多摩川旋变介绍

旋转变压器原理及其在自动控制中的应用
摘要:介绍旋转变压器(简称旋变)分类、结构特点、工作原理和解码方法,以及在各行各业中的应用,还有与其相关的工业设备(SMARTCAM)的应用特点。
关键词:旋转变压器,SMARTCODER,SMARTCAM
旋转变压器
简称旋变是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,主要分三大类旋转变压器:
1.正--余弦旋转变压器----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2.线性旋转变压器----其输出电压与转子转角成线性函数关系。线性旋转变压器
按转子结构又分成隐极式和凸极式两种。
3.比例式旋转变压器----其输出电压与转角成比例关系。
结构说明
由于我公司只销售日本多摩川公司的正余弦旋转变压器,所以在此介绍的旋转变压器皆为正余弦型的。
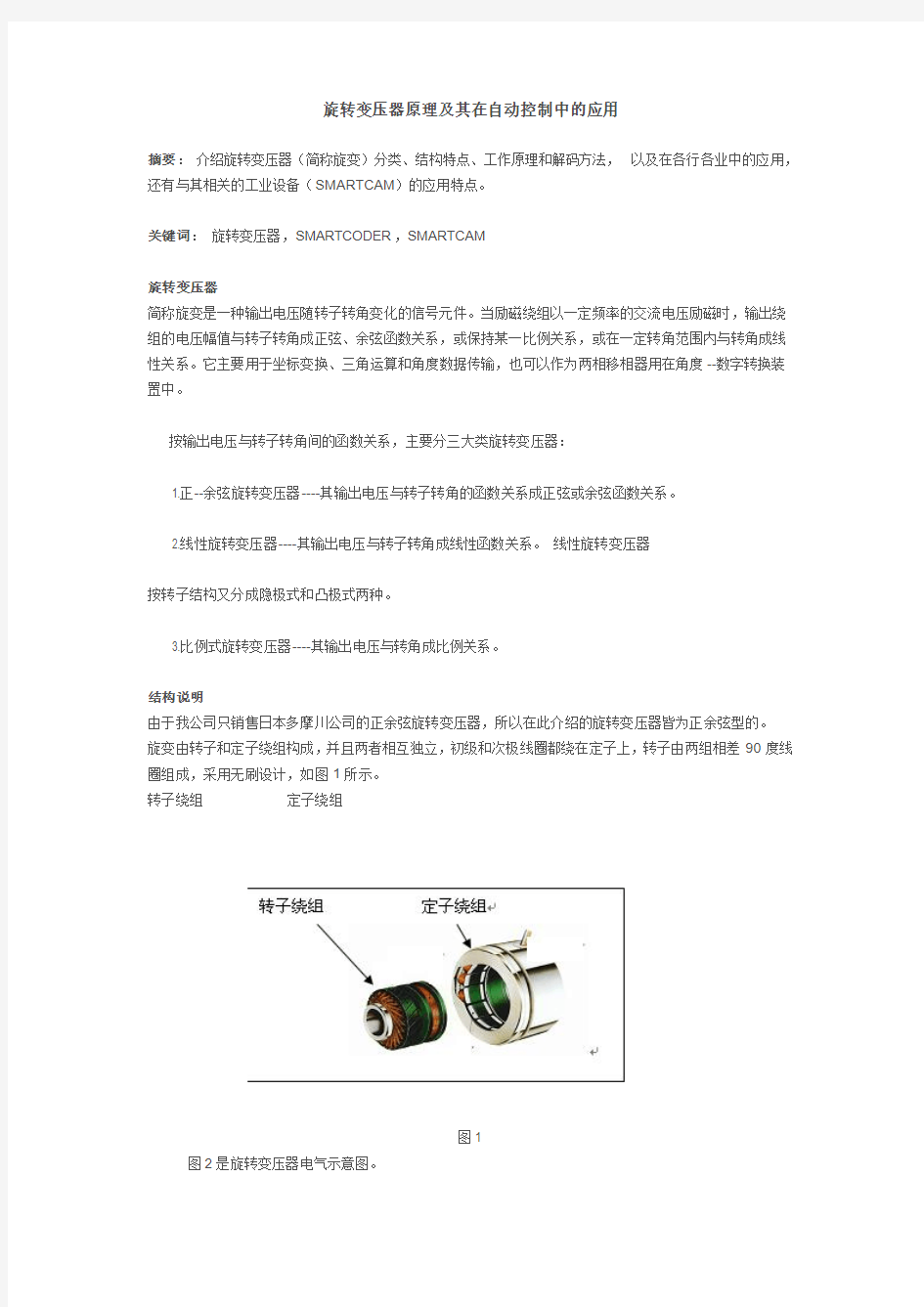
旋变由转子和定子绕组构成,并且两者相互独立,初级和次极线圈都绕在定子上,转子由两组相差90度线圈组成,采用无刷设计,如图1所示。
转子绕组定子绕组
图1
图2是旋转变压器电气示意图。
ER1-R2
励磁电压
V e
ES2-S4
图2
旋变的输入输出电压之间的具体函数关系如下所示:
设转子转动角度为θ,初级线圈电压(即励磁电压): ER1-R2=E*Sin2πft
f:励磁频率,E:信号幅度
那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ
K:传输比,θ:转子偏离原点的角度
令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图3所示,
图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。
不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。只需达到一定的电压数值即可, 一般来讲3V~120%额定电压。
(旋变转子旋转角度)
解码
日本多摩川公司推出了自己的多款解码芯片,其原理都基本相同,如图4所示,解码芯片原理框图中如果图中Vsr=0, 那么θm=θrd. 即可解码出转子转角。
乘法器
SIN
COS
D/A
θrd
相敏解
调器
积分器
压控振
荡器
VSR=kE1sinωt*sin(θm-θrd)
1相励磁,两相出力
Vsr=kEsinωt(sinθm*cosθRD-cosθm*sinθrd)
=kEsinωt*sin(θm-θrd)
鉴相器
解调出θrd
kE1sinωt*sinθm
kE1sinωt*cosθm
θm
励磁回路
乘法器
图4
解码芯片输出方式有增量式输出和绝对式输出,增量式输出时分辨率为1024C/T(C:脉冲数,T:一圈),绝对式输出输出位数为12位。而且可以输出方向信号和错误信号,外围电路简单,只需少许元件就可以完成解码工作。
日本多摩川公司先后推出的几款名为SMARTCODER的解码芯片,早期的有AU6802,AU6802N1,以及最近的AU6803等。
此外,旋变和多摩川的SMARTCAM配合可以模拟机械凸轮的运动控制,可以用于取代粗糙笨重的机械凸轮。成为工业控制中高效而又廉价的控制工具。
针对多摩川旋变我公司已经开发出解码板(即所谓的R/D转换板),能同时解码出增量式信号和绝对式信号,配合旋变,可以象使用编码器一样在变频以及SEVO系统中使用,欢迎各位来电咨询或洽谈购买。至于具体的解码电路就不在此介绍,读者朋友可以在相关的网站上搜索到芯片资料和相关的应用电路,如有疑问也可以直接拨打我公司电话咨询。
特征
由于旋转变压器本身的结构特点,所以具有耐恶劣环境的能力,具体参数如下:
温度范围:-55℃~155℃
振动:196m/s2(20G)10~500Hz
冲击:981 m/s2(100G)10ms
湿度:90% Rh Min. at60℃
转速:100~500RPS
此外,旋转变压器采用无刷设计,所以维护方便,使用可靠,寿命长,对机械和电气噪音不敏感。
由于旋变以上特点,所以被广泛应用在航空、航天、雷达、坦克和地炮火控等军事装备,也可用于数控机床和机器人等民用SEVO控制系统和机器人系统、机械工具、汽车、电力、冶金、纺织、印刷等领域。
应用
在伺服系统中,往往需要实时地检测出电机转子的位置,包括转子的绝对位置和增量式位置,同时还需检测出电机的速度,以实现对电机的转矩、速度、及其驱动的机构的位置的高精度控制。在电机转子位置的检测中,旋转变压器由于其具有坚固耐用,能够提供高精度的位置信息等突出优点,而获得越来越广泛的应用。
但是由于旋转变压器的输出是包含着位置信息的模拟信号,需对其处理并将其转化成对应的包含着位置信息的数字量,才能与单片机或DSP等控制芯片接口。这就需要设计相应的信号转换电路或者使用专用的旋转变压器-数字转换器来实现。而多摩川所提供的AU6802N1系列解码芯片能很好的解决这个问题,它能同时输出绝对式信号和增量式信号,因此在伺服系统中获得了广泛的应用。
在纺织行业中,由于环境因素,容易产生严重的静电,普通编码器很容易在此类环境中损坏,而旋转变压器由于本身的结构特点,而具有很强的抵抗静电的能力。所以如果采用旋转变压器则可以很好的解决这个问题。
此外,在其他各行各业,旋转变压器都可代替编码器而获得广泛应用。比如在冶金,水利水电,自动化设备,印刷,电梯等都可应用。
旋转变压器基础知识
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输 出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成 线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度 --数字转换装 置中。 按输出电压与转子转角间的函数关系 ,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2. 线性旋转变压器(XX )、( XDX ----其输出电压与转子转角成线性函数关系。 线性旋转变压器按转子结构又分成隐极式和凸极式两种, 前者(XX )实际上也是正--余弦旋转变压器, 不同的是采用了特定的变比和接线方式。后者( XDX 称单绕组线性旋转变压器。 变化的交变电压信号。 应电势的幅值,便可间接地得到转子相对于定子的位置,即 角的大小。 以上是两极绕组式旋转变压器的基本工作原理, 在实际应用中,考虑到使用的方便性和检测精度等因素, 常采用四极绕组式旋转变压器。这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。 1. 鉴相式工作方式 鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。如 图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。 图中SS 2为定子主绕组,K 1K 2 为定子辅助绕组。当 S 1S 2 和 K 1K 2中分别通以交变激磁电压时 V s = V m Cos t (4 3);V = V sin t (4—4)4) t (4 3);V s =V m Sin t (4 4) 根据线性叠加原理,可在转子绕组 感应电势 V BS 和V BK 之和,即 比例式旋转变压器(XL ) ----其输出电压与转角成比例关系。 二、旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子 当激磁电压加到定子绕组时,通过电磁耦合, 3. 原理图。图中Z 为阻抗。设加在定子绕组 (旋转一周)之间空气间隙内磁通分布符合正弦规律, 因此, 转子绕组便产生感应电势。图 4-3为两极旋转变压器电气工作 的激磁电压为 V S 《sin t 图4-3两极旋转变压器 根据电磁学原理,转子绕组 B 1B 2 V B KV s sin KV m sin sin t 式中K ――旋转变压器的变化; (4 — 1) 中的感应电势则为 4— 2) (4— 2) V m — V s 的幅值; ――转子的转角,当转子和定子的磁轴垂直时, 安装在机床丝杠上,定子安装在机床底座上,则 的角度,它间接反映了机床工作台的位移。 =0。如果转子 角代表的是丝杠转过 由式(4 — 2)可知,转子绕组中的感应电势 V B 为以角速度3随时间 t 其幅值 KV m sin 随转子和定子的相对角位移 以正弦函数变化。因此,只要测量出转子绕组中的感 (4— 4) Bl B 2 中得到感应电 势 V s 和 V k 在 Bl B 2 中产生
旋转变压器基础知识
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。 按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。 线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。后者(XDX )称单绕组线性旋转变压器。 3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。 二、 旋转变压器的工作原理 由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。图4-3为两极旋转变压器电气工作原理图。图中Z 为阻抗。设加在定子绕组的激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为 sin sin sin θθω== (4-2)B s m V KV KV t (4—2) 式中K ——旋转变压器的变化;—的幅值m s V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。如果转子 安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过 的角度,它间接反映了机床工作台的位移。 由式(4-2)可知,转子绕组中的感应电势 B V 为以角速度ω随时间t 变化的交变电压信号。 其幅值 sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。因此,只要测量出转子绕组中的感 应电势的幅值,便可间接地得到转子相对于定子的位置,即θ角的大小。 以上是两极绕组式旋转变压器的基本工作原理,在实际应用中,考虑到使用的方便性和检测精度等因素,常采用四极绕组式旋转变压器。这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。 1.鉴相式工作方式 鉴相式工作方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。如 图4-4所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。图中12S S 为定子主绕组,12 K K 为定子辅助绕组。当12S S 和12K K 中分别通以交变激磁电压时 s m V V cos (43);V V sin (44)ωω--= = t t (4—3) s m (43);V V sin (44)ω-- = t t (4—4) 根据线性叠加原理,可在转子绕组12B B 中得到感应电势B V ,其值为激磁电压s V 和k V 在12B B 中产生 感应电势BS V 和BK V 之和,即
东京简介资料
东京 东京,日本国首都,位于日本本州岛关东平原南端。东京都位于关东地区南部,大致位于日本列岛中心。东部以江户川为界与千叶县连接,西部以山地为界与山梨县连接,南部以多摩川为界与神奈川县连接,北部与埼玉县连接。东京圈由东京和三个邻县埼玉、神奈川、千叶组成。这个地区的人口占日本总人口的26%。首都圈由东京都和周围的七个县埼玉、神奈川、千叶、群马、枥木、茨城、山梨组成。 银座是东京中央区的高档商业区,以高级购物商店闻名,是东京其中一个代表性地区,同时也是日本有代表性的最大最繁华的街。 秋叶原,是世界上屈指可数的电子动漫电器街。除了电器商品专卖店之外,商务、饮食等服务功能也日渐具备齐全。在这里除了有各个制造厂商的服务机构和商品展示厅之外,免税店和各种促销活动也很充实,走走看看也非常有趣 东京塔,在日本东京港区芝公园,是一座是以巴黎艾菲尔铁塔为范本而建造的红白色铁塔,但其高333公尺,比艾菲尔铁塔高出13公尺,是全世界最高的自立式铁塔。现在是东京的标志之一。 浅草寺创建于628年,是东京都内最古老的寺院。江户时代将军德川家康把这里指定为幕府的祈愿所,是平安文化的中心地。浅草寺周围的日本特色很浓郁,可以慢慢步行欣赏。 进入东京市内,感觉很不一样,虽然上海也是国际大都市,但从城市规模和布局的紧密程度而言,上海无法与东京相提并论。站在东京都厅的45层上向下看,东京就像是一个一个的小垃圾盒挤挤地排在一起,但当你身处于其中时,你又会感到非常得干净,一尘不染,闻不到一点废气的味道,这只能说明东京寸金寸土,对土地的利用到达了极至。出于防振的考虑整个东京的摩天大楼屈指可数,而且绝大多数房屋都是钢结构的。要说繁华,我想上海的淮海路南京路也不逊色,但是东京就是不一样,一方面其繁华的规模远远超过上海,另一方面从整体而言,东京比上海干净得多,有序得多。在这里几乎看不到乱穿马路的行为,即使在交通流量极高的时候,也不会出现上海那样严重的堵塞问题,值得一提的是,东京市内主要马路大都是双向四车道,没有自行车道,一般的马路基本都是两车道,自行车在人行道上行驶,即使这样,他们的交通也很有秩序。在繁华的新宿,人流量也极高,放眼望去都是人,但大家都遵守规则,多而不乱,而且很礼让。 再比较一下,中日两国人民的性格差异,我们中国人走到哪都是有说有笑,想说就说,而且嗓门较大,而日本人则含蓄得多,在公共场合车站、商场、饭店基本上说话很轻,加上马路上噪音很小,所以感到日本很安静,不吵。
旋转变压器与编码器的区别
从原理上讲,旋转变压器是采用电磁感应原理工作,随着旋转变压器的转子和定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角位置关系。 旋转变压器有单对极和多对极之分,n对极的又被习惯地称为n倍速。在一个极对的角度范围内(单对极就是一整圈),旋转变压器信号经处理后的结果一般都具有反映绝对位置的特性,即可反映当前角位置是处于0~360度(电角度)中的多少度上。目前商用分辨率可以做到2的12次方以上,直至2的16次方,再高就比较困难了。 典型的旋转变压器本体由硅钢片和漆包线构成,不包含任何电子元件,因而抗震能力和温度特性极佳,因而其抗恶劣环境的工作能力远胜于普通旋转编码器,在军工产品中具有广泛应用。 典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量式和绝对式等类型. 旋转变压器 简称旋变,是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。 按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。用户往往选择BRT型的旋变,因为它易于解码。 有增量型和绝对型 增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量. 增量型测小角度准,大角度有累积误差 绝对型测小角度相对不准,但大角度无累积误差 说简单点的编码器更精确采用的是脉冲计数旋转变压器就不是脉冲技术而是模拟量反馈 据我所知区别如下:1、编码器多是方波输出的,旋变是正余弦的,通过芯片解算出相位差。2、旋变的转速比较高,可以达到上万转,编码器就没那么高了。 3、旋变的应用环境温度是-55到+155,编码器是-10到+70。 4、旋变一般是增量的。根本区别在于:数字信号和模拟正弦或余弦信号的的区别。resolver 有2组信号,可以分别处理成增量信号和绝对值型号。今后会越来越多地得到推广使用。
多摩川磁阻式旋变——产品手册
Catalogue No.T12-1579N2 (Superior Flat Absolute Angle Sensor) ? Conception Makes Technology Fun. ?
1 ■Extremely Thin Dimensions Singlsyn realizes smallest mounting space because of its extremely thin thickness as a built-in structure. ■Wide Temperature Range –55 ~ +155°C (Optional : High temperature type) ■Robust for Hard Environments ? Vibration : 196 m/sec 2(20G)? Shock : 980 m/sec 2(100G)? Humidity : Up to 90% RH ■High Rotational Speed Up to 30,000 min –1 (rpm) Singlsyn is the latest art of Absolute Angle Sensor which is developed by Tamagawa. This is a superior sensor which realizes extremely thin structure, usability in wide temperature and humidity range and in other hard environmental conditions, and high reliability. (Singlsyn is our trade mark for VR type Resolver.) (Superior Flat Absolute Angle Sensor) Patent Pending ? ■High Reliability Singlsyn has the similar structure to electric motors but has high reliability because of no winding coil on its rotor. ■Sensing Absolute Position and Velocity According to connection to an R/D converter or Smartcoder , it is capable of converting analog output signals of Singlsyn to digital position (angle) signals. The position signals are transmitted as the absolute position within a range of electrical one cycle.■Low Cost Especially low cost is realized by reducing the number of parts to 1/10 compared with conventional resolvers. For special cases, please consulf us.
2013.7-多摩川编码器总结
2013.7 多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、熟悉工作环境,掌握Modelsim 以及Quartus 的使用。 2、阅读多摩川编码器的通讯协议。 3、根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、仿真通过后,通过Quartus 编译后下载到CPLD 上并与编码器通讯,实际情况下运行。 5、完成各项要求的功能。 6、对代码进行优化,尽可能减少资源占用。 7、验收。 三、总体结构 双绞线,差分式,串行 地址/数据总线接口 RO,DI,DIR逻辑信号 结构分三部分:多摩川编码器,CPLD ,DSP 。 1、编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、CPLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端口连接) 3、主要工作是CPLD 的解码部分。 四、通讯协议 1、TS5668的技术指标:(物理层) 精度:单圈精度: 17位(131 072) 多圈精度: 16位(65 536) 最高转速/ ( r ·min - 1 ): 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口:3FG ,4sig+ ,5sig -,7VCC ,8DGND 。4和5为差分信号接口。 2、通信步骤如下图:(逻辑链路层) 1)CPLD 向编码器发送一个控制字CF 2)3us 后编码器返回数据包。 3)CPLD 对数据包进行解码,并将得到的数据放在总线上,等待DSP 获取。 具体流程如下图:
曳引机使用说明书
曳引机使用说明书 安全可靠人性创新 永磁同步无齿轮曳引机 MTA50000AB
序言 感谢您使用该系列永磁同步无齿轮曳引机产品! 永磁同步电机技术作为一种电动机新技术应用于电梯曳引机领域开始于二十世纪九十年代,它带来了一次电梯公司形式上的革命。该系列永磁同步无齿轮曳引机采用盘式制动器、内转子型式。 本公司研发的永磁同步无齿轮曳引机的各项指标设计均符合国家相关规定,每台曳引机出厂前都经过严格的质量检验,对制动力、绝缘耐压、振动、噪音等各项指标进行了全面的检测,从而保证产品的质量和性能符合标准规定。 此手册为产品的一部分,旨在为用户正确使用无齿轮曳引机并提供曳引机安装、保养方面的指导,请务必妥善保管于安全的地方,以方便服务人员使用。在对机器进行安装、调试、使用、维修前,请务必阅读并理解此手册的内容。对不按此手册或不按我公司工程人员指导进行违规操作所产生的所有后果,我公司有权不予承担。 我公司拥有对本手册及其所包含信息的所有权,并有权对手册内容进行版本更新,而不另行通知。 严禁任何单位和个人,不经本公司同意复制部分或全部内容,用于同行业产品的说明和介绍。
目录 序言 一安全 ........................................................................................................ - 1 -二产品说明 ................................................................................................ - 1 -2.1曳引机介绍 (1) 2.2曳引机工作条件 (1) 2.3防护等级 (1) 2.4产品型号 (2) 2.5外形安装尺寸 (2) 2.6备件 (3) 三运输、仓储及吊装 ................................................................................. - 3 -四安装 ........................................................................................................ - 4 -4.1使用前检查 (4) 4.2安装注意事项 (4) 4.3远程松闸手动装置的安装及使用说明 (4) 4.3.1 安装 ................................................................................................ - 4 - 4.3.2 使用说明 ........................................................................................ - 5 -
多摩川产品资料说明
陀螺仪: 可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。 1、体积小、重量轻。适合于对安装空间和重量要求苛刻的场合,例如弹载测量等。 2、低成本。 3、高可靠性。内部无转动部件,全固态装置,抗大过载冲击,工作寿命长。 4、低功耗。 5、大量程。适于高转速大g值的场合。 6、易于数字化、智能化。可数字输出,温度补偿,零位校正等。 测速发电机: 输出电动势与转速成比例的微特电机。测速发电机的绕组和磁路经精确设计,其输出电动势 E 和转速 n 成线性关系,即 E=Kn,K 是常数。改变旋转方向时输出电动势的极性即相应改变。在被测机构与测速发电机同轴联接时,只要检测出输出电动势,就能获得被测机构的转速,故又称速度传感器。 测速发电机广泛用于各种速度或位置控制系统。在自动控制系统中作为检测速度的元件,以调节电动机转速或通过反馈来提高系统稳定性和精度;在解算装置中可作为微分、积分元件,也可作为加速或延迟信号用或用来测量各种运动机械在摆动或转动以及直线运动时的速度。 电子凸轮: 利用角度位置传感器来模拟机械凸轮各控制点的角度范围,并能独立输出各自的控制信号,此种设备称为电子凸轮,包含“机械凸轮+微动开关”的基本功能。 ?可以输出多路控制开关量(ON/OFF),且每路都可以独立预设起始、终止角度。 ?可以动态检测和显示实际运行角度,对设备运行和再调整实时检测。 ?可以随时修改预设角度,且每一路均有 LED 状态指示,“开态”点亮,“关态”熄灭。 ?各路输出信号在电气上相互隔离,抗干扰能力强,可靠性高。 ?动作精度可达到1°typical 轨迹球: 外型尺寸:1、1.4、2、3英寸 输出方式:PS2、USB、方波、脉冲输出
旋转变压器与编码器的区别
旋转变压器与编码器的区 别 The Standardization Office was revised on the afternoon of December 13, 2020
从原理上讲,旋转变压器是采用电磁感应原理工作,随着旋转变压器的转子和 定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调 制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机, 根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角 位置关系。 旋转变压器有单对极和多对极之分,n对极的又被习惯地称为n倍速。在一个 极对的角度范围内(单对极就是一整圈),旋转变压器信号经处理后的结果一 般都具有反映绝对位置的特性,即可反映当前角位置是处于0~360度(电角 度)中的多少度上。目前商用分辨率可以做到2的12次方以上,直至2的16 次方,再高就比较困难了。 典型的旋转变压器本体由硅钢片和漆包线构成,不包含任何电子元件,因而抗 震能力和温度特性极佳,因而其抗恶劣环境的工作能力远胜于普通旋转编码 器,在军工产品中具有广泛应用。 典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量 式和绝对式等类型. 旋转变压器 简称旋变,是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。 按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。用户往往选择BRT型的旋变,因为它易于解码。 有增量型和绝对型 增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量. 增量型测小角度准,大角度有累积误差
旋转变压器分类及接口电路
摘要:本文简要介绍编码器、旋转变压器应用特点和接口方法,其中重点介绍产品通信协议和硬件接口电路以及专用的接收芯片AU5561应用方法。 编码器发展历史 早期的编码器主要是旋转变压器,旋转变压器IP值高,能在一些比较恶劣的环境条件下工作,虽然因为对电磁干扰敏感以及解码复杂等缺点而逐渐退出,但是时至今日,仍然有其特有的价值,比如作为混合动力汽车的速度反馈,几乎是不可代替的,此外在环境恶劣的钢铁行业、水利水电行业,旋转变压器因为其防护等级高同样获得了广泛的应用。随着半导体技术的发展,后来便有霍尔传感器和光电编码器,霍尔传感器精度不高但价格便宜,而且不能耐高温,只适合用在一些低端场合,光电编码器正是由于克服了前面两种编码器的缺点而产生,它精度高,抗干扰能力强,接口简单使用方便因而获得了最广泛的应用。 编码器的生产厂家很多,这里以多摩川的产品为例进行介绍。 下面以旋转变压器、增量式编码器、绝对式编码器为例逐一进行介绍。 旋转变压器 简称旋变是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。 按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。用户往往选择BRT型的旋变,因为它易于解码。 旋转变压器解码 图4旋转变压器电气示意图。 旋变的输入输出电压之间的具体函数关系如下所示: 设转子转动角度为θ,初级线圈电压(即励磁电压):ER1-R2=E*Sin2πft f:励磁频率,E:信号幅度 那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ K:传输比, θ:转子偏离原点的角度 令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图5所示, 图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。 不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。只需达到一定的电压数值即可,一般来讲3V~1.2倍额定电压都可满足解码需求。 多摩川为自己的旋变开发了专门的解码芯片AU6802N1,并且艾而特公司有现成的解码板可供使用,解码板支持10KHZ励磁频率,0.5的传输比,可以同时提供增量式和绝对式信号输出,增量式输出
多摩川编码器
ROTARY ENCODERS FA-CODER ? OIH35
ROTARY ENCODERS to high resolution are available to meet all of the requirements. High performance encoders supported by these high disk pro- ducing techniques are available. FA-CODER ?
Super-precision angle index device HISTORY OF ENCODER DEVELOPMENT AT TAMAGAWA SEIKI SPECIFICATION LIST (INCREMENTAL) SPECIFICATION LIST (ABSOLUTE) INDIVIDUAL SPECIFICATION (INCREMENTAL) INDIVIDUAL SPECIFICATION (ABSOLUTE) NOTICE IN TRANSMITTING TRANSMITTING DISTANCE HOW TO USE ENCODER CONTROL SIGNAL CONVERSION TIME NOTICE IN HANDLING MOUNTING WAY DEFINITIONS COUPLING SPECIFICATION MOUNTING PLATE ANGLE CONVERSION LIST I N D E X 2
1970 S45 1975 S50 1980 S55 1985 S60 3 100 3,600C/T 12bit 17bit HISTORY OF ENCODER DEV (for steel) TS5146 5,000C/T TS5410 Series 90k 480k C/T 19bit
2013.7 多摩川编码器总结
2013.7 多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、熟悉工作环境,掌握Modelsim 以及Quartus 的使用。 2、阅读多摩川编码器的通讯协议。 3、根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、仿真通过后,通过Quartus 编译后下载到CPLD 上并与编码器通讯,实际情况下运行。 5、完成各项要求的功能。 6、对代码进行优化,尽可能减少资源占用。 7、验收。 三、总体结构 双绞线,差分式,串行 地址/数据总线接口RO,DI,DIR逻辑信号结构分三部分:多摩川编码器,CPLD ,DSP 。 1、编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、CPLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端口连接) 3、主要工作是CPLD 的解码部分。 四、通讯协议 1、TS5668的技术指标:(物理层) 精度:单圈精度: 17位(131 072) 多圈精度: 16位(65 536) 最高转速/ ( r ·min - 1 ): 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口:3FG ,4sig+ ,5sig-,7VCC ,8DGND 。4和5为差分信号接口。 2、通信步骤如下图:(逻辑链路层) 1)CPLD 向编码器发送一个控制字CF 2)3us 后编码器返回数据包。 3)CPLD 对数据包进行解码,并将得到的数据放在总线上,等待DSP 获取。 具体流程如下图:
20137多摩川编码器总结
2013.7多摩川编码器总结 一、摘要 基于CPLD 和DSP 实现CPLD 与多摩川编码器的通讯,通过对编码器发送请求,得到 编码器发回的数据并进行解码,得到绝对位置值。 二、学习步骤: 1、 熟悉工作环境,掌握 Modelsim 以及Quartus 的使用。 2、 阅读多摩川编码器的通讯协议。 3、 根据协议编写testbench ,并在Modelsim 上进行仿真调试。 4、 仿真通过后,通过 Quartus 编译后下载到 CPLD 上并与编码器通讯,实际情况下运 行。 5、 完成各项要求的功能。 6、 对代码进行优化,尽可能减少资源占用。 7、 验收。 三、总体结构 结构分三部分:多摩川编码器, CPLD ,DSP 。 1、 编码器跟CPLD 之间通过MAX485电平转换进行连接。 2、 C PLD 与DSP 则通过总线进行连接(这一部分结构编写学长已经完成并且提供了端 口连接) 3、 主要工作是 CPLD 的解码部分。 四、通讯协议 1、 TS5668的技术指标:(物理层) 精度:单圈精度:17位(131 072) 多圈精度:16位(65 536) 最高转速/ ( r ? min - 1 ) : 6 000】 输出:差分NRZ 编码二进制 传输速度/Mbp s : 2. 5 发送、接收电路:差分形式 通信方式:主从模式 接口: 3FG , 4sig+ , 5sig-, 7VCC , 8DGND 。4 和 5 为差分信号接口。 2、 通信步骤如下图:(逻辑链路层) 1) CPLD 向编码器发送一个控制字 CF 2) 3us 后编码器返回数据包。 3) CPLD 对数据包进 行解码,并将得到的数据放在总线上,等待 DSP 获取。 具体流 程如下图: RO DI ,DIR 逻辑信号 MAX48电平转 换接口 CPL 解码 地址/数据总线接口 双绞线,差分式,串行 1/
多摩川旋变介绍
旋转变压器原理及其在自动控制中的应用 摘要:介绍旋转变压器(简称旋变)分类、结构特点、工作原理和解码方法,以及在各行各业中的应用,还有与其相关的工业设备(SMARTCAM)的应用特点。 关键词:旋转变压器,SMARTCODER,SMARTCAM 旋转变压器 简称旋变是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。 按输出电压与转子转角间的函数关系,主要分三大类旋转变压器: 1.正--余弦旋转变压器----其输出电压与转子转角的函数关系成正弦或余弦函数关系。 2.线性旋转变压器----其输出电压与转子转角成线性函数关系。线性旋转变压器 按转子结构又分成隐极式和凸极式两种。 3.比例式旋转变压器----其输出电压与转角成比例关系。 结构说明 由于我公司只销售日本多摩川公司的正余弦旋转变压器,所以在此介绍的旋转变压器皆为正余弦型的。 旋变由转子和定子绕组构成,并且两者相互独立,初级和次极线圈都绕在定子上,转子由两组相差90度线圈组成,采用无刷设计,如图1所示。 转子绕组定子绕组 图1 图2是旋转变压器电气示意图。
ER1-R2 励磁电压 V e ES2-S4 图2 旋变的输入输出电压之间的具体函数关系如下所示: 设转子转动角度为θ,初级线圈电压(即励磁电压): ER1-R2=E*Sin2πft f:励磁频率,E:信号幅度 那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*Sinθ K:传输比,θ:转子偏离原点的角度 令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图3所示, 图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。 不难看出,励磁频率越高,旋变解码精度也就越高,而励磁电压幅度则对解码没有很明显的影响。只需达到一定的电压数值即可, 一般来讲3V~120%额定电压。 (旋变转子旋转角度)