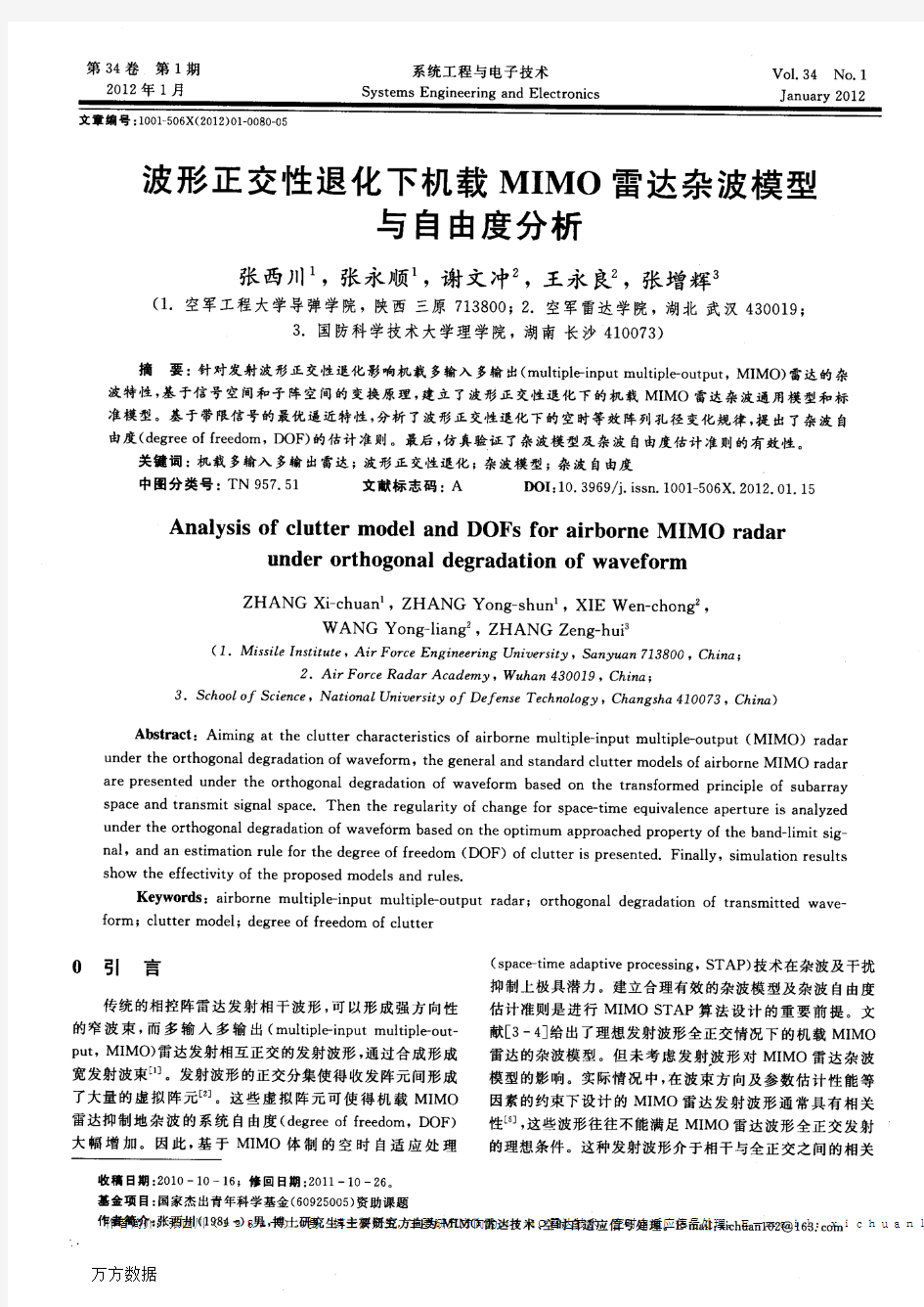
波形正交性退化下机载MIMO雷达杂波模型与自由度分析
波形正交性退化下机载MIMO雷达杂波模型与自由度分析
作者:张西川, 张永顺, 谢文冲, 王永良, 张增辉, ZHANG Xi-chuan, ZHANG Yong-shun, XIE Wen-chong, WANG Yong-liang, ZHANG Zeng-hui
作者单位:张西川,张永顺,ZHANG Xi-chuan,ZHANG Yong-shun(空军工程大学导弹学院,陕西三原,713800), 谢文冲,王永良,XIE Wen-chong,WANG Yong-liang(空军雷达学院,湖北武汉,430019), 张增辉,ZHANG
Zeng-hui(国防科学技术大学理学院,湖南长沙,410073)
刊名:
系统工程与电子技术
英文刊名:Systems Engineering and Electronics
年,卷(期):2012,34(1)
本文链接:https://www.360docs.net/doc/ec12823185.html,/Periodical_xtgcydzjs201201015.aspx
雷达系统中杂波信号的建模与仿真
1.雷达系统中杂波信号的建模与仿真目的 雷达的基本工作原理是利用目标对雷达波的散射特性探测和识别目标。然而目标存在于周围的自然环境中,环境对雷达电磁波也会产生散射,从而对目标信号的检测产生干扰,这些干扰就称为雷达杂波。对雷达杂波的研究并通过相应的信号处理技术可以最大限度的压制杂波干扰,发挥雷达的工作性能。 雷达研制阶段的外场测试不仅耗费大量的人力、物力和财力,而且容易受大气状况影响,延长了研制周期。随着现代数字电子技术和仿真技术的发展,计算机仿真技术被广泛应用于包括雷达系统设计在内的科研生产的各个领域,在一定程度上可以替代外场测试,降低雷达研制的成本和周期。 长期以来,由于对杂波建模与仿真的应用己发展了多种杂波类型和多种建模与仿真方法。然而却缺少一个集合了各种典型杂波产生的成熟的软件包,雷达系统的研究人员在需要用到某一种杂波时,不得不亲自动手,从建立模型到计算机仿真,重复劳动,造成了大量的时间和人力的浪费。因此,建立一个雷达杂波库,就可以使得科研人员在用到杂波时无需重新编制程序,而直接从库中调用杂波生成模块,用来产生杂波数据或是用来构成雷达系统仿真模型,在节省时间和提高仿真效率上的效益是十分可观的。 从七十年代至今已经公布了很多杂波模型,其中有几类是公认的比较合适的模型。而且,杂波建模与仿真技术的发展己有三十多年的历史,己经有了一些比较成熟的理论和行之有效的方法,这就使得建立雷达杂波库具有可行性。 为了能够反映雷达信号处理机的真实性能,同时为改进信号处理方案提供理论依据,雷达杂波仿真模块输出的杂波模拟信号应该能够逼真的反映对象环境的散射环境。模拟杂波的一些重要散射特性影响着雷达对目标的检测和踉踪性能,比如模拟杂波的功率谱特性与雷达的动目标显示滤波器性能有关;模拟杂波的幅度起伏特性与雷达的恒虚警率检测处理性能有关。因此,杂波模拟方案的设计是雷达仿真设计中极其重要的内容,杂波模型的精确性、通用性和灵活性是衡量杂波产生模块的重要指标。 2.Simulink简介 Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和
机载雷达地杂波信号仿真
机载雷达的地杂波仿真实现 前言 机载雷达由于架设在运动的高空平台上,具有探测距离远、覆盖范围大、机动灵活等特点,应用范围相当广泛,可以执行战场侦察、预警等任务。在海湾战争、伊拉克战争中起到关键作用,在现代战争中越来越不可缺少,因此近年来受到广泛重视。但由于机载雷达的应用面临非常复杂的杂波环境,杂波功率很强,载机的平台运动效应使杂波谱展宽。此外,飞机运动时,杂波背景的特性会随时间变化。因此,有效地抑制这种时间非平稳和空间非平均的杂波干扰时雷达系统有效完成地面目标和低空飞行目标检测必须解决的首要问题。 从理想雷达系统设计过程中知道,雷达设计的目的提出之后,首先要考虑的是环境的影响,地海杂波环境对雷达性能的发挥是一个严重的负担,尤其是机载下视雷达,会遇到更加恶劣的杂波环境,能否正确估计杂波对雷达性能的影响,是雷达系统成败的关键之一。 。机载雷达遇到的地面杂波不仅强度大,多普勒频谱宽,而且可能在所有的距离上成为目标检测的背景;另一方面,雷达机载飞行地域广、地形地貌多种多样,仅使用一些简单的、典型的杂波数据已不能满足需要。因此,只有弄清楚地面/海面杂波的特性,才能够正确地确定机载雷达方案,选择主要的技术参数。例如: 1.只有根据各种地形和海面杂波的主要特征参数,并经过严格的杂波计算,才能得到比较准确的杂波强度和频谱数据,从而在这个基础上确定雷达的技术方案,对信号质量、系统动态范围、天线副瓣电平等指标提出要求。 2.只有弄清楚杂波的分布特性及参数,才能恰当的设计杂波抑制器的频率响应特性和恒虚警处理器,更加有效地消除主瓣杂波,并在一定的副杂波背景中检测目标。 3.雷达信号模拟器是调整和检验机载雷达性能的必要手段,但只有在弄清楚杂波的特性参数以后,才能够对信号及杂波模拟器提出合理的、准确的要求。 目前使用杂波模型主要有三种方式:描述杂波幅度和功率谱的统计模型,描述杂波 与频率、极化、俯角、环境参数等物散射单元机理的机理模型,描述由试验数据拟和0 理量之间依赖关系的关系模型。 1.描述杂波散射单元机理的机理模型 杂波机理模型的研究是属于杂波雷达截面的理论分析范畴,即根据各种电磁散射理论研究杂波单元产生散射场的各种机理,并利用各种计算方法和计算机技术定量预估各种情况下杂波单元的雷达散射截面特征。散射过程的讨论必须同特定的结构单元结合起来,这是机理模型分析的基本点。在散射单元的物理结构方面,对于现有的一些比较成功的地杂波和海杂波模型(如组合表面模型)一般都只是对于特定的地貌、海情,或者
雷达系统建模与仿真报告模板.doc
设计报告一十种随机数的产生 一概述 . 概论论是在已知随机变量的情况下,研究随机变量的统计特性及其参量,而随机变量的仿真正好与此相反,是在已知随机变量的统计特性及其参数的情况下研究如何在计算机上产生服从给定统计特性和参数随机变量。 下面对雷达中常用的模型进行建模: 均匀分布 高斯分布 指数分布 广义指数分布 瑞利分布 广义瑞利分布 Swerling 分布 t分布 对数一正态分布 韦布尔分布 二随机分布模型的产生思想及建立 . 产生随机数最常用的是在(0,1) 区间内均匀分布的随机数,其他分布的随机数可利用均匀分布随机数来产生。 均匀分布 1>( 0, 1)区间的均匀分布: 用混合同余法产生(0,1)之间均匀分布的随机数,伪随机数通常是利用递推公式产生的,所用的混和同余法的递推公式为: x n 1 = x n +C(Mod m)
其中,C是非负整数。通过适当选取参数 C可以改善随机数的统计性质。一般取作小于 M的任意奇数正整数,最好使其与模 M互素。其他参数的选择 (1)的选取与计算机的字长有关。 (2) x(1) 一般取为奇数。 用Matlab 来实现,编程语言用 Matlab 语言,可以用 hist 数的直方图(即统计理论概率分布的一个样本的概率密度函数) 函数画出产生随机,直观地看出产 生随机数的有效程度。其产生程序如下: c=3;lamade=4*200+1; x(1)=11; M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M); end; x=x./M; hist(x,10); mean(x) var(x) 运行结果如下: 均值 =方差= 2> (a,b )区间的均匀分布: 利用已产生的( 0,1)均匀分布随机数的基础上采用变换法直接产生(a,b)均匀分布的随机数。 其概率密度函数如下: 1 p( x) b a a x b 0 x a, x b 其产生程序如下: c=3;lamade=4*201+1; a=6;b=10; x(1)=11;M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M);
SIRP法K分布雷达杂波的建模与仿真
SIRP 法K 分布雷达杂波的建模与仿真 etpolo@https://www.360docs.net/doc/ec12823185.html, (本文是在论坛已有一篇文章《SIRP 法相干相关K 分布雷达杂波的建模与仿真》的基础上修改而来,在此首先感谢这篇文章的作者给予我的帮助。之所以完成这篇文章,有三个方面的原因:一是对原文章和仿真程序代码明显存在一些不一致的地方,因此,我这里对每个公式进行检验(后来证明文章的公式正确无误,但所给的仿真代码存在问题),二是对自己近4天工作的一个总结,以便以后学习可以参考;三是可以放在网上给初学者一些参考,以便后来者不再走自己曾经走过的弯路。文章的一些文字是在匆忙间完成,只求能表达所述意思,没有详细斟酌,海涵:)) 所谓杂波仿真,实际上就是要生成一系列在幅度上服从特定的概率密度分布(pdf )的相关随机序列,常见的杂波仿真方法有两种:零记忆非线性变换法(ZMNL )和 球不变随机过程法(SIRP )。ZMNL 方法的基本思想是:首先产生相关的高斯随机过程,然后经过某种非线性变换得到所求的相关随机序列。这种方法的缺点就是输入序列与输出序列间有复杂的非线性关系,因此必须寻找输入序列与输出序列的相关函数间的非线性对应关系。SIRP 方法的基本思想是:产生一个相关的高斯随机过程,然后用具有所要求的单点概率密度函数的随机序列进行调制。这种方法的缺点则是受所求的序列的阶数及自相关函数的限制,同时这种方法的计算量非常大,不易形成快速算法。 ISAR 是一种相干雷达,其海杂波必然是相干且时空相关的。对于相干相关杂波,以往的方法都是将非相干的ZMNL 方法加以推广得到相干的ZMNL 模型。这种方法得以应用的一个前提是已知非线性变换前后杂波相关系数的非线性关系,然而对于相干相关K 分布杂波却很难找到这样一种非线性变换,于是我们采取SIRP 方法来仿真ISAR 的海杂波。 K 分布适用于描述高分辨雷达的非均匀杂波,多用于对海杂波的模拟。K 分布可以由一个均值是慢变化的瑞利分布来表示,其中这个慢变化的均值服从Γ分布。K 分布的概率密度函数为: ()()()12;,K /,(0,0)2x f x x x ννανανανα-??=??>> ?Γ?? (1) (公式1经过了本文查阅相关文献进行了确认) 其中,ν是形状参数,α是尺度函数,()Γ是伽马函数,K ν是第二类修正贝赛尔函数。杂波平均功率2σ,ν和α之间的关系可表示为: 2 22σαν= (2) (公式2经过本人查阅文献进行了确认) 对于大多数杂波来说,形状参数的取值范围是0ν<<∞,对于较小的ν的取值,如0.1ν→时,杂波有较长的托尾,ν→∞时的分布接近于瑞利分布。图1给出了K 分布杂波序列的实现结构。
SIRP法相干相关K分布雷达杂波的建模与仿真
SIRP 法相干相关K 分布雷达杂波的建模与仿真 gjj_hit@https://www.360docs.net/doc/ec12823185.html, 所谓杂波仿真,实际上就是要生成一系列在幅度上服从特定的概率密度分布(pdf )的相关随机序列,常见的杂波仿真方法有两种:零记忆非线性变换法(ZMNL )和 球不变随机过程法(SIRP )。ZMNL 方法的基本思想是:首先产生相关的高斯随机过程,然后经过某种非线性变换得到所求的相关随机序列。这种方法的缺点就是输入序列与输出序列间有复杂的非线性关系,因此必须寻找输入序列与输出序列的相关函数间的非线性对应关系。SIRP 方法的基本思想是:产生一个相关的高斯随机过程,然后用具有所要求的单点概率密度函数的随机序列进行调制。这种方法的缺点则是受所求的序列的阶数及自相关函数的限制,同时这种方法的计算量非常大,不易形成快速算法。 ISAR 是一种相干雷达,其海杂波必然是相干且时空相关的。对于相干相关杂波,以往的方法都是将非相干的ZMNL 方法加以推广得到相干的ZMNL 模型。这种方法得以应用的一个前提是已知非线性变换前后杂波相关系数的非线性关系,然而对于相干相关K 分布杂波却很难找到这样一种非线性变换,于是我们采取SIRP 方法来仿真ISAR 的海杂波。 K 分布适用于描述高分辨雷达的非均匀杂波,多用于对海杂波的模拟。K 分布可以由一个均值是慢变化的瑞利分布来表示,其中这个慢变化的均值服从Γ分布。K 分布的概率密度函数为: ()()()12;,K /, (0,0)2x f x x x ν νανανανα-?? =??>> ?Γ?? (1) 其中,ν是形状参数,α是尺度函数,()Γ 是伽马函数,K ν是第二类修正贝赛尔函数。杂波平均功率2σ,ν和α之间的关系可表示为: 2 2 2σαν = (2) 对于大多数杂波来说,形状参数的取值范围是0ν<<∞,对于较小的ν的取值,如0.1ν→时,杂波有较长的托尾,ν→∞时的分布接近于瑞利分布。图1给出了K 分布杂波序列的实现结构。 图1 相干相关K 分布杂波SIRP 方法 图中,1()w k 为一复高斯白噪声,线性滤波器1()H z 由()x k 的相关函数设计决定,2()w k 为一与1()w k 相互独立的实高斯噪声,线性滤波器2()H z 必须使得输出的高斯序列具有高度的相关性(相关函数接近于1),ZMNL 变换使得输出的
基于Simulink的脉冲多普勒雷达系统建模仿真
基于Simulink的脉冲多普勒雷达系统建模仿真 胡海莽1,杨万海 (西安电子科技大学电子工程学院,陕西 西安 710071) 摘要:利用计算机仿真技术的可控制性,可重复性,无破坏性,安全性,经济性等特点与优势对雷达电子对抗装备及其技术与战术运用等进行仿真与效能评估,是当前和未来雷达与电子对抗领域研究中的一种重要手段。本文的工作是建立一个基于Simulink的雷达系统仿真库,因为MATLAB的使用广泛性,因此基于其上的雷达系统仿真库较易推广。该雷达系统仿真库不仅可以协助设计雷达系统而且可以帮助学生学习雷达系统。 关键词:雷达;建模;仿真 Modeling and Simulation of PD Radar System Based on Simulink HU Hai-Mang, YANG Wan-Hai (Xidian Univ, Xi’an 710071, China) Abstract: The modeling and simulation of radar systems with system simulation tools make it possible to complete scheme reasoning and performance evaluation efficiently. This paper constructs some radar function blocks and models and simulates a pulse Doppler radar system based on Simulink5.0.The software is perfectly applied in the study of algorithms in radar signal processing and displays the system’s performance. Keywords: radar; modeling; simulation; Simulink; 1 引言 在雷达信号处理系统中系统级仿真占有极其重要的地位,经过系统级仿真能够保证产品在最高层次上的设计正确性。因为外场模拟真实战场复杂电磁环境是非常困难的,同时也耗资巨大。外场试验的次数有限,难以全面反映雷达系统在各种复杂环境下的性能,外场测试和设计修改使得试验周期长,并造成巨大浪费。 以往的工作多是基于EDA平台如SPW和SystemView,这些软件专业性很强,而且价格较贵,因此基于这些平台的雷达系统仿真库也较难推广。本文的工作是建立一个基于Simulink的雷达系统仿真库,因为MATLAB的广泛性使用,因此基于其上的雷达系统仿真库较易推广。该雷达系统仿真库不仅可以协助设计雷达系统而且可以帮助学生学习雷达系统。 Simulink是一种开放性的,用来模拟线性或非线性的以及连续或离散的或者两者混合的动态系统的强有力的系统级仿真工具。它是MATLAB的一个附加组件,用来提供一个系统级的建模与动态仿真工作平台。Simulink是用模块组合的方法来使用户能够快速、准确地创建动态系统的计算机模型的。另外,Simulink还提供一套图形动画的处理方法,使用户可以方便地观察到仿真的整个过程。 Simulink5.0在软硬件的接口方面有了长足的进步,Simulink已经可以很方便地进行实时的信号控制和处理、信息通信以及DSP的处理。仿真程序经过编译可以直接下载到DSP等硬件设备中去,使得从系统级仿真到硬件实现可以一气呵成。 本文的仿真基于MATLAB6.5及其所带的Simulink5.0。 2 脉冲多普勒雷达系统仿真 脉冲多普勒(PD)雷达是在动目标显示雷达基础上发展起来的一种新型雷达体制。这种雷达具 作者简介:胡海莽(1977-),男,江苏省淮安市人,现为西安电子科技大学电路与系统学科硕士研究生,研究方向为信息处理,系统仿真。
模型预测控制
云南大学信息学院学生实验报告 课程名称:现代控制理论 实验题目:预测控制 小组成员:李博(12018000748) 金蒋彪(12018000747) 专业:2018级检测技术与自动化专业
1、实验目的 (3) 2、实验原理 (3) 2.1、预测控制特点 (3) 2.2、预测控制模型 (4) 2.3、在线滚动优化 (5) 2.4、反馈校正 (5) 2.5、预测控制分类 (6) 2.6、动态矩阵控制 (7) 3、MATLAB仿真实现 (9) 3.1、对比预测控制与PID控制效果 (9) 3.2、P的变化对控制效果的影响 (12) 3.3、M的变化对控制效果的影响 (13) 3.4、模型失配与未失配时的控制效果对比 (14) 4、总结 (15) 5、附录 (16) 5.1、预测控制与PID控制对比仿真代码 (16) 5.1.1、预测控制代码 (16) 5.1.2、PID控制代码 (17) 5.2、不同P值对比控制效果代码 (19) 5.3、不同M值对比控制效果代码 (20) 5.4、模型失配与未失配对比代码 (20)
1、实验目的 (1)、通过对预测控制原理的学习,掌握预测控制的知识点。 (2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已 知的控制模型,通过对参数的选择,来获得较好的控制效果。 (3)、了解matlab编程。 2、实验原理 模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。传统PID控制,是根据过程当前的和过去的输出测量值与设定值之间的偏差来确定当前的控制输入,以达到所要求的性能指标。而预测控制不但利用当前时刻的和过去时刻的偏差值,而且还利用预测模型来预估过程未来的偏差值,以滚动优化确定当前的最优输入策略。因此,从基本思想看,预测控制优于PID控制。 2.1、预测控制特点 首先,对于复杂的工业对象。由于辨识其最小化模型要花费很大的代价,往往给基于传递函数或状态方程的控制算法带来困难,多变量高维度复杂系统难以建立精确的数学模型工业过程的结构、参数以及环境具有不确定性、时变性、非线性、强耦合,最优控制难以实现。而预测控制所需要的模型只强调其预测功能,不苛求其结构形式,从而为系统建模带来了方便。在许多场合下,只需测定对象的阶跃或脉冲响应,便可直接得到预测模型,而不必进一步导出其传递函数或状
MATLAB模型预测控制工具箱函数
M A T L A B模型预测控制 工具箱函数 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
M A T L A B模型预测控制工具箱函数 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
PRC_CW雷达地杂波分布特性模型分析
收稿日期:1997-11-06. 曹治国,男,1964年生,讲师;武汉,华中理工大学图像识别与人工智能研究所(430074). *航天工业总公司九五预研项目(46.2.3/A 960804-02)). PRC -CW 雷达地杂波分布特性模型分析* 曹治国 张志勇 张天序 华中理工大学图像识别与人工智能研究所图像信息处理与智能控制国家教委开放实验室 摘 要 针对伪码调相连续波(P RC -CW)雷达的特殊性,指出在低俯视角情形时雷达回波信号存在展宽现象,提出了对码元回波幅度进行空间矢量叠加以得到P RC -CW 雷达回波信号的方法.通过理论分析,指出PR C -CW 雷达的概率密度分布趋近于瑞利分布,并用计算机模拟的方法进行了验证.关键词 伪码调相;连续波雷达;W eibull 分布;瑞利分布分类号 T N 95 伪码调相连续波雷达在目标检测、跟踪、制导等方面有着广阔的应用前景[1] .为了在设计和使用伪码调相连续波雷达时,最大限度地发挥其效能,必须针对其特殊性来研究目标特性和环境特性,而目前这方面的研究国内外尚未见公开报道,因此,本文针对X 波段双相伪码调制连续波相控阵雷达的特点,研究目标环境中地杂波的分布特性. 1 伪码调相连续波体制下雷达地杂 波特性研究 伪码调相连续波雷达的发射波形是一种连续波形[2] ,码元宽度为S 0,相当于100%占空比的脉 冲,见图1.令S e 为一个码元回波的长度,则S e ≈2R H 信息与通信工程学院 综合实验(1)设计报告海杂波的建模与仿真 学号:S310080092 专业:通信与信息系统 学生姓名:韩鹏 任课教师:穆琳琳 2011年6月 海杂波的建模与仿真 韩鹏 摘要:海杂波的建模与仿真是雷达目标模拟中环境模拟的重要部分。仿真得到的海杂波数据良好与否是雷达最优化设计及雷达信号处理的关键。海杂波的存在对雷达的目标检测、定位跟踪的性能都将产生影响,因此,在海杂波为主要干扰源的情况下,有必要对雷达探测区域内的海杂波特性进行分析,本文给出了海杂波的一些相关特性和几种分布下海杂波的模型以及两种海杂波的模拟方法,一种是无记忆非线性变换法(Zero Memory Nonlinearity,ZMNL),另一种是球形不变随机过程法(Spherically Invariant Random Process,SIRP),最后给出ZMNL模拟方法的仿真。 关键词:海杂波随机过程建模与仿真ZMNL SIRP 一、实验目的 海面上反射回来的不需要的杂波称为海杂波。海杂波的存在对雷达的目标检测、定位跟踪的性能都将产生影响,因此,在海杂波为主要干扰源的情况下,有必要对雷达探测区域内的海杂波特性进行分析,建立准确的海杂波模型,一方面可以为雷达系统仿真提供逼真的杂波环境的模型;另一方面则有助于雷达杂波滤波器的设计和实现,提高抑制杂波的能力,提高雷达的探测性能。因此,海杂波的建模与仿真具有重要意义。 二、实验内容简介 2.1海杂波的概念和统计性质 2.1.1海杂波的概念 大家都知道,雷达系统的主要功能是目标检测,即发现目标。还可以在一个或者多个雷达坐标上,粗略的确定目标的位置。雷达可以对目标进行重复测量的方法,沿目标轨道对目标进行跟踪,可以外推到未来位置,估计拦截点或落点,也可以向后外推,估计发射点。 但是当雷达探测位于陆地或海面上的目标时,雷达接受的不仅有目标的回波,而且叠加有不需要的被照射区域的回波,这部分回波在雷达术语里就被称为杂波。雷达杂波就是雷达波束在物体表面形成的后向散射,海杂波就是海面上反射回来的杂波,它表现出更强的动态特性。海面作为雷达波的反射面,其性能十分复杂,海风、海流、海浪、潮汐和不同的水质等都对海杂波的产生有着不同的影响。 2.1.2海杂波的统计性质 雷达接受信号一般包括下面三个组成部分:1)有用的雷达目标回波;2)由于电干扰和雷达设备本身等形成的噪声;3)地面、海面及空中的云雨、干扰箔条等背景形成的杂波。由于杂波信号的强度远远超过目标信号,并且杂波谱常常接近于目标,同时还受雷达设备参数的影响,这些因素增大了雷达对杂波的处理难度。 模型预测控制快速求解算法 模型预测控制(Model Predictive Control,MPC)是一种基于在线计算的控制优化算法,能够统一处理带约束的多参数优化控制问题。当被控对象结构和环境相对复杂时,模型预测控制需选择较大的预测时域和控制时域,因此大大增加了在线求解的计算时间,同时降低了控制效果。从现有的算法来看,模型预测控制通常只适用于采样时间较大、动态过程变化较慢的系统中。因此,研究快速模型预测控制算法具有一定的理论意义和应用价值。 虽然MPC方法为适应当今复杂的工业环境已经发展出各种智能预测控制方法,在工业领域中也得到了一定应用,但是算法的理论分析和实际应用之间仍然存在着一定差距,尤其在多输入多输出系统、非线性特性及参数时变的系统和结果不确定的系统中。预测控制方法发展至今,仍然存在一些问题,具体如下: ①模型难以建立。模型是预测控制方法的基础,因此建立的模型越精确,预测控制效果越好。尽管模型辨识技术已经在预测控制方法的建模过程中得以应用,但是仍无法建立非常精确的系统模型。 ②在线计算过程不够优化。预测控制方法的一大特征是在线优化,即根据系统当前状态、性能指标和约束条件进行在线计算得到当前状态的控制律。在在线优化过程中,当前的优化算法主要有线性规划、二次规划和非线性规划等。在线性系统中,预测控制的在线计算过程大多数采用二次规划方法进行求解,但若被控对象的输入输出个数较多或预测时域较大时,该优化方法的在线计算效率也会无法满足系统快速性需求。而在非线性系统中,在线优化过程通常采用序列二次优化算法,但该方法的在线计算成本相对较高且不能完全保证系统稳定,因此也需要不断改进。 ③误差问题。由于系统建模往往不够精确,且被控系统中往往存在各种干扰,预测控制方法的预测值和实际值之间一定会产生误差。虽然建模误差可以通过补偿进行校正,干扰误差可以通过反馈进行校正,但是当系统更复杂时,上述两种校正结合起来也无法将误差控制在一定范围内。 模型预测控制区别于其它算法的最大特征是处理多变量多约束线性系统的能力,但随着被控对象的输入输出个数的增多,预测控制方法为保证控制输出的精确性,往往会选取较大的预测步长和控制步长,但这样会大大增加在线优化过程的计算量,从而需要更多的计算时间。因此,预测控制方法只能适用于采样周 MATLAB模型预测控制工具箱函数 8.2 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 8.2.1 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤ MPC 传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB 通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC 状态空间模型和MPC 传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC 状态空间模型之间的转换 MPC 状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod ()和mod2ss ()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC 状态空间模型函数ss2mod () 该函数的调用格式为 pmod= ss2mod (A,B,C,D) pmod = ss2mod (A,B,C,D,minfo) pmod = ss2mod (A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D 为通用状态空间矩阵; minfo 为构成MPC 状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆ minfo(1)=dt ,系统采样周期,默认值为1; ◆ minfo(2)=n ,系统阶次,默认值为系统矩阵A 的阶次; ◆ minfo(3)=nu ,受控输入的个数,默认值为系统输入的维数; ◆ minfo(4)=nd ,测量扰的数目,默认值为0; ◆ minfo(5)=nw ,未测量扰动的数目,默认值为0; ◆ minfo(6)=nym ,测量输出的数目,默认值系统输出的维数; ◆ minfo(7)=nyu ,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o ,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod 为系统的MPC 状态空间模型格式。 例8-5 将如下以传递函数表示的系统模型转换为MPC 状态空间模型。 1 2213)(232+++++=s s s s s s G 解:MATLAB 命令如下: 神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制海杂波的建模与仿真
模型预测控制快速求解算法
MATLAB模型预测控制工具箱函数
神经网络模型预测控制器