仿生鱼鳍中形状记忆合金驱动器的水下变形精度分析
万方数据
第29卷第4期章永华等:仿生鱼鳍中形状记忆合金驱动器的水下变形精度分析321
式形状记忆合金弹簧驱动的机器鱼尾鳍关节[引.但是,目前尚未见到有关利用形状记忆合金作为驱动源来实现仿生鱼鳍的柔性波动运动的报道.
本文的工作是在先前所设计的形状记忆合金薄板驱动的仿生鱼鳍推进器的基础上,重点讨论单对形状记忆合金薄板的水下弯曲变形精度问题.由于受到流体阻力和偏置SMA薄板回复力的作用,形状记忆合金薄板的水下变形位置和理论期望值存在着差异.因此,分析这种差异的大小以及影响这种差异大小的各种因素,在控制中进行补偿,以提高单对形状记忆合金薄板的水下变形精度.同时将理论计算、数值仿真和实验测试相结合,给出了形状记忆合金薄板表面的流体无量纲阻力系数随时间的变化关系;给出了某一时刻(£=53.5S)薄板表面及其周边的压力分布;计算了该时刻薄板端部的变形误差;最后通过实验证明了理论和仿真结果的可靠性.
2仿生鱼鳍回顾(Renewofbiomimeticfishfin)
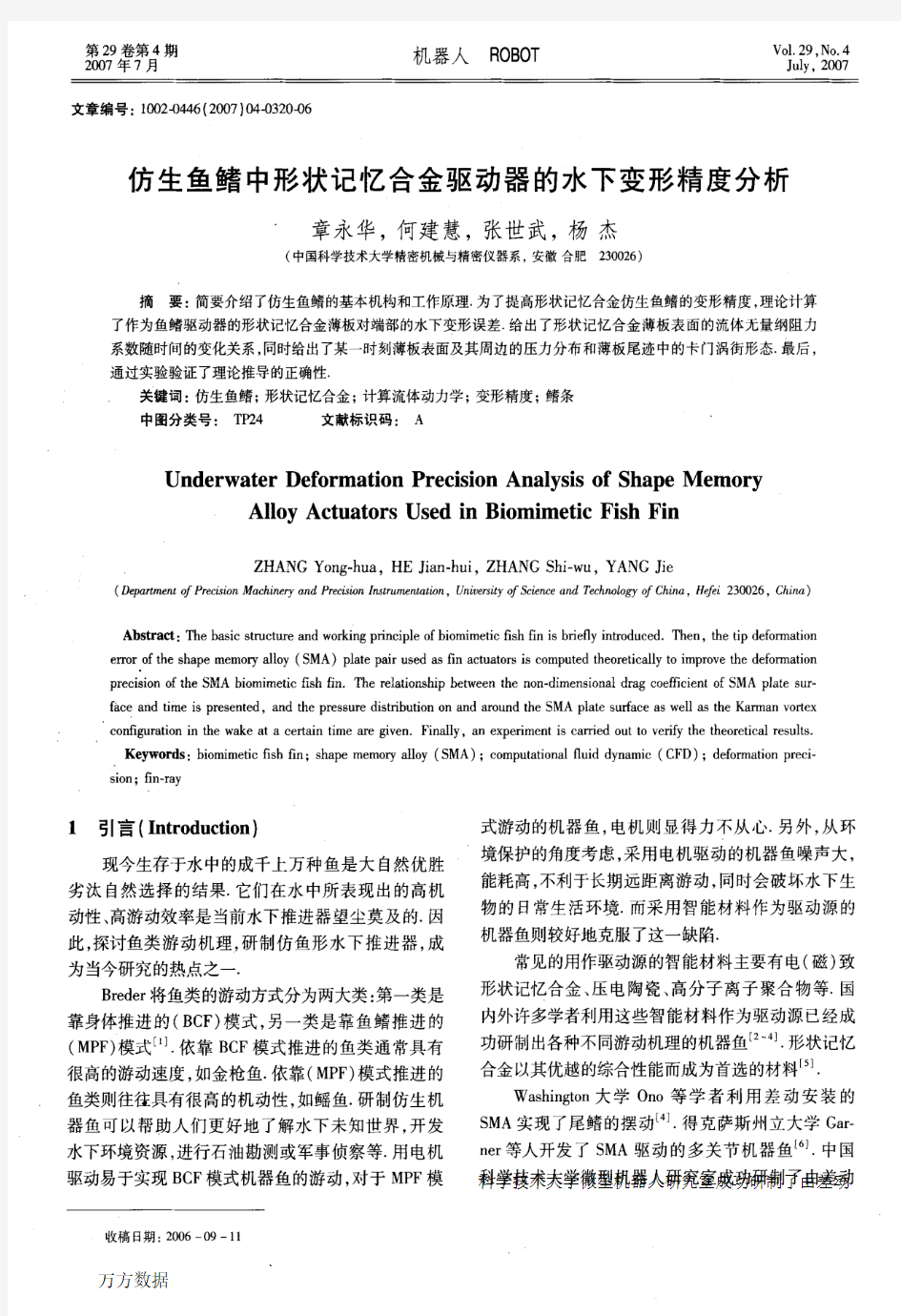
图1所示为基于形状记忆合金薄板阵列的仿生鱼鳍基本结构.主要由鱼鳍根部、固定螺栓、弹性蒙皮、连接滑动栓、连接件和形状记忆合金薄板对阵列组成.基体是仿生鱼鳍的载体,也是鱼鳍与推进器连接的接口;固定螺栓用来使形状记忆合金薄板一端固定在基体上,同时作为给SMA加热的电源电极的一部分;形状记忆合金薄板对由两片具有单向形状记忆效应(形状记忆效应仅仅局限在根部一段)的SMA薄板通过连接件和连接滑动栓连接而成;连接件和连接滑动栓都是作为连接件使用的,主要区别在于连接件位于有主动变形动作(即具有形状记忆效应)的SMA两端,用于连接两个具有单向形状记忆效应的SMA薄板形成差动安装方式,而连接滑动栓用于连接没有主动变形动作(即不具有形状记忆效应)的SMA薄板段.每片SMA薄板外包一层聚亚胺酯弹性薄膜,弹性薄膜除了可以减少两片SMA之间的热耦合和防水之外,还可以调节仿生鱼鳍的柔度.利用靠近根部的一段SMA作为变形源来实现整个薄板的弯曲变形,目的有两个:一是为了减少端部曲线跟踪的误差;二是增加变形曲面的平滑性.对两个SMA薄板施加一定的预应变将其组合成薄板对,作为驱动的基本单元.将若干根SMA薄板对按照图1所示的方式排列,通过控制每对SMA的弯曲变形时序可以实现整个鱼鳍的波动运动.具体的工作原理如下.
给图1所示的SMA薄板对中的一根SMA薄板通电加热.由于温度的变化,SMA发生低温马氏体到高温奥氏体相变,SMA薄板对将朝高温奥氏体相薄板的那一侧弯曲,同时带动对侧马氏体相的SMA薄板一同弯曲.反之,当给另一侧的SMA薄板加热同时冷却对侧的薄板时,按照相同的原理即可发生反相弯曲变形.当给多对SMA薄板加热时,只要每对相邻SMA薄板加热时序问留有一定的相位差,即可实现鱼鳍的波动运动;当加热时序差为0时,则可实现鱼鳍的摆动运动;此外,将仿生鱼鳍作为机器鱼的一部分,通过控制每对SMA薄板对的变形量来调节仿生鱼鳍的姿态,还可以用于辅助机器鱼的制动、上浮或下沉运动.
图1仿生鱼鳍基本结构
Fig.1Basicstructureofbiomimeticfishfin
3变形误差的理论计算(Theoreticcomputa-tionofdeformationerror)
本文将所设计的模型作为尾鳍,利用其摆动功能实现水下推进器的游动,在此应用场合下分析SMA驱动器的变形误差问题.同时,由于鱼鳍外层弹性蒙皮对形状记忆合金驱动器变形的影响非常复杂,作为最初阶段的研究,暂时仅考虑单对形状记忆合金的水中变形误差问题.
SMA薄板对在变形过程中受到流体阻力和偏置回复力的作用,导致其实际位置和理论期望值存在着一定的差异。因此计算这种差异的大小并在控制中加以补偿,可以提高单对形状记忆合金薄板的水下变形精度.这里选择薄板端部的变形误差为例进行分析,其他部位变形误差可以根据相同的原理进行计算.
物体在黏性流体中运动时,一般都会受到阻力作用.这一阻力可以根据物体表面的应力状况来计算,主要包括摩擦阻力和压差阻力两种类型.物体上
切应力对阻力的贡献称作摩擦阻力,是黏性直接作
万方数据
机器人2007年7月
用的结果.而物体上的正应力对阻力的贡献则称作△^=u(茗)l。:。(4)压差阻力,是黏性间接作用的结果,是由于边界层的其中
坌羹警翁襞惑黧嬲冀黧≥跫慧出)=盯(哿出)¨c”c:(5)1
所示的模型,其摩擦阻力和压差阻力可由式()和式』凸n-
(2)分别表示.肘(戈)=,[P(算)出+c3]也+c4(6)F。(f)='/'COSOt山(1)
R(p)=够Apsin础(2)
丁为切应力,P为正应力,理为与X轴方向的夹角,A
为矩形薄板迎风面积.其中A=WS,S为投影面高度,
形为薄板宽度.
图2形状记忆合金薄板对受力分析
Fig.2Forceanalysisofshapememoryalloyplates
则总的流体阻力等于压差阻力和摩擦阻力之
和,如方程(3)所示:
FD=FD(f)+FD(p>=CdpV2A/2
(3)
p为流体密度,y为流速,C。=/(Re)为阻力系数.对
于几何形状相似的物体,流体绕流的阻力系数都仅
与雷诺数(Re)有关.其中R.e=Vd/v,"为流体的运动
黏度,d为流束的定型尺寸.在流体阻力作用下SMA
薄板端部将发生一定的恢复位移量.
图3分布载荷作用下端部位移量计算
Fig.3Computationofthetipdisplacementunderdistributedload
u为薄板绕度曲线;M为弯矩;EA为SMA薄板处于
高温奥氏体相时的杨氏模量;C;(i=1,2,3,4)为常
数;,为薄板的惯性矩,对于长方形截面,其惯性矩
为:.
,=Wh3/12(7)h为薄板厚度;W为薄板宽度.
边界条件为:.
u(石)|删:0堂攀J:0(8)
(IX
J=0
M(石)I越:0了aM(x)I:0。(9)
图4回复力作用下端部位移量计算
Fig.4Computationofthe
tipdisplacementunderrecoveryforce对于受迫变形的SMA薄板,其产生的作用于主动弯曲薄板部分的回复力可由式(10)计算:
FB=6SEMI(3L—a)/a2(10)其中:£为SMA薄板长度;a为回复力作用点离薄板
根部的距离;EM为SMA薄板处于低温马氏体相时的
杨氏模量;s为薄板端部位移.
在此回复力作用下,主动弯瞳的SMA薄板端部将发生一定的恢复位移量△厂B,由式(11)表示:
AA=FBa2(3L—a)/6EA,(11)将式(10)代入式(11),假设上下薄板几何参数一样,
可得:
AA=SEM(3£一a)2/EA(12)则SMA薄板总的端部位置与理论值之间的差值为:
Af=馘+蛎(13)
如图3所示,将SMA薄板视为一端固定的悬臂
梁,在分布载荷F(纠的作用下端部的恢复位移量4数值模拟(Numericalsimulation)
Afw如式(4)所示例:要得出第3部分的理论结果还必需知道F(省)的笺
万方数据
第29卷第4期章永华等:仿生鱼鳍中形状记忆合金驱动器的水下变形精度分析
分布情况,这里采用数值仿真的方法给出水流速度V=0.02m/s、t=53.5s时刻薄板周边的压力分布,由多项式拟合得出此时刻分布载荷F(搿)的方程.选择计算该时刻的压力分布主要原因是:从数值仿真结果可以看出,SMA薄板表面压力随时间做类似正弦变化,t=53.5S时刻的F(戈)值可以近似表示薄板表面在V=0.02m/s情况下所受的平均压力.通过数值模拟还给出了薄板表面压力随时间的变化规律;给出了水流速度变化对压力分布随时间变化的影响;并从流体动力学的角度阐述了压力变化的原因.采用非耦合隐式求解器计算非定常不可压缩Navier—Stokes方程(14)和连续性方程(15)¨0I:
nT,
P祟=F—Vp+p甲2y(14)
JJ0
V?V=0(15)矿为水流速度;p为流体密度;D/Dt为对时间的全微分;F为物体对流体的作用力;P为压力;肛为流体动力粘性系数.
图5SMA薄板表面压力分布(V=O.02m/s、t=53.5S)Fig.5PressuredistributiononSMAplatesurface
图5所示为水流速度V=0.02m/s、t=53.5S时刻SMA薄板表面及其周边流场的压力分布情况.对于上表面,左边界面附近流体静压较大,从左到右呈现逐渐变小趋势;对于下表面,左边界面和右边界面附近的流体静压较小,中间部分压力基本上无明显变化.图6给出了薄板上下表面压力以及总压力(上下表面压力之差)从薄板左边面(根部)到右边面(顶端)的变化曲线.
图中方框■显示的是薄板下表面的压力沿x方向变化的曲线;圆圈●表示薄板上表面的压力沿x方向变化的曲线;三角▲则表示薄板上总的静压沿x方向变化的曲线.根据总压的曲线,通过三次多项式拟合得出该时刻的分布载荷F(x)表达式:
罗(石)=9.0×10—4×(一1.0E一0.6x3
+0.0002x2—0.0122x2+0.6469)R=0.9661(16)其中戈代表沿SMA薄板长度方向的坐标(即x轴坐标);尺为相关系数,它表征曲线拟合的逼近程度,0≤尺≤1,R越接近1表示曲线拟合得越好.
0.000.010.020.030.040,05
x方向位置/m
图6薄板上下表面静压和总压(V=0,02m/s、t=53.5s)Fig.6Staticforceofupperandlowerplatesudaces
aswellasthetotalforce
由于形状记忆合金薄板所受的流体阻力是一个非定常量,其值将随着时间而变化,所以有必要研究其随着时间变化的规律,同时探讨不同流速对薄板阻力变化的影响.为了使所研究的问题更具有一般性,此处采用阻力无量纲系数cd来表述.C。定义如下:
Cd.彘(17)公式中参数的含义可参考方程(3).
图7所示为流体速度分别在o.02m/s、O.06m/s和0.1m/s时阻力系数随时间的变化曲线.在这三种流速下,阻力系数均表现出明显的周期性,并且随着流速的加快周期变短,但阻力系数的峰值增加,从0.02m/s时的平均峰值0.052增大到0。1m/s时的0.063.阻力系数变化的周期性是边界层分离导致的结果,从数值仿真涡量图(图8)可以看出,在薄板的左右边界面处有边界层分离现象发生,导致在薄板尾迹里形成卡门涡街,这种涡街周期性的形成和脱离使得薄板所受的流体阻力呈现周期性变化.阻力系数的峰值趣流速增大而增加,说明流速的增加将导致形状记忆合金薄板在水中的阻力增大.
5
0
5
O
5
0
5
0
5
0
2
2
1
1
O
0
O
1
1
2
万方数据
324
机器人
2007年7月
01020
3040
5060
时间/s
(a)V=0.02
m/s
0
5
10
15
20
25
时间/s
0
2
4
6
8
10
12。14
16
时间/s
fc1
V=0.1
m/s
图7阻力系数随时问的变化
Fig.7
RelationshipbetweenCdandtime
图8薄板尾迹中的卡门涡街(V=0.02
m/s、t=53,5
s)
Fig.8
Karman
vortexstreet
inthewake
将表1中形状记忆合金薄板尺寸参数值和表2中材料特征参数值代人式(4)~(12),并结合数值模
拟的结果,计算出SMA薄板的弯曲变形误差如表3所示.
表1
实验中使用的形状记忆合金薄板尺寸参数Table1
SMA
platesize
parametersusedinexperiment
长度(£)
90
nlfil
宽度(Ⅳ)10/llm厚度(h)
1
IYaTI
回复力位置(o)
‘
60trim端部目标位移量(S)
22
film
转动惯量(,)
5/6mm4
表2实验中使用的形状记忆合金材料特征参数
Table2
SMAmaterialparameters
usedin
experiment
弹性模量奥氏体EA
39-3(GPa)
吗氏体E。
14.8
As50Af
61
相变温度
Ms(TSnaka)40
(oC)
Ms(Brinson)50
Mf(Tanaka)29
Mf(Brinson)
39
应力对相变CMlOMPa/℃温度影响系数
CA
12
MPa/℃
表3计算结果
Table3
Computationalresults
△兀O.85
mm
△靠
O.36nlnl
≮
1.2l
mm
5
实验测试(Experimentaltest)
为了验证理论推导和数值模拟结果的正确性,
我们建立了图9所示的实验系统来测量SMA薄板端部变形误差.实验设备主要包括水洞、函数发生器、
位移传感器、信号采集仪、示波器、主机和导线若干.
水洞可以调节水流速度;函数发生器用来控制SMA薄板的变形;位移传感器用于测量SMA薄板端部的
位移;信号采集仪用来实现信号的放大、滤波和AD
转换等功能;示波器将显示测量结果并把数据传输给主机;主机记录数据做进一步处理.
0
0
0
O
0
0
0
0
0
叮畸∞∞∞吃
0
0
0
0
0
0
峨R7
6543
2
∞
∞∽∽仰叫
口u睡R
万方数据
万方数据
仿生鱼鳍中形状记忆合金驱动器的水下变形精度分析
作者:章永华, 何建慧, 张世武, 杨杰, ZHANG Yong-hua, HE Jian-hui, ZHANG Shi-wu,YANG Jie
作者单位:中国科学技术大学精密机械与精密仪器系,安徽,合肥,230026
刊名:
机器人
英文刊名:ROBOT
年,卷(期):2007,29(4)
被引用次数:4次
参考文献(10条)
1.Sfakiotakis M Flexible Appendage for Positioning and Stabilisation 2006
2.Trease B P;Liu K J;Kota S Biomimetic compliant system for smart actuator-driven aquatic propulsion:Preliminary results[外文会议] 2003
3.Guo S X;Okuda Y Y;Asaka K A novel type of underwater micro biped robot with multi DOF[外文会议] 2004
4.Ono N;Kusaka M;Taya M Design of fish fin actuators using shape memory alloy composites[外文会议] 2004
5.Shinjo N;Swain G W Use of a shape memory alloy for the design of an oscillatory propulsion system 2004(03)
6.Garner L J;Wilson L N;Lagoudas D C Development of a shape memory alloy actuated biomimetic vehicle 1999(05)
7.Zhang Y H;Li S R;Ma J Development of an underwater oscillatory propulsion system using shape memory alloy[外文会议] 2005
8.唐德新;王家楣工程流体力学 2001
9.刘鸿文;林建兴;曹曼玲材料力学 1979
10.Ravi R;William C S;Rainald L Fluid dynamics of flapping aquatic flight in the bird wrasse:Three-dimensional unsteady computations with fin deformation[外文期刊] 2002(19)
本文读者也读过(10条)
1.孙启健.尹维龙.周博.冷劲松.孙寿华形状记忆合金管扭转驱动器的设计[会议论文]-2008
2.李明东.马培荪.奚汉达.储金荻.郝颖明.LI Ming-dong.MA Pei-sun.XI Han-da.CHU Jin-di.HAO Ying-ming一种基于功/能转换效率最高原则的单程形状记忆合金驱动器设计方法[期刊论文]-上海交通大学学报2000,34(3)
3.章永华.何建慧.张世武.董二宝.杨杰.ZHANG Yong-hua.HE Jian-hui.ZHANG Shi-wu.DONG Er-bao.YANG Jie NiTi形状记忆合金驱动的仿生鱼鳍的研究[期刊论文]-机器人2007,29(3)
4.胡天江.沈林成.李非.王光明.韩小云.HU Tian-jiang.SHEN Lin-cheng.LI Fei.WANG Guang-ming.HAN Xiao-yun 仿生波动长鳍运动学建模及算法研究[期刊论文]-控制理论与应用2009,26(1)
5.宋艳.章永华.张世武.杨杰.SONG Yan.ZHANG Yong-hua.ZHANG Shi-wu.YANG Jie柔性仿生鱼鳍中形状记忆合金鳍条的优化设计[期刊论文]-机械与电子2009(5)
6.谢海斌.沈林成.XIE Hai-bin.SHEN Lin-cheng柔性长鳍波动推进流体动力测试平台[期刊论文]-控制理论与应用2007,24(6)
7.张兴悟.董二宝.章永华.杨杰.ZHANG Xing-wu.DONG Er-bao.ZHANG Yong-hua.YANG Jie基于DSP的移动机器人智能信号采集处理模块研究[期刊论文]-机械与电子2006(10)
8.林龙信.沈林成.张代兵.LIN Long-xin.SHEN Lin-cheng.ZHANG Dai-bing仿生波动鳍的试验研究[期刊论文]-哈尔滨工程大学学报2008,29(5)
9.周黎黎.李杰.薛伟辰形状记忆合金驱动性能研究与应用进展[会议论文]-2004
10.金鸿章.王帆.马玲.JIN Hongzhang.WANG Fan.MA Ling零航速减摇鳍鳍型参数估算方法[期刊论文]-中国造船2011,52(2)
引证文献(4条)
1.阿衍学.李彦萍.栾兆辉SMA驱动器在微小型仿生机器鱼上的应用[期刊论文]-机械工程师 2009(8)
2.宋艳.章永华.张世武.杨杰柔性仿生鱼鳍中形状记忆合金鳍条的优化设计[期刊论文]-机械与电子 2009(5)
3.杭观荣.王振龙.李健.王扬威基于柔性鳍单元的尾鳍推进微型机器鱼设计研究[期刊论文]-机器人 2008(2)
4.Yong-hua Zhang.Yan Song.Jie Yang.K. H. Low Numerical and Experimental Research on Modular Oscillating Fin[期刊论文]-仿生工程学报(英文版) 2008(1)
引用本文格式:章永华.何建慧.张世武.杨杰.ZHANG Yong-hua.HE Jian-hui.ZHANG Shi-wu.YANG Jie仿生鱼鳍中形状记忆合金驱动器的水下变形精度分析[期刊论文]-机器人 2007(4)
形状记忆合金论文
形状记忆合金 摘要:扼要地叙述了形状记忆合金及其机理, 介绍了形状记忆合金在工程中应用的现状以及发展前景。 关键词:形状记忆合金、形状记忆合金效应、应用 引言:有一种特殊的金属材料,经适当的热处理后即具有回复形状的能力,这种材料被称为形状记忆合金( Shape Memory Alloy ,简称为SMA) ,这种能力亦称为形状记忆效应(Shape Memory Effect , 简称为SME) 。通常,SMA 低温时因外加应力产生塑性变形,温度升高后,克服塑性变形回复到所记忆的形状。研究表明, 很多合金材料都具有SME ,但只有在形状变化过程中产生较大回复应变和较大形状回复力的,才具有利用价值。到目前为止,应用得最多的是Ni2Ti 合金和铜基合金(CuZnAl 和CuAlNi) 。 形状记忆合金(Shape Memory Alloys, SMA)是一种在加热升温后能完全消除其在较低的温度下发生的变形,恢复其变形前原始形状的合金材料。除上述形状记忆效应外,这种合金的另一个独特性质是在高温(奥氏体状态)下发生的“伪弹性”(又称“超弹性”,英文 pseudoelasticity)行为,表现为这种合金能承载比一般金属大几倍甚至几十倍的可恢复应变。形状记忆合金的这些独特性质源于其内部发生的一种独特的固态相变——热弹性马氏体相变。 一、形状记忆合金的发展史 最早关于形状记忆效应的报道是由Chang及Read等人在1952年作出的。他们观察到Au-Cd合金中相变的可逆性。后来在Cu-Zn合金中也发现了同样的现象,但当时并未引起人们的广泛注意。直到1962年,Buehler及其合作者在等原子比的TiNi合金中观察到具有宏观形状变化的记忆效应,才引起了材料科学界与工业界的重视。到70年代初,CuZn、CuZnAl、CuAlNi等合金中也发现了与马氏体相变有关的形状记忆效应。几十年来,有关形状记忆合金的研究已逐渐成为国际相变会议和材料会议的重要议题,并为此召开了多次专题讨论会,
关于形状记忆合金在变体机翼方面的应用综述
关于形状记忆合金在变体机翼方面的应用综述 发表时间:2019-05-13T15:59:02.707Z 来源:《知识-力量》2019年8月26期作者:纪宇帆[导读] 形状记忆合金是目前很常用的一种智能材料,能够代替传统材料应用在广泛的工业领域。本文将通过综合比较分析不同文献及其理论依据,阐述形状记忆合金在航空航天领域的应用情况 (北京航空航天大学能源与动力工程学院,北京 100191) 摘要:形状记忆合金是目前很常用的一种智能材料,能够代替传统材料应用在广泛的工业领域。本文将通过综合比较分析不同文献及其理论依据,阐述形状记忆合金在航空航天领域的应用情况,并对目前存在的问题和未来发展的方向一一论述。在变体机翼方面,文章从中文文献和外文文献中分别选取了几篇有代表性的进行阐述,分析得到了国内外不同研究方向的侧重点以及未来的发展趋势。同时文章对形状记忆合金在航空航天领域的应用情况做了小结,提出了一些个人观点与评价,也指出了目前存在的问题与未来发展的方向。关键词:形状记忆合金;航空航天;国内外对比 引言 传统材料通常不能实时感知环境以及自身状态的变化,更不能做到自适应和自修复[1]。因此,在诸多工业领域,尤其是航空航天这样复杂多变的领域,需要越来越多智能材料才可以实现高精度控制。形状记忆合金就是其中一种常见的智能材料。它利用形状记忆效应可以实现不同于普通合金的优异性能,尤其是在高温环境下,抗疲劳性能和延展性能更加凸显。 1 问题提出 早在20世纪50-70年代,就有了变后掠翼技术。这使得飞机兼具低速、跨声速、超声速飞行性能,但也存在结构复杂、操纵困难等问题,变形形式也很单一[2]。随着科学技术的进步,智能变体机翼技术逐渐兴起。在美国的主导下,一系列智能变形技术验证试验得以展开:1979年,NASA与波音公司签订了任务自适应机翼技术合同;1985年,NASA与罗克韦尔公司合作开展主动柔性机翼计划;1996年,上述计划又扩展为主动气动弹性机翼计划。U.Icardi等人也提出了一种基于SMA的变弯度机翼方案[3]:依靠两个同轴的SMA驱动管,通过离合器与定位压电电机连接到翼肋的桁架上,内外管分别控制向上与向下的运动;工作时可以给其中一个加热,另一个隔离使其不参与工作,从而实现特定方向的变形[4]。总之,SMA在变体机翼上的应用很广泛,是值得深入研究的问题之一。 2 中文文献综述 就近几年的中文文献来说,有关SMA在变体机翼上的应用的文章有53篇,其中期刊论文16篇,博士论文5篇,其余为硕士论文。下面将选择一些进行深入分析。刘逸峰、徐志伟两人利用驱动器的两个驱动杆上下位移实现蒙皮的变形,通过控制流经SMA的电流大小和通电时间对驱动器进行测控,还进行了驱动器加载控制实验和机翼风洞吹风测试实验[5];雷鹏轩等人提出一种悬臂梁式柔性偏转结构,选择超临界翼型进行实验,并通过数学计算和折线图比较的办法给出了来流条件对SMA结构变形的影响[6];周本昊通过差动驱动方式设计驱动机构,对机翼的各个部位进行了应力分析,又设计了测控系统,利用离散化PID控制算法对被控量进行控制[7];刘俊兵等人根据实验分析出SMA卷簧的变形角与扭矩的关系,并对该驱动器承载能力进行了计算[8];董二宝将智能变形机翼结构按动力学特性分为非主动变形过程和主动变形过程,并据此求出了各参数的最优解,最后利用SMA的热-力耦合特性给出了仿真结果[9];聂瑞等人为了减小自适应机翼的波阻,对激波控制鼓包的特性进行了优化研究,在温度改变时,SMA能自动改变自身构型[10]。 3 外文文献综述 就近几年的外文文献来说,有关SMA在变体机翼上的应用的文章有81篇。不同作者对SMA的研究有不同的侧重点。Cees Bil等人主要研究的是三种不同的控制方法对机翼变形的影响,还在其中考虑了气动载荷下驱动器所需的功率与环境温度的影响[11];S.Barbarino等人将民用运输机机翼后缘处的翼型弯度通过无铰链的光滑变形襟翼控制,利用数值方法和实验研究对驱动性能进行了估计[12];J Colorado等人从仿生学的角度分析SMA在变体机翼中的驱动作用,并且利用SMA的传感功能实现了令人满意的跟踪误差,但在疲劳问题上还存在一定局限,SMA承受较大应力时寿命较短[13];Thomas Georges等人以设计具有柔性外拱的变形机翼为重点,通过应力应变关系计算SMA元件的横截面和长度,进而确定其他部件的尺寸,完成设计[14];Woo-Ram Kang等人为防止气动损失,利用SMA控制机翼形状,并用多种数值模拟软件将其与未变形机翼作比较,对尾翼偏转角与电流、压差之间的关系作了进一步分析[15];Salvatore Ameduri等人基于SMA技术对变形结构进行优化,由四个弹性元件构成可变形肋系统,利用有限元模型呈现其主要特征[16]。 结论 综合上述文献,可以看出SMA在变体机翼中应用广泛。不同学者从不同侧面研究SMA可以得到不同结果。国内研究更多是通过解析的办法分析驱动结构的可行性,计算和优化更准确,但有时会受到其他无法量化的因素影响,导致其结果偏离实际;国外研究则更加侧重数值模拟软件的应用,对驱动性能的分析综合考虑多种环境因素,在实验过程中也更加注重比较,并且对SMA的疲劳寿命有所估计。后续的SMA应用技术应该朝向更高的疲劳强度、更先进的数值模拟技术发展。与此同时,机翼的形状变化也应趋于平稳,以减少气流分离,使飞机拥有更好的气动性能。 未来形状记忆合金在航空航天领域将朝着更规范化、成熟化的方向前进:变体机翼的重量将进一步减轻,连接过渡将更加平缓,气流分离损失将进一步减少,机翼的颤振情况也将进一步改善;航空发动机中的结构将充分考虑其材料特性,不仅仅用于调节尾喷口、进气口,还可用于涡轮叶片,机匣等关键部件;卫星的发射也将更加可靠,连接分离装置运行也会更加平稳。参考文献 [1]杨正岩,张佳奇,高东岳,刘科海,武湛君.航空航天智能材料与智能结构研究进展[J].航空制造技术,2017(17):36-48. [2]朱倩.基于SMA的变体机翼精确控制研究[D].南京航空航天大学,2010. [3]Icardi,U.& Ferrero,L.(2010).SMA Actuated Mechanism for an Adaptive Wing. Journal of Aerospace Engineering - J AEROSP ENG. 24. 10.1061/(ASCE)AS.1943-5525.0000061. [4]张明德.变厚度机翼结构设计及精确控制[D].南京航空航天大学,2018. [5]刘逸峰,徐志伟.SMA驱动变厚度机翼结构设计及实验研究[J].江苏航空,2018(04):30-34.
水下推进器选型计算
水下推进器计算及选型 1.已知参数及条件 可双渠道供水,单渠渠宽3 m,渠有效长约128 m,水深4.1 m,日供水6万T,日取水量6.54万T,平时为单渠道供水。渠内正常供水时,水流速为0.1 m/s,含沙量为20~40mg/l,沙粒直径0.1~2mm,每月排沙一次,排沙时,推进器启动前两端闸门关闭,则渠内水流动速度为0 m/s,推进器启动后要使明渠内水中泥沙经推进器搅拌及推动而不沉淀渠内水流动速度应不小于2m/s。 2.渠内水中启动推力的计算 设计院经过设计计算,确定要使渠内水中泥沙流动而不沉淀,其水流速应不小于2m/s。要使渠内水的流速达到设定值,根据动量定理,设作用在水上的合外力即推进器对水的推力为F,则有 F=ρQ(β2ν2-β1ν1)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈(1)式中ρ—液体密度(kg/m3),这里为砂水混合后的密度; Q—渠内过水流量(m3/s); β1、β2—动量修正系数,工程实际应用时可取β1=β2=1; ν1、ν2—渠内过水前、后流动速度(m/s)。 又知,Q=Aν2=Bhν2 式中A—渠内过水截面积(m2); B—渠宽度(m); h—渠内水深(m)。 则(1)式变为 F=ρBhν2 (ν2-ν1)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈(2)从前面工程设计参数中已知 B=3(m);h=4.1(m);ν2=2(m/s);ν1≈0(m/s);含沙量取30mg/l=30 g/ m3 =0.03 kg/m3 液体密度ρ可通过下面公式求得。 液体密度ρ=(单渠每月沉沙量+单渠内纯净水质量)/单渠内沙水混合体积。 而单渠每月沉沙量=单渠每月过水量×平均含沙量=(日取水量×30)×平均含沙量=(65400×30)×0.03=58860( kg)。 单渠内沙水混合体积=渠宽度×渠内水深×渠长=3×4.1×128=1574.4(m3) 沉沙应占体积=每月沉沙量/沙的理论密度=58860/1000/2.65=22.21(m3) 渠内水应占体积=单渠内沙水混合体积-沉沙应占体积=1574.4-22.21=1552.19(m3) 单渠内纯净水质量≈渠内水应占体积×纯净水密度 =1552.19×1000=1552190 (kg)
形状记忆合金论述3000字论文
形状记忆合金论述 摘要:形状记忆合金,是一种在加热升温后能完全消除其在较低的温度下发生的形变,恢复其形变原始形狀的合金材料。这种合金在高温(奥氏体状态)下发生的“伪弹性”行为,表现为这种合金能承载比一般金属大几倍甚至几十倍的可恢复应变。形状记忆合金的这些独特性质源于其内部发生的一种独特的固态相变——热弹性马氏相变体。 关键词:形状记忆合金、马氏相变体、记忆效应 引言:形状记忆合金材料兼有传感和驱动的双重功能,是一种智能结构中技术成熟性很高的功能材料,可以实现机械结构的微型化和智能化。形状记忆效应(SME)即某种材料在高温定形后,冷却到低温(或室温),并施加变形,使它存在残余变形[1,2]。当温加热超过材料的相变点,残余变形即可消失,恢复到高温时的固有形状,如同记住了高温下的状态。SMA及其驱动控制系统具有许多的优点,如高功率重量比,适于微型化;集传感、控制、换能、致动于一身,结构简单,易于控制;对环境适应能力强,不受温度以外的其他因素影响等,有着传统驱动器不可比拟的性能优点。形状记忆合金由于具有许多优异的性能,因而广泛应用于航空航天、机械电子、生物医疗、桥梁建筑、汽车工业及日常生活等多个领域。 一、发展史 1932年,瑞典人奥兰德在金镉合金中首次观察到"记忆"效应,即合金的形状被改变之后,一旦加热到一定的跃变温度时,它又可以魔术般地变回到原来的形状,人们把具有这种特殊功能的合金称为形状记忆合金。记忆合金的开发迄今不过20余年,但由于其在各领域的特效应用,正广为世人所瞩目,被誉为"神奇的功能材料"。 最早关于形状记忆效应的报道是由Chang及Read等人在1952年作出的。他们观察到Au-Cd合金中相变的可逆性。后来在Cu-Zn合金中也发现了同样的现象,但当时并未引起人们的广泛注意。直到1962年,Buehler及其合作者在等原子比的TiNi合金中观察到具有宏观形状变化的记忆效应,才引起了材料科学界与工业界的重视。到70年代初,CuZn、CuZnAl、CuAlNi等合金中也发现了与马氏体相变有关的形状记忆效应。几十年来,有关形状记忆合金的研究已逐渐成为国际相变会议和材料会议的重要议题,并为此召开了多次专题讨论会,不断丰富和完善了马氏体相变理论。在理论研究不断深入的同时,形状记忆合金的应用研究也取得了长足进步,其应用范围涉及机械、电子、化工、宇航、能源和医疗等许多领域。 二、功能机理 形状记忆合金(Shape Memory Alloys,简称SMA)是一种能够记忆原有形状的智能材料。当合金在低于相变态温度下,受到一有限度的塑性变形后,可由加热的方式使其恢复到变形前的原始形状,这种特殊的现象称为形状记忆效应(Shape Memory Effect,简称SME)。而当合金在高于相变态温度下,施以一应力使其受到有限度的塑性变形(非线性弹性变形)后,可利用直接释放应力的方式使其恢复到变形前的原始形状,此种特殊的现象又称为拟弹性(Pseudo Elasticity,简称PE)或超弹性(Super Elasticity)。这两种形状记忆合金所拥有的独特性质在普通金属或合金材料上是无法发现的。
水下推进器安全操作规程通用版
操作规程编号:YTO-FS-PD398 水下推进器安全操作规程通用版 In Order T o Standardize The Management Of Daily Behavior, The Activities And T asks Are Controlled By The Determined Terms, So As T o Achieve The Effect Of Safe Production And Reduce Hidden Dangers. 标准/ 权威/ 规范/ 实用 Authoritative And Practical Standards
水下推进器安全操作规程通用版 使用提示:本操作规程文件可用于工作中为规范日常行为与作业运行过程的管理,通过对确定的条款对活动和任务实施控制,使活动和任务在受控状态,从而达到安全生产和减少隐患的效果。文件下载后可定制修改,请根据实际需要进行调整和使用。 1、水下推进器启动前检查电机定子绕阻对地绝缘电阻,最低不得低于50兆欧,检查接地是否牢固、电缆绑扎是否合理及叶轮旋转方向。 2、在确认可以启动后,手动状态下现场人员直接按绿色〖启动〗按钮启动,自动状态下通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。 7、在接到生产部关闭指令后,手动状态下按红色〖停
北京大学科技成果——RoboShark智能仿生深海潜航器
北京大学科技成果——RoboShark智能仿生深海潜航器 项目简介 本项目产业化的市场定位为需要长时间、远航程可进行水下目标侦测及定位的单位。RoboShark智能仿生深海潜航器采用鲨鱼为原型,以三关节仿生尾鳍取代无刷推进器,有效降低设备运行噪声的同时节省了能量消耗。设备外壳采用吸音材料制成,可以提高设备的隐蔽性。通过重力舱吸排水实现设备的上浮下潜,控制更为灵活,具有定点悬停、定深巡游等多种智能运动功能,最大下潜深度可达1000m。 此潜航器的主要特点: 1.节能高效:采用仿生+滑翔作为动力源,利用反卡门涡街的驱动原理,仿生推进效率高达80%; 2.隐蔽环保:模拟鲨鱼的外形与游动方式,隐蔽性强,对环境扰动小,不会伤害水下生物; 3.安全可靠:采用整体开放,局部密封的设计,配备六方向避障
传感器,具有低电量返航、失联返航等功能; 4.载荷扩展:可搭载声、光、电、磁传感器,满足水下通信、水下定位和水下探测等需求。 应用范围 RoboShark具有长续航、低噪音的优势,适合用于长时间的水下巡游、水下追踪等任务。可完成海洋勘探,包括海洋科考、水质监测、地貌测绘等任务;水下作业,包括海底管道检测、水下打捞、大坝巡检等任务;军事上可应用于目标侦查、搜寻、定位及排爆等复杂任务。RoboShark多关节仿生机器鱼根据应用场景和使用需求,除高精度GPS、深度计、九轴姿态传感器以及远距离射频通信等标准模块外,还可以搭载声呐设备、水声通讯设备,进一步的丰富产品功能。 项目阶段 本项目已经做出工程机,可根据实际需求进行定制化开发。主要性能参数如下: 1.续航能力:15天(滑翔推进)/8小时(尾鳍推进) 2.最大下潜深度:1000m 3.导航:GPS、惯性导航 4.通信距离:开阔水域可达3km(可选配卫通模块) 5.最大巡游速度:1.5m/s,五级速度可调 6.最大负载能力:25kg 知识产权已申请相关专利。 合作方式技术服务。
磁控形状记忆合金高精度驱动器研究
目录 摘要.................................................................................................................................... I Abstract ................................................................................................................................. I I 第1章绪论. (1) 1.1 研究背景及意义 (1) 1.2 MSMA及其驱动器的研究现状 (1) 1.2.1 MSMA驱动器的研究现状 (1) 1.2.2 MSMA研究现状 (5) 1.2.3 MSMA的磁控记忆特性和驱动器工作原理 (6) 1.2.4 MSMA的本构模型 (8) 1.3 MSMA的磁滞非线性及其控制方法 (11) 1.4 本文的研究内容 (12) 第2章磁控形状记忆合金特性实验研究 (14) 2.1 MSMA材料测试实验原理 (14) 2.2实验材料和测试设备介绍 (14) 2.2.1实验样品 (14) 2.2.2实验设备 (15) 2.3 MSMA实验数据分析 (16) 2.4本章小结 (23) 第3章磁控形状记忆合金驱动器结构设计 (24) 3.1 MSMA驱动器磁路设计 (24) 3.1.1磁路中软磁材料的选择 (24) 3.1.2磁路的结构 (25) 3.1.3 线圈匝数的计算 (26) 3.2磁路系统仿真 (27) 3.3 MSMA驱动器恢复形变的方式 (29) 3.4 磁控形状记忆合金驱动器结构模型 (31) 3.5本章小结 (32)
巨鱿仿生水下机器人
浙江海洋学院 “巨鱿”水下机器人“Architeuthis Dux” Underwater Vehicle 船舶与海洋工程--智慧海洋研发团队 2012-6-1——2012-8-29
起 点 终点 第一期,挑战竞赛设计 Underwater Vehicle 设计要求 比赛场地: 海洋航行器按申报功能进行5分钟的实航。室内游泳池(长50米,宽21米,深2米,池壁等间距布设8台水下摄像机)。比赛场地上有若干限宽门,门宽1m ,高度为从池底起出水0.5m ,涂装醒目的颜色。比赛中除非航行器沉底,否则不得人工干预比赛。 起点--终点 限宽门布设图→→→ 技术要求,各种设计不做限制。 动力装置:鼓励采用除螺旋桨之外的推进器; 姿态控制:鼓励采用除鳍舵之外的姿态控制方式; 控制方式:鼓励采用除人工遥控控制之外的控制方式; 数据传输:安装数据链路,在地面实时显示航行轨迹。 系统使用频率要求:系统使用频率应符合国家无线电管理委员会的频率分配规定,参赛者应在规定时间上报系统使用频率,一经上报不能改变。现场不能随意开机,届时赛场将备扫频仪和GPS 信号监视设备,违例将被取消参赛资格。 评分要点:根据航行器航行姿态、航线航行、穿越限宽门(或避障碍)、动力方式、航行控制的方式、航行控制的精确性和稳定性、抗过载结构设计等内容评分,设加分项。分值包含航行评分、功能评分,系评分项 加分项 1. 使用新型推进方式 5-10 2. 使用新型导航控制方式 5-10 3. 装载前视或下视或侧视摄像装置,且可实时下传图像供地面显示 3-5 4. 具备下潜持续航行能力 2-5 5. 总体设计新颖 2-5 6. 加工水平 2-5 7. 航海文化创意 1-5 8. 其它功能(每项) 1-2
形状记忆合金综述
形状记忆合金 摘要:扼要地阐述了形状记忆合金机理、常用制备方法、介绍了形状记忆合金的发展前景。 关键词:形状记忆合金、形状记忆效应、NiTi、锻造、热挤压、轧制、拉拔、冷加工、粉末成形、包套碎片挤压成形、溅射沉积薄膜 引言:形状记忆合金是指具有一定初始形状的合金在低温下经塑性变形并固定成另一种形状后,通过加热到某一临界温度以上又可恢复成初始形状的一类合金。形状记忆合金具有的能够记住其原始形状的功能称为形状记忆效应。研究表明,很多合金材料都具有SME,但只有在形状变化过程中产生较大回复应变和较大形状回复力的,才具有利用价值。到目前为止,应用最多的是Ni2Ti合金和铜基合金。 形状记忆合金作为一种特殊的新型功能材料,是集感知与驱动于一体的智能材料,因其功能独特,可以制作小巧玲珑,高度自动化、性能可靠的元器件而备受瞩目,并获得了广泛应用。 1 形状记忆效应的机理 具有马氏体逆转变,且M s与A s温度相差很小的合金,将其冷却到M s点一下,马氏体晶核随着温度下降逐渐长大,温度上升的时候,马氏体相又反过来同步地随温度升高而缩小,马氏体相的数量随温度的变化而发生变化,这种马氏体称为热弹性马氏体。 在M s以上某一温度对合金施加外力也可引起马氏体转变,形成的马氏体称为应力诱发马氏体。有些应力诱发马氏体也属弹性马氏体,应力增加时候马氏体长大,反之,马氏体缩小,应力消除后马氏体消失,这种马氏体称为应力弹性马氏体。应力弹性马氏体形成时会使合金产生附加应变,当除去应力时,这种附加应力也随之消失,这种现象称为超弹性或者伪弹性。 将母相淬火得到马氏体,然后使马氏体发生塑性变形,变形后的合金受热时,马氏体发生逆转变,开始回复母相原始状态,唯独升高至A f时,马氏体消失,合金完全恢复到母相原来的形状,呈现形状记忆效应。如果对母相施加应力,诱发其马氏体形成并发生形变,随后逐渐减小应力直至除去时,马氏体最终消失,合金恢复至母相的原始形状,呈现伪弹性。 2 形状记忆合金的加工方法 加工工艺:锻造→热挤压→轧制和拉拔→冷加工→粉末成型→
几种水下推进器介绍及超小型水下推进器开发设计
几种水下推进器介绍及超小型水下推进器开发设计
几种水下推进器装置 水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。为了争夺制海权,各国都在开发各种用途的水下机器人。以下介绍几种最新的水下推进器: 1 泵喷推进器 上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海 狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。 图1 “北风之神”级核潜艇尾部泵喷射推进器特写 采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。
图2 泵喷推进器设计三维图 随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。 2 WT系列蛙人助推器 武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。水下推进器系列采用先进可靠的驱动方式,力图给使用者提供最强劲持久的推进力。该产品广泛应用于水下蛙人推进、水底拍摄、潜水娱乐及辅助水下救生等。 图3 WT1-50系列水下推进器 WT1-50系列水下推进器体积小、重量轻,采用蓄电池作动力,设有电池容量显示,充电方便。在水中呈零浮力状态。采用特殊的密封结构。使用维护简单、安全、可靠。最大潜水深度为50米,可以给您的水中航行带来前所未有的体验。其主要技术参数见表1。 适用场合:单人水下蛙人推进、水底拍摄、潜水娱乐
水下推进器安全操作规程
编号:CZ-GC-00890 ( 操作规程) 单位:_____________________ 审批:_____________________ 日期:_____________________ WORD文档/ A4打印/ 可编辑 水下推进器安全操作规程 Safety operation rules for underwater thruster
水下推进器安全操作规程 操作备注:安全操作规程是要求员工在日常工作中必须遵照执行的一种保证安全的规定程序。忽视操作规程 在生产工作中的重要作用,就有可能导致出现各类安全事故,给公司和员工带来经济损失和人身伤害,严重 的会危及生命安全,造成终身无法弥补遗憾。 1、水下推进器启动前检查电机定子绕阻对地绝缘电阻,最低不得低于50兆欧,检查接地是否牢固、电缆绑扎是否合理及叶轮旋转方向。 2、在确认可以启动后,手动状态下现场人员直接按绿色〖启动〗按钮启动,自动状态下通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。
7、在接到生产部关闭指令后,手动状态下按红色〖停止〗按钮关闭,自动状态下由中控室点击关闭按钮关闭水下推进器。 8、保持水下推进器平台情节卫生,并按要求填写水下推进器运行记录。 这里填写您的公司名字 Fill In Your Business Name Here
形状记忆合金及应用
形状记忆合金及应用 XXX (化学化工学院材料化学材料化学1001) 摘要形状记忆效应自20世纪30年代报道以来逐步得到人们的重视并加以应用,本文扼要地叙述了形状记忆合金及其机理以及在一些领域的应用。 关键词形状记忆合金原理应用 Abstract The shape memory effect since the 1930s reported gradually get people's attention and application, this paper briefly describes the application of shape memory alloy and its mechanism, and in some areas. Key words Shape memory alloys Principle Application 1.引言 形状记忆合金( Shape Memory Alloy, 简称SMA) 是指具有一定初始形状的合金在低温下经塑性形变并固定成另一种形状后, 通过加热到某一临界温度以上又可恢复成初始形状的一类合金。形状记忆合金是一类具有形状记忆性能的合金, 其主要特征是具有形状记忆效应(SME)[1]。研究表明, 很多合金材料都具有SME, 但只有在形状变化过程中产生较大回复应变和较大形状回复力的, 才具有利用价值。到目前为止, 应用得最多的是Ni-Ti合金和铜基合金( CuZnAl 和CuAlNi) 。 2.SMA 2.1 发现历史 形状记忆效应是张禄经和Read在1951年在AuCd合金中最早观察到的[2], 直到1963年Buehler的课题组在Ni-Ti合金中发现了类似的形状记忆效应之后[3],才真正引起很多科学家的重视。 2.2 晶体学特性 SME 的本质是合金中的热弹性马氏体相变[4]。马氏体相变发生的能量条件是马氏体的化学自由能必须比母相的低。也就是说,只有当母相过冷到马氏体相与母相化学自由能平衡温度T0以下适当温度Ms 时,马氏体将长大,直到热化学自由能和弹性非化学自由能两者之差最小时,马氏体的生长过程才告结束。同样,只有当马氏体过热到T0以上温度As 时, 在相变驱动力作用下, 马氏体缩小的逆转变过程才能开始。这种马氏体的长大或缩小受热效应和弹性效应两因素平衡条件的制约的相变称为“热弹性马氏体相变”。相变并不是发生在某一温度点, 而是一个温度范围, 不同的合金系具有不同的温度范围。 图1 相变温度曲线 图( 1) 显示了相变特性及相变循环中的关键点, 其中Ms, Mf为马氏体相变的开始和结束时的温度, As,Af为逆相变的起始和结束温度,人们通常用相变温度Af表征合金的特性。多数的合金, 相变发生在较窄的温度范围内, 而且伴随着滞后现象,以致加热与冷却的转变过
ANSYS材料非线性记忆金属解析
ANSYS材料非线性+几何非线性分析之 记忆合金
ANSYS材料非线性+几何非线性分析之 记忆合金 问题背景: 在20世纪60年代由美国海军武器实验室发现了镍钛合金的记忆属性,并称之为SMA,其中它的最主要的使形状记忆效应、伪弹性效应、类橡皮性。本课题主要研究SMA金属在矫正牙齿方面的应用,基于ansys软件的有限元分析,得到记忆金属在发生变形后内部的应力状况,以及释放位移后金属的残余应力,而且可以得到金属在加载和卸载过程中的应力应变曲线,这对于设计牙套非常有帮助。 关键词记忆金属分步加载应力应变曲线 问题描述: 如图所示的模型,当A和B点向外拉开的时候,将牙卡在3和11之间,然后释放A和B由于金属具有记忆属性,它会对牙有一个压力,这样的话就能达到矫正牙齿的作用。由于对称性,我们可以建立一半模型来分析。先对B施加一个x方向的位移5mm,然后再施加一个x方向的位移2mm。分析模型的等效应力图和等效应力与应变关系图。 图1.模型
材料的参数 图2.材料参数实验步骤: 1.实验分析模型Structure 图3.分析模型2.选择材料的单元类型solid182和solid185 图4.材料单元类型
3.输入材料的各项参数。 图5.弹性模量和泊松比 图6.记忆金属各项参数4.建立平面点坐标 图7.点坐标
5.利用指令“a,1,9,10,8”建立平面 图8.平面图6.通过直线和倒角,建立曲线 图9.曲线图7.进行拉伸操作建立三维立体图形 图10.立体图
8.画网格将网格的大小设置为0.15,然后通过sweep画全部的网格。 图11.画完网格后的图形 9.在左上角端部施加固定端约束 图12.施加固定端约束 10.施加位移载荷,分两个步骤。第一,在右下角处施加x方向5mm 的面位移,写入载荷步“lswrite,1”; 图13.第一次加位移
几种水下推进器介绍及超小型水下推进器开发设计
水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。为了争夺制海权,各国都在开发各种用途的水下机器人。以下介绍几种最新的水下推进器: 1?泵喷推进器 上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。 图1 ?“北风之神”级核潜艇尾部泵喷射推进器特写 采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。 图2? 泵喷推进器设计三维图
随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。 2 WT系列蛙人助推器 武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。水下推进器系列采用先进可靠的驱动方式,力图给使用者提供最强劲持久的推进力。该产品广泛应用于水下蛙人推进、水底拍摄、潜水娱乐及辅助水下救生等。 图3? WT1-50系列水下推进器 WT1-50系列水下推进器体积小、重量轻,采用蓄电池作动力,设有电池容量显示,充电方便。在水中呈零浮力状态。采用特殊的密封结构。使用维护简单、安全、可靠。最大潜水深度为50米,可以给您的水中航行带来前所未有的体验。其主要技术参数见表1。 适用场合:单人水下蛙人推进、水底拍摄、潜水娱乐 表1 WT1-50系列主要技术参数表 型号 尺寸重蓄电电动机 速最潜水备
水下推进器安全操作规程(正式)
水下推进器安全操作规程(正 式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 1、水下推进器启动前检查电机定子绕阻对 地绝缘电阻,最低不得低于50兆欧,检查接地 是否牢固、电缆绑扎是否合理及叶轮旋转方 向。 2、在确认可以启动后,手动状态下现场人 员直接按绿色〖启动〗按钮启动,自动状态下 通知中控室值班人员点击启动按钮启动。 3、在正常运行后,每隔1小时去现场巡视
一次,察看有无杂音、振动及跳闸等异常现象,如有异常及时汇报生产部。 4、每个月应将水下推进器起吊清理钢丝绳上的垃圾,并检查起吊环、吊环扣、钢丝绳的磨损情况,视磨损程度及时更换。 5、在未切断电源时,任何人不得移动水下推进器,人也不得进入水中。 6、如长期浸在水中停止运行,应每隔15天让其运行4小时,以检查其功能和适应性,或提起放在干燥处。 7、在接到生产部关闭指令后,手动状态下按红色〖停止〗按钮关闭,自动状态下由中控室点击关闭按钮关闭水下推进器。 8、保持水下推进器平台情节卫生,并按要求填写水下推进器运行记录。
请在这里输入公司或组织的名字Please enter the name of the company or organization here
水下推进器在转子结构特点
水下推进器在转子结构特点 本世纪六十年代起,能源的利用已引起工程界的广泛重视。另外,由于科学业技术的发展,水下推进器使用旋转机械技术的可靠性也大有提高。这样就引起了某些工业生产流程中动力机械的重大改革,其中较好主要的是化工流程中的电动机-活塞压气机被工业水下推进器离心压缩机所代替。 现代的水下推进器中使用离心压缩机,由于材料、制造工艺、振动强度计算、轴承润滑技术和特别是高速动平衡技术的发展,工作转速较好高的已达到25000r/min左右,一般的也达到10000-15000r/min。 对于高速水下推进器转子,为了提高安全可靠性,总是设计成整锻式的,也就是叶轮与轴是整体的。冲动式汽轮机的整锻转子,叶轮还是存在,只是水下推进器与轴是一体的。 水下推进器使用过程中不论冲动式或者反动式汽轮机转子,其主要零部件转子轴本体外,尚有叶片和联轴器,一有危急保安器等。其中叶片数量甚多,例如反动式汽轮机转子的叶片,较好多可达3000只左右。 水下推进器在离心压缩机转子的结构,相对于工业汽轮机转子有较大推进差别。由于水下推进器中的离心压缩机的叶轮结构比较复杂,与轴整体加工十分困难,所以至今离心压缩机转子始终是装配式的,但是叶轮的轮体与轮盖的接合已由接改为焊接。水下推进器中的离心压缩机是从叶轮中部进气的,这样转轴的直径就受到进气口的限制,所以离心压缩机转子一来都是柔度较大。 实践表明,不论工业水下推进器转子,或是水下推进器离心压缩机转子,它们运行平衡性与转子的动平衡品质有密切关系。所以近代在汽轮机与压缩机转子的商品验收中,都把转子运平衡品质列入主要验收项目之中。相应地,国也不少转动平衡品质评定标准,如较好早出现的西德VDI2060和日本JISB0905标准等。 国际标准化组织也不少有关标准,如ISO1925,ISO1940,ISO5406和ISO5343。另外,国际商业上在水下推进器通用的工业汽轮机标准API611与API612以及离心压缩机标准API617中也都有转子动平衡品质的验收条款。正因为如此,近年来动平衡技术也大大地发展了,成为转子动力学中重要的学科。
浅析形状记忆合金
成绩____ 浅谈形状记忆合金 材料化学专业 2013级蒋文娟 指导教师肖凤 摘要: 形状记忆合金又叫记忆金属,是一种在加热升温后能完全消除其在较低的温度下发生的形变,恢复其形变原始形狀的合金材料。这种合金在高温(奥氏体状态)下发生的“伪弹性”行为,表现为这种合金能承载比一般金属大几倍甚至几十倍的可恢复应变。形状记忆合金的这些独特性质源于其内部发生的一种独特的固态相变——热弹性马氏相变体。 关键词:形状记忆合金;马氏相变体;记忆效应 Key words:shape memory alloy;Martensitic transformation;memory effect 形状记忆合金材料兼有传感和驱动的双重功能,是一种智能结构中技术成熟性很高的功能材料,可以实现机械结构的微型化和智能化。形状记忆效应(SME)即某种材料在高温定形后,冷却到低温(或室温),并施加变形,使它存在残余变形。当温加热超过材料的相变点,残余变形即可消失,恢复到高温时的固有形状,如同记住了高温下的状态。SMA及其驱动控制系统具有许多的优点,如高功率重量比,适于微型化;集传感、控制、换能、致动于一身,结构简单,易于控制;对环境适应能力强,不受温度以外的其他因素影响等,有着传统驱动器不可比拟的性能优点。形状记忆合金由于具有许多优异的性能,因而广泛应用于航空航天、机械电子、生物医疗、桥梁建筑、汽车工业及日常生活等多个领域。 1发展史 1932年,瑞典人奥兰德在金镉合金中首次观察到"记忆"效应,即合金的形状被改变之后,一旦加热到一定的跃变温度时,它又可以魔术般地变回到原来的形状,人们把具有这种特殊功能的合金称为形状记忆合金。记忆合金的开发迄今不过20余年,但由于其在各领域的特效应用,正广为世人所瞩目,被誉为"神奇的功能材料"。 最早关于形状记忆效应的报道是由Chang及Read等人在1952年作出的。他
形状记忆合金
形状记忆合金性能及其应用综述 引言:形状记忆合金形状记忆效应、超弹性效应、高阻尼特性、电阻突变效应 以及弹性模量随温度变化等一般金属不具备的力学特性,使其在仪器仪表、自动控制、机器人、机械制造、汽车、航天航空、生物医学等工程领域都能发挥重要的作用,对其本构性能和在工程应用中的性能的研究十分必要。本文综合了自1971年以来国内外众多科学家对形状记忆合金做出的各方面的研究,并做出简要评价,提出自己的看法和本课题研究内容,为对形状记忆合金的应用研究提供一定参考。 国内外研究现状: 1、SMA材料种类研究现状 自上个世纪30年代人们发现Au-Cd合金具有记忆效应以来,进过几十年的研究,发现的形状记忆合金按相变特征类,可分成如下几个系列[1]: 1、由热弹性马氏体相变呈现形状记忆效应的合金 1) TiNi系列,发生体心立方——无公度相——菱方R相——单斜BI9相变。包括TiNi、TiNiFe、TiNiCu、TiNiNb(宽滞后)、TiNiCo等。 2) β铜基合金系,包括:Cu-Al-Ni(Cu-Al-X=Ti或Mn),发生体心立方—近正交γ1’(2H)或单斜β1’(18R1), γ1’—单斜β1”(18R2),β1”--单斜α1, β1’--单斜α1相变(视应力大小而定);Cu-Zn-Al-X(Cu-Zn-Al-X,X=Mn或Ni等),发生体心立方(β2、DO3或Lα1)--单斜9R或18R相变;其它,如Cu-Zu和Cu-Zn-X (X=Si、Sn、Au等)。 3)其它有色合金系,包括:Au-Cd、Ag-Cd、In-Ti、Ti-Nb、Co-Ni、Ni-Al等。 4) Fe3Pt(γ—α’,γ—fct)和Fe-30at%Pd(γ—fct)。 5) Fe-Ni-Co-Ti系,发生时效γ一薄片状α’(bcc和bct)马氏体相变,如Fe-33Ni-l0Co-4Ti、Fe-31Ni一I0Co-3Ti及Fe-33Ni-l0Co-(3~4)Ti-Al等。 2、由非热弹性马氏体相变呈现形状记忆效应的合金 1) Fe-MIn-Si系,发生γ一六方ε相变,包括Fe-30Mn-1Si(单晶)、Fe-(28~33)Mn-(4~6)Si、Fe-Mn-Si-Ni-Cr、Fe-14Mn-6Si-5Ni-9Cr、Fe-20Mn-5Si-5Ni-8Cr、Fe-Mn-Si-9C、Fe-8Mn-6Si-6Ni-13Cr- 12Co等。 2) Fe-Ni-C系,发生γ一薄片状α’马氏体相变,如Fe-3INi-0.4C 和Fe-(26~28)Ni-12Co-4Al-0.4C。 其中Ni-Ti基合金的形状记忆效应最佳,是重要的形状记忆材料。Ni—Ti中具有多种相变:无公度相变、R相变(马氏体型)、马氏体相变、沉淀。 2形状记忆合金性能研究现状 虽然早在上个世纪30年代,人们就发现了一些合金的形状记忆效应,但是直到70年代muller等人提出SMA材料的本构关系模型以来,有关形状记忆合金的机理和本构模型的研究才取得了一定的进展[2]。SMA的模型可大致分为三类:微观热力学模型、宏观现象学模型和基于微观力学的宏观模型。 微观热力学模型有助于了解材料宏观特性的微观机理,揭示SMA的物理本质。微观热力学模型主要有从相界运动的动力学角度给出的本构模型和以能量耗散理论为依据的细观力学模型。Patoor[3]等人首先从微观角度研究了SMA的本构