第11周 动力学的多过程问题
第11周 动力学的多过程问题
1.水平面上一个质量为m 的物体,在一水平恒力F 作用下,由静止开始做匀加速直线运动,经时间t 后撤去外力,又经时间2t 物体停了下来.则物体受到的阻力应为下列四个选项中的哪一个( )
A .F
B .2F
C .3F
D .4
F 2.某物体由静止开始做直线运动,物体所受合力F 随时间t 变化的图象如图所示,在 0~8s 内,下列说法正确的是( )
A .物体在第2s 末速度和加速度都达到最大值
B .物体在第6s 末的位置和速率,都与第2s 末相同
C .物体在第4s 末离出发点最远,速率为零
D .物体在第8s 末速度和加速度都为零,且离出发点最远
3.在地面上以初速度0v 竖直向上抛出一小球,经过02t 时间小球落回抛出点,其速率为1v ,已知小球在空中运动时所受空气阻力与小球运动的速率成正比,则小球在空中运动时速率v 随时间t 的变化规律可能是( )
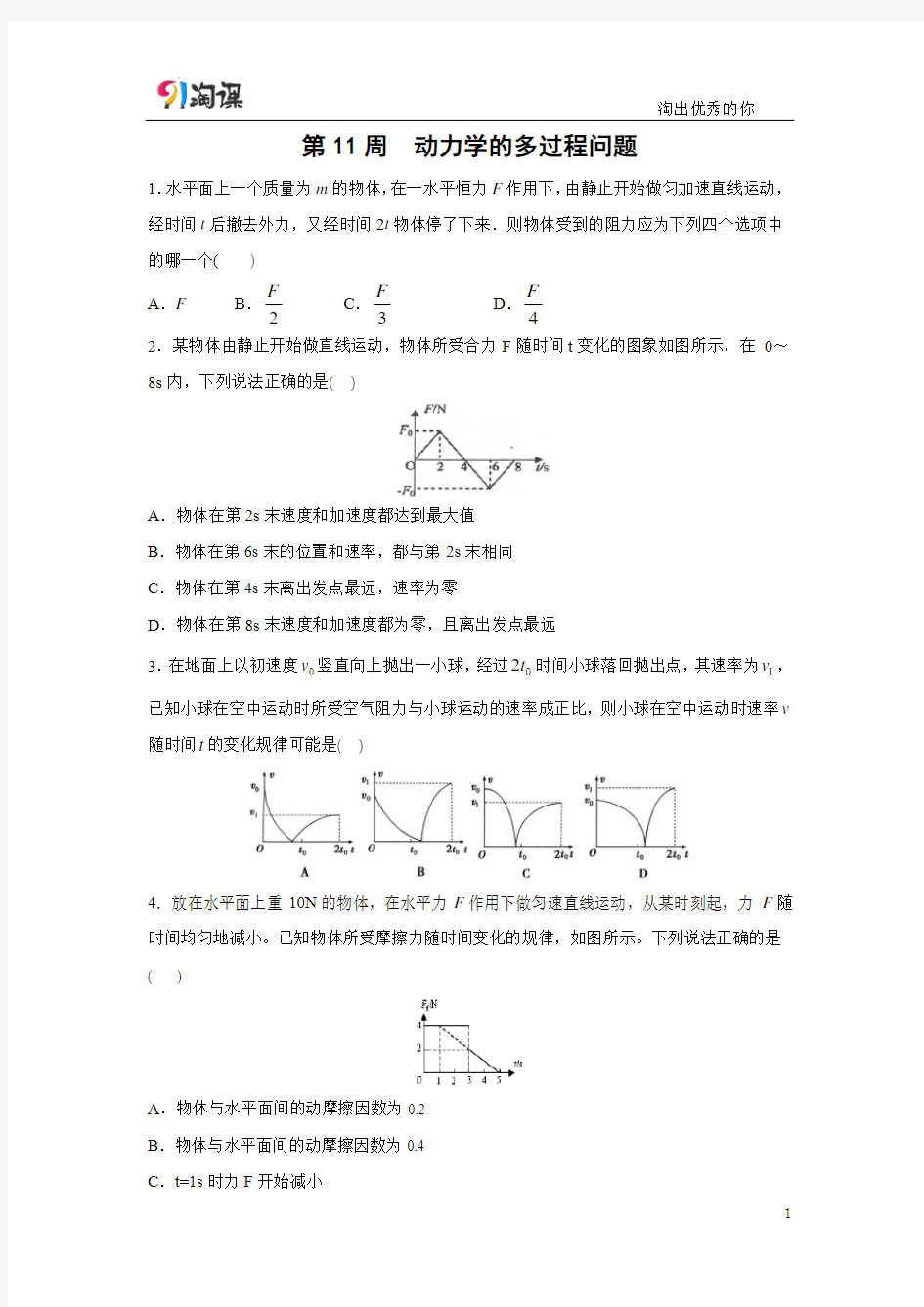
4.放在水平面上重10N 的物体,在水平力F 作用下做匀速直线运动,从某时刻起,力F 随时间均匀地减小。已知物体所受摩擦力随时间变化的规律,如图所示。下列说法正确的是
( )
A .物体与水平面间的动摩擦因数为0.2
B .物体与水平面间的动摩擦因数为0.4
C .t=1s 时力F 开始减小
D.t=3s时力F开始减小
5.2014年2月15日凌晨,在索契冬奥会自由式滑雪女子空中技巧比赛中,中国选手徐梦
桃以83.50分夺得银牌。比塞场地可简化为由如图所示的①助滑区、②弧形过渡区、③着陆坡、④减速区等组成。若将运动员看做质点,且忽略空气阻力,下列说法正确的是()
A.运动员在助滑区加速下滑时处于超重状态
B.运动员在弧形过渡区运动过程中处于失重状态
C.运动员在跳离弧形过渡区至着陆之前的过程中处于完全失重状态
D.运动员在减速区减速过程中处于失重状态
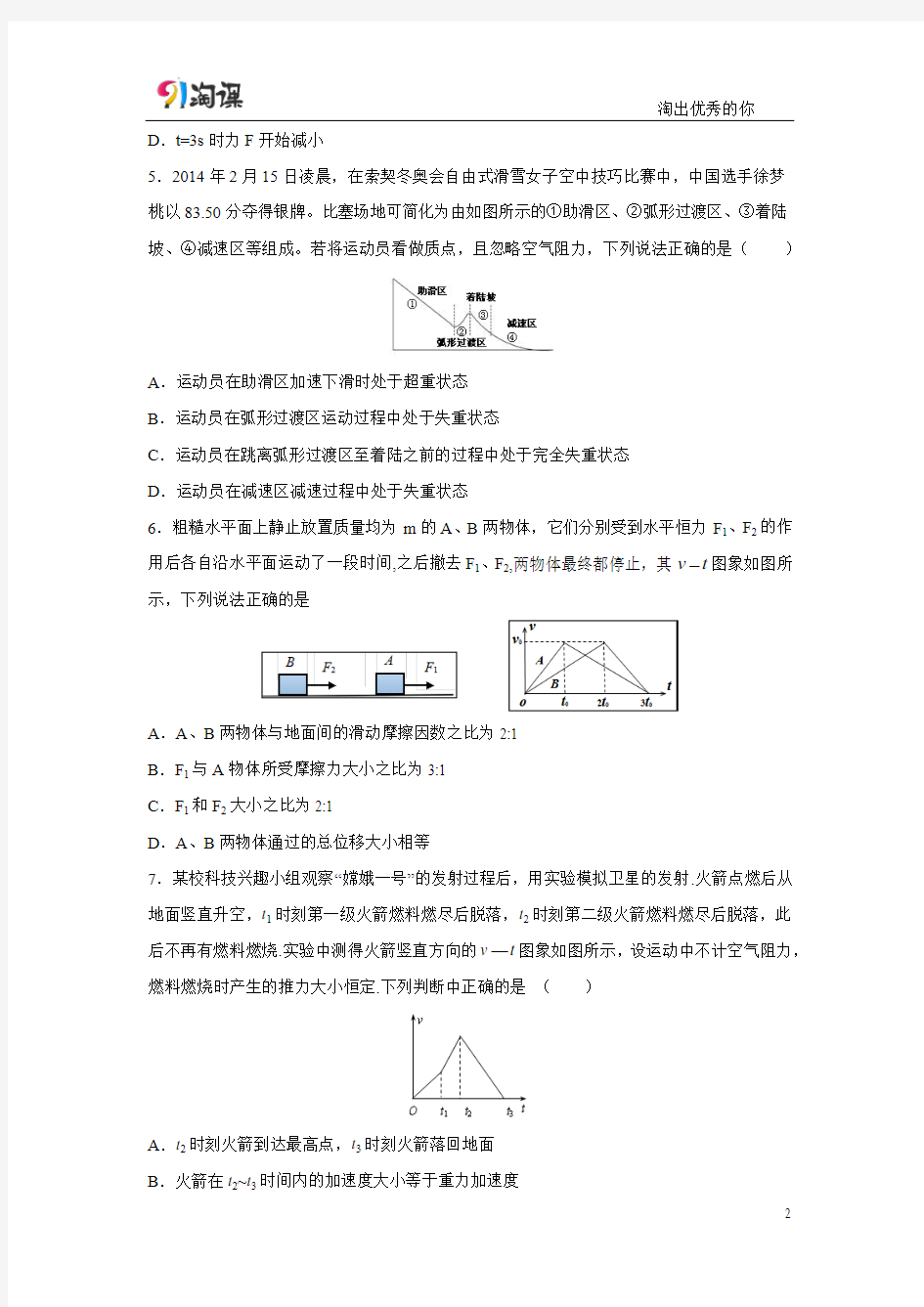
6.粗糙水平面上静止放置质量均为m的A、B两物体,它们分别受到水平恒力F1、F2的作用后各自沿水平面运动了一段时间,之后撤去F1、F2,两物体最终都停止,其v t 图象如图所示,下列说法正确的是
A.A、B两物体与地面间的滑动摩擦因数之比为2:1
B.F1与A物体所受摩擦力大小之比为3:1
C.F1和F2大小之比为2:1
D.A、B两物体通过的总位移大小相等
7.某校科技兴趣小组观察“嫦娥一号”的发射过程后,用实验模拟卫星的发射.火箭点燃后从地面竖直升空,t1时刻第一级火箭燃料燃尽后脱落,t2时刻第二级火箭燃料燃尽后脱落,此后不再有燃料燃烧.实验中测得火箭竖直方向的v—t图象如图所示,设运动中不计空气阻力,燃料燃烧时产生的推力大小恒定.下列判断中正确的是()
A.t2时刻火箭到达最高点,t3时刻火箭落回地面
B.火箭在t2~t3时间内的加速度大小等于重力加速度
C.火箭在0~t1时间内的加速度大于t1~t2时间内的加速度
D.t1~t2时间内火箭处于超重状态,t2~t3时间内火箭处于失重状态
8.质量为1kg的物体静止在水平面上,物体与水平面之间的动摩擦因数为0.2。对物体施加一个大小变化、方向不变的水平拉力F,使物体在水平面上运动了3t0的时间。为使物体在3t0时间内发生的位移最大,力F随时间的变化情况应该为下面四个图中的哪一个?
(g=10m/s2)
9.如图所示,水平传送带逆时针匀速转动,速度大小为8 m/s,A、B为两轮圆心正上方的点,AB= L1=6m,左右两端分别与传送带表面无缝对接,弹簧右端固定,自然长度时左端恰好位于B点,现将一小物块与弹簧接触(不栓结),并压缩至图示位置然后释放,已知小物块与各接触面间动摩擦因数均为μ=0.2,AP=L2 =5 m,小物块与轨道左端P碰撞无机械能损失,小物块最后刚好能返回到B点减速到零,g=10 m/s2,则下列说法正确的是()
A.小物块从释放后第一次到B点的过程中,做加速度减小的加速运动
B.小物块第一次从B点到A点的过程中,一定做匀加速直线运动
C.小物块第一次到A点时,速度大小一定等于8m/s
D
10.如图所示,一质量为5kg的滑块在F=15N的水平拉力作用下,由静止开始做匀加速直线运动,若滑块与水平地面间的动摩擦因数为0.2(取g=10m/s2),求:
(1)滑块运动的加速度多大?
(2)如果力F作用经8s后撤去,则滑块在撤去F后还能滑行多远?
11.如图所示,一小轿车从高为10m、倾角为37°的斜坡顶端从静止开始向下行驶,当小轿车到达底端时进入一水平面,在距斜坡底端115m的地方有一池塘,发动机在斜坡上产生的牵引力为2×103N,在水平地面上调节油门后,发动机产生的牵引力为1.4×104N,小轿车的质量为2t, 小轿车与斜坡及水平地面间的动摩擦因数均为0.5(g取10m/s2)。求:
(1)小轿车行驶至斜坡底端时的速度;
(2)为使小轿车在水平地面上行驶而不掉入池塘,在水平地面上加速的时间不能超过多少?(轿车在行驶过程中不采用刹车装置)
12.(2013·上海卷)如图,质量为M、长为L、高为h的矩形滑块置于水平地面上,滑块与地面间动摩擦因数为μ;滑块上表面光滑,其右端放置一个质量为m的小球。用水平外力击打滑块左端,使其在极短时间内获得向右的速度v0,经过一段时间后小球落地。求小球落地时距滑块左端的水平距离。
答案精析
1.【答案】C
【解析】设阻力为F f ,由牛顿第二定律得:F -F f =ma 1,F f =ma 2,v =a 1t ,v =a 2·
2t ,以上四式联立可得:F f =
3F ,只有C 正确. 2.【答案】D
【解析】A 0~2s 加速度逐渐增大,第2s 末加速度最大;在2~4s 内F 合逐渐减小,加速度逐渐减小,但方向没有改变,所以物体沿原方向做加速度减小的加速运动,则4s 末的速度达到最大值,故A 错误;B 、在4~6s 内F 反向逐渐增大,加速度也反向逐渐增大,物体沿原方向做加速度增大的减速运动,故物体在第6s 末的位置大于物体在第2s 末的位置,故B 错误;C 、D 、在6~8s 内F 渐减小,加速度也逐渐减小,物体沿原方向做加速度减小的减速运动;根据对称性可知,8s 末物体的速度为零.且由上分析可知,物体在第4s 末速度最大,在第8s 末离出发点最远,故C 错误,D 正确;故选D 。
3.【答案】A
【解析】小球上升过程中,由牛顿第二定律mg kv ma +=,故随速度的减小,加速度逐
渐减小,v-t 线切线的斜率逐渐减小;当物体下降过程中,由牛顿第二定律mg kv ma -
=,则随速度逐渐增大,加速度逐渐减小,v-t 线切线的斜率逐渐减小;由于有阻力作用,故回到地面的速度将小于初速度v 0,故选项A 正确;故选A 。
4.【答案】BC
【解析】从图中看出,摩擦力从3 s 开始逐渐减小,1 s 到3 s 内不变,知t=1 s 时力F 开始减小,做减速运动,受滑动摩擦力,3s 物体的速度刚好变为零,然后摩擦力变为静摩擦力,大小随F 的变化而变化,C 对,D 错;0到1 s 物体匀速,摩擦力等于4 N ,压力大小等于
物体重力大小为10 N B 对,A 错
5.【答案】C
【解析】运动员在助滑区加速下滑时,加速度有竖直向下的分加速度,所以出于失重状态,
A 错误;在弧形过渡区运动过程中合力指向圆心,有竖直向上的分加速度,所以出于超重状态,
B 错误;运动员在跳离弧形过渡区至着陆之前的过程中运动员在空中运动,只受重力,加速度竖直向下,为g ,出于完全失重状态,
C 正确;运动员在减速区减速过程中有竖直向上的分加速度,出于超重状态,
D 错误
6.【答案】BD
【解析】A 、由v t -图象可知,两个匀减速运动的加速度之比为1:2;由牛顿第二定律可知:A 、B 受摩擦力大小1:2,故选项A 错误;B 、对A 物体加速(1A a )和减速(2A a )比为1:2,
由牛顿第二定律可知,12A f ma =,可得113F f =,选项B 正确.C 、对B 物体加速(1B a )和减速(2B a )比为2:1,同理221B F f ma -=,22B f ma =,联立可得:223F f =,则212F F =,选项C 错误.D 、v t -图象面积表示位移为项D 正确,故选AD.
7.【答案】BD
【解析】由v-t 图像可知,0—t 1 及t 1—t 2时间段内为加速运动,t 2—t 3时间段内为减速运动,速度始终为正值,t 3时刻离地最远,A 错;由题意知t 2后不再有燃料燃烧,火箭只受重力,B 对;v —t 图像中斜率大小表示加速度,C 错;t 1—t 2时间段内火箭加速度向上,处于超重状态,t 2—t 3时间段内只受重力,火箭处于失重状态,D 对。
8.【答案】D
【解析】若物体发生滑动,则其所受的摩擦力为2f mg μ==N ,所以AC 两种情况在开始阶段不能发生运动,B 选项物体先加速后减速在2t 0时,速度为零,然后再加速运动,D 选项物体在前2t 0时,做加速,然后再做减速,最后速度不为零,即D 选项的过程中的平均速度最大,所以发生的位移最大,故选D 。
9.【答案】CD
【解析】小物块释放后,受力分析,由牛顿第二定律可得,小物块向右运动,弹簧的形变量逐渐减小,弹力逐渐减小,加速度不断减小,当弹力减小到小于摩擦力后做减速运动,且加速度不断增大,即小物块先做加速度减小的加速运动,再做加速度增大的减速运动,故A 错误。小物块与挡板P 碰撞后反弹,由P 到B 做匀减速运动:
)(2-212L L g v P +-=μ,得小物块在P A 到P ,做匀减速运动:111A F f ma -=ma mg F =μ-弹
,
故C 正确。由上可知,小物块由B
到A B 错误。加速时:
1222gL v v B A μ=-,得L 1是最大的加速距离,小物块到B 点的最小速度;减速时:1222gL v v B A μ-=-,得L 1是最大的减速距离,小物块到B 小物块在B 点回复原长,离开弹簧,即小物块在B D 正确。
10.【答案】2
1m/s a =,16m s =
【解析】(1)关键受力分析摩擦力的确定方向
滑块受到水平向左的滑动摩擦力20.25kg 10m /s 10N f mg μ==??=,
根据牛顿第二定律F ma =有,21m /s a =
(2)力F 作用8s 后,物体速度为21m/s 8s 8m/s v at ===,此时合外力为10N f =-,
则其加速度为22m /s a =-,设物体继续滑行的距离为s ,则2202t as v v =-,解得16m s = 11.【答案】(1)10m/s (2)5s
【解析】(1)小轿车在斜坡上行驶时,由牛顿第二定律得F 1+mg sin37°-μmg cos37°=ma 1
代入数据得斜坡上小轿车的加速度a 1=3m/s 2
由21v =2a 1x 1=2a 1h /sin37°,得行驶至斜坡底端时的速度v 1=10m/s 。
(2)在水平地面上加速时F 2-μmg =ma 2,代入数据得a 2=2m/s 2
关闭油门后减速μmg =ma 3,代入数据得a 3=5m/s 2
关闭油门时轿车的速度为v 2,222212223
22v v v x a a -+= 得v 2=20m/s ,t =212
v v a -=5s ,即在水平地面上加速的时间不能超过5s 。 12h μ
【解析】小球下落前滑块的加速度11()f M m g a M M
μ+== 2222gL v v A P μ-=-
滑块做匀减速运动,到小球开始下落时的速度v ==
小球落地时间t
=小球落下后,滑块的加速度2
2f Mg
a g M M μμ=== 按此加速度,滑块停止运动时间22v
t a ==
≥
则小球落地时距滑块左侧2202()222M m g
v L
v M
s a g μμ+-===2
0()
2v M m L
g M μ+-
<
则小球落地时距滑块左侧2212s vt a t =-122h
g g μ=
h μ
多体系统动力学基本理论
第2章多体系统动力学基本理论
本章主要介绍多体系统动力学的基本理论,包括多刚体系统动力学建模、多柔体系统动力学建模、多体系统动力学方程求解及多体系统动力学中的刚性(Stiff)问题。通过本章的学习可以对多体系统动力学的基本理论有较深入的了解,为具体软件的学习打下良好的理论基础。 2.1 多体系统动力学研究状况 多体系统动力学的核心问题是建模和求解问题,其系统研究开始于20世纪60年代。从60年代到80年代,侧重于多刚体系统的研究,主要是研究多刚体系统的自动建模和数值求解;到了80年代中期,多刚体系统动力学的研究已经取得一系列成果,尤其是建模理论趋于成熟,但更稳定、更有效的数值求解方法仍然是研究的热点;80年代之后,多体系统动力学的研究更偏重于多柔体系统动力学,这个领域也正式被称为计算多体系统动力学,它至今仍然是力学研究中最有活力的分支之一,但已经远远地超过一般力学的涵义。 本节将叙述多体系统动力学发展的历史和目前国内外研究的现状。 2.1.1 多体系统动力学研究的发展 机械系统动力学分析与仿真是随着计算机技术的发展而不断成熟的,多体系统动力学是其理论基础。计算机技术自其诞生以来,渗透到了科学计算和工程应用的几乎每一个领域。数值分析技术与传统力学的结合曾在结构力学领域取得了辉煌的成就,出现了以ANSYS、NASTRAN等为代表的应用极为广泛的结构有限元分析软件。计算机技术在机构的静力学分析、运动学分析、动力学分析以及控制系统分析上的应用,则在二十世纪八十年代形成了计算多体系统动力学,并产生了以ADAMS和DADS为代表的动力学分析软件。两者共同构成计算机辅助工程(CAE)技术的重要内容。 多体系统是指由多个物体通过运动副连接的复杂机械系统。多体系统动力学的根本目的是应用计算机技术进行复杂机械系统的动力学分析与仿真。它是在经典力学基础上产生的新学科分支,在经典刚体系统动力学上的基础上,经历了多刚体系统动力学和计算多体系统动力学两个发展阶段,目前已趋于成熟。 多刚体系统动力学是基于经典力学理论的,多体系统中最简单的情况——自由质点和一般简单的情况——少数多个刚体,是经典力学的研究内容。多刚体系统动力学就是为多个刚体组成的复杂系统的运动学和动力学分析建立适宜于计算机程序求解的数学模型,并寻求高效、稳定的数值求解方法。由经典力学逐步发展形成了多刚体系统动力学,在发展过程中形成了各具特色的多个流派。 早在1687年,牛顿就建立起牛顿方程解决了质点的运动学和动力学问题;刚体的概念最早由欧拉于1775年提出,他采用反作用力的概念隔离刚体以描述铰链等约束,并建立了
多体动力学软件和有限元软件的区别(优.选)
有限元软件与多体动力学软件 数值分析技术与传统力学的结合在结构力学领域取得了辉煌的成就,出现了以ANSYS 、NASTRAN 等为代表的应用极为广泛的结构有限元分析软件。计算机技术在机构的静力学分析、运动学分析、动力学分析以及控制系统分析上的应用,则在二十世纪八十年代形成了计算多体系统动力学,并产生了以ADAMS 和DADS 为代表的动力学分析软件。两者共同构成计算机辅助工程(CAE )技术的重要内容。 商业通用软件的广泛应用给我们工程师带来了极大的便利,很多时候我们不需要精通工程问题中的力学原理,依然可以通过商业软件来解决问题,不过理论基础的缺失还是会给我们带来不少的困扰。随着动力有限元与柔性多体系统分析方法的成熟,有时候正确区分两者并不是很容易。 机械领域应用比较广泛的有两类软件,一类是有限元软件,代表的有:ANSYS, NASTRAN, ABAQUS, LS-DYNA, Dytran 等;另一类是多体动力学软件,代表的有ADAMS, Recurdyn , Simpack 等。在使用时,如何选用这两类软件并不难,但是如果深究这两类软件根本区别并不容易。例如,有限元软件可以分析静力学问题,也可以分析“动力学”问题,这里的“动力学”与多体动力学软件里面的动力学一样吗?有限元软件在分析动力学问题时,可以模拟物体的运动,它与多体动力学软件中模拟物体运动相同吗?多体动力学软件也可以分析柔性体的应力、应变等,这与有限元软件分析等价吗? 1 有限元软件 有限单元法是一种数学方法,不仅可以计算力学问题,还可以计算声学,热,磁等多种问题,我们这里只探讨有限元法在机械领域的应用。 计算结构应力、应变等的力学基础是弹性力学,弹性力学亦称为弹性理论,主要研究弹性体在外力作用或温度变化等外界因素下所产生的应力、应变和位移,从而为工程结构或构件的强度、刚度设计提供理论依据和计算方法。也就是说用有限元软件分析力学问题时,是用有限元法计算依据弹性力学列出的方程。 考虑下面这个问题,在()0t , 时间内给一个结构施加一个随时间变化的载荷()P t ,我们希望得到结构的应力分布,在刚刚施加载荷的时候,结构中的应力会有波动,应力场是变化的,但很久以后,应力场趋于稳定。 如果我们想得到载荷施加很久以后,稳定的应力场分布,那么应该用静力学分析方法分析
第三章 微生物反应动力学习题
第三章微生物反应动力学习题 1. 微生物反应的特点,其与化学反应的主要区别有那些? 2.简要回答微生物反应与酶促反应的最主要区别? 3. 进行微生物反应过程的物量衡算有何意义,请举例说明。 4.Monod 方程建立的几点假设是什么?Monod 方程与米氏方程主要区别是什么? 5.举例简要说明何为微生物反应的结构模型? 6. 以葡萄糖为单一碳源,进行某种微生物好氧或厌氧培养。已知此菌的比生长速率μ、葡萄糖的比消耗速率γ、细胞、葡萄糖、二氧化碳和各产物中的碳元素含量α1、α2、α3 和αi,利用这6 个常数给出此菌的与生长相关的物料衡算式。 7. 葡萄糖为碳源的复合培养基进行干酪乳杆菌的厌氧培养,1mol葡萄糖可生成乳酸或乙酸或乙醇或甲酸为0.05mol、1.05mol、0.94mol和1.76mol,试讨论各分解代谢的碳元素的恒算及生成ATP的摩尔数。 8. 荧光假单胞菌(Pseudomonas fluorescens)好氧培养中,已知:Y x/s=180g/mol,Y x/o=30.4g/mol,每消耗1mol葡萄糖可生成2molATP,氧化磷酸化的P:O比为1,求Y ATP? 9. 在啤酒酵母的生长试验中,消耗了0.2kg 葡萄糖和0.0672kgO2,生成0.0746kg 酵母菌和 0.121kgCO2,请写出该反应的质量平衡式,计算酵母得率Y X/S 和呼吸商RQ。 10. 微生物物繁殖过程中分裂一次生成两个子细胞,也有4 分裂或8 分裂的,试证明当n 分 裂时,有如下式子:,式中: 为倍增时间, 为世代时间。 11.分别采用含有蛋白胨和牛肉膏的复合培养基、含有20 余种氨基酸的合成培养基和基本培养基进行运动发酵单胞菌厌氧培养,碳源为葡萄糖,获得如下表所示结果。已知菌体的含碳量(以碳源/细胞计)为0.45g/g,求采用不同培养基时的Y KJ。 12. 葡萄糖为碳源进行酿酒酵母培养,呼吸商为1.04,氨为氮源。消耗100mol 葡萄糖和48mol氨,生成细胞48mol、二氧化碳312mol 和水432mol。求氧的消耗量和酵母细胞的化学组成。 13. 以葡萄糖为唯一碳源的最低培养基进行Candida utilis 培养,Y x/s=91.8g-细胞/mol 葡萄糖,求Y kJ。已知葡萄糖的燃烧热为2830KJ/mol。 15. 以葡萄糖为唯一碳源的基本培养基厌氧培养产气气杆菌, Yx/s= 26.1 g 细胞/mol 葡萄糖,试求分解代谢消耗葡萄糖的量占总消耗量的分率? 已知每克细胞含0.45g 碳,每mol 葡萄糖含72g 碳,且△S=△S 合成 +△S分解。 16.一个新发现的微生物在每一次细胞分裂时,可产生3个新细胞,由下列生长数据求:①此微生物的比生长速率μ(h-1);②两个细胞分裂的平均间隔时间;③此微生物细胞的平均世代时间。 时间/h 0 0.5 1.0 1.5 2.0 细胞干重/(g/L) 0.10 0.15 0.23 0.34 0.51
多体系统动力学综述
1. 绝对节点坐标法 传统有限元方法建立的单元为非等参数单元,其使用节点处的位移梯度来描述物体的无限小的转动,但在物体发生大变形时,节点处的位移梯度已不能准确描述物体的转动变形,从而极大影响到计算的精度。 Shabana [1]提出了绝对节点坐标法(Absolute nodal coordinate formulation, ANCF ),其理论基础主要是有限元和连续介质力学理论。该方法将物体的单元节点坐标定义在全局坐标系下,使用节点处的斜率(slope)矢量作为节点坐标而不是节点处的无限小转动[2],不需要另外计算刚体位移与柔性变形之间的耦合,能较精确地计算大变形的多体系统动力学问题。其最终推导出的多体系统的微分代数方程组(DAEs )中,质量矩阵是一个常数矩阵,但刚度矩阵将是一个非线性的时间函数。 1.1梁单元的绝对节点坐标法 Shabana 首先推导出一维梁单元的绝对节点坐标法模型[1][3]。在这种模型中,梁单元用中性轴来简化,如图1所示,其上面任意一点P 在全局坐标系下的坐标表达为: 23101232320123r =Se r a a x a x a x r b b x b x b x ??+++??==????+++???? 图1 其中,x 为沿轴线的单元局部坐标,[]0,x l ∈,l 为梁单元初始长度;S 为单元形函数;e 为含有8个单元节点坐标的广义坐标矢量。 123456781102205162e []|,|,|,|, T x x x l x l e e e e e e e e e r e r e r e r ========= 1 2 1 2 304078,,,x x x l x l r r r r e e e e x x x x ====????====????
马氏体相变动力学的深入描述
我们还应注意,在近熔化区的相变硬化区中片状石墨周围的马氏体量不均匀分布,近片状石墨区的马氏体较多,而离石墨片较远区的马氏体较少(图6)。马氏体的这种不均匀分布将说明:近片状石墨 片区合金的含C 量较低,而离石墨片较远区合金的含C 量较高,这种不均匀分布与激光快速加热和激冷情况有关,同时一般激冷速度绝对值大于快速加热速度绝对值,这也已有学者对之作出解释 。 图6 石墨周围的马氏体不均匀分布 Fig 6 Heterogeneous distribution of martensite around graphite 在加热过程中,C 原子从石墨中扩散出来,汽缸套材料是以珠光体P 为基体的,其含C 量为C 共析。近石墨片区含C 量为过共析。在激光停止加热后激冷过程中,过共析部分的C 向石墨进行上坡扩散,并析出在石墨片上。同时因为激冷速度大于加热速度,只有靠近G 片的小区域内含C 量会发生降低。当该区温度降至Ms 点时发生M 转变,因为其含C 量低,故Ms 点相应较高,所以M 针会多些。而离开G 片较远的部位,因含C 量较高,Ms 较低,M 量就较少。4 结论 4.1合金铸铁缸套材料激光熔融热处理后的组织可分为熔化区、半熔化区、相变硬化区和热影响区。4.2熔化区的组织为树枝状先共晶奥氏体Ap 和变态莱氏体共晶L ′d 。 4.3半熔化区组织由等轴状奥氏体,少量残留石墨片和离异莱氏体共晶组成。 4.4相变硬化区可细分为(M +Ar +F +Fe 3C +G )、(M +Ar +Fe 3C +G )和(M +Ar +G )三个亚区。致谢:本课题得到国防科工委国防预研项目的资助,谨此致谢。 参考文献 [1]浜崎正信 实用し-ぜ加工[M ]う? 出版株式会社.[2]胡赓祥、蔡珣主编 材料科学基础[M ]上海交大出版社.2000,372. [3]朱祖昌,俞少罗,大 基明,《热处理》[J ]日本热处理技术协会,34,(6).1994,321.[4]徐祖耀 马氏体相变与马氏体[M ]科学出版社.1999,898.[5]沈阳铸研所等编 球墨铸铁[M ]机械工业出版社. 动 态 马氏体相变动力学的深入描述 Deepgoing Description of Kinetics of Martensitic T ransformation 在论述变温马氏体相变动力学时,人们相当习惯的会提出K oistinen 和Marburger 公式来,其公式如下: X m =1-exp[ α(Ms -Tq )](1)实际上,这公式并不完全符合相当多的实验事实。G.Murry 在《Traitment Thermique 》上载文提出深入描述马氏体相变的动力学公式为: Mx m =Ms -[K (650-Ms )] (2)式中Mx m 为马氏体分数为Xm 时对应的温度;K 为马氏体分数Xm 的函数,即K =f (Xm ),经研究, K =1.67×10-2?Xm 0.55+3.18×10-18?Xm 8.7 (3)系数K 反映了马氏体发生过程中随马氏体量Xm 的增加,转变速度由小逐渐增至最大,以后又将减小的规律。(关于马氏体相变动力学方面的进一步论述,按编辑部计划于下期刊登)?编辑部? —43—《热处理》 2003年第18卷第3期
多体系统动力学简介20081202
多体系统动力学简介
多体系统动力学研究对象——机构 工程中的对象是由大量零部件构成的系统。在对它们进行设计优化与性态分析时可以分成两大类 一类为结构 ——正常工况下构件间没有相对运动(房屋建筑,桥梁等) ——关心的是这些结构在受到载荷时的强度、刚度与稳定 一类为机构 ——系统在运动过程中这些部件间存在相对运动(汽车,飞机起落架。机器人等)——力学模型为多个物体通过运动副连接的系统,称为多体系统 多体系统动力学俄研究的对象——机构(复杂机械系统)
不考虑系统运动起因的情况下研究各部件的位置与姿态及其变化速度和加速度的关系 典型案例:平面和空间机构的运动分析 系统各部件间通过运动副与驱动装置连接在一起 数学模型:各部件的位置与姿态坐标的非线性代数方程,以及速度与加速度的线性代数方程
当系统受到静载荷时,确定在运动副制约下的系统平衡位置以及运动副静反力 典型案例:机车或汽车中安装有大量的弹簧阻尼器,整车设计中必须考虑系统在静止状态下车身的位置与姿态,为平稳性与操纵稳定性的研究打下基础 数学模型:非线性微分代数方程组
讨论载荷和系统运动的关系 研究复杂机械系统在载荷作用下各部件的动力学响应是工程设计中的重要问题 动力学正问题——已知外力求系统运动的问题 动力学逆问题——已知系统运动确定运动副的动反力,是系统各部件强度分析的基础 动力学正逆混合问题——系统的某部分构件受控,当它们按照某已知规律运动时,讨论在外载荷作用下系统其他构件如何运动 数学模型:非线性微分代数方程组
机械系统的多体系统力学模型 在对复杂机械系统进行运动学与动力学分析前需要建立它的多体系统力学模型。对系统如下四要素进行定义: ?物体 ?铰链 ?外力(偶) ?力元 实际工程中的机械系统多体系统力学模型的定义取决于研究的目的 模型定义的要点是以能揭示系统运动学与动力学性态的最简模型为优 性态分析的求解规模与力学模型的物体与铰的个数有关
电极过程动力学
电极过程动力学 一、实验目的 通过对铜电极的阳极极化曲线和阴极极化曲线的测定,绘制出极化曲线图,从而进一步加深对电极极化原理以及有关极公曲线理论知识的理解。通过本实验,熟悉用恒电流法测定极化曲线。 二、实验原理 当电池中由某金属和其金属离子组成的电极处于平衡状态时,金属原子失去电子变成离子获得电子变成原子的速度是相等的,在这种情况下的电极称为平衡电极电位。 电解时,由于外电源的作用,电极上有电流通过,电极电位偏高了平衡位,反应以一定的速度进行,以铜电极Cu|Cu2+为例,它的标准平衡电极电位是+0.337V,若电位比这个数值更负一些,就会使Cu2+获得电子的速度速度增加,Cu失去电子的速度减小,平衡被破坏,电极上总的反应是Cu2+析出; 反之,若电位比这个数值更正一些,就会使Cu失去电子的速度增加,Cu2+获得电子的速度减小,电极上总的反应是Cu溶解。这种由于电极上有电流通过而导致电极离开其平衡状态,电极电位偏离其平衡的现象称为极化,如果电位比平衡值更负,因而电极进行还原反应,这种极化称为阴极极化,反之,若电位比平衡值更正,因而电极进行氧化反应,这种极化称为阳极极化。 对于电极过程,常用电流密度来表示反应速度,电流密度愈大,反应速度愈快。电流密度的单位常用安培/厘米2,安培/米2。 由于电极电位是影响影响电流密度的主要因素,故通常用测定极化曲线的方法来研究电极的极化与电流密度的关系。 一、实验方法及装置 本实验电解液为CuSO4溶液(溶液中CuSO4.5H2O浓度为165g/l,H2SO4 180g/l);电极用φ=0.5mm铜丝作为工作电极,铂片电极作为辅助电极。为了测得不同电流密度下的电极电位,以一个甘汞电极与被测电极组成电池,甘汞电极通过盐桥与被测电极相通,用CHI660B电化学工作站测得不同电流密度下对应的阴极或阳极极化曲线。
动力学主要仿真软件
车辆动力学主要仿真软件 I960年,美国通用汽车公司研制了动力学软件DYNA主要解决多自由度无约束的机械系统的动力学问题,进行车辆的“质量-弹簧-阻尼”模型分析。作为第一代计算机辅助设计系统的代表,对于解决具有约束的机械系统的动力学问题,工作量依然巨大,而且没有提供求解静力学和运动学问题的简便形式。 随着多体动力学的诞生和发展,机械系统运动学和动力学软件同时得到了迅速的发展。1973 年,美国密西根大学的N.Orlandeo 和,研制的ADAM 软件,能够简单分析二维和三维、开环或闭环机构的运动学、动力学问题,侧重于解决复杂系统的动力学问题,并应用GEAR 刚性积分算法,采用稀疏矩阵技术提高计算效率。1977年,美国Iowa 大学在,研究了广义坐标分类、奇异值分解等算法并编制了DADS软件,能够顺利解决柔性体、反馈元件的空间机构运动学和动力学问题。随后,人们在机械系统动力学、运动学的分析软件中加入了一些功能模块,使其可以包含柔性体、控制器等特殊元件的机械系统。 德国航天局DLF早在20世纪70年代,Willi Kort tm教授领导的团队就开始从事MBS软件的开发,先后使用的MBS软件有Fadyna (1977)、MEDYNA1984),以及最终享誉业界的SIMPAC(1990). 随着计算机硬件和数值积分技术的迅速发展,以及欧洲航空航天事业需求的增长,DLR决定停止开发基于频域求解技术的MED YN软件,并致力于基于时域数值积分技术的发展。1985年由DLR开发的相对坐标系递归算法的SIMPACI软件问世,并很快应用到欧洲航空航天工业,掀起了多体动力学领域的一次算法革命。 同时,DLR首次在SIMPAC嗽件中将多刚体动力学和有限元分析技术结合起来,开创了多体系统动力学由多刚体向刚柔混合系统的发展。另外,由于SIMPACI算法技术的优势,成功地将控制系统和多体 计算技术结合起来,发展了实时仿真技术。
晶体生长第七章 晶体生长动力学
第七章 晶体生长动力学 生长驱动力与生长速率的关系(动力学规律或界面动力学规律),先解决生长机制问题。 §1 邻位面生长——台阶动力学 邻位面生长——奇异面上的台阶运动问题 1. 界面分子的势能 1→2 : 2Φ1+8Φ2; 1→3 : 4Φ1+12Φ2; 1→4 : 6Φ1+12Φ2 分子最稳定位置(相变潜热) 单分子相变潜热: l sf =W s +W k ① 流体分子 ⑴ 吸附分子 ⑵ 台阶分子⑶ 扭折 ⑷ 邻位面上不同位置的吸附分子[3] 界面上不同位置的势能曲线 体扩散 面扩散 线扩散
② 流体分子 ⑴ 吸附分子 ⑵ 扭折 ⑷ ③ 流体分子 ⑴ 扭折 ⑷ 2.面扩散 W s =2Φ1+8Φ2 吸附分子→流体需克服的势垒 sf s l 20 1 22≈Φ≈ε 面扩散激活能 υ∥ 吸附分子在界面振动频率 吸附分子在晶面发生漂移的机率为:)/ex p(kT s ε-,面 扩散系数为:D s D s =[υ∥ )/ex p(kT s ε-] 吸附分子平均寿命:τs, s τ1 脱附频率 )/ex p(/1kT W s s -=⊥υτ ) /ex p(1 kT W s s ⊥ = υτ Xs: 吸附分子在界面停留的平均寿命τs 内,由于无规则漂移而在给定方向的迁移(分子无规则漂移的方均根偏差) s s s D X τ=2 (爱因斯坦公式) kT W X s s s 2/]exp[2 1 ε-=∴ 由于对一般的晶面: sf s s l W 45.0≈-ε υ∥=υ⊥ 体扩散 面扩散 体扩散
]/22.0exp[2 1 kT l X sf s ≈∴ Xs 决定了晶体生长的途径。 3. 台阶动力学——面扩散控制 台阶的运动受面扩散控制 界面某格点出现吸附分子的机率:00 N N s s =α 界面N 0,格点Ns 有吸附分子: )/ex p(0 kT W k s -=α (对单原子或简单原子,可忽略取向效应) 若:Xs >> X 0 则到达界面便可到达台阶,扭折 平衡时,脱附分子(单独时间从界面脱附)数为:s s τα1 ? 平衡时,吸附分子数为:s s τα1 ? 0/p p =α 饱和比,在此情况下,吸附分子为: s s ταα1 ? ? Xs >> X 0 则吸附分子均能到达台阶 设台阶长度为a,则单位时间到达台阶的分子数为: a X s s s ???ταα1 20 考虑脱附分子数: a X s s s ???τα1 20
第五章电极过程和电极过程动力学讲解学习
第五章电极过程和电极过程动力学
5.电极过程和电极过程动力学 5.1电化学装置的可逆性:化学反应可逆性;热力学上可逆性 5.2电极的极化 5.3电极过程的控制步骤:电极反应的特点;电极反应的控制步骤5.4电荷转移动力学方程 5.5交换电流密度与电极反应速度常数 5.6稳态极化时的电极动力学方程 5.7浓差极化及其电机动力学方程 5.8化学极化 分解电压E分:在可逆情况下使电解质有效组元分解的最低电压,称为理论分解电压(V e)。理论分解电压是阳极平衡电极电位(εe(A))与阴极平衡电极电位(εe(K))之差。 Ve=εe(A)- εe(K)(10 - 5) 当电流通过电解槽,电极反应以明显的速度进行时,电极反应将会明显偏离平衡状态,而成为一种不可逆状态,这时的电极电位就是不平衡电位,阳极电位偏正,阴极电位偏负。这时,能使电解质熔体连续不断地发生电解反应所必需的最小电压叫作电解质的实际分解电压。显然,实际分解电压比理论分解电压大,有时甚至大很多。
实际分解电压简称分解电压(V),是阳极实际析出电位(ε(A))和阴极析出电位(ε(K))之差。 V=ε(A)- ε(K)(10 - 6) 当得知阴、阳极在实际电解时的偏离值(称为超电位)就可以算出某一电解质的实际分解电压。 分解电压符合能斯特方程,可以表示为如下形式: 式中 E i,E0分别表示实际和标准状态下组元i的分解电压; a i__组元的活度; n i __组元在熔盐中的化合价; F __ 法拉弟常数; 可以看出,温度和电解质组成均会影响分解电压 电极极化
电解时的实际分解电压比理论分解电压要大很多,这是由于电流通过电解槽时,电极反应偏离了平衡状态。通常将这种偏离平衡电极电位的现象称为极化现象。电解过程实际分解电压和理论分解电压之差称为超电压。 ?电解电极反应一般包含1: ?(1)反应离子由熔体向双电层移动并继续经双电层向 电极表面靠近。这一阶段在很大程度上靠扩散实现,扩 散则是由于导电离子在熔体和双电层外界的浓度差别引 起的。 ?(2)反应离子在电极表面进行电极反应前的转化过 程,如表面吸附等; ?(3)在电极上的电子传递 - - 电化学氧化或电化学还 原反应; ?(4)反应产物在电极表面进行反应后的转化过程,例 如自电极表面的脱附,反应产物的复合、分解和其它化 学反应; ?(5)反应产物形成新相,或反应产物自电极表面向电 解质熔体的传递。
柔性多体动力学建模
柔性多体动力学建模 、仿真与控制 近二十年来,柔性多体系统多力学(the dynamics of the flexible multibody systems)的研究受到了很大的关注。多体系统正越来越多地用来作为诸如机器人、机构、链系、缆系、空间结构和生物动力学系统等实际系统的模型。huston认为: “多体动力学是目前应用力学方面最活跃的领域之一,如同任何发展中的领域一样,多体动力学正在扩展到许多子领域。最活跃的一些子领域是: 模拟、控制方程的表述法、计算机计算方法、图解表示法以及实际应用。这些领域里的每一个都充满着研究机遇。”多柔体系统动力学近年来快速发展的主要推动力是传统的机械、车辆、军械、机器人、航空以及航天工业现代化和高速化。传统的机械装置通常比较粗重,且*作速度较慢,因此可以视为由刚体组成的系统。而新一代的高速、轻型机械装置,要在负载/自重比很大,*作速度较高的情况下实现准确的定位和运动,这是其部件的变形,特别是变形的动力学效应就不能不加以考虑了。在学术和理论上也很有意义。 关于多柔体动力学方面已有不少优秀的综述性文章。 在多体系统动力学系统中,刚体部分: 无论是建模、数值计算、模拟前人都已做得相当完善,并已形成了相应的软件。但对柔性多体系统的研究才开始不久,并且柔性体完全不同于刚性体,出现了很多多刚体动力学中不呈遇到的问题,如: 复杂多体系统动力学建模方法的研究,复杂多体系统动力学建模程式化与计算效率的研究,大变形及大晃动的复杂多体系统动力学研究,方程求解的stiff数值稳定性的研究,刚柔耦合高度非线性问题的研究,刚-弹-液-控制组合的复杂多体系统的运动稳定性理论研究,变拓扑结构的多体系统动力学与控,复杂多体系统动力学中的离散化与控制中的模态阶段的研究等等。柔性多体动力学而且柔性多体动力学的发展又是与当代计算机和计算技术的蓬勃发展密切相关的,高性能的计算机使复杂多体动力学的仿真成为可能,特别是计算机的功
晶体生长复习题.doc
1. 简述温度的物理意义。 2. How many atoms of argon at a pressure of one atmosphere are incident on a square centimeter of surface at room temperature in one microsecond? 3. 简要解释晶体的扩散机理有哪两种?1000%时铜在单晶硅中的扩散系数D为10_4cm2/s,而B和P等的扩散系数约为10"14cm2/s,在集成电路制作过程中,如果我们采用1000Q C高温处理,在单晶硅上使B扩散10nm的距离,请估计铜的扩散距离为多少mm? 4. 谈谈你对扩散系数的理解(气体,液体,晶体与非晶的扩散系数有什么不同?扩散系数的大小受哪些因素影响?)请写出扩散方程:Fick第一定律和第二定律的一维表达式。并请写出一维稳态条件下Fick第二定律的表达式及其解。 5. 直径为1nm的金粒子在1000°C,含金1Q/O的玻璃衬底上成核,沉淀粒子基本上是纯金,金在玻璃中的平衡浓度1000°C时为0.1。/。,假设粒子生长是由扩散控制的,1000°C时金在玻璃中的扩散系数为10_w cm2s_1。用球形粒子沉淀的稳态扩散近似计算1小时后金粒子的大小。 6. A Czochralski silicon crystal that is about one meter in length is grown in eight hours, so that a crystal can be grown by a worker in one shift. For a diffusion coefficient in the liquid D=5X l0'5cm2s'1, what is the thickness of the diffusion boundary layer? 7. 晶体熔体生长的温度梯度一般为100°C/cm。保持这样的温度梯度主要通过增加热传导的方式。对于铝,热流量为130W/cm2,氧化铝为20W/cm2, 硅为94 W/cm2,生长直径为12-inch的硅单晶,总热流量为50kW。如果:分凝系数/< = 0.1,液相线斜率m = 1 deg/%C,扩散系数D = 5x10~5 crrP/sec,温度梯度0 = 100°C/cm f 提拉速率v = 1 mm/min = 1/600 cm/sec,请问,不产生组分过冷的临界组分浓度为多少? 8. 位错生长理论模型与Kossel理论模型比较,主要解决了什么问题?根据位错理论模型,过饱和度与晶体生长速率的关系如何? 9. 在熔体中生长晶体,晶体生长速率和过冷度通常是线性关系,采用Czochralski 方法在其熔体中的生长单晶硅的速率约为5x10'5m/sec,体系的过冷度一般为 0.01°C,试求硅单晶生长的动力学系数。 10. 晶体生长动力学主要研究晶体生长的微观过程及其对晶体生长速率的影响。请简要讨论影响晶体生长速率的微观过程有哪些? 11. 如果晶体生长速率由晶体界面动力学过程控制,晶体生长速率与哪些因素有关?写出晶体生长速率的表达式。 12. 什么是stepan Problems?定性描述我们采取什么方法解决stefan Problems? 13. 谈谈你对晶体生长过程中分凝效应理解,分凝系数和有效分凝系数有什么区别。请写出定向凝固方程(scheil方程)并比较与杠杆规则的区别。 14. Crystals that are grown from solution are grown much more slowly, at a rate of perhaps 1 mm/day. For a liquid diffusivity, D=5X 10'5cm2s'1, what is the diffusion length? What does this imply about the concentration in a growth vessel that is 20cm in diameter? 15. the thermal diffusion length is the thermal diffusivity divided by
晶体生长热力学
第一章 晶体生长热力学 晶体生长是一门古老的“艺术”,但最近几十年来,由于热力学、统计物理以及其它学科在晶体生长中的应用,对解决晶体生长问题发挥了很大的作用,使晶体生长获得了牢固的科学基础,逐步发展成为材料科学中的一个重要分支,对解决工业与科研所需的材料问题做出了重要的贡献。因此,要想了解核掌握晶体生长这门学科,首先必须掌握热力学的基本知识。 晶体生长是一个动态过程,不可能在平衡状态下进行,而热力学所处理的问题一般都是属于平衡状态的问题。在研究任何过程的动力学问题之前,对其中所包含的平衡问题有所了解,则可以预测过程中所遇到的问题(如偏离平衡态的程度),以及说明或提出解决问题的线索。因而在考虑实际晶体生长情况时,必须确定问题的实质究竟是与达到的平衡状态有关,还是与各种过程进行的速率有关。如果晶体生长的速率或晶体的形态取决于某一过程进行的速率(例如,在表面上的成核速率),那么就必须用适当的速率理论来分析,这时热力学就没有什么价值了。但如果过程进行程度非常接近于平衡态(准平衡态,这在高温时常常如此),那么热力学对于预测生长量以及成分随温度、压力和试验中其它变数而改变的情况,就有很大的价值。 可以认为晶体生长是控制物质在一定的热力学条件下进行的相变过程。通过这一过程使该物质达到符合所需要的状态和性质。一般的晶体生长多半是指物质从流动相转变为固相(成为单晶体)的过程。因此将牵涉到热力学中的相平衡和相变的问题。相图(平衡图)是将物质体系中各项可能存在的状态,随成分和温度(有时还有压力)改变的情况明确地表现出来的一种图示。也可以认为相图是将晶体生长(流体相变为固相以及固态中的相变)与热力学联系起来的媒介,可以看出整个晶体生长过程的大概趋势。 §1.1相平衡及相变 相:是指体系中均匀一致的部分,它与别的部分有明显的分界线。 1.1.1热平衡 在与环境无热量和物质交换的体系内,A 与B 两相间只有热量交换条件下,T A =T B 推导方法: 设将A 和B 两个相封闭在一个与环境隔绝的体系内,A 与B 两相间只有热量交换,即A ,B 两相见得隔板完全固定,只能导热,如图1.1所示。设此时从A 有微量的热传到B 内,则A ,B 两相的内能变化为 A A A A A B B B B B dU T dS P dV dU T dS P dV =-=- (1.1) 由于隔板固定,A,B 两相的体积也固定,0A B dV dV ==。这说明此时体系内能的变化只能表现为热的改变,即 A B Q dU dU δ=-= 这里假定由A 传至B 时,对B 相来说,Q δ为正,反方向为负。式(1.1)可写为 /A A Q T dS δ-=,/B B Q T dS δ-= (1.2) 两式相加,得
柔性多体系统动力学讲稿(theory)
多体动力学 摘要 采用笛卡尔绝对坐标通过动静法建立多刚体系统的动力学方程。 目录 I 问题概述 (3) 1. 多体系统仿真模型 (3) 2. 静力学问题 (4) 3. 运动学问题 (4) 4. 动力学问题 (4) II 基本概念和公式 (4) 5. 参照物 (4) 6. 矢量 (5) 6.1 矢量的定义及符号 (5) 6.2 矢量的基本运算 (5) 6.3 单位矢量的定义及符号 (6) 6.4 零矢量的定义及符号 (6) 6.5 平移规则 (6) 7. 坐标系 (7) 8. 矢量在坐标系内的表示 (8) 9. 方向余弦矩阵 (10) 10. 欧拉角 (13) 11. 刚体的位置和姿态坐标 (15) 12. 矢量在某参照物内对时间的导数 (16) 13. 角速度 (17) 14. 简单角速度 (17) 15. 刚体上固定矢量在某参照物内对时间的导数 (18) 16. 矢量在两参照物内对时间导数的关系 (20) 17. 角速度叠加原理 (21) 18. 角加速度 (22) 19. 角速度与欧拉角对时间导数的关系 (23) 20. 动点的速度和加速度 (25) 21. 刚体上两固定点的速度与加速度 (26) 22. 相对刚体运动的点的速度和加速度 (27) 23. 并矢 (28) 24. 刚体惯性力向质心简化的主矢和主矩 (30) 25. 约束 (33) 25.1滑移铰 (34) 25.2 旋转铰 (34) 25.3 圆柱铰 (35) 25.4 球铰 (36) 25.5 平面铰 (36) 25.6 固定铰 (37) 25.7 点在线约束 (37) 25.8 点在面约束 (38) 25.9 姿态约束 (39) 25.10 平行约束 (39) 25.11垂直约束 (40) 25.12 等速万向节 (41) 25.13 虎克铰 (41) 25.14 万向节 (42) 25.15 关联约束 (43) 26. 弹簧力的计算 (45)
【免费下载】第四章微生物反应动力学
习题与答案2.简要回答微生物反应与酶促反应的最主要区别?答:微生物反应与酶促反应的最主要区别在于,微生物反应是自催化反应,而酶促反应不是。此外,二者还有以下区别: (1)酶促反应由于其专一性,没有或少有副产物,有利于提取操作,对于微生物反应而言,基质不可能全部转化为目的产物,副产物的产生不可避免,给后期的提取和精制带来困难,这正是造成目前发酵行业下游操作复杂的原因之一。(2)对于微生物反应,除产生产物外,菌体自身也可是一种产物,如果其富含维生素或蛋白质或酶等有用产物时,可用于提取这些物质。(3)与微生物反应相比,酶促反应体系较简单,反应过程的最适条件易于控制。微生物反应是利用活的生物体进行目的产物的生产,因此,产物的获得除受环境因素影响外,也受细胞因素的影响,并且微生物会发生遗传变异,因此,实际控制有一定难度。 (4)酶促反应多限于一步或几步较简单的生化反应过程,与微生物反应相比,在经济上有时并不理想。4.Monod 方程建立的几点假设是什么?Monod 方程与米氏方程主要区别是什么?答:Monod 方程建立的基本假设:微生物生长中,生长培养基中只有一种物质的浓度(其他组分过量)会影响其生长速率,这种物质被称为限制性基质,并且认为微生物为均衡生长且为简单的单一反应。Monod 方程与米氏方程的主要区别如下表所示: Monod 方程与米氏方程的区别Monod 方程:S K S S +=max μμ米氏方程:S K S r r m +=max 经验方程理论推导的机理方程方程中各项含义:μ:生长比速(h -1)μmax :最大生长比速(h -1)S: 单一限制性底物浓度(mol/L) K S :半饱和常数(mol/L)方程中各项含义:r :反应速率(mol/L.h)r max :最大反应速率(mol/L.h)S :底物浓度(mol/L)K m :米氏常数(mol/L)适用于单一限制性基质、无抑制的微生物反应。适用于单底物、无抑制的酶促反应。 5.举例简要说明何为微生物反应的结构模型?而且高中资中资料料试卷置时
晶体生长理论
晶体生长理论 晶体生长理论是用以阐明晶体生长这一物理-化学过程。形成晶体的母相可以是气相、液相或固相;母相可以是单一组元的纯材料,也可以是包含其他组元的溶液或化合物。生长过程可以在自然界中实现,如冰雪的结晶和矿石的形成;也可以在人工控制的条件下实现,如各种技术单晶体的培育和化学工业中的结晶。 基础 晶体生长的热力学理论[1]J.W.吉布斯于1878年发表的著名论文《论复相物质的平衡》奠定了热力学理论的基础。他分析了在流体中形成新相的条件,指出自然体自由能的减少有利新相的形成,但表面能却阻碍了它。只有通过热涨落来克服形成临界尺寸晶核所需的势垒,才能实现晶体的成核。到20世纪20年代M.福耳默等人发展了经典的成核理论,并指出了器壁或杂质颗粒对核的促进作用(非均匀成核)。一旦晶核已经形成(或预先制备了一块籽晶),接下去的就是晶体继续长大这一问题。吉布斯考虑到晶体的表面能系数是各向异性的,在平衡态自由能极小的条件就归结为表面能的极小,于是从表面能的极图即可导出晶体的平衡形态。晶体平衡形态理论曾被P.居里等人用来解释生长着的晶体所呈现的多面体外形。但是晶体生长是在偏离平衡条件下进行的,表面能对于晶体外形的控制作用限于微米尺寸以下的晶体。一旦晶体尺寸较大时,表面能直接控制外形的能力就丧失了,起决定性作用的是各晶面生长速率的各向异性。这样,晶面生长动力学的问题就被突出了。 动力学理论 晶体生长的动力学理论晶面生长的动力学指的是偏离平衡的驱动力(过冷或过饱和)与晶面生长的速率的关系,它是和晶体表面的微观形貌息息相关的。从20世纪20年代就开始了这方面的研究。晶面的光滑(原子尺度而言)与否对生长动力学起了关键性的作用。在粗糙的晶面上,几乎处处可以填充原子成为生长场所,从而导出了快速的线性生长律。至于偏离低指数面的邻位面,W.科塞耳与 F.斯特兰斯基提出了晶面台阶-扭折模型,晶面上台阶的扭折处为生长的场所。由此可以导出相应的生长律。至于光滑的密集平面(这些是生长速率最低,因而在晶体生长中最常见的),当一层原子填满后,表面就没有台阶提供继续填充原子的场所,则要通过热激活来克服形成二维晶核的势垒后,方能继续生长。这样,二维成核率就控制晶面生长速率,导出了指数式的生长律。只有在甚高的驱动力(例如过饱和度达50%)作用下方可观测到生长。但实测的结果与此推论有显著矛盾。为了解释低驱动力作用下光滑晶面的生长,F.C.夫兰克于1949年提出螺型位错在晶面露头处会形成永填不满的台阶,促进晶面的生长。在晶体生长表面上观测到的螺旋台阶证实了夫兰克的设想。在W.伯顿、N.卡夫雷拉与夫兰克1951年题为《晶体生长与表面平衡结构》这一重要论文中,对于理想晶体和实际晶体的晶面生长动力学进行了全面的阐述,成为晶体生长理论发展的重要里程碑。
机械系统动力学
机械系统动力学报告 学院:机械工程学院 专业:机械电子工程 姓名: 学号:
机械系统动力学 1 机械系统动力学简介 随着现代工业对机械设备及机械传动系统的要求越来越高,机械设备及机械传动系统向着大型化、高速化、轻量化、构件柔性化方向发展。人们对生产率的不断追求,使得机械的运转速度不断提高;与此同时,人们总是希望使用的机器轻巧一些,材质的改善使得构件的截面可以设计得更小一些,这样就减轻了重量、节省了材料;速度高了使得机器中的惯性力增大,截面小了使得构件的柔性加大,这样使得系统更容易产生振动,振动降低了机械的精度和寿命,恶化了劳动条件。 由于动力学研究的复杂性,人们常常引入一些假定,使问题的研究过程简化。随着生产实践的发展对动力学分析的准确度提出了新的要求;而科学技术的发展又为动力学分析提供了新的理论和分析手段。动力学的发展趋势是:逐步将这些假定抛弃,使得分析更接近客观实际。 对于低速机械,运动中产生的惯性力可以忽略不计。随着机械速度的提高,惯性力不能再被忽略,此时可根据达朗伯原理将惯性力加入静平衡方程进行求解,这种方法就称为动态静力方法。 为了求出惯性力,就必须知道构件的加速度。因此在动态静力分析之前首先要进行运动学分析,而在运动学分析时总是假定构件是按某一给定的理想运动规律运动,多数驱动构件均被假定做等速回转运动。由于采用了等速回转这一假定,在动态静力分析中便不涉及原动机的特性,因而,着本质上是一种理想运动状态下的力学分析。现在在许多速度较高的机械中,用动态静力分析代替了静力分析。 在力的作用下,机械很难维持“驱动件等速回转”这种假定。尽管这种假定在许多情形下是允许的,但在实际运动中常常需要知道系统的真实运动规律,因而进行动力分析就是求出在外力作用下系统的真实运动,用于解决动力学的正问题。由于分析的对象是整个机械系统,所以又称为机械系统动力学。 在高速情况下,动态精度与静态精度有很大的区别。精密机床的动态性能研究、高速间歇机构的动态定位精度研究就是这样发展起来的。 高速旋转机械可以采用静态设计,制造出来后通过动平衡减少振动,还要使运转速度避开临界转速。但是,随着转速的进一步提高和柔性转子的出现,就必须采取全方位的综合措施,不仅在设计时要进行认真的动力学分析,而且在运行过程中
第四章微生物反应动力学
习题与答案 2.简要回答微生物反应与酶促反应的最主要区别? 答:微生物反应与酶促反应的最主要区别在于,微生物反应是自催化反应,而酶促反应不是。此外,二者还有以下区别: (1)酶促反应由于其专一性,没有或少有副产物,有利于提取操作,对于微生物反应而言,基质不可能全部转化为目的产物,副产物的产生不可避免,给后期的提取和精制带来困难,这正是造成目前发酵行业下游操作复杂的原因之一。 (2)对于微生物反应,除产生产物外,菌体自身也可是一种产物,如果其富含维生素或蛋白质或酶等有用产物时,可用于提取这些物质。 (3)与微生物反应相比,酶促反应体系较简单,反应过程的最适条件易于控制。微生物反应是利用活的生物体进行目的产物的生产,因此,产物的获得除受环境因素影响外,也受细胞因素的影响,并且微生物会发生遗传变异,因此,实际控制有一定难度。 (4)酶促反应多限于一步或几步较简单的生化反应过程,与微生物反应相比,在经济上有时并不理想。 4.Monod 方程建立的几点假设是什么?Monod 方程与米氏方程主要区别是什么? 答:Monod 方程建立的基本假设:微生物生长中,生长培养基中只有一种物质的浓度(其他组分过量)会影响其生长速率,这种物质被称为限制性基质,并且认为微生物为均衡生长且为简单的单一反应。Monod 方程与米氏方程的主要区别如下表所示: Monod 方程与米氏方程的区别 Monod 方程:S K S S +=max μμ 米氏方程:S K S r r m += max 经验方程 理论推导的机理方程 方程中各项含义: μ:生长比速(h -1) μmax :最大生长比速(h -1 ) S: 单一限制性底物浓度(mol/L) K S :半饱和常数(mol/L) 方程中各项含义: r :反应速率(mol/L.h) r max :最大反应速率(mol/L.h) S :底物浓度(mol/L) K m :米氏常数(mol/L) 适用于单一限制性基质、无抑制 的微生物反应。 适用于单底物、无抑制的酶促反应。 5.举例简要说明何为微生物反应的结构模型? 答:由于细胞的组成是复结的,当微生物细胞内部所含有的蛋白质、脂肪、碳水化合物、