旋转变压器(角度传感器)的基本原理 Encoder Resolver
Document Information
1. Introduction
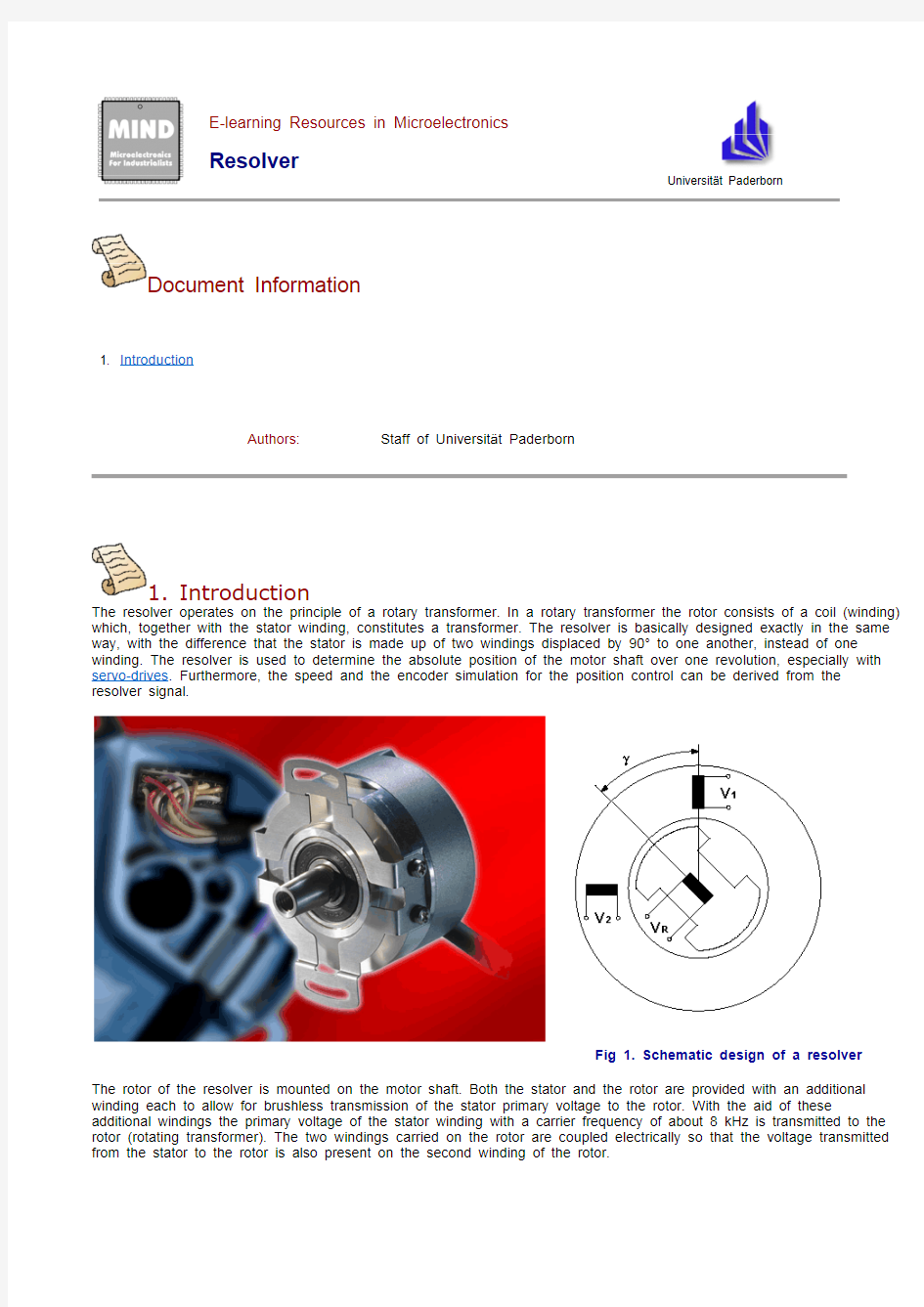
The resolver operates on the principle of a rotary transformer. In a rotary transformer the rotor consists of a coil (winding) which, together with the stator winding, constitutes a transformer. The resolver is basically designed exactly in the same way, with the difference that the stator is made up of two windings displaced by 90° to one another, instead of one winding. The resolver is used to determine the absolute position of the motor shaft over one revolution, especially with servo-drives . Furthermore, the speed and the encoder simulation for the position control can be derived from the resolver signal.
The rotor of the resolver is mounted on the motor shaft. Both the stator and the rotor are provided with an additional winding each to allow for brushless transmission of the stator primary voltage to the rotor. With the aid of these
additional windings the primary voltage of the stator winding with a carrier frequency of about 8 kHz is transmitted to the rotor (rotating transformer). The two windings carried on the rotor are coupled electrically so that the voltage transmitted
from the stator to the rotor is also present on the second winding of the rotor.
E-learning Resources in Microelectronics
Resolver
Universit?t Paderborn
1. Introduction
Authors:
Staff of Universit?t Paderborn
Fig 1. Schematic design of a resolver
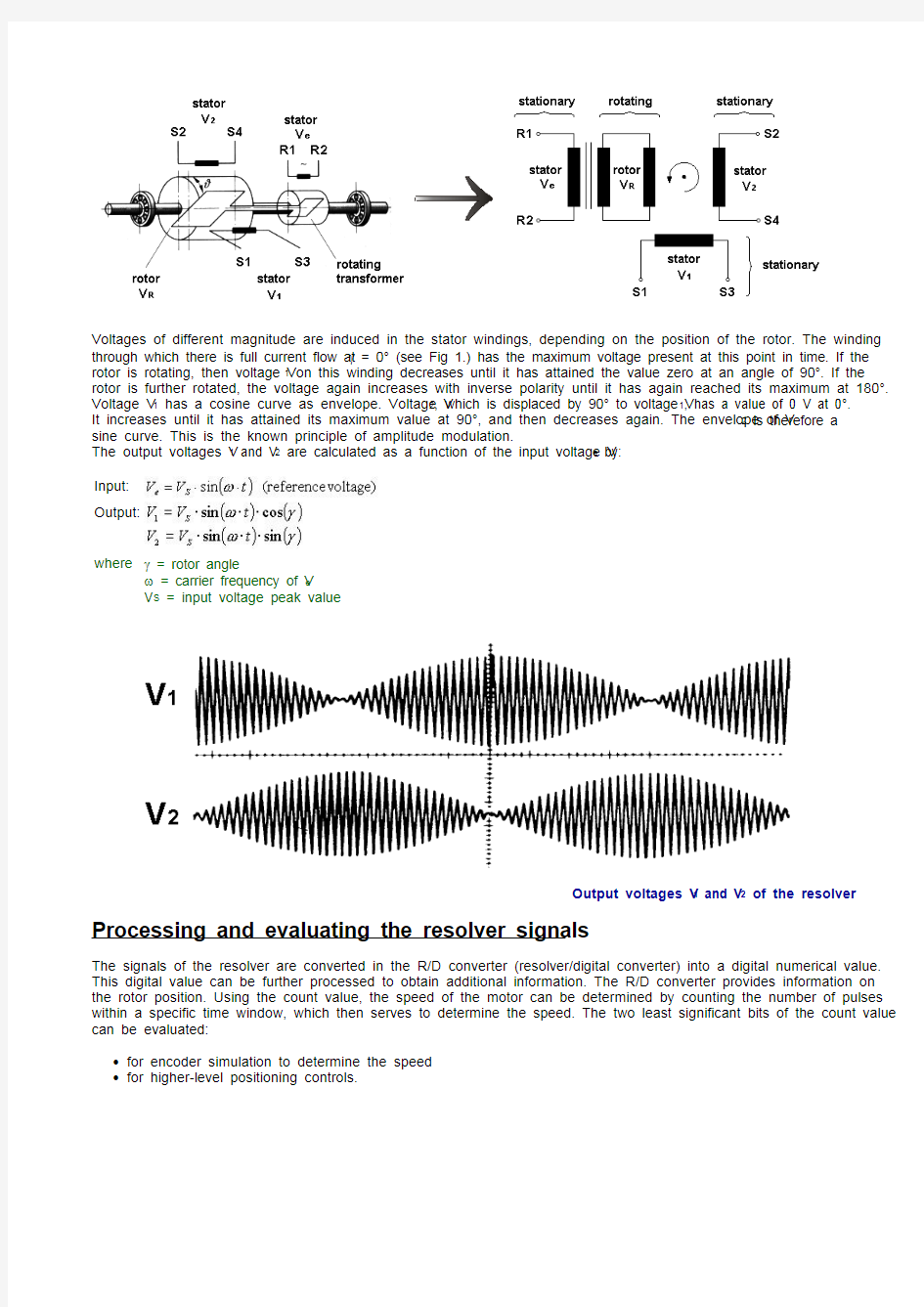
Voltages of different magnitude are induced in the stator windings, depending on the position of the rotor. The winding through which there is full current flow at J = 0° (see Fig 1.) has the maximum voltage present at this point in time. If the rotor is rotating, then voltage V 1 on this winding decreases until it has attained the value zero at an angle of 90°. If the rotor is further rotated, the voltage again increases with inverse polarity until it has again reached its maximum at 180°. Voltage V 1 has a cosine curve as envelope. Voltage V 2, which is displaced by 90° to voltage V 1, has a value of 0 V at 0°. It increases until it has attained its maximum value at 90°, and then decreases again. The envelope of V 2 is therefore a sine curve. This is the known principle of amplitude modulation.
The output voltages V 1 and V 2 are calculated as a function of the input voltage V e by:
Output voltages V 1 and V 2 of the resolver Processing and evaluating the resolver signals
The signals of the resolver are converted in the R/D converter (resolver/digital converter) into a digital numerical value. This digital value can be further processed to obtain additional information. The R/D converter provides information on the rotor position. Using the count value, the speed of the motor can be determined by counting the number of pulses within a specific time window, which then serves to determine the speed. The two least significant bits of the count value can be evaluated:
z
for encoder simulation to determine the speed z
for higher-level positioning controls.Input:
Output:
where J = rotor angle
Z = carrier frequency of V e
V
S = input voltage peak value
Processing of resolver signals A further example of analysis of signal processing is described in the next figure:
Block circuit diagram of an R/D converter The oscillator [1] (see Fig.) feeds the rotor via the stator winding with an AC voltage of about 10 V rms and a frequency of about 8 kHz. The digital numerical value of the up-down counter [6] is then converted in a D/A converter [5]. The output signals V1 and V2 of the stator of the resolver are multiplied by the sine or cosine of the converted value. The value of the up-down counter represents the angle M. As a result, the two voltages below are produced:
The two multiplied output signals are subtracted from one another in the error amplifier [2]. The difference corresponds to the error (deviation) between the angle M and the actual angle J. The error is:
Simplified, this equation is:
This signal is demodulated in the phase-selective rectifier [3] which is downstream of the subtractor [2] in order to remove the carrier frequency. The signal arising at the output of the rectifier is the error voltage V F, which is proportional to sin (J M).
This voltage is applied simultaneously to an output of the R/D converter and the input of the integrator [4]. The integrator [4] integrates the error voltage which is applied to the input of a voltage controlled oscillator (VCO) [7].
If there is an angular difference between the angles J and M, the integrator produces a DC voltage from it. Using this DC
voltage, the VCO [7] produces pulses, which are then processed in the up-down counter [6].
The modules [2] to [7] form a closed-loop control circuit working similar to a PLL (Phase locked loop). A DC voltage signal is present at the VCO [7] until the difference between the angles J and M equals zero, ie. until:
J M
Thus the digital value of the up-down counter corresponds to the analogue value of the angle J of the resolver present at
the input of the R/D converter.
Over a continuous turn of the resolver the VCO must produce pulses until the count value of the V/R counter corresponds to the analogue value of the rotor angle at the input, ie. the angular variation of the resolver is offset. Consequently, the frequency of the VCO is proportional to the speed of the motor and the resolver. So the output voltage of the integrator can be used as a speed signal.
The R/D converter supplies a direct voltage VT at the outputs, which is proportional to the speed, plus absolute information for one revolution of the resolver.
The evaluation circuit is implemented as an integrated circuit. Only the oscillator [1] is connected externally.
The error of the resolver signal is negligible for most applications (< 0.05%).
Site developed by CRAL. Bolton Institute
Last updated 27.11.01 RA
第四章旋转变压器
第四章 旋转变压器 工作原理:一、二次绕组的电磁感应耦合程度由转子的转角决定。当旋转变压器的一次侧外施单相交流电压励磁时,二次侧的输出电压将与转子转角严格保持某种函数关系。 第一节 旋转变压器的结构特点和分类 结构: 旋转变压器的典型结构由定子和转子两部分构成。 铁心:高磁导率的铁镍软磁合金片或硅钢片经冲制、绝缘、叠装而成。定、转子之间的气隙是均匀的,绕组:两个轴线在空间互相垂直的分布绕组。 转子绕组引出线和滑环相接,滑环应有四个,固定在转轴的一端, 分类: 按照输出电压和转子转角的函数关系来分: 1) 正余弦旋转变压器(代号XZ) 2) 线性旋转变压器(代号XX) 3) 比例式旋转变压器(代号XL) 4) 特殊函数旋转变压器(正切函数、倒数函数、圆函数、对数函数等) 按照电机极对数多少来分:单极对和多极对(可以提高系统的精度)。 按照有无电刷与滑环间的滑动接触来分:接触式和无接触式两类。 第二节 正余弦旋转变压器的工作原理 4.2.1正弦绕组 在旋转变压器中常用的绕组有两种形式,即双层短距分布绕组和同心式正 弦绕组。 双层短距分布绕组能够达到较高的绕组精度并有良好的工艺性,但在绕组中存在一定量的谐波磁动势分量,其所引起的正余弦函数的误差达0.01%-0.07%,再加上工艺因素引起的误差,使旋转变压器的精度受到一定的限制,故双层短距分布绕组只适合对精度要求不很高的旋转变压器。 同心式正弦绕组为高精度绕组,它使各次谐波削弱到相当小,正余弦函数的误差从0.06%降到0.03%以下。缺点为工艺性差,绕组系数低。 正弦绕组是指绕组各元件的导体数沿定子内圆或转子外圆按正弦规律分布的同心式绕组。通常有两种分布形式:第一类是绕组的轴线对准槽的中心线,第二类是绕组的轴线对准齿的中心线。旋转变压器大都采用这两类正弦绕组。 图4-2表示了正弦绕组中各元件在空间沿转子圆周外圆分布的情况及空间磁动势的分布情况。为了使正弦绕组中各元件匝数沿圆周按正弦分布,各元件的匝数应满足 Z )i (cos N N cm ci π 12-= 正弦绕组每相的总匝数为 ])142cos(...3cos [cos 4 1 Z Z Z Z N N N cm Z i ci π ππ-+++==∑= 4.2.2 正余弦旋转变压器的工作原理 正余弦旋转变压器通常为两极结构,定子和转子分别安装两套互相垂直的正弦绕组。 定子绕组:21D D ——励磁绕组,43D D ——交轴绕组(或补偿绕组)。 转子绕组(输出绕组):21Z Z ——正弦绕组,43Z Z ——余弦绕组。定、转子间的气隙是均匀的。 图4-2 正弦绕组 f U α 图4-1 正余弦旋转变压器 的原理示意图
旋转变压器基础知识
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。 按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。 线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。后者(XDX )称单绕组线性旋转变压器。 3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。 二、 旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z 为阻抗。设加在定子绕组的激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为 sin sin sin θθω== (4-2)B s m V KV KV t (4—2) 式中K ——旋转变压器的变化;—的幅值m s V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。如果转子 安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过 的角度,它间接反映了机床工作台的位移。 由式(4-2)可知,转子绕组中的感应电势 B V 为以角速度ω随时间t 变化的交变电压信号。 其幅值 sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。因此,只要测量出转子绕组中的感 应电势的幅值,便可间接地得到转子相对于定子的位置,即θ角的大小。 以上是两极绕组式旋转变压器的基本工作原理,在实际应用中,考虑到使用的方便性和检测精度等因素,常采用四极绕组式旋转变压器。这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。 1.鉴相式工作方式 鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。如 图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。图中12S S 为定子主绕组,12 K K 为定子辅助绕组。当12S S 和12K K 中分别通以交变激磁电压时 s m V V cos (43);V V sin (44)ωω--= = t t (4—3) s m (43);V V sin (44)ω-- = t t (4—4) 根据线性叠加原理,可在转子绕组12B B 中得到感应电势B V ,其值为激磁电压s V 和k V 在12B B 中产生 感应电势BS V 和BK V 之和,即
变压器基本工作原理
第1章 变压器的基本知识和结构 1.1变压器的基本原理和分类 一、变压器的基本工作原理 变压器是利用电磁感应定律把一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能。 变压器工作原理图 当原边绕组接到交流电源时,绕组中便有交流电流流过,并在铁心中产生与外加电压频率相同的磁通,这个交变磁通同时交链着原边绕组和副边绕组。原、副绕组的感应分别表示为 dt d N e Φ-=1 1 dt d N e Φ-=2 2 则 k N N e e u u ==≈2 12121 变比k :表示原、副绕组的匝数比,也等于原边一相绕组的感应电势与副边一相绕组的感应电势之比。 改变变压器的变比,就能改变输出电压。但应注意,变压器不能改变电能的频率。 二、电力变压器的分类 变压器的种类很多,可按其用途、相数、结构、调压方式、冷却方式等不同来进行分类。 按用途分类:升压变压器、降压变压器; 按相数分类:单相变压器和三相变压器;
按线圈数分类:双绕组变压器、三绕组变压器和自耦变压器; 按铁心结构分类:心式变压器和壳式变压器; 按调压方式分类:无载(无励磁)调压变压器、有载调压变压器; 按冷却介质和冷却方式分类:油浸式变压器和干式变压器等; 按容量大小分类:小型变压器、中型变压器、大型变压器和特大型变压器。 三相油浸式电力变压器的外形,见图1,铁心和绕组是变压器的主要部件,称为器身见图2,器身放在油箱内部。 1.2电力变压器的结构 一、铁心 1.铁心的材料 采用高磁导率的铁磁材料—0.35~0.5mm厚的硅钢片叠成。 为了提高磁路的导磁性能,减小铁心中的磁滞、涡流损耗。变压器用的硅钢片其含硅量比较高。硅钢片的两面均涂以绝缘漆,这样可使叠装在一起的硅钢片相互之间绝缘。
角度传感器工作原理及应用简介
角度传感器工作原理及应用简介 角度位移传感器是利用角度变化来定位物体位置的电子元件。适用于汽车,工程机械,宇宙装置、导弹、飞机雷达天线的伺服系统以及注塑机,木工机械,印刷机,电子尺,机器人,工程监测,电脑控制运动器械等需要精确测量位移的场合。本文介绍角度位移传感器原理及其应用实例。角度位移传感器原理 角度传感器用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX 上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。 角度位移传感器实例 如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。举一个有关计算的例子。在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。所以它与主动轮的传动比也是3:1。也就是说,角度传感器转三周,主动轮转一周。角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。现在,我们需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。我们选择了体积最大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6=81.63.14256.22CM。现在已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256。我们总结一下。称R 为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量。即: I=GR 在例子中,G为3,对于乐高角度传感器来说,R一直为16.因此,我们可以得到: I=316=48 每旋转一次,齿轮所经过的距离正是它的周长C,应用这个方程式,利用其直径,你可以得出这个结论。
单相变压器的基本工作原理和结构
变压器是一种静止电器,它通过线圈间的电磁感应,将一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能. 3.1 变压器的基本工作原理和结构 3.2 单相变压器的空载运行 3.3 单相变压器的负载运行 3.4 变压器的参数测定 3.5 变压器的运行特性 隐形专家改编于2009-05
3.1 变压器的基本工作原理和结构 3.1.1 基本工作原理和分类 一、基本工作原理 变压器的主要部件是铁心和套在铁心上的两个绕组。两绕组只有磁耦合没电联系。在一 次绕组中加上交变电压,产生交链一、二次绕 组的交变磁通,在两绕组中分别感应电动势。 1 u 1 e 2 e 2u 1i 2 i Φ 1 U 2 U 1 u 2u L Z 1 2 12d Φe =-N dt d Φe =-N dt 只要(1)磁通有 变化量;(2)一、二次绕组的匝数不同,就能达到改变压的 目的。
二、分类 按用途分:电力变压器和电子变压器。 按绕组数目分:单绕组(自耦)变压器、双绕组变压器、三绕组变压器和多绕组变压器。 按相数分:单相变压器、三相变压器和多相变压器。 按铁心结构分:心式变压器、壳式变压器、环形变压器。 按工作频率分:低频(工频)与高频变压器
3.1.2基本结构 一、铁心 变压器的主磁路,为了提高导磁性能和减少铁损,用厚为 0.35-0.5mm、表面涂有绝缘漆的硅钢片叠成或卷绕而成。 二、绕组 变压器的电路,一般用绝缘铜线或铝线绕制而成。 三、胶心 胶心也可称骨架,用塑料压制而成,用来固定线圈。 四、固定夹 固定夹也可称牛夹,用铁板冲压而成,用来将变 压器固定在底板上。
角度位移传感器的结构及应用
导电塑料位移传感器使用时一般按分压器原理以电压输出或转换电流输出(4~20ma)与轴旋转角度或直线位移成高精度的线性关系。其特点是高精度、高寿命、高平滑性、高分辨率。可用作位置反馈、位置检测、电平调节等。通常用于工业自动化、精密仪器仪表、电动执行器、纺织、注塑、数控的机床设备、医疗器械、汽车、火车、飞机、军舰、导弹等领域中的自动控制系统、伺服系统、信息反馈系统。 传感器结构主要是由电阻元件、轴、电刷、壳体、盖等组成,另加位移变送器或数字显示器。旋转式传感器有单联、双联二种,它们安装形式相同,分为螺母固定(如wdj27—1型)、螺钉固定(如wdj36—1型)和压板固定(wdj36—4型)三种,电信号引出一般采用接线柱形式。直滑式传感器的安装形式一般采用螺钉固定,电信号引出有三种形式:接线桩式(如:wdm14系列)、插座式(如cfy电子尺系列)和导线式(如cwy系列)。 三个接线柱或红、黄、蓝三根线对应标牌标记1、2、3分别表示:1是输入端;2是输出端;3是接地。(请注意:如果引出端2接错线会烧坏传感器)轴从1端到3端角度旋转或直线位移时阻值发生变化,由2端按线性规律高精度输出,同时通过变换电路将阻值变化转换为信号显示。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解相关传感器产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城https://www.360docs.net/doc/964881496.html,。
旋转变压器(resolver)原理
§4—1旋转变压器 旋转变压器是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 一、旋转变压器的结构 旋转变压器的结构和两相绕线式异步电机的结构相似,可分为定子和转子两大部分。定子和转子的铁心由铁镍软磁合金或硅钢薄板冲成的槽状心片叠成。它们的绕组分别嵌入各自的槽状铁心内。定子绕组通过固定在壳体上的接线柱直接引出。转子绕组有两种不同的引出方式。根据转子绕组两种不同的引出方式,旋转变压器分为有刷式和无刷式两种结构形式。 图4-1是有刷式旋转变压器。它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与滑环是机械滑动接触的,所以旋转变压器的可靠性差,寿命也较短。 图4-1 有刷式旋转变压器
图4-2 无刷式旋转变压器 图4—2是无刷式旋转变压器。它分为两大部分,即旋转变压器本体和附加变压器。附加变压器的原、副边铁心及其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。旋转变压器本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及使用寿命,但其体积、质量、成本均有所增加。 常见的旋转变压器一般有两极绕组和四极绕组两种结构形式。两极绕组旋转变压器的定子和转子各有一对磁极,四极绕组则有两对磁极,主要用于高精度的检测系统。除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。 二、旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z为阻抗。设 加在定子绕组的激磁电压为
角度位移传感器原理及其应用实例
角度位移传感器原理及其应用实例 时间:2012-02-08 17:10:54 来源:作者: 角度位移传感器是利用角度变化来定位物体位置的电子元件。适用于汽车,工程机械,宇宙装置、导弹、飞机雷达天线的伺服系统以及注塑机,木工机械,印刷机,电子尺,机器人,工程监测,电脑控制运动器械等需要精确测量位移的场合。本文介绍角度位移传感器原理及其应用实例。 角度位移传感器原理 角度传感器用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX 上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。 角度位移传感器实例 如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。举一个有关计算的例子。在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。所以它与主动轮的传动比也是3:1。也就是说,角度传感器转三周,主动轮转一周。角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。现在,我们需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。我们选择了体积最大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6×π=81.6×3.14≈256.22CM。现在已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256。我们总结一下。称R为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量。即: I=G×R 在例子中,G为3,对于乐高角度传感器来说,R一直为16.因此,我们可以得到:I=3×16=48 每旋转一次,齿轮所经过的距离正是它的周长C,应用这个方程式,利用其直径,你可以得出这个结论。 C=D×π 在我们的例子中:
变压器基本工作原理
第1章 变压器的基本知识和结构 1.1变压器的基本原理和分类 一、变压器的基本工作原理 变压器是利用电磁感应定律把一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能。 变压器工作原理图 当原边绕组接到交流电源时,绕组中便有交流电流流过,并在铁心中产生与外加电压频率相同的磁通,这个交变磁通同时交链着原边绕组和副边绕组。原、副绕组的感应分别表示为 则 k N N e e u u ==≈2 12121 变比k :表示原、副绕组的匝数比,也等于原边一相绕组的感应电势与副边一相绕组的感应电势之比。 改变变压器的变比,就能改变输出电压。但应注意,变压器不能改变电能的频率。 二、电力变压器的分类 变压器的种类很多,可按其用途、相数、结构、调压方式、冷却方式等不同来进行分类。 按用途分类:升压变压器、降压变压器; 按相数分类:单相变压器和三相变压器; 按线圈数分类:双绕组变压器、三绕组变压器和自耦变压器; 按铁心结构分类:心式变压器和壳式变压器; 按调压方式分类:无载(无励磁)调压变压器、有载调压变压器; 按冷却介质和冷却方式分类:油浸式变压器和干式变压器等; 按容量大小分类:小型变压器、中型变压器、大型变压器和特大型变压器。 三相油浸式电力变压器的外形,见图1,铁心和绕组是变压器的主要部件,称为器身见图2,器身放在油箱内部。
1.2电力变压器的结构 一、铁心 1.铁心的材料 采用高磁导率的铁磁材料—0.35~0.5mm厚的硅钢片叠成。 为了提高磁路的导磁性能,减小铁心中的磁滞、涡流损耗。变压器用的硅钢片其含硅量比较高。硅钢片的两面均涂以绝缘漆,这样可使叠装在一起的硅钢片相互之间绝缘。 2.铁心形式 铁心是变压器的主磁路,电力变压器的铁心主要采用心式结构 。 二、绕组 1.绕组的材料 铜或铝导线包绕绝缘纸以后绕制而成。 2.形式
磁阻式多极旋转变压器的工作原理
磁阻式多极旋转变压器的工作原理 普通旋转变压器的精度较低,为角分的数量级,一般应用于精度要求不高或大型机床的粗测和中测系统中。为提高精度,近年来数控系统中广泛采用磁阻式多极旋转变压器。 磁阻式多极旋转变压器(又称细分解算器,或游标解算器),它是一种多极角度传感元件,实际上是一种非接触式磁阻可变的耦合变压器,其结构与传统的多极旋转变压器不同之处在于其励磁绕组和输出绕组均安置在定子铁心的槽中,转子仅由带齿的选片叠制而成,不放任何绕组,实现无接触运行。定子冲片内圆冲制有若干大齿(也称为极靴),每个大齿上又冲制若干等分小齿,绕组安放在大齿槽中。转子外圆表面冲制有若干等分小齿,其数与擞对数相等。输出和输入绕组均为集中绕制,其正余弦绕组的匝数控正弦规律变化。而传统结构的多极旋转变压器是采用分布式绕组。图6-4所示为磁阻式多极旋转变压器的原理示意图,其中画出了5个定子齿,4个转于齿。定子槽内安置了逐槽反向串接的输入绕组1-1和两个间隔绕制反向串接的输出绕组2-2,3-3。当给输入绕组1-1加上交流正弦电压时,两个输出绕组2-2、3-3中分别得到两个电压,其幅值主要取决于定子和转子齿的相对位置间气隙磁导的大小。当转子相对定子转动时,空间的气隙磁导发生变化,转子每转过一个转子齿距,气隙磁导变化一个周期;而当转子转过一周时,气隙磁导变化的周期数等于转子齿数。这样,转子的齿数就相当于磁阻式多极旋转变压器极对数,从而达到多极的效果。气隙磁导的变化,导致输入和输出绕组之间互感的变化,输出绕组感应的电势亦发生变化。实际应用中是通过输出电压幅值的变化而测得转子的转角的。
磁阻式多极旋转变压器没有电刷和滑环接触,工作可靠、抗冲击能力强,并能连续高速运行、寿命长,多用于高精度及各种控制式电气变速双通道系统,提高数控机床定位精度。尽管它的测量精度不如感应同步器和光栅,但高于普通旋转变压器,误差不超过3.5角秒,而且成本低,不需维修,输出信号电平高(0.5—1.5V.最高可达4V),所以在数控机床上的应用很有前途。
旋转变压器的工作原理及应用
旋转变压器的工作原理及应用 旋转变压器的工作原理及应用 旋转变压器又称分解器,是一种控制用的微电机,它将机械转角变换成与该转角呈某一函数关系的电信号的一种间接测量装置。在结构上与二相线绕式异步电动机相似,由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。激磁电压接到转子绕组上,感应电动势由定子绕组输出。常用的激磁频率为400Hz,500Hz,1000Hz和5000Hz。 旋转变 压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。因此,在数控机床上广泛应用。 通常应用的旋转变压器为二极旋转变压器,其定子和转子绕组中各有互相垂直的两个绕组。另外,还有一种多极旋转变压器。也可以把一个极对数少的和一个极对数多的两种旋转变压器做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。 什么是旋转变压器以及应用方式 什么是旋转变压器以及应用方式 旋转变压器又称分解器,是一种控制用的微电机,它将机械转角变换成与该转角呈某一函数关系的电信号的一种间接测量装置。 在结构上与二相线绕式异步电动机相似,由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。激磁电压接到转子绕组上,感应电动势由定子绕组输出。常用的激磁频率为400Hz,500Hz,1000Hz和5000Hz。 旋转 变压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。因此,在数控机床上广泛应用。 通常应用的旋转变压器为二极旋转变压器,其定子和转子绕组中各有互相垂直的两个绕组。另外,还有一种多极旋转变压器。也可以把一个极对数少的和一个极对数多的两种旋转变压器做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。 旋转变压器的应用 旋转变压器作为位置检测装置有两种应用方式:鉴相方式和鉴幅方式。 1.鉴相工作方式 在旋转变压器定子的两相正交绕组(正弦用s和和余弦用c表示),一般称为正弦绕组和余弦绕组上,分别输入幅值相等,频率相同的正弦、余弦激磁电压 Us=Umsinωt Uc=Umcosωt 两相激磁电压在转子绕组中会产生感应电动势。根据线性叠加原理,在转子绕组中感应电压为 U=kUssinθ机+kUccosθ机=kUmcos(ωt-θ机)
【CN209877990U】一种旋转体的非接触式绝对角度位置传感器【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920553863.X (22)申请日 2019.04.23 (73)专利权人 刘法锐 地址 518128 广东省深圳市宝安区龙华街 道龙华新区龙悦居四期7栋211房 专利权人 陈贤瑞 (72)发明人 刘法锐 陈贤瑞 刘非 李杰 陈启兴 (74)专利代理机构 北京元本知识产权代理事务 所 11308 代理人 王红霞 (51)Int.Cl. G01D 5/14(2006.01) (ESM)同样的发明创造已同日申请发明专利 (54)实用新型名称 一种旋转体的非接触式绝对角度位置传感 器 (57)摘要 本实用新型属于开关磁阻电机的控制和调 速技术领域,公开了一种旋转体的非接触式绝对 角度位置传感器;在旋状体上套一个径向磁化的 双极磁环,三个霍尔集成电路等间距弧形摆放或 者两个霍尔集成电路等间距、正交的摆放的方 式,利用机械装置安装霍尔集成电路;霍尔集成 电路与信号处理电路连接。在旋转体匀速旋转的 条件下,三个线性霍尔集成电路输出电压信号是 振幅和频率相同、初相位不同的正弦波;以中间 线性霍尔集成电路输出电压信号为参照,左右两 个线性霍尔集成电路的输出信号的初相位与旋 转体的旋转方向有关,且互为相反数。本实用新 型的结构简单、成本低、精度高、断电不用存储、 静止或旋转兼可、 旋转体正反转兼可。权利要求书1页 说明书7页 附图4页CN 209877990 U 2019.12.31 C N 209877990 U
权 利 要 求 书1/1页CN 209877990 U 1.一种旋转体的非接触式绝对角度位置传感器,其特征在于,所述旋转体的非接触式绝对角度位置传感器包括:与旋转体同轴的或者相对静止的双极磁环、线性霍尔集成电路、信号处理电路板; 在旋状体上套一个径向磁化的双极磁环,三个霍尔集成电路等间距弧形摆放或者两个霍尔集成电路等间距、正交的摆放的方式,利用机械装置安装霍尔集成电路;霍尔集成电路与信号处理电路连接。 2.如权利要求1所述的旋转体的非接触式绝对角度位置传感器,其特征在于,在旋转体匀速旋转的条件下,三个线性霍尔集成电路输出电压信号是振幅和频率相同、初相位不同的正弦波;以中间线性霍尔集成电路输出电压信号为参照,左右两个线性霍尔集成电路的输出信号的初相位与旋转体的旋转方向有关,且互为相反数。 3.如权利要求1所述的旋转体的非接触式绝对角度位置传感器,其特征在于,所述信号处理电路板包括ADC、CPU、通信接口; ADC,是三路或者两路输入,分辨率决定了绝对角度位置的精度; CPU,完成ADC的初始化、中断控制、计算、存储和输出; 通信接口,完成绝对角度位置数字信号的输出,可以是串口输出,也可以并口输出,当ADC的采用速率很高时使用并口方式。 4.如权利要求1所述的旋转体的非接触式绝对角度位置传感器,其特征在于,所述线性霍尔集成电路的摆放位置,除了三个等间距、弧形状外,还可以采用两个等间距、正交的摆放。 2
关于角度传感器工作原理
关于角度传感器工作原理 角度传感器用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到rcx上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。 如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。举一个有关计算的例子。在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。所以它与主动轮的传动比也是3:1。也就是说,角度传感器转三周,主动轮转一周。角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。我们需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。我们选择了体积大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6×π=81.6×3.14≈256.22CM。已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256。我们总结一下。称R为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量 应用领域:使用角度传感器来控制你的轮子可以间接的发现障碍物。原理非常简单:如果马达运转,而齿轮不转,说明你的机器已经被障碍物给挡住了。此技术使用起来非常简单,而且非常有效;唯yi要求就是运动的轮子不能在地板上打滑(或者说打滑次数太多),否则你将无法检测到障碍物。如果是一个空转的齿轮连接到马达上就可以避免这个问题,这个轮子不是由马达驱动而是通过装置的运动带动它:在驱动轮旋转的过程中,如果惰轮停止了,说明你碰到障碍物了。 在许多情况下角度传感器是非常有用的:控制手臂,头部和其它可移动部位的位置。值的注意的是,当运行速度太慢或太快时,RCX在的检测和计数方面会受到影响。事实上,问题并不是出在RCX身上,而是它的操作系统,如果速度超出了其指定范围,RCX就会丢失一些数据。Steve Baker用实验证明过,转速在每分钟50到300转之间
变压器的基本工作原理
变压器的基本工作原理Orga nize en terprise safety man ageme nt pla nning, guida nee, in spect ion and decisi on-mak ing. en sure the safety status, and unify the overall pla n objectives
编制:____________________ 审核:____________________ 时间:____________________
变压器的基本工作原理 简介:该安全管理资料适用于安全管理工作中组织实施企业安全管理规划、指导、检查 和决策等事项,保证生产中的人、物、环境因素处于最佳安全状态,从而使整体计划目标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅读内容。 一、变压器的种类: 1. 按冷却方式分类:干式(自冷)变压器、油浸(自冷)变压器、氟化物(蒸发冷却)变压器。 2. 按防潮方式分类:开放式变压器、灌封式变压器、密封式 变压器。 3. 按铁芯或线圈结构分类:芯式变压器(插片铁芯、C型 铁芯、铁氧体铁芯)、壳式变压器(插片铁芯、C型铁芯、铁氧体铁芯)、环型变压器、金属箔变压器。 4. 按电源相数分类:单相变压器、三相变压器、多相变压器。 5. 按用途分类:电源变压器、调压变压器、音频变压器、中频变压器、高频变压器、脉冲变压器 二、变压器工作原理: 变压器的基本工作原理是:变压器是由一次绕组、二次绕组和铁心组成,当一次绕组加上交流电压时,铁心中产生交变磁
通,交变磁通在一次、二次绕组中感应电动势与在单匝上感应电动势的大小是相同的,但一次、二次侧绕组的匝数不同,一次、二次侧感应电动势的大小就不同,从而实现了变压的目的,一次、二次侧感应电动势之比等于一次、二次侧匝数之比。 当二次侧接上负载时,二次侧电流也产生磁动势,而主磁通由于外加电压不变而趋于不变,随之在一次侧增加电流,使磁动势达到平衡,这样,一次侧和二次侧通过电磁感应而实现了能量的传递。 三、变压器的主要部件结构作用: (2) 变压器组成部件:器身(铁芯、绕组、绝缘、引线)、变压器油、油箱和冷却装置、调压装置(即分接开关,分为无励磁调压和有载调压)、保护装置(吸湿器、安全气道、气体继电器、储油柜、净油器及测温装置等)和出线套管。 (3) 变压器主要部件的作用: (1)铁芯:作为磁力线的通路,同时起到支持绕组的作用。变压器通常由含硅量较高,厚度分别为0.35 mm\0.3mm\0.27 mm,表面涂有绝缘漆的热轧或冷轧硅钢片叠装而成铁心分为铁
变压器的工作原理及结构
变压器工作原理: 当一个交流电压U1接到初级绕组的线圈时,由于交流电的强度和极性是不停地正、负交替变化,因此初级绕组的线圈所产生的磁力线数目也不停改变。由于磁场强度的不断变化,促使缠绕在同一铁芯上的另一端线圈产生感应电动势U2 .变压器是变换交流电压、电流和阻抗的器件,当初级线圈中通有交流电流时,铁芯(或磁芯)中便产生交流磁通,使次级线圈中感应出电压(或电流)。变压器由铁芯(或磁芯)和线圈组成,线圈有两个或两个以上的绕组,其中接电源的绕组叫初级线圈,其余的绕组叫次级线圈。 理想变压器: 不计一次、二次绕组的电阻和铁耗, 其间耦合系数K=1 的变压器称之为理想变压器 描述理想变压器的电动势平衡方程式为e1(t) = -N1 d φ/dt e2(t) = -N2 d φ/dt 若一次、二次绕组的电压、电动势的瞬时值均按正弦规律变化,则有不计铁芯损失,根据能量守恒原理可得由此得出一次、二次绕组电压和电流有效值的关系令K=N1/N2,称为匝比(亦称电压比) U1/U2=N1/N2 ,即对同一变压器的任意两个线圈,都有电压和匝数成正比。P入=P出,即无论有几个副线圈在工作,变压器的输入功率总等于所有输出功率之和. https://www.360docs.net/doc/964881496.html,/view/30130.htm https://www.360docs.net/doc/964881496.html,/s/blog_4876e83b0100ru0s.html 变压器(transformer)是一种电磁设备,其功能大致可分为以下作用:Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 1可以随意把交流电压值或电流值增加或减少Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 2用作阻抗匹配的设备:变压器可用来匹配不平衡的阻抗。例如某个放大器的输出阻抗是20欧,而接往4欧的扬声器,这时必须用一个变压器以正确的匝数比率来匹配此二个阻抗。Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 3用做信号传输,有些信号要求有电的隔离,这时用变压器就有用了。Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 4用与振荡电路作反馈元件Rkf838电子-技术资料-电子元件-电路图-技术应用网站-基本知识-原理-维修-作用-参数-电子元器件符号 变压器就是利用线圈的互感原理把电压改变。事实上一个电感器的磁场变化可以促使在近距
变压器的工作原理是什么
一.变压器的工作原理 变压器---利用电磁感应原理,从一个电路向另一个电路传递电能或传输信号的一种电器是电能传递或作为信号传输的重要元件 1.变压器 ---- 静止的电磁装置 变压器可将一种电压的交流电能变换为同频率的另一种电压的交流电能 电压器的主要部件是一个铁心和套在铁心上的两个绕组。 变压器原理图(图3.1.2) 与电源相连的线圈,接收交流电能,称为一次绕组 与负载相连的线圈,送出交流电能,称为二次绕组 设 一次绕组的二次绕组的 电压相量 U1 电压相量 U2 电流相量 I1 电流相量 I2 电动势相量 E1 电动势相量 E2 匝数 N1 匝数 N2 同时交链一次,二次绕组的磁通量的相量为φm ,该磁通量称为主磁通 请注意图3.1.2 各物理量的参考方向确定。 2.理想变压器 不计一次、二次绕组的电阻和铁耗, 其间耦合系数 K=1 的变压器称之为理想变压器 描述理想变压器的电动势平衡方程式为 e1(t) = -N1 d φ/dt e2(t) = -N2 d φ/dt 若一次、二次绕组的电压、电动势的瞬时值均按正弦规律变化, 则有
不计铁心损失,根据能量守恒原理可得 由此得出一次、二次绕组电压和电流有效值的关系 令 K=N1/N2,称为匝比(亦称电压比),则 二.变压器的结构简介 1.铁心 铁心是变压器中主要的磁路部分。通常由含硅量较高,厚度为 0.35 或 0.5 mm,表面涂有绝缘漆的热轧或冷轧硅钢片叠装而成 铁心分为铁心柱和铁轭俩部分,铁心柱套有绕组;铁轭闭合磁路之用 铁心结构的基本形式有心式和壳式两种 心式变压器结构示意图(图3.1.6) 2.绕组 绕组是变压器的电路部分, 它是用纸包的绝缘扁线或圆线绕成 变压器的基本原理是电磁感应原理,现以单相双绕组变压器为例说明其基本工作原理(如上图):当一次侧绕组上加上电压ú1时,流过电流í1,在铁芯中就产生交变磁通?1,这些磁通称为主磁通,在它作用下,两侧绕组分别感应电势é1,é2,感应电势公式为:E=4.44f N?m 式中:E--感应电势有效值 f--频率 N--匝数 ?m--主磁通最大值 由于二次绕组与一次绕组匝数不同,感应电势E1和E2大小也不同,当略去内阻
变压器基本工作原理
第1章 变压器的基本知识与结构 1、1变压器的基本原理与分类 一、变压器的基本工作原理 变压器就是利用电磁感应定律把一种电压等级的交流电能转换成同频率的另一种电压等级的交流电能。 变压器工作原理图 当原边绕组接到交流电源时,绕组中便有交流电流流过,并在铁心中产生与外加电压频率相同的磁通,这个交变磁通同时交链着原边绕组与副边绕组。原、副绕组的感应分别表示为 dt d N e Φ-=11 dt d N e Φ-=22 则 k N N e e u u ==≈212121 变比k:表示原、副绕组的匝数比,也等于原边一相绕组的感应电势与副边一相绕组的感应电势之比。 改变变压器的变比,就能改变输出电压。但应注意,变压器不能改变电能的频率。 二、电力变压器的分类 变压器的种类很多,可按其用途、相数、结构、调压方式、冷却方式等不同来进行分类。 按用途分类:升压变压器、降压变压器; 按相数分类:单相变压器与三相变压器; 按线圈数分类:双绕组变压器、三绕组变压器与自耦变压器; 按铁心结构分类:心式变压器与壳式变压器; 按调压方式分类:无载(无励磁)调压变压器、有载调压变压器; 按冷却介质与冷却方式分类:油浸式变压器与干式变压器等; 按容量大小分类:小型变压器、中型变压器、大型变压器与特大型变压器。
三相油浸式电力变压器的外形,见图1,铁心与绕组就是变压器的主要部件,称为器身见图2,器身放在油箱内部。 1、2电力变压器的结构 一、铁心 1、铁心的材料 采用高磁导率的铁磁材料—0、35~0、5mm厚的硅钢片叠成。 为了提高磁路的导磁性能,减小铁心中的磁滞、涡流损耗。变压器用的硅钢片其含硅量比较高。硅钢片的两面均涂以绝缘漆,这样可使叠装在一起的硅钢片相互之间绝缘。 2、铁心形式 铁心就是变压器的主磁路,电力变压器的铁心主要采用心式结构 。 二、绕组 1、绕组的材料 铜或铝导线包绕绝缘纸以后绕制而成。
旋转变压器工作原理
旋转变压器工作原理 摘要:本文介绍了虽然目前已逐渐被广泛应用,但仍未被人们所熟悉的,角度位置传感元件—旋转变压器。文章对旋转变压器的发展、结构、原理、参数与性能指标及其信号变换做了简单的介绍;最后对几种类型旋转变压器的各方面作了比较,以供选择、使用时参考。 曲家骐:上海赢双电机有限公司 旋转变压器介绍 ⒈概述 ⒈⒈旋转变压器的发展 旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。这些函数是最常见的,也是容易实现的。在对绕组做专门设计时,也可产生某些特殊函数的电气输出。但这样的函数只用于特殊的场合,不是通用的。60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。 旋转变压器是目前国内的专业名称,简称“旋变” 。俄文里称作“Вращающийся Трансформатор” ,词义就是“旋转变压器”。英文名字叫“resolver”,根据词义,有人把它称作为“解算器”或“分解器”。 作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。由于制作和精度的缘故,磁性编码器没有其他两种普及。光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。随着电子工业的发展,电子元器件集成化程度的提高,元器件的价格大大下降;另外,信号处理技术的进步,旋转变压器的信号处理电路变得简单、可靠,价格也大大下降。而且,又出现了软件解码的信号处理,使得信号处理问题变得更加灵活、方便。这样,旋转变压器的应用得到了更大的发展,其优点得到了更大的体现。和光学编码器相比,旋转变压器有这样几点明显的优点:①无可比拟的可靠性,非常好的抗恶劣环境条件的能力;②可以运行在更高的转速下。(在输出12 bit的信号下,允许电动机的转速可达60,000rpm。而光学编码器,由于光电器件的频响一般在200kHz以下,在12 bit时,速度只能达到3,000rpm);③方便的绝对值信号数据输出。 ⒈⒉旋转变压器的应用 旋转变压器的应用,近期发展很快。除了传统的、要求可靠性高的军用、航空航天领域之外,在工业、交通以及民用领域也得到了广泛的应用。特别应该提出的
变压器原理
变压器 第一节变压器的工作原理、分类及结构 一、结构 1.铁心 如图,分铁心柱、磁轭两部分。 材料:0.35mm的冷轧有取向硅钢片,如:DQ320,DQ289,Z10,Z11等。 工艺:裁减、截短、去角、叠片、固定。 2.绕组 分同心式和交叠式两大类。 交叠式如右图。 同心式包括圆筒式、连续式、螺旋式等,见上图。 材料:铜(铝)漆包线,扁线。 工艺:绕线包、套线包。 3.其它部分 油箱(油浸式)、套管、分接开关等。
4.额定值 额定容量S N 额定电压U 1N U 2N 额定电流I 1N I 2N 对于单相变压器,有N N N N N I U I U S 2211== 对于三相变压器,有N N N N N I U I U S 221133== 注意一点:变压器的二次绕组的额定电压是指一次绕组接额定电压的电源,二次绕组开路时的线电压。 [讨论题]一台三相电力变压器,额定容量1600kV A ,额定电压10kV/6.3kV ,Y ,d 接法,求一次绕组和二次绕组的额定电流和相电流。 自己看[例3-1]。
总结:熟悉变压器额定值的规定。 二、变压器的工作原理 按照上图规定变压器各物理量的参考方向,有 dt d N e dt d N e φφ2211,-=-= 定义变比 2 1 21N N E E k = = 工作原理: (1) 变压器正常工作时,一次绕组吸收电能,二次绕组释放电能; (2) 变压器正常工作时,两侧绕组电压之比近似等于它们的匝数之比; (3) 变压器带较大的负载运行时,两侧绕组的电流之比近似等于它们匝数的反比; (4) 变压器带较大的负载运行时,两侧绕组所产生的磁通,在铁心中的方向相反。 总结:牢记变压器的四条原理。 第二节 单相变压器的空载运行 一、空载运行时的物理情况 如图,变压器一次绕组接额定电压,二次绕组开路,称为变压器空载运行。此时,变压器一次绕组流过一个很小的电流,称为空载电流i 0,大约占额定电流的2%~5%,因此空载时变压器的铜损耗是很小的。为什么? 又, 11144.4N f E U m Φ=≈