极坐标法潮流计算

课程设计(论文)任务书
年级专业
学生姓名
学 号
题目名称 采用极坐标下的牛顿-拉夫逊计算 设计时间
课程名称
潮流计算课程设计
课程编号
121202306
设计地点
综合仿真实验室 一、课程设计(论文)目的
1.掌握电力系统极坐标下的牛顿-拉夫逊计算的基本原理;
2.掌握并能熟练运用一门计算机语言(MATLAB 语言或FORTRAN 或C 语言或C++语言);
3.采用计算机语言对极坐标下的牛顿-拉夫逊计算进行计算机编程计算。
通过课程设计, 使学生巩固电力系统潮流计算的基本原理与方法,掌握潮流计算的数值求解方法(节点导纳矩阵,修正方程),开发系统潮流计算的计算程序。让学生掌握用计算机仿真分析电力系统的方法。同时,通过软件开发,也有助于计算机操作能力和软件开发能力的提高。 二、已知技术参数和条件
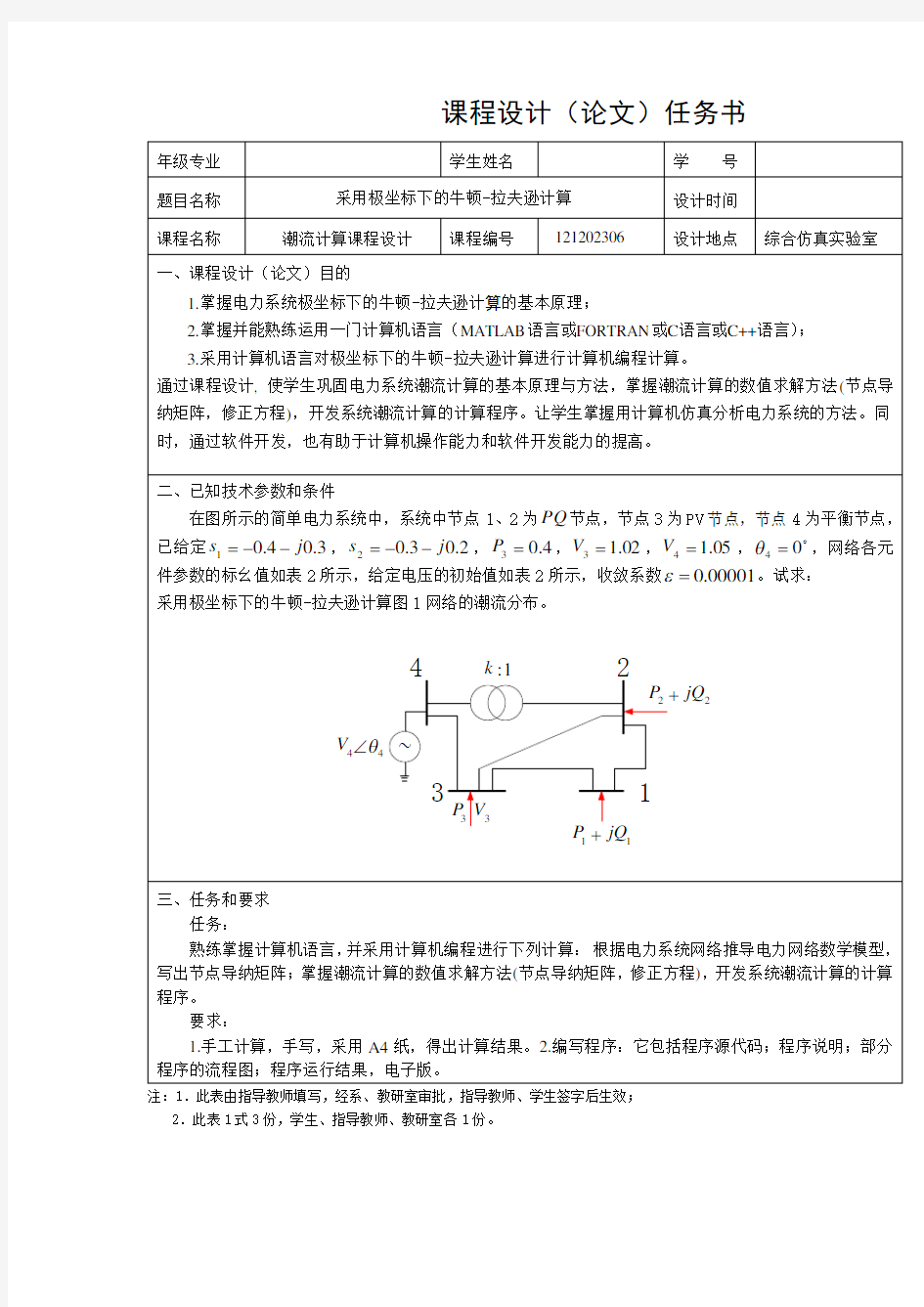
在图所示的简单电力系统中,系统中节点1、2为PQ 节点,节点3为PV 节点,节点4为平衡节点,已给定3.04.01j s --=,2.03.02j s --=,4.03=P ,02.13=V ,05.14=V ,
04=θ,网络各元件参数的标幺值如表2所示,给定电压的初始值如表2所示,收敛系数00001.0=ε。试求: 采用极坐标下的牛顿-拉夫逊计算图1网络的潮流分布。
~1
2
3
4
1
:k 4
4θ∠V 1
1jQ P +2
2jQ P +3
V 3P
三、任务和要求 任务:
熟练掌握计算机语言,并采用计算机编程进行下列计算: 根据电力系统网络推导电力网络数学模型,写出节点导纳矩阵;掌握潮流计算的数值求解方法(节点导纳矩阵,修正方程),开发系统潮流计算的计算程序。
要求:
1.手工计算,手写,采用A4纸,得出计算结果。
2.编写程序:它包括程序源代码;程序说明;部分程序的流程图;程序运行结果,电子版。
注:1.此表由指导教师填写,经系、教研室审批,指导教师、学生签字后生效;
2.此表1式3份,学生、指导教师、教研室各1份。
四、参考资料和现有基础条件(包括实验室、主要仪器设备等)
[1] 何仰赞等.电力系统分析[M]. 武汉:华中理工大学出版社,2002.3
[2] 西安交通大学等.电力系统计算[M].北京:水利电力出版社,1993.12
五、进度安排
2010年12月20日:下达课程设计的计划书,任务书,设计题目及分组情况。
2010年12月21日-23日:学生完成潮流计算的手工计算。
2010年12月24日:讲述课程设计编程的思路、要求。举例:用MATLAB软件编写的部分程序。 2010年12月25日-30日:学生编写程序。
2011年1月1日-3日:上机调试程序,得出正确结果。
2011年1月4日-5日:整理课程设计报告。
2011年1月6日:学生答辩。
六、教研室审批意见
教研室主任(签字):年月日
七|、主管教学主任意见
主管主任(签字):年月日八、备注
指导教师(签字):学生(签字):
设计主题
题目一:在下图所示的简单电力系统中,系统中节点1、2为PQ 节点,节点3为PV 节点,节点4为平衡节点,已给定3.04.01j s --=,2.03.02j s --=,
4.03=P ,02.13=V ,0
5.14=V , 04=θ,网络各元件参数的标幺值如表1所示,给定电压的初始值如表2所示,收敛系数00001.0=ε。试求: 采用极坐标下的牛顿-拉夫逊计算图示网络的潮流计算。
~1
2
3
4
1
:k 4
4θ∠V 1
1jQ P +2
2jQ P +3
V 3P
表1 网络各元件参数的标幺值
支路 电阻 电抗 输电线路
c y 2
1 变压器变比k
1—2 0.02 0.06 0.01 — 1—3 0.01 0.03 0.01 — 2—3 0.03 0.07 — — 2—4 0.0 0.05 — 0.9625 3—4 0.02
0.05
—
—
表2各节点电压(初值)标幺值参数
节点i
1 2 3 4 )0()0()0(i
i i jf e U += 1.00+j0.0
1.0+j0.0
1.0+j0.0
1.05+j0.0
3 潮流计算流程图
本次课程设计采用极坐标下的牛顿-拉夫逊计算网络的潮流计算。其牛顿-拉夫逊潮流计算程序框图如下所示。
图3.1 极坐标下的牛顿-拉夫逊潮流计算程序框图
输入原始数据 形成节点导纳矩阵 设节点电压初值,相角初值
用公式计算不平衡功率△P
(i )
i
△Q
(i )
i △V 2(k )
i
Max (|△P
(K )
i
△Q (i )
i △V 2(k )
i |<ε
解修正方程求△δ
(k )
△V (k )
δ
(k+1)
=δ
(k )+△δ
(k )
V
(k+1)
=V
(k )
+△V
(k )
K 0
计算平衡节点功率及全部路线功率
输出
K+1=k
是
4 手工计算
插入手写的潮流计算过程
5 MATLAB程序设计
5.1 程序
%电力系统极坐标下的牛顿-拉夫逊法潮流计算
disp('电力系统极坐标下的牛顿-拉夫逊法潮流计算:');
clear
n=input('请输入结点数:n=');
n1=input('请输入PV结点数:n1=');
n2=input('请输入PQ结点数:n2=');
isb=input('请输入平衡结点:isb=');
pr=input('请输入精确度:pr=');
K=input('请输入变比矩阵:K=');
C=input('请输入支路阻抗矩阵:C=');
y=input('请输入支路导纳矩阵:y=');
U=input('请输入结点电压矩阵:U=');
S=input('请输入各结点的功率:S=');
Z=zeros(1,n);N=zeros(n1+n2,n2);L=zeros(n2,n2);QT1=zeros(1,n1+n2); for m=1:n
for R=1:n
C(m,m)=C(m,m)+y(m,R);
if K(m,R)~=0
C(m,m)=C(m,m)+1/(C(m,R) /( K(m,R) * (K(m,R)-1))) ;
C(R,R)=C(R,R)+1/(C(m,R)/(1-K(m,R)));
C(m,R)=C(m,R)/K(m,R);
C(R,m)=C(m,R);
end
end
end
for m=1:n
for R=1:n
if m~=R
Z(m)=Z(m)+1/C(m,R);
end
end
end
for m=1:n
for R=1:n
if m==R
Y(m,m)=C(m,m)+Z(m);
else
Y(m,R)=-1/C(m,R);
end
end
end
disp('结点导纳矩阵:');
disp(Y);
disp('迭代中的雅克比矩阵:');
G=real(Y);
B=imag(Y);
O=angle(U);
U1=abs(U);
k=0;
PR=1;
P=real(S);
Q=imag(S);
while PR>pr
for m=1:n2
UD(m)=U1(m);
end
for m=1:n1+n2
for R=1:n
PT(R)=U1(m)*U1(R)*(G(m,R)*cos(O(m)-O(R))+B(m,R)*sin(O(m)-O(R )));
end
PT1(m)=sum(PT);
PP(m)=P(m)-PT1(m);
PP1(k+1,m)=PP(m);
end
for m=1:n2
for R=1:n
QT(R)=U1(m)*U1(R)*(G(m,R)*sin(O(m)-O(R))-B(m,R)*cos(O(m)-O(R )));
end
QT1(m)=sum(QT);
QQ(m)=Q(m)-QT1(m);
QQ1(k+1,m)=QQ(m);
end
PR1=max(abs(PP));
PR2=max(abs(QQ));
PR=max(PR1,PR2);
for m=1:n1+n2
for R=1:n1+n2
if m==R
H(m,m)=U1(m)^2*B(m,m)+QT1(m);
else
H(m,R)=-U1(m)*U1(R)*(G(m,R)*sin(O(m)-O(R))-B(m,R)*cos(O(m)-O( R)));
end
end
end
for m=1:n1+n2
for R=1:n2
if m==R
N(m,m)=-U1(m)^2*G(m,m)-PT1(m);
else
N(m,R)=-U1(m)*U1(R)*(G(m,R)*cos(O(m)-O(R))+B(m,R)*sin(O(m)-O (R)));
end
end
end
for m=1:n2
for R=1:n1+n2
if m==R
J(m,m)=U1(m)^2*G(m,m)-PT1(m);
else
J(m,R)=U1(m)*U1(R)*(G(m,R)*cos(O(m)-O(R))+B(m,R)*sin(O(m)-O( R)));
end
end
end
for m=1:n2
for R=1:n2
if m==R
L(m,m)=U1(m)^2*B(m,m)-QT1(m);
else
L(m,R)=-U1(m)*U1(R)*(G(m,R)*sin(O(m)-O(R))-B(m,R)*cos(O(m)-O( R)));
end
end
end
JJ=[H N;J L];
disp(JJ);
PQ=[PP';QQ'];
DA=-inv(JJ)*PQ;
DA1=DA';
for m=1:n1+n2
OO(m)=DA1(m);
end
for m=n:n1+n2+n2
UU1(m-n1-n2)=DA1(m);
end
UD2=diag(UD);
UU=UU1*UD2;
for m=1:n1+n2
O(m)=O(m)+OO(m);
end
for m=1:n2
U1(m)=U1(m)+UU(m);
end
for m=1:n1+n2
o(k+1,m)=180/pi*O(m);
end
for m=1:n2
u(k+1,m)=U1(m);
end
k=k+1;
end
for m=1:n
b(m)=U1(m)*cos(O(m));
c(m)=U1(m)*sin(O(m));
end
U=b+i*c;
for R=1:n
PH1(R)=U(isb)*conj(Y(isb,R))*conj(U(R)); end
PH=sum(PH1);
for m=1:n
for R=1:n
if m~=R
C1(m,R)=1/C(m,R);
else
C1(m,m)=C(m,m);
end
end
end
for m=1:n
for R=1:n
if (C(m,R)~=inf)&(m~=R)
SS(m,R)=U1(m)^2*conj(C1(m,m))+U(m)*(conj(U(m))-conj(U(R)))*conj (C1(m,R));
end
end
end
disp('迭代中的△P:');disp(PP1);
disp('迭代中的△Q:');disp(QQ1);
disp('迭代中相角:');disp(o);
disp('迭代中电压的模:');disp(u);
disp('平衡结点的功率:');disp(PH);
disp('全部线路功率分布:');disp(SS);
注意:
matlab默认输出结果保留4位小数,可在显示屏上输入>>fomat long
此时小数点后面保留14位小数
5.2 程序结果
请输入结点数:n=4
请输入PV结点数:n1=1
请输入PQ结点数:n2=2
请输入平衡结点:isb=4
请输入精确度:pr=0.00001
请输入变比矩阵:K=[0 0 0 0;0 0 0 0.9625;0 0 0 0;0 0 0 0]
请输入支路阻抗矩阵:C=[0 0.02+0.06i 0.01+0.03i inf; 0.02+0.06i 0 0.03+0.07i 0.0+0.05i;0.01+0.03i 0.03+0.07i 0 0.02+0.05i;inf0.0+0.05i 0.02+0.05i 0]
注:inf表示两者未连接
请输入支路导纳矩阵:y=[0 0.01i 0.01i 0;0.01i 0 0 0;0.01i 0 0 0;0 0 0 0]
请输入结点电压矩阵:U=[1+0i 1+0i 1.02+0i 1.05+0i]
请输入各结点的功率:S=[-0.4-0.3i -0.3-0.2i 0.4 0]
结点导纳矩阵:
15.0000 -44.9800i -5.0000 +15.0000i -10.0000 +30.0000i 0
-5.0000+15.0000i 10.1724 -45.5871i -5.1724 +12.0690i 0+19.2500i -10.0000+30.0000i -5.1724+12.0690i 22.0690-59.3003i -6.8966
+17.2414i
0 0 +19.2500i -6.8966 +17.2414i 6.8966 -37.2414i
迭代中的雅克比矩阵:
-45.6000 15.0000 30.6000 -14.8000 5.0000
15.0000 -47.5228 12.3103 5.0000 -10.0690 30.6000 12.3103 -61.6961 10.2000 5.2759 15.2000 -5.0000 -10.2000 -44.3600 15.0000 -5.0000 10.2759 -5.2759 15.0000 -43.6513
-47.0810 15.9997 31.0813 -15.2043 5.2230 15.9335 -49.7730 12.7453 5.4214 -10.7713 31.3325 12.9466 -61.6961 10.0255 5.2705 16.0021 -5.2230 -10.7791 -46.4967 15.9997 -5.4214 11.3898 -5.7404 15.9335 -49.5407
-47.0173 15.9562 31.0611 -15.1794 5.2186 15.8961 -49.6806 12.7277 5.3988 -10.7412 31.3053 12.9190 -61.6961 10.0281 5.2725 15.9793 -5.2186 -10.7607 -46.4173 15.9562 -5.3988 11.3413 -5.7189 15.8961 -49.2810
-47.0171 15.9561 31.0610 -15.1793 5.2185 15.8960 -49.6802 12.7276 5.3989 -10.7411 31.3053 12.9190 -61.6961 10.0279 5.2724 15.9793 -5.2185 -10.7608 -46.4171 15.9561 -5.3989 11.3411 -5.7190 15.8960 -49.2802
-47.0171 15.9561 31.0610 -15.1793 5.2185
15.8960 -49.6802 12.7276 5.3989 -10.7411
31.3053 12.9190 -61.6961 10.0279 5.2724
15.9793 -5.2185 -10.7608 -46.4171 15.9561
-5.3989 11.3411 -5.7190 15.8960 -49.2802 迭代中的△P:
-0.2000 -0.1966 0.3015
-0.0011 0.0093 -0.0167
-0.0000 0.0000 0.0007
0.0000 -0.0000 -0.0000
0.0000 -0.0000 0.0000
迭代中的△Q:
0.3200 1.7358
-0.0078 -0.0838
-0.0000 -0.0002
-0.0000 -0.0000
-0.0000 -0.0000
迭代中相角:
-0.2633 -0.6194 0.4284
-0.2841 -0.6082 0.3890
-0.2829 -0.6074 0.3904
-0.2829 -0.6074 0.3903
-0.2829 -0.6074 0.3903
迭代中电压的模:
1.0199 1.0437
1.0191 1.0418
1.0191 1.0418
1.0191 1.0418
1.0191 1.0418
平衡结点的功率:
0.3149 + 1.5871i
全部线路功率分布:
0 -0.0254 - 0.3976i -0.3746 + 0.0768i 0 0.0281-0.4093i 0 -0.1049 - 0.4223i -0.2232 - 0.9571i 0.3761-0.1037i 0.1090 - 0.3729i 0 -0.0851 - 0.5879i 0 0.2232 + 0.9933i 0.0916 + 1.4207i 0
6 总结与体会
通过本次课程设计,我明白了老师说的“重中之重”——潮流计算。只有通过精密的设计和计算,才能保证电力系统的稳定性。此次设计加深了我对潮流计算的认识。尤其是在手工计算阶段,对于不懂的问题我都会向组长或者其他组员
虚心请教。求节点导纳矩阵,矩阵的逆,列雅克比方程,解修正方程等使我熟悉了重要公式。同时也是我对以前的知识梳理了一遍,获益颇多。
当然,在课程设计过程中发现自己存在许多不足。基础知识的不牢固,给我带来了不小的障碍。但是通过自己的努力以及同学们的帮助,我不仅解决了许多疑难问题,修补了知识漏洞,而且顺利完成课程设计。谢谢大家。
参考文献
[1] 何仰赞等.电力系统分析[M]. 武汉:华中理工大学出版社,2002.3
[2] 西安交通大学等.电力系统计算[M].北京:水利电力出版社,1993.12
全站仪极坐标放样施工工法
全站仪极坐标放样施工工法 一、前言 全站仪,即全站型电子速测仪。它是随着计算机和电子测距技术的发展,近代电子科技与光学经纬仪结合的新一代既能测角又能测距的仪器,它是在电子经纬仪的基础上增加了电子测距的功能,使得仪器不仅能够测角,而且也能测距,并且测量的距离长、时间短、精度高。全站型电子速测仪是由电子测角、电子测距、电子计算和数据存储单元等组成的三维坐标测量系统,测量结果能自动显示,并能与外围设备交换信息的多功能测量仪器。由于全站型电子速测仪较完善地实现了测量和处理过程的电子化和一体化,所以人们也通常称之为全站型电子速测仪或称全站仪。 随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种。全站仪极坐标法放样技术,能准确、方便的进行平面建筑网的控制,测量精度高、速度快、操作简便、安全、实用、不受场地限制、可直接放样,避免了繁琐的计算,值得在工程建设中推广应用。 二、工法特点 1. 实现了全站仪与计算机的双向通讯,测量人员只需要将全站仪瞄准相应目标,点取相应的按钮即可。避免了数据抄记、输入过程中的错误,简化了外业步骤,其数据处理快速准确、测量精度高、节省人工。
2. 能及时得出点位坐标和偏差信息,还可以结合放样点坐标进行反算,随时得出建议、纠正量,不受个人主观影响,便于操作指挥放样工作。 3. 建立了控制点、放样点的数据库,能方便地进行点位坐标以及实测资料的查询、管理,其定方位角快捷。 4. 仪器体积小重量轻,灵活方便,较少受到地形限制,且不易受处界因素的影响。 三、适用范围 1、全站仪极坐标放样施工,适用于各种土建、道桥施工放样,距离测量等;尤其是平面、立面复杂的施工测量,更能体现其优越性。 四、施工工艺 接合我公司在上海龙腾广场工程中运用全站仪极坐标放样施工的经验,我们对全站仪极坐标放样施工工艺作如下阐述: 1、工艺流程 利用AUTOCAD捕捉各控制点坐标→控制点位埋设→仪器安置与定向→控制点测定→坐标计算→测量成果提交→确定测量方法和线路→柱子、墙体、梁等轴线的定位放线→定位放线的质量控制 2、施工过程中应注意的问题 (1)施工准备 按要求,对全站仪等进行检测、校验和标定,使用满足使用规范标准的测量设备,确保工程总体质量、进度。 (2)施工操作 1)在建筑总平面图的电子文件中,先利用CAD捕捉、查询功能将所需要点的坐标自动捕捉下来。
测量学计算题及答案
五、计算题 5.已知某点位于高斯投影6°带第20号带,若该点在该投影带高斯平面直角坐标系中的横坐标y=,写出该点不包含负值且含有带号的横坐标y及该带的中央子午线经度 L。 1.已知某地某点的经度λ=112°47′,试求它所在的6°带与3°的带号及中央子午线的经度是多少 2.根据下表中的观测数据完成四等水准测量各测站的计算。
3.完成下表测回法测角记录的计算。 4.试算置仪器于M点,用极坐标法测设A点所需的数据。
已知300°25′17″,X M =,Y M =,X A =,Y A =,试计 五、计算题 1.某工程距离丈量容许误差为1/100万,试问多大范围内,可以不考虑地球曲率的影响。 2.调整下列闭合水准路线成果,并计算各点高程。 其中:水准点的高程H BM1 = 水准测量成果调整表 测点测站数 高差值 高程 m 备注观测值 m 改正数 mm 调整值m BM 1 N 1 N 2 N 3
N 4 BM 1 ∑ 实测高差∑h= 已知高差=H 终-H 始=0 高差闭合差f h = 容许闭合差f h 容== 一个测站的改正数= 3. 完成下表竖直角测量记录计算。 测站 目 标 竖 盘 位 置 竖盘读数 ° ′ ″ 半测回角值 ° ′ ″ 一测回角值 ° ′ ″ 指标 差 竖盘形式 O M 左 81 18 42 全圆式 顺时针 注记 右 278 41 30 N 左 124 03 30 右 235 56 54 4. 一根名义长为30米的钢尺与标准长度比较得实际长为米,用这根钢尺量得两点间距离为米,求经过尺长改正后的距离。
任意点极坐标法测设曲线
任意点极坐标法测设曲线 随着测距仪、全站仪的普及应用,任意点击坐标法测设曲线,已在生产者中得到了广泛应用。用这种方法的优点是:设站灵活,不受地形条件限制,主点和曲线点可同时测设。但应注意,由于测点彼此独立,应采用一定的方法检核,起点为误差不应大于5cm。 一、任意点极坐标法测设曲线的原理 如图1-1所示,M、N为已知的平面控制点,A 、B、C为待定曲线点,设M、N、A、B、C点在相同坐标系下的坐标均已知,则根据坐标反算可得坐标方位角:αM,N、αM,A、αM,B、αM、C。水平距离D M,A、D M,B、D M,C。测设时,置镜于M点,后视N点定向,定向后视读数配置为αM,N;旋转仪器当平盘读数为αM,A时,于视线方向上测设D M,A,得A 点;用同样方法可测出B、C等点。
1-1任意点极坐标法测设曲线原理 由此可见,任意点极坐标法测设曲线的关键问题是:统一坐标系下控制点、曲线点的坐标计算;测设数据计算。 一、 坐标计算 坐标系的建立主要取决于控制点的情况。如果控制点是为测设曲线而布设的,则坐标系一般采用ZH-xy 坐标系;如果控制点是既有控制点(如初测导线点),则控制点所在的坐标系就是统一坐标系,即既有坐标系统。 1. ZH-xy 测量坐标系下曲线点坐标计算 如图1-2所示,以始端缓和曲线ZH 为原点,以ZH 切线为X 轴,且指向交点方向为正向,建立测量中的平面直角坐标系ZH-xy ,则在此坐标系下,ZH-HY 段曲线点的坐标为: 错误!未找到引用源。 式1-1 错误!未找到引用源。 式中,l A 为A 点到缓和曲线起点的曲线长;l o 为缓和曲线长;R 为圆J α
全站仪极坐标法点位放样
全站仪极坐标法点位放样 一、实验目的和要求 (1)能根据放样点坐标数据,计算出用极坐标法放样元素 (2)掌握使用极坐标法进行点位放样的基本方法 (3)放样完毕后,都必须对所放样点位进行认真的校核 二、实验仪器 全站仪1台、棱镜及棱镜杆1根,测钎1根,木桩10个、计算器I个、记录板I块,铅笔1只 三、测量资料收集与放样方案制定 (1)测量放样前.应从合法、有效的途径获取施工区已有的平面和高程控制成果资料 (2)应根据现场控制点标志是否稳定完好等情况,对已有的控制点资料进行分析,从而确定是否全部或部分对控制点进行检测 (3)如已有控制点不能满足精度要求应重新布设控制;如已有的控制点密度不能满足放样需要时应根据现有的控制点进行加密 (4)应根据规范规定和设计的精度要求,并结合人员及仪器设备情况制定测量放样方案。其内容应包括控制点的检测与加密、放样依据、放样方法及精度估算、放样程序、人员及设备且等 四、放样前准备工作 (1)阅读设计图纸 (2)选定测量放样方法并计算放样数据、绘制放样草图 (3)准备仪器和工具,使用的仪器必须在有效的检定周期内。给仪器充电,检查仪器常规设置如单位、坐标方式、补偿方式、梭镜类型、梭镜常数、湿度、气压等 (4)提前将控制点(包括拟用的测站点、检查点)和放样点的坐标数据输人仪器内存,并检查 五、放样步骤 (1)在控制点上架设全站仪并对其进行对中整平,初始化后应检查仪器设置,如湿度、气压、棱镜常数等.输入(或调入)测站点的三维坐标,量取并输入仪器高,输入(调入)后视点坐标,照准后视点进行后视定向。如果后视点上有梭镜,输入棱镜高时.可以马上测定后视点的坐标和高程并与已知数据检核 (2)瞄准另一控制点,检查方位角或坐标;在另一已知高程点上竖梭镜或尺子.检查仪器的视线高。利用仪器自身计算功能进行计算时,记录员也应进行相应计算,以检核输入数据的正确性 (3)记录员根据测站点和拟放样点坐标反算出测站点至放样点的距离和方位角 (4)观测员转动仪器至第一个放样点的方位角,指挥司镜员移动棱镜至仪器视线方向上,测It平距O (5)计算实测距离D与放样距离D,的差位:GD-D-D',指挥司镜员在视线上前进或后退△D (6)重复过程(5),直到△D小于放样限差 (非坚硬地面此时可以打桩) (7)检查仪器的方位角值,梭镜气泡严格居中(必要时架设三脚架),再侧It一次.若△D小于限差要求,则可精确标定点位,在桩上打入一铁钉 (8)测量并记录现场放样点的坐标和高程,与理论坐标比较检核。确认无误后在标志旁加注记 (9)重复(3)- (8)的过程,放样出该测站上的所有待放样点 (10)如果一站不能放样出所有待放样点,可以在另一测站点上设站继续放样,但开始放样前
施工测量方案极坐标法
智能医疗设备研发生产项目 施 工 测 量 方 案 编制人: 审核人: 审批人: 2017年5月27日
目录 第一章编制依据 0 第二章工程概况 0 第三章施工组织及设备配置 0 第四章测量放线基本准则 (1) 第五章测量准备 (1) 第六章平面控制点的布置与施测 (2) 第七章轴线及各控制线的放样 (5) 第八章轴线及高程点放样程序 (13) 第九章施工时的各项限差和质量保证措施 (14) 第十章竣工测量与变形观测 (15) 第十一章质量控制 (16) 第十二章安全管理及安全保护措施 (17)
第一章编制依据 1、智能医疗设备研发生产项目工程施工组织设计 2、智能医疗设备研发生产项目工程施工蓝图、基坑支护设计图 3、《工程测量规范》GB50026-2007 4、《高层建筑混凝土结构技术规程》JGJ3-2010 5、江苏溧阳城建集团有限公司质量保证手册及有关程序文件 第二章工程概况 1、工程名称:智能医疗设备研发生产项目 2、工程地点:西安市尚林路以南、草滩六路以西 3、建设单位:西安天隆科技有限公司 4、设计单位:中国城市建设研究院有限公司 5、勘察单位:中国有色金属工业西安勘察设计研究院 6、监理单位:陕西华营工程建设监理有限公司 7、施工单位:江苏溧阳城建集团有限公司 8、工程标高:本工程1#厂房、8#厂房、9#厂房、10#厂房、11#办公楼、12#厂房的±0.000相当于绝对标高分别为375.270、375.350、375.200、374.900、375.200、375.200。本工程所有相对标高均以8#厂房±0.000标高为基准。 9、本工程主体为钢筋混凝土框架结构,约54316.2平方米。其中地下一层(汽车库、设备用房):12513.08m2;1#厂房:7375.48m2;8#厂房:6106.76m2;9#楼:5897.56m2;10#楼:5542.66m2;11#楼:8100.07m2;12#楼:8780.59m2。 建筑楼层:1#厂房地上5层、地下1层;8#厂房地上5层、地下1层;9#厂房地上5层、地下1层;10#厂房地上5层、地下1层;11#办公楼地上6层、地下1层;12#厂房地上6层、地下1层。 建筑高度:1#厂房23.45m;8#厂房23.45m;9#厂房23.45m;10#厂房23.45m;11#办公楼27.95m;12#厂房27.95m。 建筑工程结构安全设计等级:二级,设计使用年限:50年。建筑耐火等级为:一级。屋面防水等级:Ⅱ级。抗震设防烈度:8度,设计基本地震加速度为0.20g。建筑使用功能:1#、8#、9#、10#、12#楼为厂房、11#楼为办公用房,各主楼地下室为设备用房,中心区域为车库。 施工单位进场时,与建设单位坐标和高程控制点已办理交接手续,共二个坐标和黄海高程控制点。位于场地东侧的草滩六路旁,1#点(BM1坐标:X=21917.997、Y=6090.271;高程:374.044m);2#点(BM2坐标:X=21995.614、Y=6052.690;高程:374.089m); 第三章施工组织及设备配置 1、主要仪器的配备情况
《极坐标法测设圆曲线》教学设计(教师用)
《极坐标法测设圆曲线》教学设计(教师用) 授课教师 课程名称 道路线路施工测量 项目2线路中线 学习单元 任务2.2 极坐标法测设圆曲线 学时 讲课4h,实作(课内6h,课外26h) 学习目标 通过案例教学使学生学会极坐标法测设圆曲线的程序、内容及实施;能利用现有的 测量仪器设备组织实施极坐标法测设圆曲线 主要内容描述 线路通常是由直线元、缓和曲线元、圆曲线元组成,本任务主要学习由直线和圆曲线组合的直线-圆曲线-直线的形式的曲线要素计算、主点里程推算、极坐标法测设圆曲线的原理及测设资料的计算。 教学参考资料 ①极坐标法测设圆曲线讲义 ②《工程测量概论》西安地图出版社 李孟山主编 ③《工程测量规范》 ④《铁路工程测量规范》 TB 10101-2009 J961-2009 中国铁道出版社出版 教师具备的能力 ①能熟练操作经纬仪、全站仪; ②能根据设计单位给定的直线、曲线转角表计算圆曲线段逐桩坐标 ③会利用CASIO-5800计算器、EXCEL 表、VB 编写圆曲线逐桩坐标程序; ④熟悉《铁路测量》规范。 项目保障条件 1、 教学条件要求 ①多媒体教室; ②极坐标法测设圆曲线PPT ③《新建铁路施工测量规范》 ④《**高速公路线路平面设计资料) 2、 实训条件 ①(ppm 22,2+''±)全站仪6台; ③2公里线路测量实训场; 学习重点与难点 1.学习重点: ①圆曲线测设点位坐标计算; ②圆曲线测设方法; 2.学习难点: ①圆曲线测设点位坐标计算; 教学方法建议 引导文法、头脑风暴法、讨论法、任务驱动教学法 教 师 学 生 教 学 实 施 建 议 构思 (课内4h,课外6h) 1. 结合班级学生学习状况,划分任务学习小组(建议6人一组),设组长一名; 2. 首先结合石黄高速公路案例,给每个小组,下发极坐标法测设圆曲线任务(课外30m ); 3.结合本节任务给学生下发知识关键点,使学生通过网络、讲义、案例、讨论对关键知识点初步了解(课外1h ); 4.每个小组简要汇报对知识点了解情况 1.组长召集小组成员,布置小组分工; 2.课前以小组为单位,通过网络、讲义、《规范》、案例、思考、讨论、督促预习如下内容: ①在地面上如何表示一个半径为500米的圆弧; ②如何进行两个坐标系下坐标变换; ③求一个点的坐标需要已知哪些数据; ④如何计算圆心坐标;
极坐标法点放样
工程测量实习报告 ———经纬仪极坐标放样 班级:测量10029班 学号: 10040232910 姓名:张浩 指导老师:杨晓平
一、实训目的 为了更好的将理论与实践相结合,安排了本次的教学实训,本次实训是使用全站仪进行一般极坐标点位实地放样实训。通过现场的实际操作能够使我们更熟练的掌握极坐标法一般点位放样。 二、班级、时间、地点 (一)实习班级和时间 测量10029班(第八周、4月10号) (二)实习地点 杨凌职业技术学院南校区 三、放样数据 =3992.798 (一)、放样点坐标:X P =5695.600 Y P =3923.008 (二)、测站坐标:X A =5607.606 Y A =3972.102 后视点坐标:X M Y M=5458.367
方位角:α =288°12′33″ AM αAP=51°34′52″ -αAP=236°37′41″ 水平夹角:β=α AM 距离:D=Y 2 =112.310 △2 X △ 四、实习过程 一、极坐标法一般点位放样 (一)、操作步骤: 1、将仪器安置于点A,在M点立照准目标定向,读为取水32°22′18″ 2、顺时针转动照准部,使水平度盘读数为268°59′59″ 3、沿视线方向用钢尺量取距离D:112.310米,标定P点(二)、附图 A△ P 1 P2 M△
二、归化放样 1、用一般放样方法标定点P 1 2、方向归化,用测回法测出β 测 =268°59′48″ △β=β-β 测 =268°59′59″-268°59′48″=+11″ 归化△β,顺时针微调(外测)+11″,标定P 2 3、距离归化,量取 A P 2为D 测 ,△ D=D-D 测 =112.310-112.285=0.015米,沿视线方向量△D,标 定P 3 4、检核△β、△D,若误差不符合要求则继续归化 四、实训总结 通过本次实习,使我们将以前学习的坐标测量知识转换为坐标的放样。将理论和实践进行结合,了解测绘和测设的区别,将地形测量的知识和工程测量的知识进行融合。使得两者相结合,即会测坐标点也会放坐标点。 用经纬仪极坐标发放样出设计坐标,并对放样出的角度和距离进行测量,比较误差和精度。让我学到了很多实实在在的东西,对以前零零碎碎学的测量知识有了综合应用的机会,工程测量测设过程有了一个良好的了解。学会了运用经纬仪的基本测设方法等在课堂上无法做到的东西以及更熟练的使用经纬仪,也对钢尺量距的知识进行了回顾。很好的巩固了理论教学知识,提高实际操作能力,同时也拓展了与同学之间的交际合作的能力。
点位放样的常规方法
点位放样的常规方法 一、实验目的 1、练习并掌握极坐标法、距离交会法、角度交会法放样要素的计算方法。 2、练习使用普通光学经纬仪及工具,依极坐标法、距离交会法、角度交会法放样点位 的操作方法。 3、练习极坐标法、距离交会法、角度交会法放样的点位归化改正操作。 二、实验任务 1、在选定的实验区域构建两个控制点,给定其已知坐标,设计可控范围内的放样点坐 标。 2、根据已知控制点坐标和设计点位坐标,分别计算极坐标法、距离交会法、角度交会 法对应的放样数据。 3、练习极坐标法、距离交会法、角度交会法放样及其归化改正的操作(包括归化改正 量的计算)。 三、仪器与工具 仪器:每组全站仪1台、棱镜2个、对中杆1个、皮尺(钢卷尺)1把 其他:记录板1个、计算器、粉笔、铅笔、记录纸、记录表格 四、实验相关资料 1、极坐标法放样及其归化(见教材6.2.2.3 极坐标法及6.2.2.2 归化法) 归化:精测角度和距离,计算坐标,以坐标偏差为其归化改正量。 2、距离交会法及其归化(见教材6.2.2.1 交会法及6.2.2.2 归化法) 归化:精测 3、角度交会法及其归化(见教材6.2.2.1 交会法及6.2.2.2 归化法) 归化:精测 五、具体要求 1、受实验现场的条件所限,本实验的坐标系统采用独立坐标系统,但控制点坐标及设 计点位坐标均应从AutoCAD数字地形图中获取,或根据现场情况确定。 2、图上控制点的选取,应顾及其与相邻明显地物点的邻接关系,以便在具体实施中确 定其现场位置。 3、极坐标法、距离交会法和角度交会法放样的实施均可基于这两个控制点。
4、每种方法的放样点位宜做适当改变,每种方法放样的点位不宜少于4个,且放样点 位应构成一定的结构图形(如建筑物轮廓点等),其坐标从控制点所在的AutoCAD数字地形图中获取。 5、各类方法对应的放样要素必须及时计算完毕,并体现在所设计的实验方案中。 6、设定布置控制点时,应根据设计控制点与邻近明显地物点的邻接关系,首先固定一 个点位。然后沿着所设计的大概方向,采用钢尺量距往返丈量而确定另一个控制点,往返测较差应小于5mm。 7、每种方法所对应的归化改正,可选取部分放样点进行练习,但不宜少于1~2点。 8、对于拟进行归化改正的放样点位:粗略放样可采用皮尺量距,单程粗测;角度采用 单盘面观测(半测回);归化调整点位推荐使用钢尺量距,但顾及现场车流量影响,读到mm,往返测较差应小于1cm;角度观测应至少进行1测回。务必带计算器,依据观测数据及时计算归化改正量。 9、对于不再进行归化的放样点位,初次放样应尽可能准确:角度放样采用“盘左、盘 右分中法”;距离放样采用钢尺量距,读到mm,往返测较差应小于1cm。 六、上交资料 每人交实验报告1份+外业观测记录1份。 七、实验报告格式要求 采用统一格式,实验时间、班级、作业小组、实验人员姓名等信息必须填写完整。 实验目的 实验仪器及工具 实验步骤(要求:简单而明确) 实验数据及成果(角度交会、距离交会的归化示意图要求每人绘制一份) 收获与体会
测量极坐标法
二、极坐标法 极坐标法是根据一个角度和一段距离测设点的平面位置。当建筑场地开阔,量距方便,且无方格控制网时,可根据导线控制点,应用极坐标法测设点的平面位置。如图9-7所示,A 、B 、C 为地面已有控制点(导线点),其坐标(A A y x 、)、(B B y x 、)、(C C y x 、)均为已知。P 为某建筑物欲测设点,其坐标(P P y x 、)值可从设计图上获得或为设计值。根据A 、B 、P 三点的坐标,用坐标反算方法求出夹角β和距离AP D ,计算公式如下: 坐标方位角 A B A B AB AB x x y y --=-1tan αα (9-11) A p A P AP AP x x y y --=-1tan αα (9-12) 两方位角之差即为夹角β: AP AB ααβ-= (9-13) 两点间的距离AP D 为: ()()22A P A P AP y y x x D -+-= (9-14) 【例题9-5】已知A、B为控制点,其坐标值为=A x 858.750m 、A y =613.140m ;B x =825.432m 、B y =667.381m ;P 点为放样点,其设计坐标为P x =430.300m 、P y =425.000m 。计算在A 点设站,放样P 点的数据。 A B A B AB AB x x y y --=-1tan αα==---750.858432.825140.613381.667tan 1AB α121°33′38″ A p A P AP AP x x y y --=-1tan αα==---750.858300.430140.613000.425tan 1AP α203°42′26″
全站仪极坐标放样施工方法经验介绍
全站仪极坐标放样施工方法经验介绍 一、前言 全站仪,即全站型电子速测仪。它是随着计算机和电子测距技术的发展,近代电子科技与光学经纬仪结合的新一代既能测角又能测距的仪器,它是在电子经纬仪的基础上增加了电子测距的功能,使得仪器不仅能够测角,而且也能测距,并且测量的距离长、时间短、精度高。全站型电子速测仪是由电子测角、电子测距、电子计算和数据存储单元等组成的三维坐标测量系统,测量结果能自动显示,并能与外围设备交换信息的多功能测量仪器。由于全站型电子速测仪较完善地实现了测量和处理过程的电子化和一体化,所以人们也通常称之为全站型电子速测仪或称全站仪。 随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种。全站仪极坐标法放样技术,能准确、方便的进行平面建筑网的控制,测量精度高、速度快、操作简便、安全、实用、不受场地限制、可直接放样,避免了繁琐的计算,值得在工程建设中推广应用。 二、方法特点 1.实现了全站仪与计算机的双向通讯,测量人员只需要将全站仪瞄准相应目标,点取相应的按钮即可。避免了数据
抄记、输入过程中的错误,简化了外业步骤,其数据处理快速准确、测量精度高、节省人工。 2. 能及时得出点位坐标和偏差信息,还可以结合放样点坐标进行反算,随时得出建议、纠正量,不受个人主观影响,便于操作指挥放样工作。 3.建立了控制点、放样点的数据库,能方便地进行点位坐标以及实测资料的查询、管理,其定方位角快捷。 4.仪器体积小重量轻,灵活方便,较少受到地形限制,且不易受处界因素的影响。 三、适用范围 1、全站仪极坐标放样施工,适用于各种土建、道桥施工放样,距离测量等;尤其是平面、立面复杂的施工测量,更能体现其优越性。 四、施工工艺 接合我公司在上海龙腾广场工程中运用全站仪极坐标放样施工的经验,我们对全站仪极坐标放样施工工艺作如下阐述: 1、工艺流程 利用AUTOCAD捕捉各控制点坐标→控制点位埋设→仪器安置与定向→控制点测定→坐标计算→测量成果提交→确定测量方法和线路→柱子、墙体、梁等轴线的定位放线→定位放线的质量控制
极坐标放样
第十二题:极坐标法放样点的平面位置 1.考核内容 (1)根据2个已知点的坐标及实地点位,测设出某给定坐标的点的平面位置。(2)用经纬仪和钢尺或全站仪,若使用全站仪则不需计算,考核时间要相应减半。 (3)完成该工作的计算和放样,并在实地标定所测设的点位。 (4)对中误差≤±3mm,水准管气泡偏差﹤1格。 2.考核要求 (1)操作仪器严格按观测程序作业;计算用“不能编程的科学计算器”进行计算; (2)记录、计算完整、清洁、字体工整,无错误; (3)实地标定的点位清晰。 3.考核标准 (1)以时间T为评分主要依据,如下图表,评分标准分四个等级制定,具体分 (2)根据对中误差情况,扣1~3分;根据标定的点位的清晰情况扣1~2分。(3)根据水准管气泡偏差情况,扣1~2分。 (4)根据卷面整洁情况,扣1~5分。(记录划去1处,扣1分,合计不超过5分。) 4.考核说明 (1)考核过程中任何人不得提示,各人应独立完成仪器操作、记录、计算及校核工作; (2)主考人有权随时检查是否符合操作规程及技术要求,但应相应折减所影响的时间; (3)若有作弊行为,一经发现一律按零分处理,不得参加补考; (4)考核前考生应准备好钢笔或圆珠笔、计算器,考核者应提前找好扶尺人;(5)考核时间自架立仪器开始,至递交记录表并拆卸仪器放进仪器箱为终止; 型或全站仪; (6)考核仪器经纬仪为DJ 2 (7)数据记录、计算及校核均填写在相应记录表中,记录表不可用橡皮檫修改,记录表以外的数据不作为考核结果; (8)主考人应在考核结束前检查并填写仪器对中误差及水准管气泡偏差情况,在考核结束后填写考核所用时间并签名。 (9)样题——考核时,现场任意标定两点为M、N,在M点设站后视N点,放样出一点A。已知M(14.265,87.375),N(20.659,76.329),A(29.476,85.208),试在M点设站后视N点,放样出A点。
极坐标法测设数据计算
极坐标法测设数据计算 日期:2017年 9月2日 仪器编号: 观测者:赵文凯 边坐标增量水平距离坐标方位角水平夹角 AB28.63928.63931.045337°17′38″ AP-9.663-13.08516.26653°33′18″76°15′40″ AQ-27.249-3.34227.4516°59′32″29°41′54″ AS-12.317-21.31924.62159°58′59″81°41′21″ AR-27.891-17.26232.80134°45′13″57°27′35″ A、B为已知点, P、Q、S、R、为测设点 测 设 略 图
极坐标法测设数据计算 日期:2017年 9月1日 仪器编号: 观测者:徐顺捷 边坐标增量水平距离坐标方位角水平夹角AB21.47347.34251.98465°36′8″ AP-3.78821.41121.744280°1′93″214°26′25″AQ-1.65433.51133.552272°49′32″207°13′24″AS-22.97515.54423.739325°55′9″260°19′1″AR-12.01610.67616.074318°22′46″252°46′38″ A,B为已知点,P、Q、S、R为测设点 测 设 略 图
极坐标法测设数据计算 日期: 2017年9月 1日 仪器编号: 观测者:彭晟赟 计算 边坐标增量水平距离坐标方位角水平夹角AB9.978-15.36818.323122°59′40″ AP-8.321 6.20010.377323°18′36″200°18′40″AQ-10.24511.96515.740310°34′18″187°34′38″AS-6.5457.3119.812311°50′09″188°50′29″AR-7.89912.37414.680302°33′8″179°33′28″ A、B为已知点 P、Q、S、R为测设点 测 设 略 图 极坐标法测设数据计算 日期: 2017年9月 1日 仪器编号: 观测者:胡启成 计算
全站仪放样方法
全站仪放样方法
全站仪简介: 仪器面板外观和功能说明 面板上按键功能如下: ——进入坐标测量模式键, ——进入距离测量模式键, ANG ——进入角度测量模式键, MENU ——进入主菜单测量模式键, ESC ——用于中断正在进行的操作,退回到上一级菜单, POWER ——电源开关键, ——光标左右移动键 , ▲▼——光标上下移动、翻屏键, F1 、 F2 、 F3 、 F4 ——软功能键,其功能分别对应显示屏上相应位置显示的命令, 1---9 代表数字字母键,其功能分别对应输入数字与其下面所对应的字母。 显示屏上显示符号的含义: V ——竖盘读数;HR ——水平读盘读数(右向计数);HL ——水平读盘读数(左向计数); HD ——水平距离; VD ——仪器望远镜至棱镜间高差; SD ——斜距; * ——正在测距; N ——北坐标,x ; E ——东坐标,y ; Z
——天顶方向坐标,高程H 。 测站点:仪器对中器对准的点就是测站点。(例图B:测站点C) 后视点:仪器用来确定现场北方向的点就是后视点。(例图B,已知点A,当用全站仪望远镜瞄准 A点后,就是确定了仪器所对的北方向为N1方向。) 放样点:只知道图纸上坐标,而不知道现场位置,需要把坐标所对应的位置在现场标定出来的点就是放样点。(例图B,放样点P1) 全站仪坐标表示跟图纸坐标对应关系:N(北坐标) —X , E(东坐标)--Y , Z(天顶方向坐标)—标高。 测站点和后视点必须满足的条件:知道两个点的现场位置和坐标,两点之间必须相互看得见。 全站仪的两个最基本的功能:放样和数据采集。 放样:已知现场两个点的位置和坐标:把知道坐标而不知道现场位置的点在现场的位置标定出来的工作就是放样。{ 如图B所示,我们已知点 A和点C两点在现场的位置和坐标,还知道P 1点的坐标,我们可以通过在C点架设全站仪作为
测量施工工艺标准
第一章建筑工程测量施工工艺标准 1 定位控制测量施工工艺标准 1.1 适用范围 本工艺适用于工业与民用建筑物的定位控制测量。 1.2 施工准备 1.2.1 技术准备: 1.2.1.1 熟悉设计图纸 按图施工的原则,确定了施工测量的依据是建筑施工图纸。因此,定位前应该熟悉设计图纸,理解设计意图,明确设计要求。 1.2.1.2 阅读设计图纸 1)建筑总平面图 查清建筑物所在的位置,与相邻地物的关系,施工场地平面控制点和高程控制点的分布等。设计总平面图是施工放样的总体依据,建筑物是根据该图所给定的尺寸关系定位的。 2)建筑平面图 查清建筑物的大小、形状与特征,建筑内部分隔状况,纵、横轴线的数量及其相互关系等。 3)审核设计图纸的相关尺寸 在阅读设计图纸时,还应仔细地核对图纸。假若发现问题,那么应及时地向设计单位反映,由设计人员处理。审核尺寸的要点: ①查对分尺寸之和与总尺寸是否相符。 ②查对有关图纸的相关尺寸有无矛盾,标高是否一致。 ③查对有无遗漏尺寸。 1.2.1.3 查清定位的依据
在定位之前,应查清建筑物的定位依据,建筑区内平面控制点、高程控制点及其相关资料,以便拟定测设方案,计算测设数据。 1.2.1.4 现场踏勘 踏勘时应了解施工场地的地形情况,察看周围环境,以及与周围地物的关系。了解控制点的位置,分布状况,以及检查标志的稳定性。假若踏勘时发现测线方向有障碍物,或者地面起伏不平,那么应及时清理,或对场地进行平整。 1.2.1.5 拟定测设方案,计算测设数据 在综合考虑设计要求、定位条件、现场地形和施工方案的基础上,研究拟定测设方案。测设方案必须保证定位精度,满足施工进度计划要求。同时,使测设数据计算简便,测设方法简单易行,以及具有必要的检核条件。由于基本定位点的放样都是采用极坐标法进行,所以测设数据的计算主要是要满足极坐标法放样。 1.2.2 主要仪器设备:全站仪及配套棱镜,水准仪及配套水准尺。 1.2.3 作业条件: 1.2.3.1 施测人员必须有相应的测量等级资格证书。 1.2.3.2 首先,要保证仪器和工具的品种与数量。其次,应对选用的仪器和工具进行必要的检查、检验与校正,保证能正常使用并满足精度要求。对于建筑物的定位测量与轴线控制测量通常采用的全站仪及配套的棱镜。 1.3 施工工艺流程 →→→→ 1.4 施工工艺要点 建筑定位测量,就是按照设计和施工的要求,将设计的建筑物位置、形状、大小标定出来,以便进行施工。由于测距精度的提高,同时全站仪的普遍采用,使得极坐标法成为建筑物定位测量的主要方法。 1.4.1 极坐标法放样基本定位点
测量极坐标法
测量极坐标法Last revision on 21 December 2020
二、极坐标法 极坐标法是根据一个角度和一段距离测设点的平面位置。当建筑场地开阔,量距方便,且无方格控制网时,可根据导线控制点,应用极坐标法测设点的平面位置。如图9-7所示,A 、B 、C 为地面已有控制点(导线点),其坐标 (A A y x 、)、(B B y x 、)、(C C y x 、)均为已知。P 为某建筑物欲测设点,其坐标(P P y x 、)值可从设计图上获得或为设计值。根据A 、B 、P 三点的坐标,用坐标反算方法求出夹角β和距离AP D ,计算公式如下: 坐标方位角 A B A B AB AB x x y y --=-1 tan αα (9-11) A p A P AP AP x x y y --=-1 tan αα (9-12) 两方位角之差即为夹角β: AP AB ααβ-= (9-13) 两点间的距离AP D 为: ()()22A P A P AP y y x x D -+-= (9-14)
【例题9-5】已知A、B为控制点,其坐标值为=A x 、A y =;B x =、B y =;P 点为放样点,其设计坐标为P x =、P y =。计算在A 点设站,放样P 点的数据。 A B A B AB AB x x y y --=-1 tan αα==---750.858432.825140.613381.667tan 1AB α121°33′ 38″ A p A P AP AP x x y y --=-1 tan αα= = ---750.858300.430140 .613000.425tan 1 AP α203°42′ 26″ AP AB ααβ-==121°33′38″+360°-203°42′26″=277°51′12″ ()()m y y x x D A P A P AP 938.467)140.613000.425()750.858300.430(2 22 2=-+-=-+-= 测设方法:将经纬仪安置于控制点A ,照准B 点定向,采用正倒镜分中法测设β角值,沿分中方向用钢尺测设距离AP D ,定出P 点在地面上的位置。此法适用于量距方便、距离较短的情况,是一种常用的方法。使用全站仪极坐标法测设点的位置在工程施工中已是主要方法。
点的平面位置的放样方法 - 实验教学示范中心
点的平面位置的放样方法 施工之前,需将图纸上设计建(构)筑物的平面位置测设于实地,其实质是将该房屋诸特点(例如各转角点)在地面上标定出来,作为施工依据。放样时,应根据施工控制网的形式、控制点的分布、建(构)筑物的大小、放样的精度要求及施工现场条件等因素,选用合理的,适当的方法。 (一)直角坐标法 用已知坐标差△x、△y测设点位。当根据建筑方格网或矩形控制网放样时,采用此法准确、简便。如图10-21,已知某厂房矩形控制网四角点A、B、C、D的坐标,设计总平面图中已确定某车间四角点1、2、3、4的设计坐标。现以根据B点测设点1为例,说明其放样步骤: 1.先算出B与点1的坐标差: 2.在B点安置经纬仪,瞄准C点,在此方向上测设距离值△x B1得E点。 3.在E点安置经纬仪,瞄准C点,用盘左、盘右位置两次向左测设90°角,在两次平均方向E1上从E点起测设距离值△x B1,即得车间角点1。 4.同法,从C点测设点2,从D测设点3,从A点测设点4。 5.检查车间的四个角是否等于90°,各边长度是否等于设计长度,若误差在允许范围内,即认为放样合格。 (二)极坐标法 本法系根据已知水平角度和水平距离测设点位。测设前须根据施工控制点(例如导线点)及测设点的坐标,按坐标反算公式求出ij 方向的坐标方位角αij和水平距离D ij再根据坐标方位角求出水平角。如图10-22,水平角β=αAP-αAB,水平距离为D AP。
求出放样数据β、D 后,即可安置经纬仪于控制点A ,测设β角,以定出AP 方向。在AP 方向上,从A 点起用钢尺测设水平距离D AP 定出P 点的位置。 设计建筑物上各点测设之后,应按设计建筑物的形状、尺寸检核角度和长度误差,若在允许范围内,才认为放样合格。 (三) 角度交会法 该法是在两个已知点上设站,以两个已知得水平角度测设放样点位的方法,适应于许多场合。但必须有第三个方向进行检核,以免放样发生错误。 如图10-23,A 、B 、C 为三个控制点,其坐标为已知,P 为待放样点,其设计坐标亦为已知。先用坐标反算公式求出αAP 、αBP 和αCP ,为了保证计算的准确性,可以采用下式检核反算的方位角: ij ij ij ij ij y x y x tg ?-??+?=+)45(α (10-14) 然后由相应的坐标方位角之差求出放样数据β1、β2、β3与β4。 AP AB ααβ-=1, BA BP ααβ-=2 BP BC ααβ-=3, CB CP ααβ-=4
第十二题:极坐标法放样点的平面位置
极坐标法放样点的平面位置考核 1.考核内容 (1)根据2个已知点的坐标及实地点位,测设出某给定坐标的点的平面位置。(2)用经纬仪和钢尺或全站仪,若使用全站仪则不需计算,考核时间要相应减半。 (3)完成该工作的计算和放样,并在实地标定所测设的点位。 (4)对中误差≤±3mm,水准管气泡偏差﹤1格。 2.考核要求 (1)操作仪器严格按观测程序作业;计算用“不能编程的科学计算器”进行计算; (2)记录、计算完整、清洁、字体工整,无错误; (3)实地标定的点位清晰。 3.考核标准 (1)以时间T为评分主要依据,如下图表,评分标准分四个等级制定,具体分数由所在等级内插评分,表中M代表分数。 (3)根据水准管气泡偏差情况,扣1~2分。 (4)根据卷面整洁情况,扣1~5分。(记录划去1处,扣1分,合计不超过5分。) 4.考核说明 (1)考核过程中任何人不得提示,各人应独立完成仪器操作、记录、计算及校核工作; (2)主考人有权随时检查是否符合操作规程及技术要求,但应相应折减所影响的时间; (3)若有作弊行为,一经发现一律按零分处理,不得参加补考; (4)考核前考生应准备好钢笔或圆珠笔、计算器,考核者应提前找好扶尺人;(5)考核时间自架立仪器开始,至递交记录表并拆卸仪器放进仪器箱为终止; 型或全站仪; (6)考核仪器经纬仪为DJ 2 (7)数据记录、计算及校核均填写在相应记录表中,记录表不可用橡皮檫修改,记录表以外的数据不作为考核结果; (8)主考人应在考核结束前检查并填写仪器对中误差及水准管气泡偏差情况,在考核结束后填写考核所用时间并签名。 (9)样题——考核时,现场任意标定两点为M、N,在M点设站后视N点,放样出一点A。已知M(14.265,87.375),N(20.659,76.329),A(29.476,85.208),试在M点设站后视N点,放样出A点。
极坐标法线路测设
目录 摘要 (ⅰ) Abstract (ⅱ) 1 绪论 (4) 2 线路测量的理论与方法 (5) 2.1地形图上选线(踏勘) (5) 2.2测绘带状地形图(初测) (5) 2.3设计路线中线(定线) (6) 2.3.1 纸上定线 (6) 2.3.2 现场定线 (7) 2.4放线、中线测量、测纵断面图(定测) (7) 2.4.1 放线 (7) 2.4.2 中线测量 (7) 2.4.3 纵断面高程测量 (8) 2.4.4 横断面测量 (8) 2.4.5 路基设计 (8) 3 曲线测设 (9) 3.1极坐标法 (9) 3.2坐标正算与坐标反算 (11) 3.2.1 坐标正算公式 (11) 3.2.2 坐标反算公式 (11) 3.3曲线的种类 (12) 3.4圆曲线要素及应用公式 (12)
3.4.1 线上点线名称 (12) 3.4.2 曲线的放样步骤 (13) 3.4.3 圆曲线要素计算 (13) 3.4.4 圆曲线主点里程的计算 (13) 3.4.5 圆曲线主点的放样 (13) 3.4.6 圆曲线的详细放样 (14) 3.5有缓和曲线的圆曲线要素及其应用公式 (15) 4 中线坐标的模型及理论 (18) 4.1现在介绍缓和曲线部分的中线点放样方法 (18) 4.2有缓和曲线的圆曲线上中线点的放样方法 (19) 5 程序使用说明及实例 (19) 5.1程序使用说明 (20) 5.1.1 程序设计窗体 (20) 5.1.2程序的使用说明 (20) 5.2计算实例 (21) 5.2.1 圆曲线的计算 (21) 5.2.2 带有缓和曲线的圆曲线 (21) 5.3程序代码 (22) 参考文献 (34)
任意点极坐标法测设曲线
第七节任意点极坐标法测设曲线 §11-7 任意点极坐标法测设曲线 特点:这种方法灵活,效率高,宜广 泛推广使用。 一、基本原理: 1、直角坐标系:坐标原点:ZH点 (HZ),如图11-29 x轴:切线(ZH JD), y轴:切线的垂线方向。 2、测站点的设置: 1)在曲线一侧(内侧或外侧)任选一点E(与各曲线点通视),打桩、钉钉; 2)置镜ZH,测出以x轴为竖轴的方位角αZH-E及水平距离d ZH-E, 测角两个测回;测距往返测;测设E点的点位打桩、钉钉; 3、计算测站E点的坐标:据ZH点的坐标计算测站E点坐标 4、计算曲线点坐标; 5、反算所需的测设角度θi及边 长d i,据x E、y E及曲线上各点 坐标x i、y i,反算出所需的测设角 度θi及边长d i。 6、极坐标法测设曲线点。E点 置镜用极坐标法逐一测设曲线 点。 二、测设具体步骤及方法 [例]: 某曲线,半径R=500m,缓和 曲线长l0=60m,转向角α右 =28°36′20″,ZH点里程为: K33+424.67,仪器置于E点,设直角坐标系: ZH点为原点,ZH-JD为纵轴x ,测得ZH-E 边的长d=100m,坐标方位角=60°。如图11一30。 解: 1. 计算测站点E的坐标: 2. 计算测点的坐标 1)在缓和曲线上, 按10m测设一个点,则l=10m。由公式11-6计算(也可查曲线表切线支距法测设用表)表11-8 例:1点的坐标:R=500, l=60, l i=10, 20…
2)在圆曲线上,按10m测设一个点,则l=10m。由公(11-14)计算(也可查曲线表切线支距法测设用表)表11-8 式中 例: 7点的坐标: l 0=60, β0=3°26'15.89'' , p=0.3, m=29.996m l i=70, x7=69.95, y7=1.90 l i=80, x8=79.91, y8=2.80 l i=90, x9=89.85, y9=3.90 l i=100, x10=99.77, y10=5.19 3.反算测设角度θi及边长d i 根据测站E及测点i 的坐标,后视ZH点, 例求:θ1、d1。 已知αZH-E = 60o,则:αE-ZH = 240o; 同法计算2、3、4…各点及QZ点的极坐标θ、d,其结果列于表11-10中。 4、极坐标法测设曲线测设: 置镜于E点:x E =50.OOOm, y E =86.603m。 测设半个曲线,每1Om一个点。如图11-31 当按θQZ及d QZ测设曲中点时,应与主点测设时的曲中点位置进行校核。 以上是测设半个曲线的测设情况,即以ZH点为坐标原点测设至QZ。