关于CCD参数dynamic range的详细介绍

dynamic - dynamic range
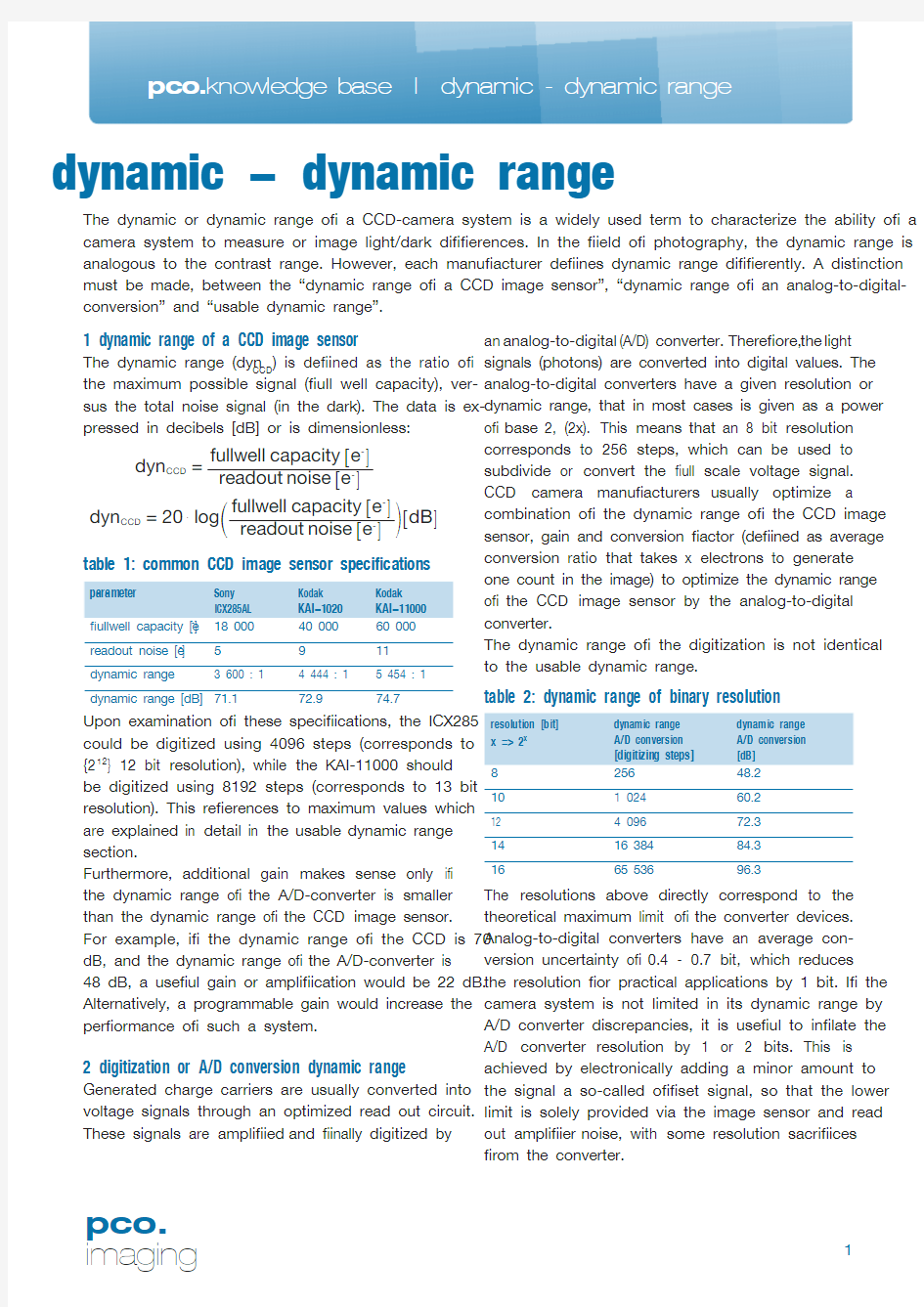
1 dynamic range of a CCD image sensor
The dynamic range (dyn CCD ) is defined as the ratio of the maximum possible signal (full well capacity), ver-sus the total noise signal (in the dark). The data is ex-pressed in decibels [dB] or is dimensionless:
dyn readout noise e fullwell capacity e CCD =
--66@@
dyn 20log readout noise e fullwell capacity e dB CCD =$-c m 666@
@
@
The dynamic or dynamic range of a CCD-camera system is a widely used term to characterize the ability of a camera system to measure or image light/dark differences. In the field of photography, the dynamic range is analogous to the contrast range. However, each manufacturer defines dynamic range differently. A distinction must be made, between the “dynamic range of a CCD image sensor”, “dynamic range of an analog-to-digital-conversion” and “usable dynamic range”.
an analog-to-digital (A/D) converter. Therefore, the light signals (photons) are converted into digital values. The analog-to-digital converters have a given resolution or dynamic range, that in most cases is given as a power of base 2, (2x). This means that an 8 bit resolution corresponds to 256 steps, which can be used to subdivide or convert the full scale voltage signal. CCD camera manufacturers usually optimize a combination of the dynamic range of the CCD image sensor, gain and conversion factor (defined as average conversion ratio that takes x electrons to generate one count in the image) to optimize the dynamic range of the CCD image sensor by the analog-to-digital converter.
The dynamic range of the digitization is not identical
to the usable dynamic range.
parameter
Sony ICX285AL Kodak KAI-1020Kodak KAI-11000fullwell capacity [e -]18 00040 00060 000readout noise [e -]
5
911dynamic range 3 600 : 1 4 444 : 1 5 454 : 1dynamic range [dB]
71.1
72.9
74.7
table 1: common CCD image sensor specifications
Upon examination of these specifications, the ICX285 could be digitized using 4096 steps (corresponds to {212} 12 bit resolution), while the KAI-11000 should be digitized using 8192 steps (corresponds to 13 bit resolution). This references to maximum values which are explained in detail in the usable dynamic range section.
Furthermore, additional gain makes sense only if the dynamic range of the A/D-converter is smaller than the dynamic range of the CCD image sensor. For example, if the dynamic range of the CCD is 70 dB, and the dynamic range of the A/D-converter is 48 dB, a useful gain or amplification would be 22 dB. Alternatively, a programmable gain would increase the performance of such a system.
The resolutions above directly correspond to the
theoretical maximum limit of the converter devices. Analog-to-digital converters have an average con-version uncertainty of 0.4 - 0.7 bit, which reduces the resolution for practical applications by 1 bit. If the camera system is not limited in its dynamic range by A/D converter discrepancies, it is useful to inflate the A/D converter resolution by 1 or 2 bits. This is achieved by electronically adding a minor amount to the signal a so-called offset signal, so that the lower limit is solely provided via the image sensor and read out amplifier noise, with some resolution sacrifices from the converter.
resolution [bit]x => 2x dynamic range A/D conversion [digitizing steps]dynamic range A/D conversion [dB]825648.210 1 02460.212 4 09672.31416 38484.316
65 536
96.3
table 2: dynamic range of binary resolution
2 digitization or A/D conversion dynamic range
Generated charge carriers are usually converted into voltage signals through an optimized read out circuit. These signals are amplified and finally digitized by
dynamic - dynamic range
4 comparing 12 bit and 8 bit dynamic range
This low light application example was recorded using a 12 bit cooled CCD camera system. The full scale, 12 bit image is completely dark. However, when the image is scaled to the 54-76 counts range, the image becomes visible. Although noise can be seen due to a weak light signal, the image can be clearly seen. Under similar conditions, but recorded with an 8 bit system
3 usable dynamic range
The actual usable dynamic range of a camera system is determined by the general settings or adjustments of the system (e.g., the quality of the dynamic range of the CCD sensor, and the compatibility between the read out circuit’s dynamic range or digitization). For example, if a full well capacity of 18 000 electrons with a CCD image sensor dynamic range ratio of 4500:1 is given, getting optimal range with a 12 bit A/D converter (4096 gray levels) is possible with a conversion factor of 4.4 electrons per step (count ). For very low noise cameras, it is sometimes advantageous to shift the signal resolution towards the lower noise limit and ignore the total dynamic range of the CCD image sensor, particularly if it is of minor interest in the speci-fic application.
A particular application can also influence the usable dynamic range. Although some manufacturers attempt to define their dynamic ranges as being independent of application, these applications have a direct effect on the limits of the dynamic range. For example, in medium to high light level applications, which are photon noise limited, the intrascene dynamics may be
smaller than the system’s dynamic range.
Figure 1
Weakly illuminated image with 12bit total dynamic displayed with
255 gray levels. scaled: 0-4095 -> 0-255 graph shows readout line
Figure 2
Same image as above with 12bit total dynamic displayed with 255
gray levels. scaled: 53-70 -> 0-255 graph shows readout line
Figure 3
Same image as above but with 8bit total dynamic displayed with 255 gray levels. scaled: 7-9 -> 0-255 graph shows readout line
europe
PCO AG
Donaupark 11
93309 Kelheim, Germany fon +49 (0)9441 2005 50fax +49 (0)9441 2005 20info@pco.de www.pco.de
america
The Cooke Corporation 6930 Metroplex Drive
Romulus, Michigan 48174, USA tel (248) 276 8820fax (248) 276 8825info@https://www.360docs.net/doc/c012263746.html, https://www.360docs.net/doc/c012263746.html,
and scaling, the image can only be processed by the human eye, using the unique capabilities of the human brain, and could not be image processed in a computer.
CCD摄像机技术介绍
CCD摄像机技术介绍 *什么是CCD *CCD的特性 *CCD的分类 *CCD摄像机的大致分类 *单片CCD摄像机的基本组成及工作原理 *CCD摄像机的应用领域 *单片CCD摄像机的主要性能指标 *CCD摄像机.使用中的注意事项 *CCD摄像机的常见故障及处理办法 *测试CCD摄像机所需的仪器设备 *工程上对图像质量的评定方法 *喜恩碧公司CCD摄像机的概况 *喜恩碧公司CCD摄像机产品质量的保障 1
一、什么是CCD CCD称为电荷耦合器件(Charge Coupled Device),它是上世纪70年代初受磁泡存储器的启发,作为MOS技术的延伸而产生的半导体器件,它是一种图像传感器。 CCD由光电效应产生的电荷转移驱动方式分为二相、三相及四相,目前我们所用的CCD均为四相驱动转移方式。 二、CCD的特性 CCD图像传感器的特性一般包括光谱特性、分辨率、暗电流、灵敏度和动态范围等。 1.光谱特性 CCD图像传感器具有很宽的感光光谱范围,其感光光谱可延伸至红外区域,利用此特性,可以在夜间无可见光照明的情况下,用辅助红外光源照明,也能使CCD图像传感器清晰地成像。 1.1CCD的光谱响应范围 CCD器件的光谱响应范围宽于人眼的视觉范围,一般在0.2~1.1μm的波长范围内。特种材料的红外CCD 的波长响应可扩展到几微米,即CCD 的光谱响应范围从远紫外,近紫外,可见光到近红外区,甚至到中红外区。 1.2人眼的视觉范围 光波的波长范围从几纳米到1 mm,即10-9 ~10-3m,而人眼的感光范围只在0.38~0.78 μm的范围。 2.分辨率 分辨率是CCD的最重要的特性,一般用器件的MTF(Modulation Transfer Function)即调制转移函数来表示。 需要说明的是,CCD芯片的分辨率与后面提到的CCD摄像机的分辨率的定义是不同的。 3.暗电流 暗电流产生的主要原因在于CCD器件本身的缺陷,而且这种器件本身还使得暗电流的产生也不均匀。 暗电流限制了器件的灵敏度、信噪比和动态范围。 暗电流的大小与温度的关系极为密切,温度每降低100C,暗电流约减少一半。 4.灵敏度和动态范围 CCD的灵敏度一般用最低照度表示,所谓灵敏度高就是要求在很低的照度下也能输出较为清晰(轮廓)的图像。 动态范围是势阱中可存储的最大电荷量和噪声决定的最小电荷量之比。 CCD势阱中可容纳的最大信号电荷量取决于CCD电极面积及器件结构,时钟驱动方式及驱动脉冲电压的幅度等因素。 5.弥散现象(Blooming) 由于CCD势阱对光信号电荷的收容能力有一定的限度,所以,当高照度光局部地照射CCD单元时,电荷量将从势阱溢出,并流入邻近势阱,光产生的图像就会失真,这就是弥散现象。 6.噪声 CCD的噪声源主要有以下几种: ①电荷注入器件产生的噪声; ②电荷转移时,电荷量波动产生的噪声; ③电荷读出时的噪声。 2
线性CCD简介
对CCD简介的叙述;看完瞬间明白、、、如果对你有用;给个高分吧、、 CCD,英文全称:Charge-coupled Device,中文全称:电荷耦合元件。可以称为CCD 图像传感器。CCD是一种半导体器件,能够把光学影像转化为数字信号。CCD上植入的微小光敏物质称作像素(Pixel)。一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。CCD的作用就像胶片一样,但它是把图像像素转换成数字信号。CCD上有许多排列整齐的电容,能感应光线,并将影像转变成数字信号。经由外部电路的控制,每个小电容能将其所带的电荷转给它相邻的电容。 CCD广泛应用在数码摄影、天文学,尤其是光学遥测技术、光学与频谱望远镜,和高速摄影技术如Lucky imaging。CCD在摄像机、数码相机和扫描仪中应用广泛,只不过摄像机中使用的是点阵CCD,即包括x、y两个方向用于摄取平面图像,而扫描仪中使用的是线性CCD,它只有x一个方向,y方向扫描由扫描仪的机械装置来完成。 CCD图像传感器可直接将光学信号转换为模拟电流信号,电流信号经过放大和模数转换,实现图像的获取、存储、传输、处理和复现。其显著特点是:1.体积小重量轻;2.功耗小,工作电压低,抗冲击与震动,性能稳定,寿命长;3.灵敏度高,噪声低,动态范围大;4.响应速度快,有自扫描功能,图像畸变小,无残像;5.应用超大规模集成电路工艺技术生产,像素集成度高,尺寸精确,商品化生产成本低。因此,许多采用光学方法测量外径的仪器, CCD从功能上可分为线阵CCD和面阵CCD两大类。线阵CCD通常将CCD内部电极分成数组,每组称为一相,并施加同样的时钟脉冲。所需相数由CCD芯片内部结构决定,结构相异的CCD可满足不同场合的使用要求。线阵CCD有单沟道和双沟道之分,其光敏区是MOS电容或光敏二极管结构,生产工艺相对较简单。它由光敏区阵列与移位寄存器扫描电路组成,特点是处理信息速度快,外围电路简单,易实现实时控制,但获取信息量小,不能处理复杂的图像(线阵CCD如右图所示)。面阵CCD的结构要复杂得多,它由很多光敏区排列成一个方阵,并以一定的形式连接成一个器件,获取信息量大,能处理复杂的图像。CCD结构及工作原理(来源于中国仪器超市)的资料:CCD结构包含感光二极管、并
CCD和CMOS简介
CCD:电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种 高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。 CMOS:互补性氧化金属半导体CMOS(Complementary Metal-Oxide Semiconductor)。CMOS的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N(带–电)和 P (带+电)级的半导体,这两个互补效应所产生的电流即可被处理芯片纪录和解读成影像。 技术对比: 从技术的角度比较,CCD与CMOS有如下四个方面的不同: 信息读取方式: CCD电荷耦合器存储的电荷信息,需在同步信号控制下一位一位地实施转移后读取,电荷信息转移和读取输出需要有时钟控制电路和三组不同的电源相配合,整个电路较为复杂。CMOS光电传感器经光电转换后直接产生电流(或电压)信号,信号读取十分简单。 速度: CCD电荷耦合器需在同步时钟的控制下,以行为单位一位一位地输出信息,速度较慢;而CMOS光电传感器采集光信号的同时就可以取出电信号,还能同时处理各单元的图像信息,速度比CCD电荷耦合器快很多。 电源及耗电量:
CCD电荷耦合器大多需要三组电源供电,耗电量较大;CMOS光电传感器只需使用一个电源,耗电量非常小,仅为CCD电荷耦合器的1/8到1/10,CMOS光电传感器在节能方面具有很大优势。 成相质量: CCD电荷耦合器制作技术起步早,技术成熟,采用PN结或二氧化硅(SiO2)隔离层隔离噪声,成像质量相对CMOS光电传感器有一定优势。由于CMOS光电传感器集成度高,各光电传感元件、电路之间距离很近,相互之间的光、电、磁干扰较严重,噪声对图像质量影响很大,使CMOS光电传感器很长一段时间无法进入实用。近年,随着CMOS电路消噪技术的不断发展,为生产高密度优质的CMOS 图像传感器提供了良好的条件。
CCD 参数介绍
CCD 参数介绍 CCD——光电隅合器件的英文缩写,很显然,这个概念来自于微电子技术领域,这是一种早期使用CdS光敏半导体材料制成的光电信号器件,它与早期的NP法和KIP法复印机所使用的感光鼓可谓同宗同源,三十年前,有谁曾想到小小的CCD会给光学带来如此惊人的变革? 今天,CCD几乎成了数字光学时代的一个代名词,是一切数码光学产品的核心器件,基于CCD线阵与面阵和驱动电路组成的CCD器件将传统光学送入了今天的数字光学时代。然而,严格意义地讲,CCD的发明和器件化与光学人没有多大关系,这让我想起激光器、彩色摄影,以及Adobe的图像处理软件的发明与出现都与光学人没多大关系,这些影响着现代光学仪器进程的技术都不是出自光学和光仪人自身的研究与创造,这一切,似乎足以让稍显刻板之气的光学人和号称工科“万精油”的光仪人汗颜。值得一提的是,在电子技术的应用领域最终又把“CCD”这个名词搞乱了,微电子技术领域有两种加工工艺可以生产CCD器件,分别是毫安级的TTL工艺和微安级的CMOS工艺,不知是电子技术应用人员,还是安防领域,还是数码相机领域,竟把CMOS工艺生产的CCD 叫成了CMOS,于是乎,便有了将TTL工艺的CCD叫CCD,CMOS工艺的CCD叫CMOS的混乱局面,“CCD有两种,CCD和CMOS”、“CMOS不是CCD”、“CMOS与CCD同时起步”——听得头疼,这是外话。 言归正传,那么,是不是安装了CCD图像器件的显微镜就是数码显微镜?这又是一个颇为“爱昧”的问题,可以说是,“严格意义说”又不是,CCD的驱动电路有两种:模拟信号与数字信号(以输出信号方式区分),数字信号的可直接接入计算机,模拟信号的需要经图像采集卡进行A/D转换而接入计算机,换句话说,不管是模拟CCD,还是数字CCD,都可使显微镜成为数码显微镜,然而,低端的数字CCD性能很差,高端数字CCD价格十分昂贵,使用受到局限,模拟CCD则不同,由于安防类产品的广泛应用,大批量生产降低了它的造价和提升了它的性能,同时,图像采集卡(又名图像卡)提供着十分优秀的图像处理能力和支持软件二次开发的特点,模拟信号(AV),还可直接接入监视器和电视机进行显示,十分方便,数字信号的则不能,因此,以模拟CCD图像器件为核心的CCD显微镜被广泛应用。 还有一个问题很多人理不清,数字CCD谈像素,模拟CCD谈线数(电视线)和桢数,像素是一个静止图像概念,线数则是一个动态图像概念,桢数:即为每秒钟内拍摄并传输的图像数量,超24桢/秒人眼无法分辨其间隔,就象电影(24幅/秒)与电视(30桢/秒),而CCD显微镜多为30桢/秒,可见数字CCD 多用于数码相机功能,模拟CCD多用于摄像机功能,模拟CCD可以通过图像采集卡转化为“多少像素/桢”的动态数字图像概念,值得一提的是,多半工厂技术人员搞不清楚上述的差异所在,并受国外高价器件供应的“概念营销”所影响,开口便谈CCD像素,好象CCD显微的效果就是像素决定一切,这显然是片面的理解,需要销售人员巧妙引开(SPIN话题)。 CCD器件有一个重要的硬件指标:“CCD靶面”英寸,所谓“CCD靶面
关于CCD参数dynamic range的详细介绍
dynamic - dynamic range 1 dynamic range of a CCD image sensor The dynamic range (dyn CCD ) is defined as the ratio of the maximum possible signal (full well capacity), ver-sus the total noise signal (in the dark). The data is ex-pressed in decibels [dB] or is dimensionless: dyn readout noise e fullwell capacity e CCD = --66@@ dyn 20log readout noise e fullwell capacity e dB CCD =$-c m 666@ @ @ The dynamic or dynamic range of a CCD-camera system is a widely used term to characterize the ability of a camera system to measure or image light/dark differences. In the field of photography, the dynamic range is analogous to the contrast range. However, each manufacturer defines dynamic range differently. A distinction must be made, between the “dynamic range of a CCD image sensor”, “dynamic range of an analog-to-digital-conversion” and “usable dynamic range”. an analog-to-digital (A/D) converter. Therefore, the light signals (photons) are converted into digital values. The analog-to-digital converters have a given resolution or dynamic range, that in most cases is given as a power of base 2, (2x). This means that an 8 bit resolution corresponds to 256 steps, which can be used to subdivide or convert the full scale voltage signal. CCD camera manufacturers usually optimize a combination of the dynamic range of the CCD image sensor, gain and conversion factor (defined as average conversion ratio that takes x electrons to generate one count in the image) to optimize the dynamic range of the CCD image sensor by the analog-to-digital converter. The dynamic range of the digitization is not identical to the usable dynamic range. parameter Sony ICX285AL Kodak KAI-1020Kodak KAI-11000fullwell capacity [e -]18 00040 00060 000readout noise [e -] 5 911dynamic range 3 600 : 1 4 444 : 1 5 454 : 1dynamic range [dB] 71.1 72.9 74.7 table 1: common CCD image sensor specifications Upon examination of these specifications, the ICX285 could be digitized using 4096 steps (corresponds to {212} 12 bit resolution), while the KAI-11000 should be digitized using 8192 steps (corresponds to 13 bit resolution). This references to maximum values which are explained in detail in the usable dynamic range section. Furthermore, additional gain makes sense only if the dynamic range of the A/D-converter is smaller than the dynamic range of the CCD image sensor. For example, if the dynamic range of the CCD is 70 dB, and the dynamic range of the A/D-converter is 48 dB, a useful gain or amplification would be 22 dB. Alternatively, a programmable gain would increase the performance of such a system. The resolutions above directly correspond to the theoretical maximum limit of the converter devices. Analog-to-digital converters have an average con-version uncertainty of 0.4 - 0.7 bit, which reduces the resolution for practical applications by 1 bit. If the camera system is not limited in its dynamic range by A/D converter discrepancies, it is useful to inflate the A/D converter resolution by 1 or 2 bits. This is achieved by electronically adding a minor amount to the signal a so-called offset signal, so that the lower limit is solely provided via the image sensor and read out amplifier noise, with some resolution sacrifices from the converter. resolution [bit]x => 2x dynamic range A/D conversion [digitizing steps]dynamic range A/D conversion [dB]825648.210 1 02460.212 4 09672.31416 38484.316 65 536 96.3 table 2: dynamic range of binary resolution 2 digitization or A/D conversion dynamic range Generated charge carriers are usually converted into voltage signals through an optimized read out circuit. These signals are amplified and finally digitized by
CCD简介
随着中国网络事业的发展(直接的说,电脑的外部环境的变化→宽带网络的普及),大家对电脑摄像头的需求也就慢慢的加强。比如用他来处理一些网络可视电话、视频监控、数码摄影和影音处理等。话说回来,由于其的相对价格比较低廉(数码摄象机、数码照相机),技术含量不是太高,所以生产的厂家也就多了起来,中国IT市场就是如此,产品的质量和指标也就有比较大的差距。 一、首先来看看感光材料 一般市场上的感光材料可以分为:CCD(电荷耦合)和CMOS(金属氧化物)两种。前一种的优点是成像像素高,清晰度高,色彩还原系数高,经常应用在高档次数码摄像机、数码照相机中,缺点是价格比较昂贵,耗功较大。后者缺点正好和前者互普,价格相对低廉,耗功也较小,但是,在成像方面要差一些。如果你是需要效果好点的话,那么你就选购CCD元件的,但是你需要的¥就多一点了! 二、像素也是一个关键指标 现在市面上主流产品像素一般在130万左右,早些时候也出了一些10-30万左右像素的产品,由于技术含量相对较低效果不是很好,不久就退出历史舞台了。这个时候也许有人会问,那是不是像素越高越好呢?从一般角度说是的。但是从另一个方面来看也就不是那么了,对于同一个画面来说,像素高的产品他的解析图象能力就更高,呵呵,那么你所需要的存储器的容量就要很大了。不然……我还是建议如果你选购的时候还是选购市面上比较主流的产品。毕竟将来如果出问题了保修也比较好。 三、分辨率是大家谈的比较多的问题 我想我没有必要到这里说分辨率这个东东了,大家最熟悉的应该就是: A:你的显示器什么什么品牌的。分辨率可以上到多高,刷新率呢? B:呵呵,还好了,我用在1024*768 ,设计的时候就用在1280*1024。玩游戏一般就800*600了。 但是摄像头的分辨率可不完全等同于显示器,切切的说,摄像头分辨率就是摄像头解析图象的能力。现在市面上较多的CMOS的一般在640*480,有是也会在800*600。但是如果是CCD的一般还要高些。 四、是摄像头,当然也要比较摄像的效果 摄像头的视频捕获能力是用户最关心的了,目前电脑摄像头所能够捕捉都是通过软件来实现的,因此对电脑要求比较高,一般情况下640*480他的速度可以到达30帧/S,但当分辨率在320*240的状态下,速度稍微一快点。因而,自己在选购是,可以按照自己的作用选择一个合适自己的。 五、镜头是一个大问题 估计这么东东很多用户在购买的时候会忽视掉,但这却是摄像头对光线的最重要部位。光圈的大小、镜头可调焦的范围等等。一般按照材料分主要有3中,有玻璃镜片;塑胶镜片和化合物的,这里最好的要算是玻璃的,他的通光系数大,一般好的镜头他的通光口径也会做的较大,在光线不是很好的时候也可以得到交好的效果,但是价格要高点(一分钱一分货)。塑胶的通光要差点,但是价格便宜,就这点也得到了一些中低端用户的认可。化合物的市面上不是很多,这里就不做详细介绍了。 六、其他数据 虽然说,现在的应用程序比较多,自己也比较好找,但是一个名牌产品,他里面的东西都很到位,通常会有拍照、摄像、影像文件管理、设置,有的摄像头带有MIR功能,那么软件方面还需要有音频方面的设置。 再来看看接口方面,以前的摄像头都是采用并口,但是随着技术的进步,慢慢的被USB的接口给取代了,这里千万提醒你一点,不要为了一点小利(¥)而放弃了USB接口的产品。毕竟并口退出历史舞台了。 小知识:摄像头的镜头最好的是玻璃镜头,最便宜的是塑料镜头,最常见的是塑料与玻璃的混合镜头。塑料镜头透光率低,常用于低端摄像头。主流的玻璃、塑料混合摄像头一般是由两片玻璃镜片和若干塑料镜片组成。全玻璃镜片通常有5片玻璃组成,透光率好。好的镜头镜片上会有镀膜以保证好的透光率。不过我们凭肉眼是不能判断出镜头是由几片玻璃或塑料镜片构成。 要想知道为什么厂家不能自己把镜头做大,我们还得先来了解下摄像头的内部结构。大部分去掉外壳的摄像头,内部都是一样的——由镜头、CMOS传感器、PCB板和DSP控制芯片组成(图4,有少数低价格摄像头的CMOS传感器和DSP控制芯片是整合的)。外面的景象通过镜头反映到CMOS上转换为电信号,经过A/D(模/数转换)转换为数字图像信号,再送到DSP控制芯片中加工处理,通过USB接口传输到电脑中,最后我们就可以看到图像了。
CCD参数简介
在搞清楚技术指标之前,要先搞清楚下列东西: 1.成像元件 也就是CCD啦!(当然也有C-MOS),主要区分为彩色,黑白,1/3”,1/4”, 1/2”及品牌, 尺寸: 大小的差别主要在于灵敏度,也就是最低照度,1/4照度会比1/3差,原理很简单:相同数量的感光点,摆在1/4上的每一点一定比较小点,他的受光就较少,当然照度就较差,好处是便宜一些,还有体积较小,板子可以做小一些. 2.像素: 在PAL制,有752(H) x 582(V),也就是所谓44万画素,及500(H) x 582(V) 也就是所谓25万画素, 在NTSC制,有768(H) x 494(V),也就是所谓38万画素,及510(H) x 492(V) 也就是所谓25万画素,44万画素,就叫高解,25万就叫低解,普解或中解.以上讲的画素是指”有效画素 3.分辩率: 这就比较好玩了,25万像素的摄像机,其技术极限大概是320条,在十多年前,台湾搞出了摄像机,大概就280-300条之间,但跟日本货比起来就差了一截,怎办?那就标350线好了,后来又有新公司及韩国搞出来了,大概在300左右,那就标380条好了,到了近几年,大陆也搞出来了,怎办?那就标420好了!,搞到现在,全部都标420了,无耻的还有标450 ,更让人搞不懂的是,不管在台湾或是大陆,送去检测,居然也是420?真让人匪夷所思! 而44万的,技术极限大概在480线,一般中,台,韩做出来大概就是400-450之间,同上理,就标480,500,520,550吧!各凭良心.还有,最近流行所谓520线的更是个大骗局,为什么他说520线?是因为主芯片用索尼HQ1(CXD3172AR),翻遍原厂资料,找不到520这个字,只有非官方说法:是有520线,但仅限Y/C输出.所以只要是HQ1方案,大家就标520,在加上灌水法,550及560就出来了,估计580也快有了. 4.最低照度: 最简单的定义:在暗房内,摄像机对着被测物,然后把灯光慢慢调暗,直到显示器上快要看不清楚被测物为止,这时量光线的照度, 就是最低照度.够含糊了吧!,实际上还得考虑用几毫米镜头,入光量多少,摄像机AGC必须关掉,视频讯号是降到多少IRE等等.几乎没有厂家会去做这种测试, 还有,高解CCD照度会比低解的差,还是老话,同样芯片面积,一个摆了44万点,一个摆了25万点,那个大点?
光谱仪用CCD介绍解读
光谱仪用CCD介绍(卓立汉光) CCD,是英文Charge Coupled Device 吹绾神詈掀骷乃跣矗窃贛OS晶体管电荷存储器的基础上发展起来的,最突出的特点是以电荷作为信号,而不是以电流或电压作为信号的。 在P型或N型硅 单晶的衬底上生长一层厚度约为 120~150nm的SiO2层,然后按一 定次序沉积m行n列个金属电极 或多晶硅电极作为栅极,栅极间 隙约2.5μm,于是每个电极与其 个MOS结构,这种结构再加上输 入、输出结构就构成了m×n位 CCD(m>1,n≥1);当n=1时,CCD 器件被称为线阵CCD;当n>1时, 则为面阵CCD。 CCD按受光方式 分为前感光和背感光两种。前感 光CCD由于正面布置着很多电极, 光经电极反射和散射,不仅使得 响应度大大减低(量子效率通常 低于50%),也因为多次反射产品 的干涉效应使光谱响应曲线出现 马鞍形的起伏;背感光CCD由于 避免了上述问题,因而响应度大 大提高,量子效率可达到80%以 上。(如图示) ● CCD的重要性能参数: ◆ 量子效率 量子效率是表征CCD芯片对不同波长的光信号的光电转换本领的高低,是CCD的一个重要参数。 ◆ 动态范围 一般定义动态范围是满阱容量与噪声的比值。增大动态范围的途径是降低暗电流和噪声,如采用制冷型CCD,或选择量子效率更高、像素尺寸更大的CCD。 ◆ 噪声 CCD的噪声包含信号噪声、读出噪声和热噪声。
1、信号噪声是指信号的随机噪声。 2、读出噪声是电荷转移时产生的噪声,它发生在每次电荷转移过程中,因此与读取的速度有关,读取速度越快,读出噪声也越高。 3、热噪声是温度引起的噪声,温度越低,热噪声越小。 ◆ 分辨率 面阵CCD的分辨率一般是指空间分辨率,它主要取决于CCD芯片的象元数和像素大小。 当CCD与光谱仪配合使用来进行光谱摄制时,其光谱分辨率则与光谱仪的光学色散能力以及CCD芯片的像素大小都有关系。 ◆ 线性度 线性度是表征CCD芯片中的不同像元对同一波长的输入信号,其输出信号强度与输入信号强度成比例变化的一致性。 ◆ 读出速度(帧数) 读出速度是用来表征单位时间内处理数据速度的快慢的参数。读出速度越快,单位时间内获得的信息越多;但同时要注意,读出速度越快,读出噪声越高。 ◆ 制冷方式 CCD的制冷方式主要有半导体(TE)制冷和液氮制冷。
CCD器件简介
CCD器件简介 前言 CCD,英文全称:Charge-coupled Device,中文全称:电荷耦合器件。CCD 是一种半导体器件,它利用光电转换原理把图像信息直接转换成电信号,这样便实现了非电量的电测量。同时它还具有体积小、重量轻、噪声低、自扫描、工作速度快、测量精度高、寿命长等诸多优点,因此受到人们的高度重视,在精密测量、非接触无损检测、文件扫描与航空遥感等领域中,发挥着重要的作用[1]。 CCD的发展历程 CCD是于1969年由美国贝尔实验室(Bell Labs)的维拉·博伊尔(Willard S. Boyle)和乔治·史密斯(George E. Smith)所发明的。当时贝尔实验室正在发展影像电话和半导体气泡式内存。将这两种新技术结合起来后,波义耳和史密斯得出一种装置,他们命名为“电荷‘气泡’元件”。这种装置的特性就是它能沿着一片半导体的表面传递电荷,便尝试用来做为记忆装置,当时只能从暂存器用“注入”电荷的方式输入记忆。但随即发现光电效应能使此种元件表面产生电荷,而组成数位影像。到了70年代,贝尔实验室的研究员已引能用简单的线
性装置捕捉影像,CCD就此诞生。有几家公司接续此一发明,着手进行进一步的研究,包括快捷半导体(Fairchild Semiconductor)、美国无线电公司(RCA)和德州仪器(Texas Instruments)。其中快捷半导体的产品率先上市,于1974年发表500单元的线性装置和100x100像素的平面装置。 自二十世纪80年代开始,摄影技术出现了革命性的突破, CCD得到广泛应用。目前,CCD技术已发展成一项具有广泛应用前景的新技术,成为现代光电子与测试技术中最受关注的研究热点之一。例如,在国防军事领域,CCD成像技术在微光、夜视、遥感应用中发挥着巨大的作用,适应了现代高技术战争的需求,成为军事微电子学的研究热门;在科研领域,由于其灵敏度高、噪声低,成为研究宏观(如天体)和微观(如生物细胞)现象不可缺少的工具;CCD具有成本低、小而轻的特点,在图像通信领域也获得了广泛的用途;在工程测量领域,CCD在工件尺寸测量、工件表面质量检测、物体热膨胀系数测量、光强分布测量等方面都有很好的应用。 器件特点 CCD的突出特点是以电荷作为信号,而不同大多数器件是以电流或者电压为信号。CCD的基本功能是电荷的储存和电荷的转移。因此,CCD工作过程的主要问题是信号电荷的产生、存储传输和检测。 CCD本身具有高分辨率、高灵敏度、像素位置信息强、结构紧凑及其有的特性密切相关。因此各种CCD器件广泛应用于军事、工业、商业医学、科研等领域。电荷耦合摄像器件是用于摄像或像敏的器件。简称为ICCD。它的功能是把二维光学图像信号转变为一维时序的视频信号输出。它有两大类型:线阵和面阵。二者都需要用光学成像系统将景物图像成在CCD的像敏面上。像敏面将照在每一像敏单元上的图像照度信号转变为少数载流子数密度信号存储于像敏单元(MOS电容)中。然后,再转移到CCD的位移寄存器(转移电极下的势阱)中,在驱动脉冲的作用下顺序地移出器件,成为视频信号。