计算机数据库课后作业答案
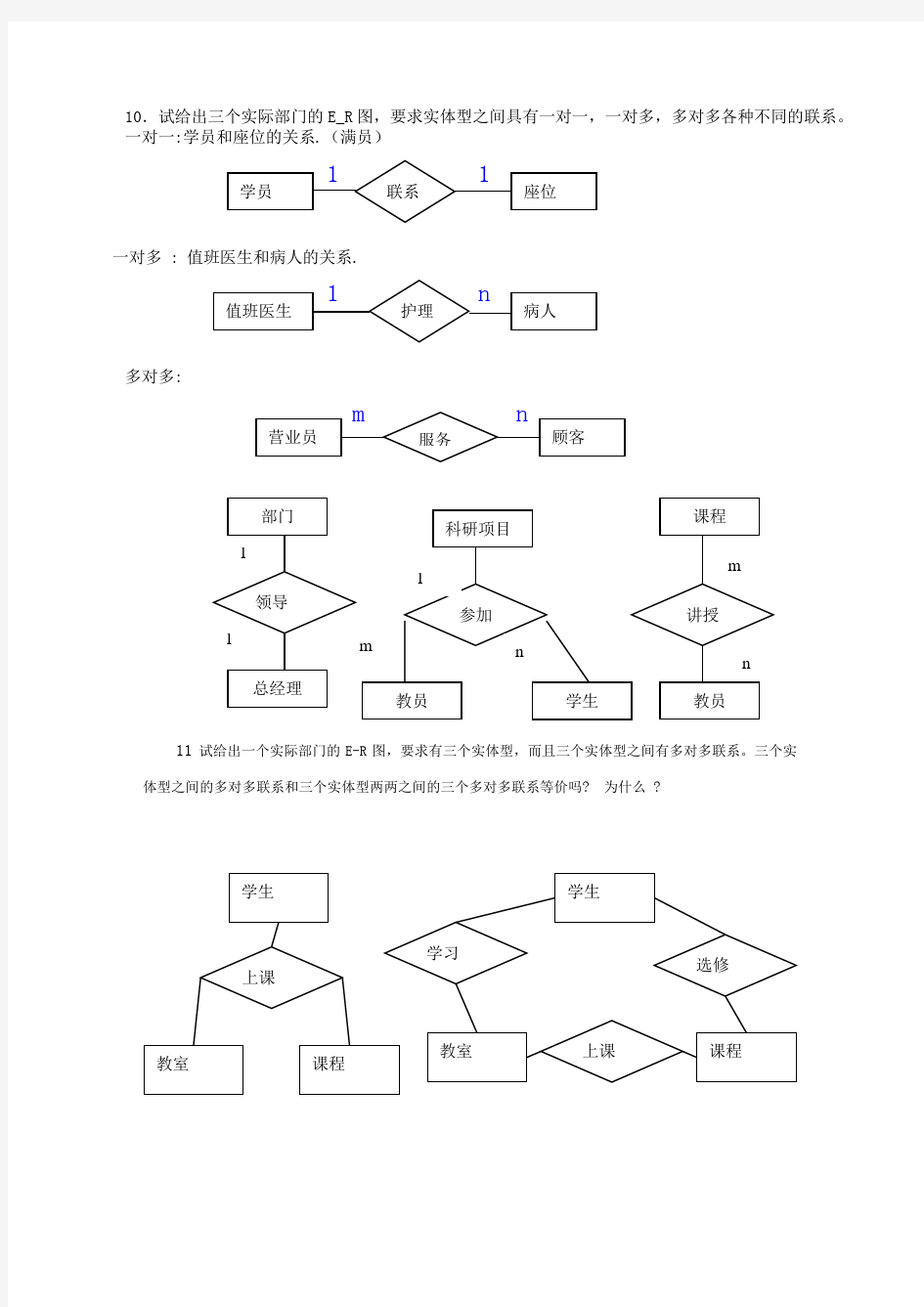
10.试给出三个实际部门的E_R 图,要求实体型之间具有一对一,一对多,多对多各种不同的联系。 一对一:学员和座位的关系.(满员)
一对多 : 值班医生和病人的关系
.
多对多:
11试给出一个实际部门的E-R 图,要求有三个实体型,而且三个实体型之间有多对多联系。三个实
体型之间的多对多联系和三个实体型两两之间的三个多对多联系等价吗? 为什么 ?
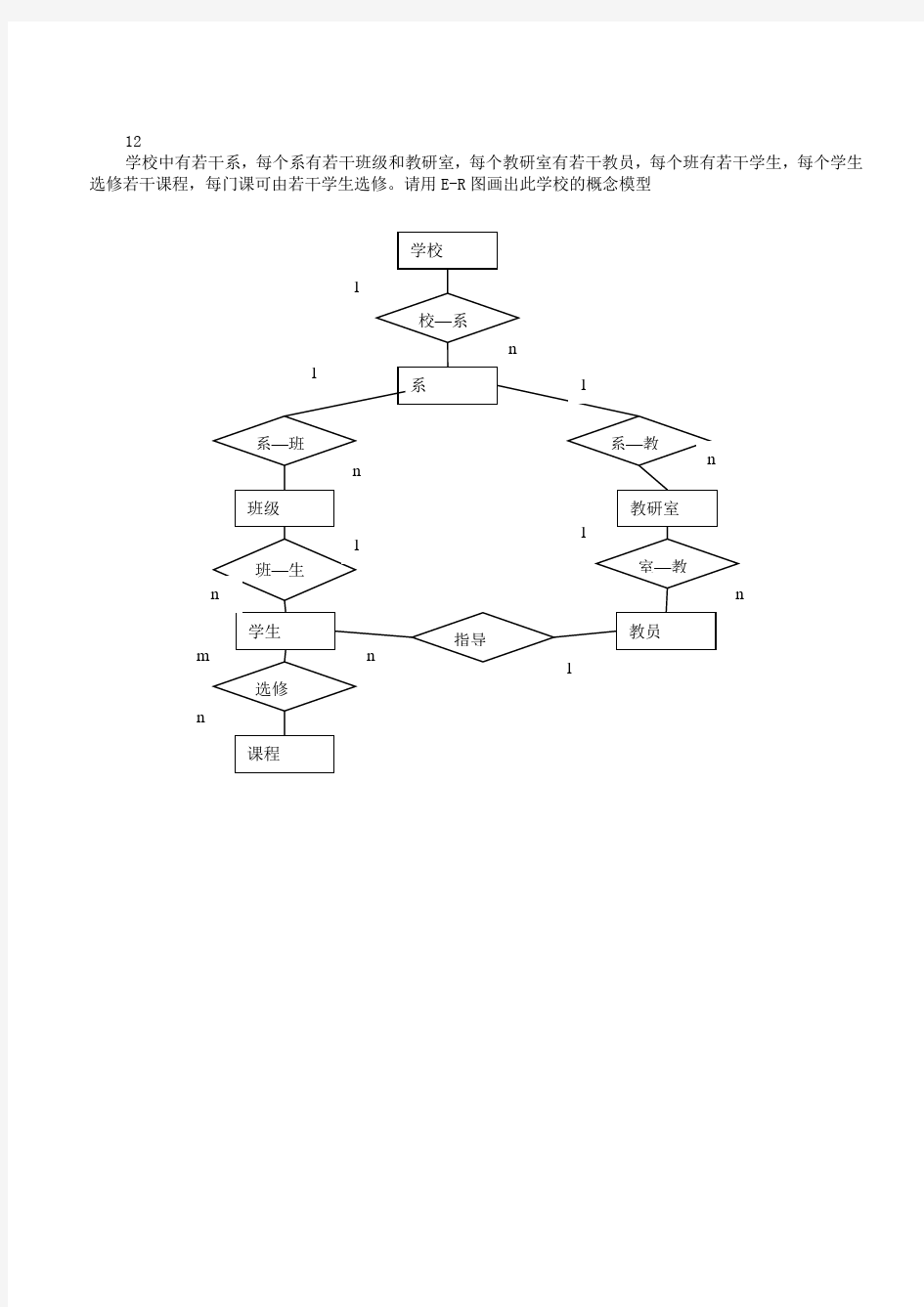
12
学校中有若干系,每个系有若干班级和教研室,每个教研室有若干教员,每个班有若干学生,每个学生选修若干课程,每门课可由若干学生选修。请用E-R图画出此学校的概念模型
13某工厂生产若干产品,每种产品由不同的零件组成,有的零件可用在不同的产品上。这些零件由不同的原材料制成,不同零件所用的材料可以相同。这些零件按所属的不同产品分别放在仓库中,原材料按照类别放在若干仓库中。请用E-R图画山此工厂产品,零件,材料,仓库的概念模型。
第二章 作业P74
第5题 1、()()SPJ J JNO SNO '1'=σπ
2、
()()SPJ P PNO J JNO SNO '1''1'=∧=σπ
3、()()()()()p '''1',红==∞CO LO R PNO J JNO PNO
SNO SNO SPJ σπσπ
π
4、
()()()()()()()p SPJ S CO LO R PNO JNO PNO SNO '',,''CITY SN O JN O JN O J 红天津==∞∞-σππσπππ
5、()()()S PJ S PJ 'S1'SN O PN O PN O JN O ,=÷σππ
第7题
交运算 )(S R R S R --=? 连接运算
)(S R S R B A ?=∞θσ
除运算()()()()R S R R Y X S Y X R Y X X X -?-=÷ππππ),(),(
第三章 P127
第4题
1求供应工程J1零件的供应商号码SNO:
SELECT SNO FROM SPJ
WHERE JNO=’J1’
2求供应工程J1零件P1的供应商号码SNO:
SELECT SNO FROM SPJ
WHERE JNO=’J1’ AND PNO=’P1’
3求供应工程J1零件为红色的供应商号码SNO:
SELECT SNO FROM SPJ
WHERE JNO=’J1’ AND PNO IN ( SELECT PNO
FROM P
WHERE COLOR=’红’);
或者
SELECT SNO
FROM SPJ,P
WHERE JNO=’J1’
AND SPJ.PNO=P.PNO AND COLOR =’红’;
4求没有使用天津供应商生产的红色零件的工程号JNO:
SELECT JNO
FROM J
WHERE NOT EXISTS
(SELECT *
FROM SPJ
WHERE SPJ.JNO=J.JNO
AND SNO IN
(SELECT SNO
FROM S
WHERE CITY=’天津’)
AND PNO IN
(SELECT PNO
FROM P
WHERE COLOR=‘红’));
或者
SELECT JNO
FROM J
WHERE NOT EXISTS
(SELECT *
FROM SPJ,S,P
WHERE SPJ.JNO=J.JNO AND SPJ.SNO=S.SNO
AND SPJ.PNO=P.PNO AND S.CITY=’天津’
AND P.COLOR=’红’);
5求至少用了供应商S1所供应的全部零件的工程号JNO。
SELECT DISTINCT JNO
FROM SPJ SPJZ
WHERE NOT EXISTS
(SELECT *
FROM SPJ SPJX
WHERE SNO=’S1’
AND NOT EXISTS
(SELECT *
FROM SPJ SPJY
WHERE SPJY.PNO=SPJX.PNO
AND SPJY.JNO=SPYZ.JNO));
第五题
1 找出所有供应商的姓名和所在城市。
SELECT SNAME,CITY
FROM S;
2找出所有零件的名称、颜色、重量。
SELECT PANME,COLOR,WEIGHT
FROM P;
3找出使用供应商S1所供应零件的工程号码。
SELECT JNO
FROM SPJ
WHERE SNO=’S1’;
4找出工程项目J2使用的各种零件的名称及其数量SELECT P.PNAME ,SPJ.QTY
FROM P,SPJ
WHERE P.PNO=SPJ.PNO
AND SPJ.JNO=’J2’;
5找出上海厂商供应的所有零件号码。
SELECT DISTINCT PNO
FROM SPJ
WHERE SNO IN
(SELECT SNO
FROM S
WHERE CITY=’上海‘)
6出使用上海产的零件的工程名称。
SELECT JNAME
FROM J,SPJ,S
WHERE J.JNO=SPJ.JNO
AND SPJ.SNO=S.SNO
AND S.CITY=’上海’);
或者
SELECT JNAME
FROM J
WHERE JNO IN
(SELECT JNO
FROM SPJ,S
WHERE SPJ.SNO=S.SNO
AND S.CITY=’上海’);
7找出没有使用天津产的零件的工程号码。
SELECT JNO
FROM J
WHERE NOT EXISTS
(SELECT *
FROM SPJ
WHERE SPJ.JNO=J.JNO
AND SNO IN
(SELECT SNO
FROM S
WHERE CITY=’天津’));
或者
SELECT JNO
FROM J
WHERE NOT EXISTS
(SELECT *
FROM SPJ,S
WHERE SPJ.JNO =J.JNO
AND SPJ.SNO=S.SNO
AND S.CITY=’天津’);
8把全部红色零件的颜色改成蓝色。
UPDATE P
SET COLOR=”蓝“
WHERE COLOR=“红”
9由S5供给J4的零件P6改为由S3供应。UPDATE SPJ
SET SNO=’S3’
WHERE SNO=’S5’
AND JNO=’J4’
AND PNO=’P6’
10从供应商关系中删除供应商号是S2的记录,并从供应情况关系中删除相应的记录。DELETE
FROM SPJ
WHERE SNO=’S2’
DELETE
FROM S
WHERE SNO=’S2’
11请将(S2,J6,P4,200)插入供应情况关系。
INSERT INTO SPJ(SNO,JNO,PNO,QTY)
V ALUES (S2,J6,P4,200);
或
INSERT INTO SPJ
V AUES(S2,P4,J6,200)
第11 题请为三建工程项目建立一个供应情况的视图,包括供应商代码(SNO)、零件代码(PNO)、供应数量(QTY)。
CREATE VIEW V_SPJ
AS
SELECT SNO,PNO,QTY
FROM SPJ
WHERE JNO=
(SELECT JNO
FROM J
WHERE JANME=’三建’);
第四章(P148)
8
(a)
GRANT SELECT ON TABLE 职工,部门
TO 王明;
(b)
GRANT INSERT,DELECT ON TABLE 职工,部门
TO 李勇;
(c)
GRANT SELECT ON TABLE 职工
WHERE USER()=NAME
TO ALL;
(d)
GRANT SELECT,UPDATE(工资) ON TABLE 职工
TO 刘星;
(e)
GRANT ALTER ON TABLE职工,部门
TO 张新;
(f)
GRANT ALL PRIVILIGES ON TABLE 职工,部门
TO 周平
WITH GRANT OPTION;
(g)
CREATE VIEW 部门工资AS
SELECT 部门.名称,MAX(工资),MIN(工资),A VG(工资)
FROM 职工,部门
WHERE 职工.部门号=部门.部门号
GROUP BY职工.部门号
GRANT SELECT ON部门工资
TO 杨兰
第六章(P195)
第二题
关系模式:
学生S(S#,SN,SB,DN,C#,SA)
班级C(C#,CS,DN,CNUM,CDA TE)
系D( D#,DN,DA,DNUM)
学会P(PN,DA TE1,PA,PNUM)
学生—学会SP(S#,PN,DATE2)
其中:S#----学号,SN—姓名,SB—出生年月,SA—宿舍区
C#---班号,CS—专业名,CNUM—班级人数,CDATE—入校年份
D#--系号,DN—系名,DA—系办公室地点,DNUM—系人数
PN—学会名,DATE1—成立年月,PA—地点,PNUM—学会人数,DA TE2—入会年份;
每个关系的最小依赖集:
S:S#→SN,S#→SB,S#→C#,C#→DN,DN→SA
C:C#→CS,C#→CNUM,C#→CDATE,CS→DN,(CS,CDATE)→C# /* 假设每个专业每年只招一个班*/
D:D#→DN,DN→D#,D#→DA,D#→DNUM /*系名与系号一一对应 */
P:PN→DATE1,PN→PA,PN→PNUM,
SP:(S#,PN)→DATE2
S中存在传递函数依赖:S#→DN,S#→SA,C#→SA
/*因为 S#→C#,C#→DN,DN→SA */
C中存在传递函数依赖:C#→DN
/*因为C#→CS,CS→DN */
(S#,PN)→DATE2 和(CS,CDATE)→C# 均为SP中的函数依赖,是完全函数依赖。
第五题
多值依赖举例:
1关系模式MSC(M,S,C),M表示专业,S表示学生,C表示该专业的必修课
2 关系模式ISA(I,S,A),I表示学生兴趣小组,S表示学生,A表示某兴趣小组的活动项目。
3 关系模式RDP(R,D,P),R表示医院的病房,D表示责任医务人员,P表示病人。
第七章p234
11 什么是数据库的逻辑结构设计?试述其设计步骤?
18 p234
关系模式
作者(作者号,姓名,年龄,性别,电话,地址)
出版社(出版社号,名称,地址,联系电话)
出版(作者号,出版社号,书的数量)
出版关系的主码作者号,出版社号,分别参照作者关系的主码作者号,和出版社关系的主码出版社号。
19
关系模型:
读者(读者号,姓名,地址,性别,年龄,单位)
书(书号,书名,作者,出版社)
借书(读者号,书号,借出日期,应还日期)
第九章
2
人工智能(部分习题答案)
1.什么是人类智能?它有哪些特征或特点? 定义:人类所具有的智力和行为能力。 特点:主要体现为感知能力、记忆与思维能力、归纳与演绎能力、学习能力以及行为能力。 2.人工智能是何时、何地、怎样诞生的? 解:人工智能于1956年夏季在美国Dartmouth大学诞生。此时此地举办的关于用机器模拟人类智能问题的研讨会,第一次使用“人工智能”这一术语,标志着人工智能学科的诞生。 3.什么是人工智能?它的研究目标是? 定义:用机器模拟人类智能。 研究目标:用计算机模仿人脑思维活动,解决复杂问题;从实用的观点来看,以知识为对象,研究知识的获取、知识的表示方法和知识的使用。 4.人工智能的发展经历了哪几个阶段? 解:第一阶段:孕育期(1956年以前);第二阶段:人工智能基础技术的研究和形成(1956~1970年);第三阶段:发展和实用化阶段(1971~1980年);第四阶段:知识工程和专家系统(1980年至今)。 5.人工智能研究的基本内容有哪些? 解:知识的获取、表示和使用。 6.人工智能有哪些主要研究领域? 解:问题求解、专家系统、机器学习、模式识别、自动定论证明、自动程序设计、自然语言理解、机器人学、人工神经网络和智能检索等。 7.人工智能有哪几个主要学派?各自的特点是什么? 主要学派:符号主义和联结主义。 特点:符号主义认为人类智能的基本单元是符号,认识过程就是符号表示下的符号计算,从而思维就是符号计算;联结主义认为人类智能的基本单元是神经元,认识过程是由神经元构成的网络的信息传递,这种传递是并行分布进行的。 8.人工智能的近期发展趋势有哪些? 解:专家系统、机器人学、人工神经网络和智能检索。 9.什么是以符号处理为核心的方法?它有什么特征? 解:通过符号处理来模拟人类求解问题的心理过程。 特征:基于数学逻辑对知识进行表示和推理。 11.什么是以网络连接为主的连接机制方法?它有什么特征? 解:用硬件模拟人类神经网络,实现人类智能在机器上的模拟。 特征:研究神经网络。 1.请写出用一阶谓词逻辑表示法表示知识的步骤。 步骤:(1)定义谓词及个体,确定每个谓词及个体的确切含义;(2)根据所要表达的事物或概念,为每个谓词中的变元赋予特定的值;(3)根据所要表达的知识的语义用适当的联接符号将各个谓词联接起来,形成谓词公式。 2.设有下列语句,请用相应的谓词公式把它们表示出来: (1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。 解:定义谓词如下: Like(x,y):x喜欢y。 Club(x):x是梅花。 Human(x):x是人。 Mum(x):x是菊花。 “有的人喜欢梅花”可表达为:(?x)(Human(x)∧Like(x,Club(x))) “有的人喜欢菊花”可表达为:(?x)(Human(x)∧Like(x,Mum(x))) “有的人既喜欢梅花又喜欢菊花”可表达为:(?x)(Human(x)∧Like(x,Club(x))∧ Like(x,Mum(x))) (1)他每天下午都去玩足球。 解:定义谓词如下: PlayFootball(x):x玩足球。 Day(x):x是某一天。 则语句可表达为:(?x)(D(x)→PlayFootball(Ta)) (2)太原市的夏天既干燥又炎热。 解:定义谓词如下: Summer(x):x的夏天。 Dry(x):x是干燥的。 Hot(x):x是炎热的。 则语句可表达为:Dry(Summer(Taiyuan))∧Hot(Summer(Taiyuan)) (3)所有人都有饭吃。 解:定义谓词如下: Human(x):x是人。 Eat(x):x有饭吃。 则语句可表达为:(?x)(Human(x)→Eat(x)) (4)喜欢玩篮球的人必喜欢玩排球。 解:定义谓词如下: Like(x,y):x喜欢y。 Human(x):x是人。
通信原理课后答案3
9.9 采用13折线A律编码,设最小量化间隔为1个单位,已知抽样脉冲值为+635单位: (1)试求此时编码器输出码组,并计算量化误差; (2)写出对应于该7位码(不包括极性码)的均匀量化11位码。(采用自然二进制码) 解(1)已知抽样脉冲值 它位于第7段序号为3的量化级,因此输出码组为 量化误差为635-(512+3*32)=27 (2) 对应的11位均匀量化码为010******** 9-10采用13折线A律编码电路,设接收端收到的码组为“01010011”最小量化间隔为1个量化单位,并已知段内码改用折叠二进码: (l) 试问译码器输出为多少量化单位; (2) 试写出对应于该.7位码(不包括极性码)的均匀量化11位码。 解(1)接收端收到的码组 由C1=0知,信号为负值;由段落码知,信号样值位于第6段,起点电平为256,量化间隔为16;由段内码码器输出为C5C6C7C8 =0011 采用折叠码) C5C6C7C8 =0011 采用折叠码,对应自然二进制码为0100 可知,信号样值位于第6段的第5级(序号为4),故译码器输出为 256416162328 (/) I=-+?+=- (2)均匀量化11位码为00101001000 9.11采用13折线A律编码,设最小的量化间隔为1个量化单位,已知抽样脉冲值为-95量化单位: (1)试求此时编码器输出码组,并计算量化误差; (2)试写出对应于该7位码(不包括极性码)的均匀量化11位码。 解(1)因为样值为负值.所以极性码
又因64 (26)< 95 < 128,所以码组位于第四段,段落码为 量化间隔为4。由于95=64 +7 *4 +3,所以段内码为 故编码器输出为 量化误差为3个单位。 (2)对应的均匀量化11位码为(92=64 +7 *4) 9.13 对10路带宽均为300Hz-3400Hz的模拟信号进行PCM时分复用传输。设抽样速率为8000Hz,抽样后进行8级量化,并编为自然二进制码,码元波形是宽度为 的矩形脉冲,且占空比为1。试求传输此时分复用PCM信号所需的奈奎斯特基带带宽。 解由抽样频率s f= 8kHz,可知抽样间隔 对10路信号进行时分复用,每路占用时间为 又对抽样信号8级量化,故需要3位二进制码编码,每位码元占用时间为 因为占空比为1,所以每位码元的矩形脉冲宽度 故传输此时分复用PCM信号所需的奈奎斯特基带带宽为
机械设计基础课后习题答案
精品 机械设计基础课后习题解答参考 1-2题 ,7,5===h l P P n 107253=-?-?=F 机构有1个主动构件,所以机构有确定运动。 1-3题 1,11, 8===h l P P n 1111283=-?-?=F 机构有1个主动构件,所以机构有确定运动。 1-4题 0,11, 8===h l P P n 2011283=-?-?=F 机构有2个主动构件,所以机构有确定运动。 1-5题 1,8, 6===h l P P n 118263=-?-?=F 机构有1个主动构件,所以机构有确定运动。 2-1题 (a )双曲柄机构; (b )曲柄摇杆机构; (c )双摇杆机构; (d )双摇杆机构。 2-2题 0≠e 时,曲柄条件:e l l BC AB -<; 0=e 时, 曲柄条件:BC AB l l <。 2-4题
精品 极位夹角 ?=+-??=+-?=3636.161 2.11 2.118011180K K θ
精品 2-7题 极位夹角?=+-??=+-? =361 5.11 5.118011180K K θ 3-2题
精品 4-1题 m z m h z d a a )2()2(* +=+= 所以 25.2100 225 2== +=z d m a mm 主要几何尺寸计算(略)。 4-2题略 4-3题 分锥角 "43'25684287.6817 43arctan arctan 122?=?===z z δ "17'34215713.2190221?=?=-?=-∑=δδδ 分度圆 5117311=?==mz d mm ; 12943322=?==mz d mm 齿顶圆 580.565713.21cos 3251cos 2111=???+=+=δm d d a mm 206.1314287.68cos 32129cos 2222=???+=+=δm d d a mm 齿根圆 304 .445713.21cos 34.251cos 4.2111=???-=-=δm d d f mm 353.1264287.68cos 34.2129cos 4.2222=???-=-=δm d d f mm 锥距 358.6943172 32222 221=+?=+= z z m R mm 齿顶角 "44'4237122.3358.693 arctan arctan ?=?===R h a a θ 齿根角 " 7'2744519.4358 .696 .3arctan arctan ?=?===R h f f θ
人工智能习题&答案-第8章-机器人规划
第八章机器人规划 8-1 有哪几种重要的机器人高层规划系统?它们各有什么特点?你认为哪种规划方法有较大的发展前景? 基于谓词逻辑的规划是用谓词逻辑来描述世界模型及规划过程的一种规划方法 (1) 规划演绎法。用F规则求解规划序列。 (2) 逻辑演算和通用搜索法。STRIPS和ABSTRIPS系统。 (3) 具有学习能力的规划系统。如PULP-I系统 (4) 分层规划方法。如NOAH规划系统,它特别适用于非线性规划 (5) 基于专家系统的规划。如ROPES规划系统,它具有更快的规划速度,更强的规划能力和更大的适应性。 发展前景? 8-2 让right(x),left(x),up(x)和down(x)分别表示八数码难题中单元x左边、右边、上面和下面的单元(如果这样的单元存在的话)。试写出STIPS规划来模拟向上移动B(空格)、向下移动B、向左移动B和向右移动B等动作。 8-3 考虑设计一个清扫厨房规划问题。 (1) 写出一套可能要用的STRIPS型操作符。当你描述这些操作符时,要考虑到下列情况: ·清扫火炉或电冰箱会弄脏地板。 ·要清扫烘箱,必须应用烘箱清洗器,然后搬走此清洗器。 ·在清扫地板之前,必须先行打扫。 ·在打扫地板之前,必须先把垃圾筒拿出去。 ·清扫电冰箱造成垃圾污物,并把工作台弄脏。 ·清洗工作台或地板使洗涤盘弄脏。 (2) 写出一个被清扫厨房的可能初始状态描述,并写出一个可描述的(但很可能难以得
到的)目标描述。 (3) 说明如何把STRIPS规划技术用来求解这个问题。(提示:你可能想修正添加条件的定义,以便当某个条件添加至数据库时,如果出现它的否定的话,就能自动删去此否定)。 8-4 曲颈瓶F1和F2的容积分别为C1和C2。公式CONT(X,Y)表示瓶子X含有Y容量单位的液体。试写出STRIPS规划来模拟下列动作: (1) 把F1内的全部液体倒进F2内。 (2) 用F1的部分液体把F2装满。 8-5 机器人Rover正在房外,想进入房内,但不能开门让自已进去,而只能喊叫,让叫声促使开门。另一机器人Max在房间内,他能够开门并喜欢平静。Max通常可以把门打开来使Rover停止叫喊。假设Max和Rover各有一个STRIPS规划生成系统和规划执行系统。试说明Max和Rover的STRIPS规则和动作,并描述导致平衡状态的规划序列和执行步骤。 用来描述状态的谓词公式有: INROOM(X): X在房间里 OUTROOM(X): X不在房间里 SOUND(X): X在喊叫 QUIET(X): X保持安静 OPENED(X): X处于打开状态 CLOSED(X): X处于关闭状态 Rover可执行的动作有: Shout(X): X喊叫 先决条件:OUTROOM(X) AND CLOSED(Door) AND QUIET(X) 删除表:QUIET(X) 添加表:SOUND(X) ComeIn(X): X走进房间
通信原理课后答案1
习题解答(一) 1-4 一个由字母A ,B ,C ,D 组成的字。对于传输的每一个字母用二进制脉冲编码,00代替A ,01代替B ,10代替C ,11代替D ,每个脉冲宽度为5ms 。 (1) 不同的字母是等可能出现时,试计算传输的平均信息速率; (2) 若每个字母出现的可能性分别为 P A =1/5,P B =1/4,P C =1/4,P D =3/10 试计算传输的平均信息速率。 )/(5.19810 10985 .1) /(985.110 3log 10341log 4141log 4151log 51)] ()[log ()(2)/(20010102 /10/52)/(24log log ) (1 log )1(3 2222123 222 s bit t I R bit x P x P x H s bit t I R m s m s t bit M x P I b n i i i b =?≈?=≈----=-==?=?==?=?====-=-∑则:符号)(则:符号) (符号)(间为:传输每个符号占用的时符号解: 1-5 国际莫尔斯电码用点和划的序列发送英文字母,划用 持续3单位的电流脉冲表示,点用持续1单位的电流脉冲表示;且划出现的概率是点出现概率的1/3: (1) 计算点和划的信息量; (2) 计算点和划的平均信息量。
符号) ) (故 。划出现的概率为, ,所以点出现的概率为出现概率的因为划出现的概率是点解:/(81.024 1 415.0432) (241 log log ) (415.043 log log 4/14/33/1)1(22112222212121bit I P I P H bit P I bit P I P P =?+?=+==-=-=≈-=-=== 1-6 设一信息源的输出由128个不同的字符组成。其中16个出现的概率为1/32,其余112个出现的概率为1/224。信息源每秒发出1000个符号,且每个符号彼此独立。试计算该信息源的平均信息速率。 1-9 如果二进制独立等概信号,码元宽度为0.5ms ,求R B 和R b ;有四进制信号,码元宽度为0.5ms ,求传码率R B 和独立等概时的传信率R b 。
机械设计基础课后习题答案全
7-1解:(1)先求解该图功的比例尺。 (2 )求最大盈亏功。根据图7.5做能量指示图。将和曲线的交点标注, ,,,,,,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-” 号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做 ,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭 矢量。由图知该机械系统在区间出现最大盈亏功,其绝对值为: (3 )求飞轮的转动惯量 曲轴的平均角速度:; 系统的运转不均匀系数:; 则飞轮的转动惯量:
图7.5图7.6 7-2 图7.7 图7.8 解:(1)驱动力矩。因为给定为常数,因此为一水平直线。在一个运动循环中,驱
动力矩所作的功为,它相当于一个运动循环所作的功,即: 因此求得: (2)求最大盈亏功。根据图7.7做能量指示图。将和曲线的交点标注, ,,。将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏 功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功; 其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。 由图知该机械系统在区间出现最大盈亏功。 欲求,先求图7.7中的长度。如图将图中线1和线2延长交于点,那么在中, 相当于该三角形的中位线,可知。又在中,,因此有: ,则
根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则 。 (3)求飞轮的转动惯量和质量。 7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮 安装在电动机轴上,飞轮的转动惯量为: 7-4解:(1)求安装在主轴上飞轮的转动惯量。先求最大盈亏功。因为是最大动能与最小 动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此: 则飞轮的转动惯量: (2)求飞轮的最大转速和最小转速。
通信原理课后作业答案(最新整理)
第一次作业────第二章 2.1消息源以概率发送5种消息 16/1,16/1,8/1,4/1,2/154321=====P P P P P 符号。若每个消息符号出现是独立的,求每个消息符号的54321,,,,m m m m m 信息量。 解:bit P m P m I 1log )(log )(12121=-=-=bit P m P m I 2log )(log )(22222=-=-=bit P m P m I 3log )(log )(32323=-=-=bit P m P m I 4log )(log )(42424=-=-=bit P m P m I 4log )(log )(52525=-=-=2.3一个离散信号源每毫秒发出4种符号中的一个,各相互独立符号出现的概率 分别为。求该信号源的平均信息量与信息速率。 1.0, 2.0, 3.0, 4.0解: nit/s 85.1279)(R nit,1.27985)(: ,(tet)/s 83.555)(R (tet),0.55583)(: ,10bit/s 44.1846)(R bit,1.84644)(: ,2) 1.0log 1.0 2.0log 2.0 3.0log 3.0 4.0log 4.0() (log )()(1=========+++-=-=∑=t X H X H e t X H X H t X H X H x p x p X H N i i i 分别为平均信息量与信息速率为底时以哈哈分别为平均信息量与信息速率为底时以分别为平均信息量与信息速率为底时以2.6已知非对称二进制信道,输入符号的概率为 =???? ??2211,,P x P x ???? ? ??431,41,0信道转移概率矩阵
人工智能原理及其应用第3版-课后习题答案
第1章人工智能概述课后题答案 1.1什么是智能?智能包含哪几种能力? 解:智能主要是指人类的自然智能。一般认为,智能是是一种认识客观事物和运用知识解决问题的综合能力。 智能包含感知能力,记忆与思维能力,学习和自适应能力,行为能力 1.2人类有哪几种思维方式?各有什么特点? 解:人类思维方式有形象思维、抽象思维和灵感思维 形象思维也称直感思维,是一种基于形象概念,根据感性形象认识材料,对客观对象进行处理的一种思维方式。 抽象思维也称逻辑思维,是一种基于抽象概念,根据逻辑规则对信息或知识进行处理的理性思维形式。 灵感思维也称顿悟思维,是一种显意识与潜意识相互作用的思维方式。 1.3什么是人工智能?它的研究目标是什么? 解:从能力的角度讲,人工智能是指用人工的方法在机器(计算机)上实现智能;从学科的角度看,人工智能是一门研究如何构造智能机器或智能系统,使它能模拟、延伸和扩展人类智能的学科。 研究目标: 对智能行为有效解释的理论分析; 解释人类智能; 构造具有智能的人工产品; 1.4什么是图灵实验?图灵实验说明了什么? 解:图灵实验可描述如下,该实验的参加者由一位测试主持人和两个被测试对象组成。其中,两个被测试对象中一个是人,另一个是机器。测试规则为:测试主持人和每个被测试对象分别位于彼此不能看见的房间中,相互之间只能通过计算机终端进行会话。测试开始后,由测试主持人向被测试对象提出各种具有智能性的问题,但不能询问测试者的物理特征。被测试对象在回答问题时,都应尽量使测试者相信自己是“人”,而另一位是”机器”。在这个前提下,要求测试主持人区分这两个被测试对象中哪个是人,哪个是机器。如果无论如何更换测试主持人和被测试对象的人,测试主持人总能分辨出人和机器的概率都小于50%,则认为该机器具有了智能。 1.5人工智能的发展经历了哪几个阶段? 解:孕育期,形成期,知识应用期,从学派分立走向综合,智能科学技术学科的兴起
通信原理(陈启兴版)第1章课后习题答案
第1章引言 1.1 学习指导 1.1.1 要点 本章的要点有通信系统的数学模型,通信系统的分类及通信方式,信息及其度量,通信系统的主要性能指标。 1.通信系统的数学模型 通信系统是指传递消息所需的一切技术设备(含信道)的总和。通信系统的作用就是将信息从信源发送到一个或多个目的地。 (1)一般模型 以图1-1所示的功能框图来表示。 图1-1通信系统的一般模型 信息源。信源所产生的信息可以是声音、图像或文本。信息源一般包含变换器,将信源的输出变换成电信号。例如,用作变换器的话筒,可以将语音信号变换成电信号,而摄像机则将图像信号变换成电信号。这些设备输出的信号一般称为基带信号。在接收端,使用类似的变换器就可以将接收到的电信号变换成适合用户的形式,如声音信号、图像等。 发送设备。发送设备将原始基带电信号变换成适合物理信道或其他传输介质传输的形式。例如在无线电和电视广播中,通信部门规定了各发射台的频率范围,因此,发射机必须将待发送的信息信号转换到适合的频率范围来发送,以便与分配给此发射机的频率相匹配。这样,由多个无线电台发送的信号就不会彼此干扰。又如果信道是光纤组成的,那么发送设备就要将处理好的基带信号转换光波信号再发送。因此发送设备涵盖的内容很多,可能包含变换、放大、滤波、编码调制等过程。对于多路传输系统,发送设备中还包括多路复用器。 信道。信道用于将来自发送设备的信号发送到接收端的物理介质。信道可以分为两大类:无线信道和有线信道。在无线信道中,信道可以是大气、自由空间和海水。有线信道有双绞电话线、同轴电缆及光纤等。信道对不同种类的信号有不同的传输特性,但都会对在信道中传输的信号产生衰减,信道中的噪声和由不理想接收机引入的噪声会引起接收信号的失真 接收设备。接收设备的功能是恢复接收信号中所包含的消息信号。使用和发送端相
新版《机械设计基础》课后习题参考答案
机械设计基础习题参考答案 机械设计基础课程组编 武汉科技大学机械自动化学院
第2章 平面机构的自由度和速度分析 2-1画运动简图。 2-2 图2-38所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。 4 3 5 1 2 解答:原机构自由度F=3?3- 2 ?4-1 = 0,不合理 ,
2-3 试计算图2-42所示凸轮—连杆组合机构的自由度。 b) a) A E M D F E L K J I F B C C D B A 解答:a) n=7; P l=9; P h=2,F=3?7-2 ?9-2 =1 L处存在局部自由度,D处存在虚约束 b) n=5; P l=6; P h=2,F=3?5-2 ?6-2 =1 E、B处存在局部自由度,F、C处存在虚约束2-4 试计算图2-43所示齿轮—连杆组合机构的自由度。 B D C A (a) C D B A (b) 解答:a) n=4; P l=5; P h=1,F=3?4-2 ?5-1=1 A处存在复合铰链 b) n=6; P l=7; P h=3,F=3?6-2 ?7-3=1 B、C、D处存在复合铰链 2-5 先计算如图所示平面机构的自由度。并指出图中的复合铰链、局部自由度和虚约束。
A B C D E 解答: a) n=7; P l =10; P h =0,F=3?7-2 ?10 = 1 C 处存在复合铰链。 b) n=7; P l =10; P h =0,F=3?7-2 ?10 = 1 B D E C A c) n=3; P l =3; P h =2,F=3?3 -2 ?3-2 = 1 D 处存在局部自由度。 d) n=4; P l =5; P h =1,F=3?4 -2 ?5-1 = 1 A B C D E F G G' H A B D C E F G H I J e) n=6; P l =8; P h =1,F=3?6 -2 ?8-1 = 1 B 处存在局部自由度,G 、G'处存在虚约束。 f) n=9; P l =12; P h =2,F=3?9 -2 ?12-2 = 1 C 处存在局部自由度,I 处存在复合铰链。
《通信原理》樊昌信 课后习题答案
习题解答 《通信原理教程》樊昌信 第一章 概论 1.3 某个信息源由A 、B 、C 、D 等4个符号组成。这些符号分别用二进制码组00、01、10、11表示。若每个二进制码元用宽度为5ms 的脉冲传输,试分别求出在下列条件下的平均信息速率。 (1) 这4个符号等概率出现; (2) 这4个符号出现的概率分别为1/4、1/4、3/16、5/16。 解: 每秒可传输的二进制位为: () 20010513=?÷- 每个符号需要2位二进制,故每秒可传输的符号数为: 1002200=÷ (1) 4个符号等概率出现时每个符号包含的平均信息量为: bit 24log 2= 故平均信息速率为: s b R b /2002100=?= (2)每个符号包含的平均信息量为: bit 977.11651log 1651631log 163411log 41411log 412222=+++ 故平均信息速率为: s b R b /7.197977.1100=?= 1.6 设一个信号源输出四进制等概率信号,其码元宽度为125s μ。试求码元速率和信 息速率。 解:码元速率为: () baud R B 80001012516=?÷=- 信息速率为: s kb R R B b /16280004log 2=?== 第二章 信号 2.2 设一个随机过程X (t )可以表示成: ()() ∞<<∞-+=t t t X θπ2cos 2 其中θ在(0,2π)之间服从均匀分布,判断它是功率信号还是能量信号?并求出其功率谱密度或能量谱密度。 解:它的能量无限,功率有界,所以是一个功率信号。 ` ()[]()[]()()() πτθ πτθππτπθπ θπτ πθπππ 2cos 4224cos 2cos 2 2122cos 22cos 220 20 =+++= ? +++=? ?d t d t t 由维纳-辛钦关系有:
人工智能习题答案
(此文档为Word格式,下载后可以任意编辑修改!)试卷装订封面
第一章绪论 1-1. 什么是人工智能?试从学科和能力两方面加以说明。 从学科角度来看:人工智能是计算机科学中涉及研究、设计和应用智能机器的一个分支。它的近期主要目标在于研究用机器来模仿和执行人脑的某些智能功能,并开发相关理论和技术。 从能力角度来看:人工智能是智能机器所执行的通常与人类智能有关的功能,如判断、推理、证明、识别、感知、理解、设计、思考、规划、学习和问题求解等思维活动 1-2. 在人工智能的发展过程中,有哪些思想和思潮起了重要作用?控制论之父维纳1940 年主张计算机五原则。他开始考虑计算机如何能像大脑一样工作。系统地创建了控制论,根据这一理论,一个机械系统完全能进行运算和记忆。 帕梅拉?麦考达克(Pamela McCorduck)在她的著名的人工智能历史研究《机器思维》(Machine Who Think,1979) 中曾经指出:在复杂的机械装置与智能之间存在着长期的联系。著名的英国科学家图灵被称为人工智能之父,图灵不仅创造了一个简单的通用的非数字计算 模型,而且直接证明了计算机可能以某种被理解为智能的方法工作。提出了著名的图灵测试。数理逻辑从19 世纪末起就获迅速发展;到20 世纪30 年代开始用于描述智能行为。计算机出现后,又在计算机上实现了逻辑演绎系统。 1943年由生理学家麦卡洛克(McCulloch)和数理逻辑学家皮茨(Pitts)创立的脑模型,即MP模型。60-70年代,联结主义,尤其是对以感知机(perceptron)为代表的脑模型的研究曾出现过 热潮, 控制论思想早在40-50 年代就成为时代思潮的重要部分,影响了早期的人工智能工作者。到 60-70 年代,控制论系统的研究取得一定进展,播下智能控制和智能机器人的种子。 1-3. 为什么能够用机器(计算机)模仿人的智能? 物理符号系统的假设:任何一个系统,如果它能够表现出智能,那么它就必定能执行输入符号、输出符号、存储符号、复制符号、建立符号结构、条件性迁移6种功能。反之,任何系 统如果具有这 6 种功能,那么它就能够表现出智能(人类所具有的智能)。 物理符号系统的假设伴随有3个推论。 推论一: 既然人具有智能,那么他(她)就一定是个物理符号系统。 推论二: 既然计算机是一个物理符号系统,它就一定能够表现出智能。 推论三: 既然人是一个物理符号系统,计算机也是一个物理符号系统,那么我们就能够用计 算机来模拟人的活动。 1-4. 现在人工智能有哪些学派?它们的认知观是什么?符号主义(Symbolicism) ,又称为逻辑主义(Logicism) 、心理学派(Psychlogism) 或计算机学派(Computerism) [ 其原理主要为物理符号系统( 即符号操作系统)假设和有限合理性原理。] 认为人的认知基元是符号,而且认知过程即符号操作过
通信原理习题答案
5-10 某线性调制系统的输出信噪比为20dB,输出噪声功率为 9 10W ,由发射机输出端到解调器输 入端之间总的传输损耗为100dB,试求: (1)DSB/SC时的发射机输出功率; (2)SSB/SC时的发射机输出功率。 解:设发射机输出功率为S T ,解调器输入信号功率为Si,则传输损耗K= S T /S i=100(dB). (1)DSB/SC的制度增益G=2,解调器输入信噪比 相干解调时:Ni=4No 因此,解调器输入端的信号功率: 发射机输出功率: (2)SSB/SC制度增益G=1,则 解调器输入端的信号功率 发射机输出功率: 6-1设二进制符号序列为 1 1 0 0 1 0 0 0 1 1 1 0,试以矩形脉冲为例,分别画出相应的单极性码波形、双极性码波形、单极性归零码波形、双极性归零码波形、二进制差分码波形及八电平码波形。 解:各波形如下图所示:
单极性波形 1 1 0 0 1 0 0 0 1 1 1 0 +E 双极性波形 +E -E 单极性归零波形 +E 0 双极性归零波形 +E 0 -E 二进制差分波形 +E 0 +3E +E -E -3E 四电平波形 6-8已知信息代码为 1 0 1 0 0 0 0 0 1 1 0 0 0 0 1 1,求相应的AMI 码及HDB3码,并分别画出它们的波形图。 解: +1 0 -1 0 0 0 -V 0 +1 -1 +B 0 0 +V -1 +1 +1 0 -1 0 0 0 0 0 +1 -1 0 0 0 0 +1 -1 AMI 码 1 0 1 0 0 0 0 0 1 1 0 0 0 0 1 1 HDB 3码 +1 0 -1 信息码 +1 0 -1
人工智能及其应用 习题参考答案 第1章
第一章绪论 1 什么是人工智能?试从学科和能力两方面加以说明。 答:人工智能(学科):人工智能(学科)是计算机科学中涉及研究、设计和应用智能机器的一个分支。其近期的主要目标在于研究用机器来模仿和执行人脑的某些智力功能,并开发相关理论和技术。 人工智能(能力):人工智能(能力)是智能机器所执行的通常与人类智能有关的智能行为,如判断、推理、证明、识别、感知、理解、通信、设计、思考、规划、学习和问题求解等思维活动。 2 为什么能够用机器(计算机)模仿人的智能? 答:物理符号系统假设:任何一个系统,如果它能够表现出智能,那么它就必定能够执行上述 6 种功能。反之,任何系统如果具有这6种功能,那么它就能够表现出智能;这种智能指的是人类所具有的那种智能。 推论:既然人是一个物理符号系统,计算机也是一个物理符号系统,那么就能够用计算 机来模拟人的活动。 因此,计算机可以模拟人类的智能活动过程。 3.现在人工智能有哪些学派?它们的认知观是什么? 答:符号主义,又称为逻辑主义、心理学派或计算机学派。认为人工智能源于数理逻辑。连接主义,又称为仿生学派或生理学派。认为人工智能源于仿生学,特别是人脑模型的研究。
行为主义,又称为进化主义或控制论学派。认为人工智能源于控制论。 4.你认为应从哪些层次对认知行为进行研究? 答:应从下面4个层次对谁知行为进行研究: (1)认知生理学:研究认知行为的生理过程,主要研究人的神经系统(神经元、中枢神经系统和大脑)的活动。 (2)认知心理学:研究认知行为的心理活动,主要研究人的思维策略。 (3)认知信息学:研究人的认知行为在人体内的初级信息处理,主要研究人的认知行为如何通过初级信息自然处理,由生理活动变为心理活动及其逆过程 (4)认知工程学:研究认知行为的信息加工处理,主要研究如何通过以计算机为中心的人工信息处理系统,对人的各种认知行为(如知觉、思维、记忆、语言、学习、理解、推理、识别等)进行信息处理。 5.人工智能的主要研究和应用领域是什么? 答:问题求解,逻辑推理与定理证明,自然语言理解,自动程序设计,专家系统,机器学习,神经网络,机器人学,模式识别,机器视觉,智能控制,智能检索,智能调度与指挥,分布式人工智能与 Agent,计算智能与进化计算,数据挖掘与知识发现,人工生命。 6、人工智能的发展对人类有哪些方面的影响?试结合自己了解的情况何理解,从经济、社会何文化等方面加以说明?
通信原理课后习题
《通信原理》 第一章绪论 1.1什么是通信?通信系统是如何分类的? 1.2模拟信号和数字信号的区别是什么? 1.3何谓数字通信?数字通信的优缺点是什么? 1.4请画出数字通信系统的基本原理方框图,并说明各个环节的作 用? 1.5对于二进制信息源,在等概发送时,每一符号所包含的信息量是 否等于其平均信息量? 1.6衡量数字通信系统的主要性能指标是什么? 1.7设英文字母中A,B,C,D出现的概率各为0.001,0.023,0.003, 0.115,试分别求出它们的信息量。 1.8已知某四进制信源{0,1,2,3},当每个符号独立出现时,对应 的概率为P 0,P 1 ,P 2 ,P 3 ,且P +P 1 +P 2 +P 3 =1。 (1)试计算该信源的平均信息量。 (2)指出每个符号的概率为多少时,平均信息量最大,其值为多少? 1.9已知二进制信号的传输速率为4800bit/s,若码元速率不变,试问 变换成四进制和八进制数字信号时的传输速率各为多少? 1.10在强干扰环境下,某电台在5min内共接收到正确信息量为 355Mbit,假定系统信息速率为1200kbit/s。 (1)试问系统误码率P b 是多少?
(2)若具体指出系统所传数字信号为四进制信号,P 值是否改 b 变?为什么? (3)若假定数字信号为四进制信号,系统码元传输速率为 是多少/ 1200kBaud,则P b 1.11设一信息源的输出为由256个不同符号组成,其中32个出现的 概率为1/64,其余224个出现的概率为1/448。信息源每秒发出2400个符号,且每个符号彼此独立。试计算该信息源发送信息的平均速率及最大可能的信息速率。 1.12二进制数字信号一以速率200bit/s传输,对此通信系统连续进行 2h的误码测试,结果发现15bit差错。问该系统的误码率为多少? 如果要求误码率在1*107-以下,原则上应采取一些什么措施? 第二章随机信号分析 2.1 判断一个随机过程是广义平稳的条件? 2.2 平稳随机过程的自相关函数具有什么特点? 2.3 窄带高斯噪声的三种表示方式是什么? 2.4 窄带高斯白噪声中的“窄带”、“高斯”、“白”的含义各是什么? 2.5 高斯过程通过线性系统时,输出过程的一维概率密度函数如何? 输出过程和输入过程的数学期望及功率谱密度之间有什么关系? 2.6 设变量ε的分布为正态分布,E(ε)=2,D(ε)=1,求ε〈2的
机械设计基础课后习题与答案
机械设计基础 1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-?-?=1 1-6 解F =H L P P n --23=111283-?-?=1 1-7 解F =H L P P n --23=011283-?-?=2 1-8 解F =H L P P n --23=18263-?-?=1 1-9 解F =H L P P n --23=24243-?-?=2 1-10 解F =H L P P n --23=212293-?-?=1 1-11 解F =H L P P n --23=24243-?-?=2 1-12 解F =H L P P n --23=03233-?-?=3 2-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。 题2-1图
答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。 b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。 c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。 d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。 2-3 画出题2-3图所示个机构的传动角和压力角。图中标注箭头的构件为原动件。 题2-3图 解: 2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
人工智能复习题答案
一:单选题 1. 人工智能的目的是让机器能够(D),以实现某些脑力劳动的机械化。 A. 具有完全的智能 B. 和人脑一样考虑问题 C. 完全代替人 D. 模拟、延伸和扩展人的智能 2. 下列关于人工智能的叙述不正确的有(C)。 A. 人工智能技术它与其他科学技术相结合极大地提高了应用技术的智能化水平。 B. 人工智能是科学技术发展的趋势。 C. 因为人工智能的系统研究是从上世纪五十年代才开始的,非常新,所以十分重要。 D. 人工智能有力地促进了社会的发展。 3. 自然语言理解是人工智能的重要应用领域,下面列举中的(C)不是它要实现的目标。 A. 理解别人讲的话。 B. 对自然语言表示的信息进行分析概括或编辑。 C. 欣赏音乐。 D. 机器翻译。 4. 下列不是知识表示法的是(A)。 A. 计算机表示法 B. 谓词表示法 C. 框架表示法 D. 产生式规则表示法 5. 关于“与/或”图表示知识的叙述,错误的有(D)。 A. 用“与/或”图表示知识方便使用程序设计语言表达,也便于计算机存储处理。 B. “与/或”图表示知识时一定同时有“与结点”和“或结点”。 C. “与/或”图能方便地表示陈述性知识和过程性知识。 D. 能用“与/或”图表示的知识不适宜用其他方法表示。 6. 一般来讲,下列语言属于人工智能语言的是(D)。 A. VJ B. C# C. Foxpro D. LISP 7. 专家系统是一个复杂的智能软件,它处理的对象是用符号表示的知识,处理的过程是(C)的过程。 A. 思考 B. 回溯 C. 推理 D. 递归 8. 确定性知识是指(A)知识。 A. 可以精确表示的 B. 正确的 C. 在大学中学到的知识 D. 能够解决问题的 9. 下列关于不精确推理过程的叙述错误的是(B)。 A. 不精确推理过程是从不确定的事实出发 B. 不精确推理过程最终能够推出确定的结论 C. 不精确推理过程是运用不确定的知识 D. 不精确推理过程最终推出不确定性的结论 10. 我国学者吴文俊院士在人工智能的(A)领域作出了贡献。 A. 机器证明 B. 模式识别 C. 人工神经网络 D. 智能代理 11. 1997年5月12日,轰动全球的人机大战中,“更深的蓝”战胜了国际象棋之子卡斯帕罗夫,这是(C)。 A. 人工思维 B. 机器思维 C. 人工智能 D. 机器智能 12. 能对发生故障的对象(系统或设备)进行处理,使其恢复正常工作的专家系统 是(A)。 A.修理专家系统 B.诊断专家系统 C.调试专家系统 D.规划专家系统 13. 下列(D)不属于艾莎克.阿莫西夫提出的“机器人三定律”内容? A. 机器人不得伤害人,或任人受到伤害而无所作为 B. 机器人应服从人的一切命令,但命令与A相抵触时例外
机械设计基础-课后答案
第三章部分题解参考 3-5 图3-37所示为一冲床传动机构的设计方案。设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆 杆3带动导杆4来实现冲头上下冲压的动作。试分析此方案有无结构组成原理上的错误。若有,应如何修改? 习题3-5图 习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为: 14233 2345=-?-?=--=P P n F 其中:滚子为局部自由度 计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。 解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。其自由度为: 1 15243 2345=-?-?=--=P P n F ②将一个低副改为高副,如习题3-5解图(c)所示。其自由度为: 1 23233 2345=-?-?=--=P P n F 3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。 习题3-6(a)图 习题3-6(d)图 解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。 自由度计算: 1042332345=-?-?=--=P P n F
习题3-6(a)解图(a) 习题3-6(a)解图(b) 解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。 自由度计算: 1042332345=-?-?=--=P P n F 习题3-6(d)解图(a) 习题3-6(d)解图(b) 3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。 解(a) 10102732345=-?-?=--=P P n F A 、 B 、 C 、 D 为复合铰链 原动件数目应为1 说明:该机构为精确直线机构。当满足B E =BC =CD =DE ,AB =AD , AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF
人工智能练习题答案
1、什么是人工智能?人工智能有哪些研究领域?何时创建该学科,创始人是谁? (1)AI(Artificial Intelligence)是利用计算机技术、传感器技术、自动控制技术、仿生技术、电子技术以及其他技术仿制人类智能机制的学科(或技术),再具体地讲就是利用这些技术仿制出一些具有人类智慧(能)特点的机器或系统 (2)人工智能的研究领域主要有专家系统、机器学习、模式识别、自然语言理解、自动定力证明、自动程序设计、机器人学、博弈、智能决策支持系统、人工神经网络等 (3)人工智能于1956年夏季,由麦卡锡,明斯基、洛切斯特、香农等发起创建 2、产生式系统的由哪三部分组成?各部分的功能是什么? 课本29页 (1)产生式系统由综合数据库、产生式规则和控制系统三部分组成 (2)综合数据库用于存放当前信息,包括初始事实和中间结果; 产生式规则用于存放相关知识; 控制系统用于规则的解释或执行程序。 3、设有三枚硬币,其初始状态为(反,正,反),允许每次翻转一个硬币(只翻一个硬币,必须翻一个硬币)。必须连翻三次。用知识的状态空间表示法求出到达状态(反,反,反)的通路。画出状态空间图。 课本51页 问题求解过程如下: 页脚内容1
(1)构建状态 用数组表示的话,显然每一硬币需占一维空间,则用三维数组状态变量表示这个知识:Q=(q1 , q2 , q3) 取q=0 表示钱币的正面; q=1 表示钱币的反面 构成的问题状态空间显然为: Q0=(0,0,0),Q1=(0,0,1),Q2=(0,1,0), Q3=(0,1,1), Q4=(1,0,0),Q5=(1,0,1),Q6=(1,1,0),Q7=(1,1,1) (2)引入操作 f1:把q1翻一面。 f2:把q2翻一面。 f3:把q3翻一面。 显然:F={f1,f2,f3} 目标状态:(找到的答案)Qg=(0,0,0)或(1,1,1) (3)画出状态图 页脚内容2