波浪中多船近距离并行航行的水动力干扰研究_许勇_董文才
文章编号:1000?0887(2014)04?0389?12
?应用数学和力学编委会,ISSN1000?0887波浪中多船近距离并行航行的水动力干扰研究?
许一勇,一董文才
(海军工程大学舰船工程系,武汉430033)
摘要:一采用三维势流理论及多体动力学理论建立了波浪中近距离并行航行多船波浪作用力及运动响应的计算模型.为考虑航速效应对船体间自由面的影响,采用三维移动脉动源Green(格林)函数来模拟船间的辐射波及绕射波.采用该数学模型求解了零航速及有航速情形下两船近距离并行时的流体动力项及运动响应,和模型试验结果比较验证了方法的可靠性.将该方法推广至三船并行航行的情形,重点分析了三船并行时水动力干扰和两船并行时水动力干扰的差异.
关一键一词:一水动力干扰;一多船;一波浪作用力;一运动响应;一移动脉动源
中图分类号:一U661.32;O352一一一文献标志码:一A
doi:10.3879/j.issn.1000?0887.2014.04.005
引一一言
波浪中近距离航行两船或多船水动力干扰的理论研究一直是船舶流体力学中的一个经典而又重要的研究课题.其中确定波浪中航行补给时舰船的波浪力及运动响应就是一个典型的案例.航行补给时两船(或多船)在有限间距范围内同速二同向航行,在静水中两船内侧的流场发生干扰,会产生相互作用力,可能使船体产生横向运动而危及船体的安全航行;在波浪中船体会产生摇荡运动并传播辐射波,入射波在遭遇船舶时产生绕射波,各船的辐射波及绕射波传递到毗邻船体并产生新的激励作用,这种新的激励必然影响船体的摇荡运动,同时还会形成新的绕射,从而形成船体间的波浪干扰,因此求解有航速船体的辐射?绕射波是研究并行航行的多船间水动力干扰的关键,本文重点讨论船体间的这种波浪干扰.这种干扰可能加剧各船的波浪载荷和运动响应,导致补给困难或补给失败,而且还可能使船体发生碰撞,产生不必要的事故和人员伤亡.随着我海军舰艇编队远洋航行和护航任务的增加,航行补给时间的增长二补给舰和被补给舰种类的增多,航行补给所涉及的水动力干扰问题更为复杂.为提高补给效率,航行补给将不仅仅只在两舰之间开展,还会出现多舰补给的工况.因此开展波浪中多船水动力干扰的理论研究,不仅具有理论研究价值,而且具有现实意义.
求解波浪中近距离船体间水动力干扰的理论方法主要包括切片法[1?2]二势流和粘性流相结合的混合方法[3?4]二三维势流方法[5?10]及三维势流时域法[11?12].切片法无法考虑流体对船体的9
83一应用数学和力学,第35卷第4期一2014年4月15日出版一一一一一一一一一一一一一一一AppliedMathematicsandMechanics一一一Vol.35,No.4,Apr.15,2014?收稿日期:一2013?10?08;修订日期:一2014?03?13基金项目:一国家自然科学基金(50879090);水动力重点基金(9140A14030712JB11044)
作者简介:一许勇(1981 ),男,湖南岳阳人,博士生(通讯作者.E?mail:nancy23670@163.com);
董文才(1967 ),男,武汉人,教授,博士生导师(E?mail:haigongdwc@163.com).
网络出版时间:2014-04-04 15:57网络出版地址:https://www.360docs.net/doc/e314834025.html,/kcms/doi/10.3879/j.issn.10000887.2014.04.005.html
三维动力效应,限制了其预报精度;势流及粘性流相结合的方法目前还处于二维阶段,仍无法
应用于多个复杂船体水动力干扰问题;三维势流方法则多采用脉动源Green函数法,当有航速
时其预报的辐射波及绕射波为环形波,难以正确反映船体间真实的波浪干扰,常在船体共振频
率处出现数值共振现象[10];文献[10]将三维移动脉动源Green函数用于求解有航速时两船的水动力干扰问题,其精度要高于脉动源Green函数预报结果,并消除了在船体共振频率处脉动
源Green函数预报所出现的数值共振.该函数严格满足有航速时的线性自由面条件,可较真实
地模拟船产生的辐射及绕射波,适合求解多个船体间及多体船片体间的波浪干扰[10,13].本文采用三维势流理论,以该函数为基本内核,建立了多船水动力干扰的预报模型,通过模型试验验证了该方法的可靠性,重点分析了三船并行和两船并行时水动力干扰的差异.
1一基本方程
1.1一速度势
设N艘船以相同航速U近距离同向航行在规则波中,为分析船体间的水动力干扰,在各船
船体上建立随船正交坐标系Ol?xlylzl(l=1,2, ,N),其中各坐标系的xOy平面均处于未扰动的自由面上,Oz轴铅直向上并通过各船的重心,Ox轴正方向平行于船体航速方向,Oy轴指向各船的左舷为正.假定各船航行时的静水阻力由各船推进器产生的推力平衡,船体的摇荡运动和操纵运动可以分离,各船通过操舵来保持航向以避免碰撞.假设流体是不可压的理想流体,密度为ρ,整个流域内流动无旋.设水深无限,并忽略流体的表面张力.各船视为刚体,并在各自平衡位置作六自由度的摇荡运动.进一步假定入射波为微幅波,则各船各模态的摇荡运动可视为频率为ωe(船体的遭遇频率)的简谐振动.在流场中引入严格满足Laplace(拉普拉斯)方程的非定常速度势,该速度势包括各船作摇动运动时产生的辐射势,入射波速度势,入射波遭遇各船时产生的绕射势.根据线性势流理论的叠加原理,船l上总的非定常速度势Φl可写成一一Φl=(eNk=1e6j=1?lkjηkj+?7+?0)e-iωet,(1)式中?lkj为船k作j模态单位振幅简谐振动时产生的辐射波在船l上产生的速度势;ηkj为船k作j模态简谐振动的振幅(下标j=1,2, ,6,分别表示纵荡二横荡二垂荡二横摇二纵摇及首摇);?7为耦合的绕射势,既包括入射波遭遇船l时形成的绕射势,还包括其它各船产生的绕射波传播到该船时形成的绕射势;?0为入射波的速度势,其定义式如下:
一一?0(x,y,z)=-igζω
0exp[k0z+ik0(xcosβ+ysinβ)],(2)
其中ω0,k0,β及ζ分别表示入射波的自然频率二波数二入射角及波幅.
1.2一边界条件
速度势?lkj及?7除在流场内需满足Laplace方程,还需严格满足线性自由面条件二流场底部条件和远方的辐射条件[14].此外,?lkj及?7还需在各船的平均船湿表面Sk上满足不可穿透条件.波浪中并行多船的辐射问题比单船要复杂得多,其原因在于各船的简谐振动是各波浪在其船体上综合作用的结果,因此其辐射问题是耦合的.为简化该问题,文献[1]在分析两船情形下的辐射问题时将其简化为两种情况的叠加,即其中一船作简谐振动而另一船受六自由度运动约束及另一船作简谐振动而其中一船受各自由度运动约束.将该方法推广至本文多船的情形,则可将辐射势的物面条件简化为
093许一一勇一一一董一一文一一才
一一
??lkj?nkSk=-iωenkj+mkj,k=l,0,k?l,{(3)
其中(nk1,nk2,nk3)=nk,(nk4,nk5,nk6)=rk?nk,nk为船k船湿表面的单位法线向量,指向流体为正,rk为船k船湿表面场点指向该船重心的方向向量.假设船体细长,忽略定常兴波对扰动势的影
响,式(3)中mkj可简化为:当j=1,2,3,4时mkj=0,mk5=Unk3及mk6=-Unk2.绕射问题比辐射问题简单,可直接耦合求解[2],其物面条件可写成一一??7?nkSk=-??0?nk.(4)
2一数值求解2.1一边界元积分方程
满足上述边界条件的辐射势或绕射势,可用合适的点源形式的Green函数或混合使用点源和点偶形式的Green函数在物面上的分布来表达.本文采用点源形式的Green函数来表达速度势:
一一?(p)=14πeNk=1
??Skσ(q)G(p,q)ds+eNk=1U24πg?Ckσ(q)G(p,q)n1(q)dη,(5)其中?可替换为?lkj或?7,p(x,y,z)为场点,q(ξ,η,ζ)为源点,σ(q)为船湿表面的源强分布密度.G(p,q)为满足线性自由面条件的三维移动脉动源Green函数,其表达式如式(6)所示.
一一G=1r-1r1+e2i,j=1?π0kiexp(kixj)[E1(kixj)+2πiHij](-1)i-1π1-4Srcosθdθ,(6)式中
一一rr1}=(x-ξ)2+(y-η)2+(z?ζ)2,一一ki=1-2Srcosθ+(-1)i1-4Srcosθ2cos2θgU2,一一xj=Z+i[Xcosθ+(-1)j-1Ysinθ],X=(x-ξ),Y=(y-η),Z=(z+ζ).
参数Sr=Uωe/g,为Strouhal(斯特劳哈尔)数,g为重力加速度;E1为指数积分函数,Hij为控制因子,其表达式及物理含义可参见文献[15].将式(5)代入式(3)及式(4)的物面条件,借助数值方法可以求得船湿表面各速度势对应的源强分布密度σ(q),将所求的源强分布密度σ(q)代入式(5)可确定各模态辐射势或绕射势.
2.2一脉动压力及波浪作用力
将船湿表面的各速度势代入线性Bernoulli(伯努利)方程可求得船湿表面上各速度势对应的脉动压力幅值.沿船体平均湿表面对各脉动压力进行积分可求得船体的波浪作用力.设flkRi为第k条船作摇荡运动时产生的辐射波传播到第l条船体上时,在该船i(其中i=1,2, ,6)方向产生的波浪作用力(或力矩),其表达式可写成
一一flkRi=-ρiωe??Sle6j=11+Uiωe??x?è
???÷?lkjηkjnlids.(7)相应地,第l条船在i方向的入射力(或力矩)fl0i及绕射力(或力矩)fl7i可写作
一一fl0i=-ρiωee-iωet??
Sl1+Uiωe??x?è???÷?l0nlids,(8)1
93波浪中多船近距离并行航行的水动力干扰研究
一一fl7i=-ρiωee-iωet
??
Sl1+Uiωe??x?è???÷?l7nlids.(9)2.3一运动方程
各船除受到上述波浪作用力外,还受到惯性力及回复力作用,对各船受力分析,并根据刚体动力学理论可建立各船在频域内的运动方程为一一e6j=1(-Mlij
ω2e+Clij)ηlj=fl0i+fl7i+eNk=1flkRi,(10)
式中Mlij为船l的6?6广义惯量矩阵,Clij为其静水力系数矩阵,这两个系数矩阵的计算可参见文献[16].求解上述线性方程组可以求得各船的运动响应幅值ηlj.3一两船的水动力干扰分析3.1一无航速时两船辐射及绕射问题
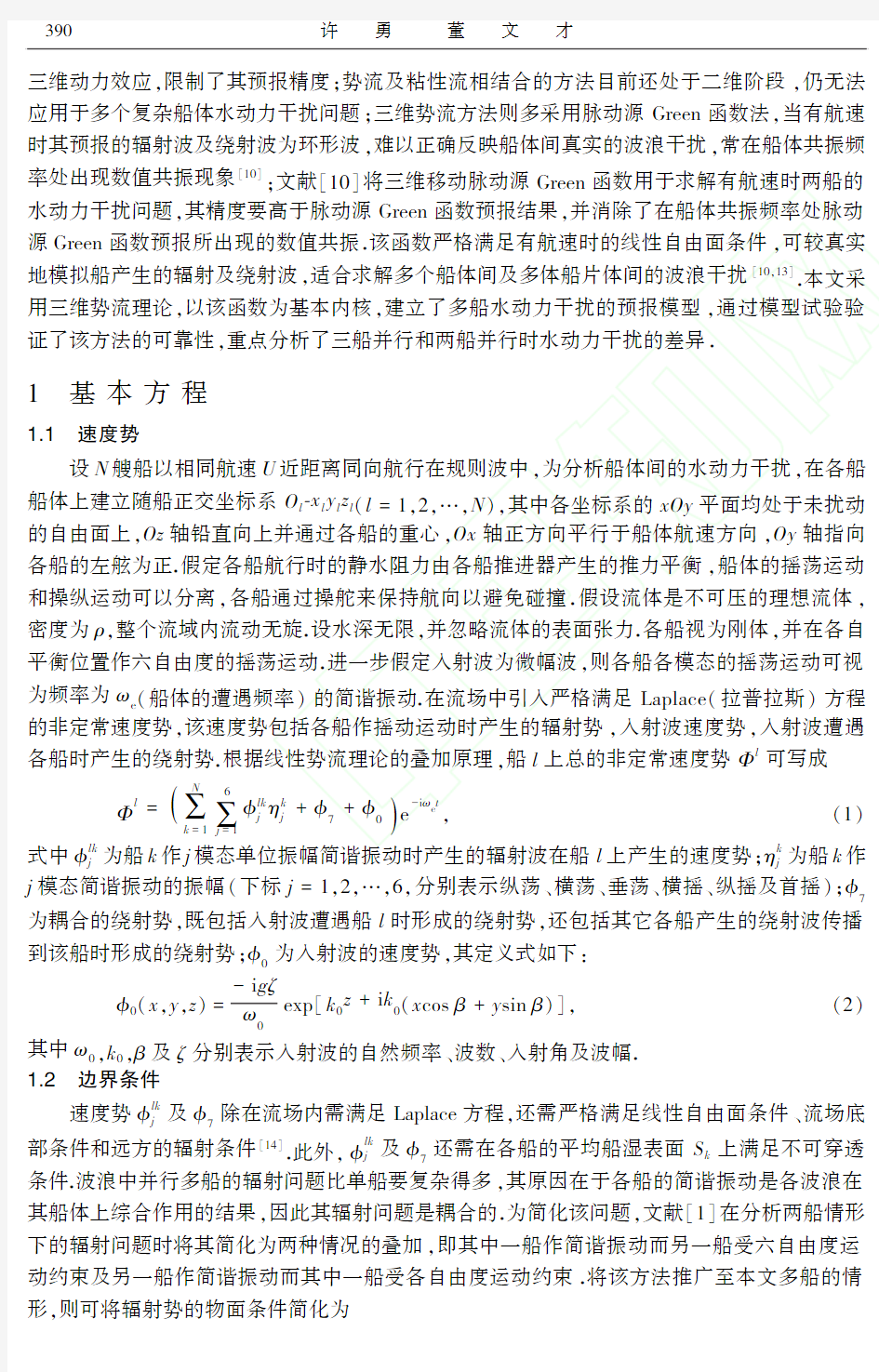
采用该模型对零航速情况下两船的水动力干扰问题进行分析.计算对象为一Wigley船与一Barge船.两船水线长L均为2m,宽B为0.3m,吃水T为0.125m.两船中对中布置,横向间距Dy=0.8985L.两船的几何形状及其它相关参数见文献[17].Wigley船(记为船a)作垂荡运动,Barge船(记为船b)固定.图1及图2分别给出了计算所得的Wigley船无因次垂荡?横荡附加质量及阻尼系数随无因次波数k0L的变化曲线;图3及图4分别为无因次垂荡附加质量及阻尼系数的变化曲线,其中
a为船a的排水体积,Aa23及Ba23表示船a的垂荡?横荡附加质量
及阻尼系数,Aa33及Ba33为该船的垂荡附加质量及阻尼系数.图中还给出了文献[17]的试验结果及文献[12]采用3DRankineSource及时域方法求得的计算结果.两船并行时船体附加质量及阻尼系数的定义式可参见文献[18].由图可见本文计算结果和文献[12]计算结果非常吻合,除低频段外其余频率处的计算结果和试验结果也非常吻合.在低频段存在差异的原因可能是因为模型试验时池壁效应影响所致[17].图1一Wigley船的横荡?垂荡附加质量
图2一Wigley船的横荡?垂荡阻尼系数
Fig.1一Sway?heaveaddedmassoftheWigleyhullFig.2一Sway?heavedampingcoefficientoftheWigleyhull
为验证本文模型求解零速情形下绕射问题的可靠性,仍以上述两模型为计算对象求解正横浪时两船受到的波浪干扰力.其中Wigley船布置在迎风侧,两船横向间距Dy=0.5485L.图5 图8分别给出了两船的无因次横荡力及垂荡力的计算结果及试验结果,图中Awa及Awb为两
船的水线面面积,fwa2,fwa3为船a横荡方向及垂荡方向受到的波浪干扰力,fwb2,fwb3为船b横荡方向及垂荡方向受到的波浪干扰力.从图可见本方法和文献[12]的计算结果及试验结果吻合良好.293许一一勇一一一董一一文一一才
图3一Wigley
船的垂荡附加质量
图4一Wigley船的垂荡阻尼系数
Fig.3一HeaveaddedmassoftheWigleyhullFig.4一HeavedampingcoefficientoftheWigleyhull
图5一Wigley船的无因次横荡力
图6一Wigley船的无因次垂荡力
Fig.5一SwayexcitationforceontheWigleyhullFig.6一HeaveexcitationforceontheWigleyhull
图7一Barge的无因次横荡力
图8一Barge的无因次垂荡力
Fig.7一SwayexcitationforceontheBargeFig.8一HeaveexcitationforceontheBarge
本节的算例表明移动脉动源Green函数亦可处理无航速时两船的水动力干扰问题,即在零速时移动脉动源退化为脉动源,这也表明脉动源Green函数仅是移动脉动源Green函数的一种极限形式.值得关注的是图中所给的水动力系数及波浪干扰力均呈现波动状态,且存在多峰值情况,注意到在求解辐射问题时仅Wigley船作强迫振荡,求解绕射问题时两船均约束,因此这些作用力的峰值是由于船间的流体共振产生的.文献[12]指出这些共振对应的是两船间流体运动的 活塞模式 (pistonmode)及 晃荡模式 (sloshingmode),其中 晃荡模式 包括纵3
93波浪中多船近距离并行航行的水动力干扰研究
向模式及横向模式.图5 图8中分别用垂向的实线,虚线及点划线分别标出了 活塞模式 二纵向 晃荡模式 二横向 晃荡模式 对应的无因次波数.大体上而言这些估算的共振频率基本能够和这些波浪干扰力的峰值频率对应,差别主要在短波中,这表明Wigley船在纵向船型的变
化对短波而言是重要的[12].3.2一有航速时水动力干扰对两船运动响应的影响
文献[18]开展了规则波中两模型并行近距离航行时船模运动响应影响的测量试验,研究了补给间距变化时水动力干扰对模型运动响应的影响.采用本文程序对横向间距变化时两船运动响应进行了计算,以考核程序的普适性.图9给出了两船模的三维轮廓,模型基本参数如表1所示.两模型中对中布置,入射波波长λ范围为2 10m,航速对应的Froude(傅汝德)数Fr=0.171,浪向β=180?,横向间距Dy分别为0.35La,0.395La及0.437La.
表1一模型主要参数及惯量数据
Table1一MainparticularsofthetestedmodelsspecificationshipashipbwaterlinelengthL/m3.6514.352breadthB/m0.4620.524draftT/m0.1560.148displacementvolume/m3
0.1730.226rollradiusofgyrationkxx/m0.1620.183pitchradiusofgyrationkyy/m0.8951.066图9一计算模型的三维轮廓
Fig.9一3?Dprofilesofthetwoshipmodels
图10一横向间距对船a垂荡运动的影响
图11一横向间距对船a横摇运动的影响Fig.10一Heavemotionofship?awithdifferentDyFig.11一Rollmotionofship?awithdifferentDy
一一图10 图15分别给出了横向间距变化时船a及船b的垂荡二横摇及纵摇运动响应随无因
493许一一勇一一一董一一文一一才
次波长(入射波波长与船模水线长的比值)的变化曲线,其中ηa3,ηa4,ηa5为船a的垂荡二横摇及纵摇运动响应,ηb3,ηb4,ηb5为船b的垂荡二横摇及纵摇运动响应.由图可知数值计算结果和试验结果均吻合较好,验证了本文数学模型在求解有航速时两船水动力干扰问题时的可靠性;
另外,
垂荡及横摇运动在共振区及附近区域内受横向间距的影响较大,一方面,共振点对应的运动幅值随横向间距的增大而变小;另一方面横向间距还影响着船体运动的共振频率,随着横向间距的增大,横摇及垂荡的共振频率会变小(共振点向长波方向移动),且这种共振频率变化的现象在两船模中都能观察到,该现象产生的原因也是下一步需要进行更深层次研究的内容.相对纵向运动而言,横摇运动对横向间距的变化更敏感,其原因可能在于船体的横摇惯量相对较小造成的.图12一横向间距对船a纵摇运动的影响
图13一横向间距对船b垂荡运动的影响Fig.12一Pitchmotionofship?awithdifferentDyFig.13一Heavemotionofship?bwithdifferentDy
图14一横向间距对船b横摇运动的影响
图15一横向间距对船b纵摇运动的影响Fig.14一Rollmotionofship?bwithdifferentDyFig.15一Pitchmotionofship?bwithdifferentDy
4一三船水动力干扰分析采用本文方法对三条大小一致的WigleyⅢ模型在规则波中顶浪航行时水动力系数二波浪作用力及运动响应进行了计算.模型长L=3m,水线宽B=0.3m,吃水T=0.1875m.模型的几何形状及其它相关参数见文献[19].计算时航速对应的Froude数Fr=0.2,无因次频率
ω?e(ω?e=ωeL/g)范围为1 8.设这三船分别为船a,船b及船c,三船中对中布置,中间船为船a,船b及船c分别位于船a的左右舷,和船a的横向间距Dy均为0.3L.为便于分析三船的水动力干扰特性,对船a单独航行及船a和船b并行航行时的情形也进行了计算.图16 图21给出5
93波浪中多船近距离并行航行的水动力干扰研究
了有无其它船体干扰时船a作垂荡二纵摇及首摇运动的部分水动力系数,图中还给出了三船并行时仅船b作摇荡运动的计算结果,
其中
为船模排水体积,A33及B33表示垂荡附加质量及阻
尼,A35及B35为垂荡?纵摇附加质量及阻尼,A26及B26为横荡?首摇附加质量及阻尼.从图可见:图16一
垂荡附加质量
图17一垂荡阻尼系数
Fig.16一HeaveaddedmassFig.17一Heavedampingcoefficient
图18一垂荡?纵摇附加质量
图19一垂荡?纵摇阻尼系数
Fig.18一Heave?pitchaddedmassFig.19一Heave?pitchdampingcoefficient
图20一横荡?首摇附加质量
图21一横荡?首摇阻尼系数
Fig.20一Sway?yawaddedmassFig.21一Sway?yawdampingcoefficient
1)当存在干扰时,干扰效应对水动力系数的影响主要在ω?e<5.2的低频区内,当ω?e>5 2时,两船或三船并行时所得的结果和单独航行时的计算结果基本相同,即船体之间无水动
力干扰.这一现象可通过船体间波浪干扰的本质得到解释:当船a作摇荡运动时产生辐射波,传播至其毗邻船体并反射后可能再次传播到船体a上,当这些反射波能作用于船体a时并会693许一一勇一一一董一一文一一才
形成干扰,否者不会产生干扰.当τ>0.272时,船体产生的辐射波会被限制在一个楔形区域内,该区域关于船体的航向对称并向船尾传播,楔形区两边的夹角是参数τ的单值函数,当τ
越大,夹角越小[20].当ω?e=5.2时τ=1.04,对应于船a产生的辐射波经船b或船c反射后刚好能作用于船a上,当ω?e>
5.2时,由于辐射波楔形区域的夹角变小,辐射波反射后无法作用于
船体a上,因此水动力干扰作用消失.这和零速时水动力干扰的情形不同,3.1小节的算例表明水动力干扰在整个计算频率范围都存在,这是因为零速时船体产生的辐射或绕射波均为环形波,船体的运动频率仅影响辐射波或绕射波的波长,因此船体的运动频率即使增大,这种环形波总能经毗邻船体的反射后作用于自身,所以干扰始终存在.2)有干扰时,水动力系数呈现多峰值情况,这和零速时的情形类似,这些峰值表明了船体
间的流体也产生了共振,即3.1小节所述船体间流体共振模态在有航速时也存在;另外,三船并行时船a水动力系数的峰值明显大于两船并行时的情形.
3)当三船并行时,干扰效应对船a的影响要大于船b的影响.对船b而言,由于船c位于船a的右舷,船b产生的辐射波会由于船a的遮蔽而无法顺利到达船体c并再次反射至船体b上,因此船a的存在遮蔽了船c对船b的干扰.对船a而言,船体b及船体c分别位于其两舷,
其产生的辐射波传播至船b及船c后可顺利的反射至船a上,所以干扰对船a影响更大.图22一绕射波垂向作用力
图23一绕射波纵摇作用力矩Fig.22一HeaveforceproducedbytheFig.23一Pitchmomentproducedbythediffractionwavesdiffractionwaves
图24一垂荡运动响应
图25一纵摇运动响应
Fig.24一HeavemotionresponsesFig.25一Pitchmotionresponses
图22及图23分别给出了绕射波在船体上垂向作用力(fd3)及纵摇力矩(fd5)的计算结
果,图中C33及C55为船体的静水力系数.图24及25给出了船体的垂荡(η3)及纵摇(η5)的运7
93波浪中多船近距离并行航行的水动力干扰研究
893许一一勇一一一董一一文一一才
动响应.从图可见:
1)和辐射问题相似,绕射问题的干扰效应主要在低频区,且干扰效应的强度在低频时要更明显;但和辐射问题不同的是绕射力或力矩受干扰对应的频率范围要大于辐射情况,其原因在于在处理绕射问题时是全耦合求解的,这和辐射问题有差异.从波浪传播的角度来看,当两船或三船并行时,除自身的绕射波经相邻船反射再次形成激励作用外,其它船体产生的绕射波传播到该船体时同样会产生激励作用并形成干扰,相对反射波而言,其它船体产生的绕射波会更易对其产生干扰效应.另外,三船并行时船a绕射力或力矩受水动力干扰的强度要大于船b的情形,其原因也在于船a的遮蔽作用.
2)干扰效应对运动响应的影响主要出现在船体运动的共振区及附近区域(如3<ω?e<5的频率范围内).尽管在低频区水动力系数及绕射力受到的干扰效应明显,船体间流体发生了剧烈的共振,但对运动响应的影响甚微,其原因在于在低频区船体的运动频率远离船体的固有共振频率而导致的.在图中仍可观察到三船并行时水动力干扰对船a的影响最大,如垂荡响应峰值约为单船航行时的3倍,约为两船航行时的1.5倍.
5一结论及建议
以势流理论及多体运动理论为基础,建立了求解波浪中多船近距离并行航行时水动力干扰的数值计算模型.针对波浪中无航速及有航速时两船的水动力项及运动响应进行了计算,和模型试验结果比较验证了数学模型的可靠性,将其推广至三船的情形,分析了水动力干扰对船体所受波浪力及运动响应的影响.主要结论及建议如下:
1)无论是两船还是三船的情形,船体水动力干扰效应是明显的,在特定频率处船体间的流体会产生共振,并形成流体作用力的峰值;当有航速时,水动力干扰对船体动力项的影响主要出现在低频区,在高频区水动力干扰影响较小,甚至无干扰.
2)横向间距不仅影响船体垂荡及横摇运动的共振幅值,还影响共振频率,当水动力干扰存在时随着横向间距的增大共振频率会变小.
3)水动力干扰仅在船体共振频率及其附近区域内对船体运动响应起作用,当船体运动频率远离船体共振频率时,即使船体间流体发生共振,对船体运动响应也不会产生大的干扰.4)三船并行航行时,中间船受干扰效应的影响是显著的,且中间船能够阻隔两侧船体间的波浪传播,进而产生遮蔽作用.当计算条件相当时,和两船并行的情况相比,三船并行时水动力干扰效应强度更大.
5)进一步开展不同尺度船舶二航速二入射波参数等因素对多船间水动力干扰的影响研究,为航行补给的安全实施提供指导意见.
参考文献(References):
[1]一FangMC,KimCH.Hydrodynamicallycoupledmotionsoftwoshipsadvancinginobliquewaves[J].JournalofShipResearch,1986,30(3):159?171.
[2]一SkejicR,FaltinsenOM.Aunifiedseakeepingandmaneuveringanalysisofshipsinregularwaves[J].JournalofMarineScienceandTechnology,2008,13(4):371?394.
[3]一KistiansenT,FaltinsenOM.Gapresonancesanalyzedbyanewdomain?decompositionmeth?odcombiningpotentialandviscousflowDRAFT[J].AppliedOceanResearch,2012,34:198?
208.
[4]一LULin,TENGBin,CHENGLiang,SUNLiang,CHENXiao?bo.Modellingofmulti?bodiesin
closeproximityunderwaterwaves fluidresonanceinnarrowgaps[J].ScienceChina:Physics,Mechanics&Astronomy,2011,54(1):16?25.
[5]一
WANGJiang?fang,LIJi?de,CAIXin?gong.Coupledmotionsoftwoshipsinwaveson3Dmethod[J].JournalofShipMechanics,2003,7(6):15?26.[6]一
LILin.Numericalseakeepingpredictionsofshallowwatereffectontwoshipinteractionsinwaves[D].PhDThesis.Canada:DalhousieUniversity,2001:15?60.[7]一
ChenG?R,FangM?C.Hydrodynamicinteractionbetweentwoshipsadvancinginwaves[J].OceanEngineering,2001,28(8):1053?1078.[8]一
McTaggartK,CummingD,HsiungCC,LIL.Seakeepingoftwoshipsincloseproximity[J].OceanEngineering,2003,30(8):1051?1063.
[9]一邓凯,李红涛,余建星.高架索航行补给中船舶在波浪中的运动性能研究[J].船舶力学,2009,13(2):217?225.(DENGKai,LIHong?tao,YUJian?xing.Behaviourofshipsinreplenishment
ofhighlinesysteminwaves[J].JournalofShipMechanics,2009,13(2):217?225.(inChi?nese))
[10]一XUYong,DONGWen?cai.Numericalstudyonwaveloadsandmotionsoftwoshipsadvan?
cinginwavesbyusingthree?dimensionaltranslating?pulsatingsource[J].ActaMechanicaSinica,2013,29(4):494?502.
[11]一ZhangS,WeemsKM,LinW?M.Numericalsimulationandvalidationofship?shipinteractions
inwaves[C]//9thInternationalConferenceonNumericalShipHydrodynamics.AnnArbor,Michigan,USA,2007:345?353.
[12]一XuX,FaltinsenOM.Timedomainsimulationoftwointeractingshipsadvancingparallelinwaves[C]//ASME201130thInternationalConferenceonOcean,OffshoreandArcticEngi?
neering,Vol6:OceanEngineering.Rotterdam,Netherlands,2011:357?369.
[13]一宗智,钱昆.三维移动脉动源法在波浪中三体船型运动求解的应用研究[J].船舶力学,2012,16(11):1239?1247.(ZONGZhi,QIANKun.Athree?dimensionalmovingandpulsatingsource(MAPS)methodforcalculatingmotionsoftrimaranhullforms[J].JournalofShipMechan?ics,2012,16(11):1239?1247.(inChinese))[14]一刘应中,缪国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1986:30?90.(LIUYing?zhong,MIAOGuo?ping.TheoriesofShip sMotionsinWaves[M].Shanghai:Shanghai
JiaoTongUniversityPress,1986:30?90.(inChinese))
[15]一XUYong,DONGWen?cai.Studyoncharacteristicsof3?Dtranslating?pulsatingsourceGreenfunctionofdeep?waterhavelockformanditsfastintegrationmethod[J].ChinaOceanEngi?
neering,2011,25(3):365?380.
[16]一戴遗山,段文洋.船舶在波浪中运动的势流理论[M].北京:国防工业出版社,2008:101?131.(DAIYi?shan,DUANWen?yang.PotentialFlowTheoryofShipMotionsinWaves[M].Bei?jing:NationalDefenseIndustryPress,2008:101?131.(inChinese))
[17]一KashiwagiM,EndoK,YamaguchiH.Wavedriftforcesandmomentsontwoshiparrangedsidebysideinwaves[J].OceanEngineering,2005,32(5/6):529?555.
[18]一许勇.波浪中近距离航行的多船水动力干扰机理研究[D].博士学位论文.武汉:海军工程大学,2012:41?99.(XUYong.Studyonthemechanismofhydrodynamicinteractionbetweenmulti?
pleshipsadvancinginwavesatcloseproximit[D].PhDThesis.Wuhan:NavalUniversityofEngineering,2012:41?99.(inChinese))
[19]一JournéeJMJ.Experimentsandcalculationson4Wigleyhullformsinheadwaves[R].Tech?nicalandResearchReportofSNAME,1992.993波浪中多船近距离并行航行的水动力干扰研究
004许一一勇一一一董一一文一一才
[20]一NoblesseF,HendrixD.Onthetheoryofpotentialflowaboutashipadvancinginwaves[J].JournalofShipResearch,1992,36(1):17?29.
HydrodynamicInteractionsBetweenMultiple
ShipsAdvancingParallelinClose
ProximityinWaves
XUYong,一DONGWen?cai
(DepartmentofNavalArchitecture,NavalUniversityofEngineering,Wuhan430033,P.R.China)
Abstract:Athree?dimensionalfrequency?domaincalculationmodelbasedonthepotentialflowtheoryandmulti?bodydynamicstheorywasdevelopedtoinvestigatewaveloadsandfreemo?tionsofmultipleclosely?spaced,hydrodynamicallyinteractingshipsadvancingparallelinwaves.Inordertoconsiderthespeedeffectsonfreesurfaceinthegapsbetweentheseshipbodies,thetranslating?pulsatingsourceGreen sfunctionwaschosentosimulatetheradiationanddiffractionwaves.Themodelwasvalidatedthroughsolvingofthehydrodynamictermsandfreemotionsoftwoparallelclosely?arrangedshipmodelsadvancingatzeroorpositiveforwardspeedsinregularwaves.Numericalresultswerealsopresentedinthecaseofthreeparallelships.Comparisonofthedynamicbehaviorsbetweenthetwo?shipcaseandthree?shipcaseshowsthatinthetwocaseshydrodynamicinteractioneffectsarequitedifferent.Thepresentedmodelisusefultopredictwaveloadsandfreemotionsofmultiplevesselsinunderwayreplen?ishmentonthesea.
Keywords:hydrodynamicinteraction;multipleships;waveloads;freemotions;translating?pulsatingsource
Foundationitem:TheNationalNaturalScienceFoundationofChina(50879090)
船舶水动力学习汇报
多体船水动力性能最新研究进展 汇报人:杨博 本次汇报内容 1、多体船发展历史 2、多体船水动力研究方法 3、多体船未来趋势
多体船发展——三体船 三体船由三个船体组成,中间的主体主尺度较大,两侧 各有一个大小相同的辅助船体。目前世界各国建造的三 体船主要有两种形式:一种是Tricat三体船, 它是两个细长片体的中间布置了一个伸出片体的船首,进而形成了一 种双体船加一个船首的三体船型,如1999年,澳大利亚 Austal公司建造的Tricat三体旅游船,该船在7级风、浪高 2.5 米的海浪下能消除船首砰击,有效地减少船在浪髙2.5 米以上的海浪中的纵摇运动;另一种是Trimaran三体船,它是一个细长船体和两个舷外浮体相结合形成的一种三 体船型,如泰晤士渡船公司建造的髙Trimaran三体船“埃 比尼泽.斯克鲁奇”号,该船在试航和使用过程中反映出 良好的快速性、机动性和稳定性。 多体船发展——三体船
多体船发展——三体船 优势:适航性优于单体船且中高速阻力性能优于单体船和双体船,具有更宽的甲板,有利于舱室的布置;三体船具有很好的隐身性,侧体的存在使得其稳性得到了提高从而提高了生存能力。 劣势:其缺点是结构复杂,重量较大,设计难度大,操纵性稍差,建造、下水、锚泊和进坞比较困难。在稳定 性较好的同时必然要承受较大的弯曲和扭转力矩 发展:英国在三体船建造实验上具有领先优势,2000年英国海军耗资1300万英镑研制的世界“海神”号试验舰 建成下水。美国最早与英国合作研制三体舰,曾一起参 与“海神”号试验,对舰体结构、运动等数据进行了记 录和分析。后来美国独立进行三体舰概念设计,2008年 建成下水的三体船型濒海战斗舰“独立号”。 多体船发展——五体船 五体船的高速状态下的阻力小,高海况下的失速 也非常小,有良好的快速性和适航性。与三体船 相比,其两对小侧体有利于提高船舶的破舱稳性 ,在高速航行时发生埋首现象的频率也比较低, 同时,其甲板面积更加宽阔,有利于总布置。五 体船的诸多特点使其非常适用于大型髙速客货渡 轮和军用舰船。
71.6m开底泥驳波浪载荷计算报告
(附件) 71.6m开底泥驳波浪载荷计算报告 2015年12月
1、概述 本船为沿海航区开底泥驳。根据中国船级社2015版《国内航行海船建造规范》(以下称《规范》)第二篇第二章2.2.1.2节的规定,由于该船的主尺度比不符合《规范》波浪载荷计算的适用条件,故本计算书按照2.2.9节的要求,对波浪载荷应采用直接计算方法确定。 2、船舶主要参数 总长LOA71.60 m 设计水线长L WL69.19 m 垂线间长L PP67.60 m 型宽 B 15.60 m 型深 D 5.00 m 设计吃水 d 3.70 m 3、计算依据的图纸资料 本计算所依据的图纸有关图纸资料如下: 序号图纸名称 1 总布置图 2 线型图 3 各种装载情况及完整稳性计算书 4 横剖面结构图 5基本结构图 4、计算模型 4.1 水动力模型 采用基于三维绕射-辐射及Morison理论为基础的WADAM程序,因此要建立 水动力面元模型。本计算书在Patran-Pre中建立水动力模型,采用右手直角坐标系,原点位于FR0、基线和中纵剖线的交点处,x轴沿船长指向船首为正方向,y轴沿船宽指向左舷为正方向,z轴向上为正方向,水动力模型见图4.1~图4-2:
图4-1 Patran-Pre环境下的Panel模型 图4-2 SESAM-HYDRO环境下的Panel模型 4.2 质量模型 质量模型对船舶波浪载荷计算的精度至关重要,质量模型和实船的重量重心差别越小,波浪载荷计算精度就越高。为此,需要实际统计全船各部分质量并按静力等效原则得到全船质量沿船长方向的分布。本计算书采用质量点和零质量棒的形式,在Patran-Pre中建立质量模型。零质量棒上两端点的间距为横摇惯性半径的两倍,质量模型见图4-3。
论述船舶动力装置设计的主要要求
论述船舶动力装置设计的主要要求: 一.总体设计要求 动力装置是一套很复杂的机电设备,各个机械设备和系统之间互相联系又互相制约。对设计的要求也是多方面的,总的要求主要可以简介为如下几个方面。1.技术性与经济性 谓技术性是指船舶能满足预定的使用要求。对运输船舶而言,主要是从动力装置设计方面考虑如何保证运输能力,如装载能力、航速、装卸效率等;对于专用的作业船舶和海洋平台,要能具备完成特定的施工或作业的能力,并能保证作业质量。保证新船的适用性是设计中处理各种矛盾时首先要考虑的因素。 提高船舶的经济性是设计工作的重要目标。船舶的经济性涉及三个基本要素,即建造成本、营运开支和营运收入。设计中的技术措施是否恰当,决策是否正确,对船舶的经济性会产生很大的影响。设计工作中必须把经济性放在十分重要的地位来考虑。有时,一项好的技术措施可能会节约大笔的投资,因此对不同用途的船舶,对于动力装置的选型就非常重要。但是,一般来说,动力装置的各项要求,往往是相互联系、相互影响的。把一个要求的指标提高,往往会使另一个要求的指标被迫降低。设计中经常遇到的是技术性能和经济性相互矛盾的情况,这就需要进行技术与经济的综合评估或论证,使之得到合理的统一。经济是技术发展的基础和动力,技术是实现经济目的的手段和工具,两者相互渗透、相互推动。 2.安全与可靠性 船舶的安全是关系到人命和财产以及环境污染的重大问题。因此,安全性是船舶的一项基本质量指标。为保证船舶的安全,政府主管机关制定了船舶设计和建造的法规,国际组织(例如IMO——国际海事组织)通过政府间的协定,制定各种国际公约和规则。这些法规公约和规则对船舶的安全措施提出了全面的要求。政府法规是强制执行的,凡是船籍国政府接受、承认或加入的国际公约和规则都纳入在法规之中,船舶设计必须满足这些法规的要求。 此外,入级船舶还要满足船级社制定的入级与建造规范,规范的规定主要也是基于船舶安全方面的考虑。总之.动力装置设计中必须严格遵守法规和规范的规定,满足法规和规范的要求,这是保证船舶安全的最基本的措施。 所以在具体的船舶动力装置选型设计当中,必须要有一个全局和综合的观念,相关和协调的思路去考虑问题,充分论证,才能做出一个合理的船舶设计。 二.船舶设计阶段的划分和工作内容 船舶总体设计的任务是针对设计任务规定的要求,制定一个既切实可行又效果良好的的工程设计。 总体设计,技任务的性伍,可分为两大类,一种叫发展性设计,一种叫生产件设计。 根据用船部门的发展计划提出,用船部门需要一种新船型,这种新船具有更复杂和更高级的要求,设计工作不能以某船为仿效典型而必须针对任务的要求进行大量的分析工作,运用不同的技术和措施,提出可能的方案,以便进行对比,然后选取其中性能优良的设计方案,这种设计称为发展性设计。对于发展性设计,其特点是要求严格,但技术上的具体约束比较小,例如机器设备的选择有较大自由度,有些特殊性的没备在建造前或建造间可能还要经过试验或试制等,它往往是性能先进的产品,常常要采用新技术和措施,因而常有一定程度的试验性.按此设计建成的第一艘新船称为原型船。原型船建成后要经过试用考验,从实践中检查新技术的使用是否成功,各种技术措施的实际性能是否与预计相符等。对试用中出现的问题和缺点,必须加以改进和再试研。如试用结果是良好的,说明设计是成功的,可以正式投入生产。如暴露出较大问题,则设计必须作较大的修改。如问题很严重,例如性能不稳定或离设汁指际较远,
船舶结构可靠性分析
大连海洋大学 船舶结构可靠性分析Analysis of the reliability of the ship structure 船舶结构可靠性分析研究综述 研究领域:船舶与海洋工程(专硕) 姓名:邓英杰 学号: 2015085223012
船舶结构可靠性分析研究综述 摘要:结构可靠性理论是60年代后才发展起来的一门新兴学科,作为结构强度理论与计算结构力学的一个新分支,具有工程实践和船舶安全评价的重大意义。本文就船舶结构可靠性分析近代的发展做了总结性的综述,从载荷、承载能力、可靠性分析方法三个角度出发,并对其今后的研究方向提出了建议。 关键词:船舶结构;可靠性;船舶安全评价;分析方法 1 前言 传统的船舶结构强度计算方法采用的是确定性方法,将船体载荷和材料力学特性等诸多因素都看做是确定性的单值量,这与实际不符,传统的确定性设计已不能满足现代船舶发展的需求,而采用概率统计的方法相比之下更为合理,进而诞生了船舶结构可靠性分析这一学科。 1969年,挪威学者Nordenstrom【1】发表船舶结构分析里程碑的一篇文章,率先将波浪载荷和船舶总纵强度的承载能力看做是随机分布的变量,进而分析船体的失效概率。1972年,美国学者对船体总纵强度的概率模型进行了系统的专题研究,船舶结构可靠性分析理论得到了进一步的发展。 上个世纪80年代中期,船舶可靠性分析方法已经建立了起来。目前,世界各大船级社都在制定以可靠性分析为基础的船舶结构设计规则。
2 载荷 对于船舶结构,静水载荷和波浪载荷是两种主要的载荷形式。 波浪载荷的理论计算是基于上个世纪50年代末的切片理论建立起来的。80年代后期,人们对波浪载荷的研究增加了许多新的内容。S.G.Stiansen【2】提出了波浪载荷的概率模型,研究了低频相应和高频效应的概率组合问题;美国学者 C.G.Soares 从当时的技术水平出发,提出了一个船舶波浪载荷效应的可靠性分析标准模式。该方法的创新性在于,在线性切片理论计算船体波浪弯矩的基础之上,将高频载荷以经验性影响因子的形式与低频波浪弯矩组合。 在早期, 波浪载荷计算中应用的大多是线性理论。随着研究的深入和实践经验的增加, 波浪载荷的非线性性质引起了人们的关注。大量的实船测量和船模试验表明, 行驶在汹涛中的高速舰船, 由于船体的非直舷, 以及底部砰击、外张砰击和甲板上浪等因素的影响, 导致舰船的运动, 特别是波浪载荷呈明显的非线性。这时, 在规则波中的运动不再具有简谐性质, 中垂波浪弯矩幅值明显大于中拱时的幅值。加突出的是, 由于底部砰击和外张砰击, 使船体剖面内出现高频振动弯矩。这种弹性振动是一种瞬态响应, 在高海况下, 两者迭加而成的中垂合成弯矩幅值将远大于线性理论的计算结果。 为了计算砰击振动弯矩,一种被称为“两步走”的方法被广泛使用,即先在刚体假设下计算船体运动和作用在其上的水动力,
船舶在波浪中航行时的安全操纵
船舶在波浪中航行时的安全操纵 关于船舶在波浪中航行的纯稳性丧失,国内外学者进行了大量的研究,文献[1]、[2]采用波浪中船舶瞬时湿表面的计算方法,得出了稳性变化与波浪要素之间的相互关系;文献[3]、[4]通过船舶操纵运动方程,运用流体动力学理论,将波浪运动的影响引人操纵方程,并对船舶稳性的影响进行了模拟计算。对于船舶驾驶员来说,仅从静态上了解衡量船舶稳性是否满足稳性规范的要求是不够的,更重要的是要从动力学的角度出发,了解和掌握在恶劣的天气条件下,船舶在波浪中的稳性变化规律,保证船舶以适应于稳性要求的姿态正确航 行。 1 稳性变化的原因分析 根据文献[5],船舶在波浪中航行时,由于船体浸水体积的变化,使得正浮时的浮心B移至B*。根据静力学理论,对于横倾θ度的船舶,波浪中的复原力臂GZ*值与静水中的复原 力臂GZ值之间的差值可由式(1)确定。 ΔGZ=(B*R-BR)-BB*Sinθ(1) 由式(1)可以看出,船舶在波浪中的稳性变化是由于形状稳性和浮心位置的变化所引起 的。 为了具体地表现这种内在的关系,把GZ改写为表示动稳性的稳性高度GM,有: GM=I/V-BG(2) 式(2)中,I为水线面的惯性矩,V为船舶水下排水体积,BG为船舶浮心至船舶重心的垂直距离。由于波浪的影响,船舶的排水体积变为V+ΔV,水线面的惯性矩变为I+ΔI,浮心由B移至B*,则GM的变化GM+ΔGM可近似地表示为: GM+ΔGM=I/V(1+ΔI/I-ΔV/V)-B*G(3) 利用BM=I/V的关系,GM的变化量ΔGM可按下式求得:
ΔGM=BM(ΔI/I-ΔV/V)-BB* (4) 通过式(4)可以看出,导致船舶在波浪中的稳性变化是由于船舶的排水体积和水线面惯性矩的变化以及浮心位置的移动而引起的。第一项为舷侧外漂和船体浸水体积变化引起的BM的变化量表示由注心上下移动引起的变化量。 2 稳性变化与海浪之间的关系 防止船舶因稳性丧失而导致倾覆,是船舶驾驶员最为关心的问题。IMO亦已通过《在随浪和尾随浪情况下避免危险局面的指南》,其目的在于给船长在随浪和尾随浪航行时提供避免危险局面的建议。对于驾驶员来说,了解船舶姿态与波浪之间相互位置关系而导致船舶稳性的变化,从而采取和选择安全的操船方案有着重要的意义。 2.1 波长与船长比(λ/L)对稳性的影响 稳性变化主要是浮在波面上的船体的水线面惯性矩I的增减引起的,并与波浪的大小和船舶的尺度有关。图l给出了在波高H固定不变,波长与船长比(λ/L)变化、以及波浪位 于船舶各种相对位置时的GZ曲线。 从图1可以看出,当船中位于波谷(ξG/λ=0)时,由于船体前后部的水线面惯性矩与静水中相比,其数值是增加的,因而船舶的稳性也是增加的;当船中位于波峰(ξG/λ=0.5)时,由于水线面的惯性矩减少了,故船舶的稳性也随之减小。另外,从图1还可以看出,这种由船体前后部水线面惯性矩的增减引起的稳性变化,当波长等于船长时,其稳性变化量最大,随着波长的增加,其稳性变化量有减少的趋向。
船舶动力装置教学内容
船舶动力装置
1.船舶动力装置的含义及组成 含义:船舶动力装置保证船舶正常航行、作业、停泊以及船员、旅客正常工作和生活所必需的机械设备的综合体。 组成:①推进装置(主发动机、推进器、传动设备);②辅助装置(船舶电站、辅助锅炉装置);③机舱自动化;④船舶系统(动力管系、船舶管 系);⑤甲板机械(锚泊机械、操舵机械、起重机械) 2.动力装置类型 类型:柴油机推进动力装置、汽轮机推进动力装置、燃气轮机推进动力装置、核动力推进动力装置、联合动力推进动力装置 ①柴油机:优点:A. 有较高的经济性,耗油率比蒸汽、燃气动力装置低得多;B. 重量轻(单位重量的指标小);C. 具有良好的机动性,操作简单, 启动方便,正倒车迅速;D. 功率范围广。缺点:A. 柴油机尺寸和重量按 功率比例增长快;B. 柴油机工作中的噪声、振动较大;C. 中、高速柴油 机的运动部件磨损较厉害; D. 柴油机低速稳定性差;E. 柴油机的过载能力相当差。 ②蒸汽轮机:优点:a. 单机功率大,可达7.5×104kW以上; b. 转速稳定, 无周期性扰动力,机组振动噪声小;c. 工作可靠性高;d. 可使用劣质燃 料油。缺点:a. 总重量大,尺寸大;b. 燃油消耗率高;c. 机动性差,启 动前准备时间约为30~35min,紧急须15~20min 。 ②燃气轮机:优点:a. 单位功率的重量尺寸小;b. 启动加速性能好;c. 振动小,噪声小。缺点:a. 主机没有反转性;b. 必须借助启动机械启
动;c. 叶片材料昂贵,工作可靠性较差,寿命短;d. 进排气管道尺寸大,舱内布置困难。 ④电力推进:交流电力推进装置具有极限功率大,效率高和可靠性好的优点(结合电力传动分析挖泥船,破冰船) 8.中间轴承 中间轴承:是为减少轴系挠度设置的支承点,用来承受中间轴本身的重量,以及因其变形或运动而产生的径向负荷(非重点) 中间轴承的设置:尾管无前轴承者,则中间轴承尽量靠近尾管前密封;中间轴承应设在轴系上集中质量处附近,如调距桨轴系的配油箱附近;每根中间轴一般只设一个中间轴承(极短中间轴不设)。(非重点) 中间轴承的位置与间距: 位置:靠近一段法兰处,距法兰端面距离0.2l 轴承间距的大小及其数目,对轴的弯曲变形、柔性和应力均有很大的影响。间距适当增加使轴系柔性增加,工作更为可靠,对变形牵制小,使额外负荷反而减小。 3.船舶动力装置性能指标
基于CFD的船舶水动力分析
基于CFD 的船舶水动力分析 1引言 近年来,随着计算机技术和计算技术的突飞猛进,计算流体力学(CFD )也得到了长足的发展。基于CFD 软件船舶水动力学方面的数值模拟,因为具有费用低、无触点流场测量、无比尺效应、能消除物模中由传感器尺寸及模型变形等因素对流场的影响、可获得较为详细的流场信息等优点而广受关注,应用范围越来越广。 船舶 CFD 是伴随着电子计算机的高速发展,与船舶流体力学相结合的数值模拟产物。船舶CFD 的应用能提高设计质量、缩短设计周期、降低设计成本,因而得到了普遍的重视,是国际船舶界十分活跃的前沿研究课题。计算流体力学在船舶流体力学领域中应用的地位正在不断上升,作用正日益增大。船舶 CFD 技术的长远目标,是代替船模试验,为船舶水动力性能设计提供一个全雷诺数的数值模拟工具。它不仅可以预报各类船舶在静水中航行时的阻力,以及与推进装置结合起来的推进性能,它还可以根据风、浪、流等环境载荷,预报实尺度船舶在海浪上的航行性能,包括快速性与波浪失速。随着计算机与信息处理技术的发展、湍流理论的突破及非线性波浪数值模拟技术的进展,这个现今还只是梦想的目标相信会在不远的将来得以实现。 2 计算模型及数值模拟 2.1数值模拟设计 纯纵荡运动是平面运动机构(PMM)可以实现的典型运动方式之一。如图1所示,纯纵荡水池中船模沿水池中心线匀速运动的同时,叠加一个纵向位移。,相应的t Z Z ωωνcos '0==。由于船模的中心线始终和船池中心线平行,即首向不变,则φ=ψ=r=0。 如图2所示,若将试验中的船模看作是静止的,则作用于船模上的水流可以沿船模X 方向的水流Fx ,速度大小随时间呈正弦(或余弦)变化,为t Z ωωνc o s 0= 。通过模拟两个方向上的水流分量,可以求得船模在做纯纵荡运动时的纵向受力Z 和力矩N 。经公式(1)(2)可以求得位置导数。 2.2数值模拟的实现 2.3数值的提取和处理 3算例 3.1舰模参数和计算与生成 3.2网格生成和边界条件 3.3计算结果 3.4数值的提取和水动力导数计算
COMPASS-WALCS-BASIC波浪载荷中文电子版
中国船级社 船舶与海洋工程线性波浪载荷 直接计算软件 COMPASS-WALCS-BASIC Copyright 2013 中国船级社 哈尔滨工程大学
COMPASS-WALCS-BASIC COMPASS-WALCS-BASIC ——软件简介 COMPASS-WALCS-BASIC是中国船级社与哈尔滨工程大学联合成立的COMPASS-WALCS波浪载荷计算软件协同创新开发团队推出三维波浪载荷计算软件,该软件是COMPASS-WALCS软件系统的基本模块,秉承哈尔滨工程大学前期十余年的研究成果,适用于三维无航速浮体及常规航速船舶的波浪载荷计算,为各种设计环境下海洋结构物的波浪载荷响应计算及设计值的确定提供依据。 软件以三维线性频域势流理论为基础,将面元法和源汇分布法相结合求解三维浮体的辐射水动力系数和绕射力,进而通过浮体的六自由度运动方程获得浮体的运动响应。软件通过悬链线理论建立了锚链系统线性化恢复力刚度系数的求解方法,可以考虑系泊锚链对浮体运动和载荷的影响。软件可以计算和输出浮体上任意位置处的运动、加速度、剖面载荷和水动压力等运动与载荷分量的频率响应函数,并可针对给定的海况资料进行各运动与载荷分量的短期预报和长期预报,进而得到设计载荷值。此外,软件还具有与通用的大型有限元分析软件的计算接口,可以方便的生成用于结构分析的载荷施加文件。 主要功能模块包括: 1) 浮体外壳的参数化建模; 2) 浮体的浮态自动计算和湿表面网格自动生成; 3) 三维无航速频域格林函数计算; 4) 大型稠密矩阵的迭代计算; 5) 一阶速度势的求解; 6) 浮体水动力系数和波浪激励力计算; 7) 锚链系统线性化恢复力刚度系数矩阵的求解; 8) 横摇阻尼的近似估算; 9) 浮体运动、压力与剖面载荷响应函数计算; 10) 运动及载荷的谱分析和长、短期预报; 11) 有限元软件的加载文件输出; 12) 计算结果的图表输出。 1
船舶动力装置课程设计
船舶动力装置课程设计 一、设计目的 1、进一步掌握舰船动力装置的基本概念和基本理论; 2、掌握船机浆设计工况选择的理论和方法; 3、掌握工况船舶采用双速比齿轮箱速比优先选计算方法; 4、掌握主机选型的基本步骤方法; 5、初步掌握船机浆工况配合特性的综合分析方法。 二、基本要求 1、独立思考,独立完成本设计; 2、方法合适,步骤清晰,计算正确; 3、书写端正,图线清晰。 三、已知条件 1、船型及主要尺寸 (1) 船型:单机单桨拖网渔船 (2) 主尺度 序号尺度单位数值 1 水线长M 41.0 2 型宽M 7.8 3 型深M 3.6 4 平均吃水M 3.0 5 排水量T 400.0 6 浆心至水面距离M 2.5 (3) 系数 名称方形系数Cb 菱形系数Cp 舯刻面系数数值0.51 0.60 0.895 (4) 海水密度ρ =1.024T/M3 2、设计航速 状态单位数值 自航KN 10.4 拖航KN 3.8 3、柴油机型号及主要参数 序号型号标定功 率(KW) 标定转速 (r/min) 柴油消耗率 (g/kw·h) 重量(kg) 外形尺寸(L× A×H)mm 1 6E150C-1 163 750 238 2500 2012×998× 1325 2 6E150C-1 220 750 238 3290 2553×856× 1440 3 8E150C-A 217 1000 228 2700 2065×1069× 1405 4 8E150C-A 289 1000 228 3500 2591×957× 1405
5 6160A-13 164 1000 238 3900 3380×880× 1555 6 X6160ZC 220 1000 218 3700 3069×960× 1512 7 6160A-1 160 750 238 3700 3380×880× 1555 8 N-855-M 195 1000 175 1176 9 NT-855-M 267 1000 179 1258 1989×930× 1511 10 TBD234V8 320 1000 212 4、齿轮箱主要技术参数 序号型号 额定传递能 力kw/(r/min) 额定输入 转速 (r/min) 额定扭 矩N*m 额定推 力KN 速比 1 300 0.184--0.257 750--1500 1756.2-- 2459.8 49.0 2.04,2.5,3 ,3.53,4.1 2 D300 0.184--0.257 1000-2500 1193.64- -2459.8 49.0 4,4.48,5.0 5,5.5,5.9, 7.63 3 240B 0.18 4 1500 1756 30--50 1.5,2.3 4 SCG3001 0.16--0.22 750--2300 30--50 1.5,2.3,2. 5,3.5 5 SCG3501 0.257 750--2300 1.3,2.3,2. 5,3.5,4 6 SCG3503 0.25 7 1000-2300 4.5,5,5.5, 6,6.5,7 7 SCG2503 0.184 1000-2300 4,4.5,5,6, 6.5,7 8 GWC3235 0.45--1.35 --1800 4283--12 858 112.7 2.06,2.54, 3.02,3.57, 4.05,4.95 5、双速比齿轮箱主要技术参数 序号型号额定传递能 力 kw/(r/min) 额定输入转 速(r/min) 额定推力 KN 速比 1 GWT36.39 0.42--1.23 400--1000 98.07 2--6 2 GWT32.35 0.52--1.32 --1800 112.78 2--6 3 MCG410 0.74--1.8 4 400--1200 147.0 1--4.5 4 S300 0.18--0.26 750--2500 49.03 2.23,2.36,2.52,2.56
船舶水动力节能装置概述
船舶水动力节能装置概述 常用的水动力节能装置具有节能效果明显、适用范围广泛、结构简单、易于安装、使用安全可靠等特点。下面是几种船舶水动力节能装置介绍: 1.补偿导管 补偿导管安装于船艉桨前舯剖面附近两侧(对于单桨船也有只安装左侧),偏置于桨轴上方,是具有机翼型剖面的半圆形或长L形导流装置。补偿导管一方面加速螺旋桨上部进流,使桨盘面进流更加均匀,提高了推进效率,另一方面减少艉部的流动分离,降低了形状阻力,同时可调整螺旋桨进流的预旋程度,减少艉流中的旋转能力损失。如果补偿导管的安装角适当,它还可以产生附加推力,即它产生的推力比其自身的阻力要大。 2.反应舵 反应舵通过扭曲舵叶剖面来适应螺旋桨的尾流,使舵产生一个正推力。一般螺旋桨负荷越重,螺旋桨尾流切向分量越大,反应舵的节能效果更好。反应舵的节能效果约为2%~3%。随着现代船舶的大型化、主机的高功率化,采用反应舵既可以节能,还有利于解决舵空泡。 9000TEU集装箱船自航试验结果显示:在相同阻力情况下,满载状态时反应舵的收到功率比挂壁舵减少 1.3%左右,结构吃水状态时反应舵的收到功率比挂壁舵减少1.5%左右。舵空泡试验结果表明,采用带有扭曲剖面的反应舵,有助于消除或减小舵叶吸力面片状空泡。
3.舵球和舵球鳍 舵球为对称形回转体,装于毂帽后部的舵叶上,其中心线和桨轴中心线重合,在打舵角即可以拆卸螺旋桨的条件下,舵球端部尽可能靠近桨毂帽。舵球可以消除或减小毂涡,减缓尾流收缩,减少能量损失,提高推进效率。舵球的节能效果一般为1%~3%,当舵叶较薄或与桨间距较大时,其效果更明显。 在舵球鳍装于舵叶两侧桨轴中心线延长线上,可以回收一部分螺旋桨尾流中损失的旋转能量,并将其转化为推力。 舵球和舵球鳍单独使用的节能效果较小,通常两者可以组合使用,以获得更好的效果。目前舵球和舵球鳍已在很多实船上应用,节能效果在4%~7%左右。 4.桨毂帽鳍 桨毂帽鳍是固定在螺旋桨桨毂帽上的小鳍,其叶数与桨叶数相同,直径为螺旋桨直径的25%左右。其作用主要是消除毂涡,回收螺旋桨漩涡能量,从而起到节能和减振降噪的效果。通常桨叶数越少,比如三叶、四叶,螺距比越大的螺旋桨,桨毂帽鳍的节能效果愈加明显。另外,桨毂帽鳍相对于螺旋桨桨叶的安装角度对于其节能效果影响很大,为此必须保证正确的桨毂帽鳍安装角,否则效率收益将丧失殆尽。试验结果表明,螺旋桨安装了桨毂帽鳍后,敞水效率可提高3%~4%。 目前,桨毂帽鳍已在许多实船上使用,节能效果均在3%以上。通常,由于尺度效应的影响,桨毂帽鳍在实船上的节能效果比模型试
船舶动力装置课程设计苏星
、设计目的 1、进一步掌握舰船动力装置的基本概念和基本理论; 2、掌握船机浆设计工况选择的理论和方法; 3、掌握工况船舶采用双速比齿轮箱速比优先选计算方法; 4、掌握主机选型的基本步骤方法; 5、初步掌握船机浆工况配合特性的综合分析方法。 、基本要求 1、独立思考,独立完成本设计; 2、方法合适,步骤清晰,计算正确; 3、书写端正,图线清晰。 三、已知条件 1、船型及主要尺寸 (1)船型:单机单桨拖网渔船 (2)主尺度 (3)系数 ⑷海水密度P =M3
2、设计航速 3、柴油机型号及主要参数
4、齿轮箱主要技术参数 5、双速比齿轮箱主要技术参数 1、船体有效功率,并绘制曲线
2、确定推进系数 3、主机选型论证 4、单速比齿轮箱速比优选,桨工况特性分析 5、双速比齿轮箱速比 6、综合评判分析 五、参考书目 1、渔船设计》 2、船舶推进》 3、船舶概论》 4、船舶设计实用手册》(设计分册) 六、设计计算过程与分析 1、计算船体有效功率 ⑴ 经验公式:EHP=(EOA E)AV L 式中:EHP ---- 船体有效马力, A 排水量(T),L 船长(M)。在式①中船长为时,A E的修正量极微,可忽略不计。所以式①可简化为EHP=EA V L。 根据查《渔船设计》 5、可知EO 计算如下:船速v= X 十=S, L=,C p=;V/(L/10)3= - /(41 - 10)3=;v/ Vgl=VX 41)=; 通过查《渔船设计》可得E0=。 (2)结果:EHP=E(O AXV L = 2、不确定推进系数 (1)公式PX C=P/ P s=n c Xn sXn pXn r 式中P E:有效马力;P s:主机发出功率;n C:传动功率;n S:船射效率;n P: 散水效率;n r :相对旋转效率。 2)参数估算 伴流分数:w=-= 推力减额分数:由《渔船设计》得t= -=
船舶静止在波浪上的外力计算
船舶静止在波浪上的外力计算 一、整体计算过程(计算思路) 两个假设: 1、假设船舶以波速在波浪的前进方向上航行,即船与波的相对速度为零; 2、假设船体是在重力和浮力作用下静平衡于波浪上的一根梁。 计算思路: 1、船舶外力计算的目的是进行强度校核,应保证: []max σσ≤ 其中,max σ为船体断面最大正应力,[]σ为许用应力。 2、应力计算根据梁的弯曲理论由下式给出: M Z I σ=? 其中,M 为计算断面的弯矩;I 为横断面绕水平中和轴的惯性矩;Z 为计算应力点到中和轴的距离。 3、船体梁在载荷作用下纵纵弯曲产生的弯矩有两部分构成:静水力弯矩和波浪附加弯矩: s M M M ω=+ 整体计算步骤: 1、计算不同装载状态下静水弯矩和波浪附加弯矩以及静水剪力和波浪附加剪力; 2、计算总纵弯矩; 3、计算船体断面的最大正应力; 4、根据许用应力进行强度校核。 波浪要素和装载状态: 1、计算波浪附加弯矩时,标准波浪的波形取为坦谷波; 2、应考虑四种装载状况:满载出港、到港,压载出港、到港
二、各部分计算过程详解 1、静水弯矩计算 两个必要条件:1)船体浮力等于重力;2)重心和浮心在同一铅垂线 静水弯矩计算核心公式: ()()() ()()()()00x x q x x b x N x q x dx M x N x dx ω=-?=???=? ?? 静水力弯矩计算步骤: 1) 绘制重量曲线; 2) 绘制浮力曲线; 3) 求出重量曲线和浮力曲线的差值()q x ,作为船体梁的载荷强度; 4) 根据上面的公式计算静水弯矩。 重量曲线绘制方法: 绘制重量曲线时,必须根据静力等效原则合理分布,满足以下四个要点:重量不变,重心不变,范围一致,均匀分布 围长法:核心是假设船体结构单位长度重量与剖面围长成比例; 抛物线法:核心是假定船体与舾装品总重量构成的重量曲线可以用抛物线和矩形之和来表示; 梯形法:将船体重量近似地用梯形曲线表示; 局部性重量:根据静力等效原则进行合理分布。 浮力曲线绘制方法: 浮力曲线由邦戎曲线得出,由于船舶并非处于平浮状态,所以必须进行纵倾调整,调整方法为解析法和逐步近似法,其中逐步近似法计算过程: ● 按给出的平均吃水m d ,浮心纵向坐标b x ,水线面漂心f x 以及纵稳心半径R ,计算首尾吃水: 22g b f m f g b a m f x x L d d x R x x L d d x R -???=+- ??????-???=-+ ????? ● 确定首尾吃水后,利用邦戎曲线求出对应吃水线时的浮力曲线,可计算出排水体积1V 和浮心纵向坐标1b x 的第一次近似值; ● 将求的的两个数值与给定的排水体积0V 及重心纵向坐标g x 比较,相差较大时,必须作第二次近似计算,由下式确定新的首尾吃水:
波浪载荷预报的目的
波浪载荷预报的目的,是以规则波中的载荷响应为基础,通过理论计算,确定船舶在给定的时间运行于实际海清中的波浪载荷变化特性。波浪载荷预报常分为短期预报和长期预报两类。短期预报的时间范围为半小时到数小时,在此时间内,船的装载状态、航速、航向角以及海清都可以认为是固定不变的。长期预报的时间范围是数年或整个寿命期,在此时间内,上述因素都会改变的,长期预报是由许多短期预报组成。一旦船舶运行海域和概率水平确定后,即可得到对应的波浪载荷特征最大值X max。此值表示船舶在波浪遭遇 次数为n的整个使用期内,最可能出现的最大波浪载荷。计算结果包括传递函数、短期预报和长期预报。其中图中“LFy'’代表横向对开力,"LFz" 代表横垂向剪力,"LMx”代表横垂向弯矩,"LMy"代表纵摇有关扭矩,"VWSF'’代表垂向波浪剪力,,},.j,M,’代表波浪扭矩,"VWBM”代表垂向波浪弯矩,"HWBM”代表水平波浪弯矩。 三体船纵向波浪载荷长期预报值沿船长的变化见图42一45。横坐标为沿船长的站号,纵坐标为载荷的长期预报值,响应是单幅值。纵垂向剪力沿船长变化呈双峰现象,且靠近船舰处的峰值大于靠近船舷处的峰值;纵向扭矩、纵垂向弯矩、水平弯矩都在船肿附近取 得最大值,且越靠近船舷舰方向越小。c1)横向波浪载荷与纵向波浪载荷都是三体船较为重要的波浪载荷。 (2)一般三体船主要横向波浪载荷在横浪时较大、主要纵向波浪载荷在顶浪时较大、 而横、纵向扭矩在斜浪时较大,所以在进行结构分析和强度衡准时,应采用不同的载荷工况分别分析计算。 (3)就纵向波浪载荷而言,三体船两个较小的片体对纵向扭矩影响较大。而对纵垂向 弯矩和水平弯矩影响不大。 (4)在相同的海浪统计资料下,采用不同的极限有义波高对长期预报结果也有影响, 极限有义波高越大,长期预报值也就越大。 根据本文的计算结果,可了解高速三体船的波浪载荷特征,为结构的进一步优化设计提供了重要依据和相关规范公式的修改提供参考。
船舶动力装置课程设计说明书
《船舶动力装置原理与设计》 说明书 设计题目:民用船舶推进轴系设计 设计者:陈瑞爽 班级:轮机1302班 华中科技大学船舶与海洋工程学院 2015年7月
一.设计目的 主机与传动设备、轴系和推进器以及附属系统,构成船舶推进装置。因此,推进装置是动力装置的主体,其技术性能直接代表动力装置的特点。推进装置的设计包括轴系布置、结构设计、强度校核以及传动附件的设计与选型等,而尾轴管装置的作用是支承尾轴及螺旋浆轴,不使舷外水漏人船内,也不能使尾轴管中的润滑油外泄,因此,尾轴管在推进系统设计中意义重大。本设计是根据指导老师给出的条件,对船舶动力装置进行设计,既是对课程更深入的理解,也是对自身专业能力的锻炼。 二,设计详述 2.1:布置设计 本船为单机单桨。主机经减速齿轮箱减速后将扭矩通过中间短轴传给螺旋桨轴和螺旋桨。本计算是按《钢质海船入级规范》(2006年)(简称《海规》)进行。 因此,我们将轴系布置在船舶纵中剖面上,其中,轴的总长为9000mm,轴系布置草图及相关尺寸,见图1。 图1 2.2:轴系计算
(一):已知条件: 1.主机:型号:8PC2-6 型式:四冲程,直列,不可逆转,涡轮增压,空冷船用柴油机 缸数:8 缸径/行程:400/460mm 最大功率(MCR):4400kW×520rpm 持续服务功率:3960kW×520rpm 燃油消耗率:186g/kW·h+5% 滑油消耗率:1.4g/kW·h 起动方式:压缩空气3~1.2MPa 生产厂:陕西柴油机厂 2.齿轮箱:型号300,减速比3:1。 3.轴:材料35#钢,抗拉强度530MPa,屈服强度315MPa。 4.键:材料45#钢,抗拉强度600MPa,屈服强度355MPa。 5.螺栓:材料35#钢,抗拉强度530MPa,屈服强度315MPa (二):轴直径的确定 根据已知条件和“海规”,我们可以计算出轴的相关数据,计算列表见表3.1: 表3.1轴直径计算 考虑到航行余量,轴径应在计算的基础上增大10%。故最终取297.70 mm 根据计算结果,取螺旋桨轴直径为379.96 mm,中间轴直径为297.70mm。 上表螺旋桨直径计算中,F为推进装置型式系数
船舶在波浪中
船舶在波浪中 的运动 学号:M93520070 姓名:赖建中
?简介 ?操纵数学模式 ?运动数学模式 纵移(Surge)、横移(Sway)、上升下潜(Heave)、横摇(Roll)、纵摇(Pitch)、偏摇(Yaw)
? 船舶在海上行进时的反应是一个非常复杂的非线性现象,因为不只有波浪作用力,同时船本身也有一个前进的动力存在。 ? 规则波 单方向不规则波 多方向不规则波 操纵数学模式 ? 使用日本MMG( Mathematical Modeling Group)流力模式。 ? 船舶、螺桨、舵单独性能为基础再加上三者的扰动效应。 ? 只考虑船舶纵移(surge)、横移(sway)、平摆(yaw)、横摇(roll)。 坐标系 ? 空间固定坐标 ? 船体固定坐标 ? 船体固定坐标与水面平行。 ? 地球公转与自转效应忽略。 →→
运动方程式 ? 如果将 定在船体重心 上 ? 不考虑起伏(heave)、纵摇(pitch) ? 角速度 ? 重心速度相对于空间固定坐标的转换 ? 重心速度相对于水的速度转换成相对于地球的速度。 船舶-流体力与力矩,附加质量和黏滞度影响 ? 流体力系数可视为只与船舶之瞬间运动状态有关,此即所谓的准定态(quasi-steady)处理方式。 ? 考虑横摇运动 O G ()()() H eave X m u w p vr Sur ge Y m v ur w p Sw ay Z m w vp uq ??? ?? ?? =+-=+-=+- ()()() R ol l Pi t ch Yaw x z y y x z z y x K I p qr I I M I q r p I I N I r pq I I ??? ?? ?? =+-=+-=+- () pr op ps I I n Q Engi ne += () () X m u vr Y m v ur ?? ??? =-=+ p q r φ θ???????? ??? 00cos si n si n cos X u v Y u v ???? ?????=-=+
【开题报告】80m矿砂船波浪载荷计算
开题报告 船舶与海洋工程 80m矿砂船波浪载荷计算 一、综述本课题国内外研究动态,说明选题的依据和意义: (一)国内外研究动态 船舶的波激振动是大型船舶在较低海况下可能产生的船体较大幅度的二节点振动现象, 波激振动引起的船体垂向弯矩甚至可达到波浪弯矩的二分之一以上, 由此引起比较严重的船体结构疲劳问题, 当船舶尺度越大时, 波激振动现象就可能越严重。 林吉如(1995)[1]对超大型油轮的波激振动的发生机理进行了实船测量和船模试验研究, 还探讨了波激振动对超大型油船总纵强度及疲劳寿命的影响。在实船测试中,他对船中甲板应力进行谱分析和滤波后发现该船在7至9级风的海况下确实存在波激振动现象。波激振动应力叠加到波浪诱导应力上去后会使船体总纵弯曲应力增加 13%~17%。通过模型试验, 发现超大型油船在规则波顶浪中匀速航行时, 当波浪遭遇频率和船体二节点固有振动频率接近时, 就会激起船体共振, 产生所谓的线性波激振动现象。一旦波浪遭遇频率稍微偏离共振频率, 波激振动现象马上消失。因此, 他认为影响波激振动的最敏感因素是航速和航向。他还发现波激振动产生的弯矩的无因次系数可能数倍于油船设计波浪诱导弯矩的无因次系数值, 波激振动产生的船体应力在船中剖面附近最大, 并逐渐向首尾两端减小。 顾学康等(2000)[2]根据试验和理论方法对规则波中垂向弯矩的高阶调和成分进行了研究。研究表明如果弯矩的较高阶成分等于船体梁的特征频率, 则这个高阶的成分可能会导致波激振动的发生, 即所谓的非线性波激振动。Dudson等(2001)[3]则提到波浪载荷的二阶或倍频成分可能会对波激振动的产生有所贡献(尽管没有在他们的模型试验中得到证实)。Jensen 等(2004)[4] 认为对传统的船舶来说, 如果弯曲刚度小、航速高和非线性激励严重, 则波激振动可能会比较严重。顾学康等(2004)[5]对一超大型油船进行了线性(船体梁一阶振动频率等于遭遇波频)与非线性(船体梁一阶振动频率等于遭遇频率的整数倍)波激振动试验, 对油船波激振动响应特征及其对结构疲劳的贡献进行了研究。通过试验发现, 零航速时, 按波浪遭遇频率变化的低频波浪弯矩能量较大
ITTC及船舶水动力学研究方向与重点分析
ITTC及船舶水动力学研究方向与重点分析 中船重工集团七○二所沈泓萃 摘要:本文介绍了1933年以来国际拖曳水池会议(ITTC)组织章程和技术结构的演变过程,分析了ITTC各技术委员会的任务和研究结论,并运用系统分析的概念和方法,对第21~25届ITTC的研究进行了梳理,指出了ITTC范围内船舶与海洋工程水动力学研究领域的重点发展方向和热点研究问题,可供国内拟制该领域的未来发展规划和计划作参考。 关键词:ITTC、水动力学、发展规划
目录 1 前言 (1) 2 ITTC发展史简介 (1) 2.1 ITTC组织与章程的演变 (3) 2.2 ITTC EC和AC的演变 (4) 2.3 ITTC TC结构的演变 (5) 3 ITTC水动力学研究任务与发展方向分析 (7) 3.1 一般委员会的技术任务和结论分析 (7) 3.1.1 阻力与流动研究领域 (11) 3.1.2 推进研究领域 (12) 3.1.3 操纵性研究领域 (14) 3.1.4 耐波性研究领域 (15) 3.1.5 海洋工程研究领域 (17) 3.2 专家委员会的技术任务和结论分析 (19) 3.2.1 功率性能专题研究方向 (24) 3.2.2 非常规推进专题研究方向 (25) 3.2.3 空泡与脉动压力专题研究方向 (26) 3.2.4 波浪中的稳性专题研究方向 (28) 3.2.5 海洋环境模拟专题研究方向 (28) 3.2.6 高速船专题研究方向 (30) 3.2.7 冰海航行性能专题研究方向 (31) 3.2.8 共性基础技术专题研究方向 (32) 4 ITTC水动力学研究重点分析 (33) 4.1 概念探索研究重点 (34) 4.1.1 真实海洋风浪流环境建模 (34) 4.1.2 高雷诺数下平台周围湍流流动现象和响应 (34) 4.1.3 自由面现象和响应 (35) 4.1.4 空化现象和响应 (35) 4.1.5 学科交叉耦合 (35)
基于CFD方法的船舶水动力性能预报及优化
基于CFD方法的船舶水动力性能预报及优化CFD方法因其预报精度高、适用性广、计算结果稳定、可重复性高、成本低廉、周期短等优势,在各领域受到广泛关注。CFD方法在船舶水动力学性能的研究中主要集中在三个方面:船舶水动力性能预报、船舶水动力问题机理研究以及船舶水动力性能优化。 本文使用CFD方法对船舶水动力性能预报、机理研究以及优化展开研究。首先,对CFD基本原理进行阐述。 根据船舶水动力学问题的特点,详细叙述了控制方程、有限体积离散、边界条件、湍流模型等。此外,对CFD不确定度分析展开研究。 提出一种可考虑因子间交互作用的多因子CFD不确定度分析方法,并使用该方法对船舶静水总阻力预报展开不确定度分析。分析中包括网格尺寸、时间步长、网格形式和湍流模型四个因子。 该方法是对原方法方法改进而来,使用正交试验方法替代原方法中的控制变量法,可对各因子同时展开分析。该方法中,各因子的不确定度分析同时展开,分析中考虑了各因子间的相互影响。 且由于各因子同步进行分析,解决了原方法中各因子独立分析时其他因子的参数设置依赖于经验的问题。其次,使用CFD方法预报船舶水动力性能,包括船舶静水阻力、螺旋桨水动力性能、船舶操纵性及船舶耐波性等。 在船舶水动力性能预报的基础上,发挥CFD方法的优势,对三个特殊的船舶水动力问题的机理展开研究。包括船舶航态对静水总阻力预报精度的影响、螺旋桨尺度效应问题以及四桨船内外桨载荷分布不均匀产生的原因。 对于船舶航态对静水总阻力预报精度的影响,对比了航态对过渡型船舶和排
水型船舶的静水阻力预报精度的影响。对于螺旋桨尺度效应问题,使用全相似方法对螺旋桨尺度效应问题进行分析,结果表明在全相似条件下,模型尺度和实尺度螺旋桨的尺度效应基本消除。 在对四桨船内外桨载荷分布不均匀性问题的研究中,发现螺旋桨周围流场存在3个区域:尾流区、加速区和减速区。尾流区为螺旋桨正后方(桨盘范围内)区域,该区域内流体流速极大。 布置在此区域内的螺旋桨载荷将大幅减小。螺旋桨前方区域为加速区,该区域内流体加速,布置在该区域的螺旋桨载荷减小。 螺旋桨后方除尾流区以外的区域为减速区,该区域内流体减速,布置在该区域的螺旋桨载荷增大。从而揭示出四桨船内外桨载荷分布不均匀产生的机理。 最后,对船舶水动力性能优化中的关键技术——船体几何重构方法展开研究,提出一种新的船体几何重构方法——自融合方法。自融合方法以原始船型的横剖面为基本单元进行融合操作,产生新的船体横剖面,并以新横剖面为基础进行重构生成新的船体曲面。 该方法具有参数数量少、船体变形空间大、重构后的曲面光顺等特点。将其与CFD方法和遗传算法结合,对船舶水动力性能展开优化,包括全船外形优化、船体局部外形优化、混合优化及多目标优化,较为全面的展示了自融合方法在船舶外形优化中的应用。