A physical alpha-power law MOSFET model

A Physical Alpha-Power Law MOSFET Model
Keith A.Bowman,Blanca L.Austin,John C.Eble,Xinghai Tang,and James D.Meindl
Abstract—A new compact physics-based alpha-power law MOSFET model is introduced to enable projections of low power circuit performance for future generations of technology by linking the simple mathematical expressions of the original alpha-power law model with their physical origins.The new model,veri?ed by HSPICE simulations and measured data, includes:1)a subthreshold region of operation for evaluating the on/off current tradeoff that becomes a dominant low power design issue as technology scales,2)the effects of vertical and lateral high?eld mobility degradation and velocity saturation, and3)threshold voltage roll-off.Model projections for MOSFET CV/I indicate a2X-performance opportunity compared to the National Technology Roadmap for Semiconductors(NTRS) extrapolations for the250,180,and150nm generations subject to maximum leakage current estimates of the roadmap.NTRS and model calculations converge at the70nm technology generation, which exhibits pronounced on/off current interdependence for low power gigascale integration.
Index Terms—Alpha-power law,circuit design,CMOS,gigas-cale integration,physics-based model,technology projections.
I.I NTRODUCTION
T HE alpha-power law MOSFET model[1]is the most widely utilized compact drain current model due to its simple mathematical form and high degree of accuracy.The model has been used to derive many expressions for evaluating circuit performance.However,due to its empirical nature, the parameters of the model are measured values,which largely precludes projections of circuit performance for future generations of technology.Moreover,the model does not describe the subthreshold region and therefore on/off drain current tradeoffs cannot be thoroughly analyzed.The low power transregional MOSFET model[2]describes all regions of operation(subthreshold,triode,and saturation).The drain current equations are rigorously derived and provide insight into the physical basis of MOSFET behavior.Therefore,the low power transregional model is an advantageous choice for predicting performance of future technology generations and in particular for analyzing on/off drain current tradeoffs. The disadvantage of the low power transregional model is its relatively complex drain current equations.Coupling the alpha-power law and low power transregional models enables a new compact physics-based alpha-power law MOSFET model.Salient features of this new model include:1)extension into the subthreshold region of operation,2)the effects of Manuscript received February9,1999;revised July1,1999.This work was supported by the Semiconductor Research Corporation under Contract SJ-374and the Defense Advanced Research Project Agency under Contract F3361595C1623.
K.A.Bowman,B.L.Austin,X.Tang,and J.D.Meindl are with the Georgia Institute of Technology,Atlanta,GA30332-0269USA(e-mail: gt6078a@https://www.360docs.net/doc/991394535.html,).
J.C.Eble is with Compaq Corporation,Shrewsbury,MA01545USA. Publisher Item Identi?er S0018-9200(99)08224-4.vertical and lateral high?eld mobility degradation and velocity saturation,and3)threshold voltage roll-off.Therefore,the new physical alpha-power law model enables compact projections and physical insight into future circuit performance for low power gigascale integration(GSI).
II.M ODEL D ERIV ATION
The new physical alpha-power law model is derived by coupling the simple empirical alpha-power law MOSFET model[1]and the more complex physics-based low power transregional MOSFET model[2].The derivation of the new model begins by equating the saturation drain current of the alpha-power law model[1],(1)and the low power transregional model[2],
(2)
(1)
where(5)is a modi?ed drive current that includes an effective mobility dependence
on.Neglecting the small weak inversion contribution and performing a three-term binomial expansion of the bulk charge terms
in,the low power transregional model’s saturation drain current[2]may be simpli?ed
as
(2) where
()is the channel width-to-length
ratio,is the gate oxide capacitance per unit
area,is the effective mobil-ity including vertical[3]and lateral[4]high?eld degradation effects given
as
(6) From
(1)
(a)(b)
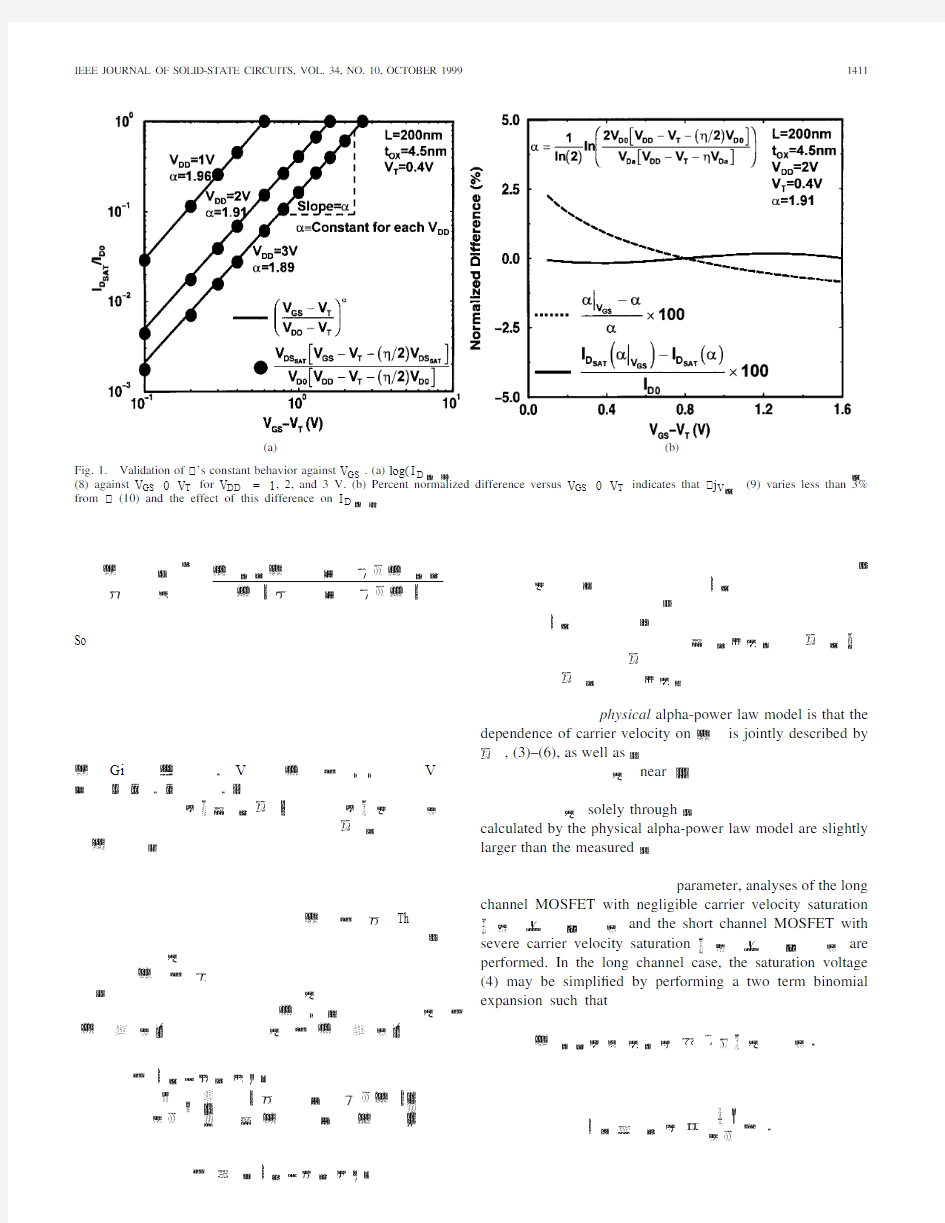
Fig.1.Validation of ’s constant behavior against V GS .(a)log(I D
(8)against V GS 0V T for V DD =1,2,and 3V.(b)Percent normalized difference versus V GS 0V T indicates that j
V (9)varies less than 3%
from (10)and the effect of this difference on I
D
So
Gi
V
V
Th
physical alpha-power law model is that the
dependence of carrier velocity
on
is jointly described
by ,(3)–(6),as well
as
near solely
through
calculated by the physical alpha-power law model are slightly larger than the
measured
parameter,analyses of the long
channel MOSFET with negligible carrier velocity
saturation
and the short channel MOSFET with
severe carrier velocity
saturation
are performed.In the long channel case,the saturation voltage (4)may be simpli?ed by performing a two term binomial expansion such
that
Fig.2.Physical alpha-power law MOSFET model.
(a)(b)
Fig.3.Veri?cation of the physical alpha-power law model against HSPICE simulations[7]for(a)I D versus V DS and(b)I D versus V GS.
velocity saturation the exponent
suf?ciently larger than
(16)
(a)(b)
Fig.4.Veri?cation of the physical alpha-power law model against measured data for (a)L =0:38 m [8]and (b)L =0:18 m [9].
where is the saturation velocity.Thus,for the short channel MOSFET with severe carrier velocity saturation the drain current in the saturation region approaches a linear dependence
of
m
(m)
technology generation in the:a)superthreshold region
(
).
Excellent agreement is demonstrated between the physical alpha-power law model and HSPICE simulations.A crucial element of the physical alpha-power law model is the sub-threshold analysis,which was neglected in the original alpha-power law model [1].Inclusion of the subthreshold region of operation provides key insight into the on/off current trade-off for future technology generations.Fig.4demonstrates that the model is in good agreement with measured data
for submicron technology generations:
a)
m [8]and
b)
m [9].Therefore,the new physical alpha-power law model retains the simplicity of the original alpha-power law model while providing a physical basis for the model parameters that enables circuit performance projections for future generations of technology including on/off current interdependence for low power GSI.
III.P ROJECTIONS U SING THE
P HYSICAL A LPHA -P OWER L AW M ODEL
Fig.5compares the MOSFET delay
metric
=W )to the maximum off current (Max I o )determined
in the roadmap.
and supply voltage are chosen in the range of parameters projected by the roadmap.For the model projections,the threshold voltage is calculated by equating the subthreshold drain current per unit width to the maximum off current
(Max
)speci?ed by the roadmap.Fig.5indicates a 2X-performance advantage for the ?rst three generations compared
to the NTRS calculations,subject to the maximum allowable leakage current.As technology scales,the extrapolations of the NTRS converge to the calculations predicted by the physical alpha-power law model thus indicating a signi?cant on/off current interdependence.
IV.C ONCLUSION
The complete physical alpha-power law MOSFET model is derived to describe all regions of operation(subthreshold, triode,and saturation)while providing a simple mathematical expression for calculations of circuit performance yet retaining a physical insight of model parameters.Validated against HSPICE and measured data,the model includes the effects of:1)vertical and lateral high?eld mobility degradation and velocity saturation and2)threshold voltage roll-off.The physical alpha-power law MOSFET model describes the entire range of velocity saturation from the long channel MOS-FET with negligible velocity saturation to the short channel MOSFET with severe velocity saturation.Model projections for MOSFET delay indicate a2X-performance opportunity compared to the roadmap extrapolations for the250,180,and 150nm generations subject to the maximum leakage current estimated by the roadmap.The NTRS and model calcula-tions converge at a technology generation of70nm,which indicates a signi?cant on/off current interdependence for low power GSI.
R EFERENCES
[1]T.Sakurai and A.R.Newton,“Alpha-power law MOSFET model and
its applications to CMOS inverter delay and other formulas,”IEEE J.
Solid-State Circuits,vol.25,pp.584–594,Apr.1990.
[2] B.Austin,K.Bowman,X.Tang,and J.D.Meindl,“A low power
transregional MOSFET model for complete power-delay analysis of CMOS gigascale integration(GSI),”in Proc.11th Annu.IEEE Int.ASIC Conf.,Sept.1998,pp.125–129.
[3]S.L.Garverick and C.G.Sodini,“A simple model for scaled MOS
transistors that includes?eld-dependent mobility,”IEEE J.Solid-State Circuits,vol.SC-22,pp.111–114,Feb.1987.
[4] B.T.Murphy,“Uni?ed?eld-effect transistor theory including velocity
saturation,”IEEE J.Solid-State Circuits,vol.SC-15,pp.325–327,June 1980.
[5]W.Shockley,“A unipolar?eld effect transistor,”Proc.IRE,vol.40,
pp.1365–1376,Nov.1952.
[6] A.Agrawal,V.K.De,and J.D.Meindl,“Opportunities for scaling
FET’s for gigascale integration(GSI),”in Proc.23rd Europ.Solid-State Device Research Conf.(ESSDERC),Sept.1993,pp.919–926.
[7]HSPICE User’s Manual,Meta-Software,Inc.,Campbell,CA,Mar.1995.
[8]R.A.Chapman,C.C.Wei,D.A.Bell,S.Aur,G.A.Brown,and R.
A.Haken,“0.5micron CMOS for high performance at3.3V,”in IEEE
Int.Electron Devices Meeting(IEDM)Tech.Dig.,1988,pp.52–55. [9]M.Bohr,S.U.Ahmed,L.Brigham,R.Chau,R.Gasser,R.Green,W.
Hargrove,E.Lee,R.Natter,S.Thompson,K.Weldon,and S.Yang,“A high performance0.35 m logic technology for3.3V and2.5V operation,”in IEEE IEDM Tech.Dig.,1994,pp.273–276.
[10]Semiconductor Industry Association,NTRS,1997.
直流电机驱动电路设计
直流电机驱动电路设计 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电 器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。 如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动
1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。 2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约 1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效
直流电机驱动电路设计
应用越来越广泛的直流电机,驱动电路设计 Source:电子元件技术| Publishing Date:2009-03-20 中心论题: ?在直流电机驱动电路的设计中,主要考虑功能和性能等方面的因素 ?分别介绍几种不同的栅极驱动电路并比较其性能优缺点 ?介绍PWM调速的实现算法及硬件电路 ?介绍步进电机的驱动方案 解决方案: ?根据实际电路情况以及要求仔细选择驱动电路 ?使用循环位移算法及模拟电路实现PWM调速 ?对每个电机的相应时刻设定相应的分频比值,同时用一个变量进行计数可实现步进电机的分频调速 直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1。输出电流和电压围,它决定着电路能驱动多大功率的电机。 2。效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3。对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4。对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5。可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2。7V 基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。
步进电机驱动电路设计
https://www.360docs.net/doc/991394535.html,/gykz/2010/0310/article_2772.html 引言 步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有l297和l298组合应用、3977、8435等,这些芯片一般单相驱动电流在2 a左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片tb6560提出了一种步进电机驱动电路的设计方案 1步进电机驱动电路设计 1.1 tb6560简介 tb6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥mosfet驱动;最高耐压40 v,单相输出最大电流3.5 a(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用hzip25封装。tb6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。 1.2步进电机控制信号隔离电路 步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(clk、cw、enable),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对clk、cw信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6n137高速光耦隔离clk、cw,其信号传输速率可达到10 mhz,1片tlp521普通光耦隔离enable信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。
步进电机控制驱动电路设计.
实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号:201216020134 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩:
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1kohm 1kohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
图五三相六拍正转 利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。 方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。 图六单,双三拍的电路图 单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
电机驱动电路的设计
《电子线路CAD》课程论文题目:电机驱动电路的设计
1 电路功能和性能指标 此电路是用MCU发出的PWM波来控制电机的转速的电路,电路输入电压是7.2V。 2 原理图设计 2.1原理图元器件制作 元器件截图: 图1 这个是图中的BTN7971的原理图,是一款电机驱动半桥芯片。 制作步骤: 1.点击菜单栏的放置,然后点击弹出的窗口中的矩形,如下图: 图2 2.然后鼠标光标下就会出现一个黄色的矩形边框,自己就可以随意设置边框的大小,之后框图的大小可以拖动修改,如下图:
图3 3.框图定好后,点击下图的图标,可以进行画引脚: 图4 4.放引脚时可以按table键设置引脚属性: 图5 2.2 原理图设计 ①原理图设计过程: 首先简历里一个PCB工程项目,保存命名为BTN驱动,然后在这个工程下面
建立一个原理图文件和一个PCB文件,并将其保存并重命名为BTN在与工程相同的目录下面,然后开始绘制原理图了,将所有设置默认为初始状态不需要更改,然后开始画原理图了,将其模块化绘图比较方便好看。 ②下面就是绘制成功后的原理图: 图6 ③下图为massage框图: 图7 其操作步骤为: 1.点击system中的message, 2.然后点击下图中高亮部分 图8
3.最后打开message就可以看见编译信息了 4.之后根据错误提示进行查找修改,直至没有错误和警告,如下图: 图9 ④该项目的元器件库截图如下: 图10 图11
生成原理图库的步骤为: 1.点击界面右下角的design compiler,然后点击如图高亮部分: 图12 2.点击界面上面的工具栏中的设计,然后点击高亮部分: 图13 3.最后可以查看刚才打开的navigater,如图:
较大功率直流电机驱动电路的设计方案
1 引言 直流电机具有优良的调速特性,调速平滑、方便、调速范围广,过载能力强,可以实现频繁的无级快速启动、制动和反转,能满足生产过程中自动化系统各种不同的特殊运行要求,因此在工业控制领域,直流电机得到了广泛的应用。 许多半导体公司推出了直流电机专用驱动芯片,但这些芯片多数只适合小功率直流电机,对于大功率直流电机的驱动,其集成芯片价格昂贵。基于此,本文详细分析和探讨了较大功率直流电机驱动电路设计中可能出现的各种问题,有针对性设计和实现了一款基于25D60-24A 的直流电机驱动电路。该电路驱动功率大,抗干扰能力强,具有广泛的应用前景。 2 H 桥功率驱动电路的设计 在直流电机中,可以采用GTR 集电极输出型和射极输出性驱动电路实现电机的驱动,但是它们都属于不可逆变速控制,其电流不能反向,无制动能力,也不能反向驱动,电机只能单方向旋转,因此这种驱动电路受到了很大的限制。对于可逆变速控制, H 桥型互补对称式驱动电路使用最为广泛。可逆驱动允许电流反向,可以实现直流电机的四象限运行,有效实现电机的正、反转控制。而电机速度的控制主要有三种,调节电枢电压、减弱励磁磁通、改变电枢回路电阻。三种方法各有优缺点,改变电枢回路电阻只能实现有级调速,减弱磁通虽然能实现平滑调速,但这种方法的调速范围不大,一般都是配合变压调速使用。因此在直流调速系统中,都是以变压调速为主,通过PWM(Pulse Width Mo dulation)信号占空比的调节改变电枢电压的大小,从而实现电机的平滑调速。 2.1 H 桥驱动原理 要控制电机的正反转,需要给电机提供正反向电压,这就需要四路开关去控制电机两个输入端的电压。当开关S1 和S4 闭合时,电流从电机左端流向电机的右端,电机沿一个方向旋转;当开关S2 和S3 闭合时,电流从电机右端流向电机左端,电机沿另一个方向旋转, H 桥驱动原理等效电路图如图1 所示。
电机及电机驱动模块设计
电机及电机驱动模块设计 1.电机选择 通过对各种电机性能的初步查询和在单片机开发板上对于步进马达和PWM直流电机的实验,我们了解到:步进电机的优点是可以精确定位,但缺点是耗电量大,若采用电池供电,可能不能长时间工作,此外,采用步进电机需要两块驱动板,控制复杂。而直流电机的缺点是不能实现精确定位,但是可以通过调节PWM波实现调速,但在电源相同的条件下,速度较慢;优点是耗电小。由于设备有限,我们无法精确测量两种电机工作时的实际工作电流,上述比较出自文献[1]与产品参数的分析。结合我们的需求,最终决定选择普通直流电机。2.增加驱动、实现换向、实现调速 由于电机属于大功率的器件,而单片机的I/O口所提供的电流往往十分有限,所以必须外加驱动电路来增大驱动;由于我们小车中即将使用的直流电机没有电刷,且供电电源为单电源,所以需要设计一个电子开关以实现换向功能。通过对电机驱动原理的研究得知使用H 桥电路可以实现这两个功能。 从图中可以看出,在上面电路由于内部采用了三极管,三极管本身起到放大的作用,即增大了驱动电流;假设开关A、D接通,电机正向转动,而开关B、C接通时,直流电机将反向转动,从而实现了电机的正反控制。 依据这个原理,我们决定直接使用结构较为简单、价格便宜且可靠性高的电机驱动芯片来连接单片机与电机以减少电路搭建的麻烦和硬件设计的复杂性。电机驱动芯片L298N内部的组成其就是H桥驱动电路,其内部电路图如下:
各引脚功能以及性能参数再次不做赘述。因为小车中打算采用两个直流电机,而选择的L298的特点是工作电压高,输出电流大。因此决定设计单片机和电机独立供电,即控制电路和驱动电路双电源供电。优点是可以保证电源功率和电压大小满足需要,可提高系统的稳定性。缺点是电机驱动模块中独立电影的增加会使车体变重,可能影响小车的运行效果。 最后将L298的引脚正确连接到单片机PO口并拉上电阻,通过Keil对单片机编写程序让小车上的两个电机正反转即可实现小车前进。目前已经写出使两个电机正转的程序,等待测试。小车左右转向的程序设计还未完成。 结构框图
直流电机驱动电路设计的一些知识
一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动 时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。 如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管, 场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DA TA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。 2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效
电机驱动电路(详细)
电机驱动电路 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向 转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继 电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三 极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K 欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成
步进电机驱动电路设计
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器) L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可靠,通过按键控制,操作方便,节省成本。 关键词:步进电机,单片机控制,AT89S52,L297,L298
常用电机驱动电路及原理
由于本人主要是搞软件的,所以硬件方面不是很了解,但是为了更好地相互学习,仅此整理出一份总结出来,有什么错误的地方还请大家积极的指出!供大家一起参考研究! 我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好的电机驱动电路非常必要! 常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的33886芯片,还有就是L298芯片,其中298是个很好的芯片,其内部可以看成两个H桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的一个良选!由于他们的驱动电流较小(33886最大5A持续工作,298最大2A持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册!在此只是提供他们的电路图,不作详细介绍! 33886运用电路图
下面着重介绍我们智能车可能使用的驱动电路。普遍使用的是英飞凌公司的半桥驱动芯片BTS7960搭成全桥驱动。其驱动电流约43A,而其升级产品BTS7970驱动电流能够达到70几安培!而且也有其可替代产品BTN79 70,它的驱动电流最大也能达七十几安!其内部结构基本相同如下: 每片芯片的内部有两个MOS管,当IN输入高电平时上边的MOS管导通,常称为高边MOS管,当IN输入低电平时,下边的MOS管导通,常称为低边MOS 管;当INH为高电平时使能整个芯片,芯片工作;当INH为低电平时,芯片不工作。其典型运用电路图如下图所示: EN1和EN2一般使用时我们直接接高电平,使整个电路始终处于工作状态!
较大功率直流电机驱动电路的设计方案
较大功率直流电机驱动电路的设计方案 1引言 直流电机具有优良的调速特性, 调速平滑、方便、调速范围广, 过载能力强, 可以 实现频繁的无级快速启动、制动和反转, 能满足生产过程中自动化系统各种不同的特殊运 行要求,因此在工业 控制领域,直流电机得到了广泛的应用。 许多半导体公司推出了直流电机专用驱动芯片, 但这些 芯片多数只适合小功率直流电 机,对于大功率直流电机的驱动, 其集成芯片价格昂贵。 了较大功率直流电机驱动电路设计中可能出现的各种问题, 于 25D60-24A 的直流电机驱动电路。 该电路驱动功率大, 用前景。 2 H 桥功率驱动电路的设计 无制动 能力, 也不能反向驱动, 电 因此这种驱动电路受到了很大的限制。 对于可逆变速 控制,H 桥型互 可逆驱动允许电流反向, 可以实现直流电机的四象限运 控制。而电机速度的 控制主要有三种, 调节电枢 电压、减 三种方法各有优缺点, 改变电枢回路电阻只能实现有级 调速,减弱磁通虽然能实现平滑调速, 但这种方法的调速范围不大, 一般都是配合变压 调速使用。 因此在直流调速系统中, 都是以变压调速为主, 通过PWM(P ulse Width Modulatio n)信号占空比的调节改变电枢 电压的大小, 从而实现电机的平滑调速。 H 桥驱动原理 要控制电机的正反转, 需要给电机提供正反向 虫压,这就需要四路开关去控制电机两 个输入端的电压。当开关S1和S4闭合时,电流从电机左端流向电机的右端, 电机沿一 基于此,本文详细分析和探讨 有针对性设计和实现了一款基 抗干扰能力强,具有广泛的应 在直流电机中,可以采用GTR 集电极输出型和射极输出性驱动电路实现电机的驱动, 但是它们都属于不可逆变速 控制,其电流不能反向, 无制动能力, 也不能反向驱动, 机只能单方向旋转, 补对称式驱动电路使用最为广泛。 行,有效实现电机的正、反转 弱励磁磁通、改变电枢回路电阻。
L6203直流电机驱动设计原理图及例程
L6203直流电机控制驱动器 【简要说明】 一、尺寸:长66mmX宽33mm X高28mm 二、主要芯片:L6203 三、工作电压:控制信号直流4.5~5.5V;驱动电机电压7.2~30V 四、可驱动直流(7.2~30V之间电压的电机) 五、最大输出电流4A 六、最大输出功率20W 七、特点:1、具有信号指示 2、转速可调 3、抗干扰能力强 4、具有续流保护 5、可单独控制一台直流电机 6、PWM脉宽平滑调速(可使用PWM信号对直流电机调速) 7、可实现正反转 8、此驱动器非常时候控制飞思卡尔智能车,驱动器压降小,电流大,驱动能力强。 【标注图片】
直流电机的控制实例 使用驱动器可以控制一台直流电机。电机分别为OUT1和OUT2。输入端EN可用于输入PWM脉宽调制信号对电机进行调速控制。(如果无须调速可将EN使能端,接高低电平,高电平启动,低电平停止。也可由单片机输出直接控制)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机正转。(如果信号端IN1接低电平,IN2接高电平,电机反转。)可参考下图表: 直流电机测试程序 【原理图】
【测试程序】 /******************************************************************** 汇诚科技 实现功能:调试程序 使用芯片:AT89S52 或者 STC89C52 晶振:11.0592MHZ 编译环境:Keil 作者:zhangxinchun 淘宝店:汇诚科技 *********************************************************************/ #include
详解直流电机驱动电路设计
直流电机(direct current machine)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。它 是能实现直流电能和机械能互相转换的电机。当它作电动机运行时是直流电 动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换 为电能。 直流电机的基本构成 直流电机由定子和转子两部分组成,其间有一定的气隙。 直流电机的定子由机座、主磁极、换向磁极、前后端盖和刷架等部件组成。其中主磁极是产生直流电机气隙磁场的主要部件,由永磁体或带有直流 励磁绕组的叠片铁心构成。 直流电机的转子则由电枢、换向器(又称整流子)和转轴等部件构成。 其中电枢由电枢铁心和电枢绕组两部分组成。电枢铁心由硅钢片叠成,在其 外圆处均匀分布着齿槽,电枢绕组则嵌置于这些槽中。 换向器是一种机械整流部件。由换向片叠成圆筒形后,以金属夹件或塑 料成型为一个整体。各换向片间互相绝缘。换向器质量对运行可靠性有很大 影响。 直流电机的组成结构 直流电机的结构应由定子和转子两大部分组成。直流电机运行时静止不 动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。运行时转动的部分称为转子,其主要作用是 产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又 称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。 01定子 主磁极 主磁极的作用是产生气隙磁场。主磁极由主磁极铁心和励磁绕组两部分 组成铁心一般用0.5mm~1.5mm厚的硅钢板冲片叠压铆紧而成,分为极身和 极靴两部分,上面套励磁绕组的部分称为极身,下面扩宽的部分称为极靴, 极靴宽于极身,既可以调整气隙中磁场的分布,又便于固定励磁绕组。励磁 绕组用绝缘铜线绕制而成,套在主磁极铁心上。整个主磁极用螺钉固定在机 座上。
电机驱动电路设计
电机驱动电路设计 摘要:本课题首先对DIFG的运行理论进行分析,建立了DIFG数学模型,对坐标变换及运行特性进行了理论研究,为双馈电机实际电路研究奠定了理论基础。然后设计出驱动电路,最后通过软件仿真,验证设计模型和电路的正确性。 关键词:PWM,模型,MATLAB仿真 发电机及整个电机系统是风力发电设备的核心,它决定着风力发电的效率和发电容量,发电系统的性能也决定着风力发电的成本和电能质量。根据发电机的性能和主要特征,风力发电机主要有恒速恒频和变速变频两种发电技术。受发电风扇和自然条件限制,市场上主要运用变速变频技术。 双馈电机可以简单认为是两台交流电机相连组成,。定子上有两套绕组,一套是功率绕组,接工频电源;另一套是控制绕组,接控制电源。两套绕组之间通过转子绕组间进行功率传递,没有电子耦合。 根据双馈电机原理,分析调速原理:绕组频率为f1,U1为固定的三项电源,控制绕组频率为f2,可调电源电压为U2。电机转速为n,可以算出电机同步转速:ns1=60f1/p。 转差率:
感应电流频率:, 电机是一种将其他能量转换为电能的装置,所有电机中都有气隙磁场的存在。风力发电过程中,风能通过转子转换为机械能,在无刷双馈电机中,机械能克服气隙磁场中电磁力所做的功,通过磁生电的过程,不断的将所产生电能输出,实现机械能向电能的转换[7]。 Pe2为转子绕组传送的电功率,为转差率s和电磁功率Pm的乘积;对于投入使用的发电机来说,Pm是固定的,所以,s的正负决定着转子向变频电源输出功率或获取功率。 转子侧的PWM变换器连接主侧PWM变换器和双馈发电机。对转子侧的PWM变换器的控制,可以起到控制整个风力发电系统的目的。所以转子侧PWM变换器在整个发电系统中起着至关重要的作用。 转子侧的PWM变换器的主要作用是实现在转子侧对双馈电机的矢量控制,实现有用和无用两种功率的单独调节。为了实现PWM变换器对不同双馈发电机的有效控制,要对不同的发电系统制定不同的PWM变换器控制方案。双馈型发电系统是一种高阶、非线性系统,对其有效控制有一定的难度。如果要想达到对发电系统中有用功率和无用功率的控制,必须实现功率解耦,可以通过坐标变换简化双馈发电机的数学模型,实现转子中无功功率和有功功率的分别控制。使发电机能够捕获最大风能,运行在最大功率状态下。
电机驱动电路的设计要点和技巧
电机驱动电路的设计要点和技巧 一、在电机驱动电路的设计中,主要考虑一下几点: 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
详解直流电机驱动电路的设计
直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑以下几点: 功能: 电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 性能: 对于PWM调速的电机驱动电路,主要有以下性能指标: 1.输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2.效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电 路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3.对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高 电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4.对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染; 大的电流可能导致地线电位浮动。 5.可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源 负载,电路都是安全的。 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供
信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防 止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动 板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同 来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压 幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一 个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的 高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截 止 2. 栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管 的栅极并利用场效应管本身的栅极电容(大约1000pF)进行延时,防止H桥上 下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极 管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的 三极管导通,场效应管截止。上面的三极管截止,场效应管导通,输出为低 电平。 上面的分析是静态的,下面讨论开关转换的动态过程:三极管导通电阻 远小于2千欧,因此三极管由截止转换到导通时场效应管栅极电容上的电荷 可以迅速释放,场效应管迅速截止。但是三极管由导通转换到截止时场效应 管栅极通过2千欧电阻充电却需要一定的时间。相应的,场效应管由导通转 换到截止的速度要比由截止转换到导通的速度快。假如两个三极管的开关动 作是同时发生的,这个电路可以让上下两臂的场效应管先断后通,消除共态 导通现象。 实际上,运放输出电压变化需要一定的时间,这段时间内运放输出电压 处于正负电源电压之间的中间值。这时两个三极管同时导通,场效应管就同 时截止了。所以实际的电路比这种理想情况还要安全一些。 场效应管栅极的12V稳压二极管用于防止场效应管栅极过压击穿。一般 的场效应管栅极的耐压是18V或20V,直接加上24V电压将会击穿,因此这 个稳压二极管不能用普通的二极管代替,但是可以用2千欧的电阻代替,同 样能得到12V的分压。 3.场效应管输出部分: 大功率场效应管内部在源极和漏极之间反向并联有二极管,接成H桥使 用时,相当于输出端已经并联了消除电压尖峰用的四个二极管,因此这里就 没有外接二极管。输出端并联一个小电容(out1和out2之间)对降低电机产 生的尖峰电压有一定的好处,但是在使用PWM时有产生尖峰电流的副作用, 因此容量不宜过大。在使用小功率电机时这个电容可以略去。如果加这个电 容的话,一定要用高耐压的,普通的瓷片电容可能会出现击穿短路的故障。