图解太阳方位
图解太阳方位
陕西兴平兴化学校丁官福
一、不同地区的太阳方位
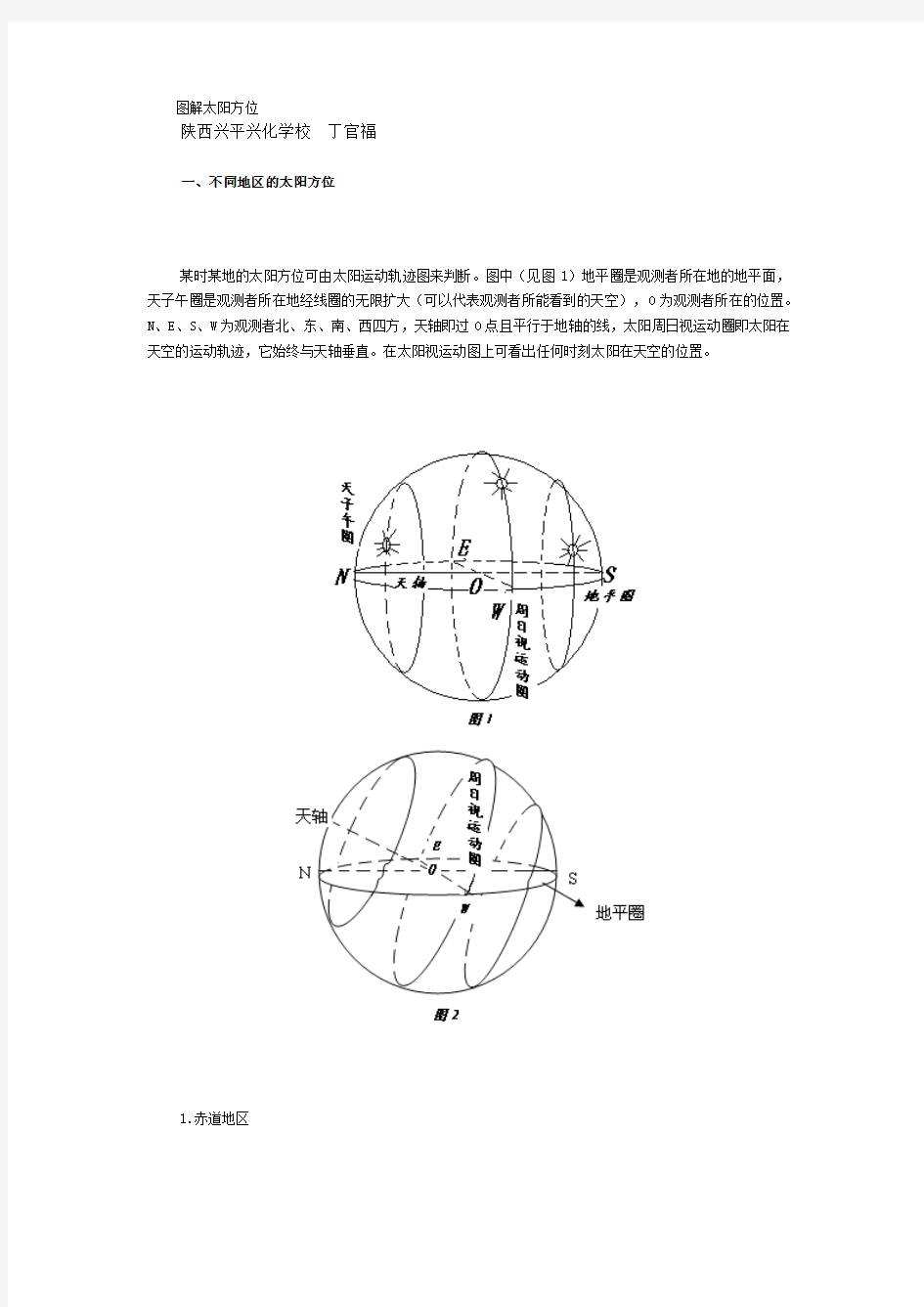
某时某地的太阳方位可由太阳运动轨迹图来判断。图中(见图1)地平圈是观测者所在地的地平面,天子午圈是观测者所在地经线圈的无限扩大(可以代表观测者所能看到的天空),O为观测者所在的位置。N、E、S、W为观测者北、东、南、西四方,天轴即过O点且平行于地轴的线,太阳周日视运动圈即太阳在天空的运动轨迹,它始终与天轴垂直。在太阳视运动图上可看出任何时刻太阳在天空的位置。
1.赤道地区
赤道上,地平圈与地轴(天轴)平行即与赤道平面垂直。所以太阳直升直落。二分时太阳由正东升起正西落下,正午位于天顶;夏半年东北升西北落,正午太阳在正北;冬半年太阳东南升西南落,正午在正南。(图1)
2.北半球中纬地区(除有极昼的地区)
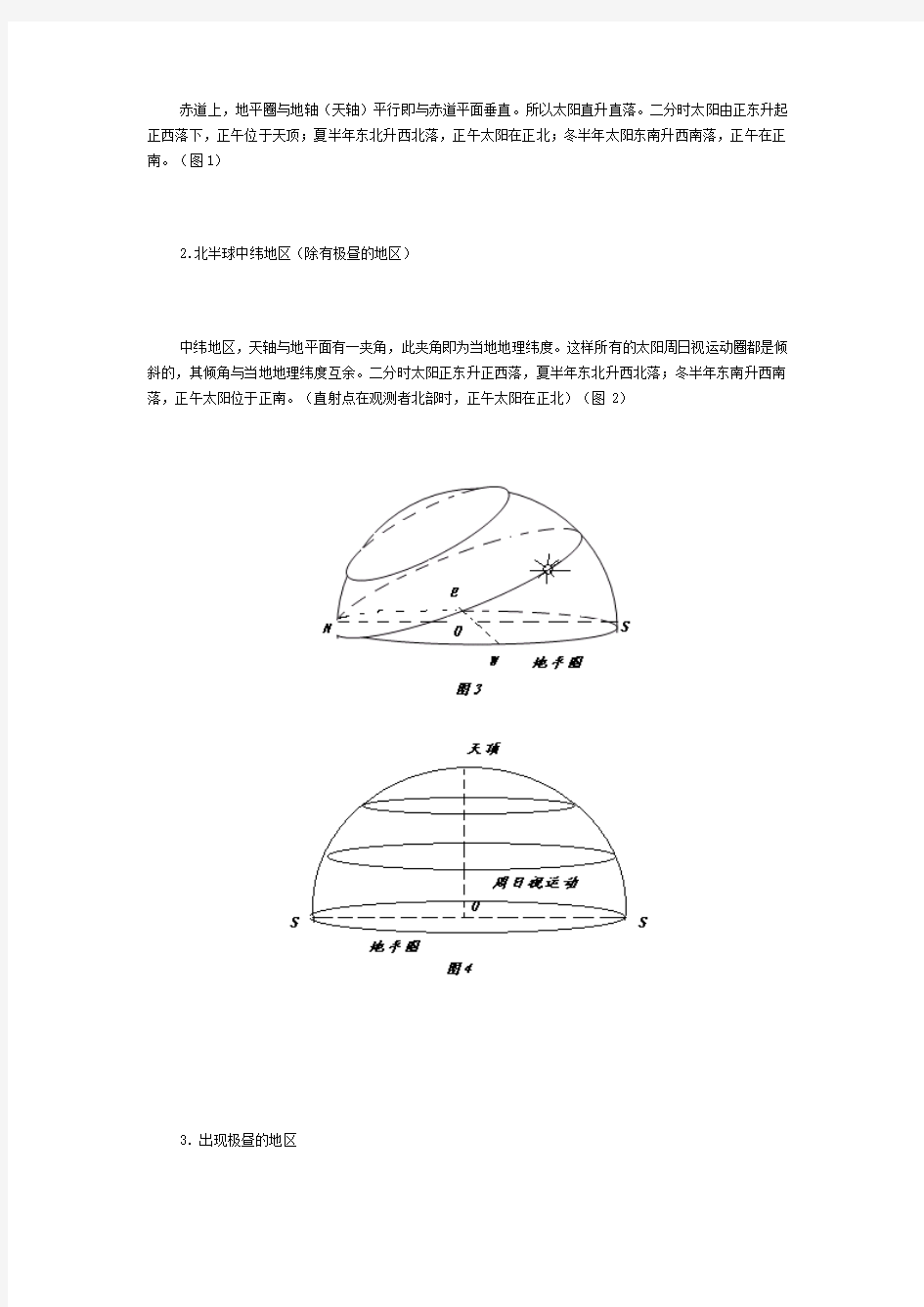
中纬地区,天轴与地平面有一夹角,此夹角即为当地地理纬度。这样所有的太阳周日视运动圈都是倾斜的,其倾角与当地地理纬度互余。二分时太阳正东升正西落,夏半年东北升西北落;冬半年东南升西南落,正午太阳位于正南。(直射点在观测者北部时,正午太阳在正北)(图2)
3.出现极昼的地区
高纬有极昼的地区,太阳周日视运动圈始终位于地平面之上,午夜时太阳由正北向南部天空斜升,正午过后由南部天空向北部地平面斜落,午夜时太阳处于北方最低点。(图3)
4.北极点
北极,地平面与天轴垂直,此时太阳周日视运动圈与地平面平行,此时太阳始终不升也不落。并且太阳高度保持不变,而且始终在正南方向。(图4)
二、太阳方位的应用
1.确定方向
就北半球大多数地区而言,早晨日出时太阳位于东方,中午在南方,日落于西方。利用这种位置关系,我们在野外就可以依据太阳方位大致判断方向。具体方法是先确定出当地的地方时,然后再看太阳,就可以大致判断出当地的方向。
2.判断日影朝向
由于日影总是指向与太阳相反的方向,所以判断某一时刻的日影朝向,只需作物体与太阳的连线并反向延长即可判断出日影的方向。
3.判断昼夜长短
对于一个地区来说,太阳位于地平面之上时即为昼,位于地平面之下时即为夜。这样一个地区的昼夜长短取决于太阳周日视运动圈被地平面所分成的两部分的弧长。地平面之上的弧长可代表昼长,地平面之
下的弧长可代表夜长。如果地上部分大于地下部分即该地昼长夜
短,反之依然;如果太阳周日视运动圈全部位于地平面之上说明该
地出现极昼,昼长为24小时;如果太阳周日视运动圈全部位于地
平面之下说明该地出现极夜,昼长为0。
4.正午太阳高度
在太阳周日视运动图上,太阳位置的最高点即为观测者所在地的正午时分,该日的正午太阳高度只需把观测者与太阳连接起来,该线与地面的夹角即为当地的正午太阳高度,而且依据太阳高度可进一步推算出当地的地理纬度。(图5)
5.判断季节
对北半球而言,太阳从东北升西北落为夏季,从东南升西南落为冬季,正东升正西落是春、秋分。
三、举例
例一艘油轮从波斯湾驶往我国沿海。6月下旬经马尔代夫附近海域、马六甲海峡到新加坡,该油轮()(05全国I)
A.先顺水航行,后逆水航行
B.桅杆的日影始终出现在南侧
C.可以不经过吉隆坡西南海域
D.航行期间,雨少晴多
解析:油轮由马尔代夫经马六甲海峡到新加坡,船只始终在赤道以北的赤道附近海域航行,6月下旬,太阳直射在北回归线附近,所以此时正午太阳位于船只正北方。另外6月份太阳由东北升,西北落。所以一天之中太阳始终在桅杆的偏北方向,这样桅杆日影始终出现在南侧。答案为B。
太阳能自动跟踪系统方案
摘要 人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,但是太阳能又存在着低密度、间歇性、空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高。太阳光线自动跟踪装置解决了太阳能利用率不高的问题。本文对太阳能跟踪系统进行了机械设计和自动跟踪系统控制部分设计。 第一,机械部分设计: 机械结构主要包括底座、主轴、齿轮和齿圈等。当太阳光线发生偏离时,控制部分发出控制信号驱动步进电机1带动小齿轮1转动,小齿轮带动大齿轮和主轴转动,实现水平方向跟踪;同时控制信号驱动步进电机2带动小齿轮2,小齿轮2带动齿圈和太阳能板实现垂直方向转动,通过步进电机1、步进电机2的共同工作实现对太阳的跟踪。 第二,控制部分设计: 主要包括传感器部分、信号转换电路、单片机系统和电机驱动电路等。系统采用光电检测追踪模式实现对太阳的跟踪。传感器采用光敏电阻,将两个完全相同的光敏电阻分别放置于一块电池板东西方向边沿处下方。当两个光敏电阻接收到的光强度不相同时,通过运放比较电路将信号送给单片机,驱动步进电机正反转,实现电池板对太阳的跟踪。 关键词太阳能;跟踪;光敏电阻;单片机;步进电机
Abstract Human being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on.These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar.In this paper, the solar tracking system of the mechanical part and control system part are designed. First,the mechanical part is designed. Mechanical structure mainly includes the main spindle, stepping motors, gears and gear ring, and so on. When the sun's rayshas a deviation, small gear arerotated by stepper motor according to the control signal from MCU. And the large gear and main spindle is rotated by small gear in order to track to achieve the level direction.At the same time, another small gear is rotated by another stepper motor according to the control signal.And the large gear and the solar panels are rotated by the small gear in order to track to achieve the vertical direction. Solar is tracked by the two stepper motors together. Second, control system part is designed. Control system mainly includesthe sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection systemisused to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances receiveddifferent light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors. Keywords Solar energyTrackingPhotosensitive resistance SCMSteppingmotor
太阳方位探测器
分类号:TP271+.5 U D C:D10621-408-(2014)0404-0 密级:公开编号:2010021180 成都信息工程学院 学位论文 太阳方位探测器 论文作者姓名:张中山 申请学位专业:电子信息工程 申请学位类别:工学学士 指导教师姓名(职称):王江(副教授) 论文提交日期:2014年6月4日
独创性声明 本人声明所呈交的学位论文是本人在导师指导下进行的研究工作及取得的研究成果。据我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得成都信息工程学院或其它教育机构的学位或证书而使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示谢意。 签名:日期:2014年6月9日 关于论文使用授权的说明 本学位论文作者完全了解成都信息工程学院有关保留、使用学位论文的规定,有权保留并向国家有关部门或机构送交论文的复印件和磁盘,允许论文被查阅和借阅。本人授权成都信息工程学院可以将学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存、汇编学位论文。 (保密的学位论文在解密后应遵守此规定) 签名: 日期:2014年6月9日
太阳方位探测器 摘要 由于当今世界能源越来越匮乏,以常规能源为基础的普通能源结构随资源的不断消耗将越来越不适应可持续发展的需要。同时,常规能源的过量消耗引起的环境污染日益严重,人们迫切需要找到一种更加绿色的能源来维持人类的发展,太阳能是已知的最原始的能源,它干净、可再生、取之不尽用之不竭,具有非常广阔的利用空间。但太阳能利用率低这一问题一直影响和阻碍着太阳能利用的普及和扩张。太阳能自动跟踪系统就是为解决这一问题而设计的,它大大的提高了太阳能的利用效率。而本文则阐述了采用视日运动轨迹跟踪的方法来探测太阳的方位,探测太阳的方位是跟踪太阳的基础,它由天文公式根据当地经纬度和当前时间计算太阳方位,MCU控制系统,利用步进电机双轴驱动,通过对跟踪机构进行水平、俯仰两个自由度的控制,调整太阳能电池板的角度实现对太阳方位的探测。 关键词:太阳方位;探测器;MCU;步进电机 I
基于单片机的太阳跟踪系统设计
基于单片机的太阳跟踪系统设计 摘要:针对现代社会能源越来越匮乏的现状,以常规能源为基础的能源结构随资源的不断好用将愈来愈不适应可持续发展的需要。太阳能是已知的最原始的能源它干净、可再生、丰富,而且分布范围广,具有非常广阔的利用前景。但太阳能利用效率低,这一问题一直影响和阻碍着太阳能技术的普及。太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了太阳能的利用效率。本设计采用光电跟踪的方法,利用步进电机双轴驱动,由光电传感器根据入射光线的强弱变化产生反馈信号到微机处理器。微机处理器运行程序,通过对跟踪机构进行水平、俯仰两个自由度的控制,调整太阳能电池板的角度实现对太阳的跟踪。采用单片机来实现的太阳能追踪系统能有效提高太阳板的光电转化效率,并具有较广泛的应用前景。 关键词:太阳能;跟踪;光敏二极管;单片机;步进电机
Design of Sun Tracking System Based on Single Chip Microcomputer Abstract: According to the status that increasingly lack of energy in modern society, conventional energy-based energy structure with the continuous consumption of resources will become increasingly unsuited to the needs of sustainable development. Solar energy is known as the most primitive energy, and it is clean、renewable、rich and wide distribution and has wide prospects of use. But the solar energy utilization efficiency is low; the problem has been influencing and hindering the popularity of solar energy technology. Solar energy to be automatic tracking system designed to solve the problem provide the new way which greatly improve the efficiency in the use of solar energy. This design uses the photoelectric tracking method, and use the stepping motor driver, by photoelectric sensor incident, then the strength o f the light’s changes produce feedback signals to the computer processor, and computer processor will run the program, through the horizontal tracking mechanism and pitch two degrees of freedom control to adjust the angle of solar panels to achieve the tracking of the sun. Solar tracking system by single chip microcomputer to achieve can improve the efficiency of conversion of photoelectric Solar panels, and has a broad prospect of application. Key words:Solar energy;Tracking;Photosensitive diode ;SCM;Stepping motor
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计 1引言 开发新能源和可再生资源是全世界面临的共同课题,在新能源中,太阳能发电已成为全球发展最快的技术。太阳能作为一种清洁无污染的能源,开发前景十分广阔。然而由于太阳存在着间隙性,光照强度随着时间不断变化等问题,这对太阳能的收集和利用装置提出了更高的要求(见图1)。目前很多太阳能电池板阵列基本都是固定的,不能充分利用太阳能资源,发电效率低下。据测试,在太阳能电池板阵列中,相同条件下采用自动跟踪系统发电设备要比固定发电设备的发电量提高35%左右。 所谓太阳能跟踪系统是能让太阳能电池板随时正对太阳,让太阳光的光线随时垂直照射太阳能电池板的动力装置,能显著提高太阳能光伏组件的发电效率。目前市场上所使用的跟踪系统按照驱动装置分为单轴太阳能自动跟踪系统和双轴太阳能自动跟踪系统。所谓单轴是指仅可以水平方向跟踪太阳,在高度上根据地理和季节的变化人为的进行调节固定,这样不仅增加了工作量,而且跟踪精度也不够高。双轴跟踪可以在水平方位和高度两个方向跟踪太阳轨迹,显然双轴跟踪优于单轴跟踪。 图1 太阳能的收集装置现场 从控制手段上系统可分为传感器跟踪和视日运动轨迹跟踪(程序跟踪)。传感器跟踪是利用光电传感器检测太阳光线是否偏离电池板法线,当太阳光线偏离电池板法线时,传感器发出偏差信号,经放大运算后控制执行机构,使跟踪装置从新对准太阳。这种跟踪装置,灵敏度高,但是遇到长时间乌云遮日则会影响运行。视日运动轨迹跟踪,是根据太阳的实际运行轨迹,按照预定的程序调整跟踪装置。这种跟踪方式能够全天候实时跟踪,其精度不是很高,但是符合运行情况,应用较广泛。 从主控单元类型上可以分为PLC控制和单片机控制。单片机控制程序在出厂时由专业人员编写开发,一般设备厂家不易再次进行开发和参数设定。而学习使用PLC比较容易,通过PLC厂家技术人员的培训,设备使用厂家的技术人员可以很方便的学会简单的调试和编写,并且PLC能够提供多种通讯接口,通讯组网也比较方便简单。
太阳能电池的方位跟踪方案比较与设计
2008 年 第2期 能源研究与利用 太阳能电池的方位跟踪方案比较与设计 梁勇1,梁维铭2 (桂林电子科技大学电子工程学院,广西桂林 541004) 摘要:分析了太阳能利用中的开环、闭环跟踪的特点,比较了目前常见的几种太阳方位跟踪方案的优劣并说明了它们的应用场合。提出能适应全天候的一种新型低能耗、高利用率太阳能方位跟踪系统———多方位跟踪。还分析了多方位跟踪的优缺点,并给出设计模型。通过实验对跟踪系统的实用性进行了验证,结果达到预定的性能指标,具有广泛应用的潜力。 关键词:太阳能电池;多方位跟踪;双轴跟踪 Abstract:Thispaperanalyzedthecharacteristicsinutilizationofsolarenergyintoopen-loop,closed-looptracking,comparedthecurrentcommoninthesolarazimuthtracking,aswellastheiradvantagesanddisadvantages,andexplaintheirapplications.Finally,presentedanewtypeofall-weather,low-energyconsumption,andhighefficiencysolarazimuthtrackingsystem-multi-directionaltracking.Alsoanalyzedtheadvantagesanddisadvantagesofmulti-directionaltracking,andgaveitsdesignmodel.Troughexperimentsonthepracticalityoftrackingsystemwasverified,andtheresultpredeterminedperformanceindex,whichhaswidespreadapplications. Keywords:solarcell;muti-azimuthtrack;two-axestrack 中图分类号:TK512 文献标志码:A 文章编号:1001-5523(2008)02-0004-04 目前太阳能光伏发电研究非常活跃,太阳能电池板的前端即太阳能方位跟踪很重要,一般采用跟踪技术能提高发电效率30%以上[1]。所以人们在方位跟踪方面提出了很多的研究方法和设计方案,并有很多跟踪技术已经应用到实际的光伏发电中,产 生了很好的实用效果。 1 跟踪控制方式分类 在太阳能利用中常见的跟踪装置的控制系统, 按照控制系统对控制量(电机转速,转角等)进行控制时,被控制量(跟踪装置的位置,转角)对控制量产不产生影响,即是否存在着反馈,可以把控制系统划分为三类:闭环、 开环、混合控制方式[2],若存在反馈的称为闭环控制,若不存在反馈的称为开环控制,混合控制顾名思义就是开环和闭环控制方式的结合。 1.1 开环式 开环控制要先确定一个初始位置,根据某时刻太阳相对位置的差值,计算出电机转过该差值所需的脉冲数。该跟踪控制方式又分为时钟跟踪和程序跟踪方式[3]。 这种方法虽然控制简单,易于实现,但存在当电机失步和堵转时,跟踪就不准确;当连续阴雨天时,不仅不能发电,同时系统连续运行还会消耗大量的功率。 1.1.1定时时钟法 时钟跟踪方式,原理图见图1。根据太阳在天空 中每分钟的运动角度,计算出太阳能电池板每分钟应转动的角度,从而确定出电动机的转速,使得电池板根据太阳的位置而相应变动。这种方法称为定时法。这种跟踪可以看作对太阳运动的时角进行跟踪,所以也可称为时角跟踪。该方法优点是电路简单,但由于不同季节日出日落的时间不同,会降低该系统调整的精确度。 研究与探讨 4??
日出方位角的判断及计算
日出方位角的判断及计算 纵观近年来各地的高考题和模拟试题,涉及日出方位角考查的题目不在少数,而这个知识点可以说是高中阶段自然地理的最难点之一,学生很难理解和掌握。下面本文就这个问题进行具体的阐述。 日出方位角,即日出时,太阳所在方位与正东方向的夹角。根据太阳视运动图(图1),可知:太阳直射北半球时,除极昼、极夜区域外,全球太阳东北升西北落;太阳直射南半球时,除极昼、极夜区域外,全球太阳东南升西南落;直射赤道时,除南北极点外,全球太阳正东升正西落。 然而,不同纬度的日出方位角(日出方位偏离正东方的角度)到底多大?日出方位角与太阳直射点的纬度到底是什么关系?本文试图运用中学地理知识,定量研究一下日出方位角问题。 图2表示太阳直射北回归线的日照情况。0号光线为直射北回归线的光线,光线①②③④⑤分别表示赤道、纬线圈A 、北极圈P 、纬线圈B 和南极圈Q 日出时刻光照情况。过P 、Q 的粗黑线椭圆为晨昏圈。 图1 二分、二至日北半球(左)与赤道地区(右)太阳视运动示意图 ③ c ′ c ′ ① ② ②′ ④ ⑤ A B N 赤道 P 1 2 3 a b c d o c ′ d ′
一、赤道地区日出方位角的大小 1、赤道夏至时的日出方位角的计算 如图2,∵太阳直射北回归线∴∠1=23°26′ 辅助线ab与赤道共面,且在晨昏圈与赤道的交点a上与赤道相切。直线ab与光线①的夹角为∠2 又∵所有太阳光线均为彼此平行的射线,∴∠2=∠1=23°26′ ∠2=23°26′的地理意义:夏至时,赤道地区日出方位为东偏北23°26′。 2、推论: 赤道地区日出方位角(日出方位偏离正东方的角度)的度数与太阳直射点的纬度度数相等。赤道地区,冬至时太阳直射23°26′S,日出方位角为23°26′,日出方位为东偏南23°26′。春秋分时太阳直射赤道,日出方位角为00,日出方位为正东。 二、其它纬度日出方位角的大小变化规律 1、夏至日其它纬度日出方位角的计算 如图2,辅助线cd、ef分别与纬线圈A、纬线圈B共面,且在地方时为6:00的经线与纬线圈A和纬线圈B的交点c、e处与纬线圈相切。 直线cd与光线②′的夹角为∠3。 ∵所有太阳光线均为彼此平行的射线,纬线圈彼此平行。 ∴∠3=∠2=23°26′。 ∠3=23°26′的地理意义:夏至时,纬线圈A上,地方时6:00太阳光线与当地纬线夹角为23°26′。同理,夏至时,纬线圈B上,地方时6:00太阳光线与当地纬线夹角为23°26′。 这并不是纬线圈A、B日出时刻的太阳方位。 光线②与纬线圈A的切线c′d′的夹角,才是纬线圈A日出时的方位角。这个角明显大于23°26′。 在北极圈P上,光线③从正北方向照射,那里的日出方位偏离正东90°。 2、推论: 赤道以外的其它地区,日出方位角的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。刚好发生极昼现象的地区偏离正东方90°,太阳从正北(或正南)方升起。 三、一道典型错题的纠正 题:下图为某地某日的太阳视运动示 意图(图3)。已知∠A=20°,∠B=65°,则 此地的地理纬度是( )。 参考答案为:45°N。 试题提供的参考解析:由∠A=20°可 知,太阳直射20°N,又由∠B=65°可知 此日该地正午太阳高度为65°。由H午 =90°- 纬度差,推出该地与直射点的纬 度差为250,所以该地纬度可能是50S或 450N。再根据正午太阳位于正南方天空, 排除50S。 其实,除了赤道地区日出方位偏离正 东方的度数与太阳直射点的纬度度数相等 外,其它地区,日出方位偏离正东方的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。该题中直射点的纬度应低于200N,该地纬度应低于450N。N S E A B W 图3
第三课 利用太阳定方位
第三课利用太阳定方位 学习目的: 1.使学生认识太阳东升西落的现象和东南西北四个基本方向。 2.培养学生利用太阳辨认方向。 教学重、难点:利用太阳辨认方向。 教学时数:1课时 教具学具准备:电筒 教学过程: 一、讲故事引入新课。 1.讲故事:小熊是个调皮的孩子。一次熊妈妈出门去了,他一个人跑出去玩。外面的世界真美呀!清澈的小河,美丽的蝴蝶,温暖的太阳……小熊玩得可高兴了。突然,一只小兔子窜了出来,小熊立刻追上去。他追呀追,左弯右拐,追了好远好远。忽然,他发现找不着回家的路了,急得哭了起来。小朋友们,你们能帮助小熊辨明方向,替他找到回家的路吗? 2.学生想办法帮助小熊找方向。 3.学生小结:辨明方向的各种方法。 4.谈话:今天我们学生其中的一种方法:利用太阳找方向。(板书:太阳和方向) 二、指导学生认识太阳东升西落的自然现象及利用太阳辨别方向。 (一)指导学生认识太阳东升西落的自然现象。 1.提问:每天早晨你到学校,太阳在校园的哪一方?这是什么方向?放学时太阳在校园的哪一方?这是什么方向? 2.学生讨论汇报。 3.提问:为什么早晨的太阳在东边?放学时太阳在西边? 4.学生讨论汇报。 5.用电筒演示太阳东升西落的现象。 6.小结:太阳东升西落这一自然现象。 (二)观察与试验 1.利用日影确定方向 2.探究原理:太阳从东方升起,到西方降落。利用太阳照射木棒成影法确定野外方向。 3.研究方法与步骤 4.研究结论
5.对研究结论的剖析 三、假设与研究方案。 (一)我们的假设 1.学生小组合作填写我们的假设。 2.假设问题汇报。 3.根据假设制定研究方案。 (二)研究的结论 1.小组根据实验的过程完成实验结论。 2.全班交流试验结论。 四、课堂小结。 1.简述本课内容。 2.如果你迷路了,在没有别人帮助的情况下,你怎么找方向? 五、板书设计 三利用太阳定方位 日影定位法指南针定位法北斗七星定位法 ······ 温馨提示:放学时分,按时回家,不在学校、路上逗留 拓展资料 用表定方向 首先是要采用24小时制,然后确定现在时间,用整点时间除以2,若有余数,则不计,只看整数,在表盘上找到整数刻度,将手表平端,以该整数时刻刻度对准太阳,则12点刻度所指的方向就是正北。比如,现在是下午3点33分,就是15点33分,以15除以2得7.5,取7,在表盘上找到7,将7对应的刻度对准太阳,则12点刻度指的方向就是正北。 在野外活动,诸如地质考察、登山、徒步旅行、探险、旅游等,为防止迷路,正确地判定所在位置和方向,必须掌握定位和侧向方法。在自然界,某些动物具有辨别方向的本能,如鸽子,人类的某些成员也具备这种能力,但绝大多数人不具备,或者只有这种潜能,因此野外确定方向主要依靠经验和工具。野外判定方向和位置的方法有许多,这里介绍几种常见的方法。
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计 解决方案: 跟踪系统驱动器接口电路 步进电机驱动电路 限位信号采集电路 太阳能是已知的最原始的能源,它干净、可再生、丰富,而且分布范围广,具有非常广阔的利用前景。但太阳能利用效率低,这一问题一直影响和阻碍着太阳能技术的普及,如何提高太阳能利用装置的效率,始终是人们关心的话题,太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了太阳能的利用效率。 跟踪太阳的方法可概括为两种方式:光电跟踪和根据视日运动轨迹跟踪。光电跟踪是由光电传感器件根据入射光线的强弱变化产生反馈信号到计算机,计算机运行程序调整采光板的角度实现对太阳的跟踪。光电跟踪的优点是灵敏度高,结构设计较为方便;缺点是受天气的影响很大,如果在稍长时间段里出现乌云遮住太阳的情况,会导致跟踪装置无法跟踪太阳,甚至引起执行机构的误动作。 而视日运动轨迹跟踪的优点是能够全天候实时跟踪,所以本设计采用视日运动轨迹跟踪方法和双轴跟踪的办法,利用步进电机双轴驱动,通过对跟踪机构进行水平、俯仰两个自由度的控制,实现对太阳的全天候跟踪。该系统适用于各种需要跟踪太阳的装置。该文主要从硬件和软件方面分析太阳自动跟踪系统的设计与实现。 系统总体设计 本文介绍的是一种基于单片机控制的双轴太阳自动跟踪系统,系统主要由平面镜反光装置、调整执行机构、控制电路、方位限位电路等部分组成。跟踪系统电路控制结构框图如图1所示,系统机械结构示意图如图2所示。
任意时刻太阳的位置可以用太阳视位置精确表示。太阳视位置用太阳高度角和太阳方位角两个角度作为坐标表示。太阳高度角指从太阳中心直射到当地的光线与当地水平面的夹角。太阳方位角即太阳所在的方位,指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方的夹角。系统采用水平方位步进电机和俯仰方向步进电机来追踪太阳的方位角和高度角,从而可以实时精确追踪太阳的位置。上位机负责任意时刻太阳高度角和方位角的计算,并运用软件计算出当前状况下俯仰与水平方向的步进电动机运行的步数,将数据送给跟踪系统驱动器,单片机接收上位机送来的数据,驱动步进电机的运行。系统具有实现复位、水平方位的调整,俯仰方向的调整,太阳的跟踪及手动校准等功能。 硬件电路设计 1跟踪系统驱动器接口电路
太阳能方位角的计算方法
太阳能方位角的计算方法 由于太阳能是一种清洁的能源,它的应用正在世界范围内快速地增长。利用太阳光发电就是一种使用太阳能的方式,可是目前建设一个太阳能发电系统的成本还是较高的,从我国现阶段的太阳能发电成本来看,其花费在太阳电池组件的费用大约为60~70%,因此,为了更加充分有效地利用太阳能,如何选取太阳电池方阵的方位角与倾斜角是一个十分重要的问题。 1.方位角 太阳电池方阵的方位角是方阵的垂直面与正南方向的夹角(向东偏设定为负角度,向西偏设定为正角度)。一般情况下,方阵朝向正南(即方阵垂直面与正南的夹角为0°)时,太阳电池发电量是最大的。在偏离正南(北半球)30°度时,方阵的发电量将减少约10%~15%;在偏离正南(北半球)60°时,方阵的发电量将减少约20%~30%。但是,在晴朗的夏天,太阳辐射能量的最大时刻是在中午稍后,因此方阵的方位稍微向西偏一些时,在午后时刻可获得最大发电功率。在不同的季节,太阳电池方阵的方位稍微向东或西一些都有获得发电量最大的时候。方阵设臵场所受到许多条件的制约,例如,在地面上设臵时土地的方位角、在屋顶上设臵时屋顶的方位角,或者是为了躲避太阳阴影时的方位角,以及布臵规划、发电效率、设计规划、建设目的等许多因素都有关系。如果要将方位角调整到在一天中负荷的峰值时刻与发电峰值时刻一致时,请参考下述的公式。至于并网发电的场合,希望综合考虑以上各方面的情况来选定方位角。方位角=(一天
中负荷的峰值时刻(24小时制)-12)×15+(经度-116)。在不同的季节,各个方位的日射量峰值产生时刻是不一样的。 2.倾斜角 倾斜角是太阳电池方阵平面与水平地面的夹角,并希望此夹角是方阵一年中发电量为最大时的最佳倾斜角度。一年中的最佳倾斜角与当地的地理纬度有关,当纬度较高时,相应的倾斜角也大。但是,和方位角一样,在设计中也要考虑到屋顶的倾斜角及积雪滑落的倾斜角(斜率大于50%-60%)等方面的限制条件。对于积雪滑落的倾斜角,即使在积雪期发电量少而年总发电量也存在增加的情况,因此,特别是在并网发电的系统中,并不一定优先考虑积雪的滑落,此外,还要进一步考虑其它因素。对于正南(方位角为0°度),倾斜角从水平(倾斜角为0°度)开始逐渐向最佳的倾斜角过渡时,其日射量不断增加直到最大值,然后再增加倾斜角其日射量不断减少。特别是在倾斜角大于50°~60°以后,日射量急剧下降,直至到最后的垂直放臵时,发电量下降到最小。方阵从垂直放臵到10°~20°的倾斜放臵都有实际的例子。对于方位角不为0°度的情况,斜面日射量的值普遍偏低,最大日射量的值是在与水平面接近的倾斜角度附近。以上所述为方位角、倾斜角与发电量之间的关系,对于具体设计某一个方阵的方位角和倾斜角还应综合地进一步同实际情况结合起来考虑。 3.阴影对发电量的影响 一般情况下,我们在计算发电量时,是在方阵面完全没有阴影的前提下得到的。因此,如果太阳电池不能被日光直接照到时,那么只有
求太阳升起的方位角度
求太阳升起的方位角 太阳从何方升起,这似乎是一个再简单不过的问题,一般人会不假思索地回答是从东方升起。从总体上来说,这也是对的,但是这种情况只能是说从全年的平均情况看是这样的。对于我们有了一定的地理知识,特别是有了地球运动、地平圈、方位角、天球概念有关知识的人来说就不能简单地这么认为了。 实际上在不同的季节、不同的纬度,太阳升起的方位角是不同的,不一定是从正东方升起。在夏季时,较高纬度地区太阳可以从东偏北50°到60°甚至更高角度升起,在西偏北同样的角度落下;冬季时可以从东偏南50°或者更多升起,在西偏南50°或以上落下。这时候我们还能说太阳是从东方升起吗?显然不能这么说。所以我们在夏天时可以说:“一轮红日从东北方升起,在西北方落下”。 那么怎样来准确计算太阳升起的方位角呢?这里我们来推导一个计算公式,把地理概念和数学中的立体几何知识结合起来就不难解决这个问题了。 例:当太阳直射北纬20度时,求北纬30度地区太阳升起的方位角。 具体解决这个问题我想可以通过下面的8个步骤来解决和说明 (1)我们可绘如下的图 图一 设观测者在北纬30度线上的某一点A点上,则D圈为A点所在的地平圈(注意地平圈一定与观测点A点到地心O的连线是垂直的,另外由图中可看出地平圈与赤道平面的夹角即二面角为60度)。 地平圈和赤道(这里理解为天赤道)的交点E为正东方(东点)、交点W为正西方(西点)。另外,N为正北、S为正南、O为地心。 (2)还是见上面的图(图一),设地平圈与北纬20°的交点为B。 由于太阳直射在北纬20°线上,随着地球的自转,总有一刻太阳会直射到B 点,光线同时指向地心O,太阳和地平圈在同一平面上,这时候A点的人太阳刚好可看到太阳升起。(为什么这样说呢?这里我们要引入天球的概念,地平圈
太阳光自动跟踪系统设计
摘要 随着以常规能源为基础的能源结构随着资源的不断耗用将越来越适应可持续发展的需要,包括太阳能在内的可再生资源将会越来越受到人们的重视。利用洁净的太阳光能,以半导体光生伏打效应为基础的光伏发电技术有这十分广阔的应用前景。 本设计尝试设计一种能够自动跟踪太阳光照射角度的双轴自动跟踪系统以提高太阳能电池的光-电转化率。该系统是以单片机为核心,利用太阳轨道公式进行太阳高度角及方位角计算,并利用计时芯片以及步进电机驱动双轴跟踪系统,使太阳能电池板始终垂直于太阳入射光线,从而提高太阳能的吸收效率。 目前本设计仅通过简单的计算公式得到的数据,对东西向进行每小时一次的角度改变,南北向进行每天一次的角度改变,再通过单片机的判断进行每晚的东西向回归控制以及每半年的南北向跟踪方向的改变控制。 由于时间及作者目前的知识限制,跟踪系统只是进行粗略的角度跟踪,有较大误差,今后如有机会再进行改进。 关键词:太阳能电池太阳照射角自动跟踪单片机步进电机
Abstract With the conventinuous consumption of resources , the conventional enenrgy-based energt strcucture has not already more and more adapt to the needs for sustainable development,sppeing-up the development of and utilization of solar energy , the photovoltaic technology based on the photovoltaic effect has a very bord application prospect. In the design , we try to design an automatic tracking system with Biaxial in order to enhance solar light - electricity conversion efficiency. The system is based on single-chip, orbit the sun elevation angle formula using the sun and calculating azimuth and take the time chip advantage of dual-axis stepper motor driven tracking system, make the solar panels perpendicular to the solar incidence line, to improve the absorption efficiency of solar energy. At present, the design of a simple formula was only for calculating the data, the east-west to the point of view will be changed once an hour, the north-outh perspective will be changed once a day, and then the MCU to return to control things through the night to determine, as well as every haif a year to track the direction of the north-south change in control. Because of the time and the current limitations of the knowledge of the author’s , the tracking system to track the point of view is rough , there are many errors , if the opportunity arised the design will be iomproved in the future. Keywords:solar cells Inrradiation angle of sun tracking automatically single-chip Stepping motor
太阳自动跟踪系统模板
绪论 21世纪是太阳能时代。在未来的40年中,人类可以实现100%的可再生能源供电。不再需要中东的石油、西伯利亚的天然气以及澳大利亚的铀。实际上,目前在我们家门口就已经获得了未来能源的载体:太阳、风力、水力、地热能,以及来自农田和林地的生物能。根据欧盟报告,2050年全球能源供给分配应当为:40%太阳能,30%生物能,巧%风能,10%水能,5%原油。报告论述了如何达到这种经济、环保、和平并且可持续的能源供给状态。跨国石油公司,比如壳牌、惠普等,已经在向着这种能源供给状态发展。 地球上的万物生长都依赖于太阳的存在,太阳给我们提供了巨大的能量源,地球上大部分的能源归根结蒂也来自于太阳。比如石油、煤炭等化石能源都是过去的动植物通过吸收太阳能不断的生长,后来这些动植物被掩埋在土壤下形成的能源,这其实是太阳能一种形式的转换,并被存储了下来,直到今天被人类开采使用。太阳能开发利用的潜力是相当巨大,据统计,全世界人们一年所使用的能量总和仅仅相当于太阳辐射到地球能量的数万分之一。在化石能源即将枯竭的未来,在未来能源方面,太阳能给人类带来新的生机。 太阳在一天中不断改变位置,这造成太阳能存在着密度低、间歇性的特点,且光照方向和度随时间不断变化。传统太阳能电池板固定在一个角度,不能时刻工作在最大效率处,而采用双轴太阳能跟踪系统的太阳能电池板在功率保持一定的情况下可以提升36% 的发电量,提高太阳能的利用率。
第一章跟踪系统的控制方案 目前光跟踪技术主要是两种方法:1.视日运行轨道跟踪方法。2.光电自动跟 踪方法。 1.1视日运行轨道跟踪 视日运行轨道跟踪技术是一种根据理论计算的太阳运行的轨迹而采取的一 种跟踪技术,根据跟踪的方位它主要分为两种:单轴跟踪和双轴跟踪。 1.1.1单轴跟踪 单轴跟踪分为三种方式:1.倾斜布置东西追踪;2.焦线南北水平布置,东西跟踪;3.焦线东西水平布置,南北跟踪。它们跟踪原理是相同,即电池阵列绕单一轴转动,其转动方向为自东向西或者南北方向,自东向西单轴跟踪方式是跟踪太阳方位角变化,驱动电池阵列转动,使电池阵列方位角与太阳方位角相同。这类跟踪方式结构简单,控制容易,在光照强度大和光照相当稳定的地方实施这类跟踪方式比较适宜。但这类跟踪方式存在一个最大缺点是除了正午这个时刻外在其他时侯不能保持电池阵列接收光辐射面与太阳光线垂直,这样大大降低了光的吸收效率,造成了能量的流失大,影响了整个光伏发电的效率。 1.1.2双轴跟踪 双轴跟踪是一种全方位的跟踪技术,它弥补了单轴跟踪的不足之处,目前视日运动轨迹的双轴跟踪主要分为两种方式:极轴跟踪方式,高度一方位角太阳轨迹跟踪方式。 极轴跟踪方式:是聚光镜的一轴指向地球北极,即与地球自转轴相平行,故称为极轴;另一轴与极轴垂直,称为赤纬轴。工作时反射镜面绕极轴运转,其转速的设定与地球自转角速度大小相同方向相反用以追踪太阳的视日运动;反射镜围绕赤纬轴作俯仰转动是为了适应赤纬角的变化,通常根据季节的变化定期调整。这种追踪方式并不复杂,但在结构上反射镜的重量不通过极轴轴线,极轴支承装置的设计比较困难。 高度一方位角太阳轨迹跟踪是一种地平坐标系统跟踪方式,它是当今比较先进的一种跟踪方式,跟踪精度较高。高度一方位角跟踪方式通过计算具体地点和具体时刻的太阳运动轨迹(高度角和方位角表示运行轨迹),根据光伏电池阵列的具体位置,先沿着垂直轴转动弥补方位角偏差,然后沿水平轴转动弥补高度角偏差,以保证电池阵列与太阳运行轨迹一致。这种方式受天气季节性影响较小属于一种理论计算轨迹程序控制跟踪方式。由于理论计算轨迹与实际运行轨道误差小,因此该跟踪方式跟踪精度较高,这种方式缺点是受跟踪系统机械影响比较大,在系统长期运行或者外力影响造成机械误差后,会造成跟踪偏差变大,影响了跟踪精度。
太阳位置计算
第24章太阳位置计算 [许剑伟于家里 2008-3-30下午] 一、低精度计算: 当计算精度要求为0.01度,计算太阳位置时可假设地球运动是一个纯椭圆,也就说忽略月球及行星摄动,计算表达如下。 设JD是儒略日数,可以用第7章表述的方法计算。T为J2000起算的儒略世纪数: T = (JD-2451545.0)/36525 计算时要保留足够的小数位数,5位小数是不够的(除非所需的太阳黄经的精度要求不高),注意,T表达为儒略世纪数,所以T误差0.00001相当于0.37日。 接下来, 太阳几何平黄经:Lo = 280°.46645 + 36000°.76983*T + 0°.0003032*T^2 (Date平分点起算) 太阳平近点角: M = 357°.52910 + 35999°.05030*T - 0°.0001559*T^2 -0°.00000048*T^3 地球轨道离心率: e = 0.0 - 0.000042037*T - 0.0000001236*T^2 太阳中间方程:C = +(1°.914600 - 0°.004817*T -0°.000014*T*T) * sin(M)+(0°.019993 - 0°.000101*T) * sin(2M)+ 0°.000290*sin(3M) 那么,太阳的真黄经是:Θ = Lo + C 真近点角是: v = M + C 日地距离的单位是"天文单位",距离表达为:R = 1.000001018 (1-e^2) / (1+e*cos(v)) ……24.5式 式中的分子部分的值变化十分缓慢。它的值是: 0.9997190 1800年 0.9997204 1900年 0.9997218 2000年 0.9997232 2100年 太阳黄经Θ可由上述的方法算出,它是Date黄道分点坐标中的真几何黄经,需通过计算地心坐标星体位置也可算出。
关于日出日落方位和物体影子方位的判断问题
关于日出日落方位和物体影子方位的判断问题 一、地球上某地一年中日出日落方位 由于地球不停的自西向东自转,地球上的人们看到太阳每天一周的东升西落现象,这种现象称为太阳的周日视运动。太阳的周日视运动轨迹平面与天赤道平行,与天轴(观测者与北极星的连线)相垂直。如图一所示 我们知道,由于地平圈的存在,我们只能观测到半个天球(即天球在地平圈上的部分)。当太阳在地平圈以上的部分运行时,即为白昼,当太阳在地平圈以下的部分运行时,即为夜晚。如图一所示 太阳经过观测者的子午圈时称为中天。经过包括天极和天顶的那半个子午圈时,太阳到达一天中最高位置,称为上中天,此时即为地方时12点;经过包括天极和天底的那半个子午圈时,太阳到达一天中最低位置,称为下中天,即为地方时0时(或24时)。 太阳经过观测者的地平圈时称为出没,也称升落。太阳从地平圈下升到地平圈上称为日出,反之称为日没。 由于黄赤交角的存在,在一年之中太阳的黄道面上的位置是不断变化的。因而每天太阳的周日视运动轨迹也不一样,从而造成每天日出日落方位及中天的高度也不相同。 由于地球的公转,太阳黄道上自西向东每天移动约1°。在一年的不同日期内,太阳的赤经、赤纬的变化,引起昼夜长度的变化。 对北半球来说,一年内只有两天,即春分和秋分,太阳由正东点日出,正西点日没,昼夜相等。从春分起,太阳的出没方位逐渐北移,夏至日到达最北点。在这段时间内,日出的时刻逐日提早,而日没的时刻逐日延迟。同时中天高度越来越高,白昼变长,黑夜缩短。夏至那天中天高度最高,白天最长。夏至以后,太阳的出没方位逐渐南移,中天高度逐渐下降。秋分以后,太阳的出没位置已在东、西点以南,昼短夜长。这个过程一直延续到冬至日为止。这时,太阳的出没位置到达最南点,白昼最短,黑夜最长。以后,太阳的出没点重新北移,到春分点时昼夜又相等,完成一年一周的运动。由于纬度不同,太阳周日视运动的变化情况也有所不同。纬度越高,夏季白天越长,冬季白天越短。极圈以北开始出现“白夜”和“黑昼”。在地球北极,则是半年白天,半年黑夜,太阳不再每天东升西落。南半球的情况和北半球完全相同,只是冬和夏、春和秋,恰好相反。在赤道上,一年四季昼夜的长短是不变的。 因而,对于全球任意点而言,在二分日时,均为正东方日出,正西方日落,昼夜平分;当太阳直射点在北半球移动时(春分到秋分),全球均为东偏北方向日出,西偏北方向