齿轮运动仿真
Pro/e5.0齿轮仿真和分析本次设计用pro/e三维造型软件进行建模,各零件建好后,进行装配,进而实现模拟仿真运动分析。7.1建立机构模型经装配后,得到跑步机的仿真模型。
7.2运动仿真
7.2.1进入机械设计环境单击菜单栏中的【应用程序】→【机构】命令,进入机械设计环境。单击菜单栏中的【编辑】→【连接】命令,弹出【连接组件】对话框。单击该对话框的【运行】,检查装配的连接情况。若连接成功,
系统弹出【确认】对话框。单击该对话框中的【是】按钮,确认检查情况
。
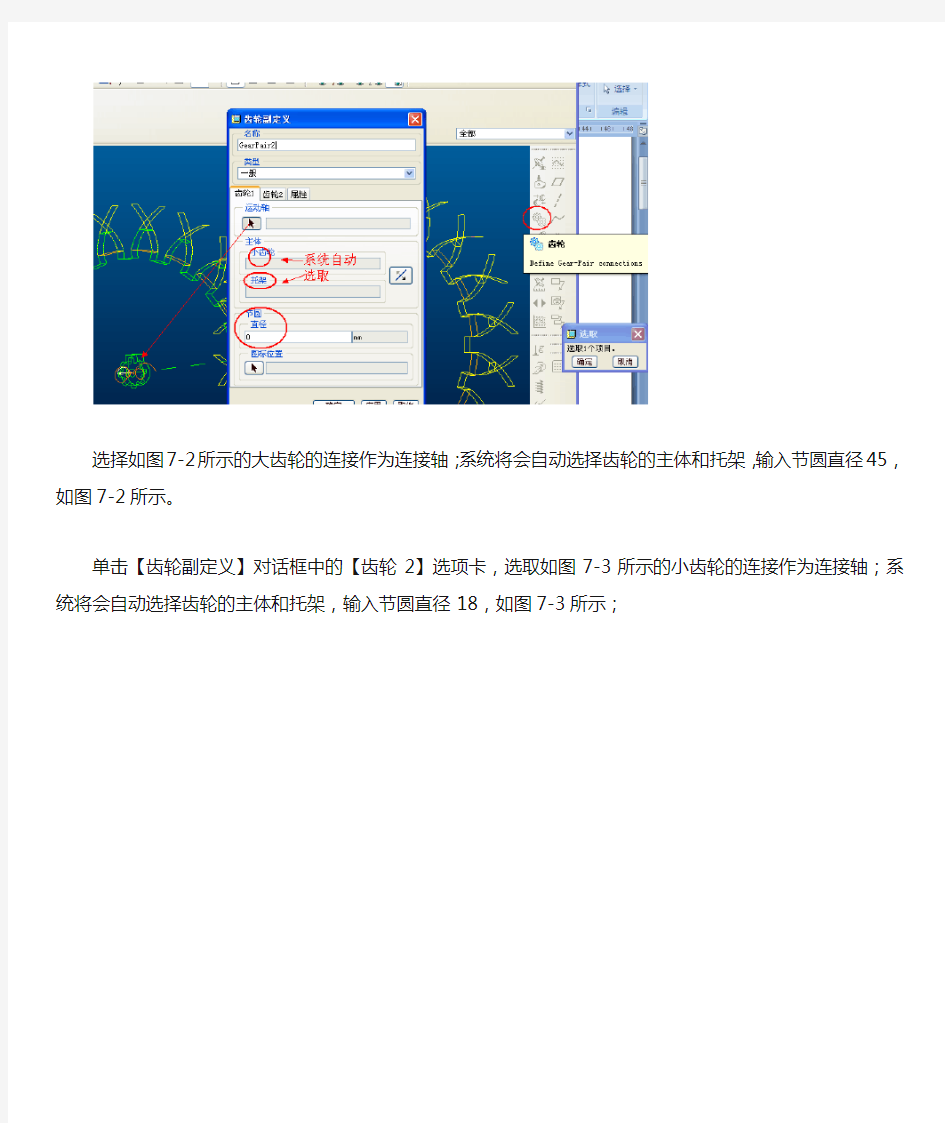
7.2.2定义圆锥齿轮连接单击【模型】工具【齿轮】,弹出【齿轮副定义】对话框,如图7-2所示。接受默认名称和传动类型标准,
选择如图7-2所示的大齿轮的连接作为连接轴;系统将会自动选择齿轮的主体和托架,输入节圆直径45,如图7-2所示。
单击【齿轮副定义】对话框中的【齿轮2】选项卡,选取如图7-3所示的小齿轮的连接作为连接轴;系统将会自动选择齿轮的主体和托架,输入节圆直径18,如图7-3所示;
单击该对话框中的【确定】
按钮,此时,在齿轮机构中将显示齿轮副连接的标志,如图7-4所示。
.2.3 创建驱动器单击【模型】工具栏【伺服电动机】按钮,弹出【伺服电动机定义】对话框,如图7-5所示。接受默认名称,在绘图区选择如图7-5所示的连接轴作为伺服电动机的驱动对象,并单击【反向】按钮。
在如图7-5所示的对话框中单击【轮廓】面板,在如图7-6所示的【规范】选项组下拉列表中选择【速度】选项。其余均接受对话框中当前项的选择,默认当前轴的位置为零位置。在【模】选项组下拉列表中选择【常数】选项,表示驱动器以常数形式运行。在【A】,文本框中输入100。单击该对话框中的【确定】按钮,完成伺服电动机的建立。此时,在齿轮机构中将显示驱动器的标志。
7.3分析
7.3.1运动分析单击【分析】工具栏中的【机构分析】按钮,弹出【分析定义】对话框,接受默认名称,在【类型】选项组下拉列表中选择【运动学】选项,可以观察齿轮机构的运动情况。在【图形显示】选项组中的【终止时间】文本框中输入20,如图7-7所示。
单击【运行】,可以查看齿轮的运行情况。单击【确定】,退出该对话框。
7.3.2 结果分析
(1)回放并保存分析结果。单击菜单栏中的【分析】→【回访】命令,弹出【回放】对话框。在【结果集】列表中将显示上一步建立的运动分析AnalysisDefinition1。单击【播放当前结果集】按钮,弹出【动画】对话框,使用各按钮可控制回放结果的方向和速度。可以单击【捕获】按钮,弹出【捕获】对话框,按图示设置输出文件格式,也可以通过单击【确定】按钮,创建文件zp5.mpg。(2)分析齿轮上一点的位移、速度、加速度。首先在大齿轮
上创建任一个点PNT0,如图7-8所示。单击【运动】工具栏中的【测量】按钮,弹出【测量结果】对话框。在【图形类型】选项组下拉列表中选择【测量与时间】选项,再单击该对话框的【创建新测量】按钮,弹出【测量定义】对话框对话框。在【名称】文本框中输入“位移”,在【类型】选项组下拉列表中选择【位置】选项,在齿轮上选择刚创建的点;在【评估方法】选项组下拉列表中选择【每个时间步长】选项,如图7-9所示。单击该对话框中的【确定】按钮,完成测量定义,返回【测量结果】对话框,如图7-10所示。可以看到在【结果集】列表中多增加了【位移】一项。双击【结果集】列表框中的“AnalysisDefinition1”,系统将自动计算结果,并把结果值显示在【测量】列表框中的【值】列中,如图7-10所示。再次单击对话框中的【创建新测量】按钮,弹出【测量定义】对话框。在名称文本框中输入“速度”,在【类型】选项组下拉列表中选择【速度】选项,在该次轮上选择相同的点;在【评估方法】选项组下拉列表中【每个时间步长】选项。单击该对话框中的【确定】按钮,完成测量定义,返回【测量定义】对话框。使用同样的方法创建该点的“加速度”,在【类型】选项组下拉列表中选择【加速度】选项。最终【测量结果】对话框如图7-10所示。在该对话框中勾选【分别绘制测量图形】复选框,再按
高职《机械设计基础》齿轮传动、教案
****职业技术学院教案 参考资料: 多媒体材料,网络资料
讲稿内容 备注
(2)渐开线上任意一点的法线必切于基圆。 (3)渐开线上各点压力角不等,离圆心越远处的压力角越大。基圆上压力角为零。渐开线上任意点K处的压力角是力的作用方向(法线方向)与运动速度方向(垂直向径方向)的夹角O K(图10-1),由几何关系可推出 :K 二cos」rb r K 式中5—基圆半径,r K—K点向径 (4)?渐开线的形状取决于基圆半径的大小。基圆半径越大,渐开线越趋平直(图 图10-1渐开线的形成及压力角 10.2.3渐开线齿廓的啮合特性 两相互啮合的齿廓E1和E2在K点接触(如图10-3),过K点作两齿廓的公法线nn,它与 连心线O1O2的交点C称为节点。以。1、。2为圆心,以O Q(r1)O2C(r2')为半径所作的圆称为节圆,因两齿轮的 节圆在C点处作相对纯滚动,由此可推得 (10-2) 一对传动齿轮的瞬时角速度与其连心线被齿廓接触点的公法线所分割的两线段长度成反比,这个定律称为齿廓 啮合基本定律。由此推论,欲使两齿轮瞬时传动比恒定不变,过接触点所作的公法线都必须与连心线交于一定点。 10.2.3渐开线齿廓的啮合特性 1.渐开线齿廓能保证定传动比传动 一对齿轮传动,其渐开线齿廓在任意点K接触(图10-3),可证明其瞬时传动比恒定。 过K点作两齿廓的公法线nn,它与连心线O1O2交于C点。由渐开线特性推知齿廓上各点法 (10-1) 10-2 )。 10-2渐开线形状与基圆大小的关系 (5)基圆以内无渐开线。 0* 8
渐开线齿轮制成后,基圆半径是定值。渐开线齿轮啮合时,即使两轮中心距稍有改变,过接触点 齿廓公法线仍与两轮连心线交于一定点,瞬时传动比保持恒定,这种性质称为渐开线齿轮 传动的可分离性,这为其加工和安装带来方便。 3.齿廓间的正压力方向不变 齿轮无论在哪点接触,过接触点做公法线,公法线总是两圆的内公切线n1 n2o 1分度圆、模数和压力角(图10-5) 齿轮上作为齿轮尺寸基准的圆称为分度圆,分度圆以d表示。相邻两齿同侧齿廓间的分度 圆弧长称为齿距,以p表示,p=n i/z, z为齿数。齿距p与n的比值p/ n称为模数,以m表示。 模数是齿轮的基本参数,有国家标准,见表4-1 o由此可知: 齿距p = m n (4-4) 分度圆直径 d = m z (4-5) 渐开线齿廓上与分度圆交点处的压力角:?称为分度圆压力角,简称压力角,国家规定标准压力角 线切于基圆,齿廓公法线必为两基圆的内公切线 2.中心距的可分性 由厶N i O i CN2O2C,可推得 N1N2, N1N2与连心线O1O2交于定点C o ⑷1 i -- °2C _ r b2 O1C r bi (10-3) 图10-3齿廓啮合基本定律图10-4渐开线齿廓啮合
二级圆柱齿轮减速器建模及仿真
二级圆柱齿轮减速器建模及仿真 任务书 1.设计的主要任务及目标 在已有减速器设计的基本理论基础上,利用CAD绘图软件进行二维平面设计,建立齿轮、轴、轴承、端盖、上箱体及下箱体的三维参数化模型,将各零件进行装配并且运用Pro/E绘图软件对其进行运动仿真。 2.设计的基本要求和内容 1、根据减速器设计的原始资料,研究减速器各组成部件设计及校核方法; 2、对二级圆柱齿轮减速器设计进行功能分解,确立系统的整体结构; 3、研究二级圆柱齿轮减速器系统设计中相关技术; 4、采用 Pro/E 软件,设计一个二级圆柱齿轮减速器实现减速器的三维模型生 成,以及由此生成三维动态仿真,进行工作过程仿真。 3.主要参考文献 [1] 宋正和,张子泉主编机械设计基础北京交通大学出版社,2007.5 [2] 罗圣国,吴宗泽主编机械设计手册高等教育出版社,2006.5 [3] 濮梁贵,纪名刚主编机械设计高等教育出版社, 2001 [4] 卢颂峰,王大康主编机械设计毕业设计北京工业大学出版社, 1993 [5] 机械设计手册联合编写组机械设计手册中册化学工业出版社, 1982 [6] 张富洲主编机械设计毕业设计西北工业大学出版社 1998 4.进度安排
二级圆柱齿轮减速器建模及仿真 摘要:减速器(又称减速机、减速箱)是一台独立的传动装置,它由密闭的箱体、互相啮合的一对或几对齿轮、传动轴及轴承等组成。常安装在电动机(或其他原动机)与工作机之间。作为一种重要的动力传递装置,在机械化生产中起着不可替代的作用。减速器主要运用齿轮传动装置而实现运作。 本设计简述了带式输送机的动力传递装置—二级直齿圆柱齿轮减速器的设计过程。主要包括传动方案设计、电动机的选择、V带设计选择、,齿轮传动设计及轴的设计选择和校核等。其间设计过程多次运用CAD、Pro/e软件设计绘制减速器装配图零件图来优化完整本设计,最终实现减速器的运动仿真并完成减速器的模拟设计。 关键词:减速器,传动装置,齿轮传动 Two cylindrical gear reducer modeling and simulation Abstract:Reducer ( also known as reducer, reducer ) is an independent transmission device, which is composed of a sealed box, meshing pair or several pairs of gear, shaft and bearing. Often mounted on the motor ( or other prime mover ) and working machine. As a kind of important power transmission device, the mechanized production plays an irreplaceable role. Reducer mainly used gear transmission device and operation. The design of the belt conveyor power transfer device - two straight tooth cylindrical gear reducer design process. Mainly includes the transmission scheme design, the choice of motor, V belt design, selection, design of gear and shaft design and checking. During the design process to use manyCAD, Pro/e software design drawing speed reducer assembly drawing parts drawing to optimize the entire design, final implementation reducer reducer motion simulation and simulation design. Key words: reducer, gear, gear transmission
行星齿轮的三维建模与运动仿真
北京工业大学耿丹学院 毕业设计(论文) 基于Solidwork的行星齿轮的三维建模与运动仿真 所在学院 专业 班级 姓名 学号 指导老师 年月日
摘要 行星齿轮减速器是一种至少有一个齿轮的几何轴线绕着固定位置转动圆周运动的传动,变速器通常和若干行星轮和传递载荷的作用,为了使功率分流。渐开线行星齿轮传动具有以下优点:传动比大,结构紧凑,体积小、质量小,效率高,噪音低,运转平稳,因此被广泛应用于冶金,工程机械,起重,运输,航空,机床,电气机械及国防工业等部门,作为减速、变速或增速的齿轮传动装置 NGW型行星齿轮传动机构的传动原理:当高速轴由电机驱动,带动太阳轮,然后带动行星轮转动,内齿圈固定,然后带动行星架输出运动的,在行星架上的行星轮既自转和公转,具有相同的结构。二级,三级或多级传输。NGW型行星齿轮传动机构主要由太阳齿轮,行星齿轮,内齿圈,行星架,命名为基本成分后,也被称为zk-h型行星齿轮传动机构。 本设计是基于行星齿轮结构设计的特点,和SolidWorks三维建模和运动仿真。行星齿轮和各种类型的特性的比较,确定方案;其次根据输入功率,相应的输出转速,传动比的传动设计、总体结构设计;三维建模并最终完成了SolidWorks,和模型的装配,并完成了传动部分的运动仿真和运动分析。 关键词:行星齿轮减速器、运动仿真、装配、三维建模
Abstract Planetary gear reducer is driving a at least one gear geometric axis rotated around a circular motion of fixed position, the transmission is usually and planetary gear and transfer load, in order to make the power split. Involute planetary gear transmission has the following advantages: large transmission ratio, compact structure, small volume, small mass, high efficiency, low noise, smooth operation, so it is widely used in metallurgy, engineering machinery, lifting, transportation, aviation, machine tools, electrical machinery and defense industry and other departments, as gear reducer, gear or the growth The transmission principle of NGW type planetary gear transmission mechanism: when the high-speed shaft driven by a motor, to drive the sun gear, and the planet wheel is driven to rotate, the inner gear ring is fixed, and then drives the planetary frame outputting motion, on the planet carrier planet wheel both rotation and revolution, has the same structure. The two level, three level or multilevel transmission. The NGW type planetary gear transmission mechanism mainly consists of a sun gear, planet gear, inner gear ring, a planetary frame, named after the basic components, also known as the ZK-H type planetary gear transmission mechanism. This design is the design of planetary gear structure based on SolidWorks, and 3D modeling and motion simulation. Comparison of characteristics of planetary gears, and various types of determination scheme; secondly according to the input power, the output speed of the overall design, transmission design, ratio; 3D modeling and finished SolidWorks, assembly and model, and the motion simulation and motion analysis of the transmission part. Keywords: planetary gear reducer, assembly, motion simulation, 3D modeling
乐高第3课 齿轮传动——风扇 教学案
第3课齿轮传动——风扇教学案 一、提出问题 当夏天到来时,天气很热,我们经常会打开电风扇来解热,电风扇可以说是我们在夏天里的“小伙伴”,现在就让我们动手来制作一个风扇吧! 二、联想 如图3-1和图3-2所示,想一想生活中的风扇是什么样子的风扇都有什么特点呢 图3-1风扇1图3-2 风扇2 三、要求: 风扇制作 1. 风扇有扇叶并且可以转动 2. 利用齿轮传动加快扇叶转动 3. 稳定的放在桌面上 四、构建 技能牌:齿轮 齿轮的作用: 齿轮是依靠齿的啮合来传递动力的零件,通过齿轮的传动还可以改变输出的扭矩和角速度,或者是改变运动的方向。 扭矩:扭矩是齿轮转动时切向的力,我们可以理解为齿轮发生转动的力。 例如,当我们喝饮料时,我们要使用一定的力去把瓶盖拧开。 角速度:是物体转动的速度。单位是弧度每秒。例如,这节课我们将制
作的风扇,它转动的角速度就非常快。 齿轮的传动: 乐高机器人套装中提供了很多种齿轮,这节课我们先来认识一下直齿轮。如图3-3所示,乐高直齿轮从左到右分别为40齿,24齿,16齿和8齿共4种类型。 图3-3 乐高直齿轮 机器人可以通过这些齿轮的传动来改变扭矩,改变角速度或改变方向。一般来说,乐高的齿轮在搭建的时候通常要与梁来进行配合,将齿轮用轴与梁进行连接,你可能会有这样的担心,齿轮会不会与梁有接触而产生摩擦呢不过,当你使用的时候,你会发现乐高的齿轮能够与梁配合的非常好,完全不用担心会产生摩擦或阻力的问题。下面我们来看几组齿轮传动的例子。 例1 8齿齿轮传动40齿齿轮,如图3-4所示。 图3-4 8齿传动40齿 例2
40齿齿轮传动8齿齿轮,如图 3-5所示。 例3 40齿齿轮传动24齿齿轮传动8齿齿轮,如图3-6所示。 例4 24齿齿轮传动8齿齿轮传动24齿齿轮,如图3-7所示。 齿数,扭矩和角速度的关系 齿数(n )与扭矩(T )成正比 T1×n2=T2×n1 齿数(n )与角速度(T )成反比 n1×w1=n2×w2 我们以例1的8齿传动40齿为例,由于齿数与扭矩成正比关系,因 此传动后40齿这根轴输出的扭矩是8齿的5倍;由于齿数与角速度成反 图3-5 40齿传动8齿 图3-6 3个齿轮传动 图3-7 3个齿轮传动
齿轮的装配技术
齿轮的装配技术 摘要:齿轮传动是各种机械中最常用的传动方式之一,可用来传递运动和动力,改变速度的大小或方向,还可把传动变为移动。齿轮传动在机床、汽车、拖拉机和其他机械中应用很广泛,其原因是具有以下特点:能保证一定的瞬时传动比,传动准确可靠,传递的功率和速度变化范围大,传动效率高,使用寿命长以及结构紧凑,体积小等,但也有一定缺点,如噪音大,传动不如带传动平稳,齿轮装配和制造要求高等。齿轮传动质量的好坏,与齿轮的制造和装配精度有着密切关系。研究齿轮的装配技术具有重要意义。 目录 一、引言 (2) 二、齿轮的种类 (2) (一)平行轴之齿轮 (2) (二)直交轴之齿轮 (2) (三)错交轴之齿轮 (2) 三、齿轮传动的基本要求 (2) (一)传递运动的准确性 (2) (二)传动的平稳性 (2) (三)载荷分布的均匀性 (2) (四)传动侧隙的合理性 (2) 四、齿轮传动机构的精度要求 (3) (一)齿轮的加工精度 (3) (二)齿轮的精度等级 (4) (三)齿轮副的接触精度 (4) (四)齿轮副的侧隙 (4) 五、齿轮的装配与检查 (5) (一)圆柱齿轮传动机构的装配 (5) (二)锥齿轮传动机构的装配 (5) (三)蜗杆传动机构的装配和差速器的装配 (5) 六、齿轮传动的失效形式及措施 (6) (一)齿轮折断 (6) (二)齿面点蚀 (7) (三)齿面磨粒磨损 (7) (四)齿面胶合 (7) (五)齿面塑性变形 (7) 七、影响齿轮传动效率因素 (7) 八、结论 (7)
一、引言 齿轮是现代机械传动中的重要组成部分。从国防机械到民用机械,从重工业机械到轻工业机械,无不广泛的采用齿轮传动。随着我国工农业生产和科学技术的飞跃发展,对于齿轮的需要显著增加。因此,齿轮的配合技术,便成为发展机械工业的一个重要环节。二、齿轮的种类 (一)平行轴之齿轮 1、正齿轮(直齿轮):齿筋平行于轴心之直线圆筒齿轮。 2、齿条:与正齿轮咬合之直线条状齿轮,可以说是齿轮之节距在大小变成无限大时之特殊情形。 3、内齿轮:与正齿轮咬合之直线圆筒内侧齿轮。 4、螺旋齿轮:齿筋成螺旋线之圆筒齿轮。 5、斜齿齿条:与螺旋齿轮咬合之直线状齿轮。 6、双螺旋齿轮:左右旋齿筋所形成之螺旋齿轮。 (二)直交轴之齿轮 1、直齿伞形齿轮:齿筋与节圆锥之母线(直线)一致之伞形齿轮。 2、弯齿伞形齿轮:齿筋为具有螺旋角之弯曲线的伞形齿轮。 3、零螺旋弯齿伞形齿轮:螺旋角为零之弯齿伞形齿轮。 (三)错交轴之齿轮 1、圆筒蜗轮齿轮:圆筒蜗轮齿轮为蜗杆及齿轮之总称。 2、错交螺旋齿轮:此为圆筒形螺旋齿轮,利用要错交轴(又称歪斜轴)间传动时称之。3、其它之特殊齿轮: 面齿轮:为能与正齿轮或与螺旋齿轮咬合之圆盘形的面齿轮。鼓形蜗轮齿轮:凹鼓形蜗杆及与此咬合之齿轮的总称。 戟齿轮:传达错交轴之圆锥状齿轮。形状类似弯齿伞形齿轮。 三、齿轮传动的基本要求 (一)传递运动的准确性 由齿轮啮合原理可知,在一对理论的渐开线齿轮传动过程中,两齿轮之间的传动比 是确定的,这时传递运动是准确的。但由于不可避免地存在着齿轮的加工误差和齿轮副的装配误差,使两轮的传动比发生变化。从而影响了传递运动的准确性,具体情况是,在从动轮转动360°的过程中,两轮之间的传动比成一个周期性的变化,其转角往往不同于理论转角,即发生了转角误差,而导致传动运动的不准确,这种转角误差会影响产品的使用性能,必须加以限制。 (二)传动的平稳性 齿轮传动过程中发生冲击、噪音和振动等现象,影响齿轮传动的平稳性,关系到机器的工作性能、能量消耗和使用寿命以及工作环境等。因此,根据机器不同的使用情况,提出相应的齿轮传动平稳性要求,产生齿轮传动不平稳的原因,主要是由于传动过程中传动比发生高频地瞬时突变的结果。在从动齿轮转一转的过程中,引起传递不准确的传动比变化只有一个周期,而引起传动不平稳的传动比变化有许多周期,两者是不同的,实际上在齿轮传动过程中,
齿轮技术的发展趋势
齿轮技术的发展趋势 近年来,一些新技术的运用和交叉学科的渗透,推动了齿轮设计和制造技术的发展。齿轮传动技术发展表现在:①高速重载齿轮向高参数、高寿命方向发展; ②汽车齿轮采用现代化制造工艺,使精度提高,噪声减小;③通用齿轮向成套化方向发展,各种型式齿轮箱得到广泛应用;④齿轮传动和其他类型传动相结合。 目前,国际齿轮产品的发展趋势主要有以下几方面,而我国齿轮生产企业的产品在疲劳寿命与噪声指标上与国外先进水平表现出来很大的差距,主要与材料和热处理水平有很大关系。 ●动力传动齿轮装置正沿着小型化、高速化、标准化方向发展,于是特殊齿轮的应用、行星齿轮装置的发展、低振动、低噪声齿轮装置的研制成了齿轮设计方面的一些特点; ●由于机械设备向大型化发展,齿轮的工作参数提高了,如高速齿轮的传递功率为1000-30000kw; ●由于硬齿面齿轮广泛应用,以及高速、高性能要求的齿轮日益增多,因此要求磨齿加工,在效率和质量上都要提高; ●关于齿轮材料与热处理随着硬齿面齿轮的发展,也逐渐受到人们的重视。 1 齿轮装置小型化、高速化、标准化 齿轮装置正沿着小型化、高速化、标准化方向发展。为达到齿轮装置小型化目的,提高了现有渐开线齿轮的承载推力。各国普遍采用硬齿面技术,提高硬度以缩小装置的尺寸;也可应用以圆弧齿轮为代表的非凡齿形。英法合作研制的舰载直升飞机主传动系统采用圆弧齿轮后,使减速器高度大为降低。随着船舶动力由中速柴油机代替的趋势,在大型船上采用大功率行星齿轮装置确有成效;现在冶金、矿山、水泥一轧机等大型传动装置中,行星齿轮以其体积小、同轴性好、效率高的优点而应用愈来愈多。 1)齿轮箱的小型化 齿轮箱小型化是指在传递能力和转速比相同的情况下,尽可能减小其尺寸与重量,并具有一定的经济性。汉斯(HURTH)齿轮箱是齿轮箱小型化设计的一个成功范例:HBW220-3型汉斯齿轮箱的重量约为国内同类产品2Cl6型齿轮箱的l/5,而体积约为2Cl6型齿轮箱的1/3。箱体材料选用强重比高的铝合金,用压铸
传动系统(驱动系统)的力学建模与仿真SimDriveLine
——传动系统(驱动系统)的力学建模与仿真 SimDriveline是Simulink?的扩展,它为传动系统(驱动系统)的力学建模与仿真提供有力的工具。这些工具包括像齿轮、转动轴和离合器等部件;标准的变速器模板;发动机和轮胎模型。SimDriveline专门为传动系的力学分析进行了易用性和计算速度方面的优化。它实现了与MathWorks控制系统设计和代码生成产品的集成,这样不仅可以进行控制器设计,而且还能够把机械系统模型生成实时代码,在实时环境中对控制器进行测试。 SimDriveline可以广泛用于汽车、航空、国防和工业领域。它尤其适合于 汽车和航空传动系统的控制器开发。 特点 ?在Simulink下对传动系力学进行定义的 建模环境 ?通用的齿轮结构库 ?动态元件库,包括离合器和转动限位器 (Rotational stops)、液力变矩器和扭转的 弹簧-减震器 ?通用的变速器模板 ?车辆部件的基本模型,包括发动机、纵向 车辆动力学和轮胎 强大功能 传动系统的建模 SimDriveline为在Simulink环境中建立传动系模型提供了有效的途径。用户可以使用模块图网络描述来表示一个系统。不同的模块代表不同的部件,如齿轮、离合器和液力变矩器。连接不同模块之间的线代表旋转部件,如驱动轴。在SimDriveline中,用户可以拥有Simulink的所有功能。使用传感器模块,用户可以测量速度、加速度和转矩,并且把这些测量信号值传给标准的Simulink 模块。Simulink信号能够通过执行器模块对驱动转矩进行定义,或者预先设定传动轴的动力学参数。SimDriveline为实现完全的机械系统3-D仿真器提供了另外一条有效的途径,它完全专注于旋转机械的力学仿真。每一根杆件的运动被限制于绕某个轴的转动,用户可以通过一个简单的惯性质量部件为每根杆件进行质量参数赋值。只对每根杆件的旋转速度进行记录的结果就是加快仿真执行的速度。 齿轮、离合器和动力学元件建模 SimDriveline包括了很多部件的模块库,这些模块定义了连接轴之间的部件的运动和转矩关系。
基于CATIA的齿轮参数化设计建模及运动仿真
基于CATIA的齿轮参数化建模及运动仿真 作者:许昌军 指导老师:朱梅 (安徽农业大学工学院 07机械设计制造及其自动化 合肥230036) 摘要:文章介绍了运用参数化三维软件CATIA对渐开线直齿轮及斜齿轮进行参数化三维建模。通过GSD模块中的fog方式生成参数方程建立渐开线,再通过镜像、剪切、特征阵列等命令建立齿轮轮廓,通过拉伸、开槽等命令建立渐开线齿轮三维模型,大大提高了设计人员的工作效率。然后用建模的直齿轮创建直齿轮库,最后进入电子样机运动模块(KIN)对两啮合齿轮进行运动仿真及干涉分析。 关键词:参数化 CATIA 运动仿真 渐开线直齿轮 1 引言 本文基于CATIA 的三维建模环境, 设计开发了渐开线直齿轮参数化设计系统, 建立零件的3D模型, 为渐开线直齿轮的传动、仿真、优化设计、有限元分析打下基础。用户只需根据修改齿轮参数就可以生成新的渐开线直齿轮, 减少繁琐复杂的重复劳动, 从而大大提高设计效率。 1.1CATIA软件介绍 CATIA(Computer Aided Tri-dimensional Interface Application) 是法国达索(Dassault Systemes)飞机公司于1975年开始发展起来的一整套完整的3D CAD /CAM/CAE软件,CATIA V5作为新一代的CATIA版本,提供更多的新功能,其界面更加人性化,基于Windows的操作界面非常友好,因此使得复杂、枯燥的设计工作变得轻松而又愉快。CATIA以强大的曲面设计功能在飞机、汽车、轮船等设计领域享有很高的荣誉。 2 CATIA参数化设计分析 基于特征参数化设计的关键是特征及其相关尺寸、公差的描述,包括数据特性描述、规则特性描述、关系特性描述。数据特性描述包含特征的静态信息和制造特性;规则或方法属性定义特征特定的设计和制造特性;关系特性描述特征间的相互依赖关系或定义形状特征间的位置关系。形状特征实际上是几何实体的无任何语义的结构化组合,形状特征月特征(语义特征)间是一对多的关系,这体现了特征的应用多视角性。参数化设计的关键在于参数、公式、表格、特征等驱动图形以达到改变图像的目的,方便设计过程,提高设计效率。
最新机械基础教案(劳动版)——第十八讲直齿圆柱齿轮传动设计
第十八讲 学时: 2 学时 课题: 5.5.4 直齿圆柱齿轮传动设计目的任务:掌握渐开线直齿圆柱齿轮传动的强度计算方法重点:渐开线直齿圆柱齿轮传动的强度计算方法难点:齿面接触疲劳强度公式 教学方法:多媒体 5.5.4 直齿圆柱齿轮传动设计 1.轮齿受力分析和计算载荷 1)受力分析 图示一直齿圆柱齿轮在节点P 处的受力情况。 不考虑摩擦力,作用在齿面上的法向力Fn 可分解为圆周力Ft 和径向力Fr。
直齿圆柱齿轮传动受力分析 2) 轮齿的计算载荷 Fnc=KFn K 为载荷系数,参考表选取。 2.齿面接触疲劳强度计算 齿面点蚀主要于齿面的接触应力的大小有关。 为防止齿面点蚀,应保证齿面的最大接触应力σH不大于齿轮材料的许用接触应力[ σH。] 动画演示) u——传动比,u=z2/z1>1 ; T1——小齿轮所传递的转矩(N.mm) ; K ——载荷系数,见表; b——齿宽(mm) ; a——中心距(mm) ; ψ b ——齿宽系数; [ σH] ——齿轮材料许用接触应力(MPa) ,见表。 应用公式时还应注意下列数据的确定: 1. 传动比i 式中:σH——齿面最大接触应力(MPa) ;
u<8 时可采用一级齿轮传动。若总传动比u 为8--40,可分为二级传动;若总传动比u 大于40,可分为三级或三级以上传动。 2. 齿宽b 为了安装方便,保证轮齿全齿宽啮合,一般小齿轮齿宽b1应比大齿轮齿宽b2 大(5--10)mm 。可以认为公式里的齿宽为b2。 3. 齿宽系数ψb 一般闭式齿轮传动,ψb=0.2--1.4 4. 许用应力[ σ H] 一对齿轮啮合时,两齿轮轮齿间的接触应力相等,但许用接触应力一般是不相等的,故应用[ σH1和] [ σH2中] 较小者代入公式计算。 3.齿根弯曲疲劳强度计算 齿根弯曲疲劳强度计算是为了防止齿根出现疲劳折断。 因此,应保证齿根最大弯曲应力σF不大于齿轮材料的许用弯曲应力[ σF。](动画演示)
齿轮传动系统的动力学仿真分析
齿轮传动系统的动力学仿真分析 摘要:本文对建立好的整体机械系统的虚拟样机模型进行运动学和动力学的仿真分析,通过仿真分析,可以方便地得出齿轮传动系统在特定负载和特定工况下的转矩,速度,加速度,接触力等,仿真分析后,可以确定各个齿轮之间传递的力和力矩,为零件的有限元分析提供基础。 关键词:传动系统动力学仿真 adams 虚拟样机 中图分类号:th132 文献标识码:a 文章编号: 1007-9416(2011)12-0207-01 随着计算机图形学技术的迅速发展,系统仿真方法论和计算机仿真软件设计技术在交互性、生动性、直观性等方面取得了较大进展,它是以计算机和仿真系统软件为工具,对现实系统或未来系统进行动态实验仿真研究的理论和方法。 运动学仿真就是对已经添加了拓扑关系的运动系统,定义其驱动方式和驱动参数的数值,分析其系统其他零部件在驱动条件下的运动参数,如速度,加速度,角速度,角加速度等。对仿真结果进行分析的基础上,验证所建立模型的正确性,并得出结论。 本文中所用的动力学仿真软件是adams软件。adams软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。adams
软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。虚拟样机就是在adams软件中建的样机模型。 1、运动参数的设置 先在造型软件ug中将齿轮传动系统造型好,如下图所示。在已经设置好运动副的齿轮传动系统的第一级齿轮轴上绕地的旋转副上 给传动系统添加一个角速度驱动。然后进行仿真。在进行仿真的过程中,单位时间内仿真步数越多,步长越短,越能真实反映系统的真实结果,但缺点是仿真时间也随之变长,占用的系统空间也就越大。所以应该在兼顾仿真真实性与所需物理资源和仿真时间的基础上,选择一个合适的仿真时间和仿真的步长。 在仿真之前先设置系统所用到的物理量的单位,在工程实际中,角速度一般使用的单位是r/min,所以在系统的基本单位中把时间的单位设为min,角度的单位设成rad,而在adams中转速单位为 rad/min。本过程仿真的运动过程为:系统从加速运动到额定转速,平稳运动一段时间后,再减速运动直到停止。运动过程用函数来模拟,输入的角速度驱动的函数表达式为: step( time ,0 ,0 ,2.5 ,9168.8)+ step(time ,7.5 ,0 ,10 ,-9168.8),此函数表达式的含义为:系统从开始加速运动一直到2.5s时达到了系统的额定转速 9168.8rad/min(1460r/min),从2.5s到7.5s的时间段内,系统以额定转速运动,在7.5s到10s的时间段内,系统从额定转速减速
《轮系》教案汇总
柳州市第一职业技术学校级2012— 2013学年上学期教学教案 授课班级:12模具班 教案使用时间:第_14_周第3课时 科目〈〈机械基础》 任课教师: 单均镇
柳州市第一职业技术学校教师备课纸
l_l rn|_| rn l_l 1--1 1 J— 1 1 分组讨论完成学习项目活动书。 根据咨询的知识,且已知n1转向,试判断车床中 托板各齿轮的传动方向。 IH 一3 巡视指导 ■- 9 讨论,总结完 成项目活动 书 VI 养成自学的 习惯;培养 严谨的学习 态度。 (四)展示及评价 1)提交学习任务完成材料; 2)学生分组展示评价; 3 )老师归纳总结。(学习态度、掌握情况等。) 评价、总结给 出本节课最理 想答案 学生总结、自 评、互评 培养科学严 谨的态度; 提高口头表 达能力。 (五)巩固练习 查阅资料完成活动书思考与练习部分。 布置练习课后做练习。反复加深印 象(六)布置作业布置作业课后作业加深印象
课题:定轴轮系各轮回转方向的判定 班级: ___________ 组号: __________ 姓名:________________ 学习目标: 知识与技能目标: 1、认识什么是定轴轮系传动; 2、领会定轴轮系传动路线的分析方法; 3、掌握定轴轮系各轮回转方向判定的方法。 过程与方法目标: 1、通过阅读项目活动书完成信息查,逐渐培养学生自学的能力。 2、通过小组学习、教师指导,掌握判定定轴轮系各轮回转方向及传动路线的分析方法。 情感态度与价值观目标: 1、通过分组学习锻炼学生协作能力、交流沟通能力、表达能力、组织能力; 2、逐步养成自学的好习惯; 3、培养出科学严谨的学习态度。 教学重点: 1、定轴轮系传动路线的分析方法。 2、定轴轮系各轮回转方向的判定方法。 教学难点:定轴轮系各轮回转方向的判定方法。 教学重点、难点解决方法:讲授法、任务驱动法、分组讨论法。 教学程序设计:回顾旧知T应用赏析T新课点拨T下发活动项目书并分组完成T分组展示及对比评价T归纳总结T布置作业。 一、回顾旧知 一对内啮合与外啮合圆柱齿轮转向的判断圆柱齿轮传动并各齿轮轴线相互平行时回转方向: (速记口诀:内啮合齿轮转向相同,外啮合齿轮转向相反) 二、咨询 1、什么是轮系(阅读课本71页)? 2、什么是定轴轮系(阅读课本71页)? 3、填写下列问题(阅读课本表格74页6-3和课本77页惰轮的应用)?
齿轮传动教案[优质文档]
课题(章)机械传动 分课题(节)§6-4 齿轮传动 教学目标1、掌握齿轮传动的常用类型和应用特点。 2、掌握齿轮传动的传动比计算。 3、掌握渐开线齿轮的特点及性质。 教学重点 教学重点:1、齿轮传动的常用类型和应用特点2.齿轮传动的传动比计 算。 教学难点教学难点:外啮合标准直齿圆柱齿轮的几何尺寸计算。 教学方法讲授法、实物演示投影法、引导法等。 教学器材及设备电脑及投影仪、教具。 复习提问 姓名成绩 1、链传动的常见类型有哪些? 2、链传动的应用特点? 板书设计或教学提纲一、齿轮传动的常用类型和应用 二、传动比 三、渐开线标准直齿圆柱齿轮的基本参数和几何尺寸 四、齿轮的失效形式与常用材料 五、齿轮传动的维护方法 作业布置1、齿轮传动的维护方法 2、齿轮传动的优缺点 课后小结齿轮的知识点比较分散,采用老师讲授加学生自学的方法,方便学生思考,另外,也为后期去实验室进一步学习齿轮知识奠定了基础。 市中心组推荐意见: (盖章)年月日省中心组评审意见: (盖章)年月日
节 复习提问(5分钟)1、链传动的常用类型有哪些? 2、链传动的应用特点?老师提问回答问题 任务引入(2分钟)一、任务引入 投影仪演示减速器重点额齿轮传动动画,动力从轴1输入,经 过小齿轮和大齿轮的啮合传动后,动力从轴2输出。观察并思考, 图示齿轮的传动有何特点?工作中,轴1和轴2的转速是怎样的关 系。计算一对相啮合的标准直齿圆柱齿轮,齿数z1=20,z2=32, 模数m=10。试计算其分度圆直径d、齿顶圆直径d a、齿根圆直径 df 、齿厚s、基圆直径db和中心距a。 老师讲课学生听课 任务分析(3分钟)二、任务分析 分析齿轮的传动转向如何,有何特点必须要知道齿轮传动的 类型及其应用特点,要了解轴1和轴2的转速是怎样的关系必须要 学习有关齿轮传动比的知识。为了计算上面例题,需学习渐开线标 准直齿圆柱齿轮的基本参数和几何计算的知识,带着这些问题观看 下面一组图片。 老师分析 学生通过老 师引导观察 思考齿轮的 转向,并带着 问题进入新 课内容。
冶金机械齿轮传动装置的制造技术与发展趋势
100122 电子机械论文 冶金机械齿轮传动装置的制造技术与发 展趋势 自上世纪70年代起,我国就已经建设了包括宝钢以及武钢在内的多个不同的现代化冶金企业,令我国冶金设备的整体水平提升到了一个比较先进的高度上,齿轮传动装置更是精品层出,例如:宝钢一期到三期所用到的各种齿轮传动装置当中就包括德国产FLAND以及比利时HANSEN、日本产三井三池等比较知名的品牌减速器,同时还有包括德国产德马克、日本产三菱等大型传动装置,它们对我国的齿轮装备水平形成了积极的影响。 1 在冶金设备中运用机械齿轮传动设备的技术 1.1 常用场合 首先,需要调节转速以及力矩,以期能够满足设备使用上的需求;其次,需要对传动路线进行分配,并且调节空间动力传递具体方向以及实际位置;第三,将动力进行合成或者是分流处理,也就是可以凭借一个单独的动力
源,将动力分配到几个需要使用动力的动力源当中,并合成,整体供给工作机构。 1.2 现状 就当前来说,冶金设备当中利用的机械齿轮转动装置当中的齿轮,大多使用渗碳、磨削以及淬火的硬齿面的齿轮,通常在轧钢齿轮的传动装置当中很少会使用HB300之下的齿轮。 制造齿轮通常需要使用的是喷砂处理手段、齿根处理手段、压力淬火以及无损探伤四种,对大齿轮结构进行设计通常使用的是焊接齿轮。因为齿轮的制造进度以及承载能力在最近这些年以来有明显的提升,并且大面积地利用硬齿面齿轮,因此在进行齿轮结构的设计过程当中会常用单斜齿,例如宝钢冷轧机主传动的双齿轮座即该结构齿轮,并不会安装人字齿轮。假如受到结构或者尺寸上的限制的时候,还可以借助两个单向斜齿轮进行组合拼装成人字齿轮。尽可能使用多流式传动装置,能够在较小的环境体积当中传送较大的力矩。在实际生产过程当中,为了能够实现最大化的齿轮承载力,采用的大多都是变为齿轮以及延齿端修整等手段,通常轧机的传动装置齿轮副进行制造的过程当中,行业内对其的要求也相对较高,齿轮的接触精度需要实现80%甚至更高。
CATIA运动仿真小教程
CATIA运动仿真小教程 1. 仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。 2.运动仿真 通过“开始(S)”——“数字模拟”——“DMU Kinematics” 进入到运动仿真的模式下,开始进行仿真设置: (1)先建立一个新机制(New Mechanism);命令在“插入(I)”菜单下, (2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标 按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰。 各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。 (3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框 ,不用理它,在图形区选择要固定的零件即可。 各种铰链设置合理,系统会自动提示:
,也就是说,机制可以仿真了。 (a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。对话框示例如下 (b.)仿真采用“模拟”时,点击,即可进入 和
UG教程,齿轮设计,运动仿真,仿真加工
计算机辅助设计及制造三次作业练习 班级:机妍 15 姓名:左海涛 学号:5220150233 指导老师:曹建树 1
目录 一、深沟球轴承自顶向下装配设计 (3) 1.问题描述 (3) 2.实现过程 (4) 2.1新建装配和组件 (4) 2.2设计轮廓图 (6) 2.3设计轴承外圈 (6) 2.4设计轴承内圈 (9) 2.5设计保持架 (10) 2.6设计滚珠 (13) 2.7设计完成 (15) 二、机构运动仿真 (17) 1. 问题描述 (17) 2.实现过程 (17) 2.1新建运动仿真 (17) 2.2新建连杆 (18) 2.3新建运动副 (19) 2.4新建传动副 (22) 2.5新建3D接触 (23) 2.6开始仿真 (24) 三、餐具加工 (27) 1.问题描述 (27) 2.实现过程 (27) 2.1整体粗加工 (27) 2.2外表面精加工 (36) 2.3内表面精加工 (42)
一、深沟球轴承自顶向下装配设计 1.问题描述 试设计如下图所示深沟球轴承,具体尺寸如下所示,要求采用自顶向下的装配设计方法。 图1 轴承装配图 图2 轴承尺寸图
2.实现过程 2.1新建装配和组件 (1)打开NX8.5软件:开始→程序→NX8.5。 (2)新建装配:点击“新建”,出来“新建”对话框,类型为“装配”,修改新文件名里的“名称”和“文件夹”,注意更改的文件夹路径为英文目录下才有效,点击“确定”,如图3所示。 图3 新建装配 (3)点击菜单栏“装配”→组件→新建组件。 (4)在弹出的“新组件文件”对话框里,名称为“模型”,注意修改“新文件名”的名称及文件夹路径,路径应该与开始新建的“装配”一致,如图4所示。
机械基础齿轮传动教案(第四版)
第四章 齿轮传动(10课时) 教 学 目 标 1、了解齿轮传动的分类、特点 2、理解渐开线的形成及性质,了解齿廓的啮合的特点 3、掌握渐开线标准直齿圆柱齿轮基本参数、几何尺寸计算 4、了解渐开线齿廓的啮合的特点 5、掌握标准直齿圆柱齿轮、斜齿圆柱齿轮、直齿圆锥齿轮的正确啮合条件 6、了解斜齿圆柱齿轮、直齿圆锥齿轮的应用特点 7、了解齿轮轮齿失效的形式 教学重点难点 上述3、5两点 【复习】1、链传动的组成及特点、类型和应用 2、链传动的传动比 3、滚子链的组成、标记和特点 第一节齿轮传动的类型及应用 一、概念 齿轮机构是由齿轮副组成的传递运动和动力的装置。 二、齿轮传动的类型 齿轮的种类很多,可以按不同方法进行分类。 两轴平行 两轴不平行 按轮齿方向 按啮合情况 直齿圆柱齿轮传动 斜齿圆柱齿轮传动 人字齿圆柱齿轮传动 外啮合齿轮传动 内啮合齿轮传动 齿轮齿条传动 相交轴齿轮传动 交错轴齿轮传动 锥齿轮传动 交错轴斜齿轮传动 蜗轮蜗杆传动
(1)根据轴的相对位置,分为两大类,即平面齿轮传动(两轴平行)与空间齿轮传动(两轴 不平行) (2)按工作时圆周速度的不同,分低速、中速、高速三种; (3)按工作条件不同,分闭式齿轮传动(封闭在箱体内,并能保证良好润滑的齿轮传动)、 半 开式齿轮传动(齿轮浸入油池,有护罩,但不封闭)和开式齿轮传动(齿轮暴露在外, 不能保证良好润滑)三种; (4)按齿宽方向齿与轴的歪斜形式,分直齿、斜齿和曲齿三种; (5)按齿轮的齿廓曲线不同,分为渐开线齿轮、摆线齿轮和圆弧齿轮等几种; (6)按齿轮的啮合方式,分为外啮合齿轮传动、内啮合齿轮传动和齿条传动。 三、齿轮传动的应用 1、传动比 式中 n1、n2表示主从动轮的转速 z1、z2表示主从动轮的齿数 2、应用特点: 优点:能保证瞬时传动比恒定,工作可靠性高,传递运动准确。 传递功率和圆周速度范围较宽,传递功率可达50000kw ,圆周速度300m/s 结构紧凑,可实现较大传动比 传动效率高,使用寿命长,维护简便 缺点:运转中有振动、冲击和噪声 齿轮安装要求高 不能实现无级变速 不适用中心距较大的场合 第二节渐开线齿廓 一、齿轮传动对齿廓曲线的基本要求 一是传动要平稳,二是承载能力要强 二、渐开线的形成、性质 1、 渐开线的形成 当一条动直线(发生线),沿着一个固定的圆(基圆)作纯滚动时,动直线上任意一点K 的轨 迹称为该圆的渐开线。 1212 21n z i n z ==