智能汽车系统模糊方向控制的分析

《电子技术应用》2018年第44卷第9期?基金项目:国家自然科学基金项目(61371176)
0引言
5G 技术在近些年已经获得了较好的发展和应用。在智能驾驶领域,5G 的大带宽和低时延为实现无人驾
驶汽车端到端控制需要处理的超大数据量提供了可能。
近年来,无人驾驶汽车正以迅猛的速度发展,其涵盖了
工程控制、信息与通信、模式识别、传感技术、电气工
程、计算机等多个学科,是当下智能交通的重要解决方
案之一[1]。在实际的实际道路环境中,智能汽车的控制端需要与传感设备采集到的诸多信息进行大量的数据交换,并
进行实时处理以得到控制输出。
目前许多智能汽车道路识别算法都依赖于找到道
路的实际中线,并根据其与理想中线的误差来控制智能
汽车方向。位置随动系统是一个不具有精确数学模型的系统,采用常规控制方法较复杂且效果不佳[2]。此外,随
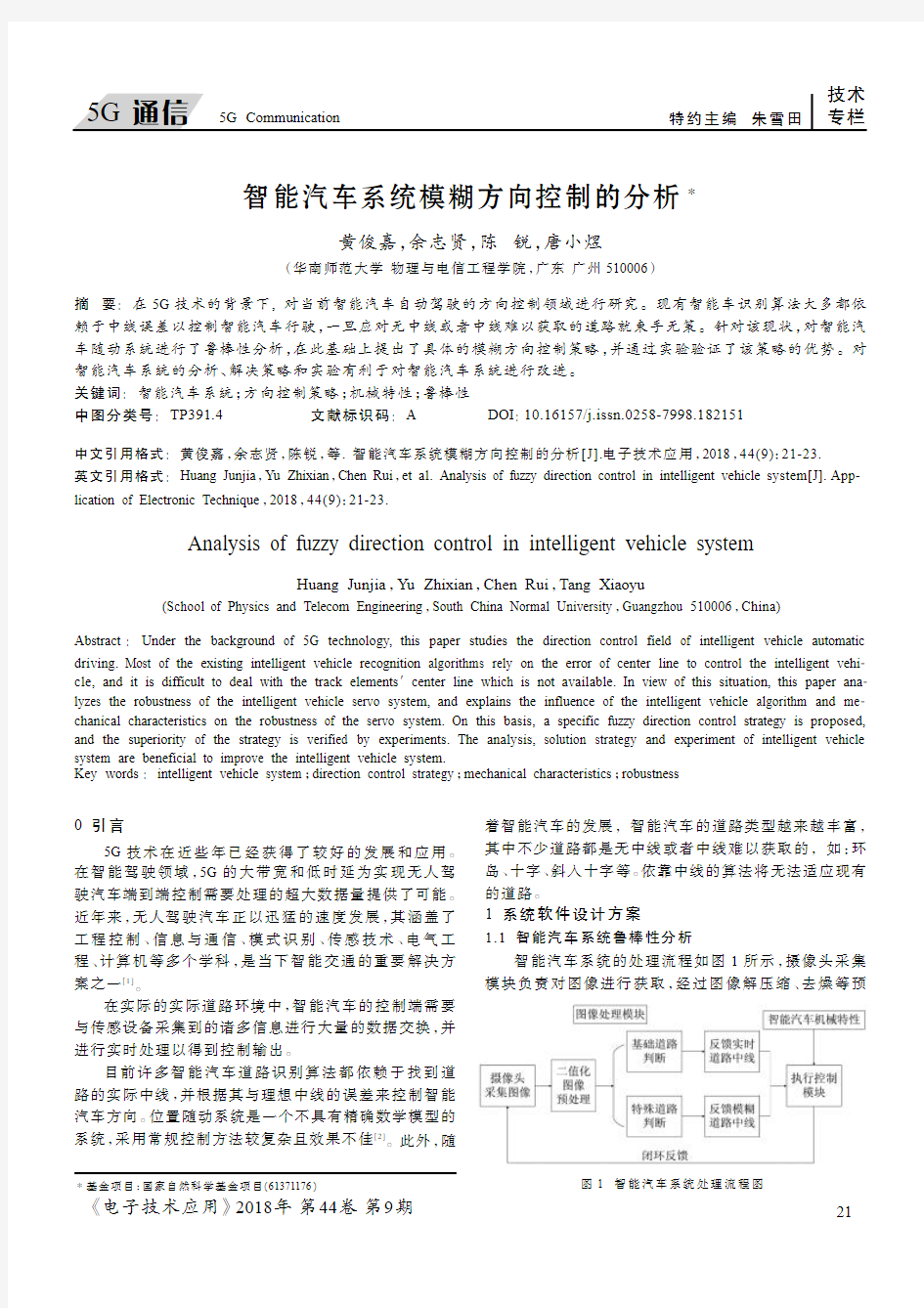
着智能汽车的发展,智能汽车的道路类型越来越丰富,其中不少道路都是无中线或者中线难以获取的,如:环岛、十字、斜入十字等。依靠中线的算法将无法适应现有的道路。1系统软件设计方案1.1智能汽车系统鲁棒性分析智能汽车系统的处理流程如图1所示,摄像头采集模块负责对图像进行获取,经过图像解压缩、去燥等预
智能汽车系统模糊方向控制的分析?
黄俊嘉,余志贤,陈锐,唐小煜
(华南师范大学物理与电信工程学院,广东广州510006)摘要:在5G 技术的背景下,对当前智能汽车自动驾驶的方向控制领域进行研究。现有智能车识别算法大多都依赖于中线误差以控制智能汽车行驶,一旦应对无中线或者中线难以获取的道路就束手无策。针对该现状,对智能汽车随动系统进行了鲁棒性分析,在此基础上提出了具体的模糊方向控制策略,并通过实验验证了该策略的优势。对智能汽车系统的分析、解决策略和实验有利于对智能汽车系统进行改进。
关键词:智能汽车系统;方向控制策略;机械特性;鲁棒性
中图分类号:TP391.4文献标识码:A DOI :10.16157/j.issn.0258-7998.182151
中文引用格式:黄俊嘉,余志贤,陈锐,等.智能汽车系统模糊方向控制的分析[J].电子技术应用,2018,44(9):21-23.英文引用格式:Huang Junjia ,Yu Zhixian ,Chen Rui ,et al.Analysis of fuzzy direction control in intelligent vehicle system[J].App-
lication of Electronic Technique ,2018,44(9):21-23.Analysis of fuzzy direction control in intelligent vehicle system
Huang Junjia ,Yu Zhixian ,Chen Rui ,Tang Xiaoyu
(School of Physics and Telecom Engineering ,South China Normal University ,Guangzhou 510006,China)
Abstract :Under the background of 5G technology,this paper studies the direction control field of intelligent vehicle automatic driving.Most of the existing intelligent vehicle recognition algorithms rely on the error of center line to control the intelligent vehi ?cle,and it is difficult to deal with the track elements ′center line which is not available.In view of this situation,this paper ana ?lyzes the robustness of the intelligent vehicle servo system,and explains the influence of the intelligent vehicle algorithm and me ?chanical characteristics on the robustness of the servo system.On this basis,a specific fuzzy direction control strategy is proposed,and the superiority of the strategy is verified by experiments.The analysis,solution strategy and experiment of intelligent vehicle system are beneficial to improve the intelligent vehicle system.Key words :intelligent vehicle
system ;direction control strategy ;mechanical characteristics ;robustness 图1智能汽车系统处理流程图21
智能小车制作入门篇
智能小车制作入门篇 最近接触了很多机器人爱好者,很多人都对机器人技术展示出了浓厚的兴趣,也在计划如何动手制作自己的第一个机器人。但是似乎很多的人都摸不到门路,只能是站在大门外满怀兴趣的向内观望,观望了一阵兴趣渐失只好叹口气走开…… 很多初学者可能都是看了一些视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作机器人的念头,很多人可能并不是嵌入式开发的业内人士,甚至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手的感觉。有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄像头来读取环境信息,可以语音识别,最好还可以变形…… :—(
我的意见是:新手最好还是老老实实的从小车开始吧。人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的。一个人形机器人的成型产品最少要卖到几千块——要知道,你在开发过程中是不可能没有错误投入的。机器人小车技术上门槛较低,资金投入也少,市场上的各种产品和零配件的支持也较多,虽然简单,但可以实现的功能可一点也不少。 我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知识和一些动手经验。 那么现在我们开始,首先是理论部分——小车的控制结构。 [一]小车的整体控制系统 小车是怎么来控制的?为什么小车判断出障碍物后可以自动的绕开? 理论:控制工程——处理自动控制系统各种工程实现问题的综合性工程技术。包括对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程。它是在电气工程和机械工程的基础上发展起来的。 闭环控制:闭环控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统。 开环控制:开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精确度不高,使用于对系统稳定性精确度要求不高的简单的系统。 一般稍微复杂一点的机器人小车都是闭环控制,也就是说它有一个反馈机制,会根据自己配备的各种传感器来读取环境信息,并且根据这些环境信息来决定自己下一步的行动,决定好后将行动指令发给执行系统,使机器人做出合适的动作。当然也有的机器人小车是开环控制,我就见过一个机器人小车配了一支笔,将机器人放在纸上,机器人一转,刷的一下在纸上画出一个圈来,当然由于摩擦力和机械误差等原因,画出来的圆圈可能不闭合,也可能不圆。不过人家阿Q都说了:“孙子才画的圆呢……” 有点迷糊?没关系,其实简单一点说就是这样:机器人可以分为三部分——传感器部分、控制器部分、执行器部分。
智能家居系统需求分析
智能家居系统 1 智能家居整体系统的功能分析 背景和系统结构图的介绍 智能家居又称住宅智能化,是智能建筑的重要组成部分。它随着科技的高速发展和人们生活要求的不断提高而应运而生,成为21世纪的热点技术。智能家居可以定义为一个过程或者一个系统,该过程(系统)利用先进的计算机技术、网络通信技术、综合布线技术构建与家居生活有关的各种子系统,并将其有机结合在一起,通过统筹管理,将智能家居的被动静止结构转变为具有智慧的新动态,为住户生活提供全方位的信息交换功能,帮助家庭和外部、使用者与家庭环境之间保持信息交流畅通,优化人们的生活方式。 图1为智能家居的系统结构图,该图列举了典型智能家居的系统组成:家庭网关、电动窗帘和门窗系统、家庭智能照明系统、家庭多媒体系统、可视门禁系统、安防周界系统、环境温度控制系统、视频监控系统等,其中家庭网关是智能家居系统的通信管理单元和子系统控制中心,在家庭网关通信管理体系下,可构建家庭网络通信系统。 图1 智能家居系统结构图 通过采用上述功能系统,实现家居智能化和自动化。相对传统家居而言,智能家居通
过全新的3C技术(Computer Communication Control Technology),提供了全方位的信息服务,赋予了家居生活安全、舒适、节能的特性。 设计原则 (1)功能需求。智能家居注重满足人们在方便性和舒适度方面的需求,如:遥控功能(遥控控制家居范围内所有的灯,窗帘及其他电气设备),网络化控制、场景控制,本地控制等。 (2)高性价比。在系统设计中要充分考虑系统的性能和价格的要求,使系统在较低成本的条件下,尽可能满足用户需求。 (3)通用性。目前所有的智能家居技术都处于发展阶段,所以系统设计时,要注意选择兼容性好,符合国际通用协议的技术。 (4)兼容性和可扩展性。随着智能家居技术的不断发展,会有越来越多的家居智能化产品和技术的诞生,因此,在智能家居系统的设计之初,就必须考虑系统未来的兼容和发展。 (5)布线简洁。易于安装,符合大多数人的习惯。 (6)安全性。包括所进行设计运行过程的安全性和耐久性。 基于以上原则,才能设计出一套完整的智能家居系统。 设计依据 设计依据主要有: 《全国住宅小区智能化技术示范工程建设要点与技术导则》 《住宅小区安全技术防范综合报警服务系统设计导则》 《社会公共安全标准汇编》 《防盗安全门通用技术条件》(GB17565—2007) 《民用建筑电气设计规范》(JGJ/T 16—2008) 《安全防范工程程序要求》(GA/T 75—1994) 《家庭布线标准》(TIA/EIA 570—A) 《计算机软件开发规范》(GB 8566—1988) 《电气装置安装工程施工及验收规范》(GBJ 232—1982) 《建筑智能化系统工程实施及验收规范》(DB 32/366—1999) 《建筑智能化系统工程评估标准》(DB 32/T367—1999)
智能汽车技术发展及研究现状
学科(车辆)方向讲座报告 题目:智能汽车技术发展及研究现状 姓名: 学号: 专业:车辆工程 任课老师: 2014年6月30日
智能汽车技术发展及研究现状 摘要:智能车辆作为智能交通系统的重要组成部分,能够提高驾驶安全性,大幅改善公路交通效率,降低能源消耗量,该技术的研究日益受到国内外学者的关注。因此,本文综述世界智能车辆行驶安全保障技术研究进展,重点介绍世界主要发达国家智能车辆关键技术的应用和发展计划,分析智能车辆关键技术当前应用现状并展望今后的发展趋势,对我国汽车产业的发展提供前沿资料。 关键字:智能车辆能源消耗安全技术发展计划 1.绪论 智能车辆(Intelligent vehicles)是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的高新技术综合体。它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。作为智能交通系统的一个重要组成部分,智能车辆系统利用传感器技术、信号处理技术、通讯技术、计算机技术等,辨识车辆所处的环境和状态,并根据各传感器所得到的信息做出分析和判断,或者给司机发出劝告和报警信息,提请司机注意规避危险;或者在紧急情况下,帮助司机操作车辆(即辅助驾驶系统),防止事故的发生,使车辆进入一个安全的状态;或者代替司机的操作,实现车辆运行的自动化。 智能车辆系统的引入,可以提高交通的安全性和道路的利用率。目前,在汽车、卡车、公交系统、工业及军用等领域,智能车辆系统都得到了应用,而且应用的多样性和领域还在不断增加。可以预言,随着信息采集技术、信息处理技术、系统工程技术等相关技术的研究和发展深入,智能车辆系统将是智能交通系统研究和发展的重要领域。下面就对智能汽车关键技术的发展和研究现状进行综述。 2.世界智能汽车的发展概况 各国在发展智能汽车技术时的侧重点并不完全形同。美国更强调系统的观点,过去的十几年,美国将注意力放在道路上,把数千万美元投入到先进的车路系统上。而日本则关注较近期的应用,将安全保障技术逐步添加到汽车上,使汽车逐步智能化,这样,不管智能公路是否如期建成,都可以逐步提高汽车的安全性,并且给汽车制造商带来丰厚的利润。对美国和日本的智能汽车发展框架进入深入研究会深切体会到这种差别。事实上,在智能汽车关键技术的应用研究领域,世界各国都在投入大量财力和人员进行研究,各国正在实施或已完成的智能车辆研究项目如图1所示。 图1. 世界智能汽车研究项目概况
车辆智能控制技术的研究与应用
车辆智能控制技术的研究与应用 车辆1003 20104043 李琳
车辆智能控制技术的研究与应用 自从汽车被发明以来,人类对于驾驶汽车的看法就一直存在分歧,一部分人热衷于让汽车变得越来越好开,强调驾驶乐趣,让你的双手舍不得离开方向盘;然而另一部分人则更热衷于让汽车变得越来越“傻瓜化”,甚至要将驾驶者的双手从方向盘上解放出来……上世纪80年代开始热播的美剧《霹雳游侠》当中的KITT,正是后者思想的集大成者。正在读这篇文章的您也许就曾经被无敌的KITT 所深深吸引吧?当然人类的科技还根本无法达到科幻电视剧当中的效果,KITT 无与伦比的人工智能、让主人公高枕无忧的自动驾驶、车身超级耐打击的能力以及几乎不用加油的动力科技看上去几乎都是天方夜谭。然而随着汽车技术的发展,现实版“KITT”正在向人们走来,近些年来许多厂商都致力于无人自动驾驶技术的研发,宝马在这领域走在时代的前边。 现阶段的技术成果虽然无法实现《霹雳游侠》或者《钢铁侠》里面那样强大的技术,但是让车子短暂脱离驾驶员的控制而自主驾驶,还是已经成功实现了。宝马将一系列最先进的无人驾驶技术设备集成到了一辆看似非常普通的5系轿车里,这些设备能够在高速公路行驶时,接管驾驶员的所有操作,自主进行油门、刹车甚至超车的动作。 车辆自主变线超车 借助布置在车身四周的传感器,它甚至可以发现从辅路匝道进入主干道的车辆,自主采取加减速或者变道的措施,而具体选择那种操作,也是通过计算当时的行驶条件而决定的,也就是说它具备了自主判断交通状况的能力。而这一切,目前都能够在130km/h以下的车速来完成。
其实这些对于驾驶员来说再容易不过的驾驶操作,对于自动驾驶系统来说可是超级复杂的一件事情。车辆不仅需要随时准确侦测出自己处于道路中的哪一条车道上,更要认出车身周边的车辆或者物体。实现这样的感知,不仅需要普通雷达,更需要激光、超声波以及摄像头的辅助。 若要精确做出判断,上述的集中探测装置至少需要两种协同作用。目前这辆能够自主驾驶的宝马5系轿车已经在驾驶员极少干预的前提下,安全行驶了3000英里。这都要归功于全车所有精良的设备。再有一点就是,这项技术的应用普及速度可能远超过你的想象,有消息称该技术在2014年的宝马i3上就会开始搭载,届时你可要分清路上开车的到底是人还是车自己了。然而一向强调给驾驶者带去驾驶乐趣的宝马开发这么一个产品,缺失会让人觉得有些意外,宝马官方给出的解释是,这项技术并不会完全将驾驶者从眼观六路耳听八方中抽离开来,所以不要指望你能在开车上班的路上睡上一觉…… 1 悬架的研究方法 (1)理论研究[1] 悬架系统的理论研究具有前瞻性和探索性,为智能悬架系统的物理实现奠定理论基础。其主要研究内容: a.悬架力学模型理论研究。悬架力学模型是振动理论中的隔振和减振理论的实际应用,通过振动理论的深入研究,全面综合研究悬架的减振和隔振性能、悬挂系统的非线性特性。 未来几年中,动力学、振动与控制领域的下述研究前沿值重视:①高维非
智能控制问答题终极版
1-1 智能控制系统由哪几部分组成?各部分的作用是什么? 答:六部分组成:执行器、传感器、感知信息处理、规划与控制、认知和通信接口。 1、执行器是系统的输出,对外界对象发生作用。 2、传感器产生智能系统的输入,传感器用来监测外部环境和系统本身的状态。传感器向感知信息处理单元提供输入。 3、感知信息处理,将传感器得到的原始信息加以处理,并与内部环境模型产生的期望信息进行比较。 4、认知主要用来接收和存储信息、知识、经验和数据,并对他们进行分析、推理作出行动的决策,送至规划和控制部分。 5、通信接口除建立人机之间的联系外,还建立系统各模块之间的联系。 6、规划和控制是整个系统的核心,它根据给定的任务要求,反馈的信息,以及经验知识,进行自动搜索,推理决策,动作规划,最终产生具体的控制作用。 1-2 智能控制系统的特点是什么? 答:1、智能控制系统一般具有以知识表示的非数学广义模型和以数学模型表示的混合控制过程。 2、智能控制器具有分层信息处理和决策机构。 3、智能控制器具有非线性和变结构特点。 4、智能控制器具有多目标优化能力。 5、智能控制器能够在复杂环境下学习。 从功能和行为上分析,智能控制系统应具备以下一条或几条功能特点: 1、自适应功能 2、自学习功能 3、自组织功能 4、自诊断功能 5、自修复功能 1-3 智能控制与传统控制相比较有什么不同?在什么场合下应该选用智能控制策略? 答:(1)不同点:1、涉及的范围:智能控制的范围包括了传统控制的范围。有微分/差分方程描述的系统;有混合系统(离散和连续系统混合、符号和数值系统混合、数字和模拟系统混合)。2、控制的目标:智能的目标寻求在巨大的不确定环境中,获得整体的优化。因此,智能控制要考虑:故障诊断、系统重构、自组织、自学习能力、多重目标。3、系统的结构:控制对象和控制系统的结合。 (2)在什么场合下应该选用智能控制策略。说法一:主要针对控制对象及其环境、目标和任务的不确定性和复杂性的系统。说法二:主要针对无法获得精确的数学模型、无法解决建模问题、假设条件与实际不相吻合的系统。2-11 模糊逻辑控制器由哪几部分组成?各完成什么功能? 答:(1)组成:输入量模糊化接口、知识库(数据库和规则库)、推理机、输出解模糊接口四部分。(2)功能:1、模糊化接口测量输入变量和受控系统的输出变量,并把它们映射到一个合适的响应论域的量程,然后精确的输入数据被变换为适当的语言值或模糊集合的标示符。2、知识库涉及应用领域和控制目标的相关知识,它由数据库和语言控制规则库组成。数据库为语言控制规则的论域离散化和隶属函数提供必要的定义。语言控制规则标记控制目标和领域专家的控制策略。3、推理机是模糊控制系统的核心,以模糊概念为基础,模糊控制信息可以通过模糊蕴涵和模糊逻辑的推理规则来获取,并可以实现拟人决策过程。根据模糊输入和模糊控制规则,模糊推理求解模糊关系方程,获取模糊输出。4、模糊决策接口起到模糊控制的推断作用,并产生一个精确的或非模糊的控制作用。此精确控制作用必须进行逆定标,这一作用是在对受控过程进行控制之前通过量程变换实现的。 模糊控制器的结构组成和作用:一、模糊化接口测量输入变量和受控系统的输出变量,并把它们映射到一个合适的响应论域的量程。二、知识库为语言控制规则的论域离散化和隶属函数提供必要的定义。 三、推理机根据模糊输入和模糊控制规则,模糊推理求解模糊关系方程,获得模糊输出。四、模糊判决接口起到模糊控制的推断作用,并产生一个精确的或非模糊的控制作用。 2-12 模糊逻辑控制器常规设计的步骤怎样?应该注意哪些问题? 答:(1)原则性步骤:1、定义输入输出变量2、定义所有变量的模糊化条件3、设计控制规则库4、设计模糊推理机构5、选择精确化策略的方法 (2)常规设计方法:查表法。步骤:1、确定模糊控制器的输入输出变量2、确定各输入输出变化量的变化范围、量化等级和量化因子3、在各输入输出语言变量的量化域内定义模糊子集4、模糊控制规则确定5、求模糊控制表 (3)注意的问题:1、在定义输入和输出变量时,要考虑到软件实现的限制,一般用于小于10个输入变量时,软件推理还能应付,但当输入变量的数目再增加时,就要考虑采用专用模糊逻辑推理集成芯片。 2、确定模糊控制规则的原则是必须保证控制器的输出能够使系统输出响应的动静态特性达到最佳。 补充1 模糊集合:定义实际上是将经典集合论中的特征函数表示扩展到用隶属度函数来表示。 补充2 隶属度函数:模糊集合的特征函数,实质上反映的事物的渐变性。
智能家居家电控制系统系统设计说明
xx家电控制系统设计说明 一、定义 智能家居又称智能住宅,在国外常用Smart Home表示。与智能家居含义近似的有家庭自动化(HomeAutomation)、电子家庭(ElecctronicHome、E-home)、数字家园(DigitalFamily)、家庭网络(Home Net/Networks for ome)、网络家居(Network Home)、智能家庭/建筑 (IntelligentHome/Building),在我国香港和台湾等地区,还有数码家庭、数码家居等称法。 智能家居是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。 智能家居是一个居住环境,是以住宅为平台安装有智能家居系统的居住环境,实施智能家居系统的过程就称为智能家居集成。 智能家居集成是利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成。由于智能家居采用的技术标准与协议的不同,大多数智能家居系统都采用综合布线方式,但少数系统可能并不采用综合布线技术,如电力载波,不论哪一种情况,都一定有对应的网络通信技术来完成所需的信号传输任务,因此网络通信技术是智能家居集成中关键的技术之一。安全防范技术是智能家居系统中必不可少的技术,在小区及户内可视对讲、家庭监控、家庭防盗报警、与家庭有关的小区一卡通等领域都有广泛应用。自动控制技术是智能家居系统中必不可少的技术,广泛应用在智能家居控制中心、家居设备自动控制模块中,对于家庭能源的科学管理、家庭设备的日程管理都有十分重要的作用。音视频技术是实现家庭环境舒适性、艺术性的重要技术,体现在音视频集中分配、背景音乐、家庭影院等方面。 二、表述 智能家居其实有两种表述的语意,定义中描述的,以及我们通常所指的都是智能家居这一住宅环境,既包括单个住宅中的智能家居,也包括在房地产小
智能小车设计报告书
智能小车设计报告 专业:电子信息工程技术 学生姓名:史响林周博超朱雄王昌指导教师:张力 完成日期:2014 年5 月24 日
目录 1 绪论 (3) 2 设计任务 (2) 2.1设计任务 (2) 3 设计方案 (3) 3.1任务分析 (3) 3.2方案框架 (3) 4 系统硬件设计 (4) 4.1核心芯片模块AT89S52 (4) 4.2电机驱动电路设计 (4) 4.3超声波测距设计 (6) 4.4传感器测速的设计 (8) 4.5LCD1602显示模块 (9) 5 系统软件设计 (8) 5.1程序设计流程图 (8) 5.2关键程序设计 (8)
6 心得体会 (13) 附录1 系统原理图 (15) 附录2 系统PCB图 ........................................................... 错误!未定义书签。附录 3 程序清单 (17) 1 论绪 智能作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等可以为自动运输机器人、采矿勘探机器人、家用自动清洁机器人等自动半自动机器人的设计与普及有一定的参考意义。同时小车可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。超声波作为智能车避障的一种重要手段,
以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用。本智能小车系统最诱人的前景就是可用于未来的智能汽车上了,当驾驶员因疏忽或打瞌睡时这样的智能汽车的设计就能体现出它的作用。如果汽车偏离车道或距障碍物小于安全距离时,汽车就会发出警报,提醒驾驶员注意,如果驾驶员没有及时作出反应,汽车就会自动减速或停靠于路边。这样的小车还可以用于月球探测等的无人探月车,帮助我们传达月球上更多的信息,让我们更加的了解月球,为将来登月做好充分准备。这样的小车在科学考察探测车上也有广阔的应用前景,在科学考察中,有很多危险且人们无法涉足的地方,这时,智能科学考察车就能够派上用场,在它上面装上摄像机,代替人们进行许多无法进行的工作。 设计采用对比选择,模块独立,综合处理的研究方法。采用AT89S52单片机模块作为小车的检测和控制核心;通过翻阅大量的相关文献资料,分析整理出有关信息,在此基础上列出不同的解决方案,结合实际情况对比方案优劣选出最优方案进行设计。本次试验利用单片机模块上的按键来控制小车的速度,方向,及在车体上面装有超声波测距模块利用LCD1602显示屏来显示测出来具体距离。本设计结构简单,较容易实现,但具有高度的智能化、人性化,一定程度体现了智能。 通过调试检测各模块,得到正确的信号输出,实现其应有的功能。最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模
智能家居系统设计方案
智能家居系统设计方案 一、智能家居概述 智能家居是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术等,将家居生活有关的家用电器设备和住宅设施监控集成,构建高效的家用电器日程事务管理系统,提升了家居安全性、便利性、舒适性、艺术性,并可实现节能环保的居住环境。通常我们把实施智能家居系统的过程称为智能家居集成。 二、智能家居系统范围 智能家居系统的主要子系统有:家居布线系统、家庭网络系统、智能家居集成控制管理系统、家居照明控制系统、住宅安防系统,这些是智能家居配置的必备系统,还有家庭影音系统、家庭环境控制系统,家庭门窗窗帘自动控制系统、家庭宠物喂养控制系统、家庭智能单品电器等是智能家居系统配置的可选系统。三、智能家居系统功能介绍 本方案针对别墅三层智能家居系统规划有可视对讲门禁系统、远程访问控制系统、定时控制系统、远程监控及安防报警系统、
灯光控制系统、家电控制系统等六大子系统。以下针对各系统作系统功能组成说明: 1.可视对讲门禁系统 访客来访,您在家时的情境 (1)访客可直接透过别墅门口机呼叫室内机做可视对讲,确认访客身份开门。 (2)当呼叫时,您不在室内主机旁,您不用再急急忙忙地跑到对讲管理主机接听,只要拿起家用的电信分机即可与来访客人对讲/开门。 (3)您也可以使用室内对讲分机,做访客呼叫对讲/开门。 (4)您也可以拿起专用的遥控器控制开门。 访客来访,您不在家时的情境 (1)当您外出时,可于智能控制管理主机设定外出转接,当客人来访时,系统会作呼叫转移,您可以用手机与来访客作对讲。 (2)若是您的家人忘了带锁匙时,可直接于手机上透过3G网络做远程控制开门。或者使用短消息发送关键词密码方式,经系统辨识确认后,也可以开门。 (3)当您外出时,可于智能控制管理主机设定外出转接,当客人来访时,系统会作呼叫转移,您可以直接用手机与门口访客做对讲。 主人回到家时的情境
汽车智能化报告
关于汽车智能化的报告 鲁居印 15101415 1006465719@https://www.360docs.net/doc/ff15530984.html, 钟鸿敏 15101417 1326872385@https://www.360docs.net/doc/ff15530984.html, 孙坚 15101427 260237727@https://www.360docs.net/doc/ff15530984.html, 吉大汽院车辆14班 2010/11/14 摘要Abstract 本报告对汽车智能化的功能进行了总结;并探讨了如何应用智能化解决汽车工业中的安全和拥堵问题。在汽车工业迈向驾驶无人化的进程中,提出了在一定环境下根据计算机记忆系统和传感系统实现自动驾驶的设想。 This report makes a conclusion of the functions of automobile intelligence and discusses how to use intelligence to solve the safety and congestion problem in automobile industry. During the process to driving without person, we put forward to an imagination that we can achieve driving with no person in addition to computer memory system and sense system under designated environment. 前言Instruction 智能化汽车是环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通信、人工智能及自动控制等技术,是典型的高新技术综合体。智能车的研究起始于二十世纪七十年代,到八十年代主要从事智能汽车研究
智能家居控制系统
智能家居控制系统 This manuscript was revised by JIEK MA on December 15th, 2012.
智能家居控制系统 智能家居(Smart Home)是以住宅为平台,利用综合布线技术、网络通信技术、智能家居-系统设计方案安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。它将让用户有更方便的手段来管理家庭设备,比如,通过家、无线遥控器、电话、互联网或者语音识别控制家用设备,更可以执行场景操作,使多个设备形成联动;另一方面,智能家居内的各种设备相互间可以通讯,不需要用户指挥也能根据不同的状态互动运行,从而给用户带来最大程度的高效、便利、舒适与安全。与普通家居相比,智能家居不仅具有传统的居住功能,提供舒适安全、高品位且宜人的家庭生活空间,还将原来的被动静止结构转变为具有能动智慧的工具,提供全方位的信息交换功能,帮助家庭与外部保持信息交换畅通,优化人们的生活方式,帮助人们有效安排时间,增强家居生活的安全性,甚至为各种能源费用节约资金。系统的网络化功能可以提供遥控、家电(空调,热水器等)控制、照明控制、室内外遥控、窗帘自控、防盗报警、可编程定时控制及计算机远程控制等多种功能和手段。使生活更加舒适、便利和安全。因智能家居控制系统布线简单、功能灵活,扩展容易而被人们广泛接受和应用。 智能家居控制部分要求 一、智能家居控制主要分为灯光、家电(其中包含空调、电视、热水器等等);电动窗帘的控制这三大区域 A、灯光控制部分: 1.在灯光控制部分除了普通的对某一路灯进行开关控制之外;必须具有对白炽灯进行亮度的随意调节及软启动的功能。软启动及开启或关闭灯光的
智能小车地国内外地的研究现状与发展趋势
智能小车的国内外研究现状与发展趋势 “每个人都应该抛开固有的使用习惯,为车载电脑的未来承担起应有的责任。因为,车载电脑的明天无限广阔,驾驶的乐趣妙不可言。”CarBot公司的首席执行官达米恩?斯特洛兹对汽车电脑的发展充满信心。当你正在欣赏MP3音乐开着爱车去接洽某项业务的时候,发现前方公路堵塞,你悄悄地把车开到旁边的咖啡店,这时一个甜美的声音提醒你有新邮件,拿出无线键鼠处理完邮件后,再去店里喝上一杯咖啡,这时候道路已经畅通无阻了,继续开着你的爱车听着喜爱的音乐奔向目的地。这就是车载电脑带给我们的便捷!随着信息网络技术的不断发展,汽车已经不再只是拥有四个轮子的交通工具。人们更加希望汽车作为日常生活以及工作范围的一种延伸,在车里就像呆在办公室或是家里一样,能够收听音乐、看电视、看视频录像以及上网处理工作等等。想要让你的车子如此温馨、时尚而且智能,那么,车载电脑就是不可或缺的。从2001年以来,国内掀起了继买房后的买车热潮。 据统计部门的数据,至2006年中国汽车保有量已达3500万辆(其中轿车占80%,约2500万辆),每年仍以30%的速度递增。我国成为了继美国之后的第二大汽车生产和消费大国。汽车行业的迅猛发展也带动了相关配套、服务业的发展。而将功能强大的智能车载信息系统——车载电脑加载到汽车上已经成为欧美、日本等地汽车市场的首选新装备。车载电脑给汽车带来了一场信息化的革命,让每辆汽车构建成一个完美的车载信息与娱乐系统终端,包括车载通讯系统、导航系统、数字娱乐系统以及辅助驾驶系统。坐在汽车里面听广播或者音乐已经习以为常,但是车载电脑带来的是全方位的数字娱乐,由于其支持WINDOWS下的所有应用程序,因此,CD、 VCD/DVD以及收看电视都成为可能。让你在开车的时候听音乐,在休息的时候欣赏好莱坞大片或是收看电视,甚至玩各种游戏。车载通讯与导航系统主要指 GPRS 和GPS,让你“轻车熟路”,而且轻松打电话。 不仅如此,它还让你轻松畅游互联网,方便地在车上发送电子邮件、查看公司业务信息等、和朋友聊天、网络游戏等等。不在办公室而胜在办公室,也无须再为塞车赶不到公司而焦头烂额!最后,还可以利用车载电脑的扩展性,把个人电脑的功能全部应用到车上,比如:MP3/DVD/DivX多媒体播放、手机控制、WiFi/3G无线上网、PC游戏、卡拉OK、红外线倒车镜头等等。车载电脑DIY如此强大的功能,让很多车友心动,“只要车内有扬声器和收音机,就可以给汽车安装车载电脑。”改装店员工的话更是把安装车载电脑当成小 KISS:“用汽车上的电池来为电脑输送动力,并将音频线连接到扬声器上,车载电脑完全不用为动力和占用空间的问题发愁。”因此,给自己心爱的坐驾安上车载电脑已经成为一种时尚。安装车载电脑和个人办公电脑没什么区别,主要也分为硬件和软件两部分。硬件方面尽量选取低功耗硬件,毕竟汽油不便宜,低功耗可以少消耗点汽油,另外也要尽可能地选取抗震效果较强的硬件。首先要选一款机箱,对于有限的车内空间,怎样充分利用十分重要。因此要选择美观而小巧的机箱,目前市面较流行的合利科技的NC小机箱只有大字典尺寸,很受车友欢迎。车载电脑的内存一般使用普通PC256MDDR内存就够用了。由于要经受劳顿奔波,存储系统一般采用笔记本硬盘,当然你要是还不放心,就可以选用CF卡存储系统。主板选择范围较大,但需要考虑两个因素,一是车内温度高,因此要求主板的功耗要低,发热不能够过高;再者考虑到机箱的空间,要求板子小巧。 众多车友推荐使用VIA的EPIA系列ITX主板,集成了显卡、声卡以及CPU,性能稳定、功耗较低。显示器一般选用8英寸或者7英寸的LCD液晶屏,有 LILIPUT(利利普)、德龙等品牌。电源是车载电脑的重心,因为汽车供电不稳定,车载启动或加速时,对主板的电源产生冲击,如果主板对电源承受力弱,就会出现死机或异常。因此车载电脑最好采用带ITPS 功能车载电脑DC/DC电源。很多车友选用逆变器方案,但并不是最佳的选择,DC变交流电,
智能家居控制系统
智能家居控制系统智能家居(Smart Home)是以住宅为平台,利用综合布线技术、 网络通信技术、智能家居-系统设计方案安全防范技术、自动控制技 术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与 家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术 性,并实现环保节能的居住环境。它将让用户有更方便的手段来管理 家庭设备,比如,通过家、无线遥控器、电话、互联网或者语音识别 控制家用设备,更可以执行场景操作,使多个设备形成联动;另一方 面,智能家居内的各种设备相互间可以通讯,不需要用户指挥也能根 据不同的状态互动运行,从而给用户带来最大程度的高效、便利、舒 适与安全。与普通家居相比,智能家居不仅具有传统的居住功能,提 供舒适安全、高品位且宜人的家庭生活空间,还将原来的被动静止结 构转变为具有能动智慧的工具,提供全方位的信息交换功能,帮助家 庭与外部保持信息交换畅通,优化人们的生活方式,帮助人们有效安 排时间,增强家居生活的安全性,甚至为各种能源费用节约资金。系 统的网络化功能可以提供遥控、家电(空调,热水器等)控制、照明 控制、室内外遥控、窗帘自控、防盗报警、可编程定时控制及计算机 远程控制等多种功能和手段。使生活更加舒适、便利和安全。因智能 家居控制系统布线简单、功能灵活,扩展容易而被人们广泛接受和应 用。 智能家居控制部分要求 一、智能家居控制主要分为灯光、家电(其中包含空调、电视、热水器等等);电动窗帘的控制这三大区域 A、灯光控制部分:
1.在灯光控制部分除了普通的对某一路灯进行开关控制之外;必须具有对白炽灯进行亮度的随意调节及软启动的功能。软启动及开启或关闭灯光的时候有个渐变的过程,即当开启灯光时,灯光强度由暗渐渐变亮,或关闭灯光的时候,灯光强度由亮慢慢变暗,可以让住户眼睛有个适应的时间,而不会因为灯光突然亮起而让眼睛感觉不舒服。 2.除了这些常见的功能外,系统还必须对灯光控制进行多种动作定义。如可以有灯光亮度的定义,比如开灯时可以让灯光渐亮到30%或50%,等等。这个主要用于模拟客户夜间回家或起床,可以让灯光不要开的太亮,以免影响其他休息的人。 3.灯光的延时开启或关闭。可以让灯光经过您设定的时间后开启或关闭。当模拟当你出门的时候,先按下玄关灯的按键,等您穿鞋关门走出去后,灯光才会慢慢的关闭。 4.动作跳变:即把灯光开之后,然后经过设定的时间后,灯光自动关闭。常应用在洗手间,这样模拟在洗手完之后按下跳变的按键,过段时间后,灯光及排气扇即可自动关闭。 5.灯光组合控制。就是一个按键可以让接入系统中的各路灯光进行不同的动作。一个按键执行的动作可以抵得上几个动作方能完成的效果。 如说离家的常用模式,当外出的时候,只需要按一个按键,即可以把家里面的灯光全部关闭,这样可以避免了走到各个房间或漏关而浪费资源的现象。 会客模式:当有客人一进来,按一个按键,把灯光全部打开,立
智能汽车发展现状和未来发展趋势
智能汽车 智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。 目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年 来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。 目录 1概述 2基本结构 3特点 4发展现状 5阶段层次 6国内进展 7国外进展 8未来预测 9商业模式 10体系架构 概述 所谓“智能车辆”,就是在普通车辆的基础上增加了先进的传感器(雷达、摄像)、控制器、执行器等装置,通过车载传感系统和信息终端实现与人、车、路等的智能信息交换,使车辆具备智能的 环境感知能力,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实 现替代人来操作的目的。 智能汽车与一般所说的自动驾驶有所不同,它指的是利用多种传感器和智能公路技术实现的汽车自动驾驶。智能汽车首先有一套导航信息资料库,存有全国高速公路、普通公路、城市道路以及各 种服务设施 (餐饮、旅馆、加油站、景点、停车场 )的信息资料;其次是 GPS 定位系统,利用这个系统精确定位车辆所在的位置,与道路资料库中的数据相比较,确定以后的行驶方向;道路状况信息系 统,由交通管理中心提供实时的前方道路状况信息,如堵车、事故等,必要时及时改变行驶路线;车 辆防碰系统,包括探测雷达、信息处理系统、驾驶控制系统,控制与其他车辆的距离,在探测到障碍 物时及时减速或刹车,并把信息传给指挥中心和其他车辆;紧急报警系统,如果出了事故,自动报告 指挥中心进行救援;无线通信系统,用于汽车与指挥中心的联络;自动驾驶系统,用于控制汽车的点 火、改变速度和转向等。 通常对车辆的操作实质上可视为对一个多输入、多输出、输入输出关系复杂多变、不确定多干扰
智能控制导论报告BP神经网络模糊控制
智能控制导论实验报告 2012-01-09 姓名:_______________ 常青_________ 学号:0815321002 班级:____________ 08自动化 指导老师:___________ 方慧娟________
实验一:模糊控制器设计与实现 一、实验目的 1. 模糊控制的特征、结构以及学习算法 2. 通过实验掌握模糊自整定PID 的工作原理 二、实验内容 已知系统的传递函数为:1/(10s+1)*e(-0.5s) 。假设系统给定为阶跃值r=30 ,系统初始值r0=0. 试分别设计 (1) 常规的PID 控制器; (2) 常规的模糊控制器; (3) 比较两种控制器的效果; (4) 当通过改变模糊控制器的比例因子时,系统响应有什么变化? 三、实验设备 Matlab 7.0 软件/SIMULINK 四、实验原理 1.模糊控制 模糊逻辑控制又称模糊控制,是以模糊集合论,模糊语言变量和模糊逻辑推理为基础的一类计算机控制策略,模糊控制是一种非线性控制。图1-1 是模糊控制系统基本结构,由图可知模糊控制器由模糊化,知识库,模糊推理和清晰化(或去模糊化)四个功能模块组成。
控制的。其传递函数的形式是: G(s) k p(1 T I S T D S),PID控制原理 针对模糊控制器每个输入,输出,各自定义一个语言变量。因为对控制输出的判断,往往不仅根据误差的变化,而且还根据误差的变化率来进行综合评判。所以在模糊控制器的设计中,通常取系统的误差值e和误差变化率ec为模糊控制器的两个输入,则在e的论域上定义语言变量“误差 E ” ,在ec的论域上定义语言变量“误差变化EC ” ;在控制量u的论域上定义语言变量“控制量U”。 通过检测获取被控制量的精确值,然后将此量与给定值比较得到误差信号e,对误差取微分得到误差变化率ec,再经过模糊化处理把分明集输入量转换为模糊集输入量,模糊输入变量根据预先设定的模糊规则,通过模糊逻辑推理获得模糊控制输出量,该模糊输出变量再经过去模糊化处理转换为分明集控制输出量。 2.PID控制 在模拟控制系统中,控制器最常用的控制规律是PID控制。PID 控制器是一种线性控制器。它根据给定值与实际输出值之间的偏差来 框图如图1-2所示。
模糊控制系统设计及实现
物理与电子工程学院 《人工智能》 课程设计报告 课题名称模糊控制系统的设计与实现专业自动化 班级 2班 学生姓名梁检满 学号 指导教师崔明月 成绩 2014年6月18日
模糊控制系统的设计与实现 摘要 自然界与人类社会有关系的系统绝大部分是模糊系统,这类系统的数学模型不能由经典的物理定律和数学描述来建立。本文在模糊控制理论基础上设计模糊温控系统,利用专家经验建立模糊系统控制规则库,由规则库得到相应的控制决策,并分析系统隶属度函数,利用matlab与simulink结合进行仿真。仿真结果表明,该系统的各项性能指标良好,具有一定的自适应性。模糊控制算法不但简单实用,而且响应速度快,超调量小,控制效果良好。 关键词:模糊逻辑;隶属度函数;模糊控制; 控制算法
1引言 在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的最主要关键,系统动态的信息越详细,则越能达到精确控制的目的。随着社会及科技的发展,现代工程实践对系统的控制要求也在不断地提高,但对于复杂的系统,由于变量太多,往往难以正确的描述系统的动态,随着人类生产、生活对控制的精细需求,传统的控制理论已渐渐不能满足工艺要求。虽然于是工程师利用各种方法来简化系统动态,以达成控制的目的,但却不尽理想。换言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力了,因此便尝试着以模糊数学来处理这些控制问题。 “模糊”是人类感知万物、获取知识、思维推理、决策实施的重要特征。模糊并非是将这个世界变得模糊,而是让世界进入一个更现实的层次。“模糊”比“清晰”所拥有的信息量更大,内涵更丰富,更符合客观世界。“模糊控制理论”是由美国学者加利福尼亚大学著名教授L. A. Zadeh于1965年首先提出,至今已有50多年的历史。模糊控制是用模糊数学的知识模仿人脑的思维方式,对模糊现象进行识别和判决,给出精确的控制量,对被控对象进行控制,它是用语言规则描述知识和经验的方法,结合先进的计算机技术,通过模糊推理进行判决的一种高级控制策略。它含有人工智能所包括的推理、学习和联想三大要素;它不是采用纯数学建模的方法,而是将相关专家的知识和思维、学习与推理、联想和决策过程,有计算机来实现辨识和建模并进行控制。因此,它无疑是属于智能控制范畴,而且发展至今已发展成为人工智能领域中的一个重要分支。其理论发展之迅速,应用领域之广泛,控制效果之显著,实为世人关注。 在工业生产过程中,温度控制是重要环节,控制精度直接影响系统的运行和产品质量。在传统的温度控制方法中,一般采取双向可控硅装置,并结合简单控制算法(如PID算法),使温度控制
基于物联网技术的智能家居控制系统设计方案
基于物联网技术的智能家居控制系统设计方案 随着人们生活水平的提高和科技的发展,家庭智能化已成为一种必然趋势而深入千家万户。 家庭智能化即智能化家居 (Smart Home),亦称数字家园(Digital Family )、家庭自动化(Home Automation )、电子家庭(E-home)、智能化住宅(Intelligent Home )、网络家居(Network Home )、智能屋(Wise House, WH)、智能建筑(Intelligent Building、等。它是利用计算机、通信、网络、电力自动化、信息、结构化布线、无线等技术将所有不同的设备应用和综合功能互连于一体的系统。它以住宅为平台,兼备建筑、网络家电、通信、家电设备自动化、远程医疗、家庭办公、娱乐等功能,集系统、结构、服务、管理为一体的安全、便利、舒适、节能、娱乐、高效、环保的居住环境。其从控制层次来分,一般由中央控制中心、家居智能控制终端、小区智能控制系统、家庭网关和外部网络几部分组成。 1智能家居系统体系结构 家居系统主要由智能灯光控制、智能家电控制、智能安防报警、智能娱乐系统、可视对 讲系统、远程监控系统、远程医疗监护系统等组成,框图如图1所示。 图1智能家居系统结构框图 2系统主要模块设计 2.1照明及设备控制 智能家居控制系统的总体目标是通过采用计算机、网络、自动控制和集成技术建立一个 由家庭到小区乃至整个城市的综合信息服务和管理系统。系统中照明及设备控制可以通过智 能总线开关来控制。本系统主要采用交互式通信控制方式,分为主从机两大模块,当主机触 发后,通过CPU将信号发送,进行编码后通过总线传输到从模块,进行解码后通过CPU触 发响应模块。因为主机模块与从机模块完全相同,所以从机模块也可以进行相反操作控制主
智能车辆发展现状及研究背景目的意义
智能车辆发展现状及研究背景目的意义 1 智能车辆的发展与现状 (1) 2 研究智能车辆的目的和意义 (4) 1 智能车辆的发展与现状 智能车辆作为智能交通系统的关键技术,是众多高新技术综合集成的载体,是一种通用性的术语,指全部或部分完成一项或多项驾驶任务的综合车辆技术。广义上讲,智能车辆属于室外移动智能机器人的一种。当车辆平台通过机器视觉或其它手段获取外部环境信息,分析并理解外部场景,并对危险状态做出警告或控制车辆的纵向或横向运动避开风险时,可认为该车辆具有智能性。 智能车辆是一个新型的交叉学科领域,它的许多新思想、解决方案得益于其他领域的启发和技术支持,如机器人、人工智能、计算机科学与系统、通信、控制与自动化、信号处理等理论,如它的一些机构、设备,如红外、雷达、声纳等则来自军事领域。 智能车辆(Intelligent Vehicle,IV)技术的研究,可以追溯到20世纪50年代初美国Electronics公司研究开发出的世界上第一台自动引导车辆(Automated Guided Vehicle,AGV),从严格意义上说,这是一台移动机器人[1]。从50年代后半期到60年代前半期,以美国为首,德国、英国以及日本等国家就展开自动驾驶和车辆导航技术的研究。时至今日,世界各国对智能车辆技术的研究开发表现出空前的热情,为此投入了大量的人力、物力,智能车辆技术也相继取得了突破性进展,如德国的VaMoRs-P车辆系统、美国的NavLab系统、意大利的ARGo 系统,我国的吉林大学JUTIV系列、国防科技大学的CITA VT系列等。 从1986年到1995年,美国Carnegie Mellon University 在著名DelcoElectronics 公司捐资赞助下相继研制了Navlab系列智能车。其中Navlab5由1990年问世P0lltac运动跑车改造而成,车上装有传感器:电视摄像机、声纳、激光测距仪、红外摄像机以及毫米波雷达等。可识别和跟踪S行曲线和道路行车线,并通过控制转向实现自主驾驶。该车的平均速度为88.5k/h,首次进行了横穿美国大陆的长途驾驶试验。1995年,NavLab进行了从匹兹堡到圣迭戈全程3000英里的公路实验,95%以上是自动驾驶。美国国防部最新研制的智能车辆Demo 系列,目的是用于危险地段的军事侦察。Demo采用的关键技术有:感知系统、计算机处理器、导航系统、路径规划、车辆控制、立体视觉、地形理解以及传感