wincc与PLCSIM实现电机启停控制
系统:Win7 64位旗舰版
软件:Wincc v7.0 sp3 中文STEP7 v5.5 sp2 中文PLCSIM v5.4 sp5 中文
第一步:通讯
通讯是难点,只要建立了wincc和plcsim的通讯,后面组态就容易了。
1.建立step7项目。在选择plc时,要选择带有TCP/IP协议通讯口的plc,否则就要增加通讯板卡
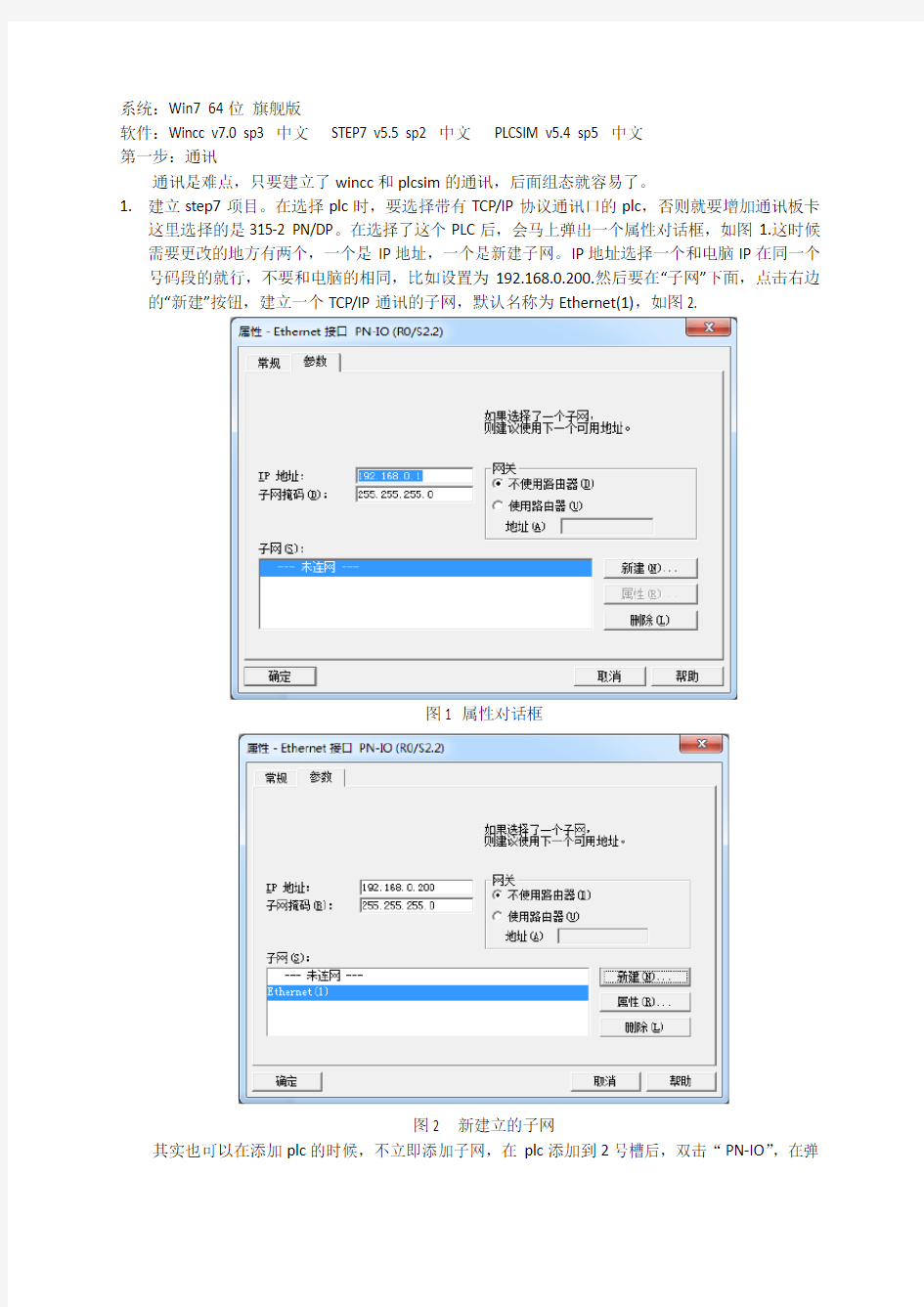
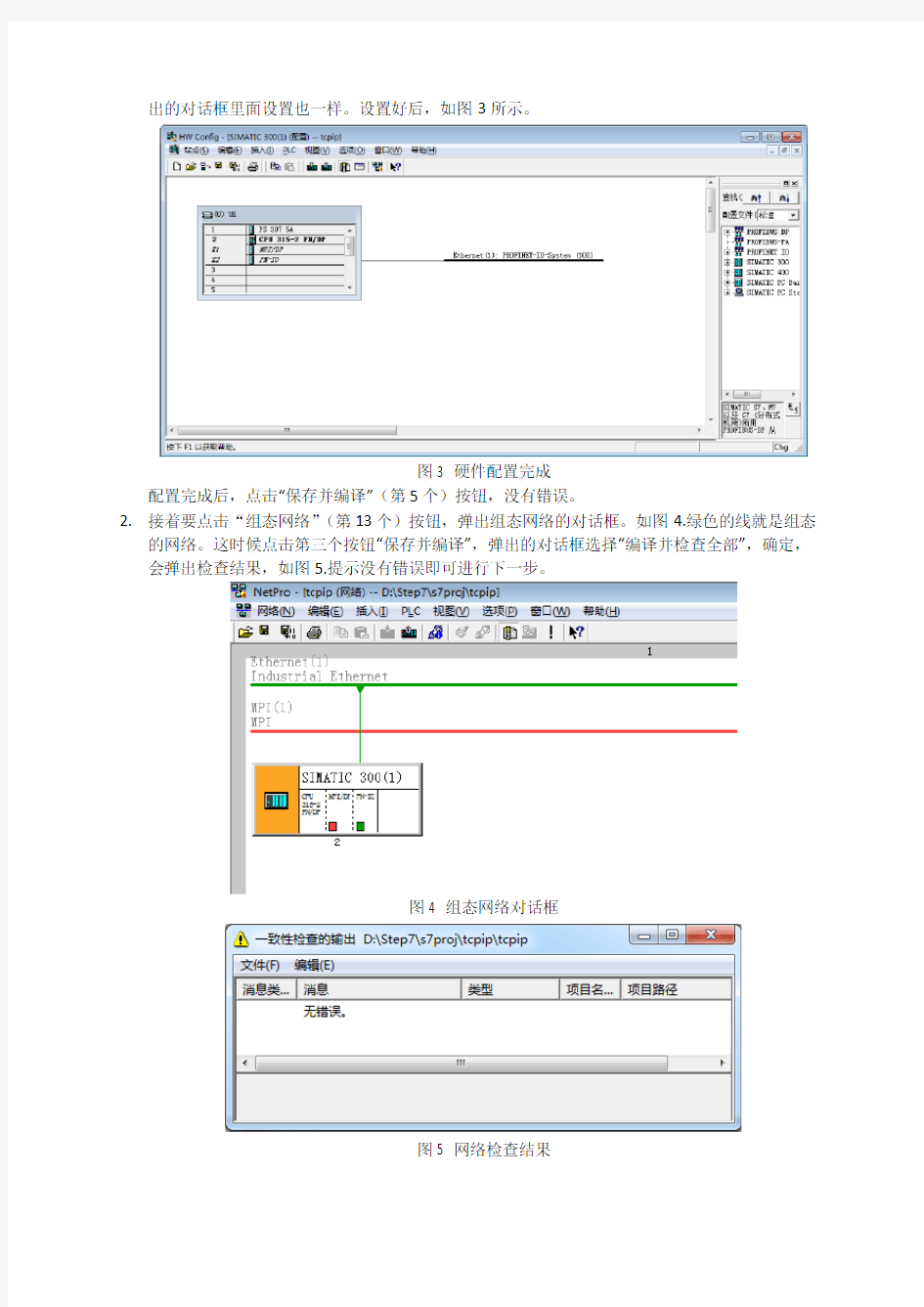
这里选择的是315-2 PN/DP。在选择了这个PLC后,会马上弹出一个属性对话框,如图1.这时候需要更改的地方有两个,一个是IP地址,一个是新建子网。IP地址选择一个和电脑IP在同一个号码段的就行,不要和电脑的相同,比如设置为192.168.0.200.然后要在“子网”下面,点击右边的“新建”按钮,建立一个TCP/IP通讯的子网,默认名称为Ethernet(1),如图2.
图1 属性对话框
图2 新建立的子网
其实也可以在添加plc的时候,不立即添加子网,在plc添加到2号槽后,双击“PN-IO”,在弹
出的对话框里面设置也一样。设置好后,如图3所示。
图3 硬件配置完成
配置完成后,点击“保存并编译”(第5个)按钮,没有错误。
2.接着要点击“组态网络”(第13个)按钮,弹出组态网络的对话框。如图4.绿色的线就是组态
的网络。这时候点击第三个按钮“保存并编译”,弹出的对话框选择“编译并检查全部”,确定,会弹出检查结果,如图5.提示没有错误即可进行下一步。
图4 组态网络对话框
图5 网络检查结果
3.打开plcsim。检查PC/PG接口是不是正确的。如图6,显示的为”PLCSIM(TCP/IP)”,即为正确的配
置,这时候其实打开step7的PC/PG接口配置,也已经是同样的了。如果不是的话,要改成一致的。
图6 打开plcsim
4.下载。首先是下载网络。将鼠标放在刚才组态的网络上,点击绿色的点,这时候,上面“下载”
的按钮才能够进行操作,否则是灰色的,如图7。点击“下载”。然后下载硬件组态。机架为0,槽号为2,IP地址为192.168.0.200,在下载硬件组态的时候也会显示出来,如图8。回到项目主页面,鼠标选择300plc站点,也下载进plcsim中。
5.打开wincc,新建项目,“单用户项目”即可。右击“变量管理”,选择“添加新的驱动程序”,如图
9.这里是和西门子300plc通讯,因此选择如图10所示的SIMATIC S7 Protocol Suite.chn。
图7 下载网络
图8 下载硬件组态
图9 添加驱动程序
图10 选择驱动
6.安装完成后,打开子目录,找到TCP/IP,右击,在弹出的对话框中选择“系统参数”,如图11所
示。在弹出的对话框中,先进入“单位”目录,然后在“逻辑设备名称”中选择“PLCSIM.TCPIP.1”,如图12所示。确定。在按下“确定”之后,会提示重启项目,确定,然后自动关闭项目,自己再打开。
图11 选择系统参数
图12 逻辑设备名称
7.新建驱动程序的连接。右击“TCP/IP”,选择“新建驱动程序的连接”,名称自己定义,点击右侧的
“属性”,在弹出的连接参数里面,设置IP地址,机架号和槽号。IP地址和plc里面建立的网络一致,即192.168.0.200,机架号为0,槽号为2.如图13所示。
图13 连接参数设置
8.测试通讯。这时候通讯的通道已经建立起来了,可以测试。打开“Channel Diagnosis”,如图14。
将plc改为在线模式,plcsim选择“Run”,激活wincc。这时候,“Channel Diagnosis”的显示如图15所示。自己建立的连接,前面是绿色的对号,说明plc已经和wincc建立起了通讯。
图14 测试通讯
图15 通讯测试成功
第二步:step7编程
1.建立简单的电机启停梯形图,如图16所示。然后下载到plcsim。
图16 电机启停
2.在wincc中添加变量。需要添加三个变量,其中一个运行指示灯,一个开始按钮,一个停止按
钮。右击“TCP/IP”,选择“新建变量”,如图17所示。新建第一个变量,名称为“启动”,数据类型为“二进制变量”,点击“地址选择”按钮,“数据”选择选择“输入”,“地址”选择“位”,I0.0.如图18所示。再添加“停止”和“指示灯”变量。“停止”为I0.1,“指示灯”为Q0.0.
图17 新建变量
图18 变量属性更改和新建的变量
3.组态wincc画面。右击“图形编辑器”,选择“新建画面”,系统默认的名称为NewPdl0.Pdl,如图
19所示。可以更改名称。双击,打开,进入。
图19 新建画面
4.在打开的图形编辑器中,要选择一个圆,和两个按钮。利用圆颜色的变化,指示电机是运行还是
停止。按钮一个启动,一个停止。圆的添加。单击“标准对象”下的圆,然后按住鼠标左键,拖动到中央的编辑区,左键在适合的位置点击,圆就放好了。如图20所示。按钮在下面的“智能对象”里面,添加的方法和圆类似,添加时就可以加上名称。
图20 圆的放置
5.在添加完控件后,可以更改控件的一些属性,比如文字的字体,格式,大小,是否加粗等,控件
大小也可以拖动修改,将控件按照自己设想摆放好,如图21所示。
图21 控件
6.现在,需要修改三个控件的属性了。
首先是圆,我们需要在电机运行时,圆的颜色为绿色,停止运行时,就是默认的灰色。双击上图中的圆,弹出“对象属性”对话框,里面有两个根目录,“属性”和“事件”。“属性”是针对控件自身的一些更改,“事件”一般是执行操作时需要连接的动作等。选择“效果”下面的“全局颜色方案”,双击,将默认的“是”,即可更改为“否”。选择“颜色”下面的“背景颜色”,右击动态下面的灯泡,选择“动态对话框”,弹出“动态值范围”对话框,单击“表达式/公式”右侧的按钮,在弹出的选择中选择“变量”,进入“变量-项目”对话框。在右侧的数据源中,选项都勾选上,在左下侧的框中,选择自己添加的变量“指示灯”,确定。将“动态值范围”对话框中,数据类型改为“布尔型”,“有效范围”中,“是/真”的背景颜色改为绿色。点击“变量”右侧的按钮,进入“改变触发器”对话框,“事件”选择为“变量”,“变量名”选择“指示灯”,双击“标准周期”下的默认值“2秒”,在弹出的对话框中选择“有变化时”,点击“应用”和“确定”。再点击“应用”,完成对圆的编辑。
然后是“启动按钮”和“停止按钮”的编辑。启动按钮的状态(常开触点),不按时状态为‘0’,按下去(鼠标左键单击)变成‘1’,松开又恢复为‘0’。停止按钮的状态(常闭触点),不按时状态为‘1’,按下去(鼠标左键单击)变成‘0’,松开又恢复为‘1’。但是wincc的“常数”,和plc的按钮状态有所不同,它只关注到底是‘0’还是‘1’,不管是什么触点。对于常开触点,wincc和step7一致,但是对于常闭触点,按下的时候,要给变量‘1’,常闭触点才会断开,也就是说这里的“常数”是wincc给变量的值,不要考虑plc。在鼠标左键释放后,wincc给变量‘0’,常闭触点这时候是导通的。
双击“启动按钮”,在“事件”中选择“鼠标”,单击“按左键”,右击“动作”的闪电图标,选择“直接连接”,弹出直接连接的对话框。在“常数”对话框中,写入‘1’,这是鼠标左键点击后的状态。选择右侧的“变量”,点击右侧按钮,连接之前建立的变量“启动”,确定。然后按照同样的方式,选择“释放左键”,选择“直接连接”,里面需要更改的参数和“按左键”类似,只不过将“常数”改为‘0’即可。
双击“停止按钮”,设置方式和“启动按钮”一模一样。
7.点击“文件”菜单下的“全部保存”,即可关闭图形编辑器。
第三步:调试
1.将plc和plcsim状态改为在线和run,激活wincc。第一次激活wincc,会提示没有画面,点击“确
定”后,选择自己新建的画面为启动画面即可。或者在激活前,在wincc主页面里,右击自己建立的画面,在弹出的对话框中选择“定义画面为启动画面”。图22,调试启动。
图22 调试启动
2.打开plc的程序段,打开监控。鼠标左键点击“启动按钮”,指示灯颜色由灰色变为绿色,plc程
序梯形图输出点得电,如图23。按下“停止按钮”后松开,指示灯变回灰色,plc输出点失电,如图24。
图23 电机启动画面
图24 电机停止画面
基于组态王的机械手设计报告
电气及自动化课程设计报告题目:基于组态王的机械手设计 课程:《工控组态软件应用技术》 学生姓名: 学生学号: 年级: 14级 专业:自动化 班级: 2班 指导教师: 机械与电气工程学院制 2017年5月
基于组态王的机械手设计 机械与电气工程学院自动化 1课程设计的任务与要求 1.1 课程设计的任务 ①熟悉组态王软件,达到熟悉使用组态软件的常用工具; ②学会完成组态王工程的步骤; ③锻炼动手能力和分析问题解决问题的能力。 1.2 课程设计的要求 完成一个机械手的监控系统,具有流程图图画面,个画面能实现灵活转换 2机械手设计步骤 2.1启动组态王建立新工程 打开组态王软件,计入工程管理器,新建一个工程,选择它的储存路径并设定项目名为“机械手设计”。 2.2新建设备并将其命名为PLC 进入工程浏览器后,首先进行设备的链接,上位机COM1与PLC之间通过PC\PPI 编程电缆链接,选择工程浏览器左侧大纲“设备\COM1”,在工程浏览器右侧用鼠标双击“新建”图标,运行“设备配置向导”,相关配置如下图: 图1设备配置图
2.3通讯设备参数的设定 在组态王工程浏览器的工程目录显示区,点击“设备COM1”,进行COM1参数设置,是系统的COM1口设置与PLC一致[1]。 图2 COM1口的设置图 2.4 定义变量 数据库是”组态王”软件的核心部分,在工程管理器中,选择”数据库\数据词典”,双击”新建图标”,弹出”变量属性”对话框,创建机械手各个变量数据,数据变量是构成实时数据库的基本单元,建立实时数据库的过程也即定义数据变量的过程。定义数据变量的内容主要包括:指定数据变量名称、类型、初始值和数值范围,确定与数据变量存盘相关的参数,如存盘的周期、存盘的时间范围和保存期限等。数据对象有I/O开关型、I/O数值型、I/O字符型、内存开关型等8种类型。不同类型的数据对象,属性不同,用途也不同[3]。 设计中的数据变量:时间(内存整数)、垂直移动(内存整数)、水平移动(内存整数)、夹紧(内存离散)、启动(内存离散)。
电器逻辑控制技术——电机启停控制
电气逻辑控制技术——电机启停控制 周璟瑜
目录 设计目的 (2) 设计指标与要求 (2) 设计报告 (2) 1、关于本设计的基本功能介绍 (2) 2、设计任务分析 (2) 3、模块设计 (3) a. 输入模块的设计 (5) c. 处理环节的设计 (6) d. 输出模块的设计 (7) 4、总体设计及调试 (9) 设计总结 (10) 参考书目 (11) 附件 (12) 设计目的 1. 通过本次设计,加深对PLC软硬件的设计与编程,并对继电器,接触器;梯形图,指令
表等有一个更加全面的了解。 2. 要求在掌握MicroWIN软件的基础上,通过查阅资料,能够独立进行梯形图的设计与编程。设计指标与要求 “电气逻辑控制技术”大作业设计题目:自拟 功能指标要求: 1)根据PLC担负的任务,明确PLC的输入输出信号的种类和数量,编制输入输出信号表;2)制定控制结构框图,选择控制方案; 3)按选定的方案,制定相应的图表; 4)编写PLC梯形图程序(熟悉PLC语句程序); 5)程序调试运行; 6)编制程序使用说明书和其他文件; 设计报告 1、关于本设计的基本功能介绍 本次设计涉及到了时间继电器、互锁、顺序控制器、调用子程序等多个任务命令,实现了两台电机顺序正转3秒,然后停止3秒,其次反转3秒,最终返回初始状态,等待下一次执行命令。 2、设计任务分析 先根据当前当前制定的工艺要求来绘制出当前的电路图纸,其次根据电路图纸列出当前的IO符号表,最后根据要求进行软件程序设计。 3、模块设计 如下图所示,是本次设计的PLC管脚的输入和输出部份,分别是输入部分是I0.0急停按钮功能、I0.1是启动按钮功能、I0.2是停止按钮功能、I0.3是电机一号故障报警输入、I0.4是电机二号故障报警输入;输出部分是Q0.0是一号电机正转、Q0.1是一号电机反转、Q0.2电二号电机正转、Q0.3电二号电机反转。
电动机正反转实验报告
实验一三相异步电动机的正反转控制线路 一、实验目的 1、掌握三相异步电动机正反转的原理和方法。 2、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制线路的不同接法。 二、实验设备 三相鼠笼异步电动机、继电接触控制挂箱等 三、实验方法 1、接触器联锁正反转控制线路 (1) 按下“关”按钮切断交流电源,按下图接线。经指导老师检查无误后,按下“开”按钮通电操作。 (2) 合上电源开关Q1,接通220V三相交流电源。 (3) 按下SB1,观察并记录电动机M的转向、接触器自锁和联锁触点的吸断情况。 (4) 按下SB3,观察并记录M运转状态、接触器各触点的吸断情况。 (5) 再按下SB2,观察并记录M的转向、接触器自锁和联锁触点的吸断情况。 Q1 23 220V
图1 接触器联锁正反转控制线路 3、按钮联锁正反转控制线路 (1)按下“关”按钮切断交流电源。按图2接线。经检查无误后,按下“开”按钮通电操作。 (2) 合上电源开关Q 1,接通220V 三相交流电源。 (3) 按下SB 1,观察并记录电动机M 的转向、各触点的吸断情况。 (4) 按下SB 3,观察并记录电动机M 的转向、各触点的吸断情况。 (5) 按下SB 2,观察并记录电动机M 的转向、各触点的吸断情况。 Q 1 220V
图2 按钮联锁正反转控制线路 四、分析题 1、接触器和按钮的联锁触点在继电接触控制中起到什么作用? 实验二交流电机变频调速控制系统 一﹑实验目的 1.掌握交流变频调速系统的组成及基本原理; 2.掌握变频器常用控制参数的设定方法; 3. 掌握由变频器控制交流电机多段速度及正反向运转的方法。 二﹑实验设备 1.变频器;2. 交流电机。 三、实验方法 (一)注意事项 参考变频器的端子接线图,完成变频器和交流电机的接线。主要使用端子为R﹑S ﹑T;U﹑V﹑W;PLC﹑FWD﹑REV﹑BX﹑RST﹑X1﹑X2﹑X3﹑X4﹑CM。 变频器电源输入端R﹑S﹑T和电源输出端U﹑V﹑W均AC380V高电压﹑大电流信号,任何操作都必须在关掉总电源以后才能进行。
基于PLC和组态王的机械手控制系统设计
龙源期刊网 https://www.360docs.net/doc/ad11574496.html, 基于PLC和组态王的机械手控制系统设计作者:刘次乐李小斌吴宏岐刘霞 来源:《数字技术与应用》2018年第05期 摘要:在我国机械手的发展越来越受到社会的关注,机械手取代人力的趋势日渐明显,机械手控制系统的研究和教学被许多高校关注,然而受实验室设备和场地的限制,在校大学生很难获得更多的实验机会。因此,这里给出一种基于组态王和PLC的机械手控制系统设计方案,可有效解决实验条件不足的问题,帮助在校学生更好地理解学习机械手控制过程。实践表明,该方案可以取得很好的研究、学习效果。 关键词:机械手;PLC;组态王 中图分类号:TP29 文献标识码:A 文章编号:1007-9416(2018)05-0020-03 随着科技的发展和生产加工的高效、高精度需求,机器人的应用已经越来越受到国内生产企业的重视,在南方很多企业已经开始将机器人应用于工业生产,这也进一步推动了高等院校对机器人控制系统的研究和教学,目前在校大学生对机器人控制系统的学习兴趣也是空前高涨。然而,与之相对的是实验设备的紧缺和实验场地的严重不足。这里给出一种机械手虚拟控制系统设计方法,可借助计算机软件逼真地模拟机械手的控制过程,使学生和老师不要机械手就可以实现机械手控制系统的设计和工作过程研究。该方案只需要计算机和PLC,或者只有计算机,即可达到真实系统的仿真效果。 1 机械手主要结构及工作过程 1.1 机械手主要结构 如图1所示,机械手主要由A、B、C三个气缸组成,A气缸控制水平方向移动,B气缸 控制垂直方向的移动,C气缸完成机械手夹紧、松开动作,三个气缸在程序控制下完成机械手对物料的搬运[1]。 1.2 机械手工作过程 当机械手处于原始位置,它的左上位开关处于闭合的状态,当用户按下启动开按钮时,机械手将开始向下运动,碰到下限位开关时,停止2秒后执行夹紧动作,夹起A点物体,随后机械手开始向上移动,碰到上限位开关时开始向右移动,碰到右限位开关就向下运动,直到遇到下限位开关,执行松开动作将物品放到b点。之后,机械手回到原位,这个流程即完成了一次物料的搬运的过程,整个工作过程如图2所示。 2 机械手控制系统设计
实验一 三相异步电动机启停控制实验
实验一三相异步电动机启停控制实验 一、实验目的: 1.进一步学习和掌握接触器以及其它控制元器件的结构、工作原理和使用方法; 2.通过三相异步电动机的启、停控制电路的实验,进一步学习和掌握接触器控制电路的结构、工作原理。 二、实验内容及步骤: 图1-1为三相异步电动机的基本启停电路。电路的基本工作原理是:首先合上电源开关QF5 ,再按下“启动”按钮,KM5得电并自锁,主触头闭合,电动机得电运行。按下“停止”按钮,KM5失电,主触头断开,电动机失电停止。 实验步骤: 1.按图1-1完成控制电路的接线; 2.经老师检查认可后才可进行下面操作! 3.合上断路器QF5,观察电动机和接触器的工作状态; 4.按下操作控制面板上“启动”按钮,观察接触器和电动机的工作状态; 5.按下操作控制面板上“停止”按钮,观察接触器和电动机的工作状态。 6.当未合上断路器QF5时,进行4和5步操作,观察结果。 图 1-1 三相异步电动机基本启停控制 三.实验说明及注意事项 1.本实验中,主电路电压为380VAC,请注意安全。 四.实验用仪器工具 三相异步电动机 1台 断路器(QF5) 1个 接触器(KM5) 1个 按钮 2个 实验导线若干 五.实验前的准备 预习实验报告,复习教材的相关章节。 六.实验报告要求 1.记录实验中所用异步电动机的名牌数据; 2.弄清QF5型号和功能; 3.比较实验结果和电路工作原理的一致性;
4.说明6步的实验结果并分析原因。 七.思考题 1.控制回路的控制电压是多少? 2.接触器是交流接触器,还是直流接触器?接触器的工作电压是多少 3.如果将A点的连线改接在B点,电路是否能正常工作?为什么? 4.控制电路是怎样实现短路保护和过载保护的? 5.电动机为什么采用直接启动方法? 实验二三相异步电动机正反转控制实验 一、实验目的: 1.学习和掌握PLC的实际操作和使用方法; 2.学习和掌握利用PLC控制三相异步电动机正反转的方法。 二、实验内容及步骤: 本实验采用PLC对三相异步电动机进行正反转控制,其主电路和控制电路接线图分别为图2-1和图2-2 。图中:正向按钮接PLC的输入口X0,反向按钮接PLC的输入口X1,停止按钮接PLC 的输入口X2,KM5为正向接触器,KM6反向接触器。继电器KA5、KA6分别接于PLC的输出口Y33、Y34。 其基本工作原理为:合上QF1、QF5, PLC运行。当按下正向按钮,控制程序使Y33有效,继电器KA5线圈得电,其常开触点闭合,接触器KM5的线圈得电,主触头闭合,电动机正转;当按下反向按钮,控制程序使Y34有效,继电器KA6线圈得电,其常开触点闭合,接触器KM6的线圈得电,主触头闭合,电动机反转。 实验步骤: 1.在断电的情况下,学生按图2-1和图2-2接线(为安全起见,控制电路 的PLC外围继电器KA5、KA6以及接触器KM5、KM6输出线路已接好); 2.在老师检查合格后,接通断路器QF1、QF5 ; 3.运行PC机上的工具软件FX-WIN,输入PLC梯形图; 4.对梯形图进行编辑﹑指令代码转换等操作并将程序传至PLC; 5.运行PLC,操作控制面板上的相应开关及按钮,实现电动机的正反转控 制。在PC机上对运行状况进行监控,同时观察继电器KA5、KA6和接触器KM5 、KM6的动作及变化情况,调试并修改程序直至正确; 6.记录运行结果。
实验一 电动机正反转实验
实验一电动机正反转实验 一、实验目的 1、通过练习实现与、或、非逻辑功能,熟悉PLC编程方法。 2、熟悉ZY17PLC12BC实验箱的使用方法。 二、实验器材 1、ZY17PLC12BC型可编程控制器实验箱 1台 2、PC机或FX-20P-E编程器 1台 3、编程电缆 1根 4、连接导线若干 三、实验原理 (1)LD、LDI指令用于将触点接到母线上。另外,与后述的ANB指令组合,在分支起点处也可使用。 (2)OUT指令是对输出继电器、辅助继电器、状态继电器、定时器,计数器的线圈的驱动指令、对于输入继电器不能使用。 (3)并行输出指令可多次使用。 2、触点串联(AND/ANI) 说明: (1)用AND、ANI、指令,可进行触点的串联连接。串联触点的个数没有限制,该指令可以多次重复使用。 (2)OUT指令后,通过触点对其他线圈使用OUT指令称之为纵接输出。这种纵接输出,如果顺序不错,可以多次重复,
3、触点并联(OR/ORI) (1)OR、ORI用作为1个触点的并联连接指令。如果连接2个以上的触点串联连接的电路块的并联连接时,要用后述的ORB指令。 (2)OR、ORI指令是从该指令的当前步开始对前面的LD、LDI指令并联连接。并联连接的次数无限制,但由于编程器和打印机的功能对此有限制,所以并联连接的次数实际上是有限制的。 (1)两个以上的触点串联连接的电路称之为串联电路块。串联电路块并联连接时,分支的开始用LD、LDI指令,分支的结束用ORB指令。 (2)ORB指令与后述的ANB等均为无操作元件号的指令。 (1)分支电路并联电路块与前面电路串联连接时,使用ANB指令。分支的起点用LD、LDI指令。并联电路块结束后,使用ANB指令与前面电路串联。 (2)若多个并联电路块顺次用ANB指令与前面电路串联连接,则ANB的使用次数没有限制, (3)虽然可以连续使用ANB指令,但这时与ORB指令同样要注意LD、LDI指令的使用次数限制(8次以下)。 6、程序结束(END) 7、控制要求 本实验利用PLC控制电机正反转。发光二极管KM1亮模拟电机正转,发光二极管KM2
WinCC组态控制电机启停详细操作步骤和截图
W i n C C组态控制电机启停详细操作步骤和截 图 集团标准化工作小组 [Q8QX9QT-X8QQB8Q8-NQ8QJ8-M8QMN]
实验二 WinCC控制电机启停 在上位机WinCC组态画面中控制电机的单向启停 步骤 一、编写PLC程序 1.按照实验一中的步骤创建新项目、进行硬件组态,保存并下载 2.参考试验一中的步骤编辑符号表并保存,如下图所示 3.参考试验一中的步骤在OB1编写程序,保存并下载到PLC,如下图所示 二、创建WinCC监控 1.打开WinCC 2.创建新项目
3. 添加驱动程序,创建连接 注意:上图中“服务器列表”中列出的是操作者使用的计算机名,应为系统自动生成,可能与图中的“AUTOMATION”不同,一般不需要修改 注意:本例中“插槽号”为2,代表CPU的位置 4. 在新建连接中创建变量
再按照同样方法创建“停止1”和“运行输出”变量,注意修改地址。“运行地址”变量的“数据”选项应选择“输出” 5. 创建监控画面 打开图形编辑器 创建按钮
双击按钮打开“对象属性”对话框,在“事件”选项卡中选择“鼠标”,在“按左键”后的图标上单击右键,选择“直接连接” 入下图所示设置参数,单击下图所示位置选择变量,然后单击“确定” 同样在“释放左键”后的图标上单击右键,选择“直接连接”,并如下图设置参数 用“启动”按钮同样方法创建并设置“停止”按钮,不同的是“按左键”和“释放左键”的目标变量选择“停止1”
添加一个圆作为指示灯 双击港添加的圆形组件打开设置窗口,在“属性”选项卡中选择“颜色”,在“背景颜色”后的灯泡图标上单击右键,选择“动态对话框” 在弹出对话框中选择“布尔型”,单击“表达式/公式”栏后面的“...”按钮,在弹出窗口中选择“运行输出”变量,确定后回到当前窗口,双击“背景颜色”标题下的色块来改变颜色,单击“触发器”图标,在弹出窗口中双击“2秒”并改为“根据变化”,确定后单击“应用” 单击“运行系统”图标进行操作和监视
PLC控制实验--变频器控制电机正反转
实验二十八变频器控制电机正反转 一、实验目的 了解变频器外部控制端子的功能,掌握外部运行模式下变频器的操作方法。二、实验设备 序号名称型号与规格数量备注 1 网络型可编程控制器高级实验装置THORM-D 1 2 实验挂箱CM51 1 3 电机WDJ26 1 4 实验导线3号/4号若干 5 通讯电缆USB 1 6 计算机 1 自备 三、控制要求 1.正确设置变频器输出的额定频率、额定电压、额定电流。 2.通过外部端子控制电机启动/停止、正转/反转。 3.运用操作面板改变电机启动的点动运行频率和加减速时间。 四、参数功能表及接线图 1.参数功能表 序号变频器参数出厂值设定值功能说明 1 n1.00 50.00 50.00 最高频率 2 n1.05 1.5 0.01 最低输出频率 3 n1.09 10.0 10.0 加速时间 4 n1.10 10.0 10.0 减速时间 5 n2.00 1 1 操作器频率指令旋钮有效 6 n2.01 0 1 控制回路端子(2线式或3线式) 7 n4.04 0 1 2线式(运转/停止(S1)、正转/反转(S2)) 注:(1)设置参数前先将变频器参数复位为工厂的缺省设定值(2)设定n0.02=0可设定及参照全部参数 2.变频器外部接线图 五、操作步骤
1.检查实验设备中器材是否齐全。 2.按照变频器外部接线图完成变频器的接线,认真检查,确保正确无误。 3.打开电源开关,按照参数功能表正确设置变频器参数。 4.打开开关“K1”,观察并记录电机的运转情况。 5.旋转操作面板频率设定旋钮,增加变频器输出频率。 6.关闭开关“K1”,变频器停止运行。 7.打开开关“K1”、“K2”,观察并记录电机的运转情况。 六、实验总结 1.总结使用变频器外部端子控制电机正反转的操作方法。 2.总结变频器外部端子的不同功能及使用方法。
基于组态王的机械手监控系统设计
基于组态王kingview6.53的机械手监控系统设计 摘要: 主要介绍了基于组态王Kingview6.53实现对机械手控制系统的动画设计,开发上位机监控界面。组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求和操作人员的指令使机械手按照设定的轨迹运行,并且将现场数据以报表的形式在监控界面中显示出来。该系统可以很好的实现机械手的自动控制和管理。 关键词:机械手;S7-200 PLC;组态王 0 引言 在工业生产中,人们经常受到高温、腐蚀及各种辐射等因素的危害,增加了操作人员的劳动强度,甚至于危及生命。机械手的问世,相应的各种难题迎刃而解。本机械手控制系统采用THFJX-1型机械手实物教学模型。用西门子S7-200 PLC 控制。 上位机监控系统采用组态王kingview6.53组态软件设计,组态王6.53是由亚控科技有限公司研制的组态软件,是运行于Microsoft Windows2000\XP 中文平台的中文界面的人机界面软件,为用户提供了解决实际工程问题的完整方案和开发平台,能够完成现场数据采集、实时和历史数据处理、报警和安全机制、流程控制、动画显示、曲线和报表输出、企业监控网络系统等功能。通过对本监控系统的分析,主要实现了以下两个功能,一、充分利用了组态王的图形编辑功能,方便地构成监控画面,并以动画方式显示机械手的运行的状态二、生成实时报表和历史报表并保存到指定的文件夹下,还可以对指定的变量进行查询。 1 机械手的控制系统工作原理 THFJX-1型机械手实物教学模型,其主体由底板、实验桌(型材结构)、旋转底盘、气动部分、手爪、三维(X、Y、Z)运动机械及电气控制等四部分组成。气动部分由电磁阀和汽缸组成;三维运动机械部分是一个采用滚珠丝杠传动和齿轮传动相结合的模块化结构,用于实现定位功能。 电气控制是由西门子S7-200小型PLC、步进电机驱动电源模块、开关电源、光电传感器等器件组成。通过传感器信号采集,PLC编程,对步进电机、直流电机、电磁阀进行较复杂的开关量控制、位置控制、时序逻辑控制,实现对机械手在工作台面范围内物体抓取、移、放的功能。 具体的控制要求是: (1)按下上电按钮后,机械手得电进入工作状态。 (2)按下复位按钮后,复位指示灯闪烁,不管机械手在什么位置,都将回到原始位置。 (3)按下启动按钮后,启动灯闪烁,当按下运行按钮时,机械手臂伸出→下移→抓紧→上升→手臂收入→左摆→伸出→下移→放开→上移→手臂收入→右摆,进行一次循环运行,最后回到原始位置,等待下一次运行启动。
组态王课程设计报告
《组态王课程设计报告》题目:反应器液位的检测与监控 姓名:张正强 学号:201211214 专业:自动化 班级:112班 指导教师:王继东 2015年6月22日
目录 一、组态王软件介绍 (3) 二、设计要求 (4) 三、实验目的 (4) 1.熟悉组态王软件,达到熟练使用组态软件的常用工具 (4) 2.学会完成组态工程的设计步骤 (4) 3.锻炼动手能力和分析问题解决问题的能力 (4) 四、实验步骤: (4) 1、系统设计: (4) A.启动浏览器,新建工程 (4) B.设备定义 (4) C.变量定义 (5) D.画面绘制 (6) E.动画连接及按键的程序编写 (7) 五、结束语 (13) 六、参考文献 (13)
一、组态王软件介绍 组态王开发监控系统软件,是新型的工业自动控制系统,它以标准的工业计算机软、硬件平台构成的集成系统取代传统的封闭式系统。它具有适应性强、开放性好、易于扩展、经济、开发周期短等优点。通常可以把这样的系统划分为控制层、监控层、管理层三个层次结构。其中监控层对下连接控制层,对上连接管理层,它不但实现对现场的实时监测与控制,且在自动控制系统中完成上传下达、组态开发的重要作用。尤其考虑三方面问题:画面、数据、动画。通过对监控系统要求及实现功能的分析,采用组态王对监控系统进行设计。组态软件也为试验者提供了可视化监控画面,有利于试验者实时现场监控。而且,它能充分利用Windows的图形编辑功能,方便地构成监控画面,并以动画方式显示控制设备的状态,具有报警窗口、实时趋势曲线等,可便利的生成各种报表。它还具有丰富的设备驱动程序和灵活的组态方式、数据链接功能。 图一组态王软件
电气控制电动机先后启停控制系统
目录 一控制要求 .................... (1) 二控制系统设计 (1) 1 基本设计思路 (1) 2 主电路设计 (2) 3 PLC 控制系统设计 (2) 3.1、I/O点数确定及PLC外部接线 (2) 3.2 、梯形图的设计与分析 (3) 3.3 、指令语言的编写 (5) 三柜内外安装布置图设计 (5) 1 元器件的选择 (5) 2 柜内外安装布置图 (6) 四安装接线图的设计 (6) 五电动机先后启停控制系统使用说明书 (6) 1 主要技术指标 (7) 2 使用方法 (7) 附录一元件明细表附录二图纸目录表
、控制要求 通过对电气控制系统的设计,掌握电气控制系统设计的一般方法,能够设计出满足控制要求的电气原理图,以及安装布置图、接线图和控制箱的设计,具有电气控制系统工程设计的初步能力。其具体控制要求为: 设计一个电气控制系统。该系统由两台三相鼠笼电动机拖动,其控制要求如下: 1. M1的功率5.5KW可以直接起动,停车时采用反接制动。 2. M1起动20s后,M2直接起动,功率4KW 3. M2停车后10s, M1自动停车。 4. 起动、停车都要求两地控制。 5. 设置必要的电气保护。 二、控制系统设计 1、基本设计思路 根据控制要求(1),系统电路共有主电路、信号电路和控制电路等三部分组成。根据M1 的起停控制要求,采取直接起动,它是三相异步电动机应用最多的一种起动方式,也是起停方式中最简单、最直接的一种。对于小功率电机这种应用方式占有绝对优势。停车时利用速度继电器采取反接制动,将KV的常开触点作为PLC 的输入,接通反接电源电路,此种方法有制动力大,制动迅速的优点。起动后信号指示灯HL1亮,故障时HL3指示灯亮。 根据控制要求(2),M2采取直接启动,利用PLC中定时器TIM00指令达到延时作用。将TIM00的常开触点串入M2的起动回路中,延时20秒动作后M2 起动。起动后HL2指示灯亮,故障时HL4指示灯亮。 根据控制要求(3),利用按钮断开M2电动机的回路,并令TIM01此时开始定时,将TIM01 的常闭触点串入M1 的起动电路中,延时时间为10s,TIM01 动作后即可断开M1。
电机正反转实验
电机正反转实验 一.实验目的 1.了解机床电气中三相电机的正反转控制和星三角启动控制。 2.掌握电动机的常规控制电路设计。 3.了解电动机电路的实际接线。 4.掌握GE FANUC 3I系统的电动机启动程序编写。 二.实验原理和电路 交流电动机有正转启动和反转启动,而且正反转可以切换,启动时,要求电动机先接成星型连接,过几秒钟再变成三角形连接运行。PLC控制电动机的I/O 地址如下表所示: PLC模拟控制电动机I/O地址表 输入输出 器件(触摸屏M)说明器件说明I1(M21)正转Q2 正转 I2(M22)反转Q3 星形 I3(M23)停止Q4 三角形 Q5 反转 电动机星三角启动电气接口图:
模块的现场接线 接线前请熟悉接线图,我们在这里简单介绍下输入输出模块的接线方法,在接下来的实验中不再赘述。详细请见第一章的模块介绍。 ●输入模块现场接线 IC694MDL645,数字量输入模块,提供一组共用一个公共端的16个输入点,如图所示。该模块即可以接成共阴回路又可以接成共阳回路,这样在硬件接线时就非常灵巧方便。但在本系统中,我们统一规定本模块接成共阳回路,即1号端子由系统提供负电源,外部输入共阳。 IC694MDL645数字量输入模块现场接线 ●输出模块现场接线 IC694MDL754,数字输出模块,提供两组(每组16个)共32个输出点。每组
有一个共用的电源输出端。这种输出模块具有正逻辑特性;它向负载提供的源电流来自用户共用端或者到正电源总线。输出装置连接在负电源总线和输出点之间。这种模块的输出特性兼容很广的负载,例如:电动机、接触器、继电器,BCD 显示和指示灯。用户必须提供现场操作装置的电源。每个输出端用标有序号的发光二极管显示其工作状态(ON/OFF)。这个模块上没有熔断器。接线必须注意。 即:17端接正电源,18端接负电源及外部负载的共阴端。 IC694MDL754数字量输出模块现场接线 三:实验步骤: 1.编写PLC程序,可参照参考程序,并检查,保证其正确。 2.按照电器接口图接线。 3.下载程序。 4.置PLC于运行状态,按下启动键,观察电机运行。 5.实验结束后,关电源,整理实验器材。 四:实验器材 1.GE FANUC 3I系统一套 2.PYS3电机正反转模块一块 3.网线一根 4.KNT连接导线若干
基于PLC与组态王的机械手控制系统设计1
毕业论文 标题:基于PLC与组态技术机械手的控制系统学生姓名:陈勇乐谭鑫 系部:电子信息系 专业:电气自动化技术 班级:高电气1102班 指导教师:罗麦丰老师 湖南汽车工程职业学院教务处制
摘要 (1) 引言 (2) 一、机械手控制系统的工作要求 (4) 二、下位机PLC控制系统设计 (5) 2.1机械手控制PLC 输入输出端子分配 (5) 2.2机械手控制PLC顺序功能图 (5) 2.3机械手控制PLC外围接线图 (6) 2.4机械手控制PLC梯形图 (7) 三、系统上位机组态设计及功能实现 (10) 3.1设备连接 (10) 3.2通讯设备参数设置 (10) 3.3构造数据库 (11) 3.4监控界面的设计和动画连接 (12) 3.5系统运行 (14) 四、系统调试 (16) 4.1使用设备 (16) 4.2调试过程 (16) 五、设计过程遇到的问题及解决方法 (17) 总结 (19) 参考文献 (20) 致谢 (21) 附录1 .................................. 错误!未定义书签。附录2 .................................. 错误!未定义书签。
本设计主要介绍了基于组态王与PLC实现对机械手控制系统设计,开发PLC控制系统与上位机监控界面。组态王通过设备驱动程序从现场硬件设备获取实时数据并处理,以动画的方式在上位机屏幕上显示,同时按照组态要求和操作人员的指令使机械手按照设定的轨迹运行,并且将现场动画在监控界面中显示出来。该系统可以很好的实现机械手的自动控制和管理。 关键词:机械手; S7-200 PLC;组态王
PLC课程设计(电动机正反转控制系统)
摘要 可编程控制器(PLC)是以微处理器为核心,将自动控制技术、计算机技术和通信技术融为一体而发展起来的崭新的工业自动控制装置。目前PLC已基本替代了传统的继电器控制而广泛应用于工业控制的各个领域,PLC已跃居工业自动化三大支柱的首位。 生产机械往往要求运动部件可以实现正反两个方向的起动,这就要求拖动电动机能作正、反向旋转。由电机原理可知,改变电动机三相电源的相序,就能改变电动机的转向。
目录 第一章PLC概述 (1) 1.1 PLC的产生 (1) 1.2 PLC的定义 (1) 1.3 PLC的特点及应用 (2) 1.4 PLC的基本结构 (5) 第二章控制系统设计 (7) 2.1 设计思路 (7) 2.2 PLC的定义 (8) 2.3 PLC的特点及应用 (9) 结论 (10) 参考文献 (11)
第一章PLC概述 1.1 PLC的产生 1969年,美国数字设备公司(DEC)研制出了世界上第一台可编程序控制器,并应用于通用汽车公司的生产线上。当时叫可编程逻辑控制器PLC (Programmable Logic Controller),目的是用来取代继电器,以执行逻辑判断、计时、计数等顺序控制功能。紧接着,美国MODICON公司也开发出同名的控制器,1971年,日本从美国引进了这项新技术,很快研制成了日本第一台可编程控制器。1973年,西欧国家也研制出他们的第一台可编程控制器。 随着半导体技术,尤其是微处理器和微型计算机技术的发展,到70年代中期以后,特别是进入80年代以来,PLC已广泛地使用16位甚至32位微处理器作为中央处理器,输入输出模块和外围电路也都采用了中、大规模甚至超大规模的集成电路,使PLC在概念、设计、性能价格比以及应用方面都有了新的突破。这时的PLC已不仅仅是逻辑判断功能,还同时具有数据处理、PID调节和数据通信功能,称之为可编程序控制器(Programmable Controller)更为合适,简称为PC,但为了与个人计算机(Persona1 Computer)的简称PC相区别,一般仍将它简称为PLC (Programmable Logic Controller)。 1.2 PLC的定义 “可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用了可编程序的存储器,用来在其内部存储和执行逻辑
机械手设计论文
. . 摘要 这次的设计主要以国外机械手的研究现状以及PLC的发展趋势为着手点,重点介绍了机械手在PLC控制电路控制下的工作过程及运作原理,随后又着眼于组态王软件与机械手控制系统的结合,利用组态王开发出了用于机械手控制系统的监控界面,从而可以更加清晰准确地关注机械手的工作状况,为故障诊断、维修提供了便利,充分提高了系统的工作效率。 关键词:机械设计,机械手,PLC,组态王
Abstract In this design the present condition of research about domestic and international manipulator and development trend of research concerning PLC were introduced. The principle of work and the process of action’s realization of manipulator control system were described. The design of manipulator model control system based on PLC was researched and KingView’s application in the manipulator model control system was researched. The interface of supervision for the manipulator model control system was designed by KingView. An intuitive, clear and accurate manipulator operating state was provided. And then various possibilities for maintain and breakdown’s diagnosis were provided, the work’s efficiency of system was fully elevated. Key Words: manipulator , electromagnetic valve, PLC,KingView
软件自动控制电机启停及调速设置
金田变频器手动启动电机更改为Mach3软件自动控制 变频器启动电机及调速 金田变频器手动启动电机手动调速,不能实现自动化控制,需人工操作启动,电机工作结束,需人工操作停止。为节约人力,现将更改为电脑软件(mach3)自动控制的变频器设置、接线操作经验介绍如下(高转速电机400Hz800W为例): 敬告:在实施操作时确保人员安全为第一要务。 金田变频器面板图 主要用到以下按钮:▼下调数据, ▲上调数据,《向左移动数据闪烁位, DATA表示确定,PRGM设置、返回 此图片截自豆丁网 分步操作: 1.根据电机参数设置变频器最 高频率400Hz: 变频器参数设为P0.06=400Hz(表示变频器工作最高 频率为400Hz高转速电机使用,出厂设置为50Hz),变 频器开机后,按钮操作:按一下PRGM,显示P0,按一 P0.00,按一下DATA确定,按▲调整下DATA确定,显示 为p0.06,按一下DATA确定,显示出厂设置50,0在 闪烁,现在按一下《,5闪烁,按▲调整为100,按
《,1闪烁,按▲调整为400,调整结束按一下DATA确定,数据被保存,按PRGM返回,设置结束。 2.设置负载电机运行额定频率 变频器参数设为P0.07=400(根据电机参数设置额定频率400Hz,出厂设置为50),设置过程比照1步骤。 3.设置外部频率控制通道为外部电压信号VI 变频器参数设为P0.0 1 =5(表示频率控制通道为外部电压信号VI,出厂设置为0面板旋钮),设置过程比照1步骤。 4.设置电机运行控制为外部端子控制(usb或者并口控制卡接在电脑通过软件控制) 变频器参数设为P0.03= 1 (表示变频器电机启动为部端子控制,出厂设置为0表示面板控制),设置过程比照1步骤。 5.设置电机运行上限频率 变频器参数设为P0. 1 9=400(表示变频器电机上限频率400Hz,出厂设置为50),设置过程比照1步骤。 6.设置软件控制电机运行速度最大给定电压10V对应变频器最高频率 变频器参数设为P 1 . 0 5=400(表示电压10V对应变频器最高频率400Hz,出厂设置为50),设置过程比照1步骤。 7.并口卡及变频器接线 准备材料:0.8-1.5mm2电线25cm2条(黄色、蓝色)、
PLC控制电机正反转 教学案例
PLC控制电机正反转 类别:职教专业编号:()教材简析: 职业教育的目的就是培养应用人才和具有一定文化水平和专业知识技能的工作者,职业教育强调理论和实践训练并重,《可编程序控制器(英文缩细PLC)及其应用》(第二版)(以后简称《PLC》)教材侧重理论,学生单独学习较为吃力。而在《电力拖动》这门课程中的三相异步电动机正反转控制线路学生已非常熟悉,也是电拖这门课程的重点。将这二者联系起来学习将会收到意想不到的效果。 学情分析:中专学生比较活跃,但是理论基础较差,已具有PLC的基础知识,熟悉三相异步电动机正反转控制线路的工作原理与接线方法。 教学目标: 1、知识目标: (1)掌握继电器控制三相异步电动机正反转控制线路的工作原理 (2)熟练掌握PLC编程基本方法和编程技巧及基本指令的应用,并利用PLC 完成调试。 (3)熟练掌握分配PLC的输入点和输出点,并画出梯形图,转换成语句表,控制电动机工作。 2、能力目标 (1)通过任务驱动和引导教学培养学生分析问题和解决问题的能力。 (2)通过运用PLC完成电动机正反转控制电路的实训,培养学生动手动脑,团结协作的能力。 3、情感目标 让学生将逐步养成严谨求实,合作创新的科学态度为继续学习和发展奠定基础。
教学重点、难点: 1、重点:(1)三相异步电动机正反转控制线路的工作原理。 (2)PLC编程基本方法和编程技巧及基本指令的应用。 (3)分配PLC的输入点和输出点,并画出梯形图,转换成语句表,控制电动机工作。 2、难点:(1)PLC具体的编程方法。 (2)分配设计完成任务的控制程序“梯形图—语句表” 教学方法: 在这节课里主要采用的是任务驱动教学法和行为引导教学法进行教学,以任务为主线、教师为主导、学生为主体,整个教学围绕任务的解决而展开,教师提出引导性问题,给定任务要求;学生小组协作进行决策分析,制定出计划,并实施计划,完成任务。创设真实氛围的工作环境,将教室与实训室合二为一,开展一体化教学,形成仿真的工作场所,使教学过程变为生产过程,学习任务变为工作任务,使学生通过学习亲身体验工作,培养学生自主思考的能力。 设计理念: PLC教材偏重于理论,学生实训完继电器控制的三相异步电动机正反转控制线路之后,并且已经掌握了基本编程指令的基础上,通过理论与实践相结合掌握PLC在电动机的正反转电路中的应用。三相异步电动机的正反转可以通过继电器控制,也可以通过PLC控制,通过本节的学习,学生即回顾了继电器控制的方法,又将PLC的基本指令应用于实践当中,还为学生以后的编程提供一种有效的方法,因此学好本节内容在整个学习过程中就显得至关重要。由于学生知识水平层次差异,根据教材制定的实施性教学计划,保证每个学生课有所得,本节课我设计少讲多练,让学生在操作中懂理论,在练习中长技能。
组态王自动大门综合设计
学号:0115 郑州工程技术学院 课程设计 设计题目:组态王自动大门综合设计 学院:机电与车辆工程学院 专业:电气自动化技术 班级:16电气(普招)1班 姓名:利军 指导教师:雷钢 日期:2018 年10 月29 日
诚信声明 本论文是我个人在老师指导下,按任务书要求,自己撰写的论文。该论文凡引用他人的文章或成果之处都在论文中注明,并表示了谢意。除此之外都是自己的工作成果。若本论文及资料与以上声明不符,本人承担一切责任。
本人签名: 日期:年月日 课程设计任务书 班级:16电气普招1班学生:利军学号:0115 设计题目:组态王自动大门综合设计 摘要: 本课程电气自动化技术专业的学科专业课----组态控制技术的一个实践教学环节。 本课程的目的和任务是:熟悉常用电气设备的性能和工作原理,把学生学习过的如变频器、电力电子、组态控制技术、PLC等课程知识进行综合设计,使学生更加有效的掌握所学知识,进一步提高学生的实际动手能力和编程设计能力。 通过一周的课程设计,使学生掌握一个较为复杂的组态控制系统的设计和制作的方法;理解组态软件的设计原理; 1.巩固和加强“组态控制技术”课程的理论知识。 2.掌握组态控制技术的一般的设计方法,了解组态软件开发过程。 3.提高电组态软件使用能力。 4.掌握组态软件调试的方法及程序设计方法。 5.学会撰写课程设计总结报告。 6.通过查阅手册和文献资料,培养同学们独立分析问题和解决问题的能力。 7.培养创新能力和创新思维。 设计内容及要求: 本课程主要内容是:用一周的时间让学生独立进行组态控制系统的设计,制作和调试。本课程是在组态控制技术结束之后的一次设计实践。选题很重要。既要有综合性,有一定的难度,又要让学生能在一周内完成。以下题目可作为参考: 1.根据设计题目要求,通过查阅有关资料分析系统工作原理; 2.完成系统控制框图设计; 3.设计系统控制逻辑; 4.编写组态软件程序; 5.系统调试; 6.编写课程设计报告 设计参考题目:1.五层电梯设计;2.机械手控制设计;3.塔吊控制设计;
3台电动机自动顺序启停PLC控制
1.引言 可编程序控制器,是集计算机技术、自动化技术、通信技术于一体的通用工业控制装置,简称PLC。它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。PLC是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点的接线复杂、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场电气操作维修人员的技能与习惯,特别是PLC的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程序编制形象、直观、方便易学;调试与查错也都很方便。用户在购到所需的PLC后,只需按说明书的提示,做少量的接线和简易的用户程序编制工作,就可灵活方便地将PLC应用于生产实践。 以PLC为主构成的控制系统具有可靠性高、控制功能强大、性价比高等优点,是目前工业自动化的首选控制装置。故本设计中采用PLC集中控制的办法,利用PLC 简单可视化的程序,对3台电动机实现顺序起停控制,可以通过手动实现,也可以通过延时实现自动起停控制,延时时间可以在线设置,并通过指示灯显示各电动机的运行状态。本设计广泛应用在港口、电厂、煤矿、钢铁企业、水泥、粮食以及轻工业的生产线。既可以运送散状物料,也可以运送成件物品。还可应用于装船机、卸船机、堆取料机等连续运输移动机械。 通过本设计对所学的PLC知识综合巩固应用,巩固练习运用组态软件及组态设计,提高对PLC控制系统的设计、安装和调试能力。 2. PLC选型 世界上PLC产品可按地域分成三大流派:美国、欧洲和日本。日本的PLC技术是
机械手实验报告
中国矿业大学机电学院 机电综合实验中心实验报告 课程名称:机电综合试验 实验名称:机械手动作模拟 专业年级:机自12-10班 :张立峰学号:06122676 :张世超学号:03121200 :孙培忠学号:14125143 :殷猛学号:09123830 :葛松学号:05122177 实验日期 2015.10.31 ___ _ 实验成绩_______ ___________ 指导教师_______ __________
机械手动作的模拟 摘要 本文通过使用组态王软件进行组态模拟和运用SIMEINS S7-200PLC控制系统,采用下位机执行,上位机监视控制的方法,构建完成机械手动作模拟控制系统。 关键词:组态王6.53;plc;限位开关; ABSTRACT In this paper, by using the Kingview software configuration simulation and application of SIMEINS S7-200PLC control system, using the next-bit machine execution, PC monitor control method, build complete robot motion simulation control system. Keywords:Kingview 6.53;PLC;Limit switch;
第一章绪论 1.1实验目的 学会使用组态软件(推荐选用组态王软件)和PLC(推荐选用SIMEINS S7-200) 控制系统连接,采用下位机执行,上位机监视控制的方法,构建完成机械手动作 模拟控制系统。 1.2实验要求 (1)阅读本实验参考资料及有关图样,了解一般控制装置的设计原则、方法和步骤。 (2)调研当今电气控制领域的新技术、新产品、新动向,用于指导设计过程,使设计成果具有先进和创造性。 (3)认真阅读实验要求,分析并进行流程分析,画出流程图。 (4)应用PLC设计控制装置的控制程序。 (5)设计电气控制装置的照明、指示及报警等辅助电路。 (6)绘制正式图样,要求用计算机绘图软件绘制电气控制电路图,用STEP 7-Micro/Win32编程软件编写梯形图。 1.3 实验内容 (1)机械手处于原位时,上、下限位开关均接通,原位指示灯亮; (2)按下启动按钮,上限位开关断开,原位指示灯灭,下行指示灯亮; (3)下降到位下限位开关接通,下行指示灯灭,夹紧指示灯亮,延时后上行指示灯亮同时下限位开关断开; (4)上升到位上限位开关接通,上行指示灯灭,右行指示灯亮同时上限位开关断开; (5)右行到位右限位开关接通,右行指示灯灭,下行指示灯亮; (6)下行到位下限位开关接通,下行指示灯灭,夹紧指示灯灭,延时后上升指示灯亮; (7)上升到位上限位开关接通,上行指示灯灭,左行指示灯亮; (8)左行到位左限位开关接通,左行指示灯灭,原位指示灯亮,再次按下启动按钮,将重复以上操作。 1.4课程设计器材: (1)TKPLC-1型实验装置一台 (2)安装了STEP7-Micro/WIN32编程软件和组态软件的计算机一台。 (3)PC/PPI编程电缆一根。 (4)连接导线若干。 1.5 PLC的介绍 可编程逻辑控制器(Programmable Logic Controller,PLC),它采用一类可编 程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算