第三章 船用气动仪表 第四节 气动调节器163
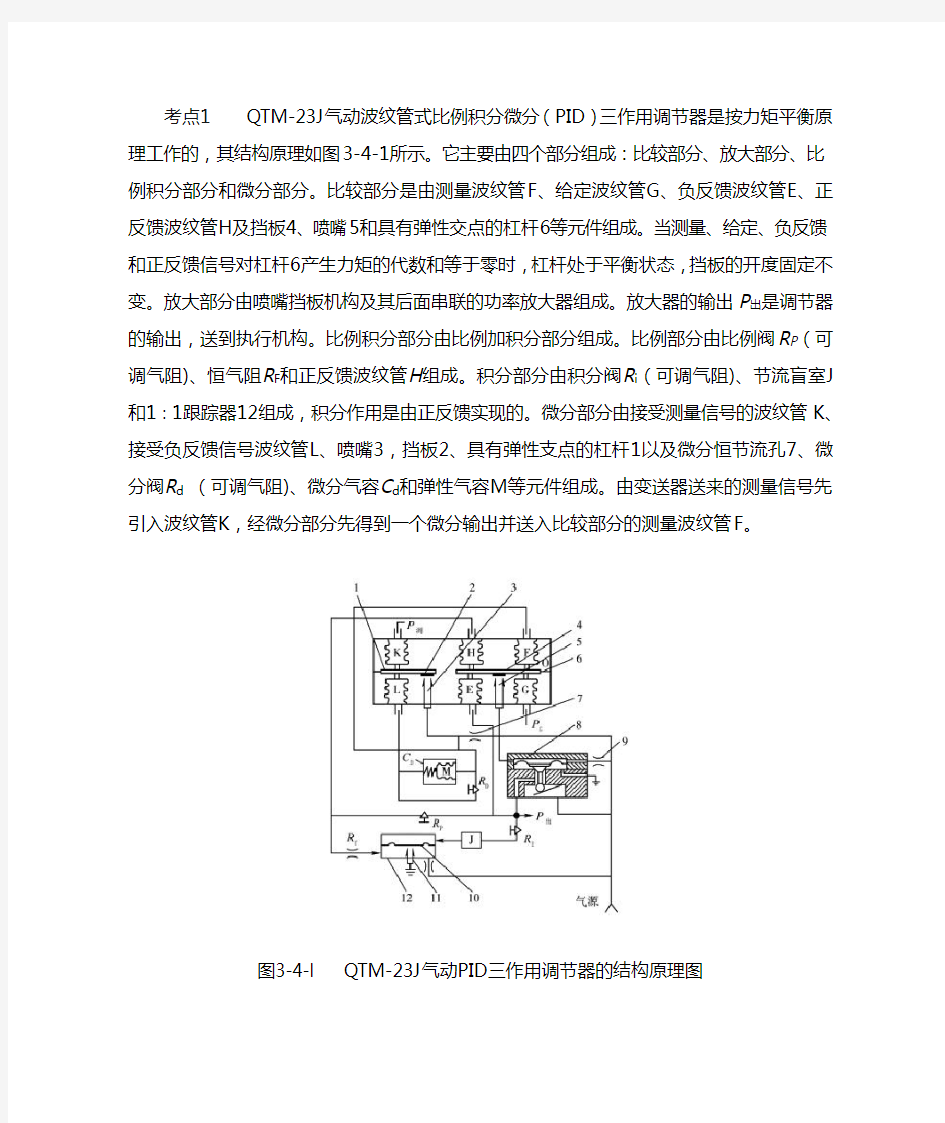
考点1 QTM-23J气动波纹管式比例积分微分(PID)三作用调节器是按力矩平衡原理工作的,其结构原理如图3-4-1所示。它主要由四个部分组成:比较部分、放大部分、比例积分部分和微分部分。比较部分是由测量波纹管F、给定波纹管G、负反馈波纹管E、正反馈波纹管H及挡板4、喷嘴5和具有弹性交点的杠杆6等元件组成。当测量、给定、负反馈和正反馈信号对杠杆6产生力矩的代数和等于零时,杠杆处于平衡状态,挡板的开度固定不变。放大部分由喷嘴挡板机构及其后面串联的功率放大器组成。放大器的输出P出是调节器的输出,送到执行机构。比例积分部分由比例加积分部分组成。比例部分由比例阀R P(可调气阻)、恒气阻R F和正反馈波纹管H组成。积分部分由积分阀R i(可调气阻)、节流盲室J和1∶1跟踪器12组成,积分作用是由正反馈实现的。微分部分由接受测量信号的波纹管K、接受负反馈信号波纹管L、喷嘴3,挡板2、具有弹性支点的杠杆1以及微分恒节流孔7、微分阀R d(可调气阻)、微分气容C d和弹性气容M等元件组成。由变送器送来的测量信号先引入波纹管K,经微分部分先得到一个微分输出并送入比较部分的测量波纹管F。
图3-4-l QTM-23J气动PID三作用调节器的结构原理图
l、6-平衡杠杆;2、4-挡板;3、5-喷嘴;7、9-恒节流孔;
8-放大器;10-膜片;11-喷嘴;12-1:1跟踪器该调节器的工作过程是:假定在初始平衡状态的基础上,被控参数升高,经变送器输出的测量信号P测增大了ΔP,挡板2靠近喷嘴3,喷嘴背压瞬间增加,这个增大的信号分三路:一路直接送入比较部分的测量波纹管F,使挡板4靠近喷嘴5,喷嘴背压升高,经放大器放大,调节器输出信号瞬间增大;二路经弹性气容M 挤压微分气室C d的空气,使波纹管L中的气压信号瞬间增加,限制挡板2继续靠近喷嘴3。当波纹管K和L中的气压信号对杠杆1 产生的力矩与系统的弹性力矩的代数和等于零时,杠杆1瞬间达到暂时的平衡。此时微分部分输出的信号最大,相应于调节器的输出信号也是最大的;三路经微分阀R d不断向波纹管L充气,这就破坏了杠杆1的暂时平衡使挡板2不断离开喷嘴3,测量波纹管F接受的测量信号随之减小。这就是微分输出的消失过程。当波纹管L的气压信号增加到与波纹管K
相同时,杠杆l又处在新的平衡状态,其微分输出就是ΔP。可见微分部分是比例带为100%的比例微分环节(微分器),它输出一个超前的控制信号。改变微分阀R d的开度可以调整微分时间,关小微分阀,微分时间长,微分作用强;反之,微分作用弱。
测量波纹管F接受微分部分输出的超前控制信号,破坏了杠杆6的初始平衡状态,挡板4靠近喷嘴5使调节器的输出信号增大。这个增大的输出信号分四路。一路送到执行机构,控制调节阀的开度。二路直接送入负反馈波纹管E,限制挡板继续靠近喷嘴。三路经比例阀R P、恒气阻R F及正反馈波纹管组成的节流分压器送入正反馈波纹管H。显然调整比例阀的开度可以调整进入波纹管H的气压信号大小。当波纹管F、G、E、H所接受的信号对杠杆6产生的力矩与系统的弹性力矩的代数和等于零时,杠杆6处于暂时的平衡状态。此时调节器的输出P出与测量波纹管接受的气压信号P F,成正比,这就是比例作用规律。开大比例阀R P可加强正反馈,使比例作用强,即减少小比例带;反之比例带大。四路调节器的输出P出经积分阀向盲室J充气,1∶1跟踪器膜片10上面的气压信号随时间按指数函数增加,挡板10不断靠近喷嘴11,使由气源来的气体经喷嘴11排入大气量减少, 1∶1跟踪器经恒气阻R F输出的信号不断增加(1∶1跟踪器膜片下面的压力始终跟踪膜片上面的压力变化)。因此,正反馈波纹管H在比例输出的基础上,其压力信号又逐渐增加,挡板4又逐渐靠近喷嘴,使调节器的输出P出又不断增加,这就是积分部分的输出。显然,改变积分阀的开度可以调整积分时间,积分阀开大积分时间短,积分作用强;反之,积分作用弱。
比较部分最后平衡时,P H =P E =P出,因此经调节器的控制作用,测量值P F必定要回到给定值P G,即P F=P G,可见积分作用能消除静差,实现无差控制。
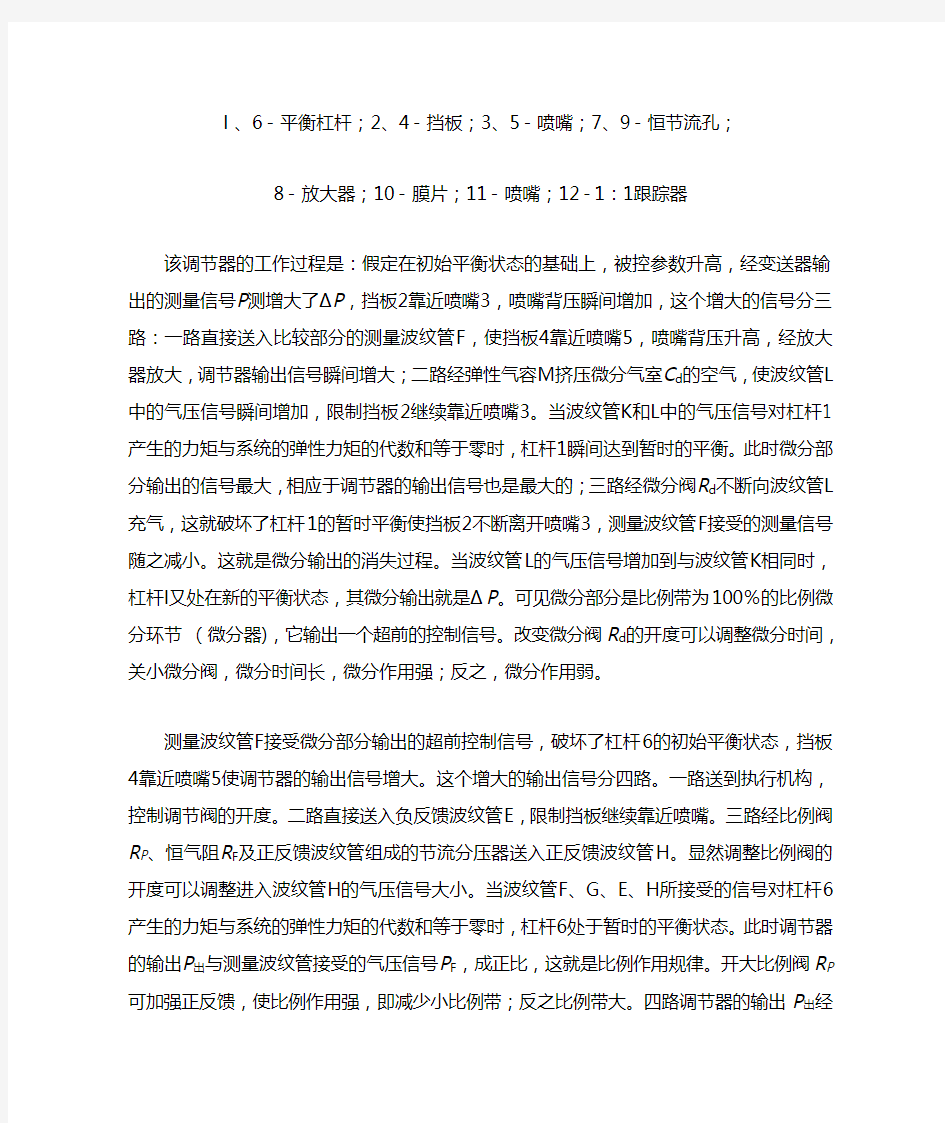
考点2 M58型调节器是通用型的比例积分微分发调节器,其结构原理如图3-4-2所示。在浮动环3的下面,对称放着四个波纹管,其中,给定波纹管5和测量波纹管12为一组,负反馈波纹管11和正反馈波纹管4为另一组,两组波纹管同时作用在浮动环3上。浮动环既作为力矩的比较机构,又作为挡板,浮动环3上有一比例带调带杆13,作为浮动环偏转的支点。比例带调整杆固定在比例带调整杆轴上,可以沿该轴转动以改变支点的位置,调整比例带的大小。同时,在比例带调整杆轴上装有一个圆形板,用它固定比例带调节杆轴、喷嘴及比例带盘。另外调节器下面装有放大器、积分气室和针阀、微分气室和针阀,还有正、反作用切换板,等等。
如果让微分阀和积分阀均有一定开度,即可实现比例积分微分作用。这时,若测量信号P5增大,浮动环偏转,挡板靠近喷嘴,调节器输出P出增大。在P出增大的瞬间来不及经微分阀向微分气室充气。而微分气室中的波纹管内压力会突然增大,使其伸长压缩微分气室,其压力略有增大送至负反馈波纹管11,由于P11增加量很小,它所产生的负反馈力矩,远远小于测量力矩,挡板会大大靠近喷嘴,调节器的输出P出会大大增大,这就是微分输出的过程。随着时间的增长,P出经微分阀不断向微分气室充气,使之送人反馈波纹管压力P11不断增大,其负反馈力矩不断增大,又会使挡板逐渐离开喷嘴,调节器的输出P出会不断下降,这是微分输出的消失过程,当微分气室中的压力,即负反馈波纹管压力P11=P出时,调节器达到一个暂时的平衡,这时P出就与偏差成比例。同时微分气室输出的压力信号经积分
阀9,不断向积分气室10充气,其压力不断增加,正反馈波纹管4内的压力增大,又会使挡板靠近喷嘴,使P出又略有些增大,以此来消除静态偏差。这一附加的正反馈实现了积分作用。可见,开大积分阀,积分时间T i小,积分作用强,关小积分阀,积分时间T i长,积分作用弱。调整微分作用强弱是通过调整微分阀7的开度来实现的。开大微分阀,微分时间T d短,微分作用弱,关小微分阀,微分时间T
长,微分作用强。
d
正、反作用切换是通过切换板6实现的。对于正作用式,波纹管5接测量信号,波纹管12接调定的给定值。这时,切换板6处于B位。若把切换板6转一个90°角至A位,则波纹管12接测量信号,波纹管5接调定的给定值,调节器就成为反作用式调节器。
图3-4-2 M58型气动调节器结构原理图
1-放大器;2-喷嘴;3-浮动环;4-正反馈波纹管;5-测量波纹管(B)
或给定波纹管(A);6-正、反作用切换板;7-微分阀;8-微分气室;
9-积分阀;10-积分气室;11-负反馈波纹管;12-给定波纹管(B) 或测量波纹管(A);13-比例带调整杆;14-比例带盘
考点3 NAKAKITA型黏度调节器是按位移平衡原理工作的。能实现PID控制作用,其结构原理如图3-4-4所示。
在初始平衡状态下,燃油黏度测量值与给定值相等,黑色的测量指针与红色的给定指针重合。喷嘴挡板之间的开度不变,调节器有一个稳定的输出。比例波纹管、积分波纹管、积分气室及微分气室压力都相等,并等于调节器的输出压力。
图3-4-4 NAKAKITA型粘度调节器结构原理图
当系统受到扰动时,燃油黏度的测量值会离开给定值出现偏差。假定燃油黏度增大,差压变送器输出一个与之成比例的增大的气压信号,并经控制板送人弹簧管,弹簧管张开,GH杆经FG杆推动向上移动。以E轴,HEN杆和HED杆均逆时针转动,它一方面使MN杆右移,使黑色测量指针绕轴Q′向指示黏度增大的方向转动;另一方面,由于D点右移,使AC杆绕C轴逆时针转动。BO′杆右移,OO′杆以O为支点顺时针转动,挡板离开喷嘴,喷嘴背压下降,经气动功率放大器使调节器输出压力降低(这是反作用式调节器)。这一降低的压力信号分四路。一路是送人气关式调节阀,开大蒸汽调节阀使燃油黏度降下来。二路是与微分气室中的波纹管相通,波纹管收缩,波纹管外面的气室压力略有降低,则比例波纹管的压力略有降低。OO′杆略有下移,使挡板稍微靠近一点喷嘴。这一负反馈很弱,不足以抵制挡板继续离开喷嘴,调节器的输出会大大降低,调节阀开度很大,这就是调节器的微分输出,三路是调节器的输出经微分阀与微分气室相通,微分气室压力经微分阀不断向压力降低的P出放气,其压力不断降低,比例波纹管的压力不断降低,OO′杆不断下移,负反馈作用不断加强,挡板不断靠近喷嘴,调节器的输出信号不断增大。这是微分输出的消失过程,当测量信号使挡板离开喷嘴位移量与负反馈信号使挡板靠近喷嘴的位移量相平衡时,微分输出就消失在比例输出上。可见,微分作用是由弹性气室组成的比例惯性环节的负反馈实现的。四路是积分波纹管的压力不断经积分阀放气而降低,OO′杆上移,使挡板又逐渐离开一点喷嘴,这一附加的正反馈使调节器输出P出压力有所降低,再略开大一点蒸汽调节阀,用来消除静态偏差使燃油黏度恢复到给定值,最终黑、红指针再次重合。
在调节器上有三个调整盘,分别用来调整比例带、积分时间和微分时间,改
变积分阀和微分阀的开度可分别调整积分时间和微分时间,开大积分阀,关小微分阀,可缩短积分时间,增加微分时间,其积分作用和微分作用都加强,反之亦然。比例带调整盘是一个偏心机构,转动比例带调整盘可平行移动喷嘴挡板机构,这样挡板转动相同的角度,则喷嘴与挡板之间的开度变化量不同。
调整给定值是通过转动给定值旋钮实现的。若增大给定值,可顺时针转动给定值旋钮。一方面红色指针向给定值增大的方向转动;另一方面,QS杆将绕Q轴逆时针转动,RC杆左移。这时由于黏度的测量值暂时未变,A和D点不动,故BO′杆左移,挡板靠近喷嘴,调节器输出压力增大,这与黏度低于给定值的效果是一样的,经调节器PID的控制作用,关小蒸汽调节阀使燃油黏度逐渐升高并最终稳定在新的给定值上,即黑色测量指针不断向黏度增大方向转动,最后与红色给定指针重合。
考点4 1.经验法
经验法又叫现场凑试法,即先确定一个调节器的参数值PB和T i通过改变给定值对控制系统施加一个扰动,现场观察判断控制曲线形状。若曲线不够理想,可改变PB或T i,再画控制过程曲线,经反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和T i就是最佳值。如果调节器是PID三作用式的,那么要在整定好PB和T i的基础上加进微分作用。由于微分作用有抵制偏差变化的能力,所以确定一个T d,值后,可把整定好的PB和T i值减小一点再进行现场凑时,直到PB、T
和T d取得最佳值为止。显然用经验法整定的参数试,直到PB、T i和T d取得最佳值i
为止。显然用经验法整定的参数是准确的。但花时间较多。
2.衰减曲线法
衰减曲线法是以4∶1的衰减比作为整定要求的,先切除调节器的积分和微发作用,用凑试法整定纯比例控制作用的比例带PB(比同时凑试两个或三个参数要简单得多),使之符合4∶1衰减比的要求,记下此时的比例带PB S,和振荡周期T s。如果加进积分和微分作用,可按表3-4-1给出的经验公式进行计算。若按这种方式整定的参数在运行过程中,其动态过程曲线还不够理想,再根据曲线形状,对整定的参数作适当的调整。对有些控制对象,控制过程进行较快,难以从记录曲线上找出衰减比。这时,只要被控量波动2次就能达到稳定状态,可近似认为是4∶1的衰减过程,其波动一次时间即为T s。
表3-4-1 衰减曲线法经验公式表
3.临界比例带法
用临界比例带法整定调节器参数时,先要切除积分和微分作用,让控制系统以较大的比例带,在纯比例控制作用下运行,然后逐渐减小PB,每减小一次都要认真观察过程曲线,直到达到等幅振荡时,记下此时的比例带PB K;(称为临界比例带)
和波动周期T K,然后按表3-4-2给出的经验公式求出调节器的参数值:按该表算出的参数值后,要把比例带放在比计算值稍大一点的值上,把T i和T d放在计算值上,进行现场运行观察,如果比例带可以减小,再将PB放在计算值上。
表3-4-2 临界比例带法经验公式表
这种方法简单,应用比较广泛。但对PB K很小的控制系统不适用,对被控参数不允许震荡的系统也不适用。
4.反应曲线法
前三种整定调节器参数的方法,都是在预先不知道控制对象特性的情况下进行的。如果知道控制对象的特性参数,即时间常数T、时间迟延τ和放大系数K,则可按表3-4-3给出的经验公式计算出调节器的参数。利用这种方法整定的结果可达到衰减率υ=0.75的要求。
表中公式只适用于有自平衡能力的控制对象。
表3-4-3 反应曲线法经验公式表
D1.减小调节器的PB和T i,错误的理解是()。
A.控制作用增强
B.过程稳定性下降
C.最大动态偏差减小
D.控制作用减弱
D2.在QTM-23J型调节器中,节流分压器和节流盲室的反馈性质分别是()。A.正反馈,负反馈
B.负反馈,正反馈
C.负反馈,负反馈
D.正反馈,正反馈
C3.由比例调节器组成的定值控制系统,在保证正常工作的前提下,PB越大,其
给定值的可调范围()。
A.不受影响
B.在量程范围内均可
C.变大
D.变小
A4. QTM-23J调节器构成的反馈控制系统中,受扰动后测量指针绕给定指针长时间波动,应当()。
A.↑PB,↑T i,↓T d
B.↓PB,↓T i,↓T d
C.↑PB,↓T i,↑T d
D.↓PB,↑T i,↑T d
A5.在柴油机冷却水温度控制系统中,调节器为PID型,通常比例带为()。A.20~60%
B.30~70%
C.40~100%
D.20~80%
A6.气动仪表中整定PB, T i, T d的节流阀采用非刚性连接的目的是()。A.保持阀特性
B.便于拆装
C.使用方便
D.动作灵活
B7. QTM-23J调节器设置1∶1跟踪器的目的不在于()。
A.信号隔离
B.功率放大
C.提供分压通道
D.防止调节器产生振荡
D8. QTM-23J调节器设置1∶1跟踪器的目的是()。
A.功率放大
B.提高PB和T i的范围
C.为节流盲室提供负反馈
D.防止调节器产生振荡
A9.在PID控制系统中,不能克服的变化量为()。
A.干扰量
B.输出量
C.输入量
D.扰动量
C10.调节器的参数整定应根据被控对象特性而定,一般的选择是()。
A.对象时间常数小,比例带宜小,积分时间宜大,需加微分作用
B.对象时间常数大,比例带宜大,积分时间宜小,不需加微分作用
C.对象时间常数小,比例带宜大,积分时间宜小,不需加微分作用
D.对象时间常数大,比例带宜小,积分时间宜大,不需加微分作用
C11.用PI调节其组成的控制系统中,多容控制对象比单容控制对象的控制系统其PB和T i整定在()。
A.PB↑, T i↑
B.PB↓, T i↓
C.PB↓, T i↑
D.PB↑, T i↓
A12.增大调节器的PB和T i对控制过程的影响,错误认识是()。
A.控制作用增强
B.控制过程稳定
C.控制作用减弱
D.最大动态偏差增大
D13.整定调节器的PB和T i,错误的认识是()。
A.PB和T i增大都意味着控制作用减弱
B.PB和T i减小都意味着控制作用增强
C.PB影响比T i大,PB整定准确一些
D.T i影响比PB大,T i整定准确一些
B`14.采用PID调节器的温度控制系统,选用的T i和T d时间范围是:
A.0.1~1和0.5~3 min
B.3~10和0.5~3 min
C.0.4~2和0.5~3 min
D.1~3和0.1~0.5 min
D15.调整PB,T i和T d的节流阀通常采用:
A.针阀结构
B.球阀结构
C.蝶阀结构
D.A+B
C16.在QTM-23J型气动调节器中,若负反馈波纹管接头漏气,则调节器将()。A.切除比例作用
B.比例带PB会大大增大
C.比例带会大大减小
D.积分作用会大大加强
C17.在QTM-23J型气动调节器组成的控制系统中,若积分阀堵塞,则系统()。A.动态过程振荡激烈
B.最大动态偏差明显增大
C.受到扰动后,稳态时存在静态偏差
D.振荡次数会增加
D18.在QTM-23J型气动调节器中,其比例积分作用实现方法是()。
A.节流通室的正反馈,节流盲室的正反馈
B.节流通室的正反馈,节流盲室的负反馈
C.节流通室的负反馈,节流盲室的负反馈
D.比例环节的负反馈,节流盲室的正反馈
A19.在QTM-23J型气动调节器切除微分后组成的锅炉水位控制系统中,当水位升高时,调节器输出将(),给水调节阀是(),其调节阀开度()。
A.增大,气关式,减小
B.减小,气关式,减小
C.增大,气开式,开大
D.减小,气开式,开大
D20.气动仪表中整定PB, T i, T d的节流阀采用非刚性连接的目的不是()。A.自动对中
B.保持阀特性
C.防止压坏阀面,阀座
D.便于拆装
A21.在用QTM-23J型气动PID调节器组成的控制系统中,为使系统稳定性提高,其调整方法为()。
①开大比例阀②关小比例阀③开大积分阀④关小积分阀⑤开大微分阀⑥关小微分阀
A.②④⑤
B.①②③
C.②③⑤
D.①④⑥
A22.在M58型气动调节器中,浮动环上的作用力矩如图3-4-3所示,当把比例带调节杆转到与正、负反馈波纹管中心线重合时,其PB为()。
图3-4-3
A.0
B.10%
C.500%
D.无穷大
A23.在M58型气动调节器中,浮动环上的作用力矩如图3-4-3所示,其中4、5、11、12是对称布置的4个波纹管,若调节器为正作用式,则节流盲室输出应接在()。
图3-4-3
A.波纹管4
B.波纹管5
C.波纹管11
D.波纹管12
C24.在M58型气动调节器中,在浮动环上作用4个有效面积与刚度均相等的波纹管,这4个波纹管的布置应该是()。
A.测量与给定波纹管互成90°
B.正、负反馈波纹管互成90°
C.测量与正反馈波纹管互成90°
D.比例带不同,各波纹管位置改变
A25.在M58型气动调节器中,在比例带调整轴上装有一块圆形板,其作用是()。A.固定喷嘴
B.固定挡板
C.调整微分时间
D.调整积分时间
C26.在M58型气动调节器中,浮动环的作用是()。
A.作为气动功率放大器
B.固定喷嘴
C.调整比例带
D.进行正、反作用切换
B27.在采用M58型气动调节器组成锅炉水位控制系统时,为使系统受到扰动后,被控量最终能稳定在给定值上,必须使()。
A.全关微分阀
B.全开微分阀
C.全关积分阀
D.全开积分阀
A28.在M58型气动调节器中,为切除微分,积分作用成为纯比例调节器,应()。A.全关积分阀,全开微分阀
B.全关积分阀,全关微分阀
C.全开积分阀,全开微分阀
D.全开积分阀,全关微分阀
C29.一个比例调节器,当比例带减小时,其调节阀开度可调范围()。
A.增大
B.减小
C.不变
D.任意
D30. M58型气动调节器是属于()作用规律的调节器。
A.比例
B.比例积分
C.比例微分
D.比例积分微分
A31.在用QTM-23J型气动调节器组成的控制系统中,若积分阀堵塞,系统可能会出现()。
A.存在静态偏差
B.最大动态偏差明显增大
C.最大动态偏差明显减小
D.系统稳定性会变坏
B32.在用QTM-23J型气动PID调节器组成的控制系统中,调节器输出P出始终小于或等于0.02 MPa,其不可能的原因是()。
①喷嘴堵塞②恒节流孔堵塞③给定波纹管破裂④测量波纹管破裂⑤积分阀关死⑥气源中断
A.①②③⑤
B.①③⑤⑥
C.②③④⑥
D.②③④⑤
C33.在用QTM-23J型气动PID调节器组成的控制系统中,调节器的输出P出始终大于或等于0.1 MPa,其不可能原因是()。
①喷嘴挡板机构中的喷嘴堵塞②通负反馈波纹管的恒节流孔堵塞③喷嘴挡板机构中的恒节流孔堵塞④通正反馈波纹管的恒节流孔堵塞⑤给定波纹管破漏⑥测量波纹管破漏
A.①②③⑤
B.③④⑤⑥
C.②③④⑥
D.②③④⑤
D34. F、G、E、H分别为QTM-23J型气动P ID调节器比较部分的测量、给定、负反馈和正反馈波纹管,系统受到扰动后, P F>P G,在调节器控制下,达到稳态时()。
①P F>P G②P E>P H③P H>P E④P F=P E⑤P E=P H⑥P G =P F
A.①②③
B.①③⑥
C.②④⑤
D.④⑤⑥
B35. QTM-23J型气动PID调节器其输出分别接()。
①1∶1负反馈波纹管②经节流分压器接正反馈波纹管③经节流阀接积分气室④经节流阀接弹性气室⑤接执行机构⑥经A/D转换器援数字仪表
A.②③⑤⑥
B.①②③⑤
C.③④⑤⑥
D.①③④⑤
C36. QTM-23J型气动调节器所具有的调节规律是()。
①正作用②比例③反作用④微分⑤积分⑥气开式
A.①③⑥
B.③⑤⑥
C.②④⑤
D.①③④
A37.在QTM-23J型气动PID调节器中,三个参数调节旋钮分别为()调节旋钮。
①比例带②给定值③积分时间④输出值⑤测量值⑥微分时间
A.①③⑥
B.②③⑤
C.③④⑤
D.①③④
B38.在QTM-23J型PID调节器中,节流分压得分压系数为()。
A.R p/(R p+R f)
B.R f/(R p+R f)
C.R f·R/(R p+R f)
D.R p/(R p·R f)
D39.由比例调节器组成的定值控制系统,在保证正常控制的前提下,PB越小,其给定值可调范围()。
A.不受影响
B.在量程范围内均可
C.变大
D.变小
C40. M58型气动调节器的工作原理及可调参数为()。
A.基于位移平衡原理,PB
B.基于力平衡原理,PB,T i
C.基于力矩平衡原理,PB,T i,T d
D.基于动平衡原理,T d,T i
A41.在QTM-23J型调节器中,若积分调节阀堵塞,此时调节器的功能为()。A.PD
B.PI
C.P
D.PID
C42.在充有硅油的膜盒中,发生单方向过载时,则过大的作用力由()承担。A.高压侧膜片
B.硬芯
C.膜盒基座
D.低压侧膜片
D43. PID调节器,当T i和T d增加时,说明()。
A.积分作用强,微分作用弱
B.积分作用弱,微分作用弱
C.积分作用强,微分作用强
D.积分作用弱,微分作用强
C44.理想微分调节器输出的变化与()成正比。
A.偏差的大小
B.给定值的大小
C.偏差的变化速度
D.偏差对时间的积分
B45.在PB =100% 的PI调节器中,其输入为单位阶跃信号时,积分时间为积分输出达到()的时候所需的时间。
A.2
B.1
C.3
D.4
A46.在PID调节器中,要使其成为PI,PD或P调节器,则分别应使()。
A.T d =0 T i =∞T d =0 T i =∞
B.T d =0 T i =∞T d =0 T i =0
C.T d =0 T i =0 T d =0 T i =∞
D.T d =∞T i =∞T d =0 T i =0
A47.对PID调节器,为切除积分和微分作用成为纯比例调节器,应进行的操作是:A.全关积分阀,全开微分阀
B.全关积分阀,全关微分阀
C.全开积分阀,全开微分阀
D.全开积分阀,全关微分阀
B48. QTM-23J型调节器的比例阀,当开度增大时,调节器的负反馈作用和比例带分别()。
A.增强,增大
B.减弱,减小
C.减弱,增大
D.增强,减小
D49.在用QTM-23J型气动调节器组成燃油黏度控制系统中,所采用的调节阀应该是()。
A.正作用式的
B.反作用式的
C.气关式调节阀
D.气开式调节阀
C50.在QTM-23J型PID调节器中,若关小积分阀,则调节器的()。
A.积分作用增强,积分时间增长
B.积分作用增强,积分时间减短
C.积分作用减弱,积分时间增长
D.积分作用减弱,积分时间减短
D51.在QTM-23J型比例调节器中,气动放大器的输出共分几路?
A.1路
B.2路
C.3路
D.4路
C52.在采用QTM-23J为调节器的控制系统中,当静态偏差为零时,正、负反馈波纹管内压力P H和P E应为()。
A.P H>P E
B.P H<P E
C.P H=P E
D.P H·P E=1
A53.在QTM-23J型调节器中,若突然减小给定值,若实际值保持不变,则调节器的输出为()。
A.先阶跃增大,然后随时间增加
B.先有一个较大的阶跃增大,再随时间逐渐减小
C.先阶跃减小,然后随时间减小
D.先有一个较大就阶跃减小,再随时间逐渐增大
D54.在QTM-23J型PID调节器组成的系统中,若全开积分阀,则系统()。A.存在静差
B.系统稳定性好
C.过渡过程时间短
D.系统振荡不息
B55.在气动PID调节器中,实现积分作用的方法是()。
A.节流分压器的负反馈
B.节流盲室的正反馈
C.弹性气室的负反馈
D.1∶1跟踪器的负反馈
A56.在QTM-23J型气动调节器是根据()平衡原理工作的。
A.力矩
B.杠杆
C.平衡力
D.直线位移
D57.在QTM-23J型比例调节器中,1∶1跟踪器错误的理解是()。
A.起信号隔离作用
B.提供节流分压器分压通道
C.输出始终等于输入
D.为积分提供负反馈通道
D58.在QTM-23J型比例调节器中,1∶1跟踪器的主要作用是()。
A.1∶1放大
B.1∶1跟踪
C.阻尼
D.隔离
C59.在QTM-23J型调节器中,其工作原理及作用方式分别为()。
A.力平衡原理,正作用方式
B.位移平衡原理,反作用式
C.力矩平衡原理,正作用方式
D.位移平衡原理,正作用式
A60.在QTM-23J型调节器中若关小比例阀,则()。
A.负反馈作用强,比例作用弱
B.负反馈作用弱,比例作用强
C.负反馈作用强,比例作用强
D.负反馈作用弱,比例作用弱
C61.在QTM-23J型气动调节器中,现要切除积分作用,且增强比例作用,其调整的方法是()。
A.全开积分阀,开大比例阀
B.全开积分阀,关小比例阀
C.全关积分阀,开大比例阀
D.全关积分阀,关小比例阀
C62.在M58型气动调节器中,若调节器为反作用式,则测量信号和给定信号分别接在()。
A.波纹管4,波纹管11
B.波纹管11,波纹管4
C.波纹管12,波纹管5
D.波纹管5,波纹管12
C63.在用QTM-23J型气动调节器组成的控制系统中,若比例阀堵塞,则系统可能出现的现象是()。
A.存在静态偏差
B.系统稳定性会变差
C.最大动态偏差明显增大
D.最大动态偏差明显减小
B64.QTM-23J型气动调节器是属于(),当测量信号P测增大时,挡板2喷嘴3()。A.正作用式,离开
B.正作用式,靠近
C.反作用式,离开
D.反作用式,靠近
A65.在QTM-23J型气动调节器组成的温度控制系统中,系统受到扰动后,测量指针经多次振荡后,最终稳定在给定值上,首先应调整()。
A.关小积分阀使T i↑
B.开大比例阀使PB↓
C.开大积分阀使T i↓
D.关小比例阀使PB↑
B66.在用QTM-23J型气动调节器组成的温度控制系统中,系统受到扰动后,其测量指针无波动的向给定指针靠近,最后稳定在给定值上,首先应调整()。A.关小积分阀使T i↑
B.开大比例阀使PB↓
C.开大积分阀使T i↓
D.关小比例阀使PB↑
D67.在用QTM-23J型气动调节器组成的温度控制系统中,若温度给定值为65℃,
系统受到扰动后,温度表测量指针经多次振荡最终稳定在68℃,其可能的原因是()。
A.比例阀、积分阀、微分阀均开得太大
B.比例阀、积分阀、微分阀均开得太小
C.比例阀开得太大,积分阀已全关,微分阀开的太小
D.比例阀开得太小,积分阀和微分阀已全开
D68.在QTM-23J型气动调节器中,若喷嘴5堵塞,则调节器的输出P出为()。A.P出≌ 0
B.P出 =0.02 MPa
C.P出 =0.06 MPa
D.P出=0.1 MPa
A69.在QTM-23J型气动调节器中,若喷嘴挡板机构恒节流孔9堵塞,则调节器的输出P出为()。
A.P出≌ 0
B.P出 =0.02 MPa
C.P出 =0.06 MPa
D.P出=1.0 MPa
B70.在气动调节器中,引入一个节流分压器作为反馈气路,这调节器能获得()。
A.PI调节作用规律
B.P调节作用规律
C.PID调节作用规律
D.PD调节作用规律
C71.在QTM-23J型气动调节器中,1∶1跟踪器的作用是()。
A.对信号进行流量放大
B.作为积分气室
C.提供分压通道
D.便于调零
C72.在QTM-23J型调节器中,若突然增大给定值,若实际值保持不变,则调节器的输出为()。
A.先阶跃增大,然后随着时间增加
B.先有一个较大的阶跃增大,在随时间逐渐减小
C.先阶跃减小,然后随着时间减小
D.先有一个较大的阶跃减小,在随时间逐渐增大
C73.在Q T M-23J型气动调节器中,若开大积分阀R i,则()。
A.正反馈作用强,积分作用强T i↓
B.正反馈作用强,积分作用弱T i↑
C.正反馈作用弱,积分作用强T i↓
D.正反馈作用弱,积分作用强T i↑
B74. QTM-23J型气动调节器是属于()。
A.比例调节器
B.比例积分微分调节器
C.比例微分调节器
D.比例积分调节器
A75.QTM-23J型调节器的比例阀,当开度减小时,调节器的负反馈作用和比例带分别()。
A.增强,增大
B.减弱,减小
C.减弱,增大
D.增强,减小
B76.在QTM-23J型调节器中若开大比例阀,则()。
A.负反馈作用强,比例作用弱
B.负反馈作用弱,比例作用强
C.负反馈作用强,比例作用强
D.负反馈作用弱,比例作用弱
B77.在QTM-23J型PID调节器中,若开大积分阀,则调节器的()。
A.积分作用增强,积分时间增长
B.积分作用增强,积分时间减短
C.积分作用减弱,积分时间增长
D.积分作用减弱,积分时间减短
A78.在QTM-23J型调节器中,()。
A.正反馈使挡板靠近喷嘴,负反馈使挡板离开喷嘴
B.正反馈使挡板靠近喷嘴,负反馈使挡板靠近喷嘴
C.正反馈使挡板离开喷嘴,负反馈使挡板靠近喷嘴
D.正反馈使挡板离开喷嘴,负反馈使挡板离开喷嘴
D79.在采用QTM-23J为调节器的控制系统中,当静态偏差为零时,正、负反馈波纹管内压力P H、P E以及给定、测量波纹管压力P G、P F应为()。
A.P H>P E,P G>P F
B.P H<P E,P G>P F
C.P H=P E,P G>P F
D.P H=P E,P G=P F
C80.在QTM-23J型气动调节器中,若比例阀堵塞,则调节器()。
A.切除比例作用
B.比例带PB保持原整定值不变
C.比例作用最弱,PB最大
D.比例作用最强,PB最小
B81.把Q T M-23J型调节器上的积分阀和比例阀都开大,积分时间和比例带的大小会发生下列变化()。
A.T i和PB都增大
B.T i和PB都减小
C.T i增大,PB减小
D.T i减小,PB增大
D82.调节器参数整定过程中,反应曲线法不适用的控制对象是()。
A.以燃油黏度为被控量的加热器
B.以转速为被控参数的柴油机
C.以气压为被控量的锅炉
D.以水位为控制参数的锅炉
B83.在用经验法整定调节器PB、T i参数值时,若阶跃改变给定值,其超调量较大,波动次数多才能稳定下来,则需()。
A.增大PB,缩短T i
B.增大PB,增长T i
C.减小PB,缩短T i
D.减小PB,增长T i
D84.在用经验法整定PI调节器参数时,要根据控制对象特性确定初始参数,若控制对象惯性大,则初始PB和T i应选得()。
A.PB大一些,T i小一些
B.PB大一些,T i大一些
C.PB小一些,T i小一些
D.PB小一些,T i大一些
A85.在整定调节器参数PB和T i时,应本着()。
A.把PB整定准确,T i宁大勿小
B.把PB整定准确,T i宁小勿大
C.把T i整定准确,PB宁大勿小
D.把T i整定准确,PB宁小勿大
C86.在调节器参数整定过程中,其基本依据是()。
A.控制对象特性
B.调节器的作用规律
C.被控量的动态过程
D.被控量的量程
C87.在用临界比例带法整定调节器参数时,该整定法不适用的场合为()。A.没有控制对象的特性参数
B.振荡周期太短
C.临界比例带PB K太小
D.临界比例带PB K太大
C88.调节器的参数整定应根据被控对象的特性而定,其选择的一般规律是()。A.对象时间常数小,比例带宜小,积分时间宜大,加微分作用
B.对象时间常数大,比例带宜大,积分时间宜小,不加微分作用
C.对象时间常数小,比例带宜大,积分时间宜小,不加微分作用
D.对象时间常数大,比例带宜小,积分时间宜大,不加微分作用
B89.当主机冷却水温度控制系统长期使用后,冷却器的时间常数变大时,为使系统仍有较好的控制指标,应适当()。
A.调小PB和T i
B.调小PB,调大T i
C.调大PB和T i
D.调大PB,调小T i
A90.在PID调节器中,要使其成为PI,PD或P调节器,则分别应使()。
A.T d=0,T i=∞,T d=0,T i=∞
B.T d=0,T i =∞,T d=0,T i =0
C.T d=0,T i=0,T d=0,T i=∞
D.T d=∞,T i =∞,T d=0,T i =0
D91.在调节器参数整定过程中如出现等幅振荡,其不可能的原因是()。A.状态参数受到周期性扰动的影响
B.阀门定位器调校不准
C.调节器的放大器调校不好
D.调节阀传动部分间隙过小
A92.在对PID调节器进行参数带定时,先整定出最佳的PB和T i,进微分作用后,可使()。
A.PB↓,T i↓
B.PB↓,T i↑
C.PB↑,T i↓
D.PB↑,T i↑
C93,.用PI调节其组成的控制系统中,多容控制对象比单容控制对象的控制系统其PB和T i整定在()。
A.PB↑,T i↑
B.PB↓,T i↓
C.PB↓,T i↑
D.PB↑,T i↓
A94.在柴油机冷却水温度控制系统中,调节器为PID型,通常比例带为()。A.20%~60%