M70指令表
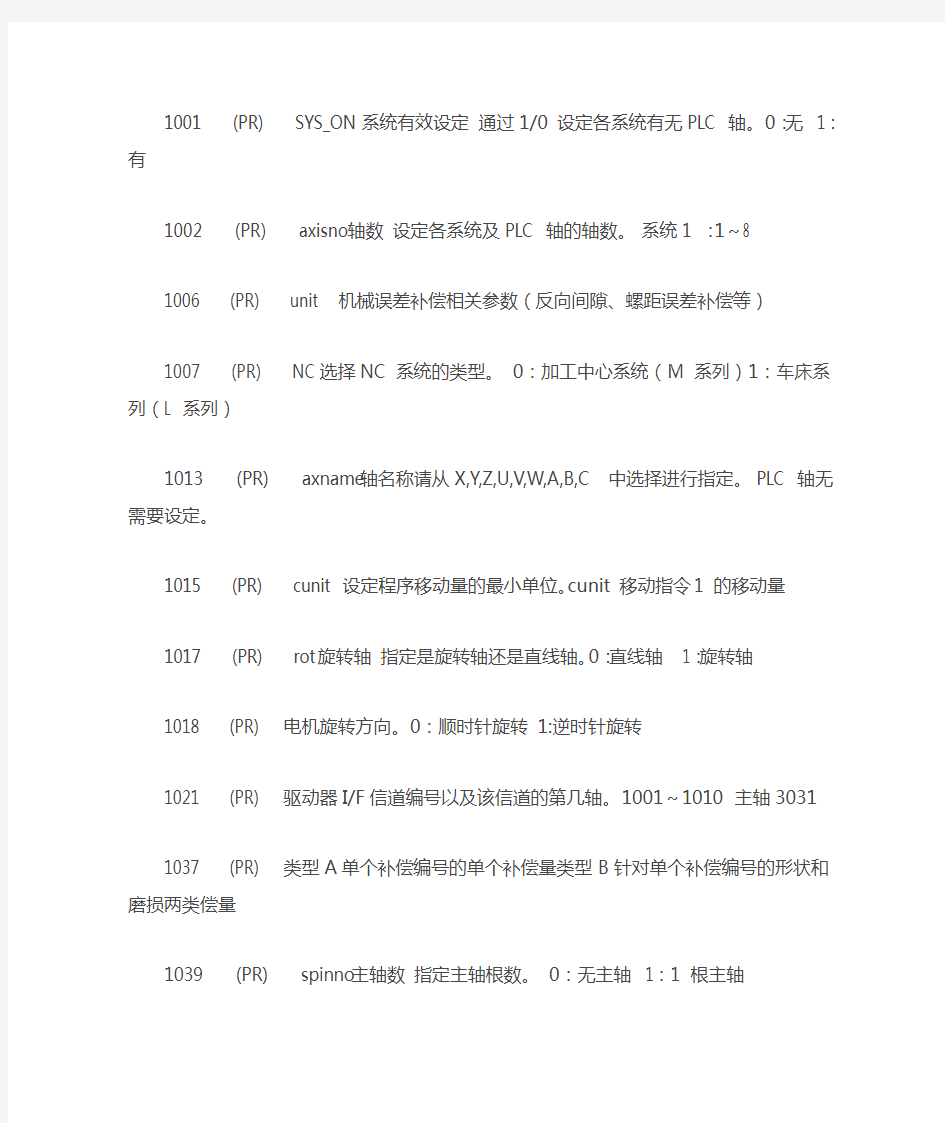
1001 (PR) SYS_ON 系统有效设定通过1/0 设定各系统有无PLC 轴。 0:无 1:有
1002 (PR) axisno 轴数设定各系统及PLC 轴的轴数。系统1 :1~8
1006 (PR) unit 机械误差补偿相关参数(反向间隙、螺距误差补偿等)
1007 (PR) NC 选择NC 系统的类型。0:加工中心系统(M 系列)1:车床系列(L 系列)
1013 (PR) axname 轴名称请从X,Y,Z,U,V,W,A,B,C 中选择进行指定。PLC 轴无需要设定。
1015 (PR) cunit 设定程序移动量的最小单位。cunit 移动指令1 的移动量
1017 (PR) rot 旋转轴指定是旋转轴还是直线轴。0:直线轴 1:旋转轴
1018 (PR) 电机旋转方向。0:顺时针旋转1:逆时针旋转
1021 (PR) 驱动器I/F信道编号以及该信道的第几轴。1001~1010 主轴3031
1037 (PR) 类型A单个补偿编号的单个补偿量类型B针对单个补偿编号的形状和磨损两类偿量
1039 (PR) spinno 主轴数指定主轴根数。0:无主轴 1:1 根主轴
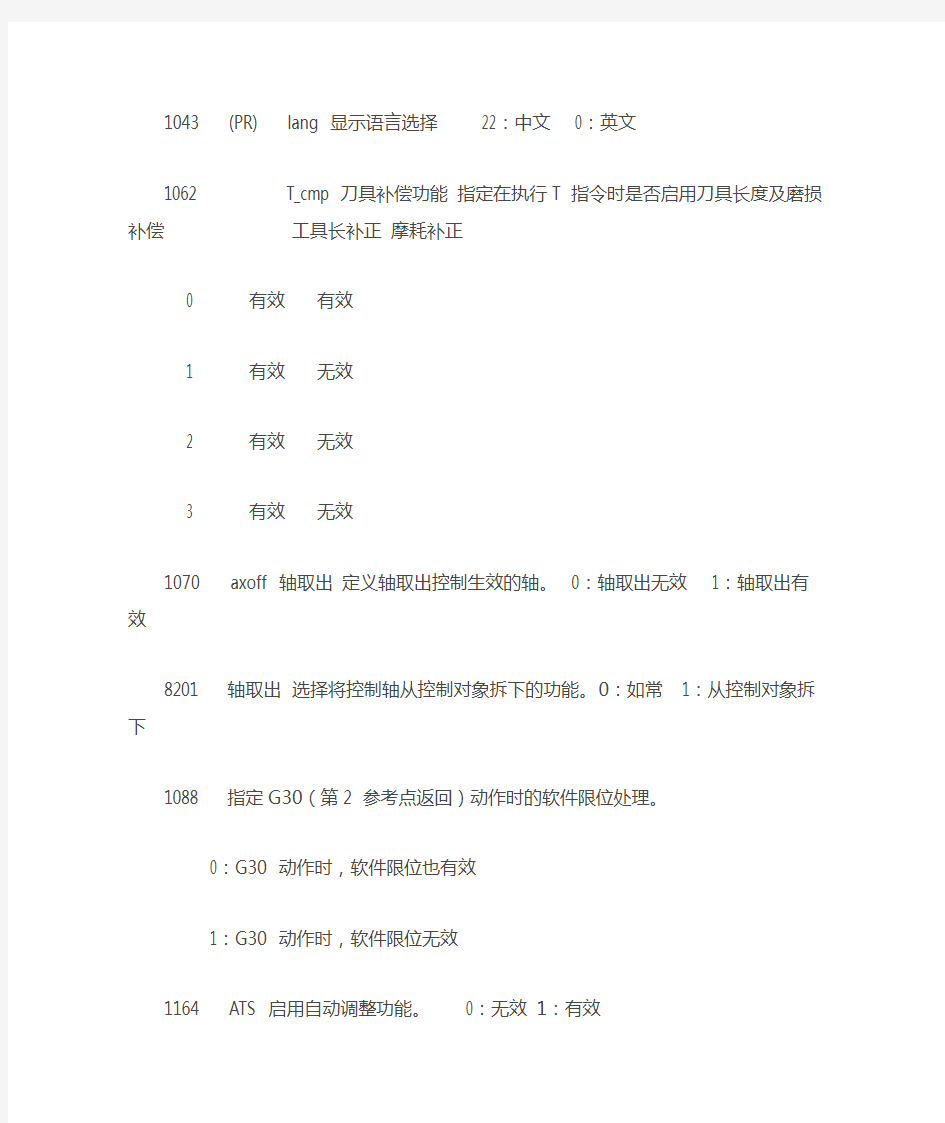
1043 (PR) lang 显示语言选择 22:中文 0:英文
1062 T_cmp 刀具补偿功能指定在执行T 指令时是否启用刀具长度及磨损补
偿工具长补正摩耗补正
0 有效有效
1 有效无效
2 有效无效
3 有效无效
1070 axoff 轴取出定义轴取出控制生效的轴。 0:轴取出无效 1:轴取出有效
8201 轴取出选择将控制轴从控制对象拆下的功能。0:如常 1:从控制对象拆下
1088 指定G30(第2 参考点返回)动作时的软件限位处理。
0:G30 动作时,软件限位也有效
1:G30 动作时,软件限位无效
1164 ATS 启用自动调整功能。 0:无效1:有效
1125 real_f 根据监控器画面的速度显示进行指定。0:指令速度 1:实际的移动速度1224 aux08 bit0:输出采样数据 0:无效 1:有效。
1267 (PR) 切换高速高精度的G 代码类型。0:往格式(G61.1) 1:三菱特殊格式(G08P1)1926 (PR) Global IP address设定主CPU 的IP 地址。设定从外部访问数控系统的IP 地址。
1930 (PR) Hostaddress主机地址设定主机端的IP 地址。
2001 rapid 快速进给速度
2002 clamp 切削进给钳制速度
2003 (PR) smgst 加减速模式 OO21
2011 G0back G0 快速进给模式下的移动指令或手动模式中,翻转方向时进行补偿的反向间隙量。
2012 G1back G1 切削模式中执行移动指令后,翻转方向时进行补偿的反向间隙量。2013 软件限位I-
2014 软件限位I+
2017 轴伺服增益 33
2025 G28rap G28 快速进给速度设定参考点返回指令中挡块式的快速进给速
2019 revnum 参考点返回顺序X :3 Y :2 Z: 1
2030 (PR) dir(-) 参考点方向 0:正方向 1:负方向
2037 G53ofs #1~#4 设定以基本机械坐标的0点为基点的第1,2,3,4 参考点
2038 #2_rfp 圆盘定刀点圆盘用P2
2039 #3_rfp 斗笠定刀点斗笠用P2 P3
2040 #4_rfp
2049 (PR) 指定绝对位置的原点对准方式。
0:非绝对位置检测
1:冲击方式(冲击机床或挡块)
2:参考点对准方式(对准标记)
3:挡块式(通过挡块或近点检测开关对准)
4:基准点对照方式Ⅱ(对准标记)
(对准后不进行栅格回退的类型)
9:简易绝对位置
(不检测绝对位置,但记忆断电时的位置)
仅当自动初始设置为碰压冲击方式时可用
2201 (PR) SV001 PC1 电机侧齿轮比
2202 (PR) SV002 PC2 机床侧齿轮比
2203 SV003 PGN 位置回路增益1。标准设定值为“33”。
2205 SV005 VGN1速度回路增益1 根据负载惯量的大小进行设定。设定值提高则控制精度提高,但是会易于发生振动。当发生振动时,下调20~30%
2011 G0back G0 设定在快速进给模式下移动指令或手动模式中翻转方向时进行补偿的反向间隙量。2012 G1back G1 设定在切削模式中执行移动指令后,翻转方向时进行补偿的反向间隙量。
2218 (PR) SV018 PIT 滚珠丝杠螺距设定滚珠丝杠的螺距。旋转轴设定为“360”。2220 (PR) SV020 RNG2编码器分辨率设定电机编码器每转的脉冲数。
OSA18 260
OSA105 1000
2225 (PR) SV025 MTYP 设定位置编码器类型、速度编码器类型以及电机类型。
MDS-D-SVJ3 系列: MDS-D-SPJ3 系列:
2236 (PR) SV036 PTYP 回生电阻 13032 (PR) SP032 PTYP再生电阻类型MDS-D/DH 系列
2236 设定供电单元类型(PR) SV036 PTYP
当将驱动单元的CN4 插头与电源供给单元连接时,必须进行如下的设
外部紧急停止无效外部紧急停止无效
CV-37 04 44 04 44
CV-75 08 48 08 48
CV-110 11 51 11 51
CV-185 19 59 19 59
CV-300 30 70 30 70
CV-370 37 77 37 77
CV-450 45 85 45 85
CV-550 55 95 - -
CV-750 - - 75 B5
2238 SV038 FHz1当发生机械振动时,设定抑制的振动频率。(80 以上生效)不使用时设定为“0”。
3001 slimt1 界限转速
3002 slimt2 设定相对于该齿轮电机最高转速的主轴转速。
3003 slimt3
3004 slimt4
3005 smax1 最高转速
3006 smax2 设定该齿轮的主轴最高转速。
3007 smax3
3008 smax4
3013 stap1 攻牙最高转速
3014 stap2
3015 stap3 设定该齿轮攻牙循环的主轴最高转速
3016 stap4
3021 sori 设定主轴定向转速。 0~32767
3022 sgear 主轴与编码器的齿轮比。0:1/1 1:1/2 2:1/4 3:1/8
3023 smini 最低转速设定齿轮最低转速。即使发出低于此值的S 指令,主轴仍将以该转速运转。3024 (PR) 设定所连接的主轴类型。0:不连接主轴。1:串行连接(总线)2~5:模拟输出
3025 (PR)主轴编码器的连接状况。0:无1:有(主轴编码器连接检查有效)2:编码器串行连接
3031 (PR) smcp_no 驱动单元I/F 通驱动单元通道数 1001-1010
3106 zrn_typ 原点返回规格 OO80
3107 ori_spd 定向指令速度定向指令时的主轴转速1~99999(r/min)
3108 ori_sft 定向就位偏置量设定定向的停止位置。-35999~35999(0.01°) 从负载端观察,顺时针方向为(-)方向
6449 11000011 Obit置1PLC定时器有效 1bit置1PLC计数器有效
6450 OOOOO101 位置1报警信息有效。特别注意。2bit置1操作信息有效
6451 OO11OOO1 ObitFO菜单有效 4,5bit1gx传PLC . 4bit置0,5bit置1gx传参数程序6473 OOO11111 操作面板闪烁不稳定
8109 上级通信选择对于RS-232C 端口,计算机链接B 的有效/无效。
0:计算机链接B 无效,通常的RS-232C 通信有效。
1:计算机链接B 有效,通常的RS-232C 通信无效
8112 G04P 小数点有效 0:禁用 1:启用
8202 软件限位无效 0:有效1:无效
8203 软件限位临时解除选择简易绝对位置方式(#2049 type 为9)时,接通电
源 0:有效(根据#8202)后,在进行最初的原点返回之前可禁用存储式极限IⅡⅡB、IB。 1:临时解除
8204 软件限位- 设定存储式极限Ⅱ的可动区域的(-)方向的坐标,或ⅡB 的禁区下限值坐标。
9102 装置0波特率设定串行通信的通信速度。0:19200 (bps)1:96002:48003:24004:12005:
9711: 主机1 主机名设定主计算机的名称。
9601 传输数据的速度。0:19200 (bps)1:96002:48003:24004:12005:6006:3007:1108:38400
13005 SP005 设定速度回路增益。增大设定值可提高控制精度,发生振动时,下调20~30%。
13026 (PR) SP026电机的最高速度。如果实际的电机转速超过设定的最高速度,则发出超速报警。
13031 (PR) SP031 MTYP 电机类型 2200
13032 (PR) SP032 PTYP 电源模块类型CN4 插头与电源供给单元连接时设定与2236
相同
驱动优化时各个IP设定:
1926: 192.168.200.1 GX软件IP 1930: 192.168.200.2 TCP/IP 1934: 192.168.100.1
11005: 192.168.100.2
9711: 192.168.0.1
G00 快速定位
G01 直线补间切削
G02 圆弧补间切削CW(顺时针)
G03 圆弧补间切削CCW(逆时针)
G02.3 指数函数补间正转
G03.3 指数函数补间逆转
G04 暂停
G05 高速高精度制御1
G05.1 高速高精度制御2
G06~G08没有
G07.1/107 圆筒补间
G09 正确停止检查
G10 程式参数输入/补正输入
G11 程式参数输入取消
G12 整圆切削CW
G13 整圆切削CCW
G12.1/112 极坐标补间有效
G13.1/113 极坐标补间取消
G14没有
G15 极坐标指令取消
G16 极坐标指令有效
G17 平面选择 X-Y
G18 平面选择 Y-Z
G19 平面选择 X-Z
G20 英制指令
G21 公制指令
G22-G26没有
G27 参考原点检查
G28 参考原点复归
G29 开始点复归
G30 第2~4参考点复归
G30.1 复归刀具位置1
G30.2 复归刀具位置2
G30.3 复归刀具位置3
G30.4 复归刀具位置4
G30.5 复归刀具位置5
G30.6 复归刀具位置6
G31 跳跃机能
G31.1 跳跃机能1
G31.2 跳跃机能2
G31.3 跳跃机能3
G32 没有
G33 螺纹切削
G34 特别固定循环(圆周孔循环)
G35 特别固定循环(角度直线孔循环)G36 特别固定循环(圆弧)
G37 自动刀具长测定
G37.1 特别固定循环(棋盘孔循环)
G38 刀具径补正向量指定
G39 刀具径补正转角圆弧补正
G40 刀具径补正取消
G41 刀具径补正左
G42 刀具径补正右
G40.1 法线制御取消
G41.1 法线制御左有效
G42.1 法线制御右有效
G43 刀具长设定(+)
G44 刀具长设定(—)
G43.1 第1主轴制御有效
G44.1 第2主轴制御有效
G45 刀具位置设定(扩张)
G46 刀具位置设定(缩小)
G47 刀具位置设定(二倍)
G48 刀具位置设定(减半)
G47.1 2主轴同时制御有效
G49 刀具长设定取消
G50 比例缩放取消
G51 比例缩放有效
G50.1 G指令镜象取消
G51.1 G指令镜象有效
G52 局部坐标系设定
G53 机械坐标系选择
G54 工件坐标系选择1
G55 工件坐标系选择2
G56 工件坐标系选择3
G57 工件坐标系选择4
G58 工件坐标系选择5
G59 工件坐标系选择6
G54.1 工件坐标系选择
扩张48组
G60 单方向定位
G61 正确停止检查模式
G61.1 高精度制御
G62 自动转角进给率调整
G63 攻牙模式
G63.1 同期攻牙模式(正攻牙)
G63.2 同期攻牙模式(逆攻牙)
G64 切削模式
G65 使用者巨集单一呼叫
G66 使用者巨集状态呼叫A
G66.1 使用者巨集状态呼叫B
G67 使用者巨集状态呼叫取消
G68 坐标回转有效
G69 坐标回转取消
G70 使用者固定循环
G71 使用者固定循环
G72 使用者固定循环
G73 固定循环(步进循环)
G74 固定循环(反向攻牙)
G75 使用者固定循环
G76 固定循环(精搪孔)
G77 使用者固定循环
G78 使用者固定循环
G79 使用者固定循环
G80 固定循环取消
G81 固定循环(钻孔/铅孔)
G82 固定循环(钻孔/计数式搪孔)G83 固定循环(深钻孔)
G84 固定循环(攻牙)
G85 固定循环(搪孔)
G86 固定循环(搪孔)
G87 固定循环(反搪孔)
G88 固定循环(搪孔)
G89 固定循环(搪孔)
G90 绝对值指令
G91 增量值指令
G92 机械坐标系设定
G93 逆时间进给
G94 非同期进给(每分进给)
G95 同期进给(每回转进给)
G96 周速一定制御有效
G97 周速一定至于取消
G98 固定循环起始点复归
G99 固定循环 R点复归G114.1 主轴同期制御
G100~225 使用者巨集(G码呼叫)最大10个
PICCX指令集及程序设计技巧
第二章PIC16C5X指令集及程序设计技巧 第一节 PIC16C5X指令概述 §2.1 PIC165X 指令概述 PIC16C5X每条指令长12位,指令由操作码和操作数组成。PIC16C5X共有33条指令,按操作分成三大类: 1. 面向字节操作类 2. 面向位操作类 3. 常数操作和控制操作类 全部指令如表2.1所示。 第二节 PIC16C5X 指令寻址方式 §2.2 PIC16C5X 指令寻址方式 PIC16C5X单片机寻址方式根据操作数的来源,可分为寄存器间接寻址、立即数寻址、直接寻址和位寻址四种。 一、寄存器间接寻址 这种寻址方式通过寄存器F0、F4来实现。实际的寄存器地址放在F4中,通过F0来进行间接寻址。 例: MOVLW 05H ; W=5 MOVWF 4 ; W(=5)→F4 MOVLW 55H ; W=55H
MOVWF 0 ; W(=55H)→F5 上面这段程序把55H送入F5寄存器。间址寻址方式主要用于编写查表、写表程序,非常方便。请参考§2.7程序设计技巧。 二、立即数寻址 这种方式就是操作数为立即数,可直接从指令中获取。 例:MOVLW 16H ; 16H →W 三、直接寻址 这种方式是对任何一寄存器直接寻址访问。对 16C52/54/55/56来说,寄存器地址(5位)直接包括在指令中。对PIC16C57,寄存器地址中高2位由(选Bank)由FSR<6:5>二位决定。 例: MOVWF 8 ; W→F8寄存器 MOVF 8,W ; F8→W 四、位寻址 这种寻址方式是对寄存器中的任一位(bit)进行操作。 例: BSF 11,0 ; 把F11的第0位置为"1"。 第三节面向字节操作类指令 §2.3 面向字节操作类指令
51单片机汇编指令速查表
51单片机汇编指令速查表 指令格式功能简述字节数周期 一、数据传送类指令 MOV A, Rn 寄存器送累加器 1 1 MOV Rn,A 累加器送寄存器 1 1 MOV A ,@Ri 内部RAM单元送累加器 1 1 MOV @Ri ,A 累加器送内部RAM单元 1 1 MOV A ,#data 立即数送累加器 2 1 MOV A ,direct 直接寻址单元送累加器 2 1 MOV direct ,A 累加器送直接寻址单元 2 1 MOV Rn,#data 立即数送寄存器 2 1 MOV direct ,#data 立即数送直接寻址单元 3 2 MOV @Ri ,#data 立即数送内部RAM单元 2 1 MOV direct ,Rn 寄存器送直接寻址单元 2 2 MOV Rn ,direct 直接寻址单元送寄存器 2 2 MOV direct ,@Ri 内部RAM单元送直接寻址单元 2 2 MOV @Ri ,direct 直接寻址单元送内部RAM单元 2 2 MOV direct2,direct1 直接寻址单元送直接寻址单元 3 2 MOV DPTR ,#data16 16位立即数送数据指针 3 2 MOVX A ,@Ri 外部RAM单元送累加器(8位地址) 1 2 MOVX @Ri ,A 累加器送外部RAM单元(8位地址) 1 2 MOVX A ,@DPTR 外部RAM单元送累加器(16位地址) 1 2 MOVX @DPTR ,A 累加器送外部RAM单元(16位地址) 1 2 MOVC A ,@A+DPTR 查表数据送累加器(DPTR为基址) 1 2 MOVC A ,@A+PC 查表数据送累加器(PC为基址) 1 2 XCH A ,Rn 累加器与寄存器交换 1 1 XCH A ,@Ri 累加器与内部RAM单元交换 1 1 XCHD A ,direct 累加器与直接寻址单元交换 2 1 XCHD A ,@Ri 累加器与内部RAM单元低4位交换 1 1 SWAP A 累加器高4位与低4位交换 1 1 POP direct 栈顶弹出指令直接寻址单元 2 2 PUSH direct 直接寻址单元压入栈顶 2 2 二、算术运算类指令 ADD A, Rn 累加器加寄存器 1 1
51单片机指令表汇总
51单片机指令表 助记符指令说明字节数周期数 (数据传递类指令) MOV A,Rn 寄存器内容传送到累加器 1 1 MOV A,direct 直接地址内容传送到累加器 2 1 MOV A,@Ri 间接RAM内容传送到累加器 1 1 MOV A,#data 立即数传送到累加器 2 1 MOV Rn,A 累加器内容传送到寄存器 1 1 MOV Rn,direct 直接地址内容传送到寄存器 2 2 MOV Rn,#data 立即数传送到寄存器 2 1 MOV direct,Rn 寄存器内容传送到直接地址 2 2 MOV direct,direct 直接地址传内容传送到直接地址 3 2 MOV direct,A 累加器内容传送到直接地址 2 1 MOV direct,@Ri 间接RAM内容传送到直接地址 2 2 MOV direct,#data 立即数传送到直接地址 3 2 MOV @Ri,A 累加器内容传送到间接RAM 1 1 MOV @Ri,direct 直接地址内容传送到间接RAM 2 2 MOV @Ri,#data 立即数传送到间接RAM 2 1 MOV DPTR,#data16 16 位地址传送到数据指针 3 2 MOVC A,@A+DPTR 代码字节传送到累加器 1 2 MOVC A,@A+PC 代码字节传送到累加器 1 2 MOVX A,@Ri 外部RAM(8位地址)内容传送到累加器 1 2 MOVX A,@DPTR 外部RAM(16位地址)内容传送到累加器 1 2 MOVX @Ri,A 累加器内容传送到外部RAM(8位地址) 1 2 MOVX @DPTR,A 累加器内容传送到外部RAM(16 地址) 1 2 PUSH direct 直接地址内容压入堆栈 2 2 POP direct 堆栈内容弹出到直接地址 2 2 XCH A,Rn 寄存器和累加器交换 1 1 XCH A, direct 直接地址和累加器交换 2 1
安川机器人命令一览所有指令介绍
安川机器人命令一览所有指令介绍 MOVJ功能以关节插补方式向示教位置移动。 添加项目位置数据、基座轴位置数据、 工装轴位置数据 画面中不显示 VJ=(再现速度)VJ:0.01~100.00% PL=(定位等级)PL:0~8 NWAIT UNTIL语句 ACC=(加速度调整比率)ACC:20~100% DEC=(减速度调整比率)DEC:20~100% 使用例MOVJ VJ=50.00PL=2NWAIT UNTIL IN#(16)=ON MOVL功能以直线插补方式向示教位置移动。 添加项目位置数据、基座轴位置数据、 工装轴位置数据 画面中不显示 V=(再现速度)、 VR=(姿态的再现速度)、 VE=(外部轴的再现速度) V:0.1~ 1500.0mm/秒 1~9000cm/分
R:0.1~180.0°/秒 VE:0.01~100.00% PL=(定位等级)PL:0~8 CR=(转角半径)CR:1.0~6553.5mm NWAIT UNTIL语句 ACC=(加速度调整比率)ACC:20~100% DEC=(减速度调整比率)DEC:20~100% 使用例MOVL V=138PL=0NWAIT UNTIL IN#(16)=ON MOVC功能用圆弧插补形式向示教位置移动。 添加项目位置数据、基座轴位置数据、 工装轴位置数据 画面不显示 V=(再现速度)、VR=(姿态的再现速度)、 VE=(外部轴的再现速度) 与MOVL相同。 PL=(定位等级)PL:0~8 NWAIT ACC=(加速度调整比率)ACC:20~100% DEC=(减速度调整比率)DEC:20~100%使用例MOVC V=138PL=0NWAIT 10基本命令一览
MCS-51指令速查表
MCS—51指令速查表 PSW寄存器 C AC FO RSI RSO OV—P n=0,1,2,3,4,5,6,7;i=0,1 指令操作说明 MOV x,y ;x←y ,A,direct←Rn,@Rj,direct,#data ; Rn,@Ri←A,direct,#data DPTR←#data ; c y?bit MOVX x,y ;x←y ,A?@Ri , @DPTR MOVC x,y ;x←y,A←@A+DPTR , @A+PC XCH x,y ;x<= =>y,A<= =>Rn , @Ri , direct XCHD x,y ;A低四<= =>@Rj低四 SWAP A;A低四<= =>A低四 PUSH direct ;加1压入 POP direct ;弹出减1 ADD x,y ;x←x+y,x=A,y≡Rn,@Ri , direct , #data * ADDC x,y ;x←x+y+cy,x=A,y≡Rn,@Ri , direct , #data * SUBB x,y ;x←x-y-cy,x=A,y≡Rn,@Ri , direct , #data * INC x ;x←x+1,x≡A,Rn , @Ri , direct , DPTR DEC x ;x←x-1,x≡A,Rn , @Ri , direct DA A;对A进行十进制调整 MUL AB ;BA←A×B DIV AB ;A/B,A←商,B←余 ANL x,y ;x←x∧y x=A,y≡Rn,@Ri , direct , #data; * x≡direct , y≡A,#data ORL x,y ;x←x∨y x=A,y≡Rn,@Ri , direct , #data; * x≡direct , y ≡A,#data XRL x,y ;x←x○+y x=A,y≡Rn,@Ri , direct , #data; * x≡direct , y ≡A,#data CPL A;A←A— CLR A;A←0 RL A;Cy RR A;Cy RLC A; RRC A;
(完整版)CAD最常用命令大全(实用版)
cad命令大全 L, *LINE 直线 ML, *MLINE 多线(创建多条平行线) PL, *PLINE 多段线 PE, *PEDIT 编辑多段线 SPL, *SPLINE 样条曲线 SPE, *SPLINEDIT 编辑样条曲线 XL, *XLINE 构造线(创建无限长的线) A, *ARC 圆弧 C, *CIRCLE 圆 DO, *DONUT 圆环 EL, *ELLIPSE 椭圆 PO, *POINT 点 DCE, *DIMCENTER 中心标记 POL, *POLYGON 正多边形 REC, *RECTANG 矩形 REG, *REGION 面域 H, *BHATCH 图案填充 BH, *BHATCH 图案填充 -H, *HATCH HE, *HATCHEDIT 图案填充...(修改一个图案或渐变填充)SO, *SOLID 二维填充(创建实体填充的三角形和四边形)*revcloud 修订云线 *ellipse 椭圆弧 DI, *DIST 距离 ME, *MEASURE 定距等分 DIV, *DIVIDE 定数等分
DT, *TEXT 单行文字 T, *MTEXT 多行文字 -T, *-MTEXT 多行文字(命令行输入) MT, *MTEXT 多行文字 ED, *DDEDIT 编辑文字、标注文字、属性定义和特征控制框ST, *STYLE 文字样式 B, *BLOCK 创建块... -B, *-BLOCK 创建块...(命令行输入) I, *INSERT 插入块 -I, *-INSERT 插入块(命令行输入) W, *WBLOCK “写块”对话框(将对象或块写入新图形文件)-W, *-WBLOCK 写块(命令行输入) -------------------------------------------------------------------------------- AR, *ARRAY 阵列 -AR, *-ARRAY 阵列(命令行输入) BR, *BREAK 打断 CHA, *CHAMFER 倒角 CO, *COPY 复制对象 CP, *COPY 复制对象 E, *ERASE 删除 EX, *EXTEND 延伸 F, *FILLET 圆角 M, *MOVE 移动 MI, *MIRROR 镜像 LEN, *LENGTHEN 拉长(修改对象的长度和圆弧的包含角)
单片机指令表(最全)
单片机指令以A开头的指令有18条,分别为: 1、ACALL addr11 指令名称:绝对调用指令 指令代码:A10 A9 A8 10001 A7 A6 A5 A4 A3 A2 A1 A0 指令功能:构造目的地址,进行子程序调用。其方法是以指令提供的11位地址(al0~a0),取代PC的低11位,PC的高5位不变。操作内容: PC←(PC)+2SP←(SP)+1 (SP)←(PC)7~0 SP←(SP)+1 (SP)←(PC)15~8 PC10~0←addrl0~0 字节数: 2 机器周期:2 使用说明:由于指令只给出子程序入口地址的低11位,因此调用范围是2KB。 2、ADD A,Rn 指令名称:寄存器加法指令指令代码:28H~2FH 指令功能:累加器内容与寄存器内容相加 操作内容:A←(A)+(Rn),n=0~7 字节数: 1 机器周期;1 影响标志位:C,AC,OV 3、ADD A,direct 指令名称:直接寻址加法指令指令代码:25H 指令功能:累加器内容与内部RAM单元或专用寄存器内容相加操作内容:A←(A)+(direct) 字节数: 2 机器周期:1 影响标志位:C,AC,OV 4、ADD A,@Ri ’ 指令名称:间接寻址加法指令指令代码:26H~27H 指令功能:累加器内容与内部RAM低128单元内容相加 操作内容:A←(A)+((Ri)),i=0,1 字节数: 1 机器周期:1 影响标志位:C,AC,OV 5、ADD A,#data 指令名称:立即数加法指令指令代码:24H 指令功能:累加器内容与立即数相加 操作内容:A←(A)+data 字节数: 2 机器周期:1 影响标志位:C,AC,OV 6、ADDC A,Rn 指令名称:寄存器带进位加法指令指令代码:38H~3FH 指令功能:累加器内容、寄存器内容和进位位相加 操作内容:A←(A)+(Rn)+(C),n=0~7 影响标志位:C,AC,OV 7、ADDC A,direct 指令名称:直接寻址带进位加法指令指令代码:35H 指令功能:累加器内容、内部RAM低128单元或专用寄存器内容与进位位加 操作内容:A←(A)+(direct)+(C) 字节数: 2 机器周期:1 影响标志位:C,AC,OV 8、ADDC A,@Ri 指令名称:间接寻址带进位加法指令指令代码:36H~37H 指令功能:累加器内容, 内部RAM低128单元内容及进位位相加操作内容:A←(A)+((Ri))+(C),i=0,1 字节数: 1 机器周期:1 影响标志位:C,AC,OV 9、ADDC A,#data 指令名称:立即数带进位加法指令指令代码:34H 指令功能:累加器内容、立即数及进位位相加 操作内容:A←(A)+data+(C) 字节数: 2 机器周期:1 影响标志位:C,AC,OV 10、AJMP addr11 指令名称:绝对转移指令 指令代码:A10 A9 A8 1 0 0 0 1 A7 A6 A5 A4 A3 A2 A1 A0 指令功能:构造目的地址,实现程序转移。其方法是以指令提供的11位地址,取代PC的低11位,.而PC的高5位保持不变。操作内容:PC←(PC)+2PCl0~0←addrll 字节数: 2 机器周期:2 使用说明:由于addrll的最小值是000H,最大值是7FFH,因此地址转移范围是2KB。 11、ANL A,Rn 指令名称:寄存器逻辑与指令指令代码:58H~5FH 指令功能:累加器内容逻辑与寄存器内容 操作内容:A←(A)∧(Rn),n=0~7 字节数: 1 机器周期:1 12、ANL A,direct 指令名称:直接寻址逻辑与指令指令代码:55H 指令功能:累加器内容逻辑与内部RAM低128单元或专用寄存器内容 操作内容:A←(A)
命令一览表
VI 命令一览表 进入vi的命令 vi filename :打开或新建文件,并将光标置于第一行首 vi +n filename :打开文件,并将光标置于第n行首 vi + filename :打开文件,并将光标置于最后一行首 vi +/pattern filename:打开文件,并将光标置于第一个与pattern匹配的串处 vi -r filename :在上次正用vi编辑时发生系统崩溃,恢复filename vi filename....filename :打开多个文件,依次进行编辑 移动光标类命令 h 或 Backspace::光标左移一个字符 l 或 space::光标右移一个字符 k 或 Ctrl+p:光标上移一行 j 或Enter或 Ctrl+n :光标下移一行w :光标右移一个字至字首 W :光标右移一个字至字首,忽略标点符号 b 或 B :光标左移一个字至字首 e 或 E :光标右移一个字至字尾 ) :光标移至句尾 ( :光标移至句首 }:光标移至段落开头 {:光标移至段落结尾 nG:光标移至第n行首 n+:光标下移n行 n-:光标上移n行 n$:光标移至第n行尾 H :光标移至屏幕顶行 M :光标移至屏幕中间行 L :光标移至屏幕最后行 0:(注意是数字零)光标移至当前行首 $:光标移至当前行尾 屏幕翻滚类命令 Ctrl+u:向文件首翻半屏 Ctrl+d:向文件尾翻半屏 Ctrl+f:向文件尾翻一屏 Ctrl+b;向文件首翻一屏 nz:将第n行滚至屏幕顶部,不指定n时将当前行滚至屏幕顶部。插入文本类命令 i :在光标前 I :在当前行首 a:光标后 A:在当前行尾 o:在当前行之下新开一行 O:在当前行之上新开一行
51单片机指令表
此表主要是为了方便大家查阅每条指令的作用,写法以及字节数和周期数,建议大家保存为书签。 助记符指令说明字节数周期数 (数据传递类指令) MOV A,Rn 寄存器传送到累加器 1 1 MOV A,direct 直接地址传送到累加器 2 1 MOV A,@Ri 累加器传送到外部RAM(8 地址) 1 1 MOV A,#data 立即数传送到累加器 2 1 MOV Rn,A 累加器传送到寄存器 1 1 MOV Rn,direct 直接地址传送到寄存器 2 2 MOV Rn,#data 累加器传送到直接地址 2 1 MOV direct,Rn 寄存器传送到直接地址 2 1 MOV direct,direct 直接地址传送到直接地址 3 2 MOV direct,A 累加器传送到直接地址 2 1 MOV direct,@Ri 间接RAM 传送到直接地址 2 2 MOV direct,#data 立即数传送到直接地址 3 2 MOV @Ri,A 直接地址传送到直接地址 1 2 MOV @Ri,direct 直接地址传送到间接RAM 2 1 MOV @Ri,#data 立即数传送到间接RAM 2 2 MOV DPTR,#data16 16 位常数加载到数据指针 3 1 MOVC A,@A+DPTR 代码字节传送到累加器 1 2 MOVC A,@A+PC 代码字节传送到累加器 1 2 MOVX A,@Ri 外部RAM(8 地址)传送到累加器 1 2 MOVX A,@DPTR 外部RAM(16 地址)传送到累加器 1 2 MOVX @Ri,A 累加器传送到外部RAM(8 地址) 1 2 MOVX @DPTR,A 累加器传送到外部RAM(16 地址) 1 2 PUSH direct 直接地址压入堆栈 2 2 POP direct 直接地址弹出堆栈 2 2 XCH A,Rn 寄存器和累加器交换 1 1
cmd命令大全
ls显示文件或目录 -l 列出文件详细信息l(list) -a 列出当前目录下所有文件及目录,包括隐藏的a(all) mkdir 创建目录 -p 创建目录,若无父目录,则创建p(parent) cd 切换目录 touch 创建空文件 echo 创建带有内容的文件。 cat 查看文件内容 cp 拷贝 mv 移动或重命名 rm 删除文件 -r 递归删除,可删除子目录及文件 -f 强制删除 find 在文件系统中搜索某文件 wc 统计文本中行数、字数、字符数 grep 在文本文件中查找某个字符串 rmdir 删除空目录 tree 树形结构显示目录,需要安装tree包 pwd 显示当前目录 ln 创建链接文件 more、less 分页显示文本文件内容 head、tail 显示文件头、尾内容 ctrl+alt+F1 命令行全屏模式 系统管理命令 stat 显示指定文件的详细信息,比ls更详细
who 显示在线登陆用户 whoami 显示当前操作用户 hostname 显示主机名 uname 显示系统信息 top 动态显示当前耗费资源最多进程信息 ps 显示瞬间进程状态 ps -aux du 查看目录大小 du -h /home带有单位显示目录信息 df 查看磁盘大小 df -h 带有单位显示磁盘信息 ifconfig 查看网络情况 ping 测试网络连通 netstat 显示网络状态信息 man 命令不会用了,找男人如:man ls clear 清屏 alias 对命令重命名如:alias showmeit="ps -aux" ,另外解除使用unaliax showmeit kill 杀死进程,可以先用ps 或 top命令查看进程的id,然后再用kill命令杀死进程。 打包压缩相关命令 gzip: bzip2: tar: 打包压缩 -c 归档文件 -x 压缩文件 -z gzip压缩文件 -j bzip2压缩文件 -v 显示压缩或解压缩过程 v(view) -f 使用档名
单片机指令大全
一、数据传输指令 ─────────────────────────── ──────────── 在存贮器和寄存器、寄存器和输入输出端口之间传送数据. 1. 通用数据传送指令. MOV 传送字或字节. MOVX 调用片外数据 MOVC调用片内数据. PUSH 把字压入堆栈. POP 把字弹出堆栈. SWAP 交换8位寄存器里字节的顺序 XCHG 交换字或字节.( 至少有一个操作数为寄存器,段寄存器不可作为操作数) XLAT 字节查表转换. 2. 输入输出端口传送指令. IN I/O端口输入. ( 语法: IN 累加器, {端口号│DX} ) OUT I/O端口输出. ( 语法: OUT {端口号│DX},累加器) 输入输出端口由立即方式指定时, 其范围是0-255; 由寄存器DX 指定时, 其范围是0-65535. 二、算术运算指令 ─────────────────────────── ──────────── ADD 加法. ADC 带进位加法. INC 加1. DAA 加法的十进制调整. SUB 减法. SBB 带借位减法. DEC 减1. NEC 求反(以0 减之). CMP 比较.(两操作数作减法,仅修改标志位,不回送结果). AAS 减法的ASCII码调整. DAS 减法的十进制调整. MUL 无符号乘法. IMUL 整数乘法. 以上两条,结果回送AH和AL(字节运算),或DX和AX(字运算), DIV 无符号除法. IDIV 整数除法. 三、逻辑运算指令 ─────────────────────────── ──────────── AND 与运算. or 或运算. XOR 异或运算. NOT 取反. ROL 循环左移. ROR 循环右移. RCL 通过进位的循环左移. RCR 通过进位的循环右移. 以上四种移位指令,其移位次数可达255次. 五、程序转移指令 ─────────────────────────────────────── 1>无条件转移指令(长转移) JMP 无条件转移指令 CALL 过程调用 RET/RETF过程返回. 2>条件转移指令(短转移,-128到+127的距离内) ( 当且仅当(SF XOR OF)=1时,OP1
excel命令大全
Excel函数大全 数据库和清单管理函数 DA VERAGE 返回选定数据库项的平均值 DCOUNT 计算数据库中包含数字的单元格的个数 DCOUNTA 计算数据库中非空单元格的个数 DGET 从数据库中提取满足指定条件的单个记录 DMAX 返回选定数据库项中的最大值 DMIN 返回选定数据库项中的最小值 DPRODUCT 乘以特定字段(此字段中的记录为数据库中满足指定条件的记录)中的值 DSTDEV 根据数据库中选定项的示例估算标准偏差 DSTDEVP 根据数据库中选定项的样本总体计算标准偏差 DSUM 对数据库中满足条件的记录的字段列中的数字求和 DV AR 根据数据库中选定项的示例估算方差 DV ARP 根据数据库中选定项的样本总体计算方差 GETPIVOTDA TA 返回存储在数据透视表中的数据 日期和时间函数 DATE 返回特定时间的系列数 DATEDIF 计算两个日期之间的年、月、日数 DATEV ALUE 将文本格式的日期转换为系列数 DAY 将系列数转换为月份中的日 DAYS360 按每年360 天计算两个日期之间的天数 EDATE 返回在开始日期之前或之后指定月数的某个日期的系列数 EOMONTH 返回指定月份数之前或之后某月的最后一天的系列数 HOUR 将系列数转换为小时 MINUTE 将系列数转换为分钟 MONTH 将系列数转换为月 NETWORKDAYS 返回两个日期之间的完整工作日数 NOW 返回当前日期和时间的系列数 SECOND 将系列数转换为秒 TIME 返回特定时间的系列数 TIMEV ALUE 将文本格式的时间转换为系列数 TODAY 返回当天日期的系列数 WEEKDAY 将系列数转换为星期 WORKDAY 返回指定工作日数之前或之后某日期的系列数 YEAR 将系列数转换为年 YEARFRAC 返回代表start_date(开始日期)和end_date(结束日期)之间天数的以年为单位的分数DDE 和外部函数 CALL 调用动态链接库(DLL) 或代码源中的过程 REGISTER.ID 返回已注册的指定DLL 或代码源的注册ID SQL.REQUEST 连接外部数据源,并从工作表中运行查询,然后将结果作为数组返回,而无需进行宏编程。有关CALL 和REGISTER 函数的其他信息 工程函数 BESSELI 返回经过修改的贝塞尔函数In(x) BESSELJ 返回贝塞尔函数Jn(x)
单片机指令表(最全)
. ;.. 单片机指令以A 开头的指令有18条,分别为: 1、ACALL addr11 指令名称:绝对调用指令 指令代码:A10 A9 A8 10001 A7 A6 A5 A4 A3 A2 A1 A0 指令功能:构造目的地址,进行子程序调用。其方法是以指令提供的11位地址(al0~a0),取代PC 的低11位,PC 的高5位不变。 操作内容: PC←(PC)+2 SP←(SP)+1 (SP)←(PC)7~0 SP←(SP)+1 (SP)←(PC)15~8 PC10~0←addrl0~0 字节数: 2 机器周期:2 使用说明:由于指令只给出子程序入口地址的低11位,因此调用 范围是2KB 。 2、ADD A ,Rn 指令名称:寄存器加法指令 指令代码:28H ~2FH 指令功能:累加器内容与寄存器内容相加 操作内容:A←(A)+(Rn), n =0~7 字节数: 1 机器周期;1 影响标志位:C ,AC ,OV 3、ADD A ,direct 指令名称:直接寻址加法指令 指令代码:25H 指令功能:累加器内容与内部RAM 单元或专用寄存器内容相加 操作内容:A←(A)+(direct) 字节数: 2 机器周期:1 影响标志位:C ,AC ,OV 4、ADD A ,@Ri ’ 指令名称:间接寻址加法指令 指令代码:26H ~27H 指令功能:累加器内容与内部RAM 低128单元内容相加 操作内容:A←(A)+((Ri)), i =0,1 字节数: 1 机器周期:1 影响标志位:C ,AC ,OV 5、ADD A ,#data 指令名称:立即数加法指令 指令代码:24H 指令功能:累加器内容与立即数相加 操作内容:A←(A)+data 字节数: 2 机器周期:1 影响标志位:C ,AC ,OV 6、ADDC A ,Rn 指令名称:寄存器带进位加法指令 指令代码:38H ~3FH 指令功能:累加器内容、寄存器内容和进位位相加 操作内容:A←(A)+(Rn)+(C), n =0~7 字节数: 1 机器周期:1 影响标志位:C ,AC ,OV 7、ADDC A ,direct 指令名称:直接寻址带进位加法指令 指令代码:35H 指令功能:累加器内容、内部RAM 低128单元或专用寄存器内 容与进位位加 操作内容:A←(A)+(direct)+(C) 字节数: 2 机器周期:1 影响标志位:C ,AC ,OV 8、ADDC A ,@Ri 指令名称:间接寻址带进位加法指令 指令代码:36H ~37H 指令功能:累加器内容, 内部RAM 低128单元内容及进位位相加 操作内容:A←(A)+((Ri))+(C), i =0,1 字节数: 1 机器周期:1 影响标志位:C ,AC ,OV 9、ADDC A ,#data 指令名称:立即数带进位加法指令 指令代码:34H 指令功能:累加器内容、立即数及进位位相加 操作内容:A←(A)+data+(C) 字节数: 2 机器周期:1 影响标志位:C ,AC ,OV 10、AJMP addr11 指令名称:绝对转移指令 指令代码:A10 A9 A8 1 0 0 0 1 A7 A6 A5 A4 A3 A2 A1 A0 指令功能:构造目的地址,实现程序转移。其方法是以指令提供的11位地址,取代PC 的低11位,.而PC 的高5位保持不变。 操作内容:PC←(PC)+2 PCl0~0←addrll 字节数: 2 机器周期:2 使用说明:由于addrll 的最小值是000H ,最大值是7FFH ,因此地址转移范围是2KB 。 11、ANL A ,Rn 指令名称:寄存器逻辑与指令 指令代码:58H ~5FH 指令功能:累加器内容逻辑与寄存器内容 操作内容:A←(A)∧(Rn), n =0~7 字节数: 1 机器周期:1 12、ANL A ,direct 指令名称:直接寻址逻辑与指令 指令代码:55H 指令功能:累加器内容逻辑与内部RAM 低128单元或专用寄存 器内容 操作内容:A←(A)∧(diret) 字节数: 2 机器周期:1
C语言基础-符号、指令表
C语言基础-符号、指令表
姓名:[张魏] 联系电话:[10086] 联系地址:[中州大学]
auto :声明自动变量一般不使用 double :声明双精度变量或函数 int:声明整型变量或函数 struct:声明结构体变量或函数 break:跳出当前循环 else :条件语句否定分支(与 if 连用) long :声明长整型变量或函数 switch :用于开关语句 case:开关语句分支 enum :声明枚举类型 register:声明积存器变量 typedef:用以给数据类型取别名(当然还有其他作用) char :声明字符型变量或函数 extern:声明变量是在其他文件正声明(也可以看做是引用变量)return :子程序返回语句(可以带参数,也看不带参数)union:声明联合数据类型 const :声明只读变量 float:声明浮点型变量或函数 short :声明短整型变量或函数 unsigned:声明无符号类型变量或函数 continue:结束当前循环,开始下一轮循环 for:一种循环语句(可意会不可言传) signed:生命有符号类型变量或函数 goto do if
注解://—单行注解;/*多行注解*/
typedef struct{ 数据类型变量序列1; 数据类型变量序列1; ... }自定义数据类型的名称; 保留字 _a t_,a l i e n,b d a t a,b r e a k,b i t,c a s e,c h a r,c o d e,c o m p a c t,c o n s t,c o n t i n u e,d a t a, d e f a u l t,d o,d o u b l e,f a r,e l s e,e n u m,e x t e r n,f l o a t,f o r,g o t o,i f,f u n c u s e d,i d a t a,i n t, i n l i n e,i n t e r r u p t,l a r g e,l o n g,p d a t a,_p r i o r i t y_,r e e n t r a n t,r e t u r n,s b i t,s f r,s f r16, s h o r t,s i g e n d,s i z e o f,s m a l l,s t a t i c,s t r u c t,s w i t c h c_t a s k_,t y p e d e f,u s i n g, u n i o n, u n s i g n e d,v o i d,v o l a t i l e,w h i l e,x d a t a
windows命令大全
Windows命令大全 1. gpedit.msc-----组策略 2. sndrec32-------录音机 3. Nslookup-------IP地址侦测器 4. explorer-------打开资源管理器 5. logoff---------注销命令 6. tsshutdn-------60秒倒计时关机命令 7. lusrmgr.msc----本机用户和组 8. services.msc---本地服务设置 9. oobe/msoobe /a----检查XP是否激活 10. notepad--------打开记事本 11. cleanmgr-------垃圾整理 12. net start messenger----开始信使服务 13. compmgmt.msc---计算机管理 14. net stop messenger-----停止信使服务 15. conf-----------启动netmeeting 16. dvdplay--------DVD播放器 17. charmap--------启动字符映射表 18. diskmgmt.msc---磁盘管理实用程序 19. calc-----------启动计算器 20. dfrg.msc-------磁盘碎片整理程序
21. chkdsk.exe-----Chkdsk磁盘检查 22. devmgmt.msc--- 设备管理器 23. regsvr32 /u *.dll----停止dll文件运行 24. drwtsn32------ 系统医生 25. rononce -p ----15秒关机 26. dxdiag---------检查DirectX信息 27. regedt32-------注册表编辑器 28. Msconfig.exe---系统配置实用程序 29. rsop.msc-------组策略结果集 30. mem.exe--------显示内存使用情况 31. regedit.exe----注册表 32. winchat--------XP自带局域网聊天 33. progman--------程序管理器 34. winmsd---------系统信息 35. perfmon.msc----计算机性能监测程序 36. winver---------检查Windows版本 37. sfc /scannow-----扫描错误并复原 38. taskmgr-----任务管理器(2000/xp/2003 39. winver---------检查Windows版本 40. wmimgmt.msc----打开windows管理体系结构(WMI) 41. wupdmgr--------windows更新程序 42. wscript--------windows脚本宿主设置
MCS-51系列单片机指令表
MCS-51系列单片机指令A表 MCS-51系列单片机指令以A开头的指令有18条,分别为: 1、ACALL addr11 指令名称:绝对调用指令 指令代码: 指令功能:构造目的地址,进行子程序调用。其方法是以指令提供的11位地址(al0~a0), 取代PC的低11位,PC的高5位不变。 操作内容: PC←(PC)+2 SP←(SP)+1 (SP)←(PC)7~0 SP←(SP)+1 (SP)←(PC)15~8 PC10~0←addr l0~0 字节数: 2 机器周期:2
使用说明:由于指令只给出子程序入口地址的低11位,因此调用范围是2KB。 2、ADD A,Rn 指令名称:寄存器加法指令 指令代码:28H~2FH 指令功能:累加器内容与寄存器内容相加 操作内容:A←(A)+(Rn), n=0~7 字节数: 1 机器周期;1 影响标志位:C,AC,OV 3、ADD A,direct 指令名称:直接寻址加法指令 指令代码:25H 指令功能:累加器内容与内部RAM单元或专用寄存器内容相加 操作内容:A←(A)+(direct) 字节数: 2 机器周期:1 影响标志位:C,AC,OV 4、ADD A,@Ri ’ 指令名称:间接寻址加法指令 指令代码:26H~27H 指令功能:累加器内容与内部RAM低128单元内容相加 操作内容:A←(A)+((Ri)), i=0,1 字节数: 1 机器周期:1
5、ADD A,#data 指令名称:立即数加法指令 指令代码:24H 指令功能:累加器内容与立即数相加 操作内容:A←(A)+data 字节数: 2 机器周期:1 影响标志位:C,AC,OV 6、ADDC A,Rn 指令名称:寄存器带进位加法指令 指令代码:38H~3FH 指令功能:累加器内容、寄存器内容和进位位相加 操作内容:A←(A)+(Rn)+(C), n=0~7 字节数: 1 机器周期:1 影响标志位:C,AC,OV 7、ADDC A,direct 指令名称:直接寻址带进位加法指令 指令代码:35H 指令功能:累加器内容、内部RAM低128单元或专用寄存器内容与进位位加操作内容:A←(A)+(direct)+(C) 字节数: 2 机器周期:1
单片机汇编语言指令查表
目录 表1 寻址方式与相应的寻址空间 (2) 1.1数据传送指令MOV (2) 1.2程序存储器取数据指令MOVX,MOVC (3) 1.3 数据交换指令XCH,XCHD,SWAP (3) 1.4 逻辑运算指令ANL,ORL(按位进行) (4) 续表1.4 逻辑运算指令XRL CLR CPL RL RLC RR RRC(按位进行) (5) 1.5 控制转移指令LJMP AJMP SJMP JMP JZ JNZ CJNE (6) 续表1.5 控制转移指令DJNZ LCALL ACALL RET RETI NOP (7) 1.6 布尔处理(位操作)指令CLR SETB CPL ANL ORL (8) 续表1.6 布尔处理(位操作)指令JC JNC JB JNB JBC (9) 1.7堆栈操作指令PUSH POP (10) 2.MCS-51系列单片机算术运算指令表ADD ADDC SUBB INC DEC MUL DIV DA (10)
表1 寻址方式与相应的寻址空间 1.1数据传送指令MOV 方式 利用的变量 使用的空间 寄存器 R0∽R7,A ,B ,CY ,DPTR 直接寻址 direct 片内RAM 低128字节特殊功能寄存器SFR 寄存器间址 @Ro ,@R1 SP @R0,@R1,@DPTR 片内RAM 片外RAM 立即数 #data 程序存储器 基址加变址 @A+PC @A+DPTR 程序存储器 相对寻址 PC+rel 程序存储器 位寻址 bit 片内RAM 的20H ∽2FH 部分SFR 目的操作数 汇编指令 机器码 功能 字节数 机器 周期 A 累加器 立即数送A MOV A ,#data 74H data data 传至A 2 1 内部RAM 或SFR 内容送A MOV A ,direct E5H direct (direct)传至A 2 1 寄存器内容送A MOV A ,Rn (n=0∽7) E8H ∽EFH 11101rrr (Rn)传至A 1 1 内部RAM 内容送A MOV A ,@Ri (i=0,1) 1110011i ((Ri))传至A 1 1 Direct 内部RAM 或SFR 立即数送内部RAM 或SFR MOV direct ,#data 75H direct data data 传至direct 3 2 内部RAM 和SFR 直接直接传送 MOV direct ,direct 85H direct direct (direct)传至direct 3 2 累加器内容送内部RAM 或SFR MOV direct ,A F5H direct (A)传至direct 2 1 寄存器内容送内部RAM 或SFR MOV direct ,Rn (n=0∽7) 10001rrr direct (Rn)传至direct 2 2 内部RAM 内容送内部RAM 或SFR MOV direct ,@Ri (i=0,1) 1000011i direct ((Ri))传至direct 2 2 Rn 寄存器 立即数送寄存器 MOV Rn,#data (n=0∽7) 01111rrr data data 传至Rn 2 1 内部RAM 或SFR 内容送寄存器 MOV Rn,direct (n=0∽7) 10101rrr direct (direct)传至Rn 2 2 累加器内容送寄存器 MOV Rn,A (n=0∽7) 11111rrr (A)传至Rn 1 2 @Ri 内部RAM 立即数送内部RAM MOV @Ri,#data (i=0,1) 0111011i data data 传至(Ri) 2 1 内部RAM 或SFR 内容送内部RAM MOV @Ri,direct (i=0,1) 1010011i direct (direct)传至(Ri) 2 2 累加器内容送内部RAM MOV @Ri,A (i=0,1) 1111011i (A)传至(Ri) 1 1 DPTR 16位立即数传送指令 MOV DPTR,#data16 90H dataH dataL data16传至DPTR 3 2