数字化无人机航空像片拼接技术研究
1引言
无人机航空像片以其分辨率高、收容面积大、定
位精度高等优点广泛应用于预先侦察和毁伤评估之中,由此使得无人机航空像片拼接显得尤为重要。从目前无人机部队航空像片拼接处理现状来看,主要采用光学像片的手工拼接方式,这种拼接方式不仅拼接精度低、成本高,而且处理周期长。在该背景下,探讨数字化航空像片拼接方法。本文研究了采用特征匹配算法实现无人机航空像片数字拼接的方法。
2
特征提取
2.1
点特征的提取
点特征主要指明显点,如角点、圆点等,如房屋的角点、道路交叉口等等。提取点特征的算法称为兴趣算子(Interest Operator )或有利算子,即运用某种算法从影像中提取我们所感兴趣的点。
2.2线特征的提取
线特征是指影像的“边缘”与“线”。“边缘”可定
义为影像局部区域特征不相同的那些区域间的分界线,而“线”则可以认为是具有很小宽度的,其中间区域具有相同影像特征的边缘对,也就是距离很小的一对边缘构成一条线。因此线特征提取算子通常也称边缘检测算子。边缘的剖面灰度曲线通常是一条刀刃曲线,由于噪声的影响,灰度曲线并不是平滑的。对这种边缘进行检测,通常是检测一阶导数(或
作者简介:顾强,男(1983—),甘肃天水人,硕士研究生,主要研究摄影测量与遥感及情报信息处理。
数字化无人机航空像片
拼接技术研究
顾
强,谈国军,程
超,李
金
(解放军炮兵学院,合肥
230031)
摘要:本文阐述了基于特征匹配的无人机航空像片拼接技术。从对影像匹配技术、拼接算法的深入研究,结合
影像特征提取方法,着重分析解决了拼接解算控制点精度和可靠识别问题。
关键词:无人机;特征提取;影像匹配;拼接算法;无缝拼接
中图分类号:P231
文献标识码:A
文章编号:1001-0270(2009)01-0042-04
A Study on the Digital Mosaic Technique of UAV Aerial Photographs
GU Qiang ,TAN Guo -jun ,CHENG Chao ,LI Jin (Hefei PLA Artillery College,Hefei 230031)
Abstract :This paper expatiates the technique of the UAV aerial photograph mosaic based on the feature matching.By the further study of the technique of the image matching and mosaic algorithm,combining with the method of image feature extraction,it mainly analyses the precision of the connection point and solves the problem of achieving the reliable recognition.
Key Words:UAV :feature extraction ;image matching ;mosaic algorithm ;seamless mosaic
收稿日期:2008-08-25修回日期:2008-09-25
4
拼接算法
4.1
场景平面参数模型
假设像机拍摄的场景是一个平面,有两种场景
平面参数模型。一种是场景平面垂直于光轴模型。即假设对于像机而言,场景平面垂直于光轴,图像对应
模型如下:
2.3面特征提取
影像中的目标,除了在边界表现出不连续之外,
在目标区域内部具有某种同一性,这种同一性表现为面特征,面特征的提取方法很多,由于面特征不是本文研究的重点,故在此不进行论述。
3影像匹配
影像匹配有时也被称为影像相关,影像匹配的
目的是从两幅影像中识别同名点,这一过程是一个摄影测量视觉的过程,也是一个计算机视觉的过程。
3.1影像匹配的基本原理
最初的影像匹配采用了相关技术,由于原始像片
中的灰度信息可转换为电子、光学或数字等不同形式的信号,因而可构成电子相关、光学相关或数字相关等不同的相关方式。但是,无论是电子相关、光学相关还是数字相关,其理论基础是相同的,即影像相关。
影像相关是利用两个信号的相关函数,评价它们的相似性以确定同名点。即首先取出以待定点为
中心的小区域中的图像信号,然后取出其在另一图像中相应区域的图像信号,计算两者的相关函数,以相关函数最大值对应的相应区域中心点为同名点,即以图像信号分布最相似的区域为同名区域。
3.2基于特征的影像匹配
最小二乘影像匹配,都是以待定点为中心的两
窗口影像的灰度分布为基础的,因此,也称为基于面积的影像匹配。这种方法当待匹配的点位于低反差区内,即在该窗口内信息贫乏,信噪比很小,则其匹配的成功率不高;再者当诸如影像的不连续、目标的阴影以及不同季节、不同时相获取影像所造成的灰度反转等问题,使得基于面积的影像匹配算法就难以适应,而利用基于特征的影像匹配的算法,就能够较好地解决这类问题。
基于特征的匹配简称为特征匹配,在计算机视觉中,也称为基于图元的匹配。特征匹配主要利用影像灰度的急剧变化而形成的点、线、面的特征,特征匹配可分为以下四个过程如图2所示:
差分)最大或二阶导数(或差分)为零的点。常用方法有差分算子、拉普拉斯算子、LOG 算子等。
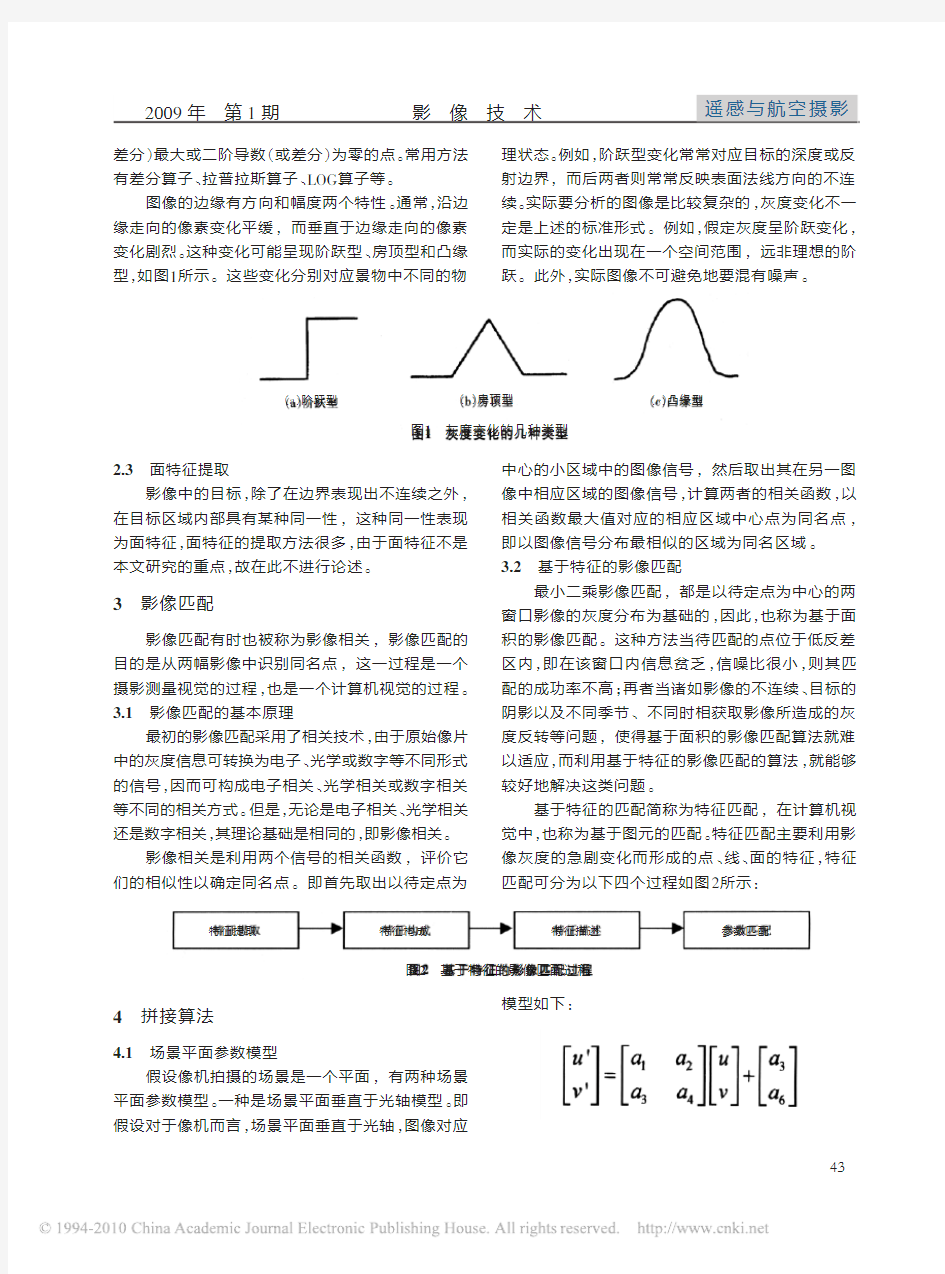
图像的边缘有方向和幅度两个特性。通常,沿边缘走向的像素变化平缓,而垂直于边缘走向的像素变化剧烈。这种变化可能呈现阶跃型、房顶型和凸缘型,如图1所示。这些变化分别对应景物中不同的物
理状态。例如,阶跃型变化常常对应目标的深度或反射边界,而后两者则常常反映表面法线方向的不连续。实际要分析的图像是比较复杂的,灰度变化不一
定是上述的标准形式。例如,假定灰度呈阶跃变化,而实际的变化出现在一个空间范围,远非理想的阶跃。此外,实际图像不可避免地要混有噪声。
图1灰度变化的几种类型
(a )阶跃型(b )房顶型(c )凸缘型
图2基于特征的影像匹配过程
▲
▲
▲
特征提取特征构成特征描述参数匹配
其中,u ,v ,u ′,v ′为相邻图像的图像位置坐标。利用最小二乘法可得到参数值。另一种是场景平面不垂直于光轴模型。即假设对于像机而言,场景平面不一定垂直于光轴,图像对应模型如下:
其中,u ,v ,u ′,v ′为相邻图像的图像位置坐标。利用最小二乘法可得到参数值。
4.2模型参数的初始值
在计算机自动提取特征点后,采用手工的方式
选取其中的一些目测下位置较一致的特征点作为求取模型参数的初始对应控制点。控制点的位置应当减少局部误差的影响。在系统实现中,最后采用图3的选择方式,在图像的重叠多边形的每个边界角上,一般取2个对应控制点(也可以只选一个点),这样是为了使得图像拼接后边界处色彩更连续一些,同时,在重叠区域的中间也选了一个点,这是为了增强重叠区域内部匹配的准确性。利用这样得到的对应控制点,通过使用最小二乘法,可以把模型参数的初始值计算出来。
在两幅图像的重叠区域,根据模型计算得到的对应点不一定是真正的对应点。从而对给定的一幅图中的像素点,在计算得到的对应点邻域内(区域大小为
5Pixel ×5Pixel),要搜索真正的对应点。为了消除旋转
对于相似程度的影响,对于要比较相似程度的两个像素位置,在以像素为中心的3Pixel ×3Pixel 区域内。
为了比较两个像素点的相似程度,定义di 为循环排序的第一个像素位置的0,1,…,7,8像素分别与第二个像素位置的i 模8,(i +1)模8,…,(i +7)模8,8像
素的颜色差值平方和。从而定义与旋转无关的距离为:
i=0,……7这样,找到对应点邻
域内最相似点作为真正的对应点。
4.3模型参数的迭代求解
对于两幅进行拼接的图像,手工选择的对应控制点只是其中的几对,模型参数的迭代求解方法,就是要从这起初手工选取的对应控制点得到尽可能多的
对应点。每次根据模型参数得到新的对应点集,再根据对应点集计算得到新的模型参数,从而形成迭代求解的过程,直到模型参数不再变化,得到稳定的参数解(或者迭代次数超过预定值,此时迭代失败,需要重新选择初始对应控制点)。
具体步骤如下:在两幅图中的重叠区域,对第一幅图中的任一特征点根据模型计算其对应点位置,若对应点的小邻域内(在系统中,采用的是以对应点为中心的5Pixel ×5Pixel 小区域)有特征点存在,则把它们作为一对计算对应点;在计算对应点为中心的
5Pixel ×5Pixel 区域中,把最相似点作为真对应点;利
用新的对应点计算模型参数,如模型参数不稳定,则继续进行迭代。
这种策略的合理性在于,若模型参数误差很小,并且该特征点的真对应点也为特征点,则真对应特征点应该在计算得到的假对应点附近(即在计算得到的假对应点附近应该有特征点存在)。即使在模型参数误差稍微大些的情况下,由于原对应点集中的对应点基本满足参数模型对应关系,从而这些点附近的对应点也是基本满足参数模型的,此时,这些原对应点集附近的对应特征点将很可能先被搜索到。对于整个搜索中,当然可能有假对应特征点存在,但这在整个对应点集中将只占很少数,并且随着正确的对应特征点的数目的增加,将越来越微不足道。
4.4拼接场景图像的生成
要从两幅图构造完整的拼接图像,首先是确定拼接图像的布局位置。采用第一幅图作为拼接图像的参照系,将第二幅图像点对应到第一幅图中去。首先,根据参数模型的逆变换,得到图像二的四个角上像素点的对应点坐标(x 1,y 1),(x 2,y 2),(x 3,y 3),(x 4,y 4)。然后,得到覆盖图像一矩形区域以及图像二对应区域的最小矩形,将它作为新的图像大小。接下来,要确定新的图像中的每一个像素点的颜色值。拼接图像中的像素可分为四个区域,如图4。第一种是既不属于图像1也
图3初始控制点的选取方式
图像1
图像2
图4场景中不同图像区域图5拼接结果图像
不属于图像2的像素点,称之为背景点。第二种是只属于图像1的像素点,称之为图像1点。第三种是既属于图像1也属于图像2的像素点,称之为对应点。第四种是只属于图像2的像素点,称之为图像2点。
由于这四个区域的像素的特点不一样,设定颜色值将要采用不同的策略。对于背景点,将它的像素颜色值赋为黑色。对于图像1点,颜色值不变。对于重叠点,由于它是从图像1点向图像2点的过渡区域,需要额外处理,使得最终的场景图像表现出完整性和平滑过渡性。
设P点在图像1与图像2重叠区域,在拼接图像上,从图像1的区域向图像2的区域过渡的时候图像1的颜色比重要变小,图像2的颜色比重要变大。这样,选择重叠区域中P点离两个图像边界距离大小作为颜色值的比重大小。这在某种程度上体现了这种变化趋势。然后,具体的颜色值用颜色值加权方式得到。对于图像2点,由于以图像1点为坐标架,根据参数变换的计算结果不一定是整数,这就是一个在图像2中重新采样的问题。在实际中,一种最简单的方式是取最近的像素点的颜色值作为该点的颜色值。而通常也可用线性加权平均等方法来求得颜色值。在拼接多幅图像时,由于在拼接图像中将背景用黑色(0,0,0)表示,从而,在进行对应点搜索时,将先判断像素的颜色,如果为黑色,就将它看作背景点,而直接用参数模型计算的结果来得到像素点的颜色。否则,还用前面介绍的方法来确定像素颜色。
根据前面的分析,从而总的处理流程分如下6步:①对基准图像和拼接图像平滑;②生成特征点图;③手工选择初始控制点;④根据对应点计算模型参数,模型参数稳定则执行步骤⑥,迭代次数过大则退出;⑤根据对应点生成新的对应点,执行步骤④;⑥场景图像的生成。
拼接结果如图5所示。
5结论
无人机航空像片拼接的数字化、自动化处理满足了无人机部队对航空像片拼接处理的需求,满足了大范围战场目标判读、定位、监控的需要,从而提高了无人机信息处理能力,在一定程度上提高了无人机作战效能。
参考文献:
[1]Szeliski Richard,Coughlan James.Hierarchical spline-based image registration[C].Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition,1994.
[2]Peleg Shmuel,Herman Joshua,Panoramic mosaics by manifold projection[C].Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition,1997.
[3]H.Y.Shum,R Szeliski.Panoramic Image Mosaic[R].
Microsoft Research:Technical Report,MSRJR-97-23,1997.[4]韦燕凤.基于特征的遥感图像自动配准算法[J].电子学报,2005.
[5]朴永旭.基于多特征遥感图像配准方法的研究[M].东北师范大学图书馆,2006。
[6]安兴华,等.一种适用于机群系统的细粒度遥感图像镶嵌并行算法[J].清华大学学报(自然科学版),2002,2(10).[7]朱述龙,钱曾波.遥感影像镶嵌时拼接缝的消除方法[L].遥感学报,2002,6(3).
[8]蒋红成.多幅遥感图像自动裁剪镶嵌与色彩均衡研究[D].
中科院硕士学位论文,2004.
[9]叶朝阳.大视场图像拼接原理和应用[D].浙江大学硕士学位论文,2004.
最新无人机应用于航空测绘的解决方案
最新无人机应用于航空测绘的解决方案 篇一:无人机应用于航空测绘解决方案 无人机应用于航空测绘解决方案 一、背景简介 1、行业背景 随着3S技术为代表的高新测绘技术和计算机技术的快速发展,传统的测绘行业正在迅速向地理信息产业转化。传统的测绘生产主体模式已发生根本性变化,产品由模拟形式转为数字形式,大量的外业测量被室内地理信息采集所取代。地理信息的采集、存贮、加工和分发已成为一种全新的概念。 2、行业需求 随着市场经济体制的建立和不断完善,测绘市场发育趋向成熟。首先,测绘产品的需求不断增大,服务领域不断拓宽。近年来,除传统用户外,电信、公安、环保、金融等行业的需求不断增长,测绘产品的服务面几乎覆盖了国民经济的所有行业,初步实现了测绘为国民经济建设、国防、民众和政府服务的行业目标,充分显示了测绘行业的重要性。 二、行业需求分析 三、无人机航空测绘系统具体解决方案 (一)应用无人机遥感技术采集数据 我司通过无人机航摄所获取的竖直摄影影像、交向摄影影像、倾斜影影像以及复杂航线多基线摄影影像;通过多
视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。 (1)快速响应 无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。 (2)快速获取地表数据和建模 系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。 (二)利用像素工厂进行后期数据处理 公司利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。 像素工厂(Pixel Factory,PF)由法国SPOT INFOTERRA 公司研制开发,是一套用于大型生产的对地观测数据处理系
无人机的图像处理综述
无人机图像处理综述 摘要:目标识别与跟踪技术是无人作战机实施攻击的关键步骤,本文从无人作战机的自动目标识别与跟踪的基本概念入手,以成像传感器的目标识别与跟踪为例,介绍目标识别、检测、跟踪等关键技术。 关键词:无人战斗机目标识别图像处理识别技术 一、引言 无人战斗机在最近几年成为无人机的发展热点。它的设计概念介于有人战斗机与导弹之间。无人战斗机不是孤立存在的,它是整个无人战斗机系统的一部分。无人战斗机系统有其独特的组成方式和管理模式。目前,无人战斗机的开发刚刚处于起步阶段。为了发展无人战斗机,有许多关键技术值得注意,特别是目标识别技术。它主要包括视觉图像预处理,目标提取、目标跟踪、数据融合等问题。其中,运动目标检测可采用背景差法、帧差法、光流法等,固定标志物检测可用到角点提取、边提取、不变矩、Hough 变换、贪婪算法等,目标跟踪可以分析特征进行状态估计,并与其他传感器融合,用到的方法有卡尔曼滤波、粒子滤波器和人工神经网络等。还有很多方法诸如全景图像几何形变的分析或者地平线的检测等没有进行特征提取,而是直接将图像的某一变量加到控制中去。 实际应用中,上述问题的进一步解决受到很多因素的制约。由于无人机的动力、载重、装配空间等物理条件的限制以及飞行速度更快,使得算法处理需要更少的延时。而且,无人机稀疏的室外飞行环境使得适用于地面机器人的算法不适用于无人机。同时,模型的不确定性,噪声和干扰,都限制了实物实验的成功。所以,如何将地面机器人的视觉导航成果应用到无人机视觉导航中去,如何提高无人机的算法速度并不过分损失导航精度,如何面对无人机自身模型的不确定度以及外界噪声的干扰,如何适应无人机所处的标志物稀疏的飞行环境,这些问题都需要更进一步的探讨。 二、无人机图像处理技术现状 1979年,Daliy等人首先把雷达图像和Landsat.MSS图像的复合图像用于地质解释,其处理过程可以看作是最简单的图像融合。1981年,Laner和Todd 进行了Landsat. RBV和MSS图像融合试验。 到20世纪80年代中后期,图像融合技术开始引起人们的重视,陆续有人将图像融合技术应用于遥感多谱图像的分析和处理。 到20世纪80年代末,人们才开始将图像融合应用于一般图像融合(可见光、红外等)。多波段SAR雷达相继开发使得对多波段的SAR图像数据融合技术的研究成为可能,特别是美国宇航局1993年9月成功发射了全世界第一部多波段(L,C, X波段)、多极化、多投射角空间SAR之后,为多波段的SAR图像融合提供了坚实的物质基础。 20世纪90年代后,图像融合技术的研究呈不断上升趋势,应用的领域也遍
无人机航空摄影正射影像及地形图制作项目技术方案设计
无人机大比例尺地形图航空摄影、正射影像制作项目技术方案
1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像及地形图。 1.1作业范围 呼伦贝尔市北部区域约400平方公里。如下图:
飞行区域(红色) 1.2作业内容 对甲方指定的范围进行1:2000航空摄影,获取高分辨率的彩色影像。 1.3行政隶属 任务区范围隶属于呼伦贝尔市。 1.4作业区自然地理概况和已有资料情况 1.5 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~53°20′。东西630公里、南北700公里,总面积26.2万平方公里[2] ,占自治区面积的21.4%,相当于山东省与江苏省两省面积之和。南部与兴安盟相连,东部以嫩江为界与黑龙江省大兴安岭地区为邻,北和西北部以额尔古纳河为界与俄罗斯接壤,西和西南部同蒙古国交界。边境线总长1733.32公里,其中中俄边界1051.08公里,中蒙边界682.24公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北直贯境内。东部为大兴安岭东麓,东北平原——松嫩平原边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。 (3)气候状况 呼伦贝尔地处温带北部,大陆性气候显著。以根河与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 1.6已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统(GPS)测量规范》GB/T 18314-2009; (2)全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010; (3)《低空数字航空摄影规范》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》CH/Z3004-2010;
无人机航空管制
赵春年 140146336 无人机空中管制 摘要:随着无人机的大量应用,将会有越来越多的无人机出现在天空,无人机空中管制问题已成为亟待研究和解决的突出问题。无人机空中管制的最终目标是使无人机能够同有人机一样的使用空域。解决无人机空中管制问题,必需从技术和管理两个方面采取措施。技术措施包括为无人机装备先进的航管设备,提高无人机的智能程度,使无人机具备“感知与规避”能力等。管理措施包括建立和确定无人机的适航标准、人员资格标准、空域使用规则和相关程序等。 无人机的现状与未来的趋势 随着民用无人机的大量应用,越来越多的无人机出现在天空,无人机空中管制问题已成为未来民航管制必需要深入研究和解决的突出问题。有关部门必需对无人机空中管制问题尽早做出安排和规划,以维护正常的空中秩序,保证各类飞行安全,促进无人机产业的正常发展。 无人机在民用领域的应用越来越广泛,无人机已应用于地质探测、测绘、灾害监测、边境监控、电力线路监测、反恐和毒品种植监测等许多领域。这些无人机也要与军民航的有人飞机共同使用空域。 无人机的大量涌现,对现有以有人飞机为主的空中管制格局带来了新的挑战。如何保证战时各型无人机使用空域时互不影响,同时不危及有人机执行作战任务时的飞行安全;如何保证平时无人机的各种任务飞行、训练和科研试飞活动能够合理地使用空域,并不影响军民航有人飞机的正常飞行活动,这已成为当前和以后若干年内航管部门亟待解决的重要问题。 各国对无人机空中管制问题都非常重视,都花费大量人力和财力
进行研究。美国联邦航空局和国防部、欧洲民航局都下设有专门的无人机管理机构,负责研究和制定有关无人机空域使用的政策和法规。我军也应当及早开展无人机空中管制问题的研究及相关法规的制定,以适应无人机迅速发展的要求。 无人机的空中管制 空军尚未对无人机的空中管制问题做出明确的规定。国家民航局于2009年6月颁布的民用无人机空中交通管理办法,对民用无人机的飞行活动做出了规定。有关空域使用问题,民用无人机空中交通管理办法第四条规定:“为了避免对运输航空飞行安全的影响,未经地区管理局批准,禁止在民用运输机场飞行空域内从事无人机飞行活动,申请划设民航无人机临时空域时,应当避免与其它载人民用航空器在同一空域内飞行”。第八条规定:“不得在一个划定为无人机活动的空域内同时为民用无人机和载人航空器提供空中交通服务”。即单独为民用无人机飞行划定空域。这在无人机数量较少,飞行活动范围较小时可以做到。随着无人机数量的迅速增加,以及大量高空长航时无人机的出现,继续单独为无人机划定飞行空域将很难做到。 目前美国和欧洲无人机空域管理主要采用划定隔离空域的方法来保证安全。在美国本土,联邦航空局规定无人机只能在限定的空域内(都在18000英尺以下)飞行,某些情况下允许无人机在管制员连续的雷达监控下在18000英尺(5487米)以上飞行;但是无人机高空飞行时必需有一架伴随巡逻的有人飞机目视跟踪监视无人机的飞
无人机应用于航空测绘解决方案
无人机应用于航空测绘解决方案 一、背景简介 1、行业背景 随着3S技术为代表的高新测绘技术和计算机技术的快速发展,传统的测绘行业正在迅速向地理信息产业转化。传统的测绘生产主体模式已发生根本性变化,产品由模拟形式转为数字形式,大量的外业测量被室内地理信息采集所取代。地理信息的采集、存贮、加工和分发已成为一种全新的概念。 2、行业需求 随着市场经济体制的建立和不断完善,测绘市场发育趋向成熟。首先,测绘产品的需求不断增大,服务领域不断拓宽。近年来,除传统用户外,电信、公安、环保、金融等行业的需求不断增长,测绘产品的服务面几乎覆盖了国民经济的所有行业,初步实现了测绘为国民经济建设、国防、民众和政府服务的行业目标,充分显示了测绘行业的重要性。 二、行业需求分析 三、无人机航空测绘系统具体解决方案
(一)应用无人机遥感技术采集数据 我司通过无人机航摄所获取的竖直摄影影像、交向摄影影像、倾斜影影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达10000片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。 (1)快速响应 无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。 (2)快速获取地表数据和建模 系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。 (二)利用像素工厂进行后期数据处理 公司利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。 像素工厂(Pixel Factory,PF)由法国SPOT INFOTERRA公司研制开发,是一套用于大型生产的对地观测数据处理系统,是一种能批量生产,且由一系列算法、工作流程和硬件设备组成的复合最优化系统,包含具有强大计算能力的若
浅析无人机航空摄影测量系统及应用
浅析无人机航空摄影测量系统及应用 发表时间:2017-10-26T19:53:11.473Z 来源:《建筑科技》2017年9期作者:舒永国 [导读] 发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 北京市自来水集团禹通市政工程有限公司北京 100089 摘要:测绘测量技术系统是应对自然灾害、有效处置突发事件、构建完善保障系统与加强防灾减灾工作建设的重要组成部分,也是目前的一个重要战略问题。发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 关键词:无人机;航空摄影;测量系统;应用 1、前言 航空数字摄影测量是基础地理信息采集的最有效手段之一。随着计算机技术的发展和微处理机的广泛应用,政府各部门对测绘资料的需求越来越大,对资料现势性要求越来越高,对资料所能包涵的信息容量越来越多。无人机航空摄影测量作为一种新型的测量方式不断呈现在大家的面前,伴随着高科技技术环境下测绘技术与测绘装备的快速发展,融合了无人机技术、航空摄影技术、移动测量技术、数字通信技术等一系列新兴技术形态的无人机航空摄影测量系统成为防灾减灾的重要手段,它建立起一整套综合应急测绘保障服务系统。 2、无人机航空摄影测量系统 目前,国内已经投入使用的无人机航空摄影测量系统有“华鹰”、“飞象”、“QuickEye”等。无人机航空摄影测量系统主要由硬件系统和软件系统组成。硬件系统包括机载系统和地面监控系统;软件系统则涵盖了航线设计、飞行控制、远程监控、航摄检查、数据预处理等五个主要的系统。 2.1硬件系统 2.1.1无人机机载系统 在整个无人机航空摄影测量系统构成中,无人机作为主要的系统搭载平台,是整个系统集成与融合的重要基础。这一硬件系统主要由无人机、数字摄影系统、导航与飞行控制系统、通信系统等部分构成。在该系统工作的过程中,整个系统会按照预先设定的航线进行相应的自主飞行,并且完成预先设定的航空摄影测量任务,同时实时地把飞机的速度、高度、飞行状态、气象状况等参数传输给地面控制系统。 2.1.2地面飞行监控系统 这一分支系统是影响飞行平台运行的重要因素,主要有电子计算机、飞行控制软件、电子通信控制介质和电台等设备。在飞行平台的运行过程中,地面飞行控制系统可以据无人机飞行控制系统发回的飞行参数信息,实时在地图上精确标定飞机的位置、飞行路线、轨迹、速度、高度和飞行姿态,使地面操作人员更容易掌握无人机的飞行状况。 2.2软件系统 2.2.1航线设计软件 航线设计在无人机航空摄影测量系统中扮演着十分重要的角色,其直接决定了整个系统工作的方向和精准度。这一分支系统作为信息采集的关键步骤,需要对于系统运行经过的作业范围、地形地貌特点、属性精度要求、摄影测量参数以及摄影测量的结果进行综合设定。航线设计软件需要对相关的工作参数进行综合设定,诸如计算行高、重叠度和地面分辨率等飞行参数,进而获得飞行所需的曝光点坐标、基线长度等参数。此外,航线设计软件还有一个十分重要的功能,那就是对于设计好的航线进行检查,诸如:航线走向、摄影基面、行高、地面分辨率和像片重叠度等。 2.2.2数据接受与预处理系统 这是无人机系统中最为重要的软件系统,也是无人机航空摄影测量系统室外作业的最后一步,直接影响到后续的图像数据处理质量。一般情况下,无人机航空摄影测量系统在影像获取过程中,由于受外界和内部因素的影响,可能降低获取的原始图像的质量。为避免原始图像后续处理的质量问题,在影像配准、拼接之前,必须对原始影像进行预处理。这一预处理的过程,先后涵盖了图像校正、图像增强等方面。 3、项目应用实践 3.1工程概况 井山水库位于抚河流域东乡河南港支流黎圩水上游,地处江西省抚州市东乡县黎圩镇内,坝址位于南港支流东乡县黎圩镇井山村上游河段1.0km狭谷段,坝址区距黎圩镇约5km,距东乡县县城约25km,控制流域面积25.2km2,正常蓄水位83.00m(黄海高程,下同),总库容2250×104m3,是一座灌溉、供水等综合效益的中型水利枢纽工程。 3.2外业测量 3.2.1航摄 航摄仪采用Sonya7R,焦距35mm,相幅大小为:7360×4192,像元分辨率为4.88um。本次无人机航摄分两个架次进行,由GPS领航数据计算相对飞行高度为724m,地面分辨率为0.09m,航摄面积约10km2。两个架次飞行质量和影像良好,影像清晰度较高,且照片色彩均匀,饱和度良好,能够表达真实的地物信息,可以满足1:2000成图要求。本次飞行航向重叠度为75%,旁向重叠度为50%。 3.2.2像控测量 像控点的布设应能够有效控制成图的范围,测区的四周及中心位置必须布设控制点,根据测区的情况,每个测区布设控制点20多个,且都设置为平高点。 3.2.3空中三角测量 本项目采用SVS软件进行空三加密,根据航空飞行及影像分布情况,将空三区域分为两个加密区域网采用自动与手动相结合的方式进行空三加密,即采用自动匹配进行像点量测,剔除粗差。人工调整直至连接点符合规范要求,保证在2/3个像素以内。加入外业像控点对本
无人机后期航片拼接软件PhotoScan详细使用教程
无人机后期航片拼接软件PhotoScan详细使用教程 摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。 PhotoScan是一款基于影像自动生成高质量三维模型的软件。使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。使用控制点可达5cm精度。完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。 航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。对电脑硬件的依赖也比其他要低。很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan 了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。 PhotoScan优势盘点: 支持倾斜影像、多源影像、多光谱影像的自动空三处理 支持多航高、多分辨率影像等各类影像的自动空三处理 具有影像掩模添加、畸变去除等功能 能够顺利处理非常规的航线数据或包含航摄漏洞的数据 支持多核、多线程CPU运算,支持CPU加速运算 支持数据分块拆分处理,高效快速地处理大数据 操作简单,容易掌握 处理速度快 不足: 缺少正射影像编辑修改功能 缺少点云环境下量测功能
无人机后期航片拼接软件PhotoScan详细使用教程(精编文档).doc
【最新整理,下载后即可编辑】 无人机后期航片拼接软件PhotoScan详细使用教程 摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。 PhotoScan是一款基于影像自动生成高质量三维模型的软件。使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。 无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。 PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。使用控制点可达5cm精度。完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。 Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。对电脑硬件的依赖也比其他要低。很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。 PhotoScan优势盘点: 支持倾斜影像、多源影像、多光谱影像的自动空三处理 支持多航高、多分辨率影像等各类影像的自动空三处理 具有影像掩模添加、畸变去除等功能 能够顺利处理非常规的航线数据或包含航摄漏洞的数据 支持多核、多线程CPU运算,支持CPU加速运算 支持数据分块拆分处理,高效快速地处理大数据 操作简单,容易掌握 处理速度快 不足: 缺少正射影像编辑修改功能 缺少点云环境下量测功能
详细解析无人机航空测绘特点
详细解析无人机航空测绘特点
详细解析无人机航拍测绘特点【系统概括】无人机航空摄影测量是指利用轻型无人机搭载高分辨率数字彩色航摄相机获取测区影像数据,使用GPS在测区布设像控点,在数字摄影测量工作站进行作业,获取测绘数据等。(无人机航拍测绘也是红点航拍公司发展的一项内容之一,至今已经多次进行过航拍测绘,经验丰富,客户满意度比较高,百度搜索红点航拍了解详情) 【核心技术】在航空测绘作业活动中,无人机具有机动灵活、反应迅速等诸多优点。是DEM数据获取的一项重要手段,能够填补通用航空在小面积、大比例尺摄影测量方面的空白。 【显著特点】无人机其具有续航时间长、影像实时传输、高危地区探测、成本低、机动灵活等优
技术、图像传输、信息对抗与反对抗、发射回收、生产制造和实际应用等诸多技术领域都有了长足的进步,现代化水平有了明显提高。 无人机航测特点 (1)机动快速的响应能力 无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。
(2)综合应用能力强 系统既可发挥其独特的作用,又可与卫星遥感、航空测绘及地面监测手段综合应用。(3)地表数据快速获取和建模能力 系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像
和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。 (4)突出的时效性和性价比 相比卫星和有人机测绘,可做到短时间内快速完成,及时提供用户所需成果,且价格具有相当的优势。相比人工测绘,无人机每天至少几十平方
无人机航空电子系统研究
无人机航空电子系统研究* 高劲松邹庆元杨慧 中国航空工业第一集团公司第六一三研究所 摘要 本文在分析无人机系统的基础上,研究了无人机航空电子系统。本文认为一套无人机航电系统应该看成是由空中和地面三个相对独立的不同平台上的局域网组成的对外开发可扩展的具有互操作性的分布式系统。空中的一个局域网和地面的控制站及发射回收系统两个局域网通过数据链路连接。空中部分的局域网由飞机上的飞行器和有效载荷通过数据总线连接。空中部分的局域网和地面部分的局域网通过数据链连接。无人机航空电子系统的这三个局域网是整个作战网络中的三个节点,可以和网络中的其它节点进行信息交联和互操作。 关键词 UAV,航空电子系统 一般一套UAV系统常由五部分组成:飞行器、有效载荷、数据链系统、控制站、发射回收系统,以及相关的辅助系统组成。飞行器载着有效载荷和数据链系统的一部分在空中飞行。数据链的另一部分和控制站在一起,可能在空中,也可能在地面,操作员(包括飞行器和有效载荷操作员)通过控制站对UAV 进行控制。无人机系统是一种电子系统,又是一种机械系统。UAV系统的功能通过机械和电子信息系统完的电子信息系统,即航空电子系统。 成,这里主要研究UAV 1 无人机系统组成 *本文受航空科学基金04D13003和火力控制国防科技重点实验室资助
一套无人机系统的物理实体由五个主要的子系统组成,一般都至少应包括多个飞行器、根据任务安排配置的有效载荷、一个或多个控制站(可能在空中,也可能在地面)、数据链路系统,和一个发射与回收系统(有些UAV可能没有),以及一些相应的地面支援设备。无人机系统通过装载有效载荷的飞行器、控制站和发射回收系统与外界发生信息交联,图1为“捕食者”无人机系统的作战过程示意图。 飞行器是无人机系统的空中部分,包括飞机机体、推进装置、飞行操纵装置、供电系统,以及飞行器管理系统和相关的支持设备。飞行器管理系统对飞行器进行管理,和有效载荷中的任务管理系统进行信息交联,并通过数据链路和地面控制站进行信息交联。飞行数据终端被安装在无人机上,它是数据链路的机载部分。 有效载荷虽然是机载的,但在无人机系统研究中它却被认为是独立的子系统,能够在不同的飞行器之间通用,并且经过特别设计,能够完成各种不同任务。携带有效载荷是使用无人机系统的主要原因。在无人机系统中术语“有效载荷”指那些为了执行任务而装备到无人机上的设备,无人机是这些设备的平台和运输工具。有效载荷包括执行侦察、电子战、通讯中继和对地、对空攻击火控任务的传感器、发射机和相关武器管理系统,以及对这些任务进行管理的任务管理系统和相关设备。根据不同的任务在无人机起飞前加装不同的载荷,当加装了武器后就是UCAV。任务管理系统对全部载荷进行管理,和飞行器管理系统进行信息交联,通过数据链路和地面控制站进行信息交联。 控制站(CS),或任务规划与控制站(MPCS)是无人机系统的作战指挥中心。可以在空中别的飞机上,一般是在地面,叫地面控制站(GCS)。无人机上传输过来的图像、指令及遥测数据在此进行处理及显示。数据通常通过地面终端进行中转,地面数据终端是数据链路的地面部分。地面控制站由任务规划设备、控制及显控台、图像及遥测设施、计算机及信号处理器、通讯设备、环境控制及生存能力保护设备组成。进行任务规划和有效载荷操纵的有效载荷操作员和对飞行器飞行进行操纵的飞行器操作员都在地面控制站。 数据链路能根据要求提供无人机系统空中和地面部分的双向通讯。数据链路的上行链路提供对无人机飞行器飞行路线的控制及对有效载荷下达指令,下行链路对地面控制站传输无人机飞行器和有效载荷的状态信息,以及有效载荷获得的各种信息,包括视频信号。数据链路还可以通过测定无人机相对于地面控制站的距离和方位测定自身的位置,以便导航和对目标的精确定位。数据链路的硬件设备包括通过硬电缆(常是光纤电缆)和地面控制站相连的地面数据终端和装在飞行器上的空中数据终端。数据链路在战时必须具有抗干扰的功能。 发射和回收系统负责进行无人机的发射和回收,以及在飞行器发射前为其装定初始任务。虽然它是无人机系统中非常重要的部分,但是因为它是为飞行器的起飞和着陆服务的,所以在某些无人机系统中可能没有这个系统。 地面支援设备包括移动无人机的设备(如将无人机放置到发射架上),电源,以及测试和维护设备。 2 无人机航空电子系统研究 对无人机航空电子系统理解取决于从何种角度看无人机系统(这里讨论的一套无人机系统由一个飞行器和有效载荷、数据链系统、一个地面控制站和一个发射回收系统组成)。从传统的基于平台的角度看,一套无人机系统是作为一个整体出现在整个作战体系中的,是整个体系中完成某特定任务的一个节点,体系中的其它部分不能对无人机系统的特定部分进行信息交联和操作,如图2所示。 从现在的基于网络的网络中心战的角度看,一套无人机系统虽然是在整个作战体系中的一个子系统,但是在作战网络中是分布在不同地域的三个节点,即一个地面控制站节点、一个无人机发射回收节点、以及一个带有特定载荷的特定飞行器,网络中的其它节点可以与三个节点进行信息交联和互操作,如图3所示。 实际上,一套无人机系统应该看成是由空中和地面三个相对独立的不同平台上的局域网组成的对外开发可扩展的具有互操作性的分布式系统。空中的一个局域网和地面的两个局域网通过数据链路连接。 空中部分的局域网由飞机上的飞行器和有效载荷通过数据总线连接。其中飞行器中飞行器管理系统
无人机遥感图像自动拼接方法的研究
目录 摘要 ................................................................................................................................................................................................ I Abstract......................................................................................................................................................................................... I I 目录......................................................................................................................................................................................... IV 第1章绪论 . (1) 1.1 研究的背景和意义 (1) 1.2 国内外研究现状 (2) 1.3 本文的研究工作 (3) 1.4 本文的组织结构 (4) 第2章图像拼接的基础理论和相关技术 (5) 2.1图像拼接的特点 (5) 2.1.1 图像拼接的针对性 (5) 2.1.2 图像拼接的多样性 (5) 2.1.3 图像拼接的复杂性 (6) 2.2图像拼接的常用方法 (6) 2.3图像拼接的一般流程 (7) 2.4 图像配准 (7) 2.4.1 图像配准的分类 (7) 2.4.2 图像配准的常用方法 (9) 2.5 OpenCV技术简介 (10) 2.5.1 OpenCV模块 (10) 2.5.2 OpenCV的功能 (11) 2.6本章小结 (11) 第3章特征点检测算法 (12) 3.1 SIFT算法 (12) 3.1.1 尺度空间和极值检测 (12) 3.1.2 精确确定特征点 (14) 3.1.3 确定特征点的主方向 (16) 3.1.4 特征向量的生成 (16) 3.2 SURF 算法 (18) 3.2.1构建尺度空间 (19)
无人机航空摄影 正射影像及地形图制作项目技术方案
无人机大比例尺地形图航空摄影、正射影 像制作项目技术方案 1、概述 根据项目需求对项目区进行彩色数码航空摄影,获取真彩数码航片,并制作正射影像及地形图。 1.1作业范围 呼伦贝尔市北部区域约400平方公里。如下图:
飞行区域(红色) 1.2作业内容 对甲方指定的范围进行1:2000航空摄影,获取高分辨率的彩色影像。 1.3行政隶属 任务区范围隶属于呼伦贝尔市。 1.4作业区自然地理概况和已有资料情况 1.5 作业区自然地理概况 (1)地理位置 呼伦贝尔市地处东经115°31′~126°04′、北纬47°05′~53°20′。东西630公里、南北700公里,总面积26.2万平方公里?[2]??,占自治区面积的21.4%,相当于山东省与江苏省两省面积之和。南部与兴安盟相连,东部以嫩江为界与黑龙江省大兴安岭地区为邻,北和西北部以额尔古纳河为界与俄罗斯接壤,西和西南部同蒙古国交界。边境线总长1733.32公里,其中中俄边界1051.08公里,中蒙边界682.24公里。 (2)地形概况 呼伦贝尔市西部位于内蒙古高原东北部,北部与南部被大兴安岭南北直贯境内。东部为大兴安岭东麓,东北平原——松嫩平原边缘。地形总体特点为:西高东低。地势分布呈由西到东地势缓慢过渡。
(3)气候状况 呼伦贝尔地处温带北部,大陆性气候显着。以根河与额尔古纳河交汇处为北起点,向南大致沿120°E经线划界:以西为中温带大陆性草原气候;以东的大兴安岭山区为中温带季风性混交林气候,低山丘陵和平原地区为中温带季风性森林草原气候,“乌玛-奇乾-根河-图里河-新帐房-加格达奇-125°E蒙黑界”以北属于寒温带季风性针叶林气候。 1.6已有资料情况 甲方提供的航飞范围。 2、作业依据 (1)《全球定位系统(GPS)测量规范》GB/T 18314-2009; (2)全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010; (3)《低空数字航空摄影规范》CH/Z3005-2010; (4)《低空数字航空摄影测量外业规范》CH/Z3004-2010; (5)《航空摄影技术设计规范》GB/T 19294-2003; (6)《摄影测量航空摄影仪技术要求》MH/T 1005-1996; (7)《航空摄影仪检测规范》MH/T 1006-1996; (8)《航空摄影产品的注记与包装》GB/T 16176-1996;
无人机影像完整解决方案讲课讲稿
无人机影像完整解决 方案
无人机小数码影像完整解决方案 一、无人机小数码影像优点 (2) 二、无人机小数码影像缺点 (3) 三、传统解决方案的精度与效率 (5) 四、VISIONTEK无人机小数码影像解决方案 (5) 1、产品组成 (6) 2、产品特点 (6) 五、传统解决方案和远景无人机小数码影像完整解决方案对比 (11) 六、低空无人机小数码完整解决方案应用行业 (12) 七、案例 (13) 一、无人机小数码影像优点 1.影像获取快捷方便 无需专业航测设备,普通民用单反相机即可作为影像获取的传感器,操控手经过短期培训学习即可操控整个系统。 2.成本低廉 无人机(带飞控系统)市场价格10万到100万,各种档次都有,而相机整套(机身加镜头)不到2万,整套系统成本低廉。 3.整个系统机动性强 整套设备不需要专门机场调运、调配,可用小型汽车装载托运,随时下车组装,3个工作人员2小时内可组装完毕。 4.受气候条件影响小 只要不下雨、下雪并且空中风速小于6级,即使是光照不足的阴天,飞机也可上天航拍。 5.飞行条件需求较低 不需要专门机场和跑道,可在普通公路上滑跑起降或采用弹射方式起飞和伞降方式降落。 6.满足大比例尺成图要求 满足《低空数字航空摄影测量内业规范》CH/Z 3003-2010 1:500、1:1000、1:2000大比例尺成图精度要求,满足传统航测规范 GB 7930-1987和GB/T 7930-2008 中1:1000和1:2000大比例尺成图精度要求。 7.影像获取周期短、时效性强 无人机遥感几乎不受场地和天气影响,飞行前准备工作可少于2个小时,因此可快速上天获取满足要求的遥感影像,从准备航飞到获取影像周期短,影像获取后可立即处理得到航测成果,时效性强。
航空航天及无人机智能处理系统
航空航天及无人机智能处理系统 通过领先的匹配技术达到高精确度。通过交叉的多重连接点的连接,以及相片间的条带间的连接,加之有效的质量保证方法,来达到高可靠性。所有处理步骤都是全自动的。并且能够支持航天、航空和无人机等各种类型数据。 一、主要包括以下模块 1、ApplicationsMaster主框架模块 1)、系统核心,提供用户界面和启动其他系统模块。 2)、可以把传感器参数、影像参数、DTMs、正射影像参数、大地基准面参数,以及投影参数等储存在一个通用文件中。 3)、支持将工程文件容易的输入、输出到其他系统中以备将来使用。 4)、支持把完整的项目,包括定向数据和正射像片变换到大量的大地基准面和地图投影中。支持2000多种已定义的坐标系统。用户还可定义自己的坐标系统。 5)、支持多种航空影像和卫星影像。可从Applanix POS/AV/POSEO,IGI AEROControl等系统中输入GPS相机位置和惯导数据。 6)、包含影像处理工具、影像定位工具、DTM 工具包。 2、MATCH-AT 1)、世界领先的全自动空三软件,准确、可靠、生产效率高。通过领先的匹配技术达到高精确度。通过交叉的多重连接点的连接,以及相片间的条带间的连接,加之有效的质量保证方法,来达到高可靠性。所有处理步骤都是全自动的。 2)、对点的选择, 点的变换和点的量测采用单一的,全自动的处理方式, 综合的自动化的整体测区平差,使用户的参预降到最小。 3)、对测区的大小、形状或重叠没有限制。图象中的连接点是全自动选取的。在每个图象金字塔层上,通过运行自动的整体测区平差程序来达到对连接点的强有力的内部质量控制。可灵活地对不同的观测结果赋予不同的权重。 4)、支持各种胶片和数字框幅式传感器。在一个测区内支持多种相机。支持相机自定标。 5)、全自动内定向。先进的亚区处理工具。可对GPS 数据进行平移和漂移处理、IMU 数据处理。强有力的测区图解分析工具。 6)、支持多种输入/输出格式:DAT/EM Summit Evolution, BAE Socet set, Z/I project, AviosoftOri, ABC-PC, AP32, Phorex/Pex, PATB, Bluh, Bingo 7)、既可以处理RC30等传统胶片式相机,可以处理DMC\UCD\UCX等数字框幅式相机数据,也可以处理无人机等非量测相机(佳能、尼康、柯达等)。 3、MATCH-T 1)、自动化的数字地面模型(DTM/DSM) 生产模块。高效率地全自动地生产高精度的、可靠的数字地面模型。 2)、可生产针对整个测区,或任一个亚区,或任意一个多边形区域内的无缝的DTM。 3)、可从航空图象(框幅式相机和线型传感器),和各种卫星影像(Ikonos, Quickbird, Spot, Landsat, IRS C/D, Aster)中生产DTM。 4)、用户可以自定义要生产无缝的DTM 的区域。它可以是任何一个亚区,
大区域无人机航拍图像拼接算法研究
目录 摘要 (i) ABSTRACT .......................................................................................................................... i i 第一章绪论 (1) 1.1课题研究背景和意义 (1) 1.2国内外研究现状 (2) 1.3本文研究内容及章节安排 (4) 第二章图像拼接基础理论与实际分析 (6) 2.1成像模型 (6) 2.1.1 针孔摄相机模型 (6) 2.1.2 摄像机的旋转和平移 (7) 2.2变换模型 (8) 2.2.1平移变换 (8) 2.2.2刚体变换 (8) 2.2.3相似变换 (9) 2.2.4仿射变换 (9) 2.2.5投影变换 (9) 2.3图像拼接的基本原理与流程 (10) 2.4无人机航拍的视觉分析 (11) 2.4.1相机之间的映射 (12) 2.4.2重叠图像之间的运动表示 (13) 2.4.3重叠图像之间的运动分解 (14) 2.5本章小结 (15) 第三章基于分布估计约束的序列图像全局配准算法 (16) 3.1SURF特征的提取与匹配 (16) 3.1.1 SURF描述子 (16) 3.1.2 2NN SURF特征粗匹配 (18) 3.1.3 单应矩阵估计和RANSAC(Random Sample Consensus)精匹配 (19) 3.2分布估计约束的多图像特征匹配 (20) 3.2.1 分布估计 (20) 3.2.2 分布图约束的图像特征匹配 (22)
3.3.1 累积误差和全局配准 (24) 3.3.2 常用全局配准方法 (24) 3.3.3 快速迭代全局配准 (26) 3.4实验结果与分析 (29) 3.5本章小结 (30) 第四章基于图割算法的多分辨率融合 (32) 4.1图像融合概述 (32) 4.2基于图割算法最优拼接缝搜索 (33) 4.2.1 图割理论 (33) 4.2.2 基于最小割最大流的最优拼接缝搜索 (36) 4.3加权平均融合 (38) 4.4多分辨率融合 (40) 4.5本章小结 (43) 第五章实验系统实现与结果分析 (44) 5.1软件总体流程与实现 (44) 5.2实验结果和对比分析 (46) 5.3GPU在图像拼接中的应用 (49) 5.4本章小结 (50) 第六章总结与展望 (51) 6.1工作总结 (51) 6.2研究展望 (51) 致谢 (53) 参考文献 (55) 作者在学期间取得的学术成果 (59)
无人机应用于航空测绘解决方案学习资料
无人机应用于航空测绘解决方案
无人机应用于航空测绘解决方案 一、背景简介 1、行业背景 随着3S技术为代表的高新测绘技术和计算机技术的快速发展,传统的测绘行业正在迅速向地理信息产业转化。传统的测绘生产主体模式已发生根本性变化,产品由模拟形式转为数字形式,大量的外业测量被室内地理信息采集所取代。地理信息的采集、存贮、加工和分发已成为一种全新的概念。 2、行业需求 随着市场经济体制的建立和不断完善,测绘市场发育趋向成熟。首先,测绘产品的需求不断增大,服务领域不断拓宽。近年来,除传统用户外,电信、公安、环保、金融等行业的需求不断增长,测绘产品的服务面几乎覆盖了国民经济的所有行业,初步实现了测绘为国民经济建设、国防、民众和政府服务的行业目标,充分显示了测绘行业的重要性。 、行业需求分析
三、无人机航空测绘系统具体解决方案 (一)应用无人机遥感技术采集数据 我司通过无人机航摄所获取的竖直摄影影像、交向摄影影像、倾斜影影 像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量 网,能进行多达10000片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM )和数字正射影像(DOM )等产品 1)快速响应
无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15 分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。 (2)快速获取地表数据和建模系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM 、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。 (二)利用像素工厂进行后期数据处理 公司利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。 像素工厂(Pixel Factory , PF)由法国SPOT INFOTERRA 公司研制开发,是一套用于大型生产的对地观测数据处理系统,是一种能批量生产,且由一 系列算法、工作流程和硬件设备组成的复合最优化系统,包含具有强大计算能力的若干个计算节点。输入航空数码影像、卫星影像、或者传统光学扫描影像,在少量人工干预的条件下,经过一系列自动化处理,输出包括数字表面模型(DSM )、数字高程模型 (DEM )、正射影像(DOM )以及真正射影像 TDOM )等产品,并能生成一系列其他中间产品