阀控非对称缸液压伺服系统建模与仿真分析
煤矿机械
Coal Mine Machinery
Vol.32No.10Oct.2011
第32卷第10期2011年10月
引言
随着水下机器人技术的不断发展,水下机器人的作业范围和作业水深不断增加。在恶劣的海洋环境下,要完成复杂的水下作业任务,水下机器人上搭载的机械手的作用显得尤为重要。没有机械手,水下机器人充其量只是一个观察探测台架。目前,水下机械手多为液压驱动关节式,主要包括线性关节和转动关节,线性关节主要依靠直线液压缸的伸缩实现有限范围内的摆动,转动关节则依靠液压马达实现有限范围的转动或连续回转,每个关节都可以通过液压伺服系统精确控制,实现机械手自身的作业动作。
阀控非对称缸是水下液压机械手的重要驱动环节,由于其结构的不对称及非线性等特点,可能产生跳跃谐振或等幅振荡,直接影响整个机械手液压伺服系统的动态特性。本文主要研究水下液压机械手线性关节的阀控非对称缸位置伺服系统,在具体分析阀控非对称缸控制特性的基础上进行动态特性的推导、建模及仿真,为各线性关节伺服控制系统的设计和分析提供参考。
1阀控非对称液压缸位置伺服系统建模
以非对称液压缸为研究对象,进行动态特性分
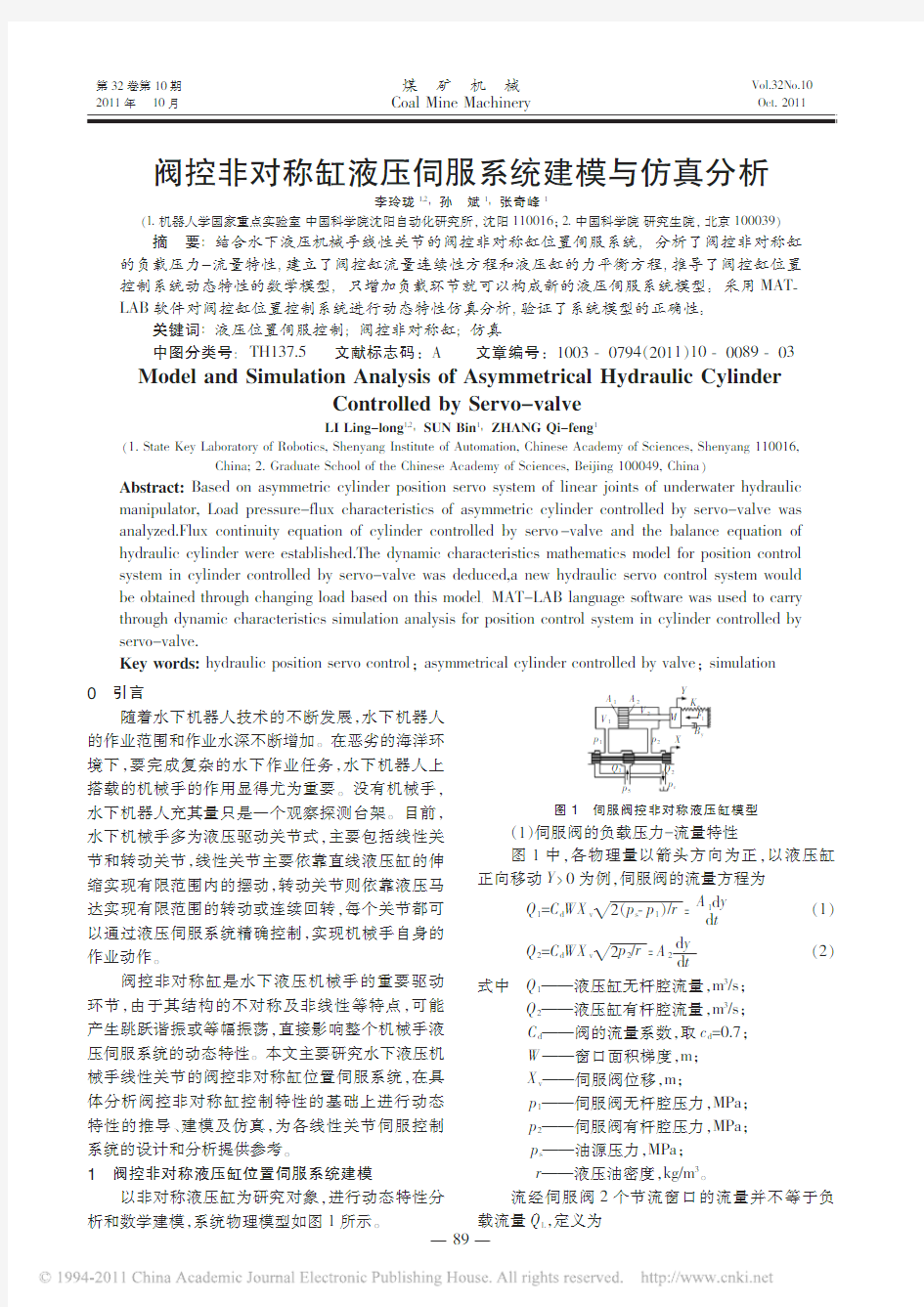
析和数学建模,系统物理模型如图1所示。
图1
伺服阀控非对称液压缸模型
(1)伺服阀的负载压力-流量特性
图1中,各物理量以箭头方向为正,以液压缸正向移动Y >0为例,伺服阀的流量方程为
Q 1=C d WX v 2(p s -p 1)/r 姨=A 1d y
(1)Q 2=C d WX v 2p 2/r 姨=A 2d y
d t
(2)式中Q 1———液压缸无杆腔流量,m 3/s ;
Q 2———
液压缸有杆腔流量,m 3/s ;C d ———
阀的流量系数,取c d =0.7;W ———
窗口面积梯度,m ;X v ———
伺服阀位移,m ;p 1———
伺服阀无杆腔压力,MPa ;p 2———
伺服阀有杆腔压力,MPa ;p s ———
油源压力,MPa ;r ———
液压油密度,kg/m 3。流经伺服阀2个节流窗口的流量并不等于负载流量Q L ,定义为
阀控非对称缸液压伺服系统建模与仿真分析
李玲珑
1,2
,孙斌1,张奇峰1
(1.机器人学国家重点实验室中国科学院沈阳自动化研究所,沈阳110016;2.中国科学院研究生院,北京100039)
摘要:结合水下液压机械手线性关节的阀控非对称缸位置伺服系统,分析了阀控非对称缸的负载压力-流量特性,建立了阀控缸流量连续性方程和液压缸的力平衡方程,推导了阀控缸位置控制系统动态特性的数学模型,只增加负载环节就可以构成新的液压伺服系统模型。采用MAT -LAB 软件对阀控缸位置控制系统进行动态特性仿真分析,验证了系统模型的正确性。
关键词:液压位置伺服控制;阀控非对称缸;仿真中图分类号:TH137.5文献标志码:A 文章编号:1003-0794(2011)10-0089-03
Model and Simulation Analysis of Asymmetrical Hydraulic Cylinder
Controlled by Servo-valve
LI Ling-long 1,2,SUN Bin 1,ZHANG Qi-feng 1
(1.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,
China;2.Graduate School of the Chinese Academy of Sciences,Beijing 100049,China )
Abstract:Based on asymmetric cylinder position servo system of linear joints of underwater hydraulic manipulator,Load pressure-flux characteristics of asymmetric cylinder controlled by servo-valve was analyzed.Flux continuity equation of cylinder controlled by servo -valve and the balance equation of hydraulic cylinder were established.The dynamic characteristics mathematics model for position control system in cylinder controlled by servo-valve was deduced,a new hydraulic servo control system would be obtained through changing load based on this model .MAT-LAB language software was used to carry through dynamic characteristics simulation analysis for position control system in cylinder controlled by servo-valve.
Key words:hydraulic position servo control ;asymmetrical cylinder controlled by valve ;simulation p 1
p 2
p 5A 2
A 1V 2
V 1
Q 2Q 1
p r
X M B y
K e F l Y
89
Q L =Q 1+Q 22
=hC d WX v (p s -p L )/r 姨(3)
其中,h =(1+R )/2(1+R 3
)姨,R=A 2/A 1。
鉴于液压系统正常工作时,活塞大部分时间在稳态工作点附近微动,因此,在工作点附近泰勒级数展开,流量方程线性化为
Q L =K x X v -K p p L
(4)
式中
K x ———
阀流量系数,K x =hC d W p s -p L 姨
;K p ———
流量-压力系数,K p =hC d WX v 2r (p s -p L )
姨;p L ———
负载压力,p L =p 1-p 2R 。(2)阀控液压缸流量连续性方程
Q L =C tp p L +A m d Y +V e e d p L
(5)
式中
C tp ———
总泄漏系数;A m ———
活塞平均面积,A m =A 1+A 22
,m 2;V e ———
液压缸等效容积,V e =2(V 1+V 2R 2
),m 3。(3)非对称液压缸和负载的力平衡方程
p 1A 1-p 2A 2=M d 2
Y d t 2+B y d Y d t
+K y Y+F L
(6)式中M ———活塞及负载的总质量,kg ;
B y ———
活塞及负载的黏性阻尼系数,kg/s ;K y ———
负载的弹簧刚度,N/m ;F L ———
作用在活塞上的外负载,N 。将式(6)化简可得
p L =(M d 2
Y d t 2+B y d Y d t
+K y Y+F L )/A 1
(7)(4)阀控非对称缸的位移数学模型
将式(4)、式(5)和式(7)进行拉普拉斯变换,然
后联立可得阀控非对称缸的位移数学模型式为
(8)2位置闭环控制系统动态特性分析(1)位置闭环控制系统传递函数
在位置控制系统中,将油缸位移作为输出量
时,可以忽略弹性负载,即K e =0;另外总的系数K t (K t =K p +C tp )很小,黏性摩擦系数B y 一般也很小,则
B y K t /A 1<<1,忽略不计,整个传递函数可以化简为Y (s )=K x A m X (s )-K t A m A 1(1+V e s 4b e K t
)F L
(s )
s (s 2
h +2x h h
s +1)(9)
式中
w h ———
液压固有频率,w h =4b e A 1A m e 姨
;
x h ———
液压阻尼比x h =K t b e M /(V e A 1A m )姨+B y V e /(b e MA 1A m )姨/4
式(9)表明,液压机械手驱动液压缸的输出位
移受伺服阀开口及外负载影响,则系统模型方块图如图2所示。
图2系统模型框图
结合图2的系统模型框图,对液压机械手的线
性关节而言,液压机械手的关节由2个相对运动的构件采用铰接形成,将直线非对称液压缸首尾的耳
环分别铰接在关节的两构件上,通过阀控非对称液压缸的伸缩实现所需要的运动角度,然后由液压缸内置传感器完成位置信息反馈。整个位置闭环控制系统原理如图3所示。整个闭环系统的环路增益为K v =G AMP G SV G CYL G FB
(10)
式中
G AMP ———
放大器增益,mA/V ;G SV ———
伺服阀增益,m 3/s ;G CYL ———
液压缸增益,m 2;G FB ———
电位计反馈增益,V /m 。图3伺服位置控制系统原理
1.非对称缸
2.负载
3.电位器
4.放大器
5.电液伺服阀
如图2、图3所示,当外负载F L =0时,只需改变
外负载就可以构成不同的伺服系统,适应不同的线性关节需求,如液压机械手肩关节左右摆动、俯仰肩关节上下俯仰、肘关节上下俯仰、腕关节上下俯仰等,均可以在此基础上进行动态分析。因此,F L =0时液压缸阀控系统动态特性是整个线性关节位置伺服系统的核心。当外负载F L =0时,伺服阀芯开口直接决定液压缸的输出位移,整个位置闭环系统的方块图如图4所示。
图4位置闭环系统控制框图
(2)位置闭环控制系统传递函数中参数的确定在液压机械手线性关节的位置闭环控制系统中,每个关节所采用的非对称液压缸、伺服阀、电位计都一样。以肩关节上下俯仰为例对参数进行初始化,液压缸无杆腔截面积A 1=1.55×10-3m 2,有杆腔截
Y (s )=[K x X v (s )-K t A 1(1+V e s 4b e K t )F L (s )]/[V e M s 3
4b e A 1+(MK t A 1
+
V e B y 4b e A 1)s 2+(B y K t A 1+V e K e 4b e A 1+A m
)s +K t K e A 1
]
1
234
5
输入
F L (s )Y (s )X (s )
K 1A m A 1V s s 4βs K 1
1+K x A m
s 21w h
2s s +1w h 2ξh
-+
()()
U o
U f
U f
G AMP
G SF G FB
G CYL
K x A m s s 2
w h 2s +1w h 2ξh -++()+90
面积A 2=9.78×10-4m 2,行程L =95mm 。负载总质量
M =100kg ;活塞及负载的黏性阻尼系数B y =2×105kg/s ;液体的体积弹性模量b e =700MPa ;C tp =1.5×10-10m 3/(s ·Pa )为总流量压力系数;G AMP =3mA/V 为放大器增益;G SV =2×10-6(m 3/s )/mA 为伺服阀增益;液压缸增益G CYL =645m 2;电位计反馈增益G FB =200V/m ,将数据带入图4的方框图进行仿
真分析。
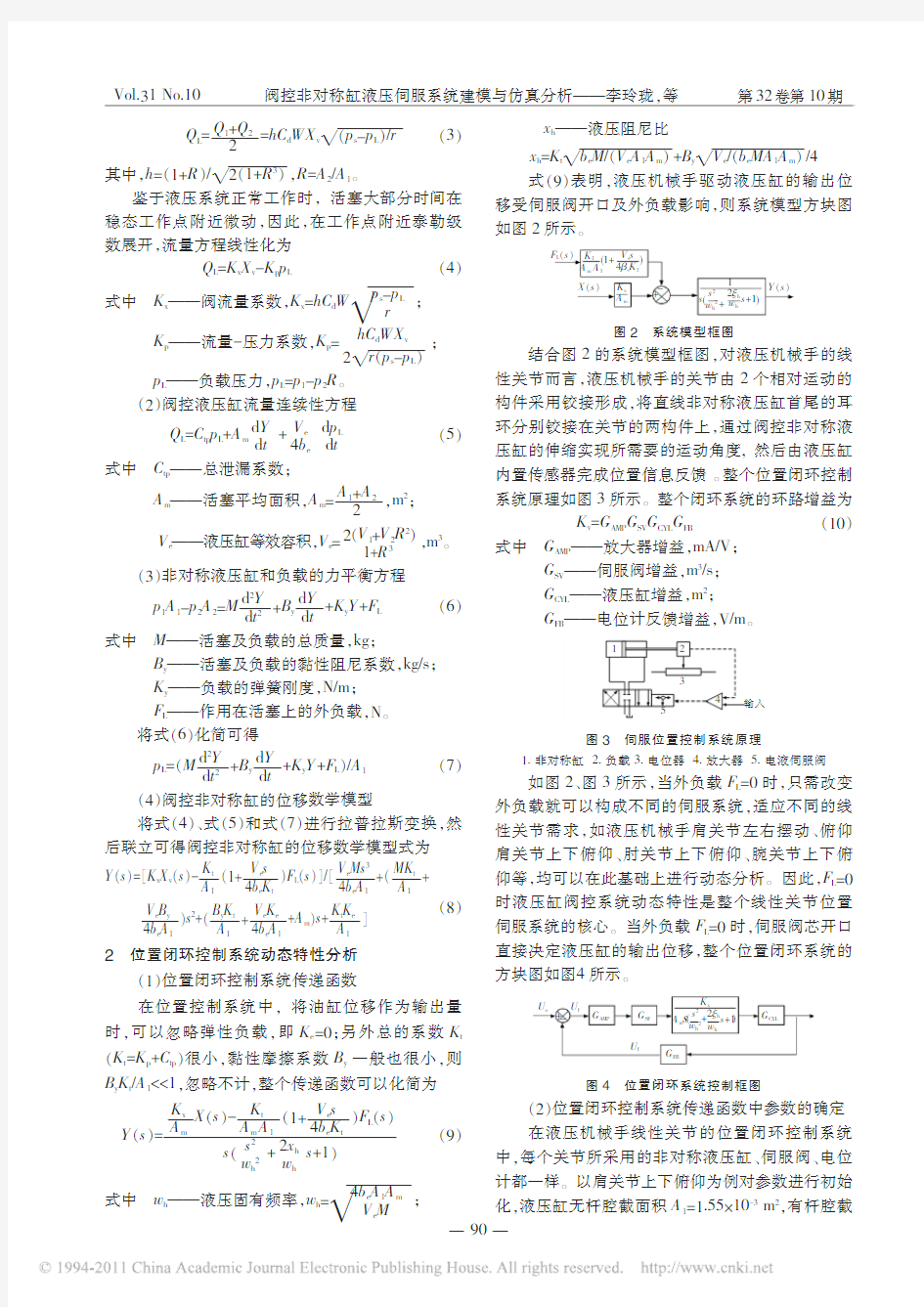
(3)位置闭环控制系统的仿真分析
在整个闭环系统中,由于伺服阀放大器具有可调的增益设定值,伺服系统的环路增益就会有所变化。为了使建立的模型具有更好的适应性,在仿真的过程中将系统的环路增益K v 设定成3个不同的值进行了对比分析。利用Matlab 软件编程可以得到系统的开环Bode 图和闭环阶跃响应图(见图5和图6)。
频率/(rad/sec )
图5
Bode 图
1.1.6K V 仿真曲线
2.K V 仿真曲线
3.0.4K V 仿真曲线
图6阶跃响应
1.1.6K V 仿真曲线
2.K V 仿真曲线
3.0.4K V 仿真曲线
如表1所示,根据初始参数得出的环路增益K v
代入系统仿真表明,系统响应迅速,具有相当的稳定裕值储备,所建立的系统模型可以完全满足系统的动态性能,具有一定应用价值。
同时,对比图4和图5可以得出,在系统其他
结构参数一定的情况下,系统的环路增益K v 直接影响系统的动态特性,增大环路增益K v 可以提高系统的响应速度,但幅值和相位裕度降低,系统超调量增大,导致稳定性有所下降。因此,在实际的工程应用中,要注意控制位置伺服系统的环路增益,以免对系统的动态性能造成过大的影响。
表1
系统性能指标
注:M p 为超调量,T p 为峰值时间,T r 为上升时间,K g 为幅值裕度,γ为相位裕度。
3结语
在充分考虑整个伺服阀控非对称缸非线性的
基础上,结合具体的简化物理模型和液压缸内部特性,详细推导了阀控非对称缸动态特性的数学模型,从而为整个位置伺服系统总体模型的建立提供了重要的理论依据。以肩关节俯仰为例,采用
Matlab 软件编程对所建立的模型进行仿真,结果表
明系统响应迅速,具有足够的稳定裕值储备,验证了系统模型的正确性,并指出了环路增益对系统动
态性能的影响。同时,为具体设计各个线性关节的伺服控制系统建立了蓝本,具有十分重要的工程应用价值。
参考文献:
[1]蒋新松,封锡盛,王棣棠.水下机器人[M ].沈阳:辽宁科学技术出
版社,2000.
[2]章艳.压力适应型深海水下液压机械手及主从式多关节复合控制研
究[D ].杭州:浙江大学,2006.
[3]王勇勤,张云飞,严兴春,等.伺服阀非线性特性建模的液压弯辊系
统动态特性[J ].重庆大学学报(自然科学版),2005,28(11):5-7.[4]梁利华.液压传动与电液伺服系统[M ].哈尔滨:哈尔滨工业大学
出版社,2005.
[5]杨逢瑜.电液伺服与电液比例控制技[M ].北京:清华大学出版社,
2009.
[6]杨叔子,杨克冲.机械控制工程基础[M ].武汉:华中科技大学出
版社,2005.
[7]吴志清.四通阀控非对称液压缸伺服系统的动态特性[J ].煤矿
机械,2004,25(7):32-35.
作者简介:李玲珑(1986-),湖北孝感人,中国科学院沈阳自动化研究所在读研究生,从事水下机器人技术方面的学习研究,电子信箱:lill@https://www.360docs.net/doc/a411069249.html,.
责任编辑:卢盛春收稿日期:2011-01-04
0.4K v K v 1.6K v
M p /s 5.2%23.7%36.9%T P /s 0.0320.0170.013T r /s 0.0150.0070.005T S /s 0.0440.0400.042K g /DB 26.2619.2615.14γ/°634433
时域分析
环路增益
频率分析
-20幅值/d B
020
40-40-90
相位/d e g
-135-180-22510
1
102
103
1
2
3
版权声明:
本刊已许可中国学术期刊(光盘版)电子杂志社在中国知网及其系列数据库产品中以数字化方式复制、汇编、发行、信息网络传播本刊全文。该社著作权使用费与本刊稿酬一并支付。作者向本刊提交文章发表的行为即视为同意我社上述声明。
煤矿机械杂志社2011年7月12日
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
振幅/d B
0.40.02t /s
0.60.81.0
1.21.40.2
0.040.060.080.100.120.140.160.180.20
03
21
91
非对称液压缸的动态特性仿真研究_郝前华
第35卷第6期 2010年12月 广西大学学报:自然科学版J o u r n a l o f G u a n g x i U n i v e r s i t y :N a t S c i E d V o l .35N o .6D e c .2010 收稿日期:2010-07-22;修订日期:2010-08-29 基金项目:国家863项目资助课题(2003A A 430200) 通讯联系人:何清华(1946-),男,湖南岳阳人,中南大学教授,博士生导师;E -m a i l :h q h @m a i l .c s u .e d u .c n 。 文章编号:1001-7445(2010)06-0984-05非对称液压缸的动态特性仿真研究 郝前华1,何清华1,2,贺继林1,2,廖力达1,舒敏飞1 (1.中南大学机电工程学院,湖南长沙410083; 2.湖南山河智能机械股份有限公司,湖南长沙410100) 摘要:根据液流的连续性原理,通过对非对称液压缸进行受力分析,研究非对称液压缸的动态特性。在此基础 上,提出非对称液压缸的数学模型,得到了液压缸阻尼比、固有频率间的关系。根据其数学模型,运用M A T -L A B 软件对挖掘机铲斗液压缸动态特性进行仿真,得到了非对称液压缸的速度响应曲线和大腔的压力曲线, 直观地揭示了其动态特性。通过对影响铲斗液压缸动态特性的主要因素的分析,提出了加快其速度响应和改 善其运动平稳性的实用措施,指出降低铲斗液压缸的超调量与提高铲斗液压缸的响应速度存在矛盾,需要针 对具体情况协调考虑。 关键词:动态特性;非对称液压缸;仿真 中图分类号:T H 137 文献标识码:A S i m u l a t i o ns t u d y o nd y n a m i c c h a r a c t e r i s t i c s o f a s y m m e t r i c a l h y d r a u l i c c y l i n d e r H A OQ i a n -h u a 1,H EQ i n g -h u a 1,2,H EJ i -l i n 1,2,L I A OL i -d a 1,S H UM i n -f e i 1 (1.S c h o o l o f M e c h a n i c a l a n dE l e c t r i c a l E n g i n e e r i n g ,C e n t r a l S o u t hU n i v e r s i t y ,C h a n g s h a 410083,C h i n a ; 2.H u n a nS u n w a r dI n t e l l i g e n t M a c h i n e r y C o .L t d .,C h a n g s h a 410100,C h i n a )A b s t r a c t :O nt h eb a s i s o f c o n t i n u i t y p r i n c i p l eo f f l u i d s ,d y n a m i cc h a r a c t e r i s t i c s o f a s y m m e t r i c a l h y d r a u l i c c y l i n d e r a r e i n v e s t i g a t e db y m e a n s o f f o r c e e q u i l i b r i u m a n a l y s i s .B a s e d o nt h e p r o p o s e d m a t h e m a t i c a l m o d e l o f t h e c y l i n d e r ,r e l a t i o n s h i pb e t w e e nd a m p i n gr a t i o a n dn a t u r a l f r e q u e n c y i s o b t a i n e d a s w e l l a s t h e s i m u l a t i o nr e s u l t s o f d y n a m i cc h a r a c t e r i s t i c s o f h y d r a u l i cc y l i n d e r o f t h e b u c k e t o f a n e x c a v a t o r i n M A T L A B .T h e v e l o c i t y r e s p o n s e c u r v e a n d p r e s s c u r v e o f t h e l a r g e c h a m - b e r r e v e a l t h e d y n a m i c c h a r a c t e r i s t i c s v i s u a l l y .M e a s u r e s t oi n c r e a s e t h e v e l o c i t y r e s p o n s e a n dt o i m p r o v e t h e m o t i o n s t a b i l i t y o f t h e b u c k e t c y l i n d e r a r e p r o p o s e d b a s e d o n t h e a n a l y s i s o f t h e m a i n f a c t o r s i n f l u e n c i n gd y n a m i cc h a r a c t e r i s t i c s .T h ec o n t r a d i c t i o nb e t w e e nd e c r e a s i n go v e r s h o o t a n d i n c r e a s i n g r e s p o n s e s p e e d o f t h e c y l i n d e r n e e d s t o b e r e s o l v e d b y c o n s i d e r a t i o n s t o s p e c i f i c c i r c u m - s t a n c e s . K e y w o r d s :d y n a m i c c h a r a c t e r i s t i c s ;a s y m m e t r i c a l h y d r a u l i c c y l i n d e r ;s i m u l a t i o n 非对称液压缸具有结构紧凑、工作可靠及生产成本低等优点,因而广泛应用于车辆、工程机械、矿山机械等的液压系统中。非对称液压缸作为液压系统的主要执行元件,其动态特性是评价液压系统性能 的一个重要指标[1-3]。非对称液压缸在输入流量或负载发生变化时,输出压力会发生变化,活塞就会出
阀控非对称缸液压伺服系统建模与仿真分析
煤矿机械 Coal Mine Machinery Vol.32No.10Oct.2011 第32卷第10期2011年10月 引言 随着水下机器人技术的不断发展,水下机器人的作业范围和作业水深不断增加。在恶劣的海洋环境下,要完成复杂的水下作业任务,水下机器人上搭载的机械手的作用显得尤为重要。没有机械手,水下机器人充其量只是一个观察探测台架。目前,水下机械手多为液压驱动关节式,主要包括线性关节和转动关节,线性关节主要依靠直线液压缸的伸缩实现有限范围内的摆动,转动关节则依靠液压马达实现有限范围的转动或连续回转,每个关节都可以通过液压伺服系统精确控制,实现机械手自身的作业动作。 阀控非对称缸是水下液压机械手的重要驱动环节,由于其结构的不对称及非线性等特点,可能产生跳跃谐振或等幅振荡,直接影响整个机械手液压伺服系统的动态特性。本文主要研究水下液压机械手线性关节的阀控非对称缸位置伺服系统,在具体分析阀控非对称缸控制特性的基础上进行动态特性的推导、建模及仿真,为各线性关节伺服控制系统的设计和分析提供参考。 1阀控非对称液压缸位置伺服系统建模 以非对称液压缸为研究对象,进行动态特性分 析和数学建模,系统物理模型如图1所示。 图1 伺服阀控非对称液压缸模型 (1)伺服阀的负载压力-流量特性 图1中,各物理量以箭头方向为正,以液压缸正向移动Y >0为例,伺服阀的流量方程为 Q 1=C d WX v 2(p s -p 1)/r 姨=A 1d y (1)Q 2=C d WX v 2p 2/r 姨=A 2d y d t (2)式中Q 1———液压缸无杆腔流量,m 3/s ; Q 2——— 液压缸有杆腔流量,m 3/s ;C d ——— 阀的流量系数,取c d =0.7;W ——— 窗口面积梯度,m ;X v ——— 伺服阀位移,m ;p 1——— 伺服阀无杆腔压力,MPa ;p 2——— 伺服阀有杆腔压力,MPa ;p s ——— 油源压力,MPa ;r ——— 液压油密度,kg/m 3。流经伺服阀2个节流窗口的流量并不等于负载流量Q L ,定义为 阀控非对称缸液压伺服系统建模与仿真分析 李玲珑 1,2 ,孙斌1,张奇峰1 (1.机器人学国家重点实验室中国科学院沈阳自动化研究所,沈阳110016;2.中国科学院研究生院,北京100039) 摘要:结合水下液压机械手线性关节的阀控非对称缸位置伺服系统,分析了阀控非对称缸的负载压力-流量特性,建立了阀控缸流量连续性方程和液压缸的力平衡方程,推导了阀控缸位置控制系统动态特性的数学模型,只增加负载环节就可以构成新的液压伺服系统模型。采用MAT -LAB 软件对阀控缸位置控制系统进行动态特性仿真分析,验证了系统模型的正确性。 关键词:液压位置伺服控制;阀控非对称缸;仿真中图分类号:TH137.5文献标志码:A 文章编号:1003-0794(2011)10-0089-03 Model and Simulation Analysis of Asymmetrical Hydraulic Cylinder Controlled by Servo-valve LI Ling-long 1,2,SUN Bin 1,ZHANG Qi-feng 1 (1.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016, China;2.Graduate School of the Chinese Academy of Sciences,Beijing 100049,China ) Abstract:Based on asymmetric cylinder position servo system of linear joints of underwater hydraulic manipulator,Load pressure-flux characteristics of asymmetric cylinder controlled by servo-valve was analyzed.Flux continuity equation of cylinder controlled by servo -valve and the balance equation of hydraulic cylinder were established.The dynamic characteristics mathematics model for position control system in cylinder controlled by servo-valve was deduced,a new hydraulic servo control system would be obtained through changing load based on this model .MAT-LAB language software was used to carry through dynamic characteristics simulation analysis for position control system in cylinder controlled by servo-valve. Key words:hydraulic position servo control ;asymmetrical cylinder controlled by valve ;simulation p 1 p 2 p 5A 2 A 1V 2 V 1 Q 2Q 1 p r X M B y K e F l Y 89