非独立悬架轻型客车操纵稳定性仿真分析(一)
万方数据
陶利民等:非独立悬架轻型客车操纵稳定性仿真分析
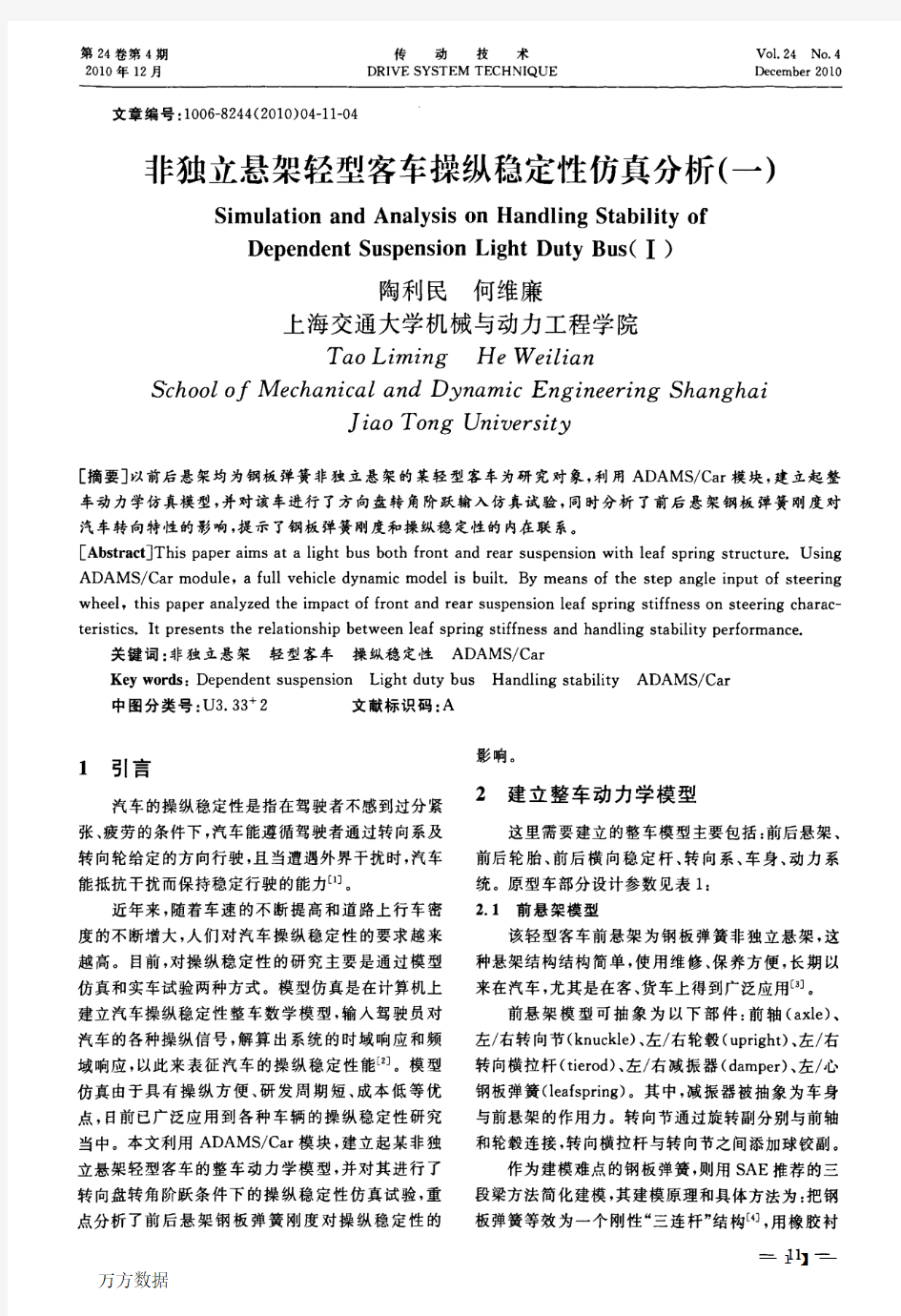
套把三段梁连接起来,然后在中间梁与轴连接处添加固定副,在前后梁与车架连接处同样用衬套连接,以此模型钢板弹簧最典则的工作状况。其中,前卷耳与车身连接处、后卷耳与吊耳连接处、吊耳与车身连接处这三处的弹性衬套参数应根据实际衬套参数编制。至于前梁和中梁、中粱和后梁之间的两个弹性衬套属性文件根据钢板弹簧刚度需要编制。建立好的前悬架模型如图1所示:
表1原型车部分设计参数
Table1
满载总质量(Kg)
5550Fullloadweight
满载前/后轴荷分配(Kg)
Beforefullload/behindshaftloaddistribu-2700/2850
tion
轴距(ram)
3935
Centerdistance
前/后轮距(ram)
1690/1670
Front/behindwheeldistance
满载质心高度(ram)
980Fullloadeentroidalheight
前板簧刚度(N/mm)
109.8Frontleafspringstiffness
后板簧刚度(N/mm)
127.2Behindleafspringsliffness
转向器形式齿轮齿条式
SteeringgearformGearrack
轮胎规格
7.00R16LTTyrespecifications
最高车速(km/h)
130
Max.speed
图1前悬架模型
Fig.1Thefrontsuspensionmodel
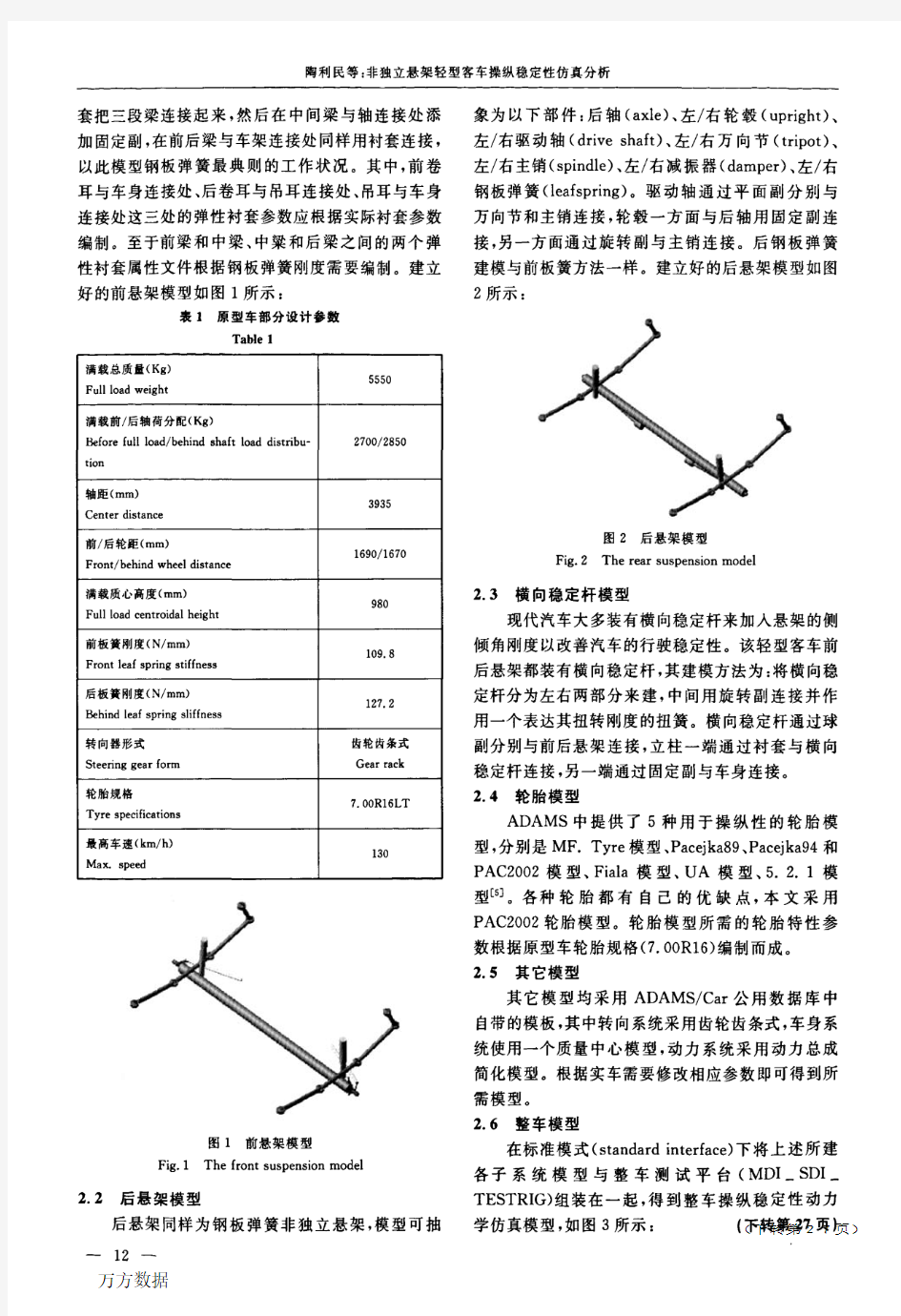
2.2后悬架模型
后悬架同样为钢板弹簧非独立悬架,模型可抽一12一象为以下部件:后轴(axle)、左/右轮毂(upright)、左/右驱动轴(driveshaft)、左/右万向节(tripot)、左/右主销(spindle)、左/右减振器(damper)、左/右钢板弹簧(1eafspring)。驱动轴通过平面副分别与万向节和主销连接,轮毂一方面与后轴用固定副连接,另一方面通过旋转副与主销连接。后钢板弹簧建模与前板簧方法一样。建立好的后悬架模型如图2所示:
图2后悬架模型
Fig.2Therearsuspensionmodel
2.3横向稳定杆模型
现代汽车大多装有横向稳定杆来加入悬架的侧倾角刚度以改善汽车的行驶稳定性。该轻型客车前后悬架都装有横向稳定杆,其建模方法为:将横向稳定杆分为左右两部分来建,中间用旋转副连接并作用一个表达其扭转刚度的扭簧。横向稳定杆通过球副分别与前后悬架连接,立柱一端通过衬套与横向稳定杆连接,另一端通过固定副与车身连接。
2.4轮胎模型
ADAMS中提供了5种用于操纵性的轮胎模型,分别是MF.Tyre模型、Pacejka89、Pacejka94和PAC2002模型、Fiala模型、UA模型、5.2.1模型[5]。各种轮胎都有自己的优缺点,本文采用PAC2002轮胎模型。轮胎模型所需的轮胎特性参数根据原型车轮胎规格(7.00R16)编制而成。
2.5其它模型
其它模型均采用ADAMS/Car公用数据库中自带的模板,其中转向系统采用齿轮齿条式,车身系统使用一个质量中心模型,动力系统采用动力总成简化模型。根据实车需要修改相应参数即可得到所需模型。
2.6整车模型
在标准模式(standardinterface)下将上述所建各子系统模型与整车测试平台(MDI—SDI—TESTRIG)组装在一起,得到整车操纵稳定性动力学仿真模型,如图3所示:
(下转第27页)万方数据
张枫念:调用伽玛函数实现变厚齿强度的概率可靠性调优计算(二)
裹7可靠度R=0.9999965的几种安全系数
当安全系数1.9927<(nR、万7。、n095)<1.99287的变异系数的修正系数
Table7SeveralsafetyfactorofreliabilityR=0.999965Duringcorrectionfactorofthefreakfactorofthesafetyfactor1.9927{nj、席7R、no.,5)<1.99287
CCxzx(i)xzy(inR以Rtt0950.12367850.12339771.357811.992732
0.1435584O.12339771.5760511.992863
0.14309380.11105791.57095O.91.9927811.9927380.14122850.0792461.5504720.64221.992766
O.1157357O.12339771.27061
注:G应力变异系数,G强度变异系数,xzx(i)应力变异系数修正系数,zzy(i)强度变异系数修正系数,rlR=n12最大应力与强度均值的安全系数,n'R=n34最小强度与最大应力的安全系数,no”=nss较大应力与强度均值的安全系数。
另外应力变异系数的修正系数xzx(i)和强度变异
系数的修正系数zzy(i)在计算中影响作用大小也[2]
是不相同的。
[3]
[4]参考’文献
[13徐士良编著.QBASIC常用算法程序集.北京;清华大学[5]
出版社,1997.
芮延年.现代可靠性设计.北京:国防工业出版社,2007.
冯国胜.车辆现代设计方法.北京:科学出版社,2006.
张枫念.对汽车转向器变厚齿的研究[J].上海:传动技术,2001(4).
张枫念.实用机械设计编程及实例VisualBasic6.0程序
设计.北京:化学工业出版社,2007.
(上接第12页)
表2原型车轮胎(7.00R16)的特性参数
Table2
参数名称数值轮胎自由半径
0.385Unloaded_radius(m)
轮胎断面宽度
O.180Width(m)
扁平率
1.03Aspect_ratio
轮辋半径
0.200Rim_radius(m)
轮辋宽度
0.147Rim_width(m)
纵向刚度系数
1.75e+005
VerticaLstiffness(N/m)
纵向阻尼系数
50
Vertical—damping(Nms/m)
Breff7
Dreff0.25
Freff0.01
轮胎载荷
3800
Fnomin(kg)
3转向盘转角阶跃输入仿真试验
角阶跃输入试验是为了测定汽车对转向盘转角
仓
o
3
o
面
二
《
躲
图3整车操纵稳定性模型
Fig.3Thefullvehiclemodelofhandingstability
图4方向盘转角
Fig.4Thesteeringwheelangle
输入时的瞬态响应,是汽车瞬态闭环响应特性的一种重要试验方法,可以综合评价汽车行驶稳定性及乘坐舒适性。该试验在一定程度上表现出汽车转向运动的综合性能。(下接2011.No.1)
~27—
万方数据
非独立悬架轻型客车操纵稳定性仿真分析(一)
作者:陶利民, 何维廉, Tao Liming, He Weilian
作者单位:上海交通大学机械与动力工程学院
刊名:
传动技术
英文刊名:DRIVE SYSTEM TECHNIQUE
年,卷(期):2010,24(4)
本文链接:https://www.360docs.net/doc/fc2743920.html,/Periodical_cdjs201004002.aspx
汽车操纵稳定性
关键词:汽车操纵稳定性 1、蔡世芳(1985). "汽车操纵稳定性评价指标和参数匹配的工程分析方法." 汽车工程7(3): 21-29. 本文提出一种工程分析方法,并利用此方法研究评价指标和参数匹配规律。全文主要内容有四部份: (1)工程分析方法的数学模型; (2)评价指标的工程计算方法; (8)评价指标的相关分析和主要评价指标的推荐。(4)操纵稳定性参数匹配的基本规律。 2、岑少起, 潘筱, et al. (2006). "ADAMS 在汽车操纵稳定性仿真中的应用研究." 郑州大学学报: 工学版27(003): 55-58. 运用ADAMS软件建立了C型车多自由度整车多体动力学仿真模型,详细分析了前悬架系统、后钢板弹簧系统和轮胎模型,同时提出了一种建立钢板弹簧多体模型的新方法——中性面法,并对不同方向盘转角及改变整车质心位置下的操纵稳定性进行了动力学仿真.经过与实际车型性能比较,该模型与分析结果是准确、可靠的,可应用于汽车平顺性研究中. 3、陈克, 王工, et al. (2005). "基于ADAMS 的汽车操纵稳定性虚拟试验演示系统开发." 沈阳理工大学学报24(001): 59-61. 利用ADAMS动力学软件建立了整车多刚体系统模型.分别考虑车型、悬架、轮胎、车速等不同因素对整车操纵稳定性的影响,进行整车操纵稳定性6个性能试验的仿真分析.利用获取的动力学分析数据、仿真动画,实现汽车操纵稳定性虚拟试验演示系统. 4、陈黎卿, 王启瑞, et al. (2005). "基于ADAMS 的双横臂扭杆独立悬架操纵稳定性分析." 合肥工业大学学报: 自然科学版28(004): 341-345. 悬架的主要性能参数在悬架运动过程中的变化规律是影响悬架性能的主要因素。文章采用ADAMS软件建立了某商务车独立悬架的数学模型和仿真模型,分析了该悬架对操纵稳定性的影响,以及悬架主要性能参数的变化规律,为悬架设计奠定了基础。与传统的设计方法相比,这种方法提高了精度和效率。 5、邓亚东, 余路, et al. (2005). "ADAMS 在汽车操纵稳定性仿真分析中的运用." 武汉大学学报: 工学版38(002): 95-98. 利用ADAMS软件建立了某轿车的操纵动力学多体仿真模型,详细考虑了前后悬架系统、转向系统、轮胎以及各种连接件中的弹性衬套的影响,分析了汽车在方向盘转角阶跃输入时的转向特性.通过对不同车速、不同载荷下的仿真计算,得出汽车转向特性在这些条件下的不同表现,揭示了汽车转向特性与车速、载荷和轮胎的内在关系,为汽车操纵稳定性分析提供了参考. 6、董涵(2003). 侧风环境下高速汽车稳定性研究与分析[D], 长沙: 湖南大学. 随着汽车车速的不断提高,汽车侧风稳定性的研究日益重要。由于实车试验风险大、场地设备要求高,而使用计算机仿真则可以极大的的缩短产品开发周期。因而进行高速汽车侧风稳定性计算机仿真研究具有现实意义。在车辆动力学研究过程中,汽车数学模型的精确与否始终是一个关键问题。随着计算机技术的长足进步,以及多体系统动力学这一学科的成熟,汽车模型的自由度越来越多,仿真结果越来越精确。本文首先整理了汽车操纵稳定性的各项评价指标,根据汽车高速运动时的受力分析,使用非线性轮胎模型,建立了侧风环境下汽车运动十八自由度数学模型并进行了直线行驶运动仿真。
汽车操纵稳定性研究方法探讨
汽车操纵稳定性研究方法探讨
汽车操纵稳定性研究方法探讨 1 操纵稳定性的研究历史和概况研究 对汽车操稳性的系统研究, 早在20 世纪3O 年代就已经开始。对车辆控制的重视导致对悬架和转向机构的运动学研究。1925 年平顺性理论初步形成规模。同年, Broulheit 在文章中首次提出侧偏和侧偏角的概念【Broulheit, 1925】。1931 年, Becker、Fromm 和Maruhn 在发表的文章中分析了轮胎在转向系振动中起的作用, 进一步研究了轮胎特性【Becker,1931】。对轮胎的研究使进一步分析车辆稳定性成为可能。 20 世纪50 年代, 建立简单的汽车动力学模型,研究人员开始从事汽车动力学性能仿真, 分析汽车操纵稳定性。19 世纪50 年代中期所作的研究工作为建立汽车数学模型打下基础。对轮胎的基本了解使建立相对精确的轮胎数学模型成为可能。 20 世纪60 年代, 开始从控制理论和振动理论出发, 采用开环系统瞬态响应、系统特性分析和系统稳定性理论设计汽车的总成系统。但是, 应用开环系统分析方法, 仅用于分析汽车的方向稳定性条件, 因为当时不知道如何评价汽车的开环特性和瞬态特性, 很难直接在车辆设计中应用。 到20 世纪70 年代, 安全实验车( ESV)研究计划实施, 促使人们去研究之中实用方法, 用来设计汽车的动力学性能。这个阶段, 各国主要采用系统工程学方法探索汽车动力学性能评价方法。依据大量实验和理论分析, 形成了以驾驶员主观评价为主, 客观评价指标限制为辅的一整套主观评价设计方法。 20 世纪70 年代车辆动力学仿真模型变得更加复杂和真实。这主要归功于计算机技术的发展。以前的仿真工作都在模拟计算机上进行, 它能解决实时动力学问题, 但其致命缺点是不能解决非线性问题。由于数字计算机逐步取代了模拟计算机和混合计算机, 因而必须建立完全数字化的车辆动力学模型。考虑到计算机的费用及计算速度, 建立有效的计算机模型是必要的。 近年来, 随着多体动力学的诞生和发展, 汽车建模方法出现了新的改变。由于
汽车操纵稳定性
第5章汽车的操纵稳定性 学习目标 通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。 汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。一辆操纵性能良好的汽车必须具备以下的能力: (1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。 (2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。 操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。 汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。 节汽车行驶的纵向和横向稳定性 5.1.1 汽车行驶的纵向稳定性 汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。当道路坡度大到一定程度时,前轮的地面法向反作用力为零。在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。这两种情况均使汽车的行驶稳定性遭到破坏。 图汽车上坡时的受力图 图为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力 w F可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力0 = j F,加速阻力矩0 = j M,而车轮的滚动阻力矩 f M的数值相对来说比较小,可不计入。 分别对前轮着地点及后轮着地点取力矩,经整理后可得 ? ? ? ?? ? ? = + - = - - sin cos sin cos 2 1 L G h aG Z L G h bG Z g g α α α α () 当前轮的径向反作用力0 1 = Z时,即汽车上陡坡时发生绕后轴翻车的情况,由式可得
汽车理论课后习题答案 第五章 汽车的操纵稳定性
第 五 章 5.1一轿车(每个)前轮胎的侧偏刚度为-50176N /rad 、外倾刚度为-7665N /rad 。若轿车向左转弯,将使两前轮均产生正的外倾角,其大小为40。设侧偏刚度与外倾刚度均不受左、右轮载荷转移的影响.试求由外倾角引起的前轮侧偏角。 答: 由题意:F Y =k α+k γγ=0 故由外倾角引起的前轮侧偏角: α=- k γγ/k=-7665?4/-50176=0.6110 5.2 6450轻型客车在试验中发现过多转向和中性转向现象,工程师们在前悬架上加装前横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。试分析其理论根据(要求有必要的公式和曲线)。 答: 稳定性系数:??? ? ??-=122k b k a L m K 1k 、2k 变化, 原来K ≤0,现在K>0,即变为不足转向。 5.3汽车的稳态响应有哪几种类型?表征稳态响应的具体参数有哪些?它们彼此之间的关系如何(要求有必要的公式和曲线)? 答: 汽车稳态响应有三种类型 :中性转向、不足转向、过多转向。 几个表征稳态转向的参数: 1.前后轮侧偏角绝对值之差(α1-α2); 2. 转向半径的比R/R 0;
3.静态储备系数S.M. 彼此之间的关系见参考书公式(5-13)(5-16)(5-17)。 5.4举出三种表示汽车稳态转向特性的方法,并说明汽车重心前后位置和内、外轮负荷转移如何影响稳态转向特性? 答:方法: 1.α1-α2 >0时为不足转向,α1-α2 =0时 为中性转向,α1-α2 <0时为过多转向; 2. R/R0>1时为不足转向,R/R0=1时为中性转向, R/R0<1时为过多转向; 3 .S.M.>0时为不足转向,S.M.=0时为中性转向, S.M.<0时为过多转向。 汽车重心前后位置和内、外轮负荷转移使得汽车质心至前后轴距离a、b发生变化,K也发生变化。 5.5汽车转弯时车轮行驶阻力是否与直线行驶时一样? 答:否,因转弯时车轮受到的侧偏力,轮胎产生侧偏现象,行驶阻力不一样。 5.6主销内倾角和后倾角的功能有何不同? 答:主销外倾角可以产生回正力矩,保证汽车直线行驶;主销内倾角除产生回正力矩外,还有使得转向轻便的功能。 5.7横向稳定杆起什么作用?为什么有的车装在前恳架,有的装在后悬架,有的前后都装? 答:横向稳定杆用以提高悬架的侧倾角刚度。
汽车操纵稳定性研究方法探讨
汽车操纵稳定性研究方法探讨 刘进伟1,徐达1,吴志新2 1.武汉理工大学汽车学院车辆工程系,湖北武汉 430070 2.天津清源电动车辆有限公司,天津 300457 liujinweixiaodao@https://www.360docs.net/doc/fc2743920.html, 摘要:本文综述了操稳性研究和评价的历史、现状和存在的问题,着重介绍了客观评价、主观评价、人一车闭环系统综合评价等几种评价方法,以及基于汽车一驾驶员一环境(道路)闭环系统、模糊逻辑控等几种研究方法。提出了操稳性研究的发展趋势,这对全面了解汽车操纵稳定性问题具有指导和借鉴的作用。 关键词:操纵稳定性,历史,研究方法,评价,发展趋势 1操纵稳定性的研究历史和概况 对汽车操稳性的系统研究,早在20世纪3O年代就已经开始。对车辆控制的重视导致对悬架和转向机构的运动学研究。1925 年平顺性理论初步形成规模。同年,Broulheit 在文章中首次提出侧偏和侧偏角的概念【Broulheit, 1925】。1931 年,Becker、Fromm 和 Maruhn 在发表的文章中分析了轮胎在转向系振动中起的作用,进一步研究了轮胎特性【Becker,1931】。对轮胎的研究使进一步分析车辆稳定性成为可能[1]。 20世纪50年代,建立简单的汽车动力学模型,研究人员开始从事汽车动力学性能仿真,分析汽车操纵稳定性。19 世纪 50 年代中期所作的研究工作为建立汽车数学模型打下基础。对轮胎的基本了解使建立相对精确的轮胎数学模型成为可能。 20世纪60年代,开始从控制理论和振动理论出发,采用开环系统瞬态响应、系统特性分析和系统稳定性理论设计汽车的总成系统[2]。但是,应用开环系统分析方法,仅用于分析汽车的方向稳定性条件,因为当时不知道如何评价汽车的开环特性和瞬态特性,很难直接在车辆设计中应用。 到20世纪70年代,安全实验车(ESV)研究计划实施,促使人们去研究之中实用方法,用来设计汽车的动力学性能。这个阶段,各国主要采用系统工程学方法探索汽车动力学性能评价方法。依据大量实验和理论分析,形成了以驾驶员主观评价为主,客观评价指标限制为辅的一整套主观评价设计方法[2]。20 世纪70年代车辆动力学仿真模型变得更加复杂和真实。这主要归功于计算机技术的发展。以前的仿真工作都在模拟计算机上进行,它能解决实时动力学问题,但其致命缺点是不能解决非线性问题。由于数字计算机逐步取代了模拟计算机和混合计算机,因而必须建立完全数字化的车辆动力学模型。考虑到计算机的费用及计算速度,建立有效的计算机模型是必要的。 - 1 -
奔驰ML350 空气悬架系统常见故障
奔驰ML350 空气悬架系统常见故障 引言:一辆奔驰ML350,用户反映该车仪表板灯光系统报警,中央控制面板的悬架升高按键上的LED 灯不停闪烁。 故障1 悬架升高按键上的LED 灯不停闪烁 一辆奔驰ML350,用户反映该车仪表板灯光系统报警,中央控制面板的悬架升高按键上的LED 灯不停闪烁。 连接故障诊断仪对空气悬架系统进行检测,发现了故障含义为加注中央蓄压器的时间异常的故障码。利用故障诊断仪的驱动功能为中央蓄压器充气,发现控制单元的指令可以发出但充气泵不工作。根据驱动测试结果可以判定,既有可能是线路问题,也有可能是元件问题。先检查了充气泵的电源线,结果无电压。对照电路图进行线路检查发现,提供电源的40 A 熔丝已经熔断。但检查充气泵及线路无短路现象,于是更换熔断的熔丝试车。但进行试车后故障依旧。
中央分配阀 限压阀
充气泵 根据以上检查结果,可以确定充气泵损坏。在更换新的充气泵后悬架系统升降功能恢复,升降开关上的LED 灯在车辆悬架达到预定高度后LED 灯熄灭,故障排除。 故障2 空气悬架不能升降 一辆奔驰ML350 轿车,用户反映该车的空气悬架不能升降。 连接故障故障诊断仪对系统进行检测,发现了故障内容为充气时间异常、管路泄漏的故障码。我们先对充气泵的线路进行了检查,没有发现异常。既然线路没有问题,那么很有可能是空气悬架系统存在泄漏的问题。于是对管路及分配阀进行测漏,结果发现分配阀处有泄漏现象。那么会不会这就是故障点呢?因为一旦分配阀出现泄漏,将使得充气泵产生的高压空气从此处泄漏,这样进入空气悬架系统的高压空气量将减少,因此空气悬架在规定的时间内将无法达到设定的高度,此时按键上的LED灯便会持续闪烁。由于充气泵的工作时间超长,最终还会导致线路过载烧毁熔丝。 在更换中央分配阀后,故障排除。
整车操纵稳定性仿真分析报告分析解析
L11整车操纵稳定性仿真分析报告 (HB11A/HB12A 编制(日期)____________________________ 校对(日期)____________________________ 审核(日期)____________________________ 批准(日期)____________________________ 简式国际汽车设计(北京)有限公司 L11整车操纵稳定性仿真分析报告(HB11A/HB12A 1.定半径稳态圆周试验 1.1试验方法 HB11A处于满载状态,沿半径为 40m的定半径圆周进行回转运动,开始以最低稳定速度进入圆周,找准方向盘的位置,使汽车可以沿圆周进行回转运动,开始记录,然后缓慢连续而均匀地加速(纵向加速度不超过0.2 m/s2),加速的同时调整方向盘转角以维持定半径圆周运动,这个过程中车辆不应超岀车道0.5 m,直至不 能维持稳态定半径圆周运动条件时或受发动机功率限制所能达到的最大侧向加速度为止。记录整个过程,建议使用满足试验条件的最高档位。试验按向左转和向右转两个方向进行,每次试验开始时车身应处于正中位置。 1.2数据处理 “方向盘转角一一侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为0.25g时的曲线斜率。 图1方向盘转角一侧向加速度(左转) 从图1计算得到左转不足转向梯度为137o/g 图2方向盘转角一侧向加速度(右转) 右转不足转向梯度为 134.5o/g,则HB11A平均不足转向梯度为 135.75o/g。 HB11A的角传动比约为 23.333,则不足转向梯度/转向系角传动比为 5.817o/g。 “质心侧偏角一一侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为0.25g时的曲线斜率。 图3质心侧偏角——侧向加速度(左转)左转侧偏角梯度为 5.987 o/g。 图4 质心侧偏角一一侧向加速度(右转) 右转侧偏角梯度为 5.987o/g,则HB11A平均侧偏角梯度为 5.987o/g。 “车身侧倾角一一侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为0.25g时的曲线斜率。
模态分析有限元仿真分析学习心得
有限元仿真分析学习心得 1 有限元分析方法原理 有限元分析(FEA,Finite Element Analysis)利用数学近似的方法对真实物理系统(几何和载荷工况)进行模拟。还利用简单而又相互作用的元素,即单元,就可以用有限数量的未知量去逼近无限未知量的真实系统。 有限元法是随着电子计算机发展而迅速发展起来的一种工程力学问题的数值求解方法。20世纪50年代初,它首先应用于连续体力学领域—飞机结构静、动态特性分析之中,用以求得结构的变形、应力、固有频率以及阵型。由于其方法的有效性,迅速被推广应用于机械结构分析中。随着电子计算机的发展,有限元法从固体力学领域扩展到流体力学、传热学、电磁学、生物工程学、声学等。 随着计算机科学与应用技术的发展,有限元理论日益完善,随之涌现了一大批通用和专业的有限元计算软件。其中,通用有限元软件以ANSYS,MSC公司旗下系列软件为杰出代表,专业软件以ABAQUS、LS-DYNA、Fluent、ADAMS 为代表。 ANSYS作为最著名通用和有效的商用有限元软件之一,集机构、传热、流体、电磁、碰撞爆破分析于一体,具有强大的前后处理及计算分析能力,能够进行多场耦合,结构-热、流体-结构、电-磁场的耦合处理求解等。 有限元分析一般由以下基本步骤组成: ①建立求解域,并将之离散化成有限个单元,即将问题分解成单元和节点; ②假定描述单元物理属性的形(shape)函数,即用一个近似的连续函数描述每个单元的解; ③建立单元刚度方程; ④组装单元,构造总刚度矩阵; ⑤应用边界条件和初值条件,施加载荷; ⑥求解线性或者非线性微分方程组得到节点值,如不同节点的位移; ⑦通过后处理获得最大应力、应变等信息。 结构的离散化是有限元的基础。所谓离散化就是将分析的结构分割成为有限
UG有限元分析教程
第1章高级仿真入门 在本章中,将学习: ?高级仿真的功能。 ?由高级仿真使用的文件。 ?使用高级仿真的基本工作流程。 ?创建FEM和仿真文件。 ?用在仿真导航器中的文件。 ?在高级仿真中有限元分析工作的流程。 1.1综述 UG NX4高级仿真是一个综合性的有限元建模和结果可视化的产品,旨在满足设计工程师与分析师的需要。高级仿真包括一整套前处理和后处理工具,并支持广泛的产品性能评估解法。图1-1所示为一连杆分析实例。 图1-1连杆分析实例 高级仿真提供对许多业界标准解算器的无缝、透明支持,这样的解算器包括NX Nastran、MSC Nastran、ANSYS和ABAQUS。例如,如果结构仿真中创建网格或解法,则指定将要用于解算模型的解算器和要执行的分析类型。本软件使用该解算器的术语或“语言”及分析类型来展示所有网格划分、边界条件和解法选项。另外,还可以求解模型并直接在高级仿真中查看结果,不必首先导出解算器文件或导入结果。 高级仿真提供基本设计仿真中需要的所有功能,并支持高级分析流程的众多其他功能。 ?高级仿真的数据结构很有特色,例如具有独立的仿真文件和FEM文件,这有利于在分布式工作环境中开发有限元(FE)模型。这些数据结构还允许分析师轻松 地共享FE数据去执行多种类型分析。
UG NX4高级仿真培训教程 2 ?高级仿真提供世界级的网格划分功能。本软件旨在使用经济的单元计数来产生高质量网格。结构仿真支持完整的单元类型(1D、2D和3D)。另外,结构级仿真 使分析师能够控制特定网格公差。例如,这些公差控制着软件如何对复杂几何体 (例如圆角)划分网格。 ?高级仿真包括许多几何体简化工具,使分析师能够根据其分析需要来量身定制CAD几何体。例如,分析师可以使用这些工具提高其网格的整体质量,方法是消 除有问题的几何体(例如微小的边)。 ?高级仿真中专门包含有新的NX传热解算器和NX流体解算器。 NX传热解算器是一种完全集成的有限差分解算器。它允许热工程师预测承受热载荷系统中的热流和温度。 NX流体解算器是一种计算流体动力学(CFD)解算器。它允许分析师执行稳态、不可压缩的流分析,并对系统中的流体运动预测流率和压力梯度,也可 以使用NX传热和NX流体一起执行耦合传热/流体分析。 1.2仿真文件结构 当向前通过高级仿真工作流时,将利用4个分离并关联的文件去存储信息。要在高级仿真中高效地工作,需要了解哪些数据存储在哪个文件中,以及在创建那些数据时哪个文件必须是激活的工作部件。这4个文件平行于仿真过程,如图1-2所示。 图1-2仿真文件结构 设计部件文件的理想化复制 当一个理想化部件文件被建立时,默认有一.prt扩展名,fem#_i是对部件名的附加。例如,如果原部件是plate.prt,一个理想化部件被命名为plate_fem1_i.prt。 一个理想化部件是原设计部件的一个相关复制,可以修改它。 理想化工具让用户利用理想化部件对主模型的设计特征做改变。不修改主模型部件,
奥迪A8轿车适应空气悬架系统
奥迪A8轿车自适应空气悬架系统 奥迪A8轿车作为奥迪品牌的顶级车型,配备了新开发的自适应空气悬架(图1)。 它利用电子减振调控装置可以实时跟踪汽车当前的行驶状态测得车轮的运动状态(非簧载质量)和车身的运动状态(簧载质量)。在四个可选模式范围内实现了不同的减振特性曲线。每个减振器都可单独进行调控。因此,在设定好的每种模式(舒适型或运动型)下均能够保证汽车具有最佳的舒适性和行车安全性。在设定的模式的框架下,车身高度自动调控程序和减振特性曲线被整合成一个系统。 系统的组成及原理 系统的组成如图2所示。 主要部件及功能 1.空气弹簧 空气弹簧采用外部引导式。它被封装在一个铝制的圆筒内。为了防止灰尘进入圆筒和(空气弹簧)伸缩囊之间,用一个密封圈密封线圈活塞和气缸之间的区域。密封圈可在维修时更换,空气弹簧伸缩囊不能单独更换。出现故障时,必须更换整个弹簧/减振支柱。 为了保证行李箱具有尽可能大的可利用空间和最大储物宽度,最大限度地减小了空气弹簧的直径。为了满足舒适性的要求,空气弹簧体积应最小。此冲突的解决方案是使用一个与减振器相连的容器存储额外的空气。 空气弹簧不仅替代了钢制弹簧,而且相对于钢制弹簧还有独特的优点。空气弹簧使用了铝制气缸的新式外部引导性装置减小了空气弹簧伸缩囊的壁厚。这样,在路面不平情况下响应更加灵敏。 2.减振器(图3和图4) 构造: 使用了一个无级电子双管气压减振器(无级减振控制系统=CDC减振器)。活塞上的主减振阀门通过弹簧机械预紧。在阀门上方安装有电磁线圈,连接导线经由活塞杆的空腔与外部连接。 功能: 减振力主要取决于阀门的通流阻力。流过的油的通流阻力越大,减振力也就越大。 以弹簧挠度(弹性)跳动(等于压力分段减振)为例从原则上说明工作原理(图5): 当电磁线圈上没有电流作用时,减振力达到最大。减振力最小时电磁线圈上的电流大约为1800mA。在紧急运行时不对电磁线圈通电。这样就设定了最大减振力,并通过其来保证车辆行驶时动态稳定。
汽车操纵稳定性仿真
实验4 汽车操纵稳定性仿真 一.实验目的 1.了解和掌握汽车操作稳定性实验条件、试验规程、数据实验方法以及实验仪器设备。 2.熟悉掌握Adams/Car软件的应用并能实际操作完成汽车操控性仿真的全过程。 二.实验器材 Adams软件、计算机一台 三.实验结果与分析 1.定转弯半径仿真 汽车在行驶过程中,由于路面的侧向倾斜,侧向风或者曲线行驶时的离心力等的作用,车轮中心沿车轴方向产生一个侧向力F。因为车轮是有弹性的,所以,在侧向力F 未达到车轮与地面间的最大摩擦力时,侧向力 F 使轮胎产生变形,使车轮倾斜,导致车轮行驶方向偏离预定的行驶路线。这种现象,就称为汽车轮胎的侧偏现象。汽车轮胎的中心线,在侧向力F 的作用下,与车轮平面错开了一定距离,而且有一个倾斜角,这个倾斜角,就叫做汽车轮胎的侧偏角。 侧偏最常见于汽车转弯。汽车转弯时,前后轮都会产生侧偏角。如果前后轮侧偏角相等,则汽车实际转弯半径等于方向盘转角对应的转弯半径,称为“中性转向”;如果前轮侧偏比后轮大,汽车实际转弯半径大于方向盘转角对应的转弯半径,称为“不足转向”;如果后轮侧偏比前轮大,汽车实际转弯半径小于方向盘转角对应的转弯半径,称为“过度转向”。 在设置转弯半径28m,车辆以10km/h的初速度加速到120km/h时,汽车行驶到最后阶段失去控制,脱离预先设计好的圆形轨道。其行驶轨迹如下图所示;
图1 从图中我们可以看出,汽车在行驶大概一圈的时候冲出轨道,且距离圆心随着时间增长越来越远。这是由于随着速度的不断增加,汽车所受到的侧向力不断变大,当地面的摩擦力不足以平衡侧向力时,汽车便会失去控制。从图中可以看出,在汽车达到120km/h时候汽车已经偏原来的轨道很大一段距离。 在这实验的基础上,改了一下数据,设置转弯半径20m,出事加速度0.1m/s^2最终加速度为4m/s^2,得到了以下曲线: 图2 图3 从图中,我们可以得到,汽车在设定好的轨道中良好运行,没有冲出跑道。再上一个控制速度的实验中,所得到的最终加速度的大小大概为 5.5g,而控制加速度的实验中,所得到的最终加速度大小为0.4g,明显小于前者,因此猜想,当汽车的加速度比较大时,汽车比较容易冲出跑道 为了证实以上猜想,设定转弯半径20m,初始加速度0.01g,最终加速度5g,得到以下实验曲线:
基于Simulink的车辆两自由度操纵稳定性模型
基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1.二自由度汽车模型 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自 由度的汽车模型,忽略转向系统的 影响,直接一前轮转角作为输入; 忽略悬架的作用,认为汽车车厢只 作用于地面的平面运动。
2.运动学分析 分析时,令车辆坐标系原点与汽车质心重合。首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。 确定汽车质心的(绝对)加速度在车辆坐标系的分量 和 。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度 1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: 由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为: ()cos ()sin cos cos sin sin u u u v v u u u v v θθ θθθθ +??--+??=?+??---??
Abaqus6.14有限元仿真分析视频教程-实例篇(上)
Abaqus6.14有限元仿真分析视频教程-实例篇(上)
江西省南昌市2015-2016学年度第一学期期末试卷(江西师大附中使用)高三理科数学分析 一、整体解读 试卷紧扣教材和考试说明,从考生熟悉的基础知识入手,多角度、多层次地考查了学生的数学理性思维能力及对数学本质的理解能力,立足基础,先易后难,难易适中,强调应用,不偏不怪,达到了“考基础、考能力、考素质”的目标。试卷所涉及的知识内容都在考试大纲的范围内,几乎覆盖了高中所学知识的全部重要内容,体现了“重点知识重点考查”的原则。 1.回归教材,注重基础 试卷遵循了考查基础知识为主体的原则,尤其是考试说明中的大部分知识点均有涉及,其中应用题与抗战胜利70周年为背景,把爱国主义教育渗透到试题当中,使学生感受到了数学的育才价值,所有这些题目的设计都回归教材和中学教学实际,操作性强。 2.适当设置题目难度与区分度
选择题第12题和填空题第16题以及解答题的第21题,都是综合性问题,难度较大,学生不仅要有较强的分析问题和解决问题的能力,以及扎实深厚的数学基本功,而且还要掌握必须的数学思想与方法,否则在有限的时间内,很难完成。 3.布局合理,考查全面,着重数学方法和数学思想的考察 在选择题,填空题,解答题和三选一问题中,试卷均对高中数学中的重点内容进行了反复考查。包括函数,三角函数,数列、立体几何、概率统计、解析几何、导数等几大版块问题。这些问题都是以知识为载体,立意于能力,让数学思想方法和数学思维方式贯穿于整个试题的解答过程之中。 二、亮点试题分析 1.【试卷原题】11.已知,,A B C 是单位圆上互不相同的三点,且满足AB AC → → =,则AB AC → → ?的最小值为 ( )
整车操纵稳定性仿真分析报告分析解析
整车操纵稳定性仿真 分析报告分析解析Revised on November 25, 2020
L11整车操纵稳定性仿真分析报告 (HB11A/HB12A) 编制(日期) 校对(日期) 审核(日期) 批准(日期) 简式国际汽车设计(北京)有限公司 L11整车操纵稳定性仿真分析报告(HB11A/HB12A) 1.定半径稳态圆周试验 试验方法 HB11A处于满载状态,沿半径为40m的定半径圆周进行回转运动,开始以最低稳定速度进入圆周,找准方向盘的位置,使汽车可以沿圆周进行回转运动,开始记录,然后缓慢连续而均匀地加速(纵向加速度不超过 m/s2),加速的同时调整方向盘转角以维持定半径圆周运动,这个过程中车辆不应超出车道m,直至不能维持稳态定半径圆周运动条件时或受发动机功率限制所能达到的最大侧向加速度为止。记录整个过程,建议使用满足试验条件的最高档位。试验按向左转和向右转两个方向进行,每次试验开始时车身应处于正中位置。
数据处理 “方向盘转角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。 图1 方向盘转角—侧向加速度(左转) 从图1 计算得到左转不足转向梯度为137o/g 图2 方向盘转角—侧向加速度(右转) 右转不足转向梯度为g,则HB11A平均不足转向梯度为g。 HB11A的角传动比约为,则不足转向梯度/转向系角传动比为g。 “质心侧偏角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。 图3 质心侧偏角——侧向加速度(左转) 左转侧偏角梯度为g。 图4 质心侧偏角——侧向加速度(右转) 右转侧偏角梯度为g,则HB11A平均侧偏角梯度为g。 “车身侧倾角——侧向加速度”拟合曲线线性部分的斜率,取侧向加速度为时的曲线斜率。 图5 车身侧倾角——侧向加速度(左转) 左转侧倾角梯度为g。 图6 车身侧倾角—侧向加速度(右转) 右转侧倾角梯度为g,则HB11A平均侧倾角梯度为g。 2.方向盘转角阶跃输入试验 试验方法 HB11A处于满载状态,以70km/h的车速稳定直线行驶,开始记录数据,以尽可能快的速度(阶跃时间为转动方向盘,达到预定的转角,保持方向盘
有限元仿真技术的发展及其应用
有限元仿真技术的发展及其应用 许荣昌 孙会朝 (技术研发中心) 摘 要:介绍了目前常用的大型有限元分析软件的现状与发展,对其各自的优势进行了分析,简述了有限元软件在冶金生产过程中的主要应用领域及其发展趋势,对仿真技术在莱钢的应用进行了展望。 关键词:有限元仿真 冶金生产 发展趋势 0 前言 自主创新,方法先行,创新方法是自主创新的根本之源,同时,随着市场竞争的日益激烈,冶金企业的产品设计、工艺优化也由经验试错型向精益研发方向发展,而有限元仿真技术正是这种重要的创新方法。近年来随着计算机运行速度的不断提高,有限元分析在工程设计和分析中得到了越来越广泛的应用,比如,有限元分析在冶金、航空航天、汽车、土木建筑、电子电器、国防军工、船舶、铁道、石化、能源、科学研究等各个领域正在发挥着重要的作用,主要表现在以下几个方面:增加产品和工程的可靠性;在产品的设计阶段发现潜在的问题;经过分析计算,采用优化设计方案,降低原材料成本;缩短产品研发时间;模拟试验方案,减少试验次数,从而减少试验成本。与传统设计相比,利用仿真技术,可以变经验设计为科学设计、变实测手段为仿真手段、变规范标准为分析标准、变传统分析技术为现代的计算机仿真分析技术,从而提高产品质量、缩短新产品开发周期、降低产品整体成本、增强产品系统可靠性,也就是增强创新能力、应变能力和竞争力(如图1、2) 。 图1 传统创新产品(工艺优化)设计过程为大循环 作者简介:许荣昌(1971-),男,1994年毕业于武汉钢铁学院钢铁冶金专业,博士,高级工程师。主要从事钢铁工艺技术研究工 作。 图2 现代CAE 创新产品(工艺优化)设计过程为小循环 1 主要有限元分析软件简介 目前,根据市场需求相继出现了各种类型的应用软件,其中NAST RAN 、AD I N A 、ANSYS 、ABAQUS 、MARC 、MAGS OFT 、COS MOS 等功能强大的CAE 软件应用广泛,为实际工程中解决复杂的理论计算提供了非常有力的工具。但是,各种软件均有各自的优势,其应用领域也不尽相同。本文将就有限元的应用范围及当今国际国内CAE 软件的发展趋势做具体的阐述,并对与冶金企业生产过程密切相关的主要有限元软件ANSYS 、ABAQUS 、MARC 的应用领域进行分析。 MSC 1Soft w are 公司创建于1963年,总部设在美国洛杉矶,MSC 1Marc 是MSC 1Soft w are 公司于1999年收购的MARC 公司的产品。MARC 公司始创于1967年,是全球首家非线性有限元软件公司。经过三十余年的发展,MARC 软件得到学术界和工业界的大力推崇和广泛应用,建立了它在全球非线性有限元软件行业的领导者地位。随着Marc 软件功能的不断扩展,软件的应用领域也从开发初期的核电行业迅速扩展到航空、航天、汽车、造船、铁道、石油化工、能源、电子元件、机械制造、材料工程、土木建筑、医疗器材、冶金工艺和家用电器等,成为许多知名公司和研究机构研发新产品和新技术的重要工具。在航空业MSC 1Nastran 软件被美国联邦航空管理局(F AA )认证为领取飞行器适 3 1
汽车操纵稳定性和平顺性仿真研究报告
科研训练文献阅读综述题目:汽车操纵稳定性和平顺性的仿真研究 姓名 : 学号 : 专 业: 班 级: 指导老师: 时间:
第一章整车操纵稳定性实验仿真分析本章节,在前悬架优化的基础上建立整车模型。整车进行转向回正实验、转向轻便性实验、稳态回转实验,并根据国标计分评价。 1.1转向回正实验仿真分析 转向回正实验是研究汽车瞬态响应特性的一种重要实验方法,尤其是研究汽车能否恢复直线行驶能力的一种重要实验方法,汽车的转向回正表达了汽车的自由控制运动特性,其实质是一种力阶跃输入实验。国标GB/T6323.4-94对 实验做出了相关规定。低速回正实验在半径为15m圆周上侧向加速度达到 4m/s A2,,然后然放松转向盘,记录汽车的状态。由于该重货车最高车速为90km/h,按照国标规定不需要进行高速转向回正实验。对于侧向加速度达不到 4 士0.2m/sA2的汽车,按实验汽车所能达到的最高侧向加速度进行实验。实验 [1] 按向左与向右两个方向进行,每个方向三次 1.1.1仿真曲线: 仿真中设定圆弧半径为15m,要达到4 士0.2m/s的侧向加速度车速必须大于 7.746m/sA2。左转低速转向回正实验具体仿真结果如下(右转仿真结果略>: 图6-1转向盘转角输入
K6-3横摆角速度响应图6-4侧倾旳响应
图6-5质心侧偏角响应 1.1.2仿真结论: 对于虚拟样车系统,回正特性的主要参数根据国标GB/T6323.4-94规定的 转向回正实验要求计算,结果见表6-1 o 表6T回正特性主要参数 1.2转向瞬态响应实验(转向盘转角阶跃输入>仿真分析 瞬态转向特性是指汽车在受到外界扰动下,达到稳态状态前表现出来的特性,瞬态转向特性是汽车最重要的性能之一,是评价汽车高速行驶安全性的一个重要指标。 1.2.1实验方法: 具体做法参照国标GB/T6323.2-1994。实验车速按被测汽车最高车速的70% 并四舍五入为10的整数倍确定。该重型货车最高车速为90KM/h,所以实验车 速取6Okm/h实验中转向盘转角的预选位置(输入角〉,按稳态侧向加速度值1-
汽车操纵稳定性和平顺性的仿真研究
本科生科研训练-项目申请表 2011 年 1 月 2日 项目名称: 汽车操纵稳定性和平顺性的仿真研 究 项目负责人: 所在学院: 能源与动力工程学院 班 级: 联系电话: 指导教师 学校代码:10128 学 号:200820302071
成绩考核表 项目名称汽车操纵稳定性和平顺性的仿真研究成绩 完成人姓名班级交运08- 评阅内容评阅要求得分 资料调研完成相关科研资料的调研。 撰写项目概述。(10分) 立项意义研究现状选题是否紧密结合生产实际或贴近学科前沿。 撰写项目研究意义和课题研究现状。(40分,各20分) 创新性创新点是否明确,创新性与实用性是否兼备。不作评价 成果预见性所研究项目的成果应用前景是否看好,撰写项目应用 前景预测。 不作评价 研究内容研究内容是否按照项目名称、技术路线及目标任务等要求来设置。 只写项目研究内容。(10分) 技术路线技术路线是否科学、合理,思路是否正确完整。不作评价研究方法研究方法是否先进可行,校内条件是否可以达到。不作评价 研发能力研发队伍的合作精神,知识积累及指导老师的相关科 研项目的资助力度是否有利于本项目的开展。 不作评价 完成情况本次科研训练作业是否按期完成;撰写内容、撰写格式是否规范。(20分) 格式规范撰写内容、撰写格式是否规范。(20分) 得分合计 综合评语
一、项目概况 项目名称:汽车操纵稳定性和平顺性的仿真研究 英文:Study on simulation of vehicle handling and stability of peace along 项目概述:(400字以内,五号字,行距16磅) 汽车的操纵稳定性和平顺性是指在驾驶者不感到过分紧张疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力汽车的操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而且也是决定高速汽车安全行驶的一个主要性能随着社会经济的发展和汽车科学技术的进步,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势。频繁的交通事故使公路的交通安全成为社会广泛关注的问题。为了保证安全行驶,汽车的操纵稳定性受到汽车设计者的很大重视,成为现代汽车的重要使用性能之一。几十年来,如何设计和试验汽车以获得良好的安全性,尤其是如何试验和评价汽车的操纵稳定性,始终是各国学者和设计师们的主要研究方向之一。 本项目通过对汽车在悬架、转向、车身等初始参数匹配状态下整车的操纵稳定性和平顺性的研究,得出的仿真实验数据为评估、改进、优化同型车辆提供了重要的理论参数。该项目研究为整车的设计开发开拓了更加科学的方法解决了一些汽车运动学和动力学的难题。 关键词操纵稳定性;行驶平顺性;仿真技术 类别 √A.自然科学类学术论文□B.科技发明制作A类□C.科技发明制作B类注:科技发明制作A类:指科技含量较高、制作投入较大的作品; 科技发明制作B类:投入较少,为生产技术或社会生活带来便利的小发明、小制作。 申请资助金额大写:小写:项目起止时间 结题形式(打√)√A、论文□B、著作□C、报告□D、软件 申请人情况姓名性别男民族汉出生年月专业交通运输班级 学号2008 所在学院能源与动力工程学院 项 目 组 主 要 成 员 姓名性别学历院系、专业、年级项目分工签名
汽车操纵稳定性试验解析
汽车操纵稳定性试验解析! 汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也 是决定汽车安全行驶的一个主要性能;为了保证安全行驶, 汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的 重要使用性能之一,如何试验并评价汽车的操稳性显得极其 重要。汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态 的能力。一、常用试验仪器 1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等; 2、光 束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差;3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加 速度与纵向加速度等运动参数;4、力矩及转角仪:测转向盘转角或力矩;5、五轮仪和磁带机等。二、试验分类三、稳态回转试验01 试验步骤1、在试验场上,用明显的颜色画出半径为15m 或20m 的圆周;2、接通仪器电源,使之加热到正常工作温度;3、试验 开始前,汽车应以侧向加速度为3m/s2 的相应车速沿画定的圆周行驶500m 以使轮胎升温。4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内
都能对准地面所画的圆周时,固定转向盘不动,停车并开始 记录,记下各变量的零线,然后,汽车起步,缓缓连续而均 匀地加速(纵向加速度不超过0·25m/s2),直至汽车的侧向加速度达到6· 5m/s2 为止,记录整个过程。5、试验按向左转和右转两个方向进行,每个方向试验三次。每次试验开始时车身应处于正中央。 02 评价条件 1、中性转向点侧向加速度值An :前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好; 2、不足转向度:按前后桥侧偏角之差与侧向加速度关 系曲线上侧向加速度2m/s2 点的平均值计算,越小越好; 3、车厢侧倾度K :按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s2 点的平均斜率计算,越小越好。转向特性曲线图四、转向回正试验 01 试验步骤一)低速回正性能试验:1 、在试验场地上用明显的颜色画出半径为15m 的圆周。2、试验前试验汽车沿半径为15m 的圆周、以侧向加速度达3m/ s 2 的相应车速,行驶500m ,使轮胎升温。3、接通仪器电源,使其达到正常工 作温度。4、试验汽车直线行驶,记录各测量变量零线,然 后调整转向盘转角,使汽车沿半径为15± 1m 的圆周行驶,调整车速,使侧向加速度达到4± 0.2m/s 2, 固定转向盘转角,稳定车速并开始记录,待3s 后,驾驶员突然松开转