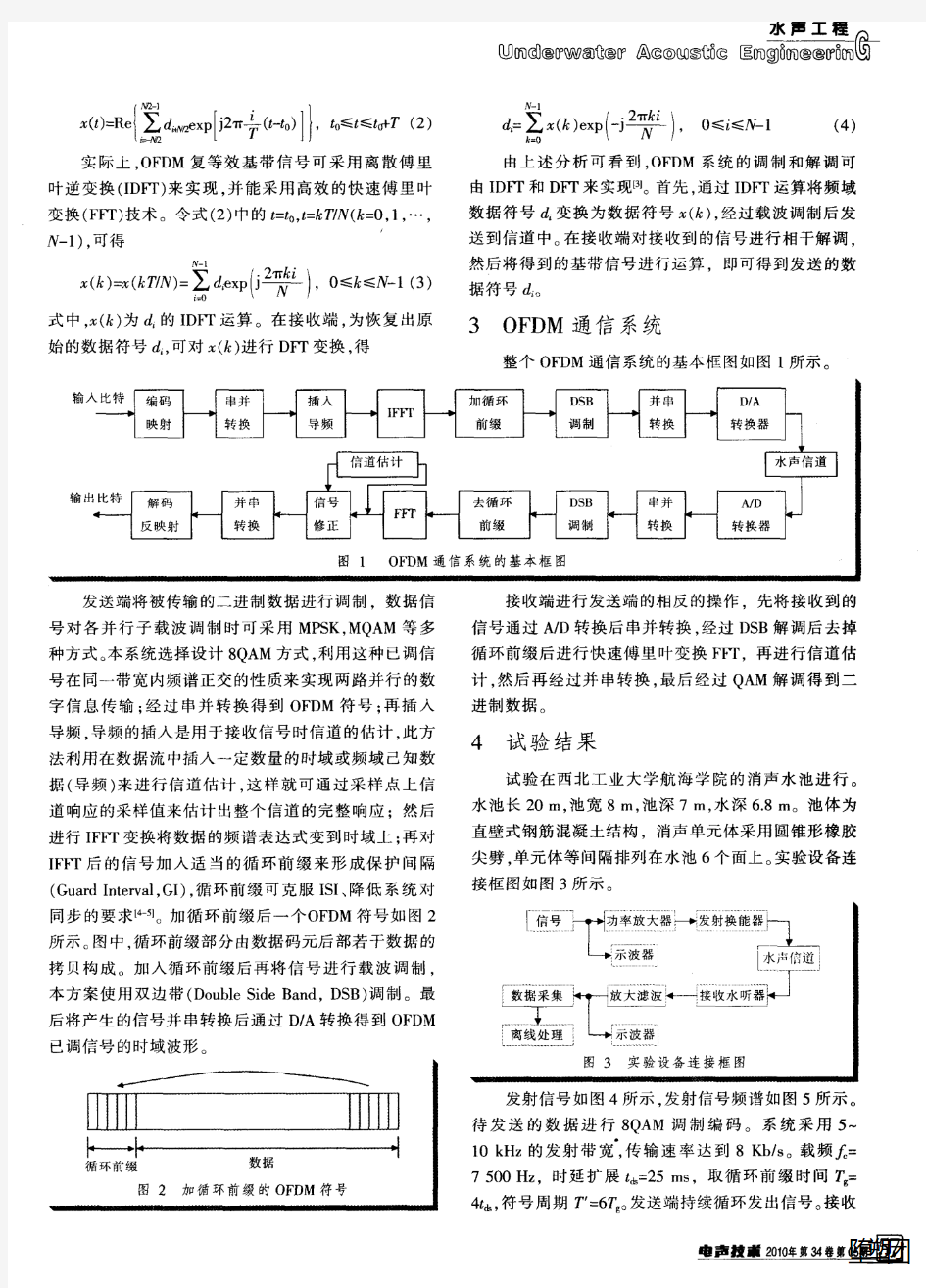
OFDM水声通信的水池试验验证

水声通信系统中的信道编码技术研究
水声通信系统中的信道编码技术研究 信道编码定理为人们探索信道的最佳编码方案提供了理论依据,但并没有指明如何获得好码。目前,出现了多种信道编码方案,如RS 码、卷积码、级联码等。本文简要介绍了RS 码和卷积码的基本原理,并进行了相应的计算机仿真,并给出了加入了RS 码和卷积码水声通信系统的水池实验数据,结果表明利用信道编码技术能够提高水声通信系统的误码性能。 (一)Reed -Solomon 码 1960 年I.S Reed 和G .Solomond 提出RS 码,又称Reed -Solomon 码,RS 码是一类纠错能力很强的多进制BCH 码。 RS 码是在GF(q)上长度为N=q-1的本原BCH 码。冗余根据可纠正错误确定,通常等于2t 个字符。这样,编码具有k=q-2t-1个信息字符。这种码具有N 个信息字符,可纠正t 个错误。长度为N ,设计距离为=q-k δ的RS 码的生成多项式为: )())()(()(1321-----=δααααx x x x x g (1) 本论文系统中实现的编码器按图1工作。开始编码前,向A0~A13或A0~A11单元写入信息字符(分别对应1个或2个可纠错码)。P0~P15单元记载类构造器算出的校验多项式的系数值。然后校验多项式系数和信息字相乘并相加,如图所示。运算的结果得出校验字符,存入A0(此时,信息字符向左移位)。生成过程继续,直到A15出现信息字高位元素。这样,在编码中,为纠正1个错误,必须进行2次迭代;为纠正2个错误,必须进行4次。 ∑ 图1 RS 码编码器的结构 纠错码的译码问题,一直是编码理论中最感兴趣的课题之一。RS 在短和中的码长下,具有很好的纠错性能,构造容易,故得到广泛应用。 RS 的译码基本上分为3步:第一步是由接收到的R(x)计算出伴随式;第2步由伴随式找出错误图样E(x);第3步由R(x)- E(x)得到可能发送的码字C(x)。 记q(x)为信息多项式,则发送码字C(x)=q(x)g(x),接收到的码字:
外文翻译模板
最佳分簇规模的水声传感器网络 Liang Zhao,Qilian Liang 德州大学阿灵顿分校电子工程系 Arlington, TX 76010, USA Email: https://www.360docs.net/doc/cc3590347.html,, https://www.360docs.net/doc/cc3590347.html, 摘要:在这篇论文中,我们主要关注的是的最优化分簇规模对水声传感器网络的影响。由于稀疏部署和信道属性的水声传感器网络是不同于地面传感器。我们的分析表明,最优分簇规模主要工作频率所决定的声音的传播。此外,区域数据聚合中也起着因素在很大程度上决定最佳分簇规模。 1引言 水下传感器网络(UW-ASN)可看成是个自组织网络,组成的传感器与一个声音进行分配感应的任务。为了达到这个目的,传感器必须自组织成一个独立的可以适应水下环境的网络,。UW-ASNs可以沿用许多通讯技术传统自组织网络和陆地的无线传感器网络,但仍有一些重要的区别为有限的能量和带宽约[1],[5],此协议对传统发展无线自组网路并不一定适合绝无仅有的网络的特点。当一个无线传感器可能要在一个微小的电池持续比较长的时间,能源效率就成为一个大问题。 由于广播的性质和有限的带宽,在浅水通信[6] [7],多跳可以引起传感器节点之间严重干扰。一个新的路由称为“矢量为基础的转移” (VBF)缓解了这个问题 [8]。 VBF本质上是一种基于位置的路由选择方法:节点紧邻“矢量”转发源宿信息。 通过这种方式,只有一小部分的节点参与路由。另一种解决办法是,每一个传感器分簇通信应该直接指向簇头和内部分簇通信应协调由簇头,以最大限度地提高带宽利用率以往的研究水下通信经常使用时间计划调度方法[9],[10],这可能是适合的小型网络简单。然而,扁平架构还可能限制网络的规模。特别是由于传播延迟声汇简单的时间调度算法方案并不适合较大的水下网络[11]。在文献[11]中,Salva-Garau 和 Stojanovic建议聚类水声载体网络的方案,这组相邻载体进入分簇,和使用的TDMA(时分多址)内每个群集。在分簇管理的干扰是分配到相邻的簇不同的扩频码,同时可扩展性是通过在空间复用码。网络运行开始初始化阶段,并移动到不断维修期间而流动性管理。他们还利用仿真分析,以获得最佳簇大小和传输功率为一种具有一定的载体密度网络。[12]提出了平台,同时使用光学和声汇水下通信。虽然光通信可以达到更高的数据速率,它的应用仅限于短距离点至点通信。该平台也使得移动使用data muling,,这对于大批量的理想延迟容许的应用程序。
FSK水声通信系统仿真
水声通信FSK调制系统性能仿真 钟方盛石亦敏张杰峰 一.仿真要求 仿真一下单发单收、FSK调制下得水下通信系统性能。 中心频率有两个:21~27KHz,带宽6KHz;55~65KHz,带宽10KHz; 信道:AWGN及单径Rayleigh衰落; 通信距离1Km、8Km; 通信速率:未定(通过仿真确定); 给出BER vsSNR 得曲线; 其她可以认为就是理想得; 二.带宽、码元速率与频率间隔分析 带宽;波特率;一共有个频率点,相邻频率间隔。 1、基带信号带宽与波特率 , 其中就是比特率,为滚降因子。取=1,则基带系统所需带宽 2、带宽与波特率、频率间隔 3、频率点设置 频段为,其中为最小频率,为最大频率,则中心频率为,带宽为。 设波特率为,那么相邻频率间隔为。 因此,可以设计频率点得值为 。 三.信道建模与最佳接收 1、信道建模 对于MFSK,经过单径Rayleigh衰落及AWGN噪声,可以将信号建模成 ,
其中服从参数为得瑞利分布,服从得均匀分布,高斯噪声,就是MFSK调制中得频点。 由于若X、Y相互独立且都服从,那么服从参数为得瑞利分布。因此,可以根据这个来设计瑞利分布。 2、最佳接收 经过理论推导,可以得到检测统计量,,对于都成立,则判为。 而这等价于都成立,这判为,其中 四.不同瑞利分布参数与速率下得BER-SNR仿真曲线 注: (1)以下曲线中,X坐标为SNR(dB),Y坐标为BER(误比特率,对数坐标);不同颜色代表不同有效比特速率,即经过1/2卷积码信道编码。 (2)在比特速率与SNR确定时,瑞利分布参数对BER有很大影响,越小信道越优良,误比特B ER越小。因此为了折衷考虑,选择=0、5来进行仿真。 1、中心频率21~27KHz,带宽6KHz (1)2FSK,瑞利分布参数=0、5, 有效比特率为0、4、0、6、0、8、1、0、1、2kbps (2)4FSK,瑞利分布参数=0、5, 有效比特率为0、8、1、2、1、6、2、0、2、4kbps
水下传感器网络通信问题的思考
水下传感器网络通信问题的思考 目前对于水下传感器的研究已经成为逐渐成为新的讨论热点,在本文中我们首先会对水下传感器的基本概念进行介绍,并对其主要的特点展开研究。同时对于水下传感器网络通信技术我们会进行相关的介绍。 一、引言 水下传感器网络指的是将能耗很低、具有较短通信距离的水下传感器节点部署到指定海域中,利用节点的自组织能力自动建立起网络。我们说水下传感器网络如今的发展是备受关注的,在国际上它是处在前沿领域的,其发展的前景是很广阔的,在多个方面它都具有很大的研究价值。例如说在军事等方面。近年来关于水下传感器网络的研究得到了迅猛的发展,其组成是有多个节点构成的,那么接下来我们会对如何进行有效的推进水下传感器的通信问题进行进一步的探究。传感器网络是目前产生的巨大的影响力的技术之一。我们对于传感器网络的使用,提高了接收信号的提高了接收信号的信噪比,那么对于提高水下传感器通信系统的检测性能我们有以下的几点想法,首先是节点中的多种传感器的混合应用对于搜集信息方面要更加全面周到的反映出其明显特征。其次对于水下传感器的跟踪定位功能我们也进行了一些相关的研究。 二、水下传感器网络通信技术 水下通信方式主要有长波通信、水声通信、水下激光通信,中微子通信等。长波通信所需要设备体积大价格贵而且效率低,目前主要用于基地和潜艇之间的远程通信;而水下激光通信目前主要研究蓝绿激光水下通信系统,其穿透力强,可实现与水下400m以上的潜艇通信,通信频带宽,数据传输能力强,方向性好,不足的是里活性不够,难以用于水下传感器网络,中微子通信时最近新兴的技术,较为复杂,目前尚停留在实验室阶段。 因为声波时唯一一种能在水介质中进行长距离传输的能量形式,因此对于水下传感网络而言,水声通信时目前最合适的通信方式,得带各发达国家和军方的高地重视,它的发展甚至影响到海军军事战略的变革。由于水下传感网络技术的发展,未来海战可充分发挥近海空间优势。 2006奶奶国家自然科学基金将水下移动传感器网络的关键技术列为重点研究方向,中国科学技术大学、沈阳自动化研究所、中科院计算所等多家高校和研究单位均已开展了无限传感器网络相关领域的研究。随着水下无线传感器网络技
水声通讯系统调研
0 引言 通信技术的发展主要集中在空间通信上。近年来,由于军事和海洋开发的要求,人们开始越来越重视水下通信系统的研究与开发。由于电磁波在水中传播时衰减严重,而声波是人类迄今为止已知的唯一能在水中远距离传播的能量形式,所以海洋中检测、通信、定位和导航主要利用声波。声波是目前水中信息传输的主要载体。因此,人们对水下通信的研究主要集中在对水声通信的研究之上。 水声通信是当前唯一可在水下进行远程信息传输的通信形式,由于其在民用和军事上都有重大意义,水声通信一直被人们所重视。文章介绍了水声通信的特点、系统组成、发展历史和国内外的发展现状。 1 水声通信的历史 水声通信的历史可以追溯到1914 年,在这一年水声电报系统研制成功可以看作是水下无线通信的雏形。世界上第一个具有实际意义的水声通信系统是美国海军水声实验室于1945 年研制的水下电话,该系统使用单边带调制技术,载波频率8.33 kHz,主要用于潜艇之间的通信。早期的水声通信多使用模拟频率调制技术。如在50 年代末研制的调频水声通信系统,使用20kHz 的载波和500Hz 的带宽,实现了水底到水面船只的通信。模拟调制系统不能减轻由于水声信道的衰落所引起的畸变,限制了系统性能的提高。 70 年代以来随着电子技术和信息科学突飞猛进的发展,水声通信技术也因此得到了迅速的发展,新一代的水声通信系统也开始采用数字调制技术。采用数字技术的重要性在于,首先,它可以利用纠错编码技术来提高数据传输的可靠性;其次,它能够对在时域(多途)和频域(多普勒扩展)上的信道畸变进行各种补偿。随着处理器技术的提高,各种采用快速解调的算法也随之发展起来。数字调制技术的主流为幅移键控(ASK)、频移键控(FSK)和相移键控调制(PSK)。 随着用于空间无线电衰落信道技术的发展,水声通信的下一代系统对数字编码的数据采用了频移键控(FSK)调制方式。作为一种能量检测(非相干)而不是相位检测(相干)算法,FSK 系统被认为对于信道的时间和频率扩展具有固有的稳健特性。采用数字技术有两个方面的好处:首先,它允许采用纠错编码技术来提高传输的可靠性;第二,它允许对信道混响做一定的补偿,包括时间和频率上的补
水声通信
水声通信 水声通信是一项在水下收发信息的技术。它的工作原理是首先将文字、语音、图像等信息经过编码、调制处理后,由功率放大器推动声学换能器将电信号转换为声信号。声信号通过水这一介质,将信息传递到远方的接收换能器,这时声信号又转换为电信号,经过放大、滤波和数字化后,数字信号处理器对信号进行自适应均衡、纠错等处理,还原成声音、文字及图片。 特点: 声波通信是水下远程无线信息传输的唯一有效和成熟的手段。声波是水中信息的主要载体,广泛应用于水下通信、传感、探测、导航、定位等领域。声波属于机械波(纵波),在水下传输的信号衰减小(其衰减率为电磁波的千分之一),传输距离远,使用范围可从几百米延伸至几十公里,适用于温度稳定的深水通信。 水介质与空气介质的特性不同,水声信道与空气中的无线电信道具有许多明显的差异。水下声信道是时间散布快速衰落信道,具有多普勒不稳定性。水声通信的衰耗因素较多,特别是在海水中传播,声传播损失不仅与频率有关,而且还受海水的盐度、温度、密度、深度以及传播距离等因素的影响,造成中远程水声信道带宽极其有限。水中的声速计算公式可见下式: c=1449.2+4.6T-0.055T2+(1.34-0.010T)(S-35)+0.016D 其中:r是海水温度,s是盐度,D是深度。海水中不均匀分布的声速剖面造成声线的弯曲,而声波的界面反射和随机散射又引起声波接收信号的多途效应。在实现高速通信时,有限的信道带宽和信号的多途传输会引起严重的码间干扰,造成接收数据的严重误码。同一声源发出的声波,在不同的海区或不同的季节,传播情况可能都不同。从信道中的各种限制因素到时变、空变性,水声信道都远比无线电信道复杂。 举例: (一)我国厦门大学以许克平教授为首的这个课题组出色地完成了国家交给他们的863项目,已经成功解决了在10公里之内水下信号相互清晰的传递,他们这个系统已达到实用要求。他们认真分析了世界上抗多途干扰的几种方法,最后课题组一致认为还是采用电磁波抗干扰的手段——跳频通信,它既能抗多途径干扰又能保证信息安全。 如果电磁波的跳频技术用在海中,频率资源充足的情况下传输一组信号,频率相差大时,电路内部做处理的时候,就用两个不同频率表示1和0,相当于颜色相差大,如:赤、橙、黄、绿、青、蓝、紫这一组信号代表一个文字,碰到干扰后虽然到达的时间不一致,但由于颜色区别大也就是频率相差大接收方就容易辨认了,这样就解决了信号干扰问题。经过攻关他们研制出一个全新的跳频技术,终于成功解决了多途径干扰问题。因为语音传输是水声通信最难攻克的瓶颈问题,要求精确度极高,难度也最大,语音传输成功的实现,使这个项目完全成功了,他们做到了。 (二)水声通信是当前海洋军事中最重要和关键的技术,该研究方向发挥厦门大学电子与海洋等相关学科专业的优势和特色,课题组完成了“水下图像水声传输实用样机研制”、“视频图像水下传输试验研究”等国家“863”相关课题项目, “水下图像传输系统”项目通过国家“863”专家组验收。该系统能在浅海域实现全方向无缆图象信息传输,每8秒传送一帧(160*100象素,十六级灰度),距离10公里。99年中国国际高新技术成果交易会
美国水下信息系统发展现状分析
美国水下信息系统发展现状分析 文章介绍了美国水下信息网络的发展现状,简要阐述了网络组成、分布等特点,分析了美国水下信息网络的发展趋势,对比指出了当前我国水下信息网络发展存在的差距。 标签:水下信息网络;目标探测;侦察;监视 Abstract:This paper introduces the development status of underwater information network in the United States,briefly expounds the characteristics of network composition and distribution,analyzes the development trend of underwater information network in the United States,and finally points out the existing gaps in the development of underwater information network in China. Keywords:underwater information network;target detection;reconnaissance;surveillance 1 概述 未來战争将是向太空和海洋迅速延伸的立体战争,水下位势决定了水上位势,潜得越深,自身的生存能力越强,信息覆盖范围越广。世界各军事大国和濒海发达国家正在积极从事深海战场开发,海洋空间将成为未来冲突与战争的主要场所。各国正投入较多的人力、物力和财力,加强水下信息网络的建设,加紧对潜艇、鱼雷和无人潜航器等水下目标的侦察监视,以求尽快掌握“制深海战场权”。 2 美国水下信息系统发展现状 美国是最早提出水下网络应用概念的国家,其研究成果处于世界领先水平。在上个世纪九十年代之前,美军开展了大量水下网络应用研究与试验,水下信息网络理论逐渐成熟,先后试验成功的水下信息网络功能日益完备,性能更加先进,已经具备实际作战能力,整体能力世界领先,具有代表性的有: 2.1 岸基声纳监视系统(SOSUS) 上世纪70年代初,美国在大西洋和太平洋部署SOSUS远程固定水声监视系统,借助于铺设在海洋底部的水听器网络发现和确定潜在敌人的导弹核潜艇的位置,查明洋区和反潜区的水下情况,为舰队提供目标信息并引导舰队进行机动反潜。位于美国东、西海岸的反潜中心在收到水听器的数据后,经过分析、处理上报司令部,最后由作战舰队情报中心向前沿地区分发。SOSUS系统在大西洋、太平洋部署了多个岸基站,如图1所示,其中大部分处于值守状态,随时准备投入使用和接收情报。 1996年美国及其盟国重启一岛链SOSUS系统,并针对我潜艇改建和扩建原
定向传输水声通信网络邻节点发现机制
第40卷第9期2019年9月 Vol.40<9 Sep;。】#哈尔滨工程大学学报 Journal of Harbin Engineering University 定向传输水声通信网络邻节点发现机制 杨健敏%'2'3,乔钢2,刘凇佐2,尹艳玲4 (1.中山大学海洋工程与技术学院,广东广州518000;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;3.南方海洋科学与工程广东省实验室(珠海),广东珠海519000;4.东北农业大学电气与信息学院,黑龙江哈尔滨150001) 摘要:针对水声通信网络拓扑不稳定的问题,本文对其邻节点发现机制进行了研究。邻节点发现机制将网络新增节点的邻节点分为全向传输范围内邻节点与定向传输范围内邻节点2类,全向传输范围内邻节点按照邻节点发现机制选取部分节点作为邻节点代表,选出的邻节点代表根据自身情况向新增节点发送邻节点信息完成邻节点发现过程。本文通过理论计算与仿真分析验证所提邻节点发现机制性能,所得理论结果与仿真结果一致,仿真结果还表明所提邻节点发现机制中参与邻节点发现过程的节点数小于全向传输范围内节点数。 关键词:水声通信网络;邻节点发现;定向传输;邻节点代表;信息冗余;全向传输;网络拓扑;传输范围 DOI:10.11990/jheu.201803070 网络出版地址:htt p://https://www.360docs.net/doc/cc3590347.html,/kcms/detail/23.1390;.20190816.1005.002.html 中图分类号:TP393文献标志码:A文章编号:1006-7043(2019)09-1549-06 Neighbor discovery mechanism for directional transmission underwater acoustic communication networks YANG Jianmin1,2,QIAO Gang1,2,LIU Songzuo1,2,YIN Yanling3 (1.School of Marine Engineering and Technology,Sun Yat-sen University,Guangzhou518000,China; 2.Col/ge of Underwater Acous/a Engineering,Harbin Engineering University,Harbin150001,China;3.Marine Science and Engineering Guangdong Laborato-ry(Zhuhai),Zhuhai519000,China;4.Colleee of Electrical and Information Engineering,Northeast Agricultural University,Harbin 150001,China) Abstract:Consideeng the unstable topology of directional undewvatcs communication network/,thit papei studies iit neighbor discovei mechanism.In this mechanism,the node has two types of data transmission methods:directional and omnidirectional.The neighbor discavew mechanism divides the neighbor nodes of the newly added nodes inty two cateeo-W cs:the neighbor nodes i the omnidirectional transmission range and the neighbor nodes i the directional transmission range.The neighbor nodes in yie omnidirectional transmivion range select some nodes as yie neighbor nodes according W the neighbor node discovea mechanism.The selected neighbor node representative then sends the neighbor node infownas tion to the naWy added node according to its own situation to complete the neighbor node discovea process.In this pa-pea,the peWbwnanco of the proposed neighboring nodes is yerifOd by theoreticat calculation and simulation analysis.The theoreticat results are in good agreement with the simulation results.The simulation results alss show that the number of nodes paticipating i the neighbor discovery peocess is less than the omnidmectionat transmission sange.The number of nodes.The maig Onding of this paper have an impoWant referenco value and guidanco function to undewvates acoustic communication networks. Keywords:undewvates acoustic communication networks;neighbor discoyay;directional transmission;representa-tive nodes;infownation adundancy;omni-direction!transmission;network Wpology;transmission rang 近年来,随着陆上资源开采几近枯竭,对海洋的开发利用越来越受关注。作为水下最有效的通信方 收稿日期:2018-03-20.网络出版日期:2019-08-16.基金项目:国家自然科学基金项目(61431004,61601136,61601137, 11774074). 作者简介:杨健敏,男,博士; 乔钢,男,教授,博士生导师; 刘淞佐,男,副教授,博士生导师. 通信作者:刘淞佐,E-mail:liusongzuo@https://www.360docs.net/doc/cc3590347.html,. cn.式,学者对水声通信技术开展了广泛且深入的研究[1-6]&随着对海洋开发探索逐渐深入,点对点水声通信无法满足一些水下应用场景,需要水下各单位组网通信。水声通信网络中,邻节点发现机制扮演着非常重要的角色'7-9],该机制性能优劣会极大 影响网络整体工作效率。目前,水声通信网络邻节点发现机制相关研究非常少,但陆上无线网络关于邻节点发现的研究已经相对丰富且成熟'10_16]&
水声通信的信号处理实现
水声通信的信号处理实现 1.工作参数: 采样率:80ksps; FFT点数:2048; FFT输入精度:18比特; FFT输出精度:18比特,加6位精度控制; 输出波束为-60:8:60度,共16个波束; 波束上加30dB的切比雪夫窗用于抑制波束泄漏; 频域积分:500Hz~20kHz输出32或者64个频域区间,频域积分区间可通过软件控制; 时间积分:1、2、4、8个周期平均,可以通过软件控制。 因此:每次上传的数据为2边,每边16个波束,每个波束32个频率区间的时间平均。因此每一次上传采用一个数据包实现。 2.重要组成部分和实现: 水声通信信号的主要包括以下3个部分: 32个通道的2048点FFT处理; 32个通道的FFT由一个FFT的IP核实现,输入为实部为信号,虚部为0,输入是18位定点。输出的实部和虚部为18位,再加一个6比特的精度控制信息,表示数据低位舍去了多少位。 上面是2048FFT IP的实现的一些参数。它完成一次FFT的时间为3096个时钟周期。下面计算一下处理的时间,按照时钟周期计算。处理时钟为40MHz,2048点数据的采样时间为25.6毫秒,因此一个处理的时钟周期为1024000个时钟周期,由于通道数为32个通道,所以平均每个通道的时钟周期为32000个,远大于实际所需的时钟周期。因此采用一个FFT
模块就可以实现。 ●频域波束形成; 波束形成完成16个波束的频域乘累加运算。该运算的运算量为2个16个通道16个波束的运算。每个波束要16次的复数运算,一次波束共1024点。因此一次波束形成需要2×16×16×1024次复数乘累加运算。 该运算,频域的补偿值预先存储在ROM中,在运算的过程中调用。 ●波束域的频域积分、时间积分; 频域积分在频域波束形成输出时同时完成,完成后的波束积分放在缓存中,用于时间积分时。积分区间考虑做一个表,可以通过外部指令输入,也可以用内部的预先存储的值。 时间积分在频域积分的同时进行,它会把前几个周期的频域积分调出来进行积分运算。 3.系统实现的难点: 目前利用现有平台上实现信号处理的主要问题是RAM资源不足。目前硬件平台上FPGA内部有200KB的缓存和1MB的外部缓存。由于实现频域波束形成,32个通道同时操作,因此把中间数据放在外部缓存,调用时不方便。而内部资源比较有限,只有尽量减少中间结果的存储。 4.其他: 关于原始数据存储,由于该项目时间进度比较紧,建议采用目前的测试软件进行数据存储。目前的测试软件经过测试,不存在着数据丢包的问题。建议采用该软件在工业计算机上进行数据存储。 关于测向等后续算法,暂时还没有考虑。等把波束形成的算法完成后再把这部分功能加上去。
水声通信网络浅析
水声通信网络浅析 摘要:随着现代信息技术的飞速发展,覆盖了地面、空中、太空、水面的立体信息网已经形成并为各国的通讯、交通、资源调查、国防等各项业务服务。近年来,随着世界各国海洋开发步伐的加快,发达国家开始对水下声通信网进行研究。水声通信网络(UWN)承担着探测、数据通信的重要使命。它通常由海底传感器、自主式水下运载器(AUV)和水面站组成,水面站可进一步与Internet等主干网连接,在这种环境中人们可以从多个水下远程设备提取实时数据,并把控制信息传递给各个设备。本文将介绍水声通信网络的发展现状、关键技术、具体应用及发展前景。 关键词:水声通信网络发展现状 AUV 1.发展现状 目前陆上与空中的有线及无线通信已经很成熟,但是水下无线通信仍处于研究与试用阶段。随着人类对海洋探索、开发的不断深入,无论是军用领域还是民用领域,都对水下通信有着极大的需求。 尽管在水下可以使用电缆、光缆等有线方式进行通信,但是这些方式中节点无法移动,适用对象极其有限。电磁波在水下的衰减很大,要想在水中传播很远的距离就必须采用很低的频率,这就要求很高的传输能量和很长的天线,通常是难以实现的。目前水下通信方式主要有长波通信、水下激光通信、中微子通信、水声通信等。长波通信所需设备体积庞大,价格昂贵,通信效率低,目前主要用于基地与潜艇之间的远程通信;水下激光通信目前主要研究蓝绿激光水下通信系统,其穿透海水能力强,可实现基地与下潜400米以上的潜艇的通信,通信频带宽,数据传输能力强,但是灵活性不够;中微子通信是近年来新兴的技术,比较复杂,目前还仅仅停留在实验室阶段[2]。声波是惟一一种能在水介质中进行长距离传输的能量形式。水声通信是目前水下最合适的通信方式,得到了各发达国家研究机构和军方的高度重视。最早的水声通信可以追溯到20世纪50年代针对模拟数据的幅度调制(AM)和单边带(SSB)水下电话。随着VLSI(very large scale intergration,超大规模集成电路)技术的发展,在80年代早期水下数字频移键控(FSK)技术得到应用,它对信道的时间、频率扩散有一定的鲁棒性。80年代后期出现了水声相干通信,与非相干通信相比,水声相干通信技术可以提高有限带宽水声信道的带宽效率,但是由于水声信道的传播特性恶劣,水声相干通信刚开始并不被接受。90年代DSP(digital signal processing,数字信号处理)芯片技术和数字通信理论的发展使许多复杂信道均衡技术均可以实现,带动了水声相干通信技术的发展,并促使其开始转向对水平信道通信的研究。水下通信发展的一个里程碑式的关键环节是水下声学调制解调器的出现。最早的水下声学网络应用概念是1993年美国提出的自主海洋采样网(AOSN)。美国自1998 年起开始了称为“海网(SeaWeb)”的年度实验,意在验证水下声学网络的概念与实际使用效果。 2. 水声通信网络的特点与拓扑 水声通信网络的节点有以下几个特点:第一,移动性,因此必须是能够自组织的自主网络,遵循一定的网络路由方式;第二,由于采用水下无线通信方式,因此必须能够自适应海洋环境特性,能够解决物理层的技术挑战;第三,由于采用电池供电,所以能量受到限制;第四,具有数据传播功能,可把监测数据传达到岸上。 参照陆上无线传感器网络,水声通信网络的拓扑可分为两大类: 中心化的网络(centralized network)和分布式的对等网络(distributed peer-to-peer network)。 在中心化网络中,节点之间的通信是经过中心节点实现的,并且网络通过这个中心节点接入骨干网。这种配置的主要缺点就是存在单一故障点,即这个节点的失效将导致整个网络的失效。同时由于单个调制解调器的作用距离有限,整个网络的覆盖范围也就有限。
水声通信技术
水声通信技术 水声通信是海洋中无线信息传输的主要技术手段。水声通信技术在海洋环境监测、水下航行器/载人潜水器作业等方面有着广泛应用。水声通信及网络可灵活地用于不同的速率载荷、覆盖距离、水体深度、网络结构的情景,可广泛地应用于海洋环境观测,实现水下不同空间位置多个观测设备之间的信息交互。同时,水声信道传输状态多变、海洋作业环境恶劣,对通信算法和设备可靠性有较高要求,水声通信及组网成为目前的研究热点。水声通信网络在国外已有20a发展历史,开展较早且具有代表性的是美国的Seaweb网络。美国的Seaweb网络经过多年的试验,实现了多固定节点的组网、自适应节点路由初始化、潜艇和AUV的数据接入、利用固定节点对AUV定位、分簇网络等多种功能,在基于卫星浮标的远海观测网、港口近岸的水下侦查网络及军用水下航行器指令传输及定位等应用中展示了很好的应用效果和技术先进性。欧洲也开展了试验研究。 近年来,在国家“863”计划、军方、国家自然科学基金等支持下,我国水声通信领域在通信算法、通信机研制、网络协议仿真、组网应用试验、协议规范制定等方面取得长足进步。本文主要介绍面向海洋环境监测的水声通信网技术,并对未来的技术趋势进行展望。
水声通信信道是复杂的信道,信道带宽窄、传播速度慢、时变性强、频率选择性衰落、噪声严重等不利因素在水声通信信道中都很明显。如何针对水声信道特点,采取高性能、可实现的通信算法,是水声通信领域的关键问题。物理层主要解决利用信道进行点对点的可靠通信的问题,物理层技术方案主要包括调制解调和纠错码两部分内容。对于水声通信中的调制解调技术,一般根据接收端是否恢复原始载波相位可划分为相干通信和非相干通信。
无人潜航器的概念、种类以及其应用解析
无人潜航器的概念、种类以及其应用解析 无人潜航器概述 无人潜航器即(UUV),也可称为无人潜器、无人水下航行器和无人水下运载器等。UUV 利用自身的各种传感器和武器,执行远程通信中继、反潜警戒、水下侦察与监视、反水雷等一系列重要军事支援任务。UUV作为一种海上力量倍增器,有着广泛而重要的军事用途,在未来海战中有不可替代的作用。随着UUV及相关技术的发展,UUV已经被用于执行扫雷、侦察、情报搜集及海洋探测等任务,在未来海战中还可作为水下武器平台、后勤支持平台等装备使用。UUV主要分为遥控式水下航行器(ROV)和自主式水下航行器(AUV)两类。ROV后面拖带电缆或光缆,由人员控制进行工作。AUV自带能源,采用自治控制方式,灵活方便,可广泛应用于侦察/监视、情报收集、跟踪、预警、通信中继、水下攻击等方面。 主要无人机潜航器型号 进入21世纪以来,世界上已有10多个国家的1000余艘各种用途的UUV投入到军用或民用领域。 美国无人机潜航器 美国军用UUV处于世界领先水平,美国于20世纪90年代就制定了发展UUV的科技计划,提出了近期水雷侦察系统(NMRS)和远期水雷侦察系统(LMRS)等研制计划,其中,NMRS于1998年就作为攻击型核潜艇的制式装备正式服役。2000年,美国海军提出了2030年之前UUV的发展规划。该规划明确了UUV在军事应用方面的7种使命(情报/监视/侦察(ISR)、反水雷措施(MCM)、气象学和海洋学、辅助通讯和导航、反潜战(ASW)、自治武器平台、后勤支援和补给)和4种作战能力(海上侦察能力、水下搜索和测量能力、辅助通讯/导航能力和潜艇跟踪及循迹功能),描绘了2030年之前UUV的发展蓝图。2004年,美国海军又公布了新的UUV发展规划,提出了9种使命,包括情报/监视/侦察(ISR)、反水雷措施、反潜战、观察与识别、海洋学、通讯和导航网络节点(CN3)、载荷输送、情报战和时敏目标打击(TCS)。