机械式温控器说明及接线原理图
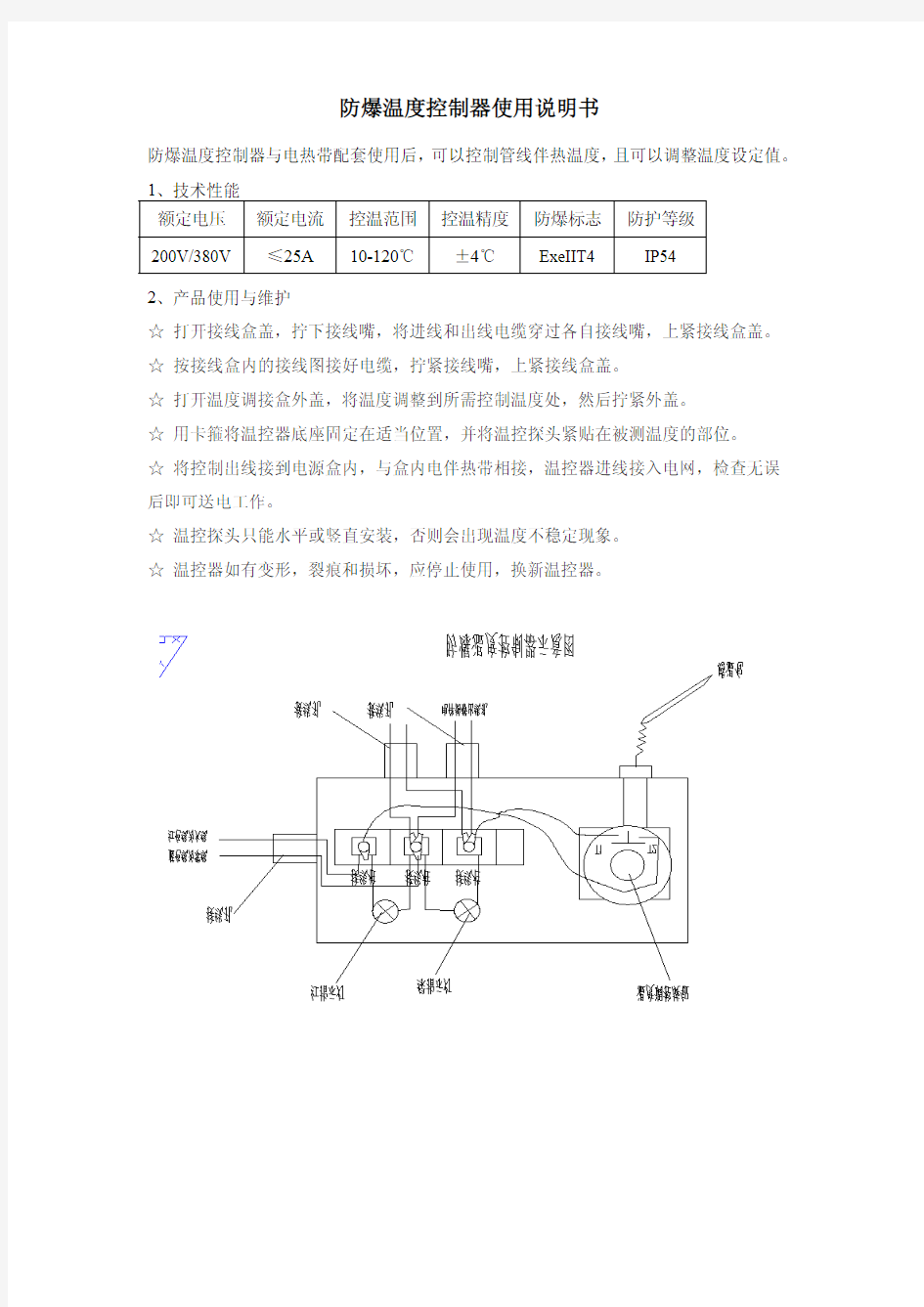
防爆温度控制器使用说明书
防爆温度控制器与电热带配套使用后,可以控制管线伴热温度,且可以调整温度设定值。
1、技术性能
额定电压额定电流控温范围控温精度防爆标志防护等级
200V/380V≤25A10-120℃±4℃ExeIIT4IP54
2、产品使用与维护
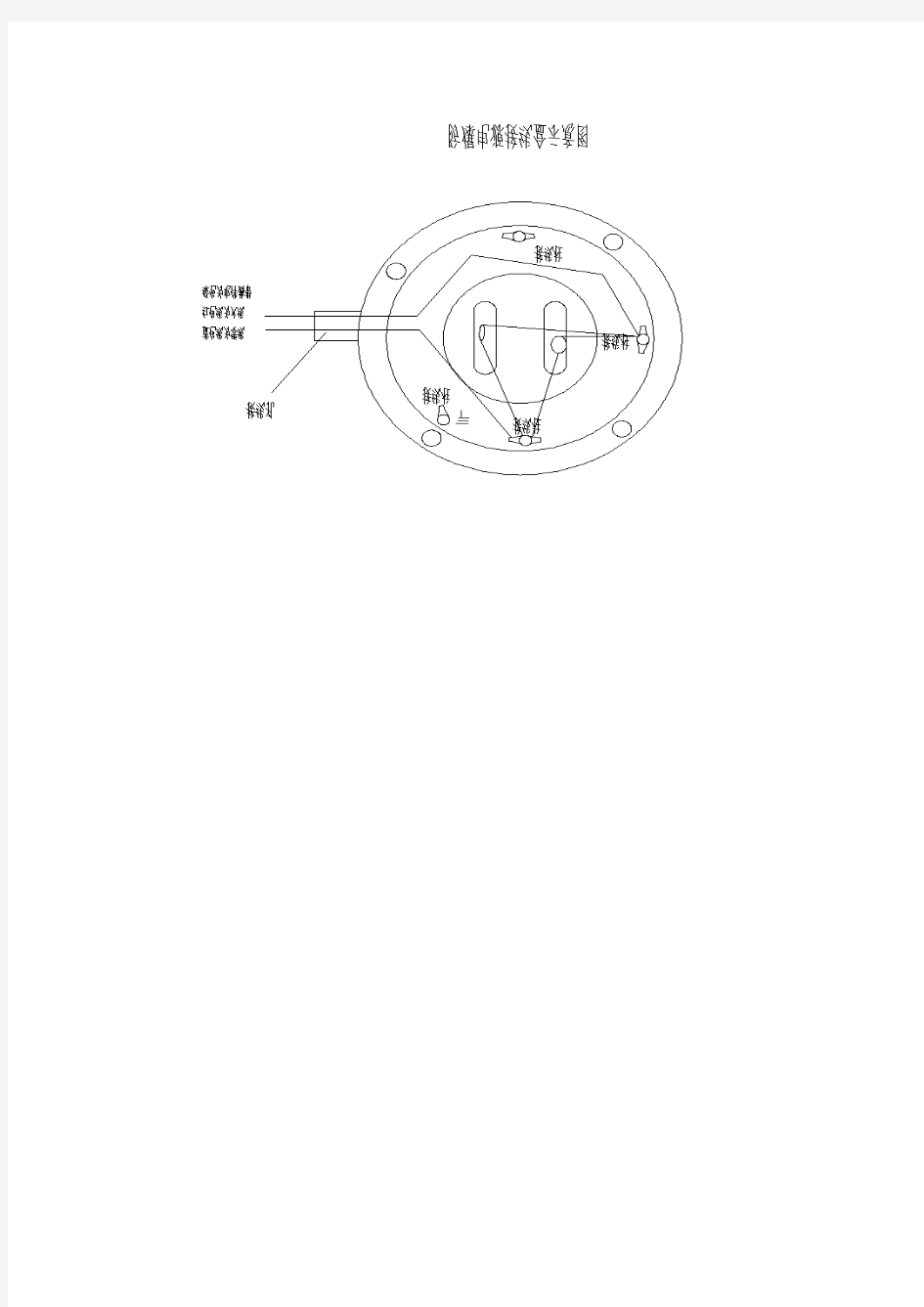
☆打开接线盒盖,拧下接线嘴,将进线和出线电缆穿过各自接线嘴,上紧接线盒盖。☆按接线盒内的接线图接好电缆,拧紧接线嘴,上紧接线盒盖。
☆打开温度调接盒外盖,将温度调整到所需控制温度处,然后拧紧外盖。
☆用卡箍将温控器底座固定在适当位置,并将温控探头紧贴在被测温度的部位。
☆将控制出线接到电源盒内,与盒内电伴热带相接,温控器进线接入电网,检查无误后即可送电工作。
☆温控探头只能水平或竖直安装,否则会出现温度不稳定现象。
☆温控器如有变形,裂痕和损坏,应停止使用,换新温控器。
关节型搬运机器人设计..
关节型搬运机器人设计 摘要 随着现代工业机器人技术的发展,工业机器人的使用迅速增长。本文通过对国内外工业机器人的分析,并结合搬运所需要的条件,设计出了工厂自动化生产和生产线使用的搬运机器人。 本文着重对搬运机器人的总体设计方案、机构及控制系统从理论上进行了详细的分析和设计。在搬运机器人总体设计中,采用了应用最为广泛的平面关节型;在机构设计中,主要设计了搬运机器人末端执行器、手腕、手臂和腰的机械结构;在末端执行器设计上采用了一种具有接近觉、接触觉及滑动觉的初级智能机械手;在控制系统的设计中,采用可编程控制器(PLC)进行控制,并对控制系统的硬件原理做了分析,对PLC 的程序也进行了编译;在驱动系统设计中,采用了气动和电机两种驱动方式,主要动作采用电机驱动。 关键词:搬运机器人,三感觉机械手,可编程序控制器 Design of the joint transporting robot Abstract Under the development of the modern industrial robot’s technology , the use of industrial robot increases rapidly. Through analyzing the domestic and foreign industrial robots, combing the conditions of the transportation, the transporting robot for the factory automation produce and the production line is designed in this article. The emphasis on this article is to analyze and design the transporting robot in theory. The analytical objects include the total scheme, the mechanism design, and the control system design. In the total scheme design, the most wildly applied plane joint type is chosen. In the mechanism, the transporting robot’s end-effector, the wrist, the arm and the waist are mainly designed. A kind of the approaching sense, the contact sense and the skidding sense primary intelligence manipulator is adopted in the end-effector; In the control system, the programmable controller (PLC) is used, the principle of hardware is analyzed and the programs in PLC are compiled. In the actuating system, two driving types are used which include the pneumatic operation and the motor. The main movement is driven by the motor. Key words: Transporting robot, three feelings manipulators, programmable controller (PLC)
安防监控使用说明书
安防监控使用说明书公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
目录
第1章概述 集中监控管理系统主要应用于监控中心、值班室等场合,具备实时视频监控、摄像机云台控制、录像检索回放、录像备份下载等基础功能,其中客户端还具备接收和处理报警、辅屏预览、控制解码器上电视墙等应用。 第2章运行和使用 1.用户登录 第一步:双击桌面客户端图标,显示如下登录框。 第二步:输入用户名、密码、中心服务器IP地址与端口等相关信息。默认情况下:用户名:密码端口为 . 第三步:点击《确定》。勾选《记住密码》,保存本次输入的用户名和密码。2.软件界面及菜单介绍 软件主界面分7个部分,如下图所示: 系统功能键:键入监控视图、录像回放 监控组织树:组织资源机构管理。显示整个系统的组织,区域和通道,通过搜索框可以进行通道摄像机的搜索。
控制面板:提供视频播放时的图像控制,包括云台控制,预置点设置和调用,巡航设置和调用、轨迹记录和调用,视频参数调节等。 报警信息菜单:显示客户端接收到的报警信息,对报警信息确认处理等操作。 系统信息:显示CPU占用率,内存占用率信息。 播放面板: 第3章实时监控 点击标签栏《监控视图》,进入监控软件播放界面。初次启动时,播放面板以2*2播放窗口显示,也通过画面分割按键进行窗口分割的选择。 云台控制:在播放界面,可对正处于播放状态的通道进行云台控制操作。通过方向键控制云台 8 个方向的转动,通过乌龟显示图标可控制云台转动的速度。 软件还提供了另外一种云台控制方式——屏幕云台控制。用户可以通过在播放窗口中点击图像上点击鼠标右键选择云台控制选项进行云台控制。云台界面显示如下图: 第4章录像回放 软件支持常规回放、分段回放和事件回放。 常规回放:监控软件根据录像存放位置查找回放录像文件。每个窗口回放一个通道。 分段回放:将同一通道的录像资料按窗口数分割成相等的时间段,每个窗口
监控系统组成、设备简介、原理
有关完整的闭路监控系统组成、设备简介、原理 2008-09-05 09:11:16| 分类:技术|字号订阅 一、闭路监控系统组成 典型的电视监控系统主要由前端设备和后端设备这两大部分组成,其中后端设备可进一步分为中心控制设备和分控制设备。前、后端设备有多种构成方式,它们之间的联系(也可称作传输系统)可通过电缆、光纤或微波等多种方式来实现。如图1-1所示,电视监控系统由摄像机部分(有时还有麦克)、传输部分、控制部分以及显示和记录部分四大块组成。在每一部分中,又含有更加具体的设备或部件。 1. 1 主要设备 1. 1. 1 摄像部分 摄像部分是电视监控系统的前沿部分,是整个系统的“眼睛”。它布置在被监视场所的某一位置上,使其视场角能覆盖整个被监视的各个部位。有时,被监视场所面积较大,为了节省摄像机所用的数量、简化传输系统及控制与显示系统,在摄像机上加装电动的(可遥控的)可变焦距(变倍)镜头,使摄像机所能观察的距离更远、更清楚;有时还把摄像机安装在电动云台上,通过控制台的控制,可以使云台带动摄像机进行水平和垂直方向的转动,从而使摄像机能覆盖的角度、面积更大。总之,摄像机就像整个系统的眼睛一样,把它监视的内容变为图像信号,传送给控制中心的监视器上。由于摄像部分是系统的最前端,并且被监视场所的情况是由它变成图像信号传送到控制中心的监视器上,所以从整个系统来讲,摄像部分是系统的原始信号源。因此,摄像部分的好坏以及它产生的图像信号的质量将影响着整个系统的质量。从系统噪声计算理论的角度来讲,影响系统噪声的最大因素是系统中的第一级的输出(在这里即为摄像机的图像信号输出)信号信噪比的情况。所以,认真选择和处理摄像部分是至关重要的。如果摄像机输出的图像信号经过传输部分、控制部分之后到达监视器上,那么到达监视器上的图像信号信噪比将下降,这是由于传输及控制部分的线路、放大器、切换器、等又引入了噪声的缘故。 除了上述的有关讨论之外,对于摄像部分来说,在某些情况下,特别是在室外应用的情况下,为了防尘、防雨、抗高低温、抗腐蚀等,对摄像机及其镜头还应加装专门的防护罩,甚至对云台也要有相应的防护措施。这些也将在后面的有关章节中讨论。 1. 1. 2 传输部分 传输部分就是系统的图像信号通路。一般来说,传输部分单指的是传输图像信号。但是,由于某些系统中除图像外,还要传输声音信号,同时,由于需要有控制中心通过控制台对摄像机、镜头、云台、防护罩等进行控制,因而在传输系统中还包含有控制信号的传输,所以我们这里所讲的传输部分,通常是指所有要传输的信号形成的传输系统的总和。
平面关节型机械手设计
平面关节型机械手设计 设计任务书 一、通过设计平面关节型机械手,培养综合运用所学知识,分析问题和解决问题的能力。 有关资料:上下料搬运机械手,个自由度,平面关节型;需要搬运的工件:环类零件,内孔直径;高,厚,(只能从内孔夹持工件),材料钢,将工件从一条输送线搬运到与之平行的另一条输送线上,(两输送线距离为,高度差)。 要求:设计方案和计算正确,叙述清楚,图纸符合规范。 二、图纸: .机械手机构简图 .工作空间投影图 .机械手传动原理图 .机械手装配图 .零件图 三、实习: .本校机械实验室组装各类机械手模型。 .学习工业机械人设计方面知识。 五、进度: 月日到月日实习,拟订设计方案 月日到月日机械手传动原理图 月日到月日机械手装配图
月日到月日零件图 月日到月日写说明书 引言 平面关节型机械手是应用最广泛的机械手类型之一,既可以用于实际生产,又可以用于教学实验和科学研究。用于实际生产,它能够满足装配作业内容改变频繁的要求;用于教学实验,它能够使人直观地了解机器人结构组成、动作原理等,所以开发设计和研究平面关节型机械手具有最广泛的实际意义和应用前景。其中比较突出的是美国国家半导体公司生产的可编程全数字运动控制芯片,它具有位的位置、速度和加速度寄存器,内置算法,其参数可以修改;支持实时读取和设定速度、加速度以及位置等运动参数,内置的梯形图发生器能够自动生成速度曲线,平稳地加速、减速;支持增量式光电码盘的倍频输入;芯片的主频为和。 一机械手结构 本文设计的平面关节型机械手的实物照片如图所示,其主要包括两个旋转关节(分别控制机械大臂和小臂旋转以及手抓张合)和一个移动关节(控制手腕伸缩),图为机械手简化模型。各关节均采用直流电机作为驱动装置,在机械大臂和小臂的旋转关节上还装配有增量式光电编码器,提供半闭环控制所需的反馈信号。直流电机的运动控制采用自行开发的基于和构成的多关节控制卡,并编制了能满足运动控制要求的软件,实现对机械手的速度、位置以及关节联动控制。由于机械手个关节电机的控制系统基本类似,因此在下文中,笔者将以单个关节电机为例向读者介绍平面关节型机械手的控制系统设计过程。
监控系统说明书
监控系统说明书 软件版本 软件开发商:哈尔滨交研交通工程有限责任公司目录 1软件所必须的前提条件 硬件:最低支持1920*1080分辨率的显示器 操作系统:windows 7及更高 操作系统分辨率:最低1920*1080
分辨率设置:使用前必须设置屏幕分辨率,在桌面空白处右键,选择“屏幕分辨率”,调整分辨率最低为1920*1080或者更高,参考下图。 2启动软件 监控系统默认安装在电脑的D:\ StationMS文件夹,首次运行软件我们需要进入目录,双击运行软件,图标参考下图,软件运行的同时自动在桌面生成快捷方式,下一次只需要在桌面双击即可。 3监控系统界面介绍 软件启动后主界面如下 功能分三部分: 1、实时监控:实时监控车道状态,包括上班状体、车道图片、轴型、线圈、栏 杆、费额等 2、报警处理:处理免费车、改型车、绿色通道等报警 3、系统设置:修改收费站参数 实时监控 点击主界面的实时监控 进入监控界面,界面参考下图 界面左边是车道信息,包括出入口图片,轴型信息,车道收费程序信息和收费员操作记录
中间部位是车道监控信息截图放大如下 这里我们截取了两行,用于方便我们对一些设备状态的对比 首先我们看左边的绿色三角箭头,上面的箭头处于点亮状态,下面是暗淡的,我们用鼠标点击三角箭头,箭头点亮后左边就显示相应车道的信息,截图中的11和31分别表示4道收费11元,6道收费31元。其他图标代表含义如下: 表示雾灯雨棚灯关闭雨棚灯打开 抓拍线圈无车抓拍线圈有车表示2轴吨 栏杆抬起栏杆落下报警倒计时 表示车道最后三条操作记录,截图做为参考,以实际提示为准特殊事件记录 特殊事件记录功能是为了对车流增加事件记录 点击实时监控页面的“显示数据监视”按钮,进入事件记录界面,界面如下图:1、界面左侧是数据监视,选择车道,点击+号展开,可以看到车流信息,车流信息的监控日期可以在中间选择,默认是显示最新的99调,我们也可以选择自定义,设定日期范围 2、右侧是事件记录,右上方用于登记事件,右下方是报警事件
温控器接线图
温控器的接线方法 时间:2009-7-13 9:31:33 来源:互联网【大中小】【打印】 温控器(英:Thermostat 日:サーモスタット)是集成编程器与软件并实现智能化控制温度的开关,可以自由调节室内温度,并能按用户要求设定各种时间段的开关和各种预设好的模式下自动运行调节室温;使之达到舒适的温度。真正达到方便、节能、舒适温暖的理想生活环境.适用于中央空调、单户取暖、地暖及各种燃油、燃气锅炉(壁挂炉)等设备的使用,是理想的温度控制产品及节能产品。 其采用的模糊控制技术如PID控制,P(Proportional)比例+I(Integral)积分+D(Differential)微分控制。 温控器的接线方法: 仔细看温控器上的三个脚,它们都有用英文字母和数字两种方法来代替,分别是:H(6)\L(3)\C(4). H(6)接棕色线,是电源的火线; L(3)接灰色线,是灯的火线; C(4)接白色线,是压缩机的火线。 温控器相关知识温度控制器是对空调房间的温度进行控制的电开关设备。温度控制器所控制的空调房间内的温度范围一般在18℃--28℃。窗式空调常用的温度控制器是以压力作用原理来推动触点的通与断。其结构由波纹管、感温包(测试管)、偏心轮、微动开关等组成一个密封的感应系统和一个转送信号动力的系统。 控制方法一般分为两种;一种是由被冷却对象的温度变化来进行控制,多采用蒸气压力式温度控制器,另一种由被冷却对象的温差变化来进行控制,多采用电子式温度控制器。温控器分为: 机械式分为:蒸气压力式温控器、液体膨胀式温控器、气体吸附式温控器、金属膨胀式温控器。 其中蒸气压力式温控器又分为:充气型、液气混合型和充液型。家用空调机械式都以这类温控器为主。 电子式分为:电阻式温控器和热电偶式温控器。 电路系统的作用: 空调机电路系统的作用是控制空调正常和多功能的运行,保护压缩机和风扇电机正常运行。电路系统的组成部件主要有:温度控制器、热保护器、主控开关、运转电容器,风扇电动机的运转电容器等被固定在控制盒内。左图为单冷式空调机的电气线路图。温度控制器的作用只是控制压缩机的启动和停 冰箱温控器H 为公共脚 L 为接加热丝脚 C为接压缩机和加热丝 脚 H--L为开关路 L--C为制冷路 L、C接反会引起不停机故障有的冰箱L处会接一个节电开关后再接加热丝. 适合南方气候的电冰箱电路图 图1 带温度补偿电冰箱电路图 图2 这种电路照明灯及温度补偿不受温控器开关控制 图3 这种电路温度补偿不受温度控制器开关控制, 图4 电子温度控制电冰箱电路图
S-NVS视频监控系统说明书V1.1
ST-NVS视频监控系统 说 明 书
目录 一、软件概述 (5) 1.1系统要求 (5) 1.2软件安装 (5) 1.3软件卸载 (8) 二、用户登录 (9) 2.1主界面 (9) 2.2基本功能 (9) 2.2.1用户登录 (9) 三、视频预览 (10) 3.1主界面 (10) 3.2基本功能 (11) 3.2.1监控点添加向导 (11) 3.2.1视频浏览 (13) 3.2.2设备管理 (16) 3.2.3语音对讲 (16) 3.2.4打开声音 (17) 3.2.5云台控制 (18) 3.2.6区域放大 (20) 3.2.7轮巡功能 (22) 3.2.8上下屏操作 (23) 3.2.9抓拍/录像功能 (23) 3.2.10分屏及全屏功能 (23) 3.2.11收藏夹 (24) 3.2.12告警事件及时上报 (25) 四、录像回放 (26) 4.1主界面 (26) 4.2基本功能 (26) 4.2.1录像查询 (26) 4.2.2时间轴功能 (27)
4.2.4录像窗口工具栏 (28) 4.2.5回放界面工具栏 (29) 五、图片回放 (29) 5.1主界面 (29) 5.2基本功能 (29) 5.2.1抓拍图片查询 (29) 5.2.2图片搜索类型 (30) 5.2.3图片查看器 (31) 5.2.4分页预览 (31) 六、电视墙 (32) 6.1主界面 (32) 6.2基本功能 (32) 6.2.1电视墙模式分类 (32) 6.2.2模式切换 (34) 6.2.3分屏设置(配置模式) (34) 6.2.4显示通道配置(配置模式) (34) 6.2.5方案备份(配置模式) (35) 6.2.6方案还原(配置模式) (36) 6.2.7清除屏幕(配置模式) (36) 6.2.8屏幕放大(配置模式) (36) 6.2.9视频切换(操作模式) (37) 6.2.10右键菜单功能(操作模式) (37) 6.2.11底部工具栏功能(操作模式) (39) 七、配置管理 (39) 7.1基本功能 (39) 7.1.1设备管理 (39) 7.1.2系统管理 (42) 7.1.3显示管理 (43) 7.1.4用户管理 (43)
监控系统使用说明书
监控系统使用说明书 系统稳定运行的先决条件 保证系统各组成部分----前段摄像机,后端硬盘录像机、监视器有稳定的UPS电源支持,系统后端设备处于通风干燥的无振动环境中。 系统的基本操作指南 开机 插上电源后,设备前面板的【POWER】指示灯如果是“灭”的,请打开设备后面板的电源开关,如果【POWER】指示灯呈“红色”,轻按【POWER】按钮,设备开始启动。预览 设备启动后自动进入预览画面。 使用预览快捷键【预览】可以对预览画面方式(多画面分割)进行快速切换。 使用预览快捷键【预览】可以从菜单操作模式快速切换到预览画面。 操作密码 是否启用操作密码在“本地显示”菜单项内确定(默认:启用,通过前面板【编辑】键切换)。
操作密码允许使用数字键、大写英文字母、小写英文字母,且区分大小写英文字母,口令长度为8位。 操作密码与用户名具有对应关系,设备默认的用户名为“admin”(管理员),默认的操作密码为“12345”。您可以修改该密码,进入“用户管理”菜单项。 当启用口令后,使用【主菜单】快捷键从预览画面切换到菜单操作界面时,会出现输入用户名与密码的提示对话框。 当用户名或密码输入错误,硬盘录像机会产生告警提示音,连续3次输入错误,系统告警并返回预览界面。 【操作提示】 输入用户名或密码时,注意输入法切换键【输入法】、【编辑】除了具有切换“ ”、“×”状态以外,在字符编辑状态下,还能删除光标前的字符。
云台控制 通过前面板【云台控制】键可直接进入云台控制界面。 输入要控制的通道号,出现需要控制的云台、镜头等所在画面,通过“前面板”按键,您可以进行如下控制操作: ●控制云台:通过【方向键】可以对云台进行方向控制。 ●控制镜头:通过【编辑】键、【云台控制】键可以对光圈进行控制;通过【输入法】、【多 画面】键可以对焦距进行控制;通过【系统信息】与【对讲】键可以对镜头进行变焦控制。 【退出】键可以结束调节。 手动录像 通过前面板【录像】键直接进入手动录像操作界面。
视频监控系统的工作原理及演示操作实验报告
视频监控系统的工作原理及演示操作实验报告 学号100694214 姓名陈宇班级物业10-2 一、概述 监控系统是由摄像、传输、控制、显示、记录登记5大部分组成。摄像机通过同轴视频电缆将视频图像传输到控制主机,控制主机再将视频信号分配到各监视器及录像设备,同时可将需要传输的语音信号同步录入到录像机内。通过控制主机,操作人员可发出指令,对云台的上、下、左、右的动作进行控制及对镜头进行调焦变倍的操作,并可通过控制主机实现在多路摄像机及云台之间的切换。利用特殊的录像处理模式,可对图像进行录入、回放、处理等操作,使录像效果达到最佳。 视频监控系统由实时控制系统、监视系统及管理信息系统组成。实时控制系统完成实时数据采集处理、存储、反馈的功能;监视系统完成对各个监控点的全天候的监视,能在多操作控制点上切换多路图像;管理信息系统完成各类所需信息的采集、接收、传输、加工、处理,是整个系统的控制核心。 视频监控系统发展了短短二十几年时间,从19世代80年代模拟监控到火热数字监控再到方兴未艾网络视频监控,发生了翻天覆地变化。在IP技术逐步统一全球今天,我们有必要重新认识视频监控系统发展历史。从技术角度出发,视频监控系统发展划分为第一代模拟视频监控系统(CCTV),到第二代基于“PC+多媒体卡”数字视频监控系统(DVR),到第三代完全基于IP网络视频监控系统(IPVS)。 视频监控系统产品包含光端机,光缆终端盒,云台,云台解码器,视频矩阵,硬盘录像机,监控摄像机。视频监控系统组成部分包括监控前端、管理中心、监控中心、PC客户端及无线网桥。 二、工作原理 对于视频监控系统,根据系统各部分功能的不同,我们将整个视频监控系统划分为七层——表现层、控制层、处理层、传输层、执行层、支撑层、采集层。当然,由于设备集成化越来越高,对于部分系统而言,某些设备可能会同时以多个层的身份存在于系统中。 (1)表现层:表现层是我们最直观感受到的,它展现了整个视频监控系统的品质。如监控电视墙、监视器、高音报警喇叭、报警自动驳接电话等等都属于这一层。
平面关节型机械手设计
设计要求 一、通过设计平面关节型机械手,培养综合运用所学知识,分析问题和解决问题的能力。 有关资料:上下料搬运机械手,3个自由度,平面关节型;需要搬运的工件:环类零件,内孔直径50mm;高150mm,厚10mm,(只能从内孔夹持工件),材料40钢,将工件从一条输送线搬运到与之平行的另一条输送线上,(两输送线距离为2.5m,高度差0.4m)。 要求:设计方案和计算正确,叙述清楚,图纸符合规范。翻译一篇有关外文资料。 二、图纸: 1.机械手机构简图 2.工作空间投影图 3.机械手传动原理图 4.机械手装配图 5.零件图 三、实习: 1.本校机械实验室组装各类机械手模型。 2.学习工业机械人设计方面知识。 四、参考书: 1. 《工业机器人设计》周伯英机械工业出版社 1995 2. 《机器人机械设计》龚振帮电子工业出版社 1995 3. 《机构设计》(日)藤森洋三机械工业出版社 1990 4. 《机械手图册》(日)加藤一郎上海科技出版社 1989 5. 《机械设计图册》(5)成大先化学工业出版社 1999 五、进度: 3月24日到4月25日实习,拟订设计方案 4月264日到5月3日机械手传动原理图 5月4日到5月17日机械手装配图 5月18日到5月24日零件图 5月25日到6月1日写说明书
平面关节型机械手设计 [摘要]平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。关键词:机械手轴承汽缸 [Abstract]Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down . the work room as work room drawing . the vertical section is a rectangle slew . the high of the vertical section is move joints’journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section . Key words:manipulator axletree cylinder 第1章机械手总体设计 工业机械手是一种模仿人手部分动作,按照预先设定的程序,轨迹或其他要求,实现抓取、搬运工件或操作工具的自动化装置。它在二十世纪五十年代就已用于生产,是在自动上下料机构的基础上发展起来的一种机械装置,开始主要用来实现自动上下料和搬运工件,完成单机自动化和生产线自动化,随着应用范围的不段扩大,现在用来夹持工具和完成一定的作业。实践证明它可以代替人手的繁重劳动,减轻工人的劳动强度,改善劳动条件,提高劳动生产率。 平面关节型机器人又称SCARA型装配机器人,是Selective Compliance Assembly Robot Arm的缩写,意思是具有选择柔顺性的装配机器人手臂。在水平方向有柔顺性,在垂直方向有较大的刚性。它结构简单,动作灵活,多用于装配作业中,特别适合小规格零件的插接装配,如在电子工业零件的插接、装配中应用广泛。 总体设计的任务:包括进行机械手的运动设计,确定主要工作参数,选择驱动系统和电控系统,整体结构设计,最后绘出方案草图。
安防监控使用说明书
目录 第1章概述 (3) 第2章运行和使用 (3) 1.用户登录 (3) 2.软件界面及菜单介绍 (4) 第3章实时监控 (6) 第4章录像回放 (7) 1.常规回放 (8) 2.录像检索 (9) 3.分段回放 (10) 第5章大屏客户端 (11) 1.大屏控制 (11) 2.预案管理 (12) 3.回放上墙 (12) 4.报警联动 (13) 5.解码资源 (14) 6.关联解码资源 (15) 7.实时解码 (15) 8.大屏拼接 (16) 9.场景管理 (18) 10.回放解码 (18) 第6章摄像机安装位置及IP明细表 (19) 第7章监控平台设备IP明细表 (22) 第8章平台服务安装配置 (22) 1.运行环境要求 (22) 2.安装软件 (23)
3.验证CMS (29) 4.验证服务软件 (29) 5.验证客户端 (30) 第9章配置服务 (30) 1.登录平台 (30) 2.配置流程 (32)
第1章概述 集中监控管理系统主要应用于监控中心、值班室等场合,具备实时视频监控、摄像机云台控制、录像检索回放、录像备份下载等基础功能,其中客户端还具备接收和处理报警、辅屏预览、控制解码器上电视墙等应用。 第2章运行和使用 1.用户登录 第一步:双击桌面客户端图标,显示如下登录框。 第二步:输入用户名、密码、中心服务器IP地址与端口等相关信息。默认情况下:用户名:密码端口为.
第三步:点击《确定》。勾选《记住密码》,保存本次输入的用户名和密码。 2.软件界面及菜单介绍 软件主界面分7个部分,如下图所示:
●系统功能键:键入监控视图、录像回放 ●监控组织树:组织资源机构管理。显示整个系统的组织,区域和通道,通过 搜索框可以进行通道摄像机的搜索。 ●控制面板:提供视频播放时的图像控制,包括云台控制,预置点设置和调用, 巡航设置和调用、轨迹记录和调用,视频参数调节等。 ●报警信息菜单:显示客户端接收到的报警信息,对报警信息确认处理等操作。 ●系统信息:显示CPU占用率,内存占用率信息。 播放面板:
机械手的设计
1 前言 1.1 国内外发展概况]1[ 机械手首先是美国开始研制的。1958年美国联合控制公司研制出第一台机械手。它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教型的。 1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年该公司和普鲁曼公司合并成立万能自动公司,专门生产工业机械手。 1962年美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。 1978年美国Unimate公司和斯坦福大学,麻省理工学院研究Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国机械制造业是从1970年开始应用机械手,主要用于喷涂、起重运输、焊接和设备的上下料等作业。 联邦德国KnKa公司还生产一种喷涂机械手,采用关节式结构和程序控制。 日本是机械手发展最快、应用最多的国家。自1969年从美国引进两种机械手后大力从事机械手的研究。 前苏联自六十年代开始发展和应用机械手,至1977年底,其中一半是国产,一半是进口。 目前,工业机械手大部分还属于第一代,主要依靠工人进行控制;改进的方向主要是降低成本和提高精度。 第二代机械手正在加紧研制。它设有微型电子计算控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把感觉到的信息反馈,是机械手具有感觉机能。
监控系统设备使用说明书
监控设备、网络设备使用说明及注意事项
iVMS-5000集中监控管理系统使用说明 1.1 简介 iVMS-5000 集中监控管理系统拥有B/S 客户端和C/S 客户端,主要应用于监控中心、值班室、接警室、指挥调度室等场合,具备实时视频监控、摄像机云台控制、录像检索回放、录像备份下载等基础功能, 其中C/S 客户端还具备接收和处理报警,语音对讲和广播,辅屏预览,控制解码上电视墙等高级应用。运行和使用 用户登录 第一步:双击桌面客户端图标显 示如下登录框。
第二步:输入用户名、密码、中心服务器IP 地址与端口等相关信息。默认情况下:用户名为你好,密码为123456789,端口为80。第三步:点击“确定”。 勾选“自动登录”,保存本次输入的用户名和密码,下次监控软件启动时,将自动登录。 系统信息:显示CPU 占用率,内存占用率信息。点击可查看当前用户、磁盘剩余空间和系统音量。(备注) 1.2实时监控 点击标签栏标签,进入监控软件播放界面初次启动时,播放面板以2×2播放窗口显示,可通过画面分割按键进行窗口分割的选择
实时视频播放 双击区域节点,则在当前画面分割模式下开 始依次播放该区域的通道图像。 拖动播放。 拖动通道节点到需要的播放窗口,则该窗口显示拖动的通道节点的实时视频。 若拖动的为区域节点,则在当前画面分割模式下从当前选中的播放窗口开始依次播放该区域下的通道。 右键画面停止播放右键点击处于实时播放的播放窗口,显示播放窗口菜单。选择“关闭”项,可以结束该窗口的实时播放。 1.3常规回放
选择“常规回放”进入常规回放界面。 录像检索 软件支持最多16 路回放。回放操作步骤如下: 第一步:选择画面分割方式。软件支持1/4/9 画面分割回放。 第二步:设置回放监控点和回放窗口的对应关系。 说明:选中一个回放窗口,双击希望在该窗口回放的监控点,即可回放当天录像。 第三步:设定搜索条件。 设置所搜的起止时间和录像类型。 点击时间框日历菜单,可以通过点击选择日期。也可以手动输入起始时间。第四步:双击需要回放的监控点,开始回放。 如果存在符合条件的录像文件,将以录像类型对应的颜色显示在时间轴上。 点击,可以对时间轴放大缩小,方便录像文件的时间定位。
视频监控系统原理及应用
视频监控系统原理 一、视频监控系统的定义 监控系统是由摄像、传输、控制、显示、记录登记5大部分组成。摄像机通过同轴视频电缆将视频图像传输到控制主机,控制主机再将视频信号分配到各监视器及录像设备,同时可将需要传输的语音信号同步录入到录像机内。通过控制主机,操作人员可发出指令,对云台的上、下、左、右的动作进行控制及对镜头进行调焦变倍的操作,并可通过控制主机实现在多路摄像机及云台之间的切换。利用特殊的录像处理模式,可对图像进行录入、回放、处理等操作,使录像效果达到最佳。视频监控系统有多画面的监控效果,也有特定的电视墙显示模式。 二、视频监控系统工作原理 对于视频监控系统,根据系统各部分功能的不同,我们将整个视频监控系统划分为七层——表现层、控制层、处理层、传输层、执行层、支撑层、采集层。当然,由于设备集成化越来越高,对于部分系统而言,某些设备可能会同时以多个层的身份存在于系统中。
(一)表现层表现层是我们最直观感受到的,它展现了整个视频监控系统的品质。如监控电视墙、监视器、高音报警喇叭、报警自动驳接电话等等都属于这一层。 (二)控制层控制层是整个视频监控系统的核心,它是系统科技水平的最明确体现。通常我们的控制方式有两种——模拟控制和数字控制。模拟控制是早期的控制方式,其控制台通常由控制器或者模拟控制矩阵构成,适用于小型局部视频监控系统,这种控制方式成本较低,故障率较小。但对于中大型视频监控系统而言,这种方式就显得操作复杂且无任何价格优势了,这时我们更为明智的选择应该是数字控制。数字控制是将工控计算机作为监控系统的控制核心,它将复杂的模拟控制操作变为简单的鼠标点击操作,将巨大的模拟控制器堆叠缩小为一个工控计算机,将复杂而数量庞大的控制电缆变为一根串行电话线。它将中远程监控变为事实、为Internet远程监控提供可能。但数字控制也不是那么十全十美,控制主机的价格十分昂贵、模块浪费的情况、系统可能出现全线崩溃的危机、控制较为滞后等等问题仍然存在。 (三)处理层处理层或许该称为音视频处理层,它将有传输层送过来的音视频信号加以分配、放大、分割等等处理,有机的将表现层与控制层加以连接。音视频分配器、音视频放大器、视频分割器、音视频切换器等等设备都属于这一层。 (四)传输层传输层相当于视频监控系统的血脉。在小型视频监控系统中,我们最常见的传输层设备是视频线、音频线,对于中远程监控系统而言,我们常使用的是射频线、微波,对于远程监控而言,我们通常使用Internet这一廉价载体。值得一提的是,新出现的传输层介质——网线/光纤。大多数人在数字安防监控上存在一个误区,他们认为控制层使用的数字控制的视频监控系统就是数字视频监控系统了,其实不然。纯数字视频监控系统的传输介质一定是网线或光纤。信号从采集层出来时,就已经调制成数字信号了,数字信号在目前已趋成熟的网络上跑,理论上是无衰减的,这就保证远程监控图像的无损失显示,这是模拟传输无法比拟的。当然,高性能的回报也需要高成本的投入,这是纯数字视频监控系统无法普及最重要的原因之一。
烟气在线监控设备说明书
第一章TH890系统简介 一概述 宇虹TH-890烟气连续排放监测系统(简称TH-890 CEMS)是我公司生产的环境监测仪器。该系统运用先进的烟气成份分析技术、自动控制技术以及计算机数据处理和网络通讯技术,实现了污染源大气污染物排放浓度及排放总量的连续监测,为各级环保部门实行污染物排放总量控制和收费提供了科学的依据。 TH-890 CEMS完全符合国家环保总局发布的《固定污染源排放烟气连续监测系统技术条件》中提出的各项标准。该系统由颗粒物CEMS、气态污染物CEMS、烟气参数测量子系统及数据采集与处理系统四部份组成。能连续监测污染源排放的SO2、NO、烟尘等主要污染物的排放浓度、折算排放浓度、排放量及其它烟气参数,并能通过多种传输方式将测量数据、有关参数传送到企业中控室和环境保护管理部门。TH-890 CEMS采用热管抽气法测量烟气中气态污染物,气路结构简单。主要设备放置在控制室内,使用环境较好,维修方便。该系统测量精度高,可靠性强,可广泛用于各行业污染源连续排放监测。 二主要功能 TH-890 CEMS主要功能是实时监测固定污染源中的SO2、NO、烟尘的排放浓度、折算排放浓度、排放量及其它有关参数,并能够将测量数据、测量参数传送到企业中控室和环保管理部门。 1.污染物排放浓度测量 ●采用非分散红外技术测量烟气中的SO2、NO ●采用透光度或黑度测量烟气中固态污染物浓度 2.烟气参数测量 ●采用电化学法测量烟气中的含氧量 ●采用皮托管和差压变送器测量烟气流速 ●采用压力变送器测量烟气压力 ●采用温度变送器测量烟气温度 3.数据采集和处理 ●用一台工业一体化工作站及研华ADAM5000分散式数据采集模块,实现数据采集和处理●实时显示烟气污染物排放浓度、折算排放浓度、排放量以及烟气含氧量、流速、温度、 压力 ●能存储三年的原始数据及经二次计算的数据 ●能将测量数据和参数生成数据报告、参数报告 ●能诊断仪器状态并给出状态标记 ●具有二级操作管理权限和安全管理 ●具有异常情况自恢复功能 ●具有历史数据查询功能,将采集数据以日报表、月报表、年报表形式陈列,并附曲线图●能每10s获得一个累计平均值,显示和打印1min、15min的测试数据,生成日报表、月 报表,给出最大值、最小值、平均值 ● 4.校准及反吹 ●能对SO2、NO、O2分析仪手动校零、校标
平面关节型机械手设计毕业设计论文 精品
江苏城市职业学院 毕业设计(论文) (2011 届) 设计(论文)题目平面关节型机械手设计 办学点(系)张家港办学点(工程系) 专业机械设计与制造 班级11机械(普) 学号110404350532 学生姓名邵强 指导教师杜微娜职称助教
摘要 (3) 一、概论 (4) 1、机械手的工作原理及设计思想 (4) 2、机械手应用及应用中容易出现的误区 (5) 3、机械手的发展及发展前景 (6) 二、机械手的总体设计 (7) 三、手指设计 (9) 1、设计时应注意的问题 (10) 2、零件的计算 (10) 3、手指夹紧力的计算 (11) 四、移动关节的设计计算 (12) 1、驱动方式的比较 (12) 2、汽缸的设计 (13) 五、小臂的设计 (14) 1、结构的设计 (14) 2、轴的设计计算 (15) 3、轴承摩擦力矩的计算 (15) 4、驱动的选择 (16) 六、大臂的设计 (16) 1、结构的设计 (17) 2、轴的设计计算 (17) 3、轴承摩擦力矩的计算 (18) 4、伺服系统的选择 (18) 七、机身的设计 (17) 1、设计时应注意的问题 (17) 2、设计的效果说明 (18) 结论 (20) 致谢 (21) 参考文献 (22)
平面关节型机械手设计 [摘要] 平面关节型机械手采用两个回转关节和一个移动关节;两个回转关节控制前后左 右运动,而移动关节则实现上下运动,其工作空间如工作空间图,它的纵截面为矩形的回转体,纵截面高为移动关节的行程长,两回转关节转角的大小决定回转体截面的大小、形状。 关键词: 机械手轴承汽缸 [Abstract] Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control t he moving of up and down . the work room as work room drawing . the vertical section is a rectangle slew . the hi gh of the vertical section is move joints’ journey ,the move angle of the two slew joints decide the big and small and figure of the vertical section . Key words: manipulator axletree cylinder
监控系统使用说明书
监控系统用户操作说明
监控系统用户操作说明 一、监控系统概述 1、监控系统原理图: 2、监控系统设备说明: 电视墙(彩色监视器) 彩色监视器是视频摄像显示设备之一,主要为了方便监控,易于观察。 本设备与矩阵控制器连接。使用前应确认监视器是否连接电源、与矩阵连 接视频线。开启关闭设备,应先关闭监视器电源,再关闭供电插座电源。 具体操作使用,详见附件1-彩色监控器使用手册。 附件1:彩色监控器使用说明书 3、彩色摄像机设备说明:
彩色摄像机全称是半球彩色摄像机,它起到室内监控设备的摄像功能。 彩色半球摄像机接线有2根,一根是本身的视频线,另外一根为电源线。 视频线采用BNC接头于彩色摄像机、食品分配器连接。电源线采用220V 电源供电。设备本身只能固定在吊顶天花板上,不能自动移动,而本监控设备需要24V支流电源供电,采用一对一的变压器供电,220V电源由监控室内双电源配电箱供应。如出现监控器不能采集数据,可更换摄像机保证系统正常运行。 使用注意事项: a)本设备为精密光学电子设备,除正确安装使用外,保护保养工作尤其 重要。 b)注意使用时电源电压,切勿插入高压,否则会烧坏设备。 c)透明球罩应保持清洁,如有灰尘或赃物,应用脱脂棉沾少许中性清洗 剂轻轻擦拭,球罩不得接触硬物或用粗布擦拭,以免影响设想功能。 d)因摄像头镜面采用光学镀膜,严禁用手触摸或擦拭摄像头镜面。以免 破坏光学性能。 4、室外云台: 室外云台是室外使用的摄像设备,因为使用云台防护罩,可以防雨雪、防尘、防冰雹。并在云台上方设置夜间照射卤化灯。可以全天候使用。云台可以全方位旋转录像,也可进行远近的调焦功能。云台连接线有3种,首先是视频信号线,视频线两端用BNC接头把云台与视频分配器连接。 其次是电源线,220V电源。实际云台同样采用24V直流电源供电,但是变压器在其内部已经安装。 使用注意事项: a)云台机芯水平转动不得超过356度,否则会导致内接线缠绕引起故障。 b)请不要将云台长时间处于自动工作状态。 c)请不要擅自拆卸云台内部各个零件,有关事宜需和厂家联系。 d)其他注意事项与半球彩色摄像机相同。 5、视频分配器:
怎么快速看懂温控仪的接线图
怎么快速看懂温控仪的接线图?二线三线的温度 传感器怎么接线? 今天我们要谈谈恒温器的线路。 许多型号的温度控制器,输出方式略有不同,但接线原理是一样的,只要了解其工作原理,任何一个温度控制器都可以直接接线。电源的主电路通过交流接触器的主触头直接连接到加热装置。 温度传感器此时感知温度低于设定值,加热装置开始工作,当温度达到设定值时,总低开度变为总高导通,接触器线圈失去电触点复位,加热停止温度逐渐降低,当温度低于设定值时,变为总低导通,加热开始循环。有一个温度“反弹”和大多数恒温器可以设置温度“反弹”范围。不同牌号
的温度控制器参数和设置略有不同,接线方法要按规格和接线图上的温度控制器。 温度控制器温度控制器上最重要的三组触点:电源触点、高低组继电器输出触点、温度传感器触点。如上图所示,消防线的零线相位、总公用端、总高度通常是封闭的,总低度通常是开放的。这些继电器的输出是无源的,需要外部电源才能使用。 123连接到温度传感器上,常见的两线热电偶,一般红线为正极,蓝线为负极,正极和负极不误。 有三线热电阻,两线颜色相同,接线顺序不一致,第三线进入正极端子,两线相同的连接在输入负极和负极外接电源上即可。(使用两条相同颜色的线来消除线电阻对测量值的影响。)物理接
线以上是物理参考图,是最常用的接线方法。按下启动按钮,接触器自锁电热管启动加热,加热到设定温度,断开总和低,接触器断电,加热管停止。 温度控制器接线图一些温度控制器在接点上可能更多,我们以上图为例
13和14电源,12地线(一些内部悬挂不能连接)。铝标可以连接到报警装置,123连接到温度传感器,6和7相应的 ssr,一组直流信号输出,我们可以用来控制继电器,布线注意正负极。