基于切平面投影的散乱数据点快速曲面重建算法
第36卷第7期2011年7月武汉大学学报#信息科学版
Geo matics and Informat ion Science of W uhan U niver sity V ol.36N o.7
July 2011
收稿日期:2011-04-28。
项目来源:国家自然科学基金资助项目(41071293)。
文章编号:1671-8860(2011)07-0757-06文献标志码:A
基于切平面投影的散乱数据点快速曲面重建算法
张剑清1 李彩林1 郭宝云1
(1 武汉大学遥感信息工程学院,武汉市珞喻路129号,430079)(2 湖北工业大学计算机学院,武汉市李家墩一村一号,430068)
摘 要:介绍了一种快速的散乱数据点曲面重建算法(切面投影三角网法),该算法不需要已知数据点的几何、拓扑信息以及是否存在边界等先验知识。算法利用邻近点集反映出的局部几何和拓扑信息,基于切平面投影方式计算每个数据点的邻域,从而完成每个数据点的局部拓扑重构。重构中物体表面数据点的降采样或不均匀采样可能会产生伪洞,因此,在重建后进行洞的检测,进而根据洞的大小来区分物体表面上实际存在的洞和重构过程中生成的伪洞,并对伪洞进行填充。利用多组散乱数据点进行重建的结果表明,切面投影三角网法高效、稳定,可以快速、自动地重构出复杂拓扑结构物体的三角网表面模型。关键词:曲面重建;散乱数据点;切平面投影;法向量计算;洞检测与填充中图法分类号:P237.3
散乱数据点的曲面重建一直以来都是计算几何和计算机图形学中一个重要的研究内容。近年来,随着计算机辅助设计与图形学的发展,散乱数据的曲面重建技术得到了广泛的研究和应用,如基于测距技术的几何模型自动生成、逆向工程以及医学成像数据的可视化等。
目前,主要有以下3种关于无组织散乱数据的三维重建方法:1构造点到物体表面的有向距离场,该距离场的零等值面即为重建曲面[1],但这种算法涉及到较为复杂的等值面抽取,重建非常耗时,且重建表面需经优化处理才能使用[2]
。o直接采用隐函数曲面或参数曲面来逼近或拟合数据点集。Foley [3]综述了从散乱点重构隐函数曲面和参数曲面的有关算法,Kazhdan [4]提出的Poisson 方法可以对复杂的模型重建出较好的结果,但是在重建后的三角网表面模型中有很多狭长的三角形,不符合Delaunay 三角形的性质。另外,Po isso n 方法采用的是近似曲面的重建方法,重建后得到的表面模型的顶点信息已经不是原始的数据点信息,对细节平滑得较为严重。?基于Delaunay 三角剖分对散乱点集进行曲面重建[5-8],取得了一定的研究成果。但由于实际物体几何形状的复杂性和三维数据采集方式的多样
性,这种方法局限于密集的采样样本集,同时存在着重建耗时、重建后需要对表面模型进行优化处理等缺陷。
本文方法在快速计算法向量算法的基础上,通过将每个数据点的邻域点投影到该点的切平面上,在二维平面上计算其Delaunay 邻域,实现了将三维空间散乱数据点转换到二维平面上进行三角构网(切面投影三角网法),避免了在三维空间中进行Delaunay 三角剖分等相当耗时的计算。
1 算法概述
切面投影三角网曲面重构算法是基于无组织的散乱数据点,不需要其他额外信息,如法向等。算法执行的结果是带有一致性法向的三角形网格,其三角网顶点为散乱数据点。该算法利用渐进式的三角剖分技术,通过将每个数据点的邻近点投影到切平面上来计算每个数据点的Delaunay 邻域,因此,该算法属于局部三角构网技术。
1)法向量计算:首先利用KD -树搜索每个数据点的k 邻域点,计算所有数据样本点的法向量,然后根据生成的图(顶点、边缘)即G(V ,E )计算最小生成树,通过遍历最小生成树依次统一法
武汉大学学报#信息科学版2011年7月
向量方向。
2)待投影点选择以及到切平面的投影计算:基于物体表面局部均匀采样的假设条件,根据一定的原则筛选每个样本点的k邻域点,将保留的k邻域点作为该样本点的待投影点,然后将待投影点投影到切平面上得到候选Delaunay邻近点。
3)Delaunay邻近点计算:根据二维数据点的三角剖分原理,在文献[9]中提出的快速计算Delaunay邻近点方法的基础上实现当前样本点的局部重构。
4)洞检测与填充:在实际情况中,往往由于降采样或不均匀采样导致重构过程中产生洞,因此需要判断哪些洞是物体表面上实际存在的洞或重构过程中生成的伪洞,并对伪洞进行填充。
2法向量计算
1)k近邻搜索。点云数据量很大时,k邻域搜索是一种非常耗时的工作。目前,常用的空间点邻域搜索算法主要有八叉树[10-11]、体素栅格法[12-14]和KD-树法[15-16]。实验证明,KD-树法相对于八叉树和体素栅格法具有效率高、速度快等优点。应用KD-树进行k邻域搜索的过程主要包括KD-树构造和KD-树查询两个步骤,采用文献[15]提供的近似最近邻ANN(approximate nearest neighbor)算法库[15]来实现k邻域的计算。
2)法向计算。对于点V,通过它的k个最近点来求出V点的近似切平面。
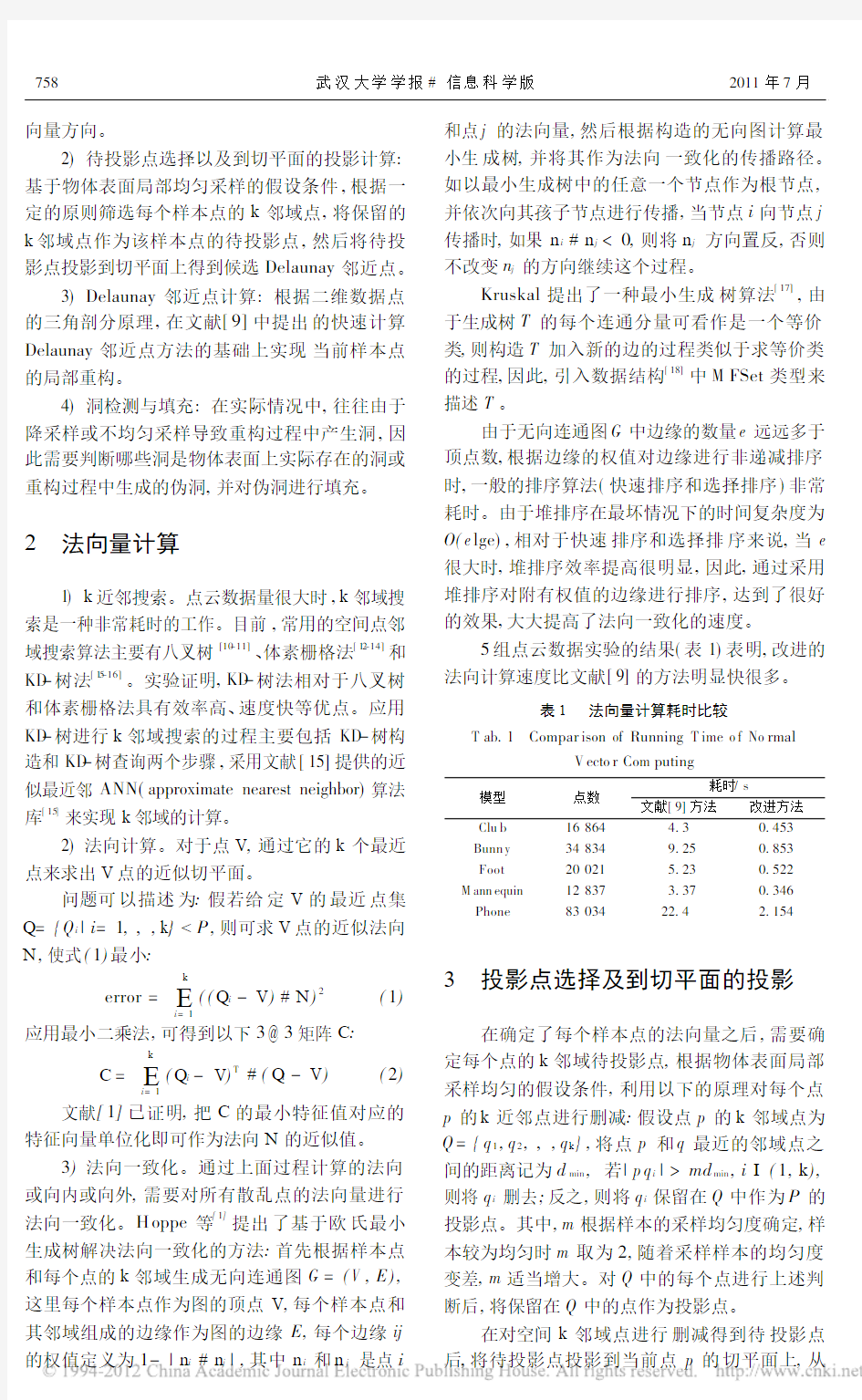
问题可以描述为:假若给定V的最近点集Q={Q i|i=1,,,k} error=E k i=1((Q i-V)#N)2(1)应用最小二乘法,可得到以下3@3矩阵C: C=E k i=1(Q i-V)T#(Q i-V)(2)文献[1]已证明,把C的最小特征值对应的特征向量单位化即可作为法向N的近似值。 3)法向一致化。通过上面过程计算的法向或向内或向外,需要对所有散乱点的法向量进行法向一致化。H oppe等[1]提出了基于欧氏最小生成树解决法向一致化的方法:首先根据样本点和每个点的k邻域生成无向连通图G=(V,E),这里每个样本点作为图的顶点V,每个样本点和其邻域组成的边缘作为图的边缘E,每个边缘ij 的权值定义为1-|n i#n j|,其中n i和n j是点i 和点j的法向量,然后根据构造的无向图计算最小生成树,并将其作为法向一致化的传播路径。如以最小生成树中的任意一个节点作为根节点,并依次向其孩子节点进行传播,当节点i向节点j 传播时,如果n i#n j<0,则将n j方向置反,否则不改变n j的方向继续这个过程。 Kruskal提出了一种最小生成树算法[17],由于生成树T的每个连通分量可看作是一个等价类,则构造T加入新的边的过程类似于求等价类的过程,因此,引入数据结构[18]中M FSet类型来描述T。 由于无向连通图G中边缘的数量e远远多于顶点数,根据边缘的权值对边缘进行非递减排序时,一般的排序算法(快速排序和选择排序)非常耗时。由于堆排序在最坏情况下的时间复杂度为O(e lge),相对于快速排序和选择排序来说,当e 很大时,堆排序效率提高很明显,因此,通过采用堆排序对附有权值的边缘进行排序,达到了很好的效果,大大提高了法向一致化的速度。 5组点云数据实验的结果(表1)表明,改进的法向计算速度比文献[9]的方法明显快很多。 表1法向量计算耗时比较 T ab.1Compar ison of Running T ime o f No rmal V ecto r Com puting 模型点数 耗时/s 文献[9]方法改进方法Clu b16864 4.30.453 Bunn y348349.250.853 Foot20021 5.230.522 M ann equin12837 3.370.346 Phone8303422.4 2.154 3投影点选择及到切平面的投影在确定了每个样本点的法向量之后,需要确定每个点的k邻域待投影点,根据物体表面局部采样均匀的假设条件,利用以下的原理对每个点p的k近邻点进行删减:假设点p的k邻域点为Q={q1,q2,,,q k},将点p和q最近的邻域点之间的距离记为d min,若|p q i|>md min,i I(1,k),则将q i删去;反之,则将q i保留在Q中作为P的投影点。其中,m根据样本的采样均匀度确定,样本较为均匀时m取为2,随着采样样本的均匀度变差,m适当增大。对Q中的每个点进行上述判断后,将保留在Q中的点作为投影点。 在对空间k邻域点进行删减得到待投影点后,将待投影点投影到当前点p的切平面上,从 758 第36卷第7期张剑清等:基于切平面投影的散乱数据点快速曲面重建算法 而得到p的候选Delaunay邻近点。投影点到切 平面的正射投影计算过程如下。 定义一个局部坐标系p-X c Y c Z c,以点p为原 点,p的法向方向作为Z c轴,Y c的切平面上的任 意向量作为X c轴,Y c通过计算向量Z c和向量Z c 的叉乘来确定。假设Z c为单位向量(z0,z1,z2), X c可以写为(x0,x1,x2)=(z1@d,-z0@d,0), 其中d=1/z20+z21。对于投影点q(x,y,z),在 局部坐标系中的坐标为q c(x c,y c,z c): (x c,y c,z c,1)=A#(x,y,z,1)T(3) 式中,A=x0x1x2-(X c#p) y0y1y2-(Y c#p) 20z1z2-(Z c#p) 0001 。 在局部坐标系下,点q到切平面上的投影坐标为(x c,y c,0),因此上式只需要计算x c和y c即可。待投影点投影到切平面后的点记为Q c= {q c,q c2,,,q c n},n为投影点的个数。 4邻近点计算与三角网构建 4.1Delaunay邻近点计算 Q c={q c1,q c2,,,q c n}称为点p的候选Delaunay三角剖分点,利用二维点三角剖分原理,从候选Delaunay三角剖分点中确定最终的Delaunay邻近点,从而实现每个点的局部重构。为了计算Delaunay邻近点,首先将Q c中所有点绕p点即局部坐标系的原点依次进行角度排序,然后根据排序的结果计算Delaunay邻近点。其过程如下。 假定q c c1,q c2,,,q c n是点p的已完成角度排序的候选Delaunay邻近点,其中q c是距离点p最近的点,所以q c1总是p的Delaunay邻近点。另外由于q c1,q c2,,,q c n是按角度进行排序的,因此是一个循环序列。选取其中连续的三个点q i,q i+1,q i+2 (i=1,,,n-1,当i=n-1时,q i+2=q0),结合图1(图中的粗线是p点的局部Vo ronoi边)可判断q i,q i+1,q i+1的中间点q i+1是否为p点的Delaunay邻近点。 如图1所示,L0是线段p q i的垂直平分线, L1是线段p q i+1的垂直平分线,L2是p q i+2的垂直平分线,I是L0和L2的交点,L I是经过I点、平行于L1的直线,M是直线段p q i+1的中点。如果p和M在L I的同侧,则q i+1是p的Delaunay邻近点,然后继续判断q i+1是否为p的Delaunay邻近点;否则,q i+1不是p的Delaunay邻近点,将q i +1从候选Delaunay邻近点集中删除,同时q i+1=q i+2,,,q n-1=q n,接下来继续判断q i+1是否为p的Delaunay邻近点。直到所有点被处理完,循环结束。 4.2三角网构建 上述计算过程可以得到每个样本点的Delaunay邻近点,并已经按照角度进行了排序。所有样本点的Delaunay邻近点如表2所示,当且仅当{P2,P3}、{P1,P3}、{P1,P2}分别为P1、P2、P3的连续Delaunay邻近点时,P1P2P3才可以构建为一个三角形。 表2Delaunay邻近点表 T ab.2T able of Delaunay N eig hbo r P oints 顶点序号顶点Delaun ay邻近点0P11,2,, 1P20,2,, 230,1,, ,,, n-1P n i,j,, 5伪洞检测与填充 由于实际的数据点总是存在降采样或者是采样不均匀等情况,导致重构后产生一些伪洞(实际物体表面上不存在的洞),因此,在后续处理中,需要自动检测出这些伪洞,并进行填充。 5.1伪洞检测 首先根据重构后的三角网信息构建点表、边-点-面表、点-边表、面-边表4个表。如图2所示, P1P2P3P4P5P6和P6P7P8为两个独立洞,检测洞的过程描述如下。 图1Delaunay邻域计算 Fig.1Delaunay N eig hbo r Calculation 图2洞的检测 Fig.2H oles Det ection 遍历已建立的边-点-面表,如果与边e i关联的面只有一个,则认为e i是边界上的边。假设将边e1 =P1P2作为第一个起始边界边,并将该边标记为已访问边,在与顶点P2关联的所有未访问边中,查找是否有满足边界条件的边,若有则继续查找,若没有则判断当前处理边与起始边界边是否邻接,如 759 武汉大学学报#信息科学版2011年7月 果邻接,则认为遍历过的边界序列组成了一个洞,反之,则继续遍历边-点-面表中未访问的边。使用该方法对图3进行遍历的结果为P 1P 2P 3P 4P 5P 6P 7P 8P 6P 1,在该边界序列中查找最近的两个重复点,并取两重复点之间的点(包含重复点中的一个点)组成的闭合边界序列作为一个独立的洞,并将这些点从边界序列中删除,在新生成的序列中继续查找独立的洞,直到边界序列中没有重复点为止,从而可以得到P 6P 7P 8和P 1P 2P 3P 4P 5P 6两个洞。由于伪洞是因降采样或采样不均匀引起的洞,因此伪洞的顶点个数都比较少。一般情况下,根据检测的洞的大小识别哪些是伪洞,洞大小的阈值可以通过人工给定,也可以通过程序计算给定。实验中伪洞大小的阈值事先给定。5.2 伪洞填充 如果伪洞的顶点个数等于3时,则直接将该三角形加入到三角网中。当伪洞顶点个数大于3时,计算组成该洞的所有顶点的重心以及平均法向,将洞的所有顶点投影到经过重心的切平面上,利用基于边界约束的二维平面构网原理,对这些投影点进行三角构网,然后将顶点的连接关系映射到三维中去,从而实现伪洞的填充,如图3 所示。 图3 洞检测与填充的结果 Fig.3 Results of H o les Detect ion and F illing 6 实验结果与结论 切面投影三角网法耗时主要包括法向量计算、切平面投影、Delaunay 邻域计算以及洞检测与填充等4个部分的时间。法向量计算时间复杂度为O (lg 3n)+O(e lg e ),切平面投影和Delaunay 邻域计算的时间复杂度都是O(n),洞检测与填充的时间复杂度为O(n H o les),因此切面投影三角网法的整体时间复杂度为O(lg 3n)+O(e lg e)+O (n)+O(n)+O(n H oles),其中,n 是顶点的数量,e 是由邻近点组成的边缘的数量,n H oles 是洞的数量。从中看出,三角网重构部分的时间复杂度 是线性阶的,与目前具有最优时间复杂度之一的 Possion 方法(时间复杂度为O(n lg n ),不包括法向量计算的时间)相比,切面投影三角网法具有明显的速度优势。 为了验证本文算法的有效性,在CPU 主频为2.0GH z 、内存为1G 的PC 机上,对多个散乱数据点模型进行了实验(图4、图5、图6(c)与图7(c)),运行时间列于表3。与目前众多方法中典型的一种方法,即Poisson 重建方法[4]进行比较,对相同的数据点模型进行实验,其中的Cat 模型和Mannequin 模型的重建结果如图7与图8所示。由于Poisson 方法需要已知数据点的法向量信息,而表3中最后一列统计的Poisson 方法耗时并没有包含其法向量计算的时间,因此,实验结果证实了切面投影三角网法运行速度要比Poisson 重建方法快很多。从表3还可以看出,切面投影三角网法能够实现对大数据量点集的快速三维重构,如Sphinx 模型。 图4 K not 模型Fig.4 K no t M odel 图5 Sphinx 模型F ig.5 Sphinx M odel 图6 Cat 模型重建结果比较 F ig.6 Compar ison of Reconstructio n Result of Cat M o del 760 第36卷第7期张剑清等: 基于切平面投影的散乱数据点快速曲面重建算法 图7 M annequin 模型重建结果比较Fig.7 Compariso n o f Reconst ruct ion Result of M annequin M o del 从图6、图7可以看出,与Po isso n 方法对附有法向量信息的数据点模型进行重建的结果相比,切面投影三角网法有以下两方面优点。1)切面投影三角网法重建后的三角网满足Delaunay 性质,且每个三角形具有一致的法向,因此基于该三角网表面模型的纹理模型更美观。 2)切面投影三角网法采用的是插值方法,因此重建后三维表面模型的顶点信息不变,其顶点是由原始的散乱数据点组成。图6(e)反映出切面投影三角网法对细节信息保留得较好。 实验结果表明,在没有任何关于数据点的几何、拓扑信息以及是否存在边界等先验知识的情况下,切面投影三角网散乱数据点曲面重构算法能够有效地、快速地对散乱点进行三角网重构。由于实际采样数据的多样性和复杂性,总是会有稀疏采样或不均匀采样的情况,因此,重建过程或多或少都会导致洞的产生,解决办法是通过检测 伪洞并对伪洞进行填充。实际上,检测伪洞的可靠性以及正确性仍然是依赖于采样的密集度和一致性,采样数据越稀疏或越不均匀,伪洞检测的可靠性和正确性都会随之下降。进一步的工作主要体现在以下两个方面:1提出更好的解决思路和方法来处理均匀性较差或采样稀疏的散乱数据点的三维表面重构。o采用局部三角构网法的整个程序流程模块化明显,因此在此基础上实现并行化处理,进一步提高大数据量三维构网的速度和效率是下一步工作的另一个研究方向。 表3 运行时间结果T ab.3 Result of Running T ime 模型点数三角形数法向计算时间/s 构建三角网时间/s 洞检测与填充时间/s 总共耗时 /s Poiss on 方法耗时/s Cat 354569970.070.090.020.18 2.63Knot 10000201460.320.460.52 1.30 3.53M an nequin 12772250910.340.370.170.88 4.90Sphinx 1027494 1994129 39.32 35.96 38.13 113.41 280.65 参 考 文 献 [1] Hoppe H,Derose T,Duchamp T ,et al.Surface Reconstruction from Unorganized Points [C ]. Proceedings of ACM Siggraph,Chicago,1992,71-78[2] H oppe H,Derose T ,Duchamp T ,et al.Mesh Optimi zation[C].Siggraph .93,Anaheim,CA,1993[3] Foley T A,Hag en H ,Nielson G M .V isualizing and M o deling U nst ructur ed Data [J].T he Visual Comput er Internatio nal Journal of Computer G raphics 1993,9(8):439-449 [4] K azhdan M ,Bo litho M ,Ho ppe H.Poisso n Surface Reconstructio n [C ].Eur og raphics Symposium on Geo metry P rocessing,Cag lia ri, Sar dinia, Italy, 2006[5] A menta N, Bern M.Surface Reco nstr uction by V or onoi F iltering [J ].Discrete Co mput Geom, 1999,2(4):481-504 [6] A menta N,Choi S,K ollur i R.T he Po wer Cr ust, U nions of Balls,and the M edial A x is T ransfor m [J].Co mput Geom:T heo ry A pplicatio ns,2001,19:127-153 [7] Dey T K ,G oswami S.T ig ht Cocone:A Water -tig ht Surface Reconstructor [J ]. Jo urnal o f Comput ing and Info rmatio n Science in Eng ineer ing,2003,3(4):302-307 [8] Cohen -Steiner D,D a F.A Gr eedy Delaunay Based Surface Reconst ruct ion A lg or ithm [J].T he V isual Comput er,2004,20(1):4-16[9] Go pi M , K r ishnan S,Silv a C T . Surface Reconstructio n Based o n Lo wer Dimensio nal L ocalized D elaunay T r iang ulation [J ].Computer G raphics F or um,2000,19(3):467-478 [10]刘春明,方漪.寻找三维散乱数据点拓扑结构的一 种算法[J].青岛大学学报(工程技术版),2003,18(3):20-24 [11]罗亚波,陈定方,肖田元.虚拟加工环境中的工件动 态建模方法研究[J].武汉大学学报#信息科学版, 761 武汉大学学报#信息科学版2011年7月 2003,28(2):238-241 [12]董洪伟.求k邻域的体素栅格算法研究[J].计算机 工程与应用,2007,43(21):52-56 [13]赵俭辉,龙成江,丁乙华,等.一种基于立方体小栅 格的k邻域快速搜索算法[J].武汉大学学报#信 息科学版,2009,34(5):615-618 [14]吕震.反求工程CAD建模中的特征技术研究[D]. 杭州:浙江大学,2003 [15]M o unt D M,Ar ya S.A N N:A L ibr ary for A ppr ox imate Near est N eig hbo r Searching[O L]. http://w https://www.360docs.net/doc/943666376.html,/~mount/A N N/,2001 [16]Bentley J L.K-d T rees for Semidy namic P oint Sets [C].T he6th A nnual A CM Symposium on Comput ational G eometr y,San F rancisco,1990 [17]Cor men T H,L eiser so n C E,Rivest R L,et al. Intro ductio n to Algo rithms,Second Edition[M]. N ew Y or k:M IT Press,2001:482-484 [18]严蔚敏,吴伟民,数据结构(C语言版)[M].北京: 清华大学出版社,1997:139-14 第一作者简介:张剑清,教授,博士生导师,现主要从事摄影测量与遥感、计算机视觉研究。代表成果为全数字化摄影测量系统VirtuoZo及5数字摄影测量学6、5摄影测量学6等。 E-m ail:jqz han g@https://www.360docs.net/doc/943666376.html, A Fast Surface Reconstruction Algorithm for Unorganized Points Based on Tangent Plane Projection ZH AN G J ianqing1L I Cailin1,2G UO Baoy un1 (1S chool of Remote Sensing an d Information Engin eering,W uhan University, 129Luoyu Road,W uhan430079,China) (2S chool of Computer S cien ce,H ubei Un iversity of T echnology,1Lijiadun,Wu han430068,China) Abstract:A fast surface reco nstr uctio n algorithm for uno rganized points,w ithout any priori know ledg e abo ut g eometry or topolog y info rmatio n o r the ex istence o f boundary o f the data, w as proposed in this paper.The algorithm used the local geom etry and topo logy inform ation obtained from the neighbo r po ints to calculate ev er y sample point.s neig hborhoo d based on tangent plane pro jection,im plementing the local to po logy reconstruction of every point. Sparse o r no n-unifo rm sam pling from the surface of a object may g enerate pseudo hole during the surface r econstruction process.So detection of holes after surface reconstruction w as required.T he real holes and the pseudo ho les can be disting uished accor ding to the size of them,and then w e filled the pseudo hole.T he ex periment result w ith multiple sets of unorg anized po ints pro ves that the algorithm presented in this paper is efficient and robust, and can reco nstr uct the tr iangular m esh mo del of objects w ith complex to po logy str ucture quickly and autom atically. Key words:surface r econstruction;uno rganized po ints;tangent plane pro jection;nor mal vector calculation;holes detectio n and filling About the first author:ZHA NG Jianqing,professor,Ph.D supervisor.His resea rch field inclu des photogram metry,remote sen sin g and computer vision.His represen ta tive ach ievemen ts are fully digital photogramm etry system Virtu oZo and literature digital photogram metry and ph otogramm etry,et a l. E-m ail:jqzhan g@su https://www.360docs.net/doc/943666376.html, 762 曲面的切平面与法线方程 设中曲面Σ的方程为F (x , y , z) = 0,函数F (x , y , z)在曲面Σ上点处可微,且 ,过点任意引一条位于曲面Σ上的曲线Γ。设其方程为,且对应于点;不全为零。由于曲线Γ在Σ上,则有 及。该方程表示了曲面上任意一条过点的曲线在该点的切线都与向量垂直,并且这些切线都位于同一平面上,这个平面就称为曲面Σ在点处的切平面. 点称为切点. 向量称为曲面Σ在点处的一个法向量。记为。 基本方法: 1、设点在曲面F(x, y, z)=0上,而F(x, y, z)在点处存在连续偏导数,且三个偏导数不同时为零,则曲面F(x, y, z)=0在点处的切平面方程为 . 法线方程为 . 2、设点在曲面z = f (x, y)上,且z = f (x, y) 在点M0 (x0, y0) 处存在连续偏导数,则该曲面在点处的切平面方程为 . 过X0的法线方程为 . 注:方法2实际上是方法1中取的情形. 3、若曲面∑由参数方程 x = x(u, v) , y = y(u, v) , z = z(u, v) 给出,∑上的点与uv平面上的点(u0 , v0)对应,而x(u , v) , y(u , v) , z(u , v)在(u0 , v0)处可微.曲面∑在点X0处的切平面方程及法线方程分别为 和 三、答疑解惑 问题:曲面∑的参数方程为x = x(u , v) , y = y(u , v) , z = z(u , v),∑上的点与u , v平面上的点(u0 , v0)对应,怎样确定∑在点X0处的法向量? 注释:设x(u , v) , y(u , v) , z(u , v) 在(u0 , v0)处可微,考虑在∑上过点X0的两条曲线. Γ1:x = x(u , v0) , y = y(u , v0) , z = z(u , v0); Γ2:x = x(u0, v) , y = y(u0 , v) , z = z(u0 , v). 它们在点X0处的切向量分别为 曲面的切平面与法线方程 令狐采学 设中曲面Σ的方程为F (x , y , z) = 0,函数F (x , y , z)在曲面Σ上点处可微,且 ,过点任意引一条位于曲面Σ 上的曲线Γ。设其方程为,且对应于点; 不全为零。由于曲线Γ在Σ上,则有 及。该方程表示了曲面上任意一条过点的曲线在该点的切线都与向量垂直,并且这些切线都位于同一平面上,这个平面就称为曲面Σ在点处的切平面. 点称为切点. 向量称为曲面Σ在点处的一个法向量。记为 。 基本方法: 1、设点在曲面F(x, y, z)=0上,而F(x, y, z)在点处存在连续偏导数,且三个偏导数不同时为零,则曲面F(x, y, z)=0在点处的切平面方程为 . 法线方程为 . 2、设点在曲面z = f (x, y)上,且z = f (x, y) 在点M0 (x0, y0) 处存在连续偏导数,则该曲面在点处的切平面方程为 . 过X0的法线方程为 . 注:方法2实际上是方法1中取的情形. 3、若曲面∑由参数方程 x = x(u, v) , y = y(u, v) , z = z(u, v) 给出,∑上的点与uv平面上的点(u0 , v0)对应,而x(u , v) , y(u , v) , z(u , v)在(u0 , v0)处可微.曲面∑在点X0处的切平面方程及法线方程分别为 和 三、答疑解惑 问题:曲面∑的参数方程为x = x(u , v) , y = y(u , v) , z = z(u , v),∑上的点与u , v平面上的点(u0 , v0)对应,怎样确定∑在点X0处的法向量? 注释:设x(u , v) , y(u , v) , z(u , v) 在(u0 , v0)处可微,考虑在∑上过点X0的两条曲线. Γ1:x = x(u , v0) , y = y(u , v0) , z = z(u , v0); Γ2:x = x(u0, v) , y = y(u0 , v) , z = z(u0 , v). 它们在点X0处的切向量分别为 当时,得∑在点X0处的法向量为 则∑在点X0处的法向量为 . 四、典型例题 例1 求椭球面x2+2y2+3z2 = 6在(1, 1, 1)处的切平面方程与法线方程. §14-6 空间曲线的切线与空间曲面的切平面 一、空间曲线的切线和法平面 概念:曲线在某点切线及法平面. 光滑曲线. 推导:已知:曲线Γ(光滑):?? ???===)()()(t z z t y y t x x βα≤≤t ),,(000z y x P 0t t = 取),,(000z z y y x x Q ?+?+?+ 则割线 z z z y y y x x x ?-=?-=?-000 切线: ) ()()(0'00'00'0t z z z t y y y t x x x -=-=- 曲线Γ在P 处的切线向量:{}ρ)(),(),('''t z t y t x T =→ 法平面: 0))(())(())((00'00'0'=-+-+-z z t z y y t y x x t x 例1:求曲线 t x 2=, 23-=t y , 22t t z -=在点(1)1=t (2))0,6,4(M 处的切 线及法平面方程. (1) )1,1,2(1-?=P t {}{}0,3,222,3,212=-==→ t P t t T 切线: 013122-=+=-z y x 即?????=-+=-0 13122z y x (严格表示) (2) 2)0,6,4(=?t M {}{}{}1,6,122,12,222,3,222-=-=-==→t m t t T 切线: 1 6614-=-=-z y x 法平面:0)6(6)4(=--+-z y x 即0406=--+z y x 例2:求曲线Γ???=++=++0 6222z y x z y x 在点)1,2,1(-M 处切线及法平面方程. 解: Γ的常数方程?????===)()(x z z x y y x x {} ) (),(,1''x z x y T =→ 地理与生物信息学院 2011 / 2012 学年第二学期 实验报告 课程名称:医学图像处理和成像技术实验名称:CT反投影滤波重建算法设计 班级学号: B090903** 学生姓名: **** 指导教师: **** 日期:2012 年 4 月 一、实验题目:CT反投影滤波重建算法设计 二、实验内容: 1.显示图像; 2.获得仿真投影数据; 3.基于获得的仿真投影数据重建图像。 三、实验要求: 1.画出Shepp-Logan头模型,显示尺寸为128×128; 2.从头模型中获得投影数据,投影数据格式为180×185; 3.基于获得的仿真投影数据重建图像,使用R-L卷积函数,重建 尺寸为128×128。 四、实验过程: 1.显示图像: ①算法实现流程: I. S-L头模型由10个位置、大小、方向、密度各异的椭圆组成, 象征一个脑断层图像。将模型中的椭圆参数写入一个p矩阵中,方便使用其中的数据,并设定所需参数。 II. 使用循环语句给像素赋值: for i=1:10 for x…. for y….. 判断点(x, y)是否在第i个椭圆内; 如是,则将第i个椭圆折射指数赋给点(x, y); end end end III. 显示仿真头模型,使用imshow(f,[])函数显示出图像。 ②实验代码: clear all; p=[0 0 0.92 0.69 pi/2 1 0 -0.0184 0.874 0.6624 pi/2 2 0.22 0 0.31 0.11 72/180*pi 0 -0.22 0 0.41 0.16 108/180*pi 4 0 0.35 0.25 0.21 pi/2 5 0 0.1 0.046 0.046 0 6 0 -0.1 0.046 0.046 0 7 -0.08 -0.605 0.046 0.023 0 8 0 -0.605 0.023 0.023 0 8 0.06 -0.605 0.046 0.023 pi/2 8]; N=256; x=linspace(-1,1,N); y=linspace(-1,1,N); f=zeros(N,N); for i=1:N for j=1:N for k=1:10 A=p(k,3); B=p(k,4); x0=p(k,1); y0=p(k,2); x1=(x(i)-x0)*cos(p(k,5))+(y(j)-y0)*sin(p(k,5)); y1=-(x(i)-x0)*sin(p(k,5))+(y(j)-y0)*cos(p(k,5)); if((x1*x1)/(A*A)+(y1*y1)/(B*B)<=1) %判断条件 f(i,j)=p(k,6); end end end end f=rot90(f); imshow(f,[]) 曲面的切平面与法线方程 设上中曲面Σ的方程为F (X , y , Z) = 0 ,函数F (X , y , Z)在曲面Σ上点'一J∣.?.'一'.∣处可微, W t) = 且1加卽龛丿,过点血任意引一条位于曲面Σ上的曲线Γ°设其 ?=Λ(∕) y=y?) 方程为A邛,且对应于点不全为零。由于曲线Γ在Σ上,则有 ? g(x吨)+卩(血吨)+叭(?F(?) 及朮LF 。该方程表示了曲面上任意一条过点「厂的曲线在该点的切线都与向量WO) 垂直,并且这些切线都位于同一平面上,这个 平面就称为曲面Σ在点:处的切平面.点.称为切点.向量二心 2 -l称为曲面Σ在点-处的一个法向量。记为G。 基本方法: 1、设点l l- ■' ■" 1■■在曲面F(x, y, z)=0上,而F(x, y, Z)在点一∣处存在连续偏导数,且三个偏导数 不同时为零,则曲面F(x, y, z)=0在点处的切平面方程为 F:g )(r-r,>+ 兀厲XJ-Λ)÷Eg(H-^) = D 法线方程为 ? _ y~y ti_ X(Jf O)=X^) = 2、设点''■' ' l?' ' ■'在曲面Z = f (x, y)上,且Z = f (x, y)在点M o (χo, y o)处存在连续偏导数,则该 曲面在点Al?, "-" - -■处的切平面方程为 -f E j Ja-心)-力(心小Xy-几)2-齢MD X = x(u, V) , y = y(u, V) , Z = z(u, V) 给出,∑上的点禺臨片九与UV平面上的点(U o , V0)对应,而X(U , V) , y(u , V) , Z(U , V)在( u o , v o)处 可微.曲面∑在点X o处的切平面方程及法线方程分别为 三、答疑解惑 问题:曲面∑的参数方程为X = X(U , V) , y = y(u , V) , Z = Z(U , V),∑±的点:'I- ■ -,'ι■ ?与u , V平面上的点(U o , VO)对应,怎样确定∑在点X o处的法向量? 注释:设X(U , V) , y(U , V) , Z(U , V)在(U o , VO)处可微,考虑在∑上过点X o的两条曲线. Γ i: X = X(U , V o) , y = y(U , V o) , Z = Z(U , V o); Γ 2 : X = X(U o , V) , y = y(U o , V) , Z = Z(UO, V). 它们在点X o处的切向量分别为 ξ=C?冲"?(?, ?(?,?)) E■(兀(知岭h H(M e Mh 久(%%)) 过X o的法线方程为 注:方法2实际上是方法 1 中取..'l--λ.'<-的情形 3、若曲面∑由参数方程 第二章 曲面的表示与曲面论 第三节 曲面的切平面和法线、光滑曲面 1、 平面曲线的切线与法线 设平面曲线的方程为 0),(=y x F , ),(0 y x P 是其上一定点。在该点的切线斜率为 ) ,() ,()(00000y x F y x F x y y x ''-='. 从而曲线过点),(000y x P 的切线方程为 ) () ,() ,(000000x x y x F y x F y y y x -''- =-, 即0 (,)()(,)()0x y F x y x x F x y y y ''-+-= ,(1) 法线方程为 000000 (,)()(,)()0y x F x y x x F x y y y ''---=,(2) 例1、 求笛卡叶形线09)(23 3 =-+xy y x 在点)1,2(处的切线与法线. 解 xy y x y x F 9)(2),(3 3 -+=, y x F x 962 -=',x y F y 962 -='. 12)1,2(,15)1,2(-='='y x F F , 得到 切线方程 0)1(4)2(5=---y x ,即645=-y x ; 法线方程 0)1(5)2(4=-+-y x ,即1354=+y x .如图(1)所示. 图(1) 2、 空间曲线的切线与法平面 设空间曲线L 的方程为 )(),(),(t z z t y y t x x ===,βα≤≤t . 定点L z y x P ∈),,(0 , )(),(),(0 t z z t y y t x x ===, 动点 L z z y y x x P z y x P ∈?+?+?+=),,(),,(0 . 动割线P P 0 的方程为 t z z z t y y y t x x x ??-=??-=??-0 00, 当0→?t 时,动点P 沿曲线无限接近定点0P , 达到动割线P P 0 的极限位 置l : 0 ()()() x x y y z z x t y t z t ---==''' ,(3) 称之为曲线L 在点0 P 的切线. 其方向向量为 0 {(),(),()}x t y t z t τ'''= 。 一、 平行束反投影重建算法 平行束 重建采用的是平移加 旋转的扫描方式,如图所示,射线源在某一角度下水平移动,将物体全部 照射后旋转一角度,如此重复,在这个过程中探测器相应地运动以接收X 射线。 1、反投影重建算法的物理概念: 断层平面中某一点的密度值可以看作是这一平面内所有经过该点的射线的投影值之和(的均值)。 整幅重建图像可以看作是所有方向下的投影累加而成。 射线标号示于图中,像素值(代表密度)分别1x ,2x ,3x ,4x , 赋值如下: 15x =,20x =,32x =,418x = 根据投影的定义(某条射线投影值为该条射线穿过的所有的像素值之和),每条射线的投影i p (1,2 i =)为: 1215p x x =+=, 23420p x x =+=,3137p x x =+= 42418p x x =+=, 532p x ==, 61423p x x =+= 720p x == 根据反投影重建算法的物理意义,重建图像中各像素,得到: 113635x p p p =++=,214723x p p p =++=, 323529x p p p =++=,424661x p p p =++= (a) 原图像像素值 (b)反投影重建后图像 (c)求平均后图像 图 反投影示例 重建后的图像如图(b)所示,可以看出原图像中像素值不为零的点反投影重建后仍较突出,但原图中像素值为零的点,经反投影重建后不再为零,即有伪迹。有时为了使重建后图像的像素值更接近于原图的像素值,在求反投影时,把数据除以投影的数目(即射线数), 图 平行束平移加旋转 图 断层像素值和射线 曲面的切平面与法线 设有光滑曲面0 ),,(:=Σz y x F 通过其上定点),,(000z y x M 任意引一条光滑曲线],[),(),(),(:βα∈===Γt t z z t y y t x x )(),(),(000t z t y t x ′′′对应点M , 0t t =则Γ在M 的切向量为:)} (),(),({000t z t y t x T ′′′= 切线方程 ()()() 00 0000t z z z t y y y t x x x ′?= ′?=′?Γ T M 设且不全为0, 证明:由于∑上过点M 的任何曲线在该点的切线都在同一平面上. 此平面称为∑在该点的切平面.下面证明: )(),(),(:t z z t y y t x x ===Γ在∑上.故 ))(),(),((=t z t y t x F 两边在0t t =处求导,得 ()()()()()()0 ,,,,,,000000000000=′+′+′t z z y x F t y z y x F t x z y x F z y x 令: )},(),(),({000t z t y t x T ′′′= ()()()} ,,,,,,,,{000000000z y x F z y x F z y x F n z y x = 有:n T ⊥ 曲面∑在点M 的法向量()()()} ,,,,,,,,{000000000z y x F z y x F z y x F n z y x = ()()()()()()0 ,,,,,,000000000000=?+?+?z z z y x F y y z y x F x x z y x F z y x 过M 点且垂直于切平面的称为曲面∑在点M 的法线.法线方程: ()()() 0000 00000000,,,,,,z y x F z z z y x F y y z y x F x x z y x ?= ?=?切平面方程: 文档CT图像滤波反投影重建算法的研究[宝典] 西北工业大学学位论文知识产权声明书本人完全了解学校有关保护知识产权的规定,即:研究生在校攻读学位期间论文工作的知识产权单位属于西北工业大学。学校有权保留并向国家有关部门或机构送交论文的复印件和电子版。本人允许论文被查阅和借阅。学校可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。同时本人保证,毕业后结合学位论文研究课题再撰写的文章一律注明作者单位为西北工业大学。保密论文待解密后适用本声明。学位论文作者签名::《~~~塑, 指导教师签名。,况订年弓月多,日聊年岁月歹口日西北工业大学学位论文原创性声明秉承学校严谨的学风和优良的科学道德,本人郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。尽我所知,除文中已经注明引用的内容和致谢的地方外,本论文不包含任何其他个人或集体己经公开发表或撰写过的研究成果,不包含本人或其他已申请学位或其他用途使用过的成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式表明。本人学位论文与资料若有不实,愿意承担一切相关的法律责任。学位论文作者签名网年;月如日西北〕,业大学硕士学位论文第一章绪论第一章绪论本章首先概述了图像重建和,,技术的基本概念及图像重建方法的分类,然后介绍了,,的发展及国内外研究现状,最后阐明了本文的研究目的与意义、主要工作和内容安排。,(,图像重建与,,技术概述由物体的二维截面或断面向该平面内的各个方向作投影,可获得一系列一维投影函数。由这些一维投影函数来重建该二维截面则称为图像重建。该技术是随着计算机技术的进步而发展起来并获得广泛应用的图像处理技术,其最典型的应用是医学上的计算机断层成像术(;,,,,,,, ,,,,鲫,,或;;胁,,,,,,,,,(,,,,肿,,,),简称为;,技术。它用于获取人体头颅、心肺、腹部等内部器官的二维断层 西北工业大学学位论文知识产权声明书本人完全了解学校有关保护知识产权的规定,即:研究生在校攻读学位期间论文工作的知识产权单位属于西北工业大学。学校有权保留并向国家有关部门或机构送交论文的复印件和电子版。本人允许论文被查阅和借阅。学校可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。同时本人保证,毕业后结合学位论文研究课题再撰写的文章一律注明作者单位为西北工业大学。保密论文待解密后适用本声明。学位论文作者签名::《!!!塑L指导教师签名。>况订年弓月多D日聊年岁月歹口日西北工业大学学位论文原创性声明秉承学校严谨的学风和优良的科学道德,本人郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。尽我所知,除文中已经注明引用的内容和致谢的地方外,本论文不包含任何其他个人或集体己经公开发表或撰写过的研究成果,不包含本人或其他已申请学位或其他用途使用过的成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式表明。本人学位论文与资料若有不实,愿意承担一切相关的法律责任。学位论文作者签名网年;月如日西北〕=业大学硕士学位论文第一章绪论第一章绪论本章首先概述了图像重建和CT技术的基本概念及图像重建方法的分类,然后介绍了CT的发展及国内外研究现状,最后阐明了本文的研究目的与意义、主要工作和内容安排。1.1图像重建与CT技术概述由物体的二维截面或断面向该平面内的各个方向作投影,可获得一系列一维投影函数。由这些一维投影函数来重建该二维截面则称为图像重建。该技术是随着计算机技术的进步而发展起来并获得广泛应用的图像处理技术,其最典型的应用是医学上的计算机断层成像术(computedT0mo鲫hy或cc胁puterized.Ibmo肿pby),简称为cT技术。它用于获取人体头颅、心肺、腹部等内部器官的二维断层图像(故亦称断层摄影技术),对于x射线放射诊断是一个重大突破,具有深远的实际意义,因而受到普遍的重视。1.1.1图像重建图像重建是图像处理中一个重要研究分支,是指根据对物体的探测获取的数据来重新建立图像,其重要意义在于获取被检测物体内部结构的图像而不对物体造成任何物理上的损伤。由于具备无损检测技术的显著优点,它在各个不同的应用领域中都显示出独特的重要性。例如:在医疗放射学、核医学、电子显微、无线电雷达天文学、光显微和全息成像学及理论视觉等领域都多有应用。在上述的众多领域中,图像重建在医学方面的应用最为显著。它大大丰富了对于人体内部器官进行无损检测的方法和手段,为疾病的早期正确诊断提供了科学的、准确的依据。根据原始数据获取方法及重建原理的不同可分为如下几种:发射断层重建成像(Emj醛i∞computcdTomography,Ec砷,透射断层重建成像frfansmissioncc吼plItcdTomo掣aphy,1∞,反射断层重建成像(Reflecti∞Cc粕puted劢衄ography,RcI)及核磁共振重建成像(Ma印eticRes∞卸cclIIIaging,MRn。西北工业大学硕士学位论文第一章绪论1.1.2CT技术在各种图像重建算法中,计算机断层成像术即CT技术占有重要的地位。cT技术的功能是将人体中某一薄层中的组织分布情况,通过射线对该薄层的扫描、检测器对透射信息的采集、计算机对数据的处理,并利用可视化技术在显示器或其他介质上显示出来。1.1.3图像重建的方法图像重建是CT技术中的一个重要问题。它的实质是按照采集后的数据,求解图像矩阵中象素,然后重新构造图像的过程;而图像矩阵的求解由计算机完成。图像重建问题的求解方法根据其特点可分为2大类。第1类是变换重建方法f也叫解析法呐,其特点是先在连续域解析处理,最后离散化以利用计算机计算。其中又可分成傅里叶反变换重建法和滤波(或卷积)反投影重建法。第2类是级数展开重建法12j13l(也叫代数重建法、迭代算法、优化技术等),其特点是从开始就离散化进行分析,从而直接得到数值解。另外还有将变换法和级数展开法相结合的综合方法,如:迭代变换法、迭代重建重投影、角谐函数重建法和正交多项式展开重建。变换法的突出优点是实现简单,速度快,对足够精确的投影数据能获得很好的重建质量。因此目前实用CT系统中,尤其是医用cT系统中广泛采用变换法,特别是滤波反投影类型的算法来进行图像重建。变换法在技术上有两个主要的限制:(1)噪声特性不好。因为变换法是基于解析求反公式的闭合形式,要求投影数据是精确的。对于数据中的噪声,可以通过滤波步骤来适当解决。如果我们能在投影数据输入给变换法之前,将影响投影数据不精确性的诸多物理因素进行足够的校正,则便可以认为投影数据是相当准确的,从而得到满意的重建。(乃正因为变换法基于解析求反公式的闭合形式,所以变换法的简单与复杂强烈地依赖于数据采集扫描方 曲线、曲面积分方法小结 求曲线、曲面积分的方法与技巧 一.曲线积分的计算方法与技巧 计算曲线积分一般采用的方法有:利用变量参数化将曲线积分转化为求定积分、利用格林公式将曲线积分转化为二重积分、利用斯托克斯公式将空间曲线积分转化为曲面积分、利用积分与路径无关的条件通过改变积分路径进行计算、利用全微分公式通过求原函数进行计算等方法。 例一.计算曲线积分?+L xdy ydx ,其中L 是圆)0(222>=+y x y x 上从原点 )0,0(O 到)0,2(A 的一段弧。 本题以下采用多种方法进行计算。 解1:A O )的方程为?????-==, 2, 2 x x y x x L 由,A O →x 由,20→.212 dx x x x dy --= ? +L xdy ydx dx x x x x x x ?--+-=2 02 2 ]2)1(2[ dx x x x x dx x x x x x x x ? ? --+----=20 2 20 2 2 2)1(2)1(220 .00442=--= 分析:解1是利用变量参数化将所求曲线积分转化为求定积分进行计算的,选用的参变量为.x 因所求的积分为第二类曲线积分,曲线是有方向的,在这种解法中应注意参变量积分限的选定,应选用对应曲线起点的参数的起始值作为定积分的下限。 解2:在弧A O ) 上取)1,1(B 点, B O )的方程为 ?? ???--==,11,2y x y y L 由,B O →y 由 ,10→.12 dy y y dx -= A B ) 的方程为 ?????-+==, 11,2y x y y L 由,A B →y 由 ,01→.12 dy y y dx -- = 卷积反投影图像重建 1 反投影重建基本介绍[1] 设待重建图像为),(y x a ,它的二维傅氏变换为^ 1 2 (,)(,)A A ωωρφ=。根据中心切片定理,^ (,)A ρφ可通过),(y x a 在不同视角φ下的投影()r p x φ的 一维傅氏变换求得。即: 待建图像: 12^ 1212()1212 2 ^2cos()0 2cos()02cos()0(,)(,)(,)1(,)4(,)(,)(,)i x y i r i r i r a r a x y F A A e d d A e d d P e d d d P e d ωωππρθφπ πρθφπ πρθφθωωωωωωπρφρρφ ρφρρφ φρρφρ -∞∞ +-∞-∞ ∞--∞ ∞ --∞ ∞ --∞======?? ??? ? ?? [] (1.1) 因为cos()r x r θφ=-,所以有: 122(cos sin )22cos()r x y x y x r ωωπρφφπρπρθφ+=+==- 同时: 12d d J d d ωωρφ= 11222//2cos 2sin 4//2sin 2cos J ωρωφπφ πρφ πρωρωφπφ πρφ ????-= = =???? (1.2) 先来看该式的第二个积分: [] 22cos() cos()cos()cos()(,)(,)|()(,)|(,)|cos(),r r r r i x i r x r r r x r r x r P e d P e d h x p x g x g r πρπρθφθφθφθφρρφρρρφρ φφθφφ∞ ∞ -=--∞ -∞ =-=-==*==-? ? (1.3) 式中:(,)()(,)r r r g x h x p x φφ=* (1.4) ^ 121(,)(,)()()(,)r A A F p x P P φφωωρφρρφ??====?? 8.5.2曲面的切平面与法线 过曲面Σ上一点M,在曲面Σ上的曲线 有无数多条,每一条曲线点M处都有一条 切线,在下面的讨论中将会发现,在一定 的条件下,这些切线位于同一平面,我们 称这个平面为曲面Σ在点M处的切平面。 设曲面Σ的方程为F(x,y,z)=0,M(x0, y0,z0)是曲面上一点,函数F(x,y,z)在 点M处有连续的偏导数,且三个偏导数不 全为零,另设曲线Γ是过点M且在曲面Σ 上的任意一条曲线,它的方程为 t=t0是点M0所对应的参数 , 不全为零。 由于曲线Γ在曲面Σ上,于是曲线Γ上 任意一 点的坐标满足曲面Σ的 方程,即有恒等式 图8-22 又由于函数F(x,y,z)在点M处有连续的偏导数,函 数 在t=t0处可导,所以复合函 数在t=t0 处可导,且全导数为 恒等式=0两边在t0处对t求全导数,有 上式说明向量 与向量 垂直。向量是曲线Γ在点M处的切向量,故曲线Γ在点M处 的切线与向量垂直,由曲线Γ的任意性知,所有过点M,且在曲 面Σ上的曲线在M处的切线都与向量垂直,也就是这些切线都在 以向量为法向量,并通过点M的平面上。所以,曲面Σ在点M处的切平面方程为 过点M(x0,y0,z0)且垂直于该点处的切平面的直线称为曲面Σ在点M处的法线,显然,切平面的法向量就是法线的方向向量,所以曲面Σ在点M处的法线方程为 如果曲面Σ的方程为z=f(x,y),则只需设 那么曲面Σ的方程就可化成F(x,y,z)=0的形式,而且 , 此时曲面Σ在点M0(x0,y0,z0)处的切平面方程为 法线方程为 例1:求曲面在点M(3,1,1)处的切平面方程和法线方程。 解: 例2:求圆锥面在点M(1,0,1)处的切平面方程和法线方程。 解: 例3:在椭圆抛物面上求一点,使它的切平面与平 面平行,并求该点的切平面及法线方程。 解: 曲面的切平面与法线方程 设*「中曲面工的方程为F(x ,z) = 0,函数F ( x , y , Z)在曲面工上点益-氐丹,环) Wo)= 处可微,且酬(血)前(血)萌(血) # o ,过点」任意引一条位于曲面工上的曲线 r。设其方程为 X ■戎\ * y = XO mW),且f ■冷对应于点-'■ 不全为零。由于曲线『在工 上,则有< -「及□化(孟)确,)+匚僦)HG+胃(兀玄如 。该方程表示 了曲面上任意一条过点的曲线在该点的切线都与向量垂直,并且这些切线都位于同一平面上, 这个平面就称为曲面工在点■'处的切平面.点1 .称为切点.向量」丁 J _1称为曲面工在点].处 的一个法向量。记为厂: 基本方法: 1、设点?-1'■?"在曲面F(x, y, z)=0上,而F(x, y, z)在点‘丨处存在连续偏导数,且三个偏 导数不同时为零,则曲面F(x, y, z)=0在点丄1处的切平面方程为 忙(局)(“忌)4 兀(EXF -刃)+ £(兀-x,)-o 法线方程为 尺%,厂£3■厂£(兀) 2、设点f-' 1' -1'■-在曲面z = f (x, y)上,且z = f (x, y)在点M(x。,y。)处存在连续偏导数, 则该曲面在点上处的切平面方程为 过X的法线方程为 -工外片)-工知片)】 注:方法2实际上是方法1中取■'■ ■1■ ' '■'- ■■' I的情形. 3、若曲面刀由参数方程 x = x(u, v) , y = y(u, v) , z = z(u, v) 给出,刀上的点''''■'-与uv平面上的点(LP, v。)对应,而x(u , v) , y( u , v) , z( u , v)在(u。, v o)处可微.曲面刀在点X)处的切平面方程及法线方程分别为 三、答疑解惑 问题:曲面刀的参数方程为x = x(u , v) , y = y( u , v) , z = z( u , v),刀上的点':_i 1与u , v平面上的点(u o, v o)对应,怎样确定刀在点X)处的法向量? 注释: :设x( u ,v),y(u , v),z(u ,v)在(s, v o)处可微,考虑在刀上过点X o的两条曲线 『1: x = x(u ,v o),y = y(u ,v o),z = z( u , v o); 『2:x = x(u o,v),y = y(u o ,v),z = z( u o , v). 它们在点X。处的切向量分别为 \=a:糾冲,y:(埠咻£(知耳)) E ■(兀(如岭竄和4心知比)) 曲面立体表面点的投影 ————————————————————————————————作者: ————————————————————————————————日期: 《机械制图》课程教案 《第三章立体表面交线的投影作图§3-1 立体表面上点的投影》教案 授课教师:杨秋颖班级:机加14-1 时间:2014.9.4 课题:曲面立体的投影及表面取点 教学方法:讲授法 教学目的:1、讲解曲面立体的种类及其三视图画法 2、讲解在圆柱和圆锥体表面取点、取线的作图方法 目的要求:1、能够熟练掌握圆柱和圆锥体的三视图画法 2、能够熟练运用利用点所在的面的积聚性法和辅助线法在曲面立体表面取点、取线 教学重点:1、曲面立体的种类及其三视图画法。 2、在曲面立体表面取点、取线的作图方法 教学难点:在圆柱和圆锥体表面取点、取线的作图方法 【教学媒体和资源利用】多媒体课件 【教学过程设计】组织教学—引入—新授—小结—学生练习—作业 教学过程备注组织教学 目的是让学生进入学习状态。 复习旧课 结合作业复习平面立体表面取点方法 引入 曲面立体的投影及表面取点 ?曲面立体的曲面是由一条母线(直线或曲线)绕定轴回转而形成的。在投影图上表示曲面立体就是把围成立体的回转面或平面与回转面表示出来。 新授 一、圆柱 圆柱表面由圆柱面和两底面所围成。圆柱面可看作一条直母线AB围绕与它平行的轴线OO1回转而成。圆柱面上任意一条平行于轴线的直线,称为圆柱面的素线。 (1)圆柱的投影 画图时,一般常使它的轴线垂直于某个投影面。 举例:如图3-4(a)所示,圆柱的轴线垂直于侧面,圆柱面上所有素线都是侧垂线,因此圆柱面的侧面投影积聚成为一个圆。圆柱左、右两个底面的侧面投影反映实形并与该圆重合。两条相互垂直的点划线,表示确定圆心的对称中心线。圆柱面的正面投影是一个矩形,是圆柱面前半部与后半部的重合投影,其左右两边分别为左右两底面的积聚性投影,上、下两边a′a′1、b′b′1分别是圆柱最上、最下素线的投影。最上、最下两条素线AA1、BB1是圆柱面由前向后的转向线,是正面投影中可见的前半圆柱面和不可见的后半圆柱面的分界线,也称为正面投影的转向轮廓素线。同理,可对水平投影中的矩形进行类似的分析。课件展示课件展示 第六节 空间曲线的切线与空间曲面的切平面 一、空间曲线的切线与法平面 设空间的曲线C 由参数方程的形式给出:?? ? ??===)()()(t z z t y y t x x ,),(βα∈t . 设),(,10βα∈t t ,)(),(),((000t z t y t x A 、))(),(),((111t z t y t x B 为曲线上两点,B A ,的连线AB 称为曲线C 的割线,当A B →时,若AB 趋于一条直线,则此直线称为曲线C 在点A 的切线. 如果)()()(t z z t y y t x x ===,,对于t 的导数都连续且不全为零(即空间的曲线C 为光滑曲线),则曲线在点A 切线是存在的.因为割线的方程为 ) ()() ()()()()()()(010010010t z t z t z z t y t y t y y t x t x t x x --=--=-- 也可以写为 010********)()() ()()()()()()(t t t z t z t z z t t t y t y t y y t t t x t x t x x ---=---=--- 当A B →时,0t t →,割线的方向向量的极限为{})(),(),(000t z t y t x ''',此即为切线的方向向量,所以切线方程为 ) () ()()()()(000000t z t z z t y t y y t x t x x '-='-='-. 过点)(),(),((000t z t y t x A 且与切线垂直的平面称为空间的曲线C 在点 )(),(),((000t z t y t x A 的法平面,法平面方程为 ))(())(())((00'00'00'=-+-+-z z t z y y t y x x t x 如果空间的曲线C 由方程为 )(),(x z z x y y == 且)(),(0' 0'x z x y 存在,则曲线在点)(),(,(000x z x y x A 的切线是 ) () ()()(100000x z x z z x y x y y x x '-= '-=- 法平面方程为 第4章截切体与相贯体的投影 前面提到:各种形状的机件虽然复杂多样,但都是由一些简单的基本体经过叠加、切割或相交等形式组合而成的。那么,基本体被平面截切后的剩余部分,就称为截切体。两基本体相交后得到的立体,就叫相贯体。它们由于被截切或相交,会在表面上产生相应的截交线或相贯线。了解它们的性质及投影画法,将有助于我们对机件形状结构的正确分析与表达。 4.1 截切体 4.1.1截切体的有关概念及性质 如图4-1示,正六棱柱被平面P截为两部分,其中用来截切立体的平面称为截平面;立体被截切后的部分称为截切体;立体被截切后的断面称为截断面;截平面与立体表面的交线称为截交线。 图4-1 立体的截交线 尽管立体的形状不尽相同,分为平面立体和曲面立体,截平面与立体表面的相对位置也各不相同,由此产生的截交线的形状也千差万别,但所有的截交线都具有以下基本性质: 1.共有性截交线是截平面与立体表面的共有线,既在截平面上,又在立体表面上,是截平面与立体表面共有点的集合。 2.封闭性由于立体表面是有范围的,所以截交线一般是封闭的平面图形(平面多边形或曲线)。 根据截交线的性质,求截交线,就是求出截平面与立体表面的一系列共有点,然后依次连接即可。求截交线的方法,即可利用投影的积聚性直接作图,也可通过作辅助线的方法求出。 4.1.2平面截切体 由平面立体截切得到的截切体,叫平面截切体。 因为平面立体的表面由若干平面围成,所以平面与平面立体相交时的截交线是一个封闭的平面多边形,多边形的顶点是平面立体的棱线与截平面的交点,多边形的每条边是平面立体的棱面与截平面的交线。因此求作平面立体上的截交线,可以归纳为两种方法: (1)交点法:即先求出平面立体的各棱线与截平面的交点,然后将各点依次连接起来,即得截交线。 连接各交点有一定的原则:只有两点在同一个表面上时才能连接,可见棱面上的两点用实线连接,不可见棱面上的两点用虚线连接。 (2)交线法:即求出平面立体的各表面与截平面的交线。 一般常用交点法求截交线的投影。两种方法不分先后,可配合运用。 求平面立体截交线的投影时,要先分析平面立体在未截割前的形状是怎样的,它是怎样被截割的,以及截交线有何特点等,然后再进行作图。 具体应用时通常利用投影的积聚性辅助作图。 1.棱柱上的截交线 【例4-1】如图4-2a所示,求作五棱柱被正垂面Pv截断后的投影。 解: (1)分析 截平面与五棱柱的五个侧棱面均相交,与顶面不相交,故截交线为五边形ABCDE。 (2)作图,如图4-2a所示 1)由于截平面为正垂面,故截交线的V面投影a′b′c′d′e′已知;于是截交线的H面投影abcde亦确定; 2)运用交点法,依据“主左视图高平齐”的投影关系,作出截交线的W面投影a″b″c″d″e″; 3)五棱柱截去左上角,截交线的H和W投影均可见。截去的部分,棱线不再画出,但有侧棱线未被截去的一段,在W投影中应画为虚线。 (3)检查、整理、描深图线,完成全图,如图4-2b所示。 第二章 曲面的表示与曲面论 第三节 曲面的 切平面和法线、 光滑曲面 1、 平面曲线的切线与法线 设平面曲线的方程为 0),(=y x F , ),(0 y x P 是其上一定点。在该点的切线斜率为 ) ,() ,()(00000y x F y x F x y y x ''- ='. 从而曲线过点),(000y x P 的 切线方程为 ) () ,() ,(000000x x y x F y x F y y y x -''-=-, 即0 (,)()(,)()0x y F x y x x F x y y y ''-+-= ,(1) 法线方程为 (,)()(,)()0y x F x y x x F x y y y ''---=, (2) 例1、 求笛卡尔叶形线09)(23 3 =-+xy y x 在点)1,2(处的切线与法线. 解 xy y x y x F 9)(2),(3 3 -+=, y x F x 962 -=',x y F y 962 -='. 12)1,2(,15)1,2(-='='y x F F , 得到 切线方程 0)1(4)2(5=---y x ,即645=-y x ; 法线方程 0)1(5)2(4=-+-y x ,即1354=+y x .如图(1)所示. 图(1) 2、 空间曲线的切线与法平面 设空间曲线L 的方程为 )(),(),(t z z t y y t x x ===,βα≤≤t . 定点L z y x P ∈),,(0 , )(),(),(0 t z z t y y t x x ===, 动点 L z z y y x x P z y x P ∈?+?+?+=),,(),,(0 . 动割线P P 0 的方程为 t z z z t y y y t x x x ??-=??-=??-0 00, 当0→?t 时,动点P 沿曲线无限接近定点0P , 达到动割线P P 0 的极限位 置l : 0 ()()() x x y y z z x t y t z t ---==''' ,(3) 称之为曲线L 在点0 P 的切线. 其方向向量为 曲面的切平面与法线 方程 曲面的切平面与法线方程设中曲面Σ的方程为F (x , y , z) = 0,函数F (x , y , z)在曲面Σ上点处可微,且,过点任意引一条位于曲面Σ上的曲线Γ。设其方程为,且对应于点;不全为零。由于曲线Γ在Σ上,则有及。该方程表示了曲面上任意一条过点的曲线在该点的切线都与向量垂直,并且这些切线都位于同一平面上,这个平面就称为曲面Σ在点处的切平面. 点称为切点. 向量称为曲面Σ在点 处的一个法向量。记为。 基本方法: 1、设点在曲面F(x, y, z)=0上,而F(x, y, z)在点处存在连续偏导数,且三个偏导数不同时为零,则曲面F(x, y, z)=0在点处的切平面方程为 . 法线方程为 . 2、设点在曲面z = f (x, y)上,且z = f (x, y) 在点M0 (x0, y0) 处存在连续偏导数,则该曲面在点处的切平面方程为 . 过X0的法线方程为 . 注:方法2实际上是方法1中取的情形. 3、若曲面∑由参数方程 x = x(u, v) , y = y(u, v) , z = z(u, v) 给出,∑上的点与uv平面上的点(u0 , v0)对应,而x(u , v) , y(u , v) , z(u , v)在(u0 , v0)处可微.曲面∑在点X0处的切平面方程及法线方程分别为 和 三、答疑解惑 问题:曲面∑的参数方程为x = x(u , v) , y = y(u , v) , z = z(u , v),∑上的点与u , v平面上的点(u0 , v0)对应,怎样确定∑在点X0处的法向量? 注释:设x(u , v) , y(u , v) , z(u , v) 在(u0 , v0)处可微,考虑在∑上过点X0的两条曲线. Γ1:x = x(u , v0) , y = y(u , v0) , z = z(u , v0); Γ2:x = x(u0, v) , y = y(u0 , v) , z = z(u0 , v). 它们在点X0处的切向量分别为曲面的切平面和法线方程
曲面的切平面与法线方程
空间曲线的切线与空间曲面的切平面
CT反投影滤波重建算法设计(汇编)
曲面的切平面与法线方程
第二章第三节曲面的切平面和法线计算例题
平行束反投影重建
3曲面的切平面与法线
文档CT图像滤波反投影重建算法的研究[宝典]
文档CT图像滤波反投影重建算法的研究
曲线、曲面积分方法小结
卷积反投影重建(二维)
852 曲面的切平面与法线讲解
曲面的切平面与法线方程
曲面立体表面点的投影
空间曲线的切线与空间曲面的切平面
(完整版)机械制图第4章截切体与相贯体的投影
曲面的切平面和法线计算例题
曲面的切平面与法线方程讲课讲稿