,本规范力图阐明MODBUS中哪种功能对于普通自动化设备的互用性有价值,哪些部分是MODBUS作为可编程的协议交替用于PLC’s的“多余部分”。 它通过将配套报文类型“一致性等级”,区别那些普遍适用的和可选的,特别是那些适用于特殊设备如PLC’s 的报文。 Modbus TCP/IP由Modbus IDA组织提出,有施耐德旗下的Modicon公司主推,在目前施耐德所有PLC产品中都支持,同时也支持Ethernet/IP协议,Modbus TCP/IP是免费的、全开放协议,可以用VB等高级编程语言调用winsock控件即可实现与PLC的数据通讯,因此,很多产品都支持该协议。同时利用该协议进行通讯时,可以得到客户端的数据校验返回,因此可靠性和安全性较高,当然牺牲了数据量。 POWERLINK=CANopen+Ethernet 鉴于以太网的蓬勃发展和CANopen在自动化领域里的广阔应用基础,EthernetPOWERLINK 融合了这两项技术的优点和缺点,即拥有了Ethernet的高速、开放性接口,以及CANopen在工业领域良好的SDO 和PDO 数据定义,在某种意义上说POWERLINK就是Ethernet 上的CANopen,物理层、数据链路层使用了Ethernet介质,而应用层则保留了原有的SDO和PDO对象字典的结构 虽然这些工业以太网都是国际标准,但是指的是IEC 61784里的标准,但是这些工业以太网不都是标准的以太网。即这些工业以太网并不都是符合IEEE802.3U的标准,这当中只有Modbus-TCP和EtherNet/IP是符合IEEE802.3U 的,只有符合IEEE802.3U标准的,才能与IT和以太网将来的发展相兼容。而不符合IEEE802.3U标准的,基本上可以讲不是以太网,它们都对以太网进行了修改,或者是硬件或者是软件,已经不是以太网了。 a. Modbus TCP和EtherNet/IP的区别主要是应用层不相同,ModbusTCP的应用层采用Modbus协议,而EtherNet/IP采用CIP协议,这两种工业以太网的数据链路层采用的是CSMA/CD,因此是标准的以太网,另外,这两种工业以太网的网络层和传输层采用TCP/IP协议族。还有一个区别是,Modbus协议中迄今没有协议来完成功能安全、高精度同步和运功控制等,而EtherNet/IP有CIPSafety、CIP Sync和CIP Motion来完成上述功能, ------来源网络,仅供参考
工业以太网的常见协议
工业以太网的常见协议 摘要: 1 Modbus TCP/IP 该协议由施耐德公司推出,以一种非常简单的方式将Modbus 帧嵌入到TCP 帧中,使Modbus 与以太网和TCP/IP 结合,成为Modbus TCP/IP。这是一种面向连接的方式,每一个呼叫都要求一个应答,这种呼叫/应答... 1 Modbus TCP/IP 该协议由施耐德公司推出,以一种非常简单的方式将Modbus 帧嵌入到TCP 帧中,使Modbus 与以太网和TCP/IP 结合,成为Modbus TCP/IP。这是一种面向连接的方式,每一个呼叫都要求一个应答,这种呼叫/应答的机制与Modbus 的主/从机制一致,但通过工业以太网交换技术大大提高了确定性, 改善了一主多从轮询机制上的制约。 2 Profinet Profinet 由Siemens 开发并由Profibus International 支持,目前它有3 个版本,第一个版本定义了基于TCP/UDP/IP 的自动化组件。采用标准TCP/IP+ 以太网作为连接介质,采用标准TCP/IP 协议加上应用层的RPC/DCOM 来完成节点之间的通信和网络寻址。它可以同时挂接传统Profibus 系统和新型 的智能现场设备。现有的Profibus 网段可以通过一个代理设备(proxy)连接到Profinet 网络当中,使整套Profibus 设备和协议能够原封不动地在Profinet 中使用。传统的Profibus 设备可通过代理与Profinet 上面的COM 对象进行通 信,并通过OLE 自动化接口实现COM 对象之间的调用。它将以太网应用 于非时间关键的通信,用于高层设备和Profibus-DP 现场设备技术之间,以便
基恩士视觉系统操作手册
07 视觉系统操作说明 07有4套控制系统,分别是视觉系统,视觉控制系统,视觉控制系统,视觉控制系统。本说明书就以视觉系统为例讲解说明调试。 1.0 开启电源后视觉系统自动进入开机画面,显示初始画面。 1 2 状态区域 偏移量 3 初始画面中显示1,2,3 三个相机的当前画面。 1画面:显示相机1当前画面 2画面:显示相机2当前画面 3画面:显示相机3当前画面 状态区域:显示正在进行拍摄的结果(:拍摄完成,:再次拍摄 :拍摄错误) 偏移量:表示拍摄结果输出的补偿值。
1.1 滑动遥控器介绍 1号按键 (功能键)切换功能菜单的显示和非显示 2号按键 (退出键) 设定时返回前面一个界面或者退出 3 号按键 (拍摄键) 一齐输入触发 4号按键 (屏幕键) 按顺序切换现在显示的画面的显示类别 5 号按键 (画面切换) 显示查看栏,切换画面的扩大/缩小,显示模式 6 号按键 (主菜单) 更改对话框菜单的浓度 7号按键 (调试功能) 在流程编辑画面中切换通常显示/扩大显示 按键 7号按键 键 光标 按键
1.2进入操作权限 按下按键1,弹出功能菜单对话框,移动光标至实用功能,进入对话框, 选择用户帐号切换,弹出用户帐号切换对话框。 用户选择框中选择,用户密码是2222 。点击,进入操作权限了。
1.3建立视觉模板 视觉模板是视觉系统在生产中比对各种不同位置产品的模板,所以建立模板是必须选择轮廓明晰,表面清洁的产品。建立模板的产品必须放置在视觉图片的中央位置,便于视觉系统快速比对产品。 进入权限后,按遥控器背面7号按键,进入菜单。一共有4步和选项,(3和4出厂 设置不必更改) 1 相机设定 点击1,进入相机设定画面,可供选择每个相机的设定。在此,选择相机1举例。 快门速度() 相机感度
S SMART 通讯问题 以太网设置
一:TCP 协议通讯 (一)S7 200 SMART之间的TCP通讯 TCP是一个因特网核心协议。在通过以太网通信的主机上运行的应用程序之间,TCP 提供了可靠、有序并能够进行错误校验的消息发送功能。TCP 能保证接收和发送的所有字节内容和顺序完全相同。TCP 协议在主动设备(发起连接的设备)和被动设备(接受连接的设备)之间创建连接。一旦连接建立,任一方均可发起数据传送。 TCP协议是一种"流"协议。这意味着消息中不存在结束标志。所有接收到的消息均被认为是数据流的一部分。 S7 200 SMART与之间的TCP通讯可以通过两边调用OUC(开放式用户通讯)指令库中的TCP_CONNECT、TCP_SEND、TCP_RECV、DISCONNECT指令来实现。 图1.开放式用户通讯库 开放式用户通信库需要使用50 个字节的V 存储器。 开放式的用户通讯连接资源包括8个主动连接和8个被动连接。 只可从主程序或中断例程中调用库函数,但不可同时从这两个程序中调用。 所需条件: 1、软件版本:STEP 7-Micro/WIN SMART 2、SMART CPU固件版本: 3、通讯硬件:TP电缆(以太网电缆) 所完成的通讯任务: 将作为客户端的PLC(IP地址为)中VB0-VB3的数据传送到作为服务器端的PLC(IP 地址为)的VB2000-VB2003中。
S7-200 SMART 客户端编程 1、设置本机IP地址 在客户端设置IP地址为 图2.设置IP地址 2、建立TCP连接 调用TCP_CONNECT指令建立TCP连接。设置连接伙伴地址为,远端端口为2001,本地端口为5000,连接标识ID为1。利用使能Active,设置为主动连接。 图3.调用TCP_CONNECT指令 指令的参数
以太网通讯使用说明
用网线把控制器连接到路由器上。 通过window自带命令窗口,使用IPCONFIG命令可以查看本机电脑ip地址配置,如下图所示: 根据电脑主机的ip地址,例如IP为192.168.2.54。为控制器分配同一个网段内且没有被使用的IP地址192.168.2.2。 在电脑上通过命令窗口的ping命令检测网络是否连通,如下图所示:
问题,系统是否上电。 网络正常后,可以打开通讯软件,设置IP地址,如下图所示:
下图所示: 选择Com串口传输下载, 选择Net网口传输下载。 [SearchDeviceID]此软件将从设置的设备搜索范围1 to 5(注:此范围可认为修改),搜索到 的CNC设备将以设备号ID在软件坐标列表中列出1 2 …n号设备,选择对应的设备号双击 手标将CNC设备下位机的目录文件以列表方式显示在中间的列表框。通过鼠标操作可直接对 目录文件进行类似Windows系统资源管理器的进入目录文件读取删除等操作。 [ReadNCDeviceDir]:列出当前选定的设备ID号CNC系统的文件目录列表操作。 [ReturnNCDeviceDir]:返回当前选定的设备ID号CNC系统的文件目录上级目录操作。 [SendFileToCNC]:发送本机的NC或其他文件至当前选定的设备ID号CNC系统当前目录中。
[NCDeviceID]:当前选定的设备ID号 [NCDeviceIP]:当前选定设备ID号绑定的IP地址(注:当采用网络通信传输时) [COM]:当前选定设备ID号选择的串口通信端口号(注:当采用串口通信传输时) [BaudRate]: 当前选定设备ID号选择的串口通信波特率 Save As NC File:将读取到右边编辑框的下位机NC设备的文件另存到本地电脑。 [SetIPaddr]:当采用网络通信时,不同CNC设备ID号必需绑定对应的IP地址,否侧无法通信传输,对于无使用的设备ID号其对应的绑定IP地址均设为0,否则通信传输会出错。
以太网通讯HMI说明
装调修比赛以太网通讯HMI操作说明 系统型号:K2000MCi 系统版本:K2000MCi_A01_V3.1.13a_160909 HMI软件版本:HMI1.8.3 网线:家用网线 使用说明如下: 1.设置系统参数 录入方式下,设置页面,按下屏幕下方参开关对应软按键,通过按下按键把参数开关打开: P8111(本机IP)=192.168.1.101(系统出厂默认设置); P8112(子网页面)=255.255.255.0(系统出厂默认设置) P8113(默认网关IP)=192.168.1.1(系统出厂默认设置); P8114(服务器IP)=192.168.1.2(系统出厂默认设置); 注:以上四个参数是系统通过网线与电脑连接的基本参数也是唯一参数,这四个参数可以修改也可以不修改,一定要灵活,如果不修改,那么意味电脑设置通讯协议参数时需要按系统提供的默认参数设置;反之,系统按照电脑设置的通讯协议参数设置参数,电脑端的参数就不需要动了。总之,系统和电脑两个东西,互为参照,最终设置目的要保持一致。我们一般采用不改系统参数改电脑的方式,这样比较省事。 2.关闭电脑防火墙(同时关闭其他杀毒软件) 安装软件前建议将防火墙和杀毒软件关闭,否则可能出现安装时软件被隔离,安装成功后,连不上系统的问题,如果关闭防火墙,以win7系统为例说明:双击”我的电脑”打开---菜单栏找到”控制面板”打开----找到”系统和安全”打开---找到”windows防火墙”打开---对话框左侧找到”打开或关闭windows防火墙”打开---选择”关闭Windows防火墙” (家庭和公用都关闭) 3.电脑侧设置本地连接的Internet 协议4 右击电脑屏幕右下角无线网标志---选择打开”网络和共享中心”---找到“本地连接”打开---选择“属性”打开---选择“Internet 协议版本4(TCP/IPv4)”打开---选择“使用下面IP地址”,具体设置如下: 电脑侧IP地址=P8114 电脑侧子网掩码= P8112 电脑侧默认网关= P8113 注:这个设置是保持系统参数不变设置电脑的参数;如果反过来,电脑参数被人提前任意设置好,保持电脑不变而是修改系统参数使得两者保持一致,也希望大家会,其实很简单,就是把电脑设置的IP地址,子网掩码,默认网关设置到系统P8114、P8112、P8113,另外特别注意是参数P8111,一定要保证和P8114在一个网段(参数设置完成后一定要在程序---网络页面刷新一次,否则本机IP不会更新到网络页面导致电脑与系统连接不上),否则系统连接不上。
SiemensSCP以太网模块通讯设置图文稿
S i e m e n s S C P以太网模 块通讯设置 文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688]
S7 200 CP243-1以太网模块通讯设置 一、条件与准备 1.带有STEP 7 Micro/WIN32(版本 3.2 SP1以上)软件的编程设备;本 例编程软件版本为STEP 7 Micro/WIN V4.0 SP3; 2.一根PC/PPI 电缆、一根以太网直连电缆或交叉电缆; 3.一个CPU22X,符合以下类型要求: CPU 222 REL. 1.10 或以上; CPU 224 REL. 1.10 或以上; CPU 226 REL. 1.00 或以上; CPU 226XM REL. 1.00 或以上; 本例为CPU224 REL 02.01; 4.一个CP243-1以太网通讯模块,订货号为 6GK7 243-1EX01-0XE0,为 新型以太网通讯模块(相当于之前的CP 243-1 IT :6GK7 243-1GX00-0XE0)。 二、通讯设置 1.启动STEP 7 Micro/WIN V4.0 SP3编程组态软件 方法一:开始-所有程序-Simatic-STEP 7-MicroWIN V4.0- STEP 7-MicroWIN,如下图所示: 方法二:双击桌面快捷方式“V4.0 STEP 7-MicroWIN”图标,如下图所示: STEP 7-MicroWIN 程序启动后,如下图所示: 2.设置通讯方式
用PC/PPI 电缆连接编程设备的USB口及CPU224的COM串口,点击左侧View视图框内的Set PG/PC Interface图标,如下图所示:选择PC/PPI cable(PPI),点击Properties,进入属性设置窗口,如下两图所示: 注意Local Connection选项卡里的编程设备接口的设置选择(USB或COM),本例为USB。点击OK按钮确定,回到图5Set PG/PC Interface 窗口,点击OK按钮确定,弹出Warning窗口,点击“确定”按钮,完成通讯方式设置。 3.配置CP243-1通讯模块 由于所用的CP243-1以太网通讯模块,订货号为 6GK7 243-1EX01- 0XE0,是 Internet 通讯模块,因此,必须用Internet wizard向导对CP243-1进行 配置。 点击左侧Tools图框内的Internet wizard图标,启动Internet wizard配置向导,如下图所示: 或者在项目树视图里选择Wizard-Internet,双击Internet图标,进入Internet wizard配置向导。 Internet wizard配置向导启动后,如下图所示: 点击Next按钮,进入CP243-1以太网模块槽位设置窗口,如下图所示: 可以手动设置,也可以在与CPU建立在线通讯链接的状态下,点击Read Modules按钮,Internet wizard配置向导能够自动读取联机的
SIMOTION工业以太网通信入门
1.SIMOTION工业以太网网络介质 西门子工业以太网网络通常使用的物理传输介质为屏蔽双绞线(FC TP)、工业屏蔽双绞线(ITP)和光纤。 1.1 屏蔽双绞线(Fast Connection Twist Pair) FC TP快速连接双绞线用于将DTE快速连接到工业以太网上,配合西门子FC TP RJ45接头使用,连接方式如图1所示: 图1:FC TP电缆与TP RJ45接头 将双绞线按照TP RJ45接头标示的颜色插入连接孔中,快捷、方便地将DTE设备连接到工业以太网上。使用FC双绞线从DTE到交换机最长通信距离为100米(DTE到DTE)。也可以使用普通RJ45接头,为了保证数据传输的可靠性,在无干扰情况下最长通信距离为5米。 RJ-45连接有两种连接方式,交叉连接(如图2所示)和直通连接(如图3所示)。交叉连接用于网卡之间的连接或集线器之间的连接;直通线用于网卡与集线器之间或网卡与交换机之间的连接。Siemens交换机由于采用了自适应技术,可以自动检测线序,故通过交换机可以选择任意一种电缆进行连接。 图2 交叉线连接
图3 直通线连接 SIMOTION 带有RJ45接头,建议使用西门子FC TP和FC TP RJ45接头。 1.2 工业屏蔽双绞线(Industrial Twisted Pair) 屏蔽双绞线如图4所示,它有白/蓝和白/橙两对双绞屏蔽线。外部包有屏蔽层和绝缘层,用于连接有ITP 端口的以太网设备。通过ITP电缆连接的两个设备的最远距离为100米。 图4 ITP电缆结构图 连接ITP电缆的连接头有两种,即9 针或15 针的Sub-D 接头,如图所示5、6:
以太网通信设置说明
以太网通信设置说明 一.以太局域的连接及配置 ㈠ 网卡和交换机的连接: A.各个计算机的主网卡连接到第一个交换机上,而另一块网卡连接到第二个交换机上; B.两个交换机之间也要连接; C.网络线RJ45的压接要严格按标准执行。 ㈡ 计算机及网卡的配置: A.各个网卡配置成固定的IP地址(同一网段),速度和工作方式配为10M 或100M/FULL方式; B.各个计算机的主机名不能相同,各个计算机的管理员登录名和密码要相同。 ㈢注意事项: A。各个计算机的计算机名均隶属于工作组{WORKGROUP}; B.各个计算机和交换机的接地线一定要符合标准; C.网络线布置不要和动力线平行走,网线长度应为大于3m和小于100m之间; D.仔仔细细检查网线RJ45的压接。 二.计算机的DCOM配置方法 ㈠ WINDOWS 2000 操作系统 1.在“开始”菜单下运行\WinNT\system32\dcomcnfg.exe
2.默认属性页下配置如图所示 3.、在默认安全机制页的3 个编辑默认值里,均添加Administrators和Everyone 用户,并设定其访问类型分别为“允许访问”、“允许调用”及“完全控制”,如下组图所示:
4.在默认协议中尽可能添加所有协议如下图所示:
5.然后在应用程序页选中“FB 2000NS.DA&AEServer.2”点击属性其 “常规”内配置如下图所示: 6.“FB 2000NS.DA&AEServer.2”属性页其“位置”内配置如下图所示: 7.“FB 2000NS.DA&AEServer.2”属性页其“安全性”内配置如下图所示: 访问权限和启动权限均设为默认,配置权限自定义配置如下图: